
Research on an Improved Method for Galloping Stability Analysis Considering Large Angles of Attack

Abstract
:1. Introduction
2. Theoretical Galloping Force Coefficient Equation
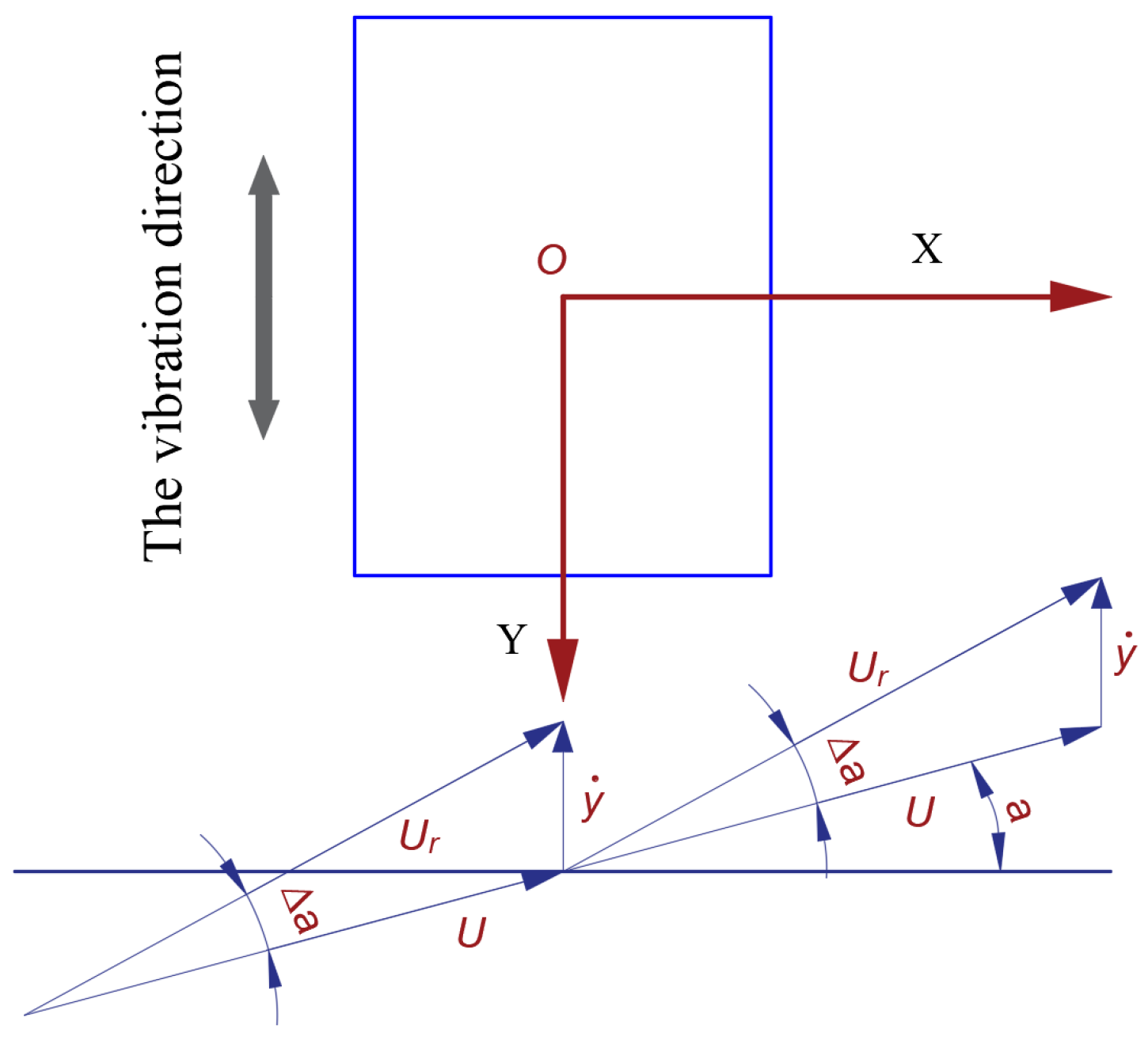
2.1. The Improved Method
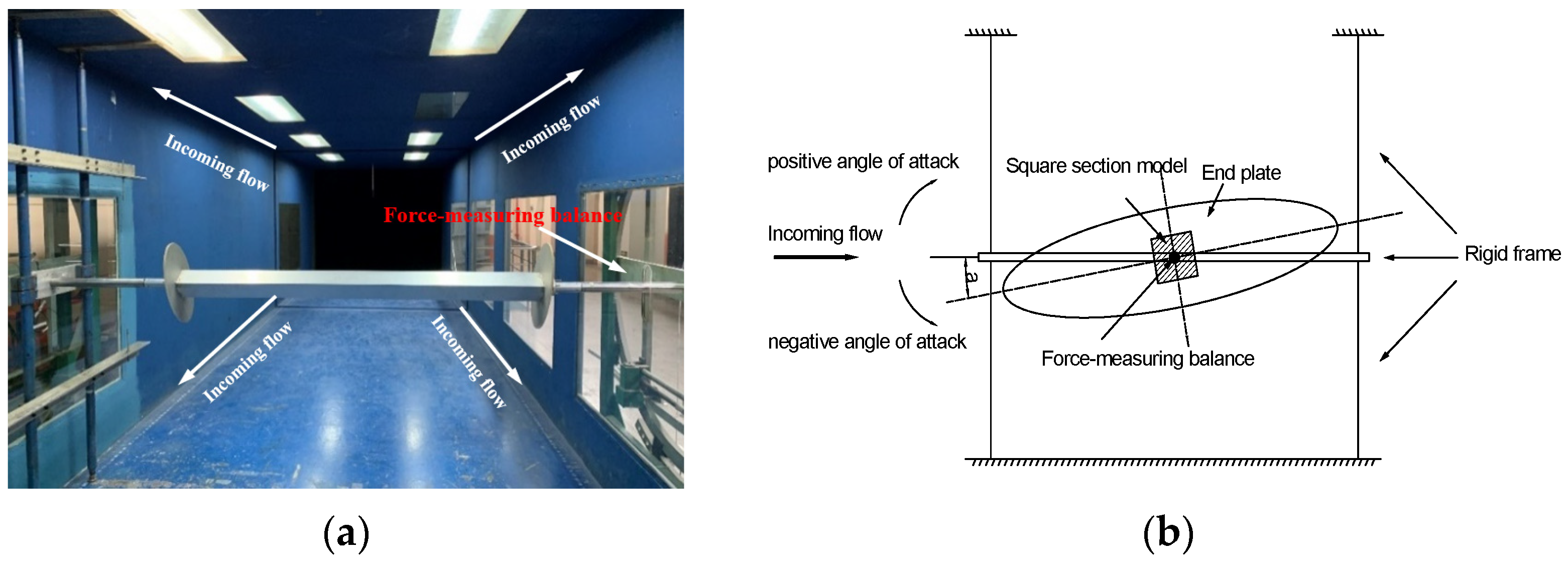
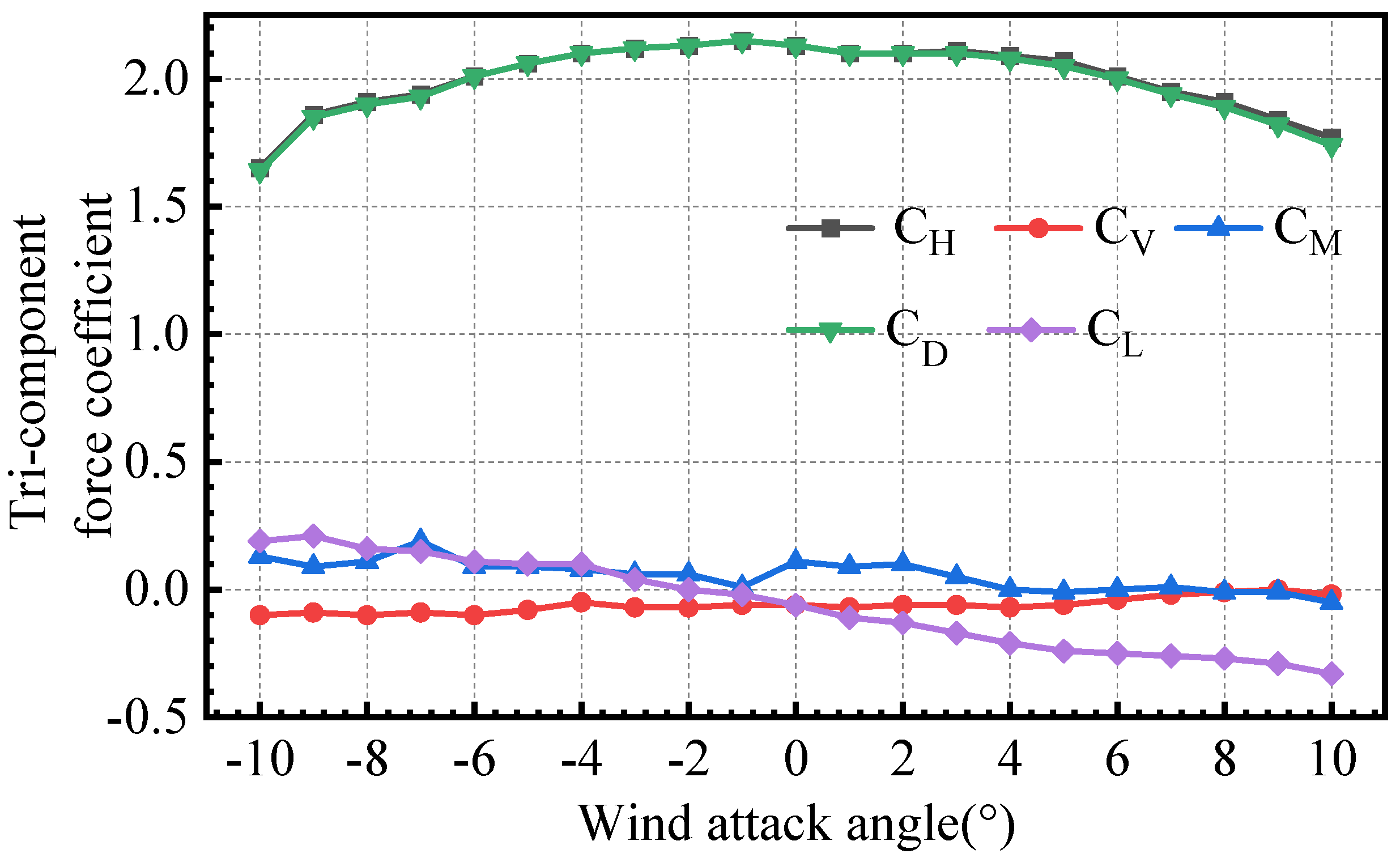
2.2. Wind Tunnel Tests
2.3. Theoretical Solution
3. Verification of the Critical Wind Speed of Galloping
3.1. Force and Vibration Tests on an H-Type Hanger-Section Model
3.2. Comparison and Analysis of the Theoretical Results
4. Numerical Simulation
4.1. Governing Equations and Discretization Methods
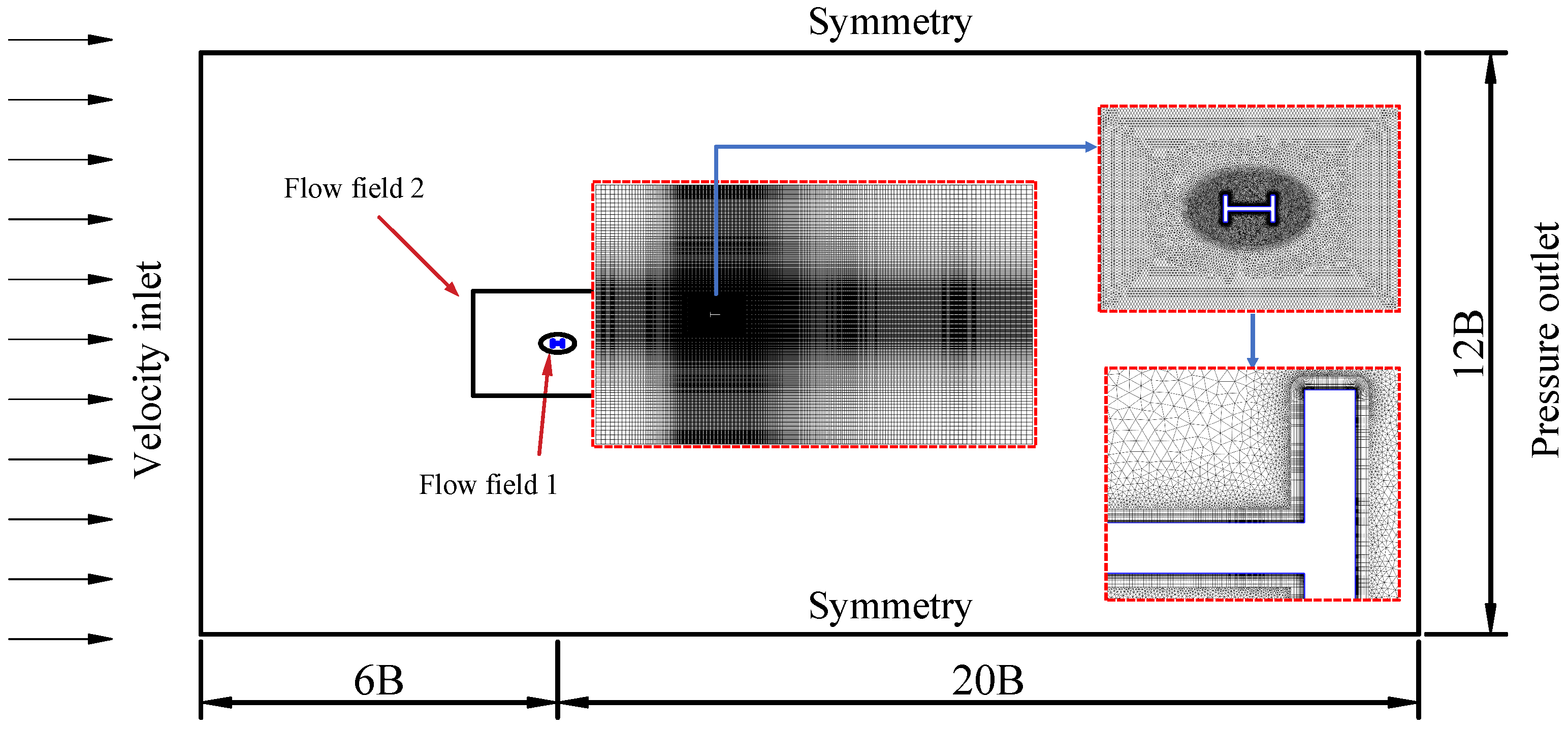
4.2. Computational Domain Mesh and Flow Condition Settings
4.3. Independence Verification and Comparison of the Results
4.4. Comparison of Numerical Simulation and Experimental Results
4.5. Results of the Numerical Simulations
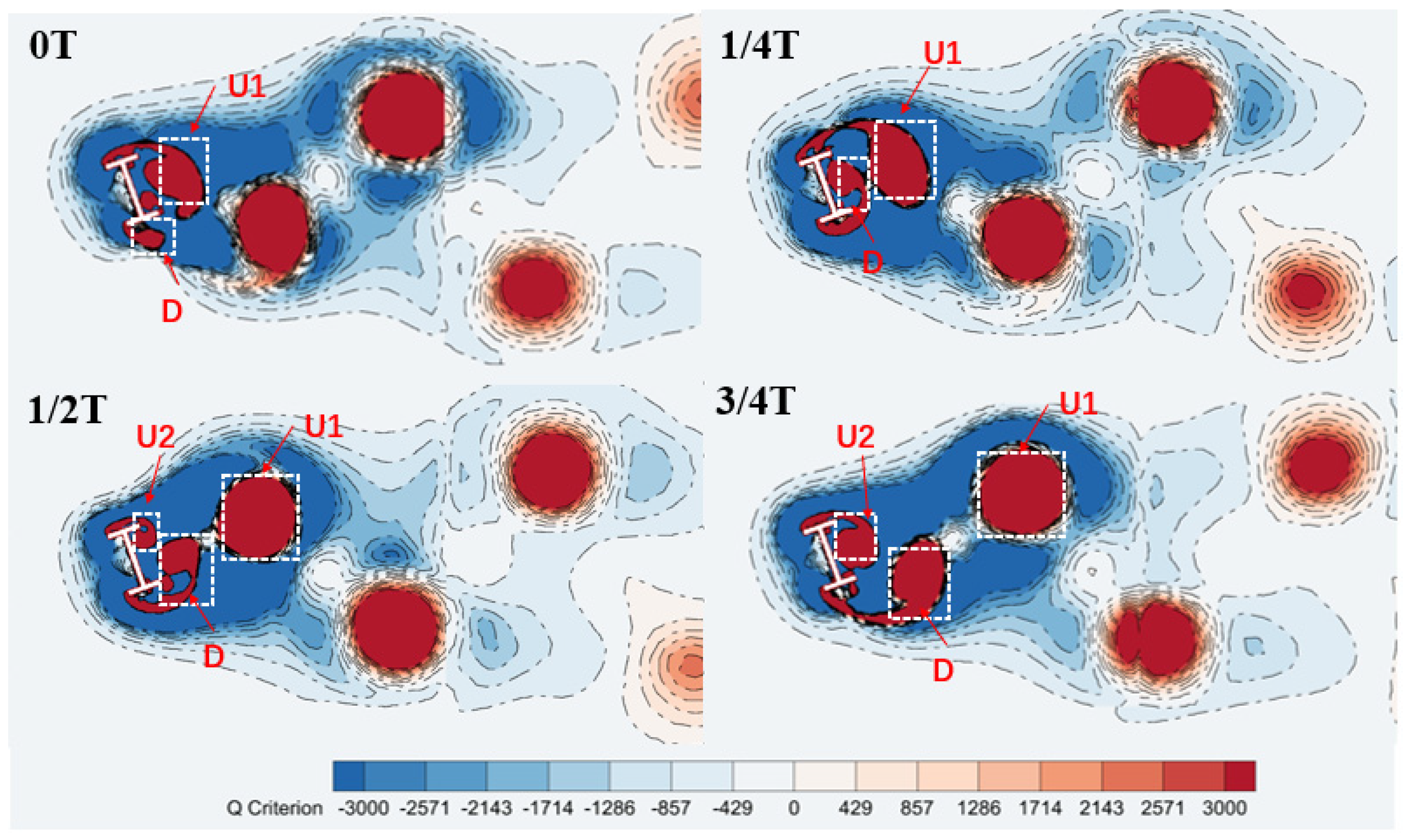
4.5.1. Characteristics of the Evolution of Vorticity around the H-Shaped Section
4.5.2. Trace Diagram of the Flow Field around the Section
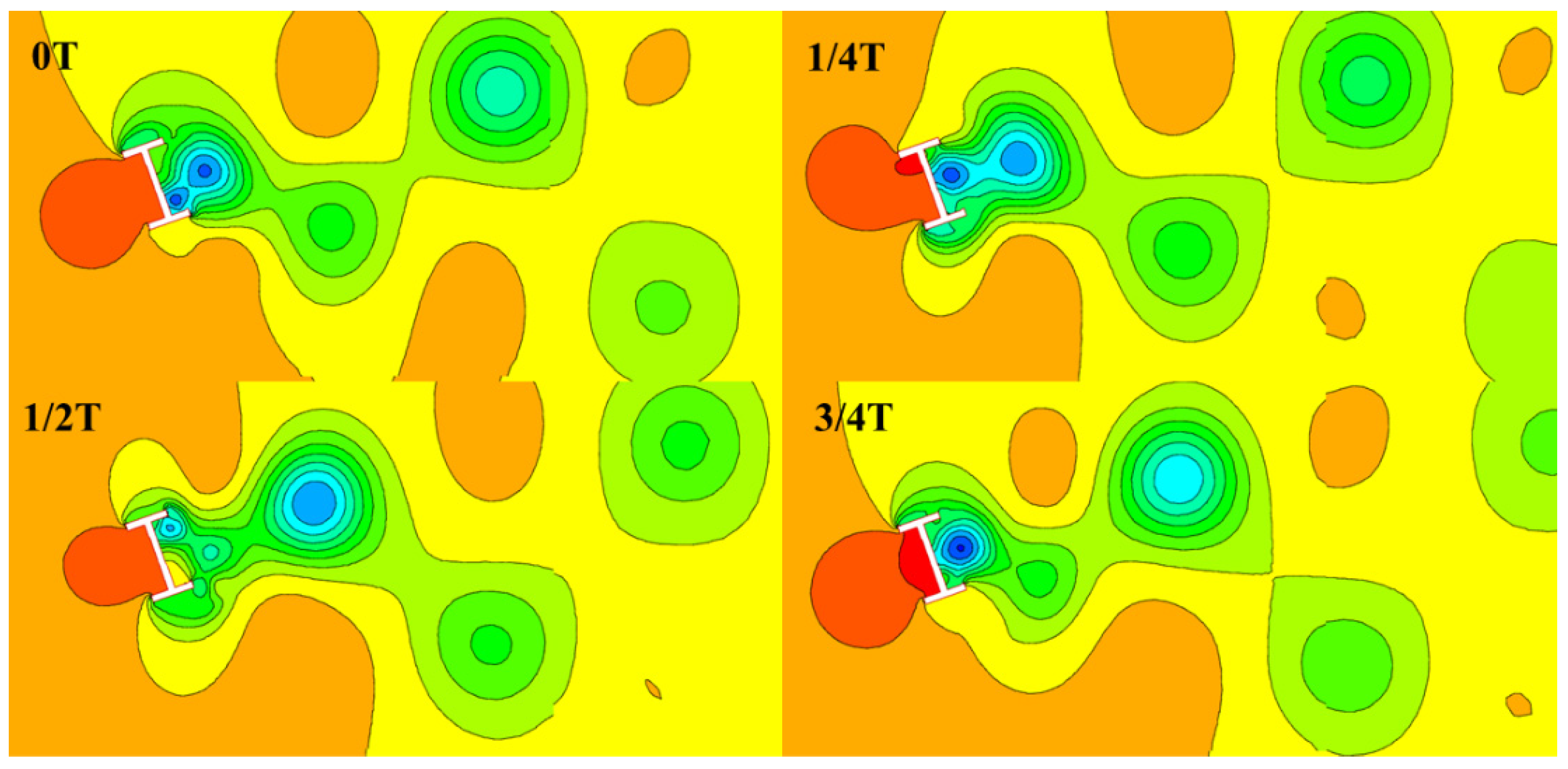
4.5.3. Pressure Distribution around the H-Shaped Section
5. Conclusions
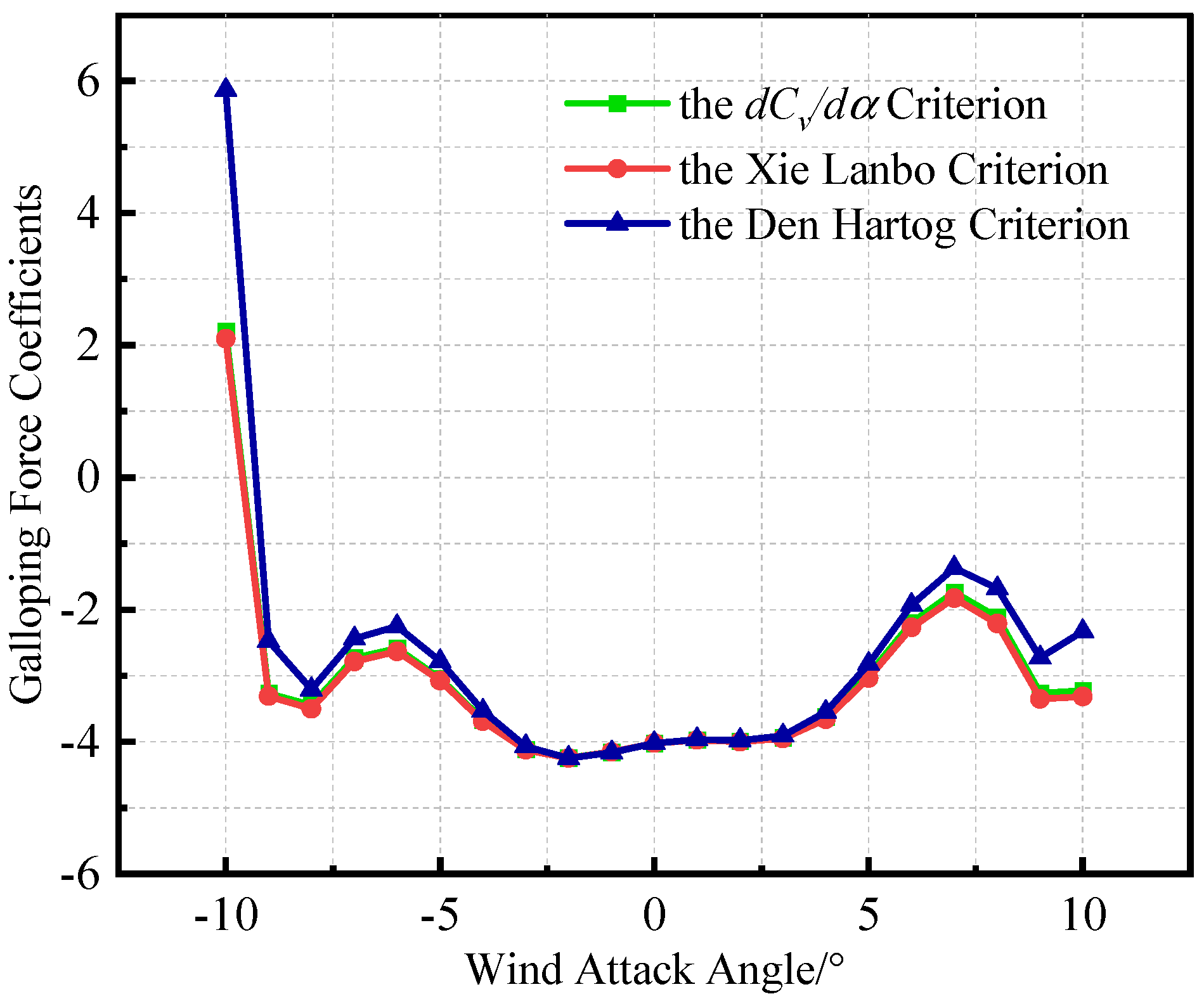
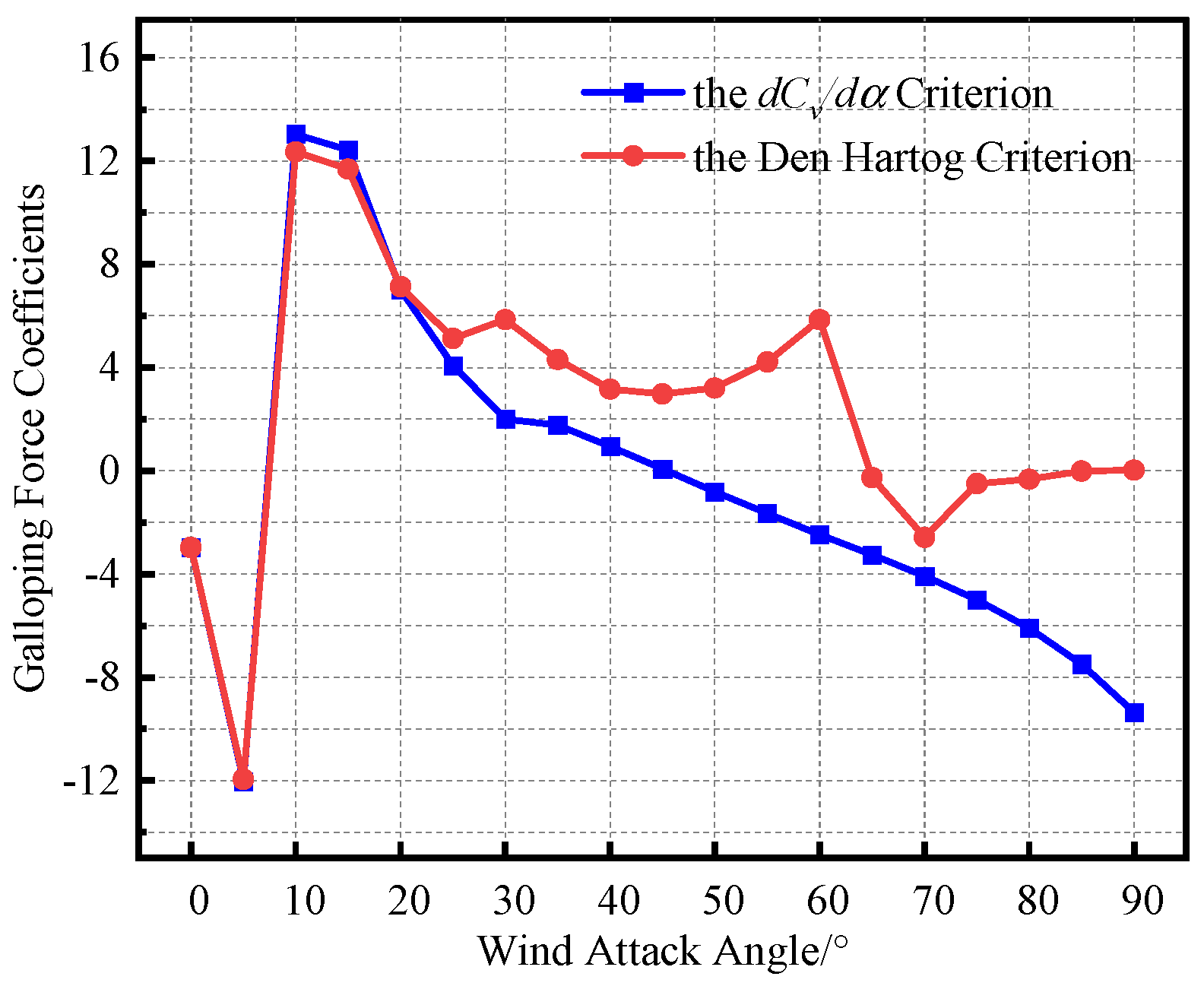
- Compared with the classical Den Hartog calculation method and the method proposed by Xie, this study proposes a modified judgment criterion for the galloping force coefficient that considers the impact of the wind attack angle. In the range of wind attack angles of less than 25°, the calculation results were basically consistent. The correction method proposed in this study was better than the classical calculation method based on the Den Hartog criterion, which did not consider the influence of the wind attack angle.
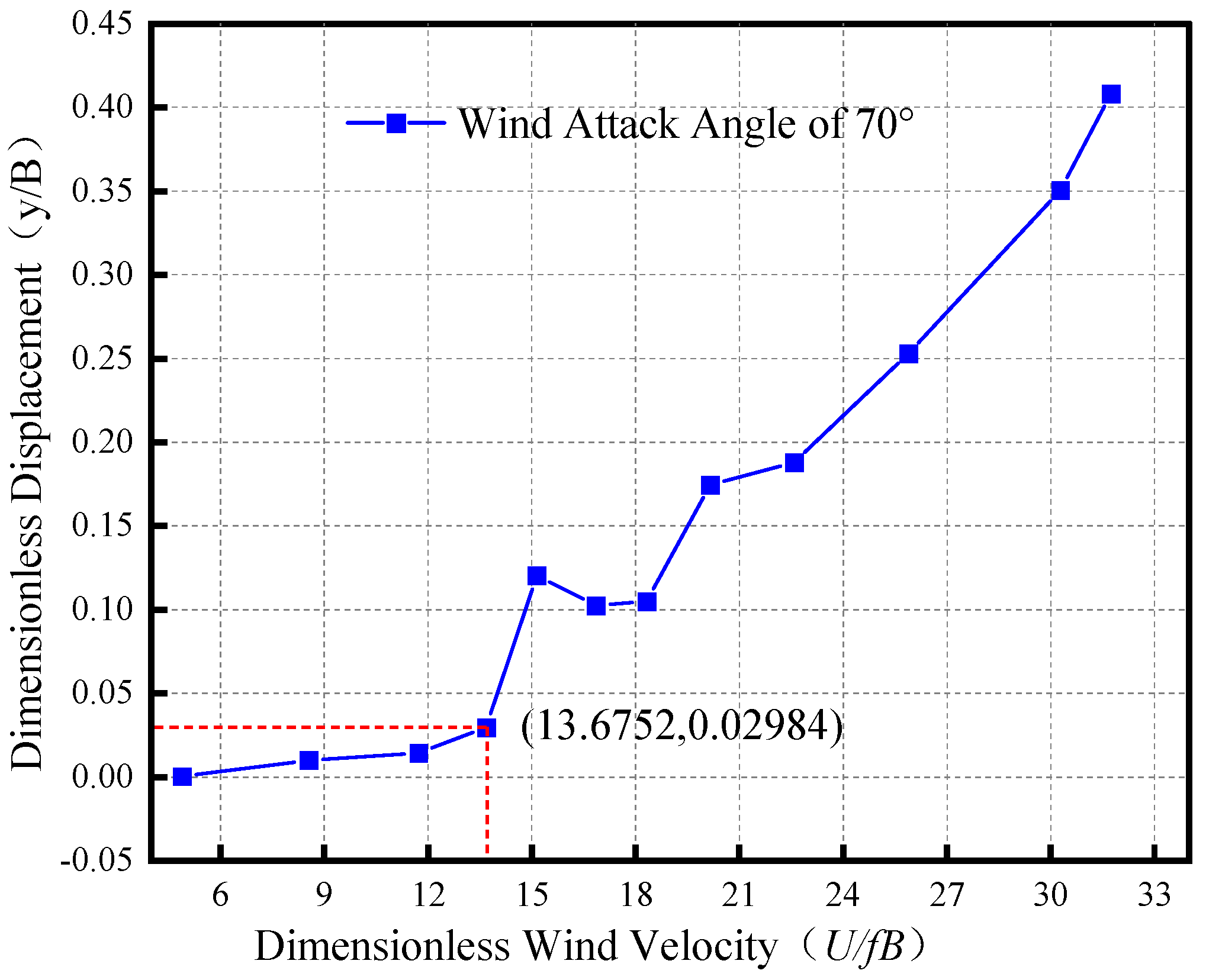
- To further verify the applicability of this method, a model wind tunnel test was conducted on an H-shaped section at a high angle of attack. It was found that the critical wind speed of galloping calculated with the method that considered the wind’s angle of attack was 10.2 m/s, which was closer to the critical wind speed of 11.2 m/s measured in the wind tunnel.
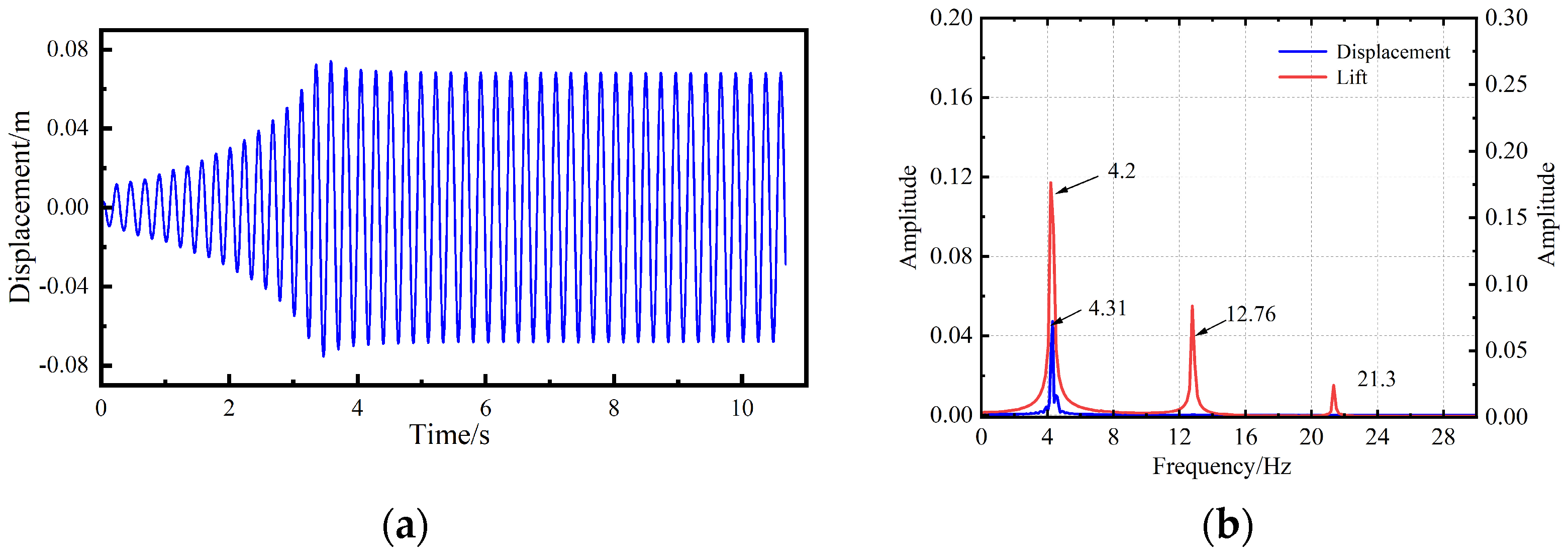
- The results of the numerical simulation showed that at the critical wind speed of galloping, there was obvious airflow separation around the H-shaped section, and a large number of vortices fell off at the tail edge of the section, resulting in the instability of the section, which further verified the existence of severe aerodynamic instability at this wind speed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Parkinson, G.V. Wind-induced Instability of Structures. Philos. Trans. R. Soc. 1971, 269, 395–409. [Google Scholar]
- Païdoussis, M.P.; Price, S.J.; De Langre, E. Fluid-Structure Interactions: Cross-Flow-Induced Instabilities; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Robertson, I.; Li, L.; Sherwin, S.; Bearman, P. A numerical study of rotational and transverse galloping rectangular bodies. J. Fluids Struct. 2003, 17, 681–699. [Google Scholar] [CrossRef]
- Alonso, G.; Meseguer, J.; Pérez-Grande, I. Galloping instabilities of two-dimensional triangular cross-section bodies. Exp. Fluids 2005, 38, 789–795. [Google Scholar] [CrossRef]
- Alonso, G.; Meseguer, J.; Pérez-Grande, I. Galloping stability of triangular cross-sectional bodies: A systematic approach. J. Wind Eng. Ind. Aerodyn. 2007, 95, 928–940. [Google Scholar] [CrossRef]
- Alonso, G.; Sanz-Lobera, A.; Meseguer, J. Hysteresis phenomena in transverse galloping of triangular cross-section bodies. J. Fluids Struct. 2012, 33, 243–251. [Google Scholar] [CrossRef]
- Barrero-Gil, A.; Sanz-Andrés, A.; Alonso, G. Hysteresis in transverse galloping: The role of the inflection points. J. Fluids Struct. 2009, 25, 1007–1020. [Google Scholar] [CrossRef]
- Abdelkefi, A.; Hajj, M.R.; Nayfeh, A.H. Piezoelectric energy harvesting from transverse galloping of bluff bodies. Smart Mater. Struct. 2012, 22, 015014. [Google Scholar] [CrossRef]
- Shoshani, O. Theoretical aspects of transverse galloping. Nonlinear Dyn. 2018, 94, 2685–2696. [Google Scholar] [CrossRef]
- Regev, S.; Shoshani, O. Investigation of transverse galloping in the presence of structural nonlinearities: Theory and experiment. Nonlinear Dyn. 2020, 102, 1197–1207. [Google Scholar] [CrossRef]
- Bearman, P.W.; Luo, S.C. Investigation of the aerodynamic instability of a square-section cylinder by forced oscillation. J. Fluids Struct. 1988, 2, 161–176. [Google Scholar] [CrossRef]
- Nakamura, Y.; Matsukawa, T. Vortex excitation of rectangular cylinders with a long side normal to the flow. J. Fluid Mech. 1987, 180, 171–191. [Google Scholar] [CrossRef]
- Obasaju, E.D. An investigation of the effects of incidence on the flow around a square section cylinder. Aeronaut. Q. 1983, 34, 243–259. [Google Scholar] [CrossRef]
- Niu, H.; Zhou, S.; Chen, Z.; Hua, X. An empirical model for amplitude prediction on VIV-galloping instability of rectangular cylinders. Wind Struct. 2015, 21, 85–103. [Google Scholar] [CrossRef]
- Chen, Z.Q.; Liu, M.G.; Hua, X.G.; Mou, T. Flutter, galloping, and vortex-induced vibrations of H-section hangers. J. Bridge Eng. 2012, 17, 500–508. [Google Scholar] [CrossRef]
- Bai, H.; Li, R.; Guo, C.M.; Li, J.W.; Zhang, Y.J. Optimization of aerodynamic performance of H-section hangers. J. Vib. Shock 2020, 39, 186–193. [Google Scholar]
- Ma, T.F. Influence of Mass and Damping Parameters and Turbulence on Galloping and Vortex-Induced Vibration of H-Shape Hanger. Master’s Thesis, Chang’an University, Xi’an, China, 2019. [Google Scholar]
- Xie, L.B. Study on the Nonlinear Self-Excited Aerodynamic Force and Galloping Characteristics of H-Shaped Cross Section Structures. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 2016. [Google Scholar]
- Gao, G.; Zhu, L. Measurement and verification of unsteady galloping force on a rectangular 2: 1 cylinder. J. Wind Eng. Ind. Aerodyn. 2016, 157, 76–94. [Google Scholar] [CrossRef]
- Gao, G.; Zhu, L. Nonlinear mathematical model of unsteady galloping force on a rectangular 2: 1 cylinder. J. Fluids Struct. 2017, 70, 47–71. [Google Scholar] [CrossRef]
- Mannini, C.; Massai, T.; Marra, A.M. Modeling the interference of vortex-induced vibration and galloping for a slender rectangular prism. J. Sound Vib. 2018, 419, 493–509. [Google Scholar] [CrossRef]
- Chen, C.; Mannini, C.; Bartoli, G.; Thiele, K. Experimental study and mathematical modeling on the unsteady galloping of a bridge deck with open cross section. J. Wind Eng. Ind. Aerodyn. 2020, 203, 104170. [Google Scholar] [CrossRef]
- Tang, H.J.; Li, Y.L.; Liao, H.L. Energy method of galloping analysis for 2D square cylinder. J. Basic Sci. Energy 2015, 23, 104–114. [Google Scholar]
- Chen, K. Experimental study on galloping characteristic and improvement measure for single column tower by wind tunnel test. Railw. Eng. 2017, 57, 34–35. [Google Scholar]
- Yan, Z.C.; Yang, J.X.; Ni, Z.J.; Wu, R.H.; Zhang, L.L. Research on galloping vibration of cable-stayed bridge with single-column tower and variable cross-section. Highway 2020, 65, 207–211. [Google Scholar]
- Li, S.Y.; Wu, T.; Huang, T. Aerodynamic stability of iced stay cables on cable-stayed bridge. Wind Struct. 2016, 23, 253–273. [Google Scholar] [CrossRef]
- Li, S.Y.; Zheng, Q.Y.; Wen, X.G.; Chen, Z. Numerical simulations and tests for dry galloping mechanism of stay cables. J. Vib. Shock 2017, 36, 100–105. [Google Scholar]
- Ma, W.Y.; Yuan, X.X.; Wei, Y.Y.; Liu, Q.K. Effect of Reynolds number on aerodynamic force on and galloping instability of a cylinder with elliptical cross-section. J. Vib. Eng. 2016, 29, 730–736. [Google Scholar] [CrossRef]
- Ma, W.Y.; Zhang, L.; Zhang, X.B.; Deng, R.R. Effect of yaw angle on the galloping instability of slender square structures. J. Vib. Shock 2021, 40, 171–175+184. [Google Scholar]
- Xie, L.B.; Liao, H.L. Galloping calculation method for prisms with attack angle. J. Vib. Shock 2018, 37, 9–15+24. [Google Scholar]
- Tang, H.J. Wind-Induced Vibration and Aerodynamic Measures of Long-Span Suspension Bridges with Steel Truss Girder in Complex Mountainous Canyon. Ph.D. Thesis, Southwest Jiaotong University, Chengdu, China, 2016. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Mannini, C.; Šoda, A.; Schewe, G. Unsteady RANS modelling of flow past a rectangular cylinder: Investigation of Reynolds number effects. Comput. Fluids 2010, 39, 1609–1624. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modality | Pearson | Spearman | Kendall |
|---|---|---|---|
| Third order | 0.92737 | 0.97464 | 0.90389 |
| Fourth order | 0.95118 | 0.97464 | 0.90389 |
| Fifth order | 0.96341 | 0.97464 | 0.90389 |
| Ninth order | 0.94683 | 0.98699 | 0.93978 |
| Den Hartog | (dCV)/dα | Measured | |
|---|---|---|---|
| Critical Wind Speed of Galloping | 16.134 | 10.200 | 11.204 |
| Absolute Error | 4.930 | −1.004 | — |
| Grid | Total Cells | Total Nodes | Triangular Cells | Quadrilateral Cells | Cm | Cl | Cd |
|---|---|---|---|---|---|---|---|
| Mesh1 | 124,392 | 82,402 | 85,880 | 38,512 | 0.000036 | 0.000175 | 1.397378 |
| Mesh2 | 151,394 | 95,993 | 112,882 | 38,512 | 0.000047 | 0.000152 | 1.403204 |
| Mesh3 | 175,878 | 108,235 | 137,366 | 38,512 | 0.000041 | 0.000106 | 1.410183 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Z.; Li, J.; Liu, S.; Li, H.; Wang, F. Research on an Improved Method for Galloping Stability Analysis Considering Large Angles of Attack. Appl. Sci. 2023, 13, 5390. https://doi.org/10.3390/app13095390
Ma Z, Li J, Liu S, Li H, Wang F. Research on an Improved Method for Galloping Stability Analysis Considering Large Angles of Attack. Applied Sciences. 2023; 13(9):5390. https://doi.org/10.3390/app13095390
Chicago/Turabian StyleMa, Zhenxing, Jiawu Li, Shuangrui Liu, Han Li, and Feng Wang. 2023. "Research on an Improved Method for Galloping Stability Analysis Considering Large Angles of Attack" Applied Sciences 13, no. 9: 5390. https://doi.org/10.3390/app13095390