
Investigation of Geometric and Hardness Parameters of Tank Track Grooves Equipped on Photovoltaic Cleaning Robot

 , , , and
, , , and
Abstract
:1. Introduction
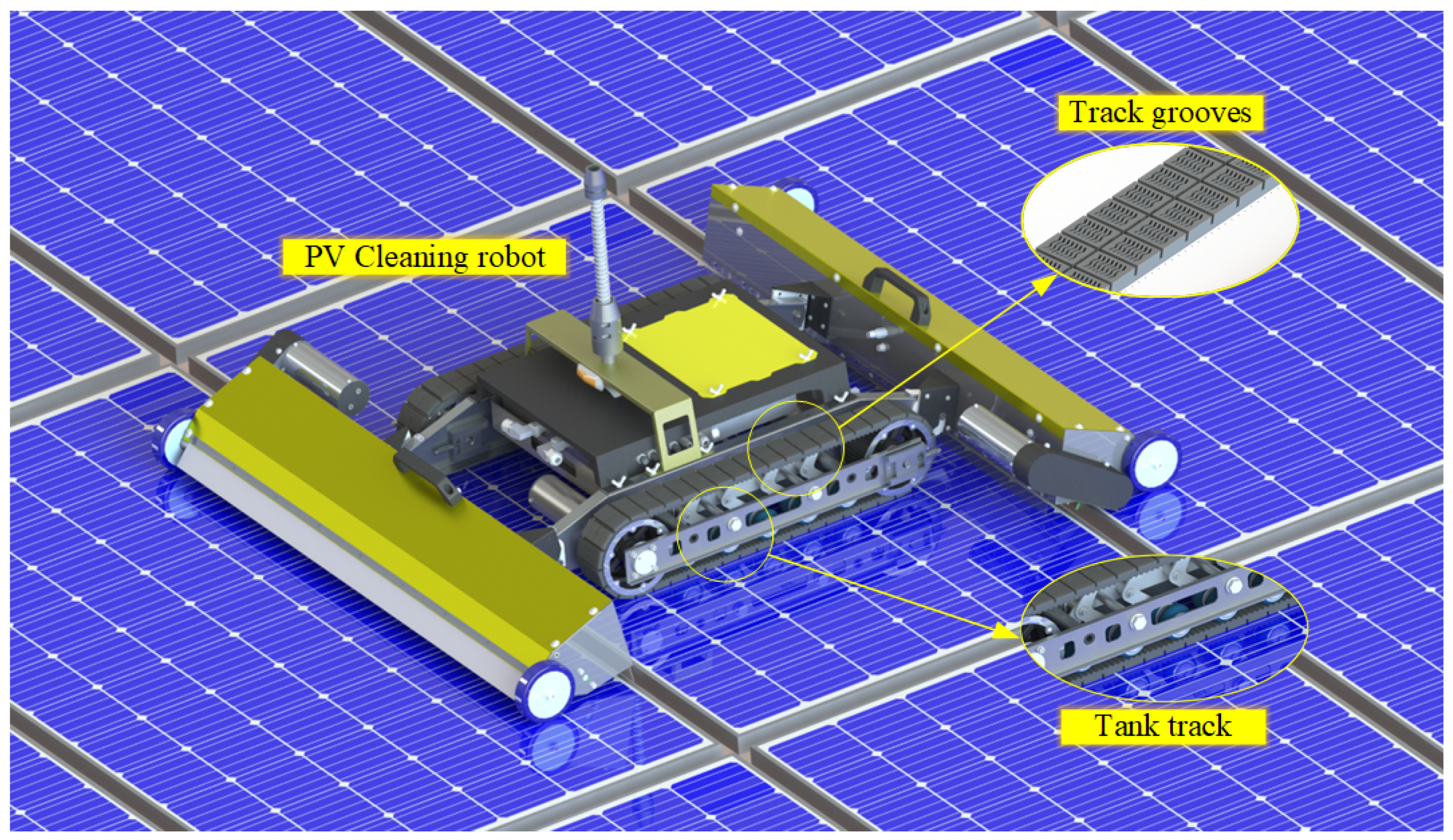
- A novel slip resistance test apparatus is proposed to assess the friction index of material coatings for the belt-based track utilized by the PV cleaning robot;
- The proposed apparatus investigates the relationship between COSF and various factors, including shore hardness, contact area, and outsole pattern;
- The derived relationships provide proper suggestions relating to shore hardness, area density, and outsole pattern for the construction of belt-based tracks equipped to PV cleaning robots.
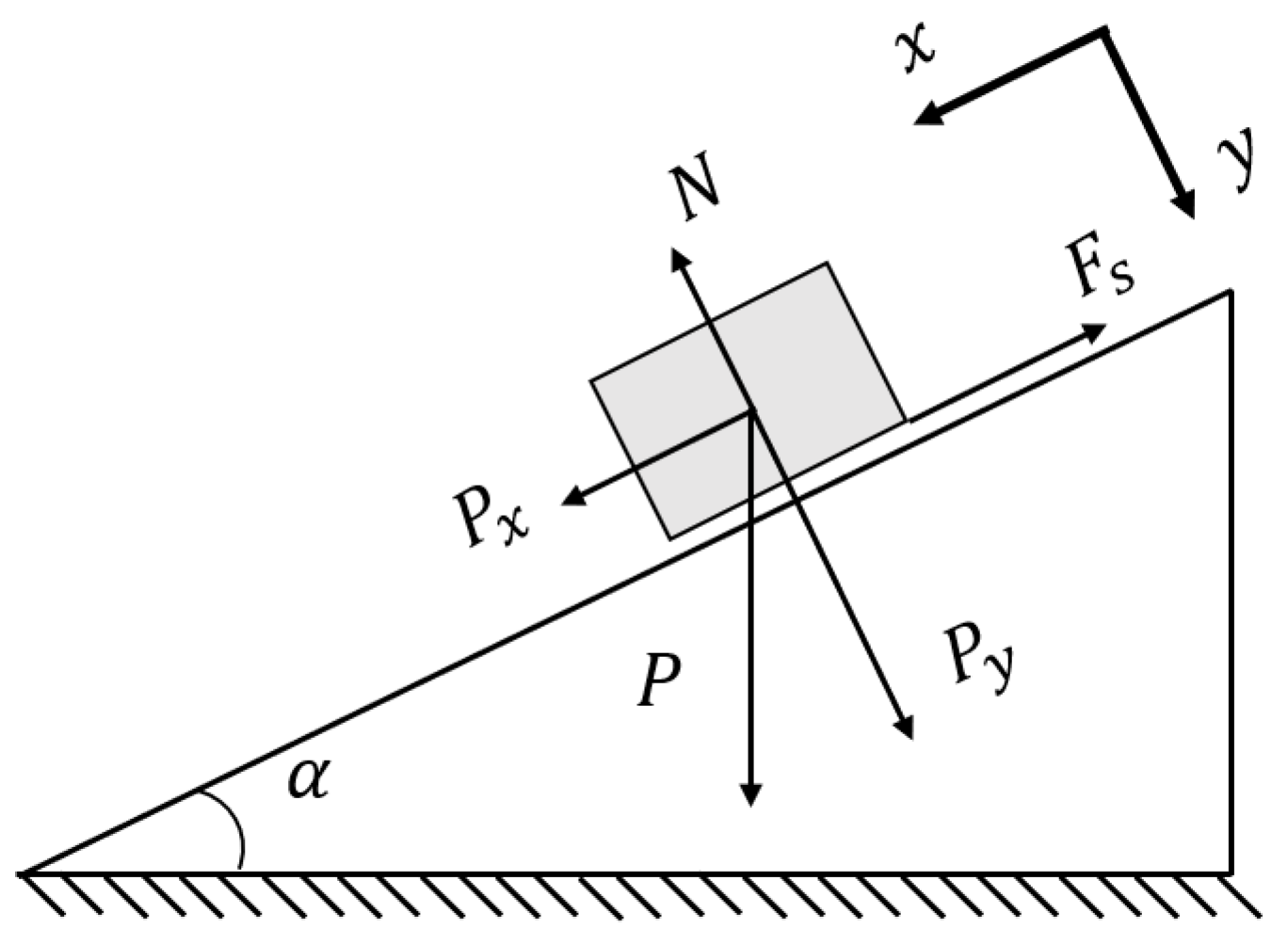
2. Theoretical Background
3. Instrumentation
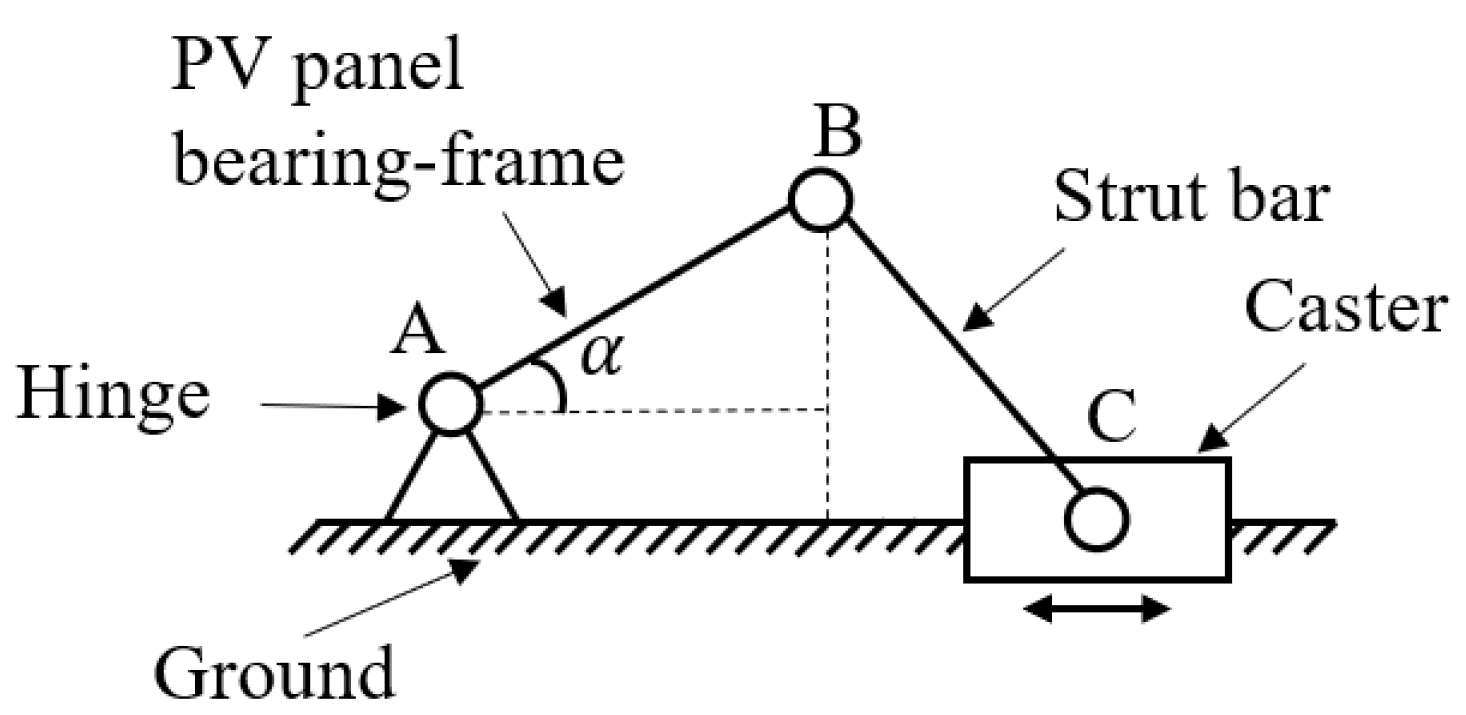
3.1. Tilt Angle Measurement
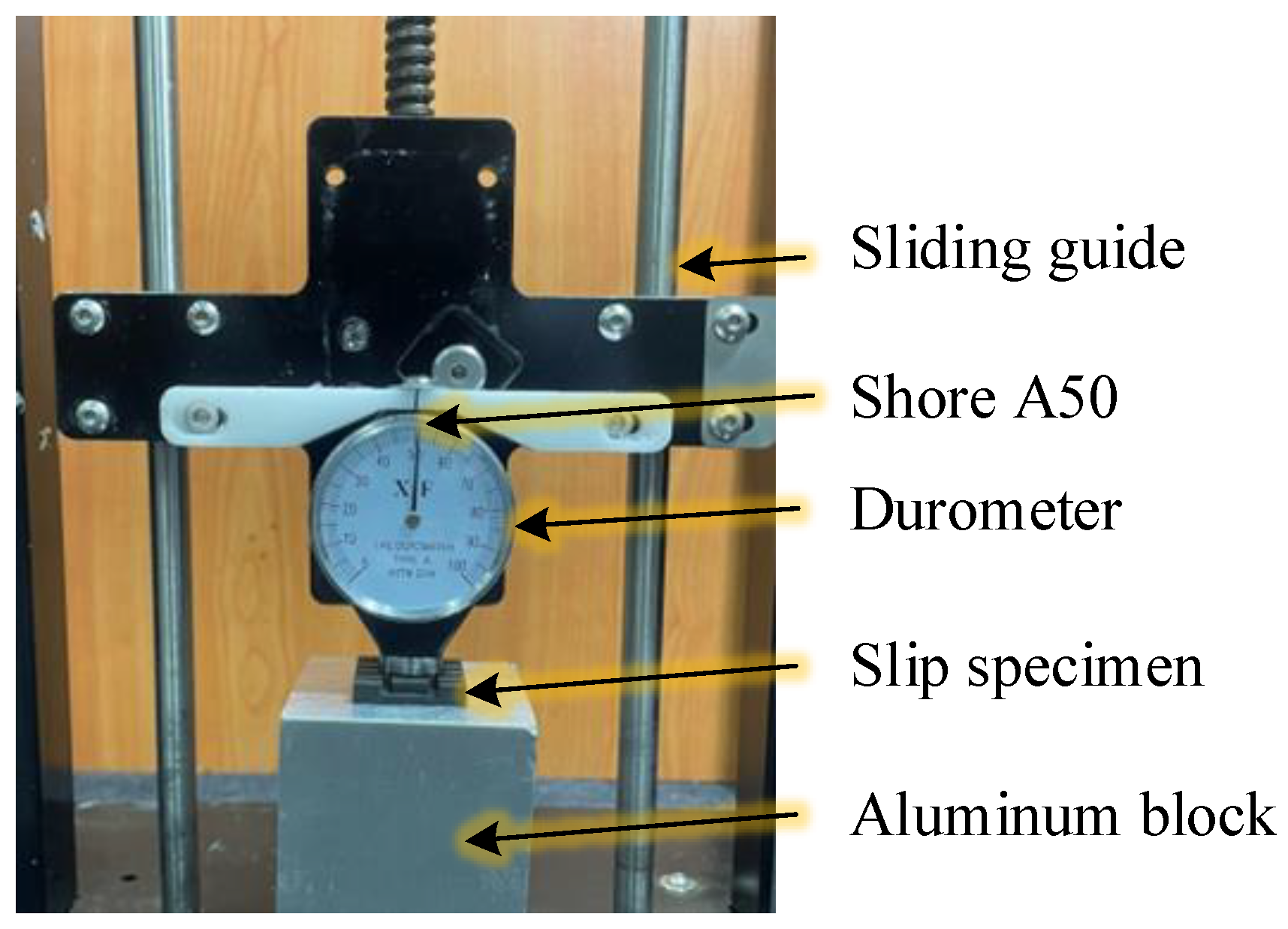
3.2. COSF Measurement
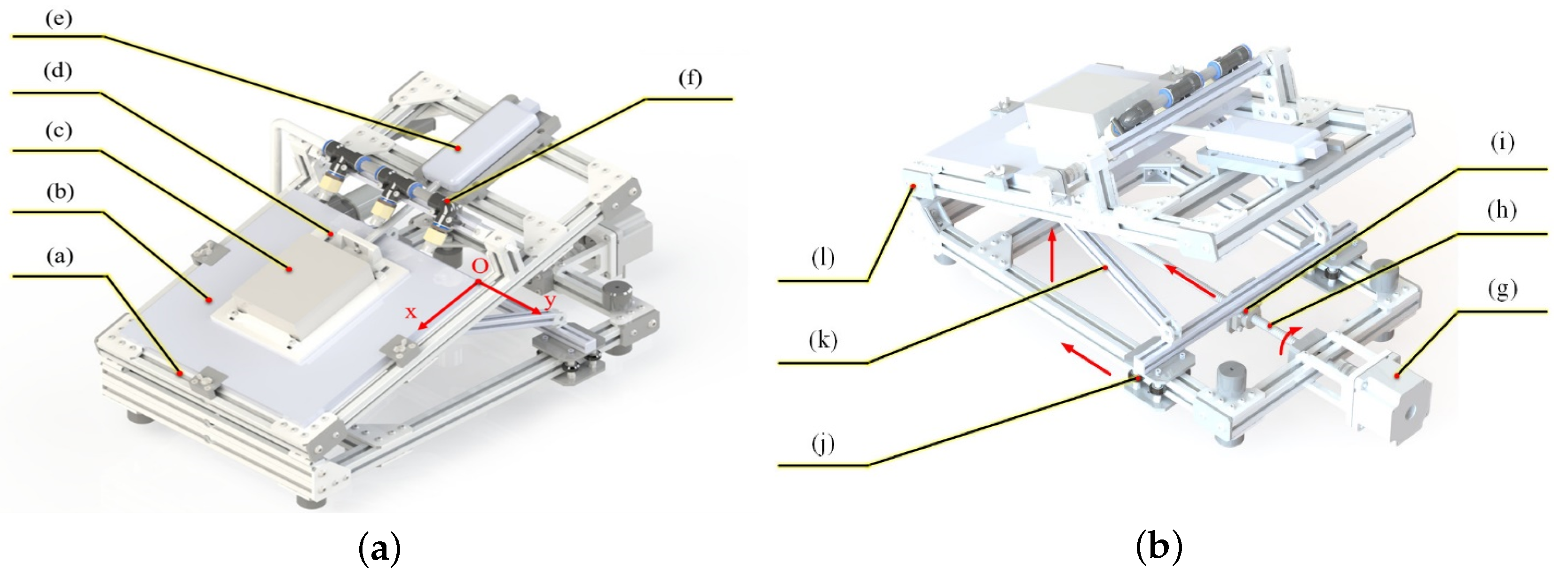
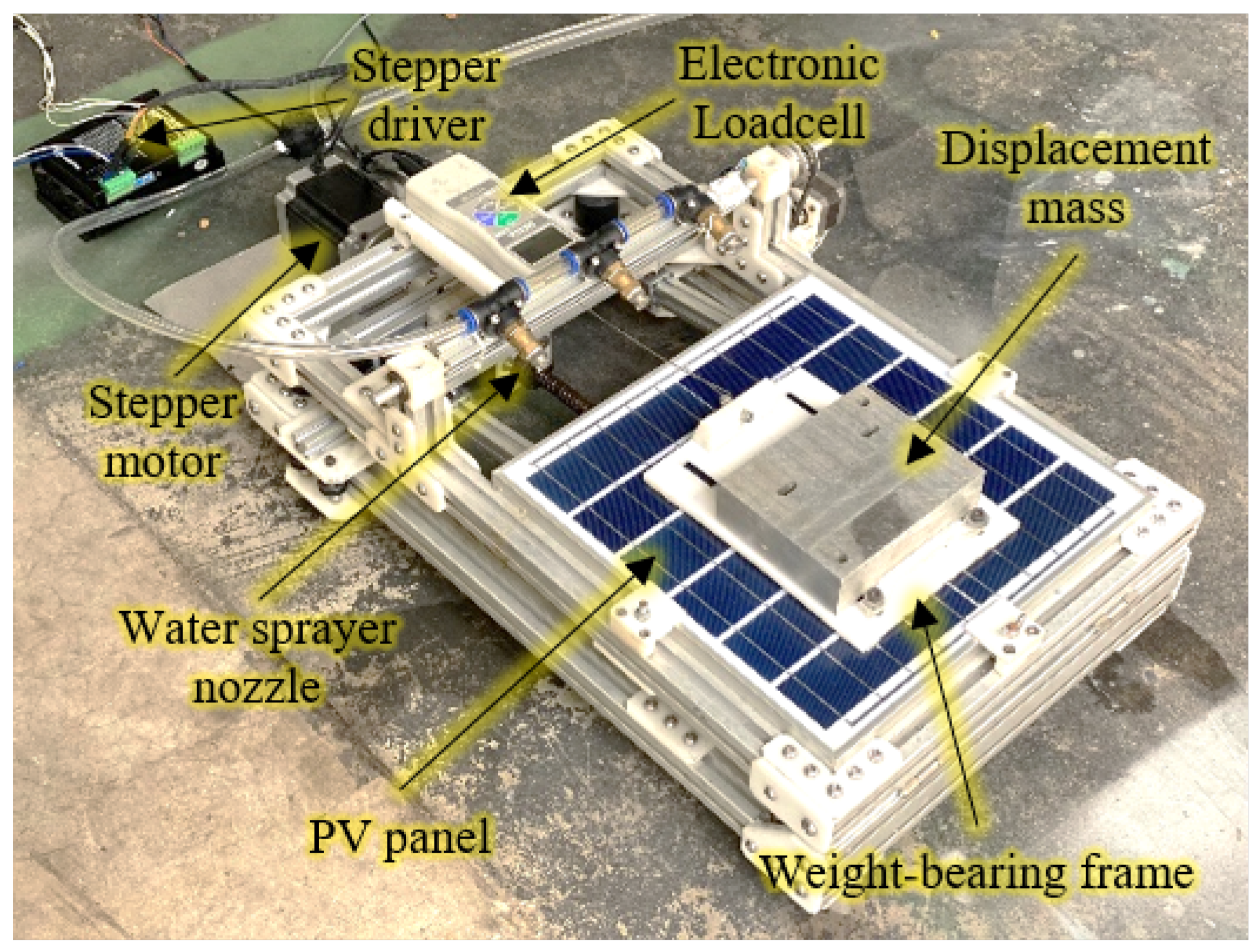
4. Experiment Setup
- Attach numerous synthetic rubber track grooves with a specific shore hardness, outsole pattern, or contact area to the bottom side of the weight-bearing frame;
- Position the weight-bearing frame on the PV panel and mount it to the electronic loadcell through the strut bar;
- Gradually decrease the tilt angle of the PV panel until it reaches the minimum value;
- The theoretical tilt angle is calibrated using an inclinometer;
- Adjust the clamp position of the electronic load cell to provide the median tensile force, then zero-return the electronic load cell;
- Supply water with a specific flow rate to simulate the wet working condition, or;
- Clean water on the PV panel to facilitate the dry working condition;
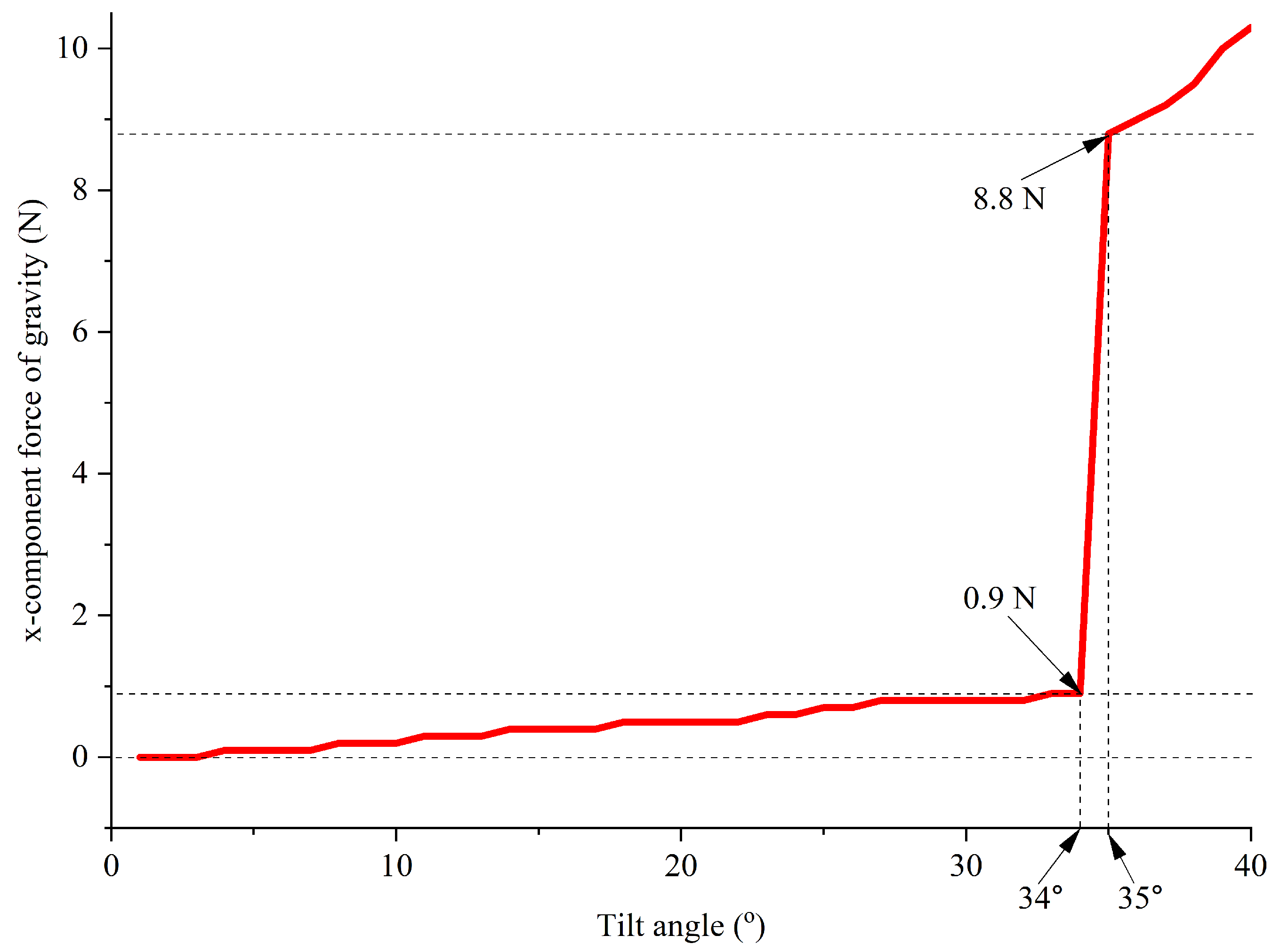
- Increase the tilt angle with the increment of 1° (approximately 10 mm of the caster) until slipping occurs;
- A slip occurs when the electronic loadcell indicates an abruptly large change;
- Record the tilt angle and the tensile force at the slipping occurrence;
- Compute the COSF through the two-step procedure.
5. Results and Discussion
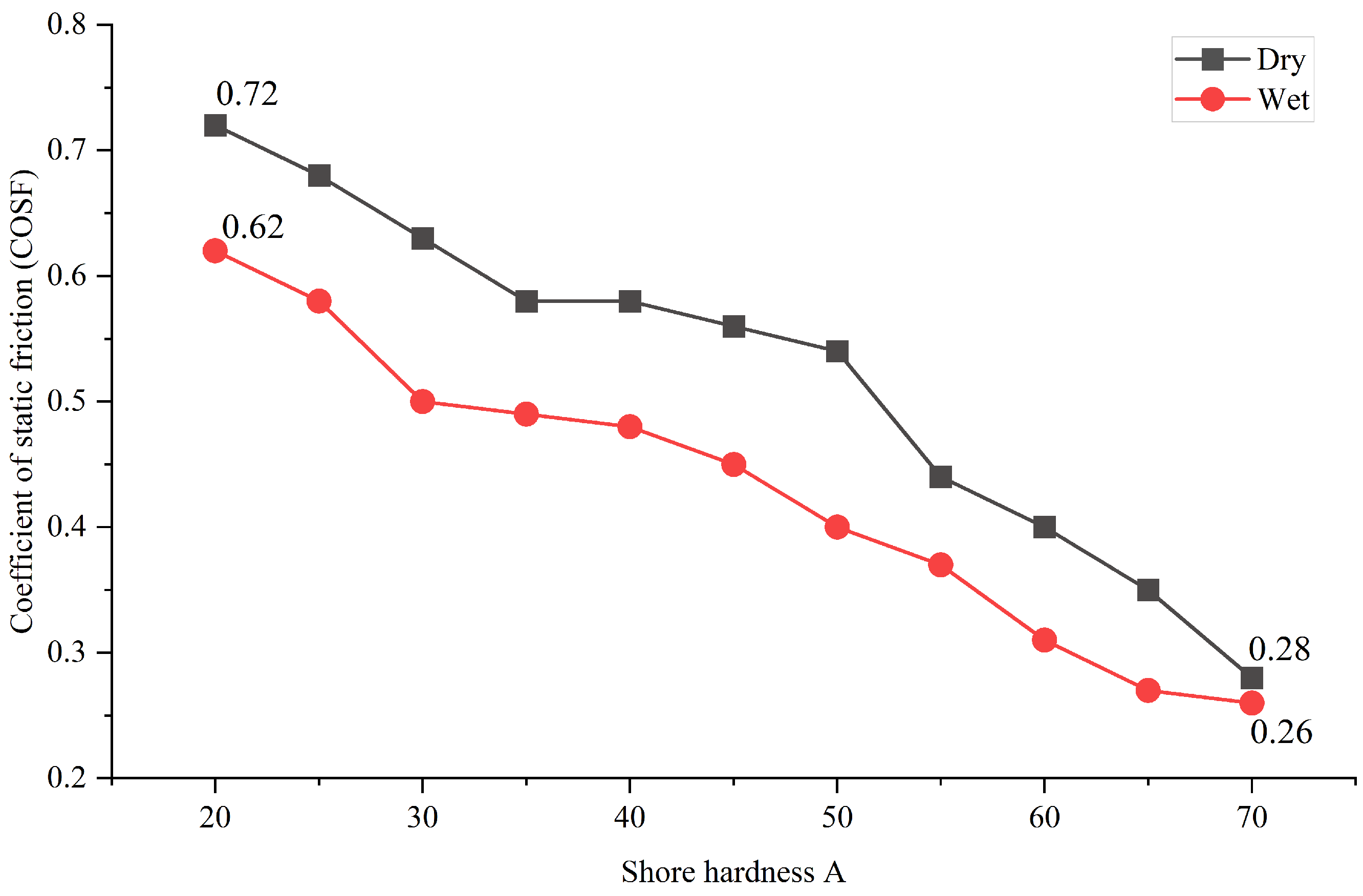
5.1. Relationship between Shore Hardness and COSF
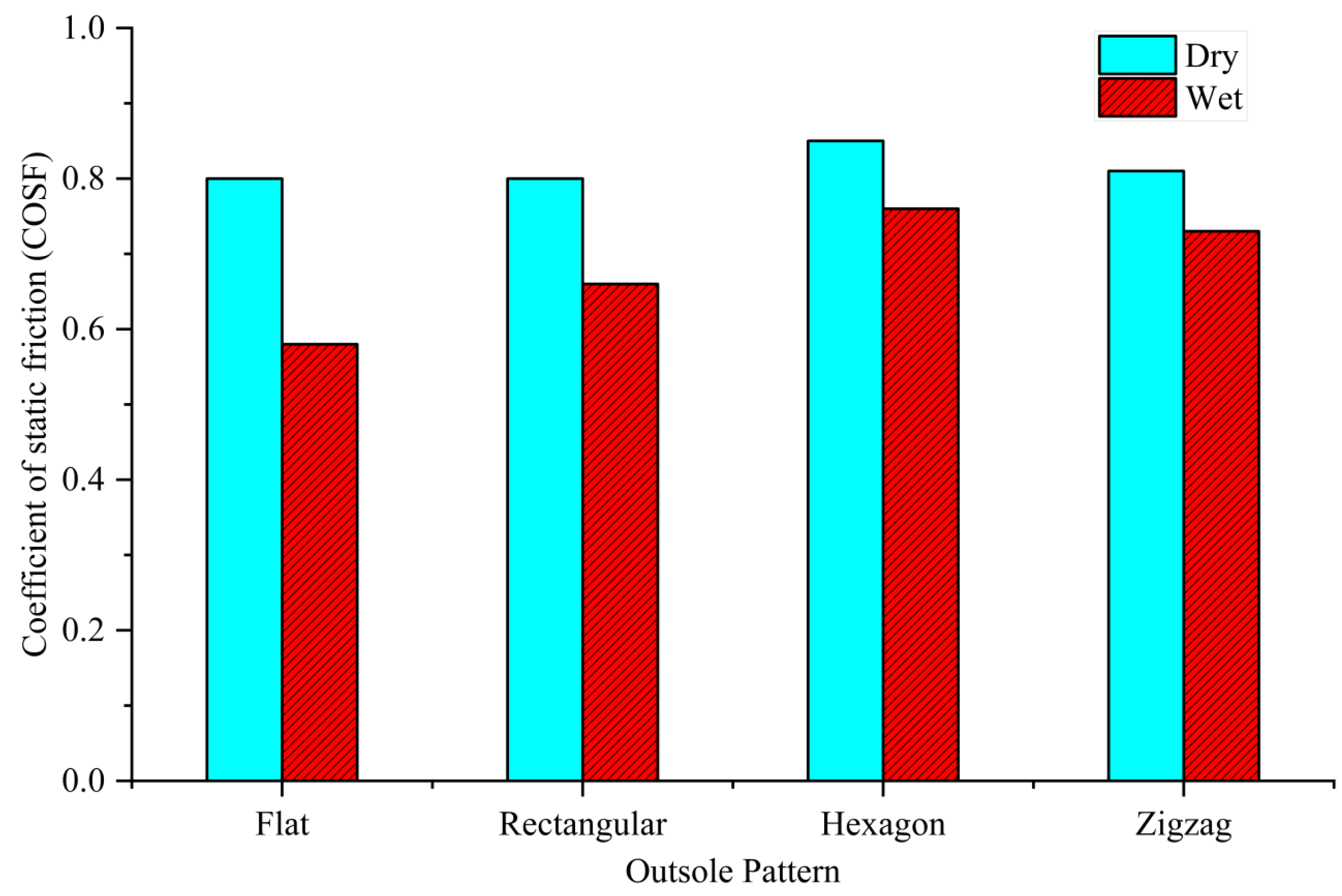
5.2. Relationship between Outsole Pattern and COSF
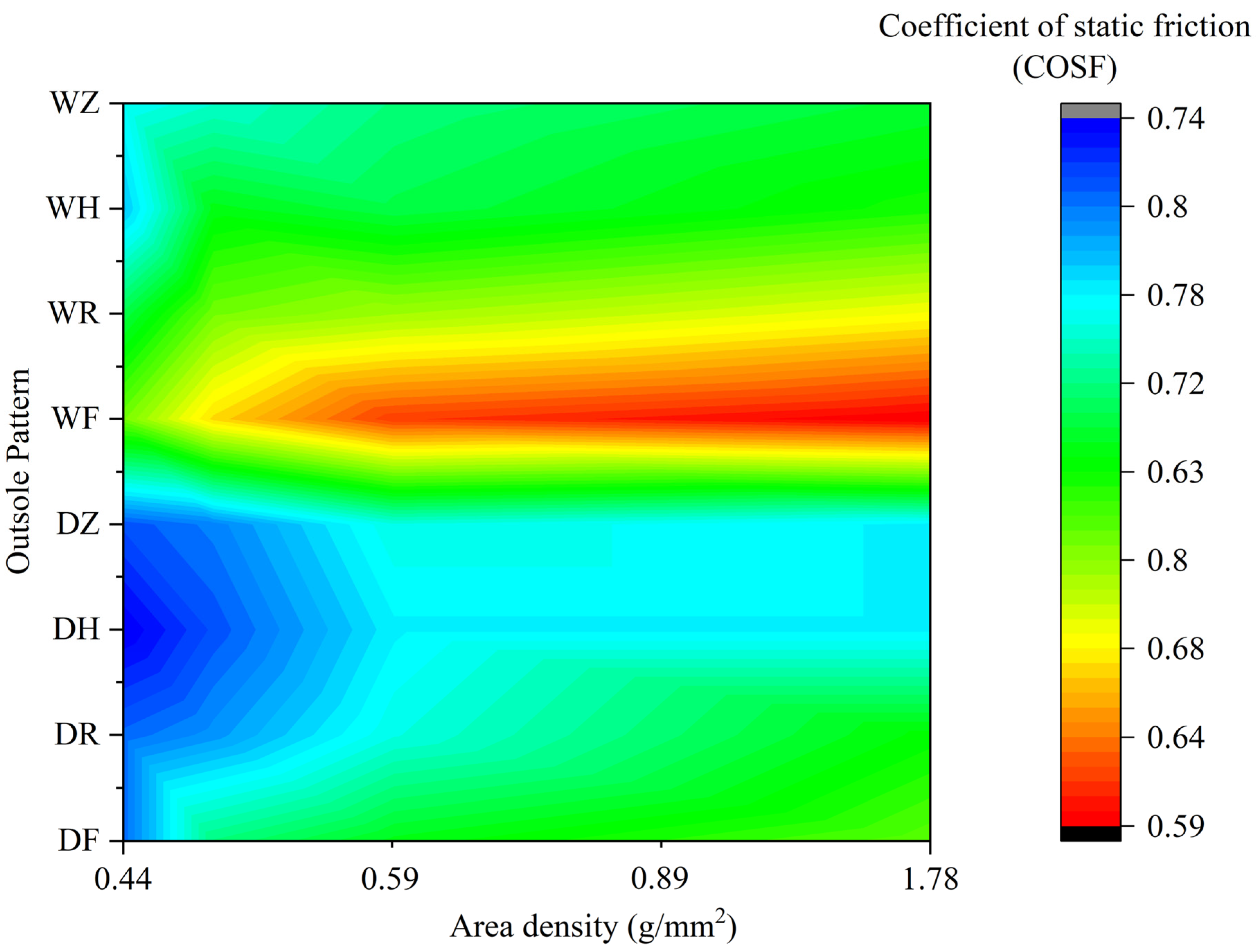
5.3. Relationship between Area Density and COSF
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sayyah, A.; Horenstein, M.; Mazumder, M. Energy yield loss caused by dust deposition on photovoltaic panels. Sol. Energy 2014, 107, 576–604. [Google Scholar] [CrossRef]
- Jiang, H.; Lu, L.; Sun, K. Experimental investigation of the impact of airborne dust deposition on the performance of solar photovoltaic (PV) modules. Atmos. Environ. 2011, 45, 4299–4304. [Google Scholar] [CrossRef]
- Abderrezek, M.; Fathi, M. Experimental study of the dust effect on photovoltaic panels’ energy yield. Sol. Energy 2017, 142, 308–320. [Google Scholar] [CrossRef]
- Sebbagh, T.; Kelaiaia, R.; Zaatri, A. An experimental validation of the effect of partial shade on the I-V characteristic of PV panel. Int. J. Adv. Manuf. Technol. 2018, 96, 4165–4172. [Google Scholar] [CrossRef]
- Ghazi, S.; Sayigh, A.; Ip, K. Dust effect on flat surfaces—A review paper. Renew. Sustain. Energy Rev. 2014, 33, 742–751. [Google Scholar] [CrossRef]
- Kazem, H.; Chaichan, M.; Al-Waeli, A.; Sopian, K. A review of dust accumulation and cleaning methods for solar photovoltaic systems. J. Clean. Prod. 2020, 276, 123–187. [Google Scholar] [CrossRef]
- Jesus, M.; Timò, G.; Agustín-Sáenz, C.; Braceras, I.; Cornelli, M.; Ferreira, A. Anti-soiling coatings for solar cell cover glass: Climate and surface properties influence. Sol. Energy Mater. Sol. Cells 2018, 299, 517–523. [Google Scholar] [CrossRef]
- Mejia, F.; Kleissl, J.; Bosch, J. The effect of dust on solar photovoltaic systems. Energy Procedia 2014, 49, 2370–2376. [Google Scholar] [CrossRef]
- Assi, A.; Hassan, A.; Al-Shamisi, M.; Hejase, H. Removal of air blown dust from photovoltaic arrays using forced air flow of return air from air conditioning systems. In Proceedings of the International Conference on Renewable Energies for Developing Countries (REDEC), Beirut, Lebanon, 28–29 November 2012; pp. 1–5. [Google Scholar]
- Tanesab, J.; Parlevliet, D.; Whale, J.; Urmee, T. Dust Effect and its Economic Analysis on PV Modules Deployed in a Temperate Climate Zone. Energy Procedia 2016, 100, 65–68. [Google Scholar] [CrossRef]
- Zorrilla-Casanova, J.; Piliougine, M.; Carretero, J.; Bernaola, P.; Carpena, P.; Mora-Lopez, L.; Sidrach-de-Cardona, M. Analysis of Dust Losses in Photovoltaic Modules. In Proceedings of the Linköping Electronic Conference, Linköping, Sweden, 8–13 May 2011; pp. 2985–2992. [Google Scholar]
- Al Shehri, A.; Parrott, B.; Carrasco, P.; Al Saiari, H.; Taie, I. Accelerated testbed for studying the wear, optical and electrical characteristics of dry cleaned PV solar panels. Sol. Energy 2017, 146, 8–19. [Google Scholar] [CrossRef]
- Le, N.T.; Nguyen, M.D.; Phan, T.D.; Truong, C.T.; Duong, V.T.; Nguyen, H.H.; Nguyen, T.T. Development of a Multi-Suspension Unit for Solar Cleaning Robots to Mitigate Vibration Impact on Photovoltaic Panels. Appl. Sci. 2023, 13, 12104. [Google Scholar] [CrossRef]
- Mazumder, M.K.; Sharma, R.; Biris, A.S.; Horenstein, M.N.; Zhang, J.; Ishihara, H.; Stark, J.W.; Blumenthal, S.; Sadder, O. Electrostatic Removal of Particles and its Applications to Self-Cleaning Solar Panels and Solar Concentrators. In Developments in Surface Contamination and Cleaning; William Andrew Publishing: Norwich, NY, USA, 2011; pp. 149–199. [Google Scholar]
- Park, B.; Im, H.; Im, M.; Choi, K. Self-cleaning effect of highly water-repellent microshell structures for solar cell applications. Mater. Chem. 2011, 21, 633–636. [Google Scholar] [CrossRef]
- Verma, K.; Sakhuja, M.; Son, J.; Danner, J.; Yang, H.; Zeng, C.; Bhatia, S. Self-cleaning and antireflective packaging glass for solar modules. Renew. Energy 2011, 36, 2489–2493. [Google Scholar] [CrossRef]
- Vasiljev, P.; Borodinas, S.; Bareikis, R.; Struckas, A. Ultrasonic system for solar panel cleaning. Sens. Actuators A Phys. 2013, 200, 74–78. [Google Scholar] [CrossRef]
- Figgis, B.; Bermudez, V.; Garcia, J. PV module vibration by robotic cleaning. Sol. Energy 2023, 250, 168–172. [Google Scholar] [CrossRef]
- Figgis, B.; Bermudez, V.; Garcia, J. Effect of cleaning Robot’s moving shadow on PV string. Sol. Energy 2023, 254, 1–7. [Google Scholar] [CrossRef]
- Anderson, M.; Grandy, A.; Hastie, J.; Sweezey, A.; Ranky, R.; Mavroidis, C.I.; Markopoulos, Y.P. Robotic device for cleaning photovoltaic panel arrays. In Mobile Robotics: Solutions and Challenges; World Scientific Publishing: Singapore, 2010; pp. 367–377. [Google Scholar]
- Hammoud, M.; Shokr, B.; Assi, A.; Hallal, J.; Khoury, P. Effect of dust cleaning on the enhancement of the power generation of a coastal PV-power plant at Zahrani Lebanon. Sol. Energy 2019, 184, 195–201. [Google Scholar] [CrossRef]
- Solar Panel Array Cleaning Robot. Available online: http://www.washpanel.com/en/prodotti.php (accessed on 31 May 2023).
- Kumar, N.; Sudhakar, K.; Samykano, M.; Sukumaran, S. Dust cleaning robots (DCR) for BIPV and BAPV solar power plants—A conceptual framework and research challenges. Procedia Comput. Sci. 2018, 133, 746–754. [Google Scholar] [CrossRef]
- Ecoppia’s Remote Automatic Solar Panel Cleaning System Reduces O&M Costs | Ecoppia. Available online: https://www.ecoppia.com/solutions (accessed on 31 May 2023).
- GEKKO Solar Hightec Robot. Available online: https://www.serbot.ch/en/solar-panels-cleaning/gekko-solar-robot (accessed on 31 May 2023).
- Sorndach, M.; Pudchuen, N.; Srisungsitthisunti, P. Rooftop Solar Panel Cleaning Robot Using Omni Wheels. In Proceedings of the 2nd International Conference on Engineering Innovation, Bangkok, Thailand, 5–6 July 2018; pp. 7–12. [Google Scholar]
- Fan, S.; Liang, W.; Wang, G.; Zhang, Y.; Cao, S. A novel water-free cleaning robot for dust removal from distributed photovoltaic (PV) in water-scarce areas. Sol. Energy 2022, 241, 553–563. [Google Scholar] [CrossRef]
- Ronnaronglit, N.; Maneerat, N. A cleaning robot for solar panels. In Proceedings of the 5th International Conference on Engineering, Applied Sciences and Technology, Luang Prabang, Laos, 2–5 July 2019; pp. 1–4. [Google Scholar]
- Antonelli, M.; Zobel, P.; Marcellis, A.; Palange, E. Autonomous robot for cleaning photovoltaic panels in desert zones. Mechatronics 2020, 68, 553–563. [Google Scholar] [CrossRef]
- Solar Panel Cleaning Robot. Available online: https://solarcleano.com/en/ (accessed on 31 May 2023).
- pvClean Robot. Available online: https://www.serbot.ch/en/solar-panels-cleaning/pvclean-robot (accessed on 31 May 2023).
- Phan, T.D.; Nguyen, M.D.; Auffray, M.; Le, N.T.; Truong, C.T.; Duong, V.T.; Nguyen, H.H.; Nguyen, T.T. Research Impact of Solar Panel Cleaning Robot on Photovoltaic Panel’s Deflection. arXiv 2023, arXiv:2306.05340. [Google Scholar]
- Mohan, R.; Das, B.; Sundaresan, R. Effect of hardness and surface roughness on slip resistance of rubber. J. Test. Eval. 2015, 43, 1574–1586. [Google Scholar] [CrossRef]
- Chang, W. The effect of surface roughness on the measurement of slip resistance. Int. J. Ind. Ergon. 1999, 24, 299–313. [Google Scholar] [CrossRef]
- Tsai, Y.; Powers, C. Increased shoe sole hardness results in compensatory changes in the utilized coefficient of friction during walking. Gait Posture 2009, 30, 303–306. [Google Scholar] [CrossRef]
- Kim, I. A study on wear development of floor surfaces: Impact on pedestrian walkway slip-resistance performance. Tribol. Int. 2016, 95, 316–323. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Truong, C.T.; Nguyen, V.T.; Duong, V.T.; Nguyen, H.H.; Nguyen, T.T. Research on Adhesive Coefficient of Rubber Wheel Crawler on Wet Tilted Photovoltaic Panel. Appl. Sci. 2022, 12, 6605. [Google Scholar] [CrossRef]
- Hoang, N.A.D.; Truong, C.T.; Nguyen, M.T.; Nguyen, D.A.; Duong, V.T.; Nguyen, H.H.; Nguyen, T.T. Slip Resistance Test Apparatus of Synthetic Rubber Trackpad on Photovoltaic Surface. In Proceedings of the 20th International Conference on Ubiquitous Robots (UR), Honolulu, HI, USA, 25–28 June 2023; pp. 183–190. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | Year | Authors | Description | Advantage | Disadvantage |
|---|---|---|---|---|---|
| Forced air flow of air conditioning systems [9] | 2012 | Assi et al. | The method uses available air conditioning systems in the proposed cleaning PV. | Reduces the PV temperature in addition to PV cleaning. | In areas without air conditioning systems, this method has a fatal limitation. |
| Natural cleaning using rain/wind [10] | 2016 | Tanesab et al. | Natural conditions, which comprise wind, rainfall, etc., are mined to clean dirt from the PV surface. | The accumulation of dust on the PV surface is effectively reduced. | The PV surface is not comprehensively cleaned, which is affected by the environment and area of the solar farm. |
| Manual cleaning [11] | 2011 | Zorrilla-Casanova et al. | The nozzle emits a high-pressure water flow to the PV surface to remove the accumulated dust particles. | Enhances the effectiveness of cleaning and cooling the PV surface. | Implementing this method in water- scarce areas and expansive PV farms could be challenging and costly. |
| Mechanical cleaning (blowing or brushing) [12] | 2017 | Al Shehri et al. | Manpower is the primary determinant in the resourceful removal of dust by using cloths or brushes. | The cleaning quality of PV surfaces is remarkably effective. | The performance of PV systems exhibits disparities across various regions. |
| Mechanical cleaning using PV cleaning robot [13] | 2023 | Le, N.T. et al. | The robot forcefully removes the dust with a combination of water and a brush. | The PV cleaning robot surpasses significantly in both flexibility and cleaning efficiency [8] | The operator is required to possess proficient observation and control skills. |
| Electrical screens [14] | 2011 | Mazumder et al. | The electro-dynamic display enables the automatic and uninterrupted elimination of accumulated dry dust. | Dust particle removal is effective and straightforward. | The conduct of this method necessitates elevated voltage, a converter, a digital signal device, and incurs significant costs in its implementation. |
| Super-hydrophobic aircraft (SHOP) [15] | 2011 | Park et al. | The outer layer, which is a super hydrophobic aircraft, covered the PV surface and made the water not stick to it. | The SHOP method maximizes natural conditions such as rain, dew, etc., and has no requirement for water or human involvement. | The dry environments are unsuitable for the application of this technique. |
| Super water jet (SHIP) [16] | 2011 | Verma et al. | The surface of the water is specially designed to reduce dust accumulation. | This technique proves efficient in breaking down and dissolving dirt. | The SHIP method does not improve the full recovery of PV panel efficiency; the protection layer on the PV surface deteriorates due to ultraviolet radiation. |
| Self-cleaning ultrasonic [17] | 2013 | Vasiljev et al. | High-frequency standard ultrasound (up to 20 kHz) is used to remove some of the dust. | The requirement for water and human involvement in this method is eliminated. | The efficacy is reduced in humid conditions; moreover, the power supply requires dedicated. |
| States | Description |
|---|---|
| Dry (D) | The PV panel surface is kept so that there is no water contamination |
| Wet (W) | The PV panel surface is water contaminated with a water flow of 3 L per minute |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, H.H.; Truong, C.T.; Ngoc, A.D.H.; Nguyen, M.T.; Duong, V.T.; Nguyen, T.T. Investigation of Geometric and Hardness Parameters of Tank Track Grooves Equipped on Photovoltaic Cleaning Robot. Appl. Sci. 2024, 14, 145. https://doi.org/10.3390/app14010145
Nguyen HH, Truong CT, Ngoc ADH, Nguyen MT, Duong VT, Nguyen TT. Investigation of Geometric and Hardness Parameters of Tank Track Grooves Equipped on Photovoltaic Cleaning Robot. Applied Sciences. 2024; 14(1):145. https://doi.org/10.3390/app14010145
Chicago/Turabian StyleNguyen, Huy Hung, Cong Toai Truong, Anh Duy Hoang Ngoc, Minh Tri Nguyen, Van Tu Duong, and Tan Tien Nguyen. 2024. "Investigation of Geometric and Hardness Parameters of Tank Track Grooves Equipped on Photovoltaic Cleaning Robot" Applied Sciences 14, no. 1: 145. https://doi.org/10.3390/app14010145
APA StyleNguyen, H. H., Truong, C. T., Ngoc, A. D. H., Nguyen, M. T., Duong, V. T., & Nguyen, T. T. (2024). Investigation of Geometric and Hardness Parameters of Tank Track Grooves Equipped on Photovoltaic Cleaning Robot. Applied Sciences, 14(1), 145. https://doi.org/10.3390/app14010145