
Research on the Design and Gait Planning of a Hexapod Robot Based on Improved Triangular Gait for Lunar Exploration




Abstract
:1. Introduction
2. Design of the Lunar Exploration Hexapod Robot
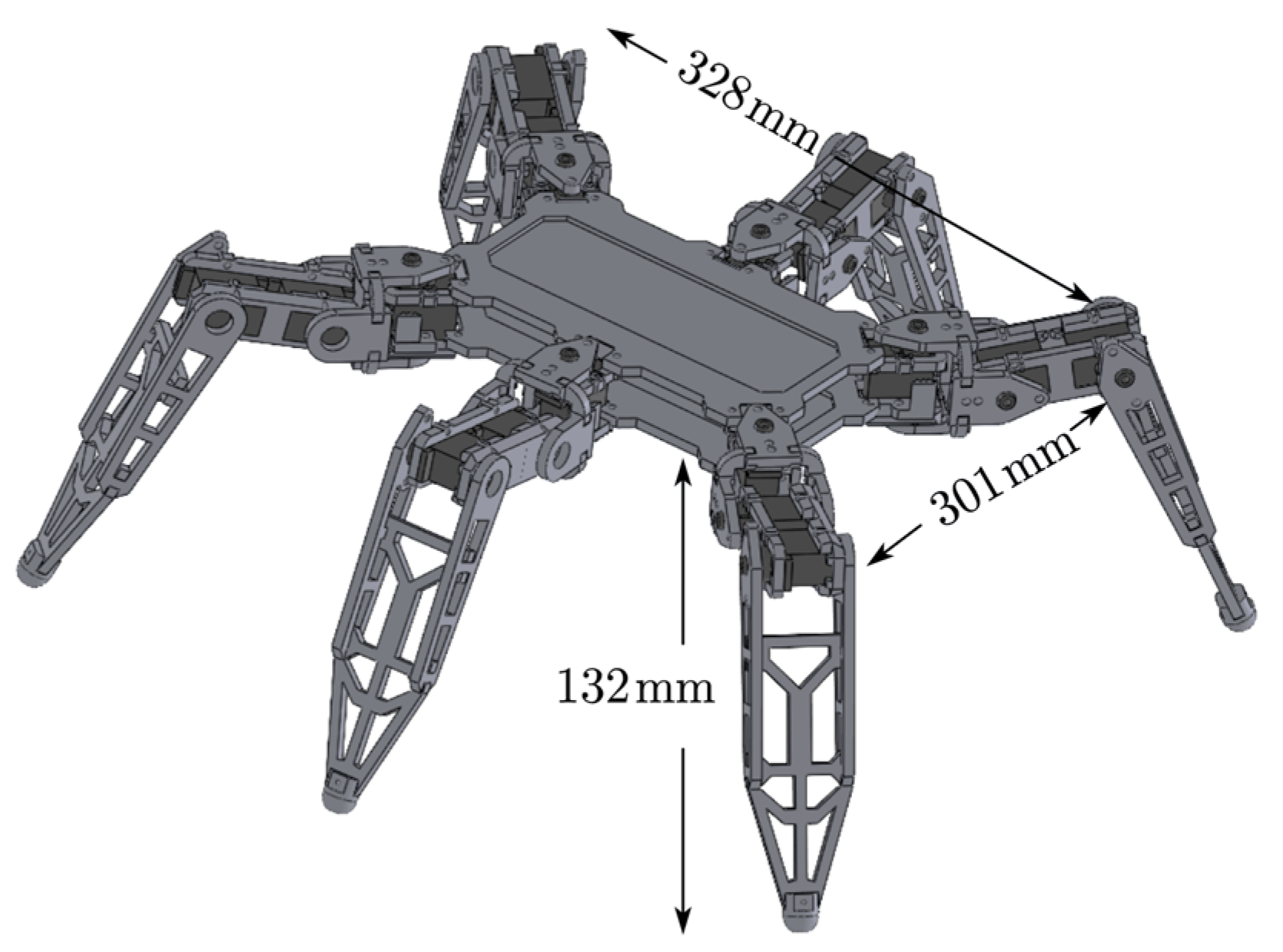
2.1. Overall Scheme Design
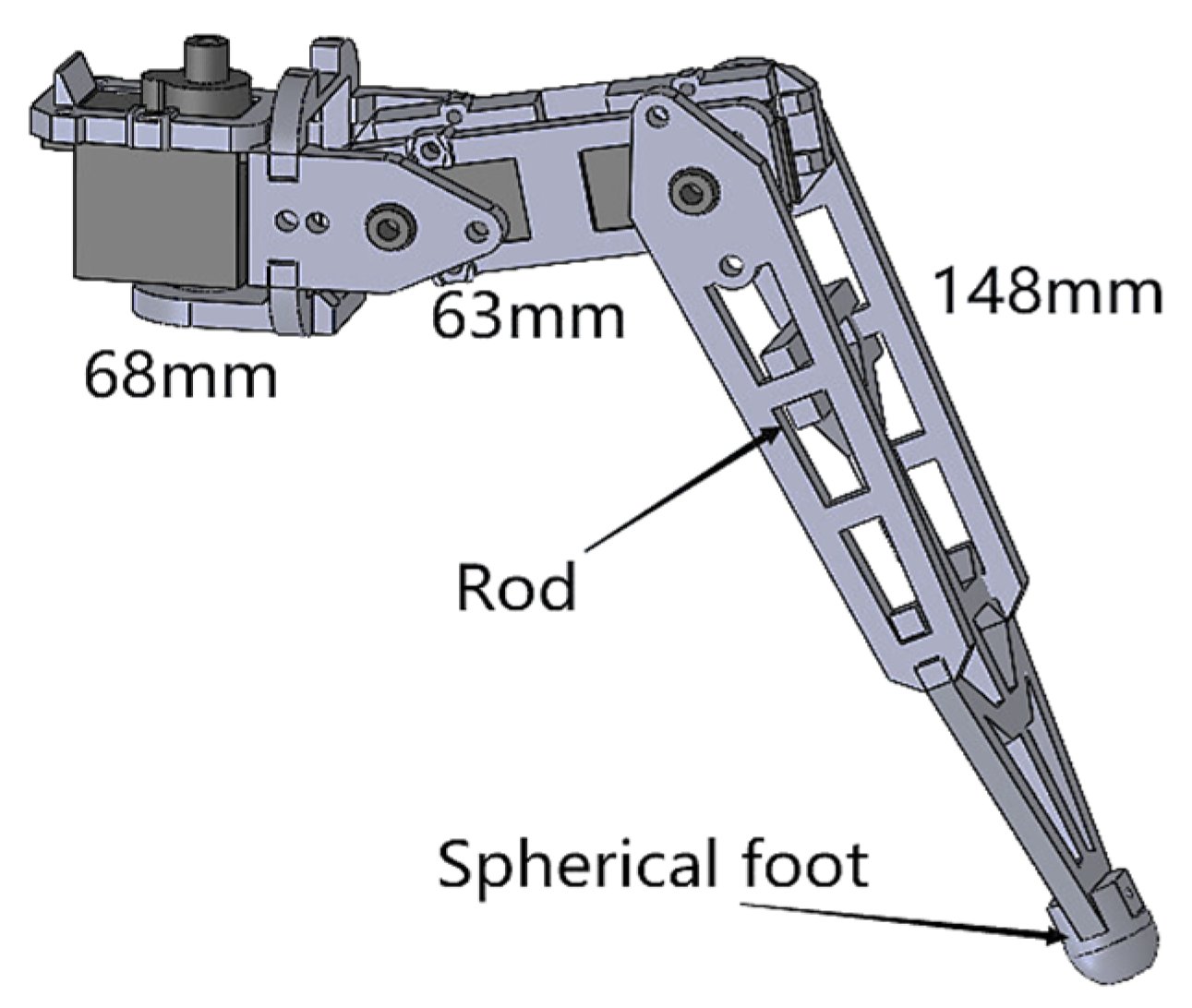
2.2. Structural Design of the Legs of the Lunar Exploration Hexapod Robot
3. Kinematic Analysis of the Lunar Exploration Hexapod Robot
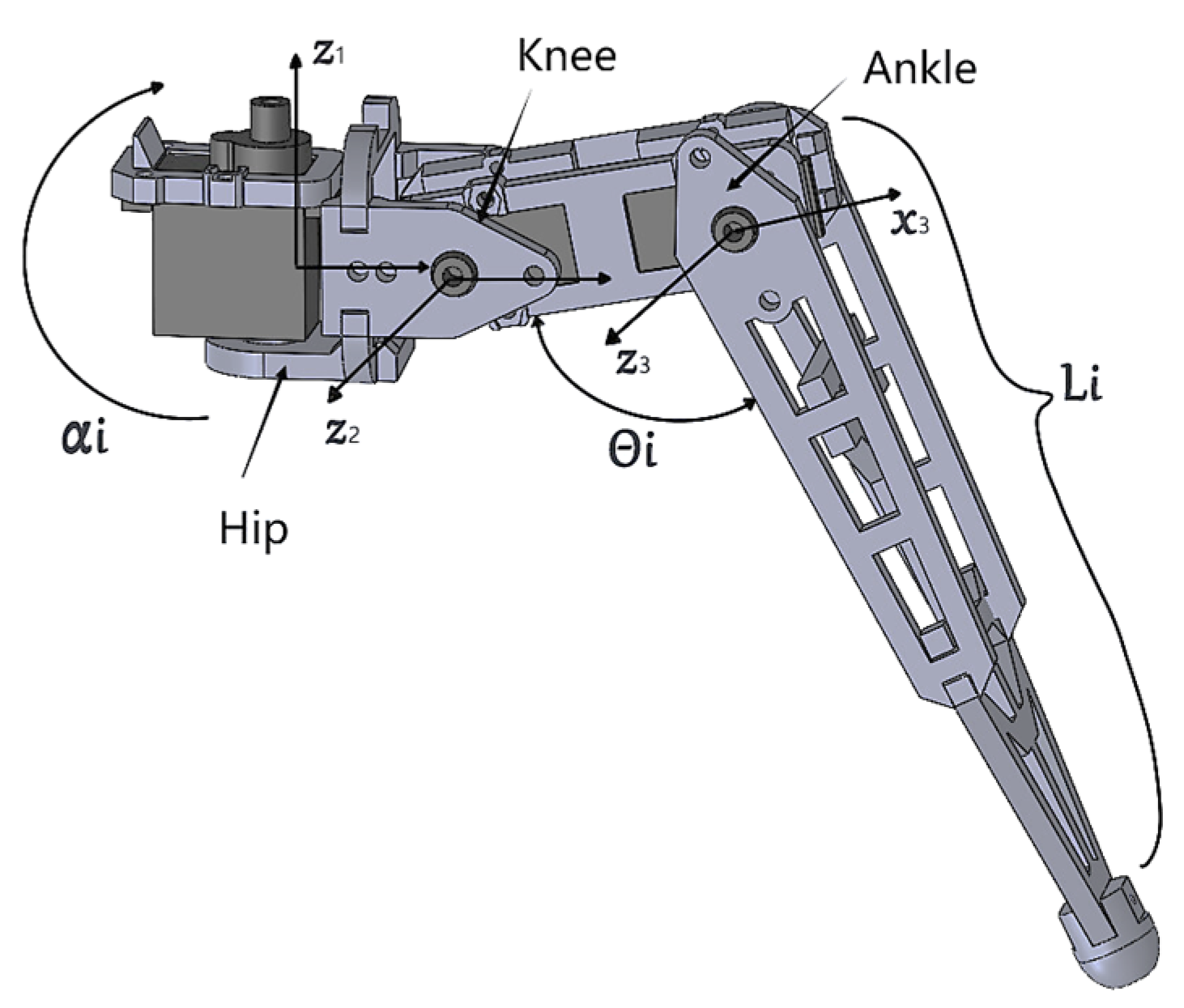
3.1. Analysis of the Spatial Position of the Robotic Legs of the Lunar Exploration Hexapod Robot
3.2. Forward and Reverse Kinematic Analysis of the Lunar Exploration Hexapod Robot
4. Motion Simulation and Experiment of the Lunar Exploration Hexapod Robot
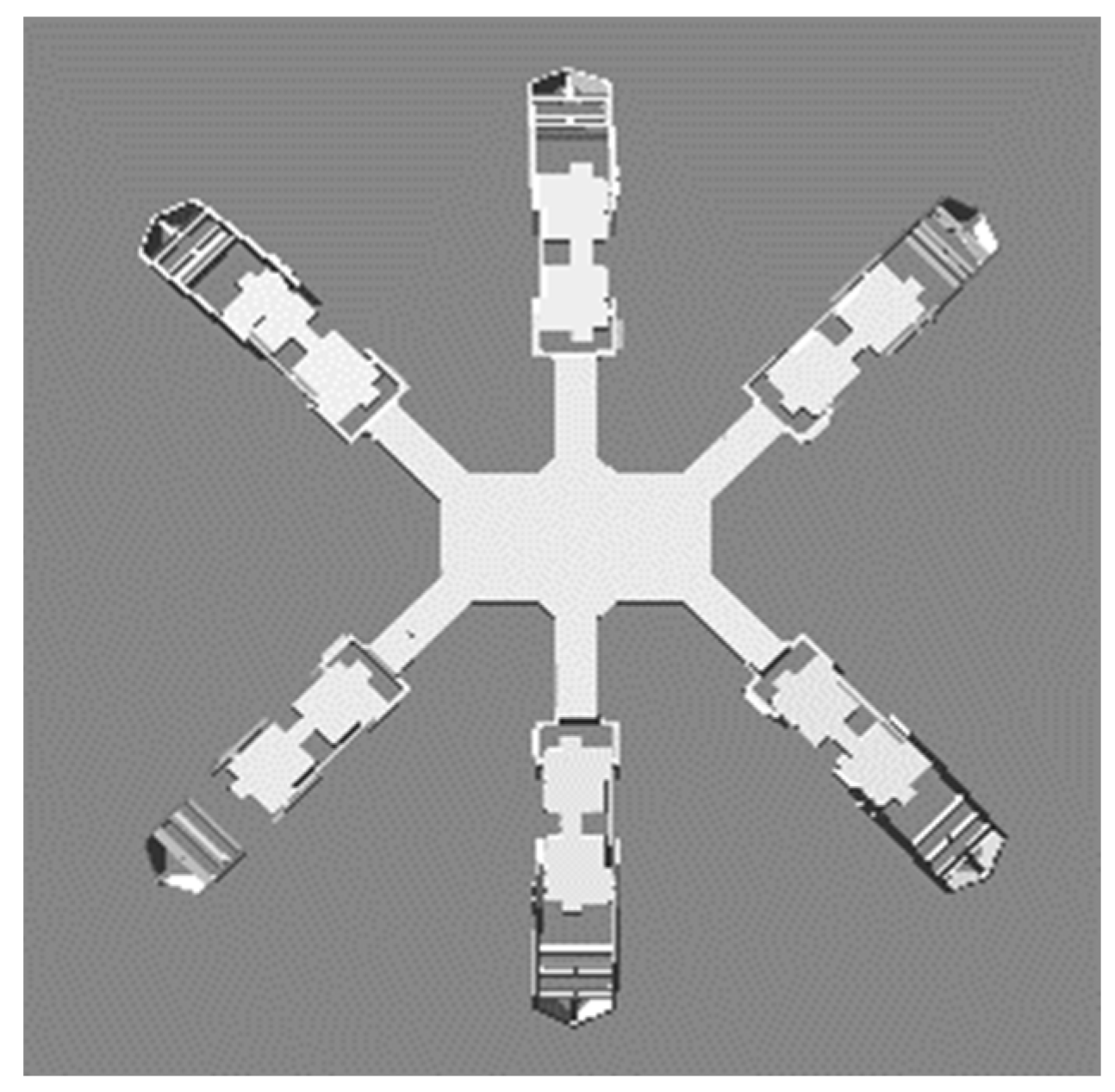
4.1. Establishment of a Robot Simulation Model
4.2. Kinematic Simulation Analysis of the Lunar Exploration Hexapod Robot
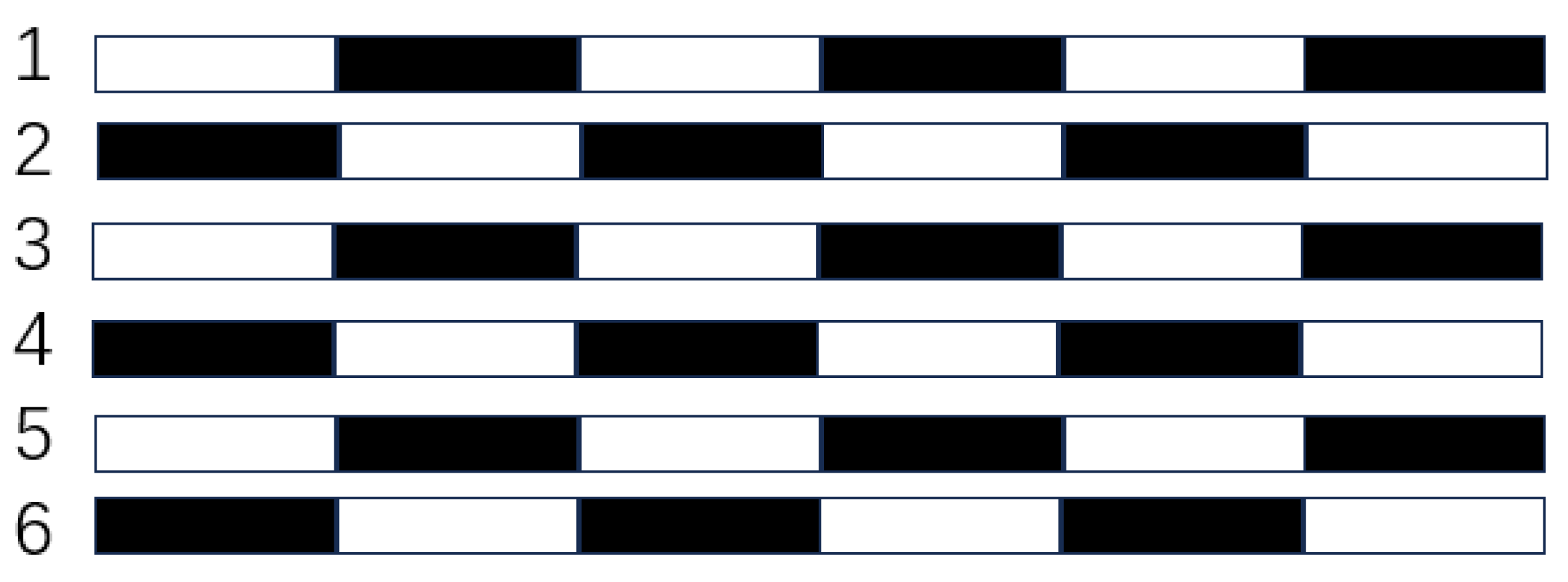
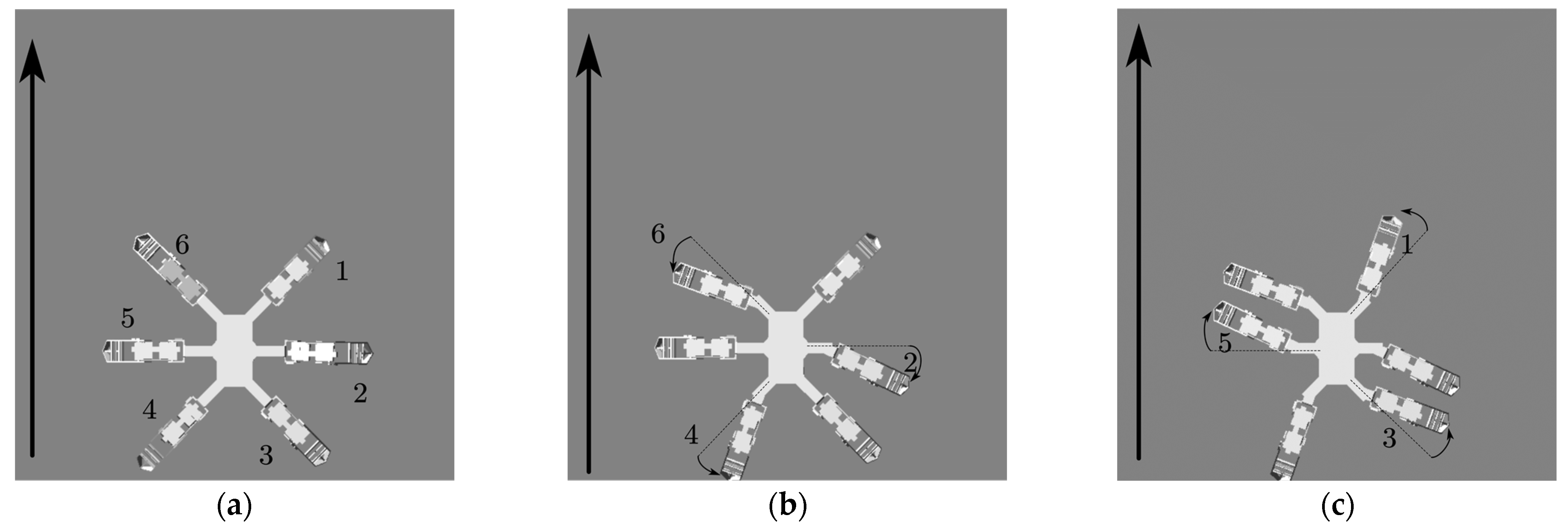
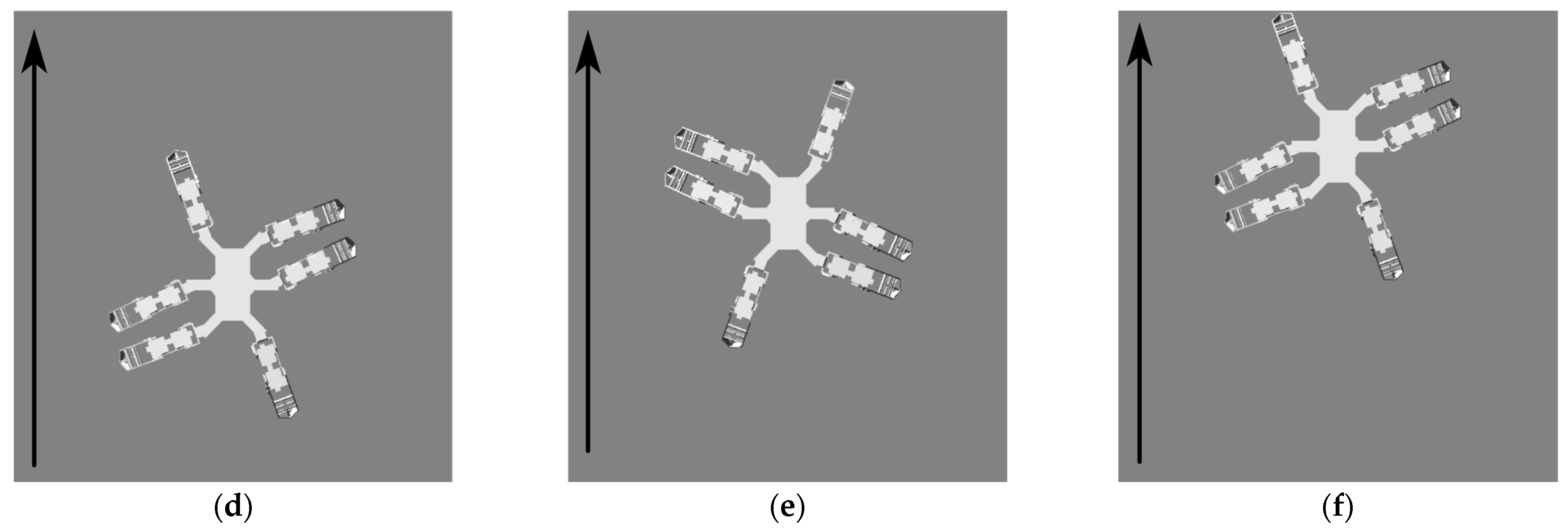
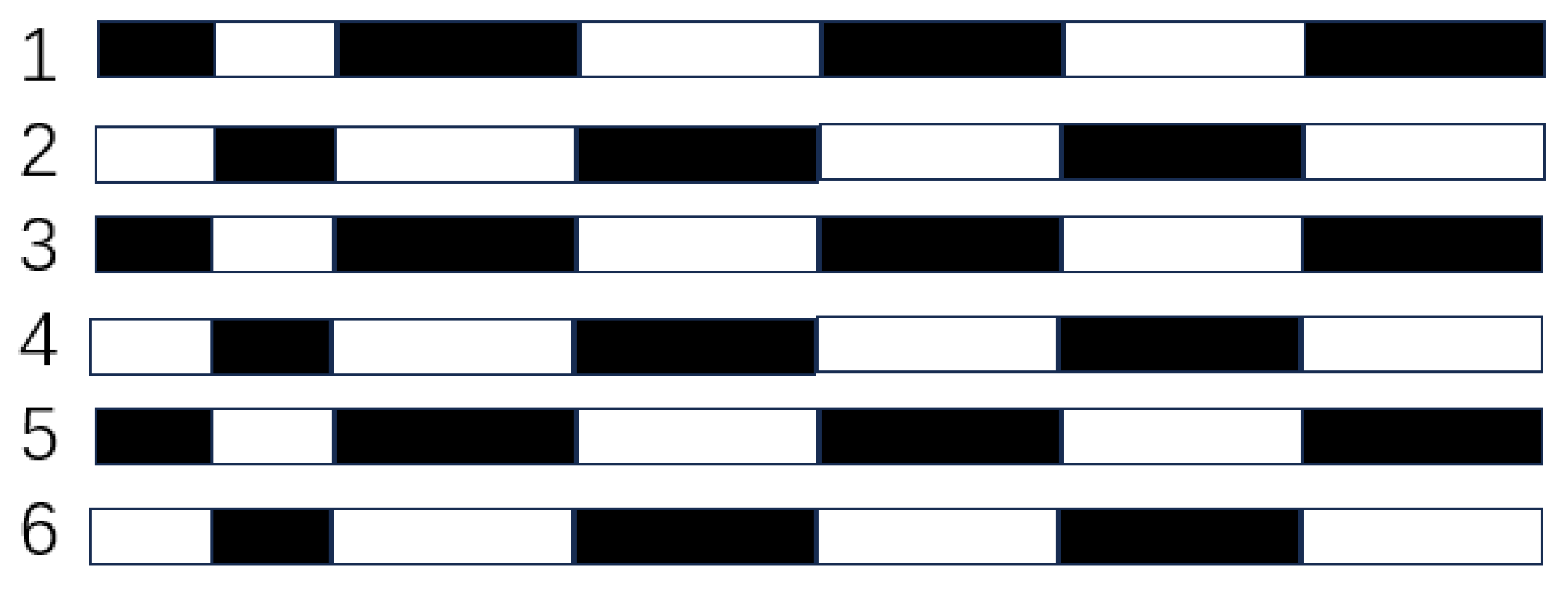
4.2.1. Straight Forward Gait and Inverted Gait Planning
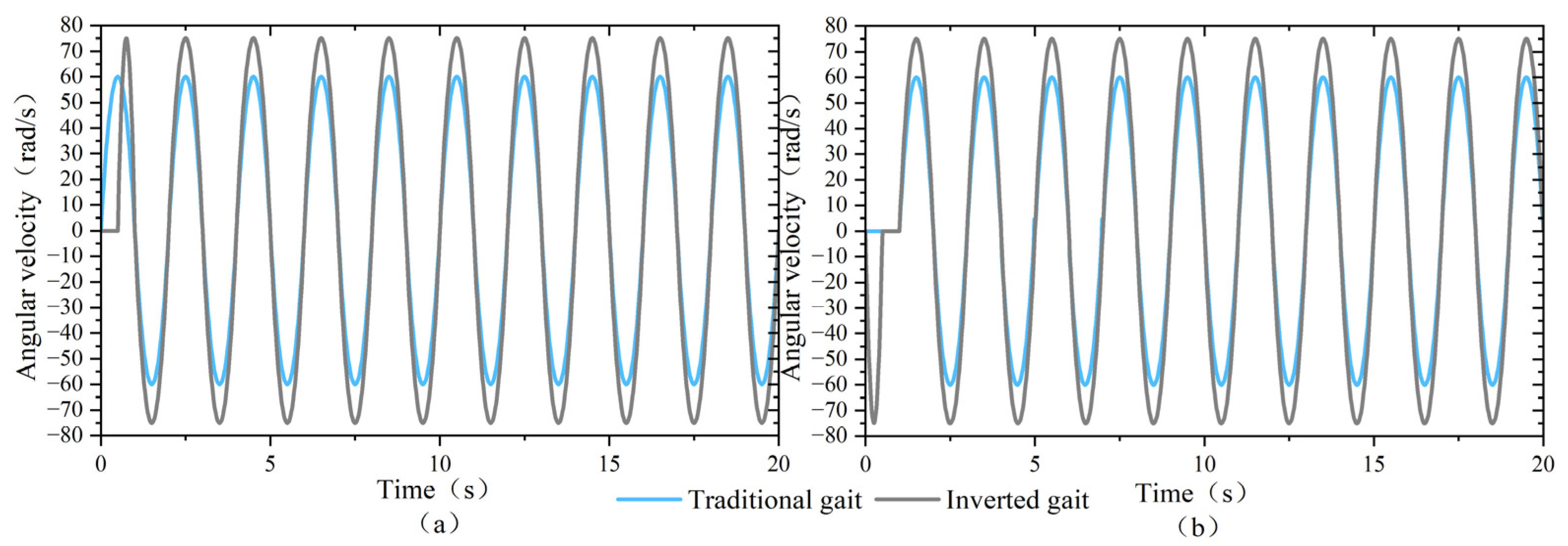
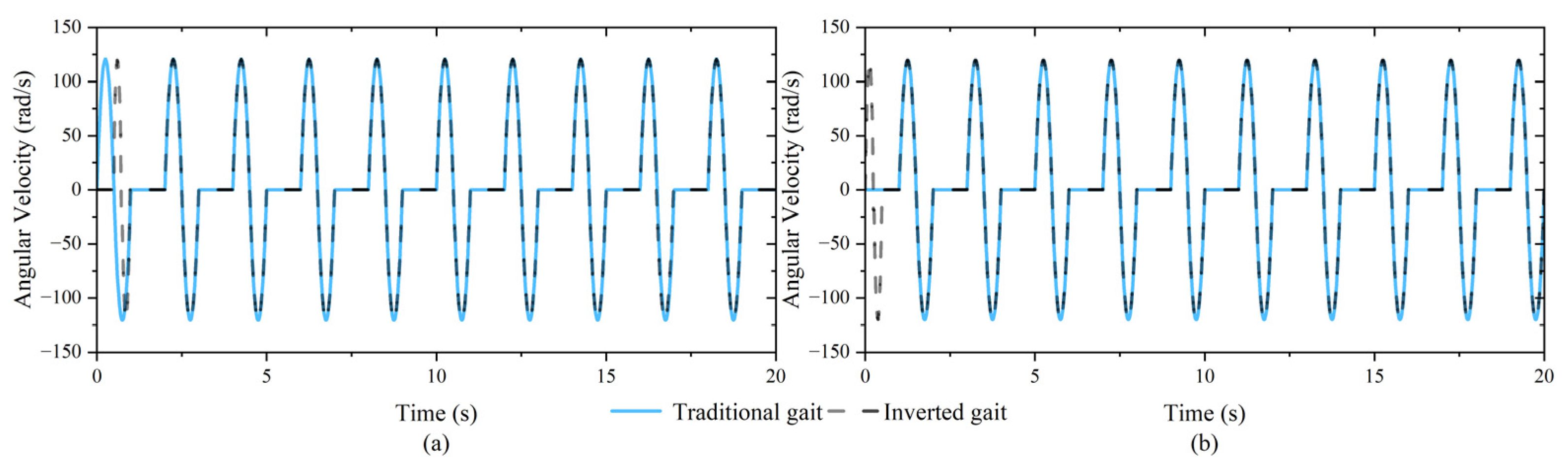
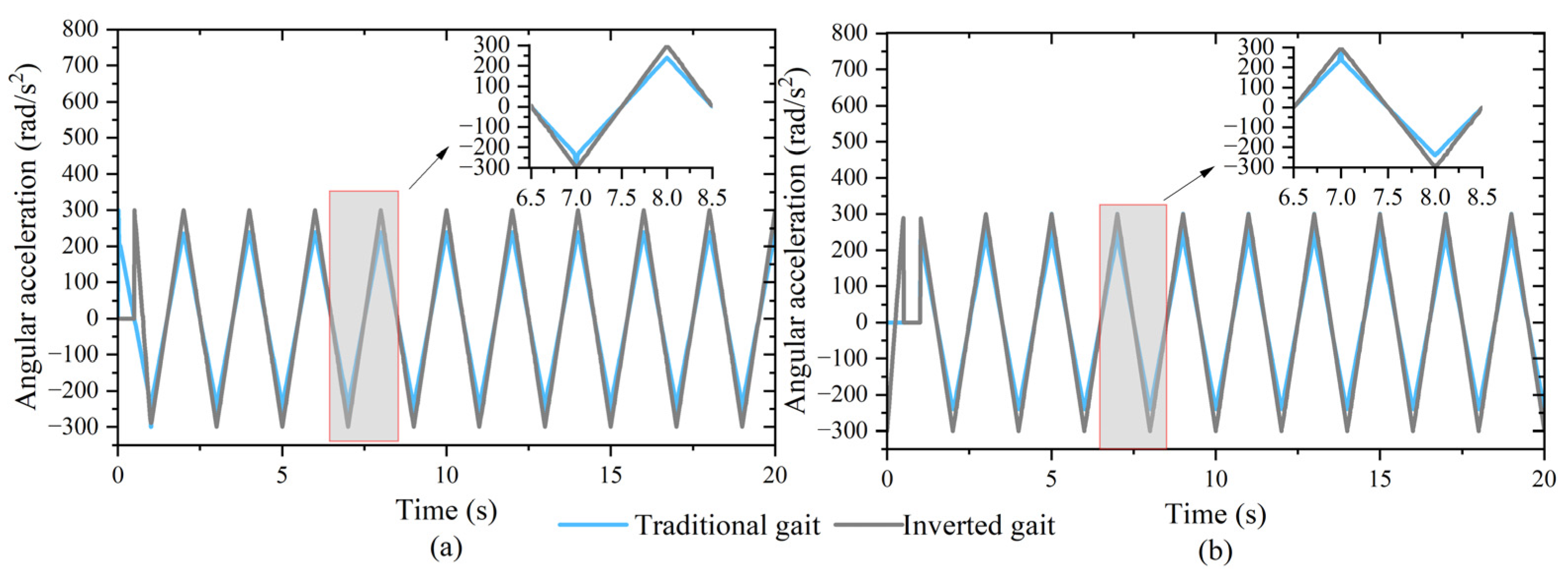
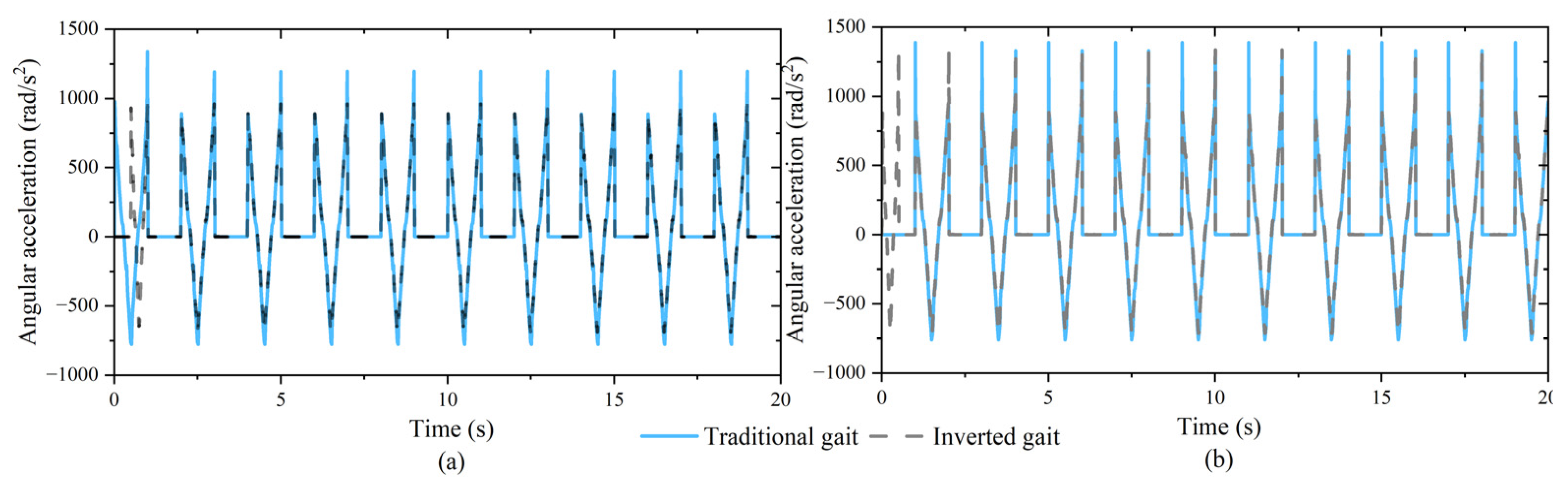
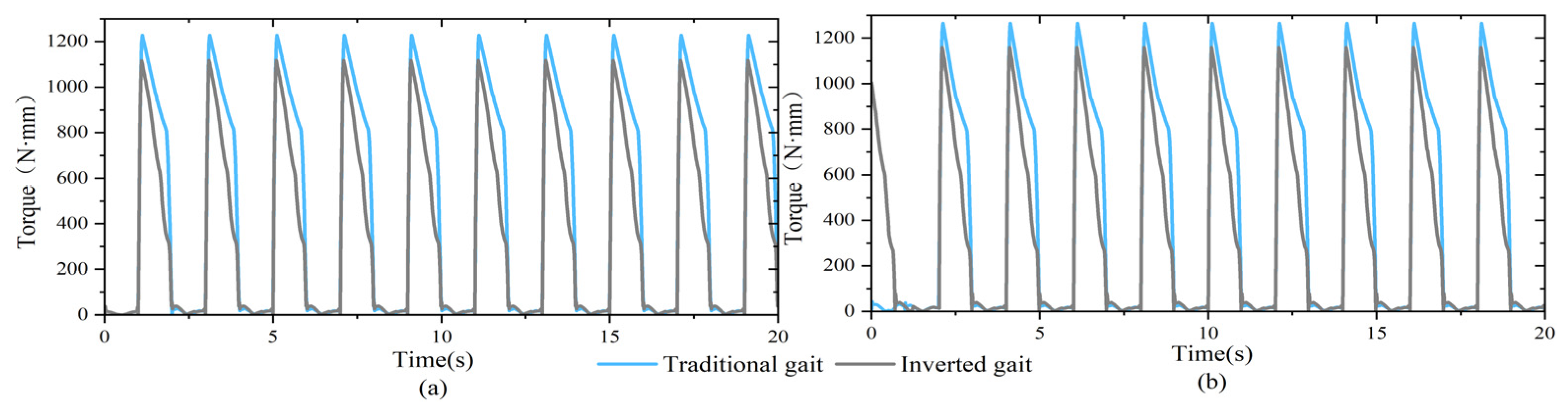
4.2.2. ADAMS Kinematic Simulation Analysis
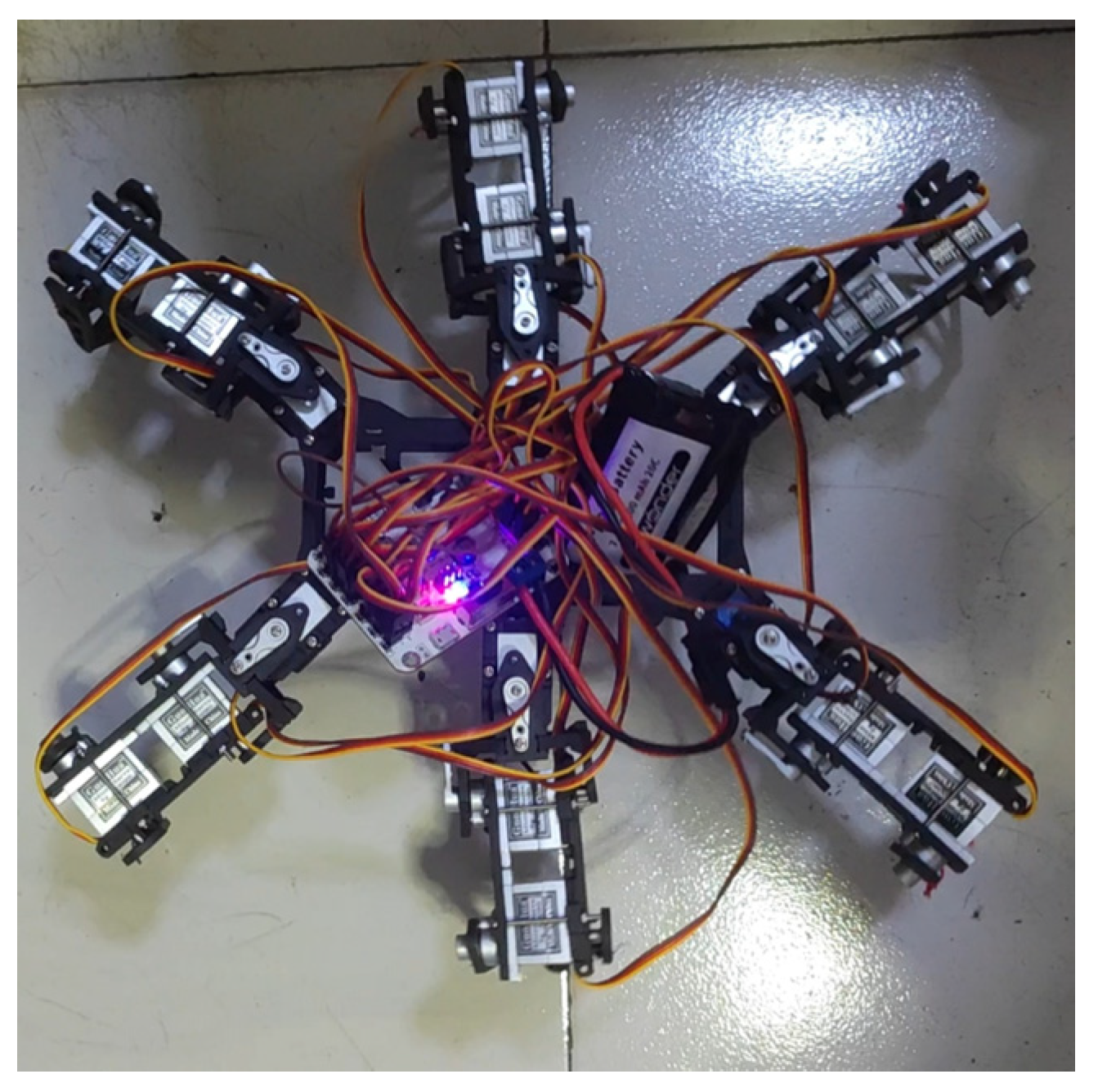
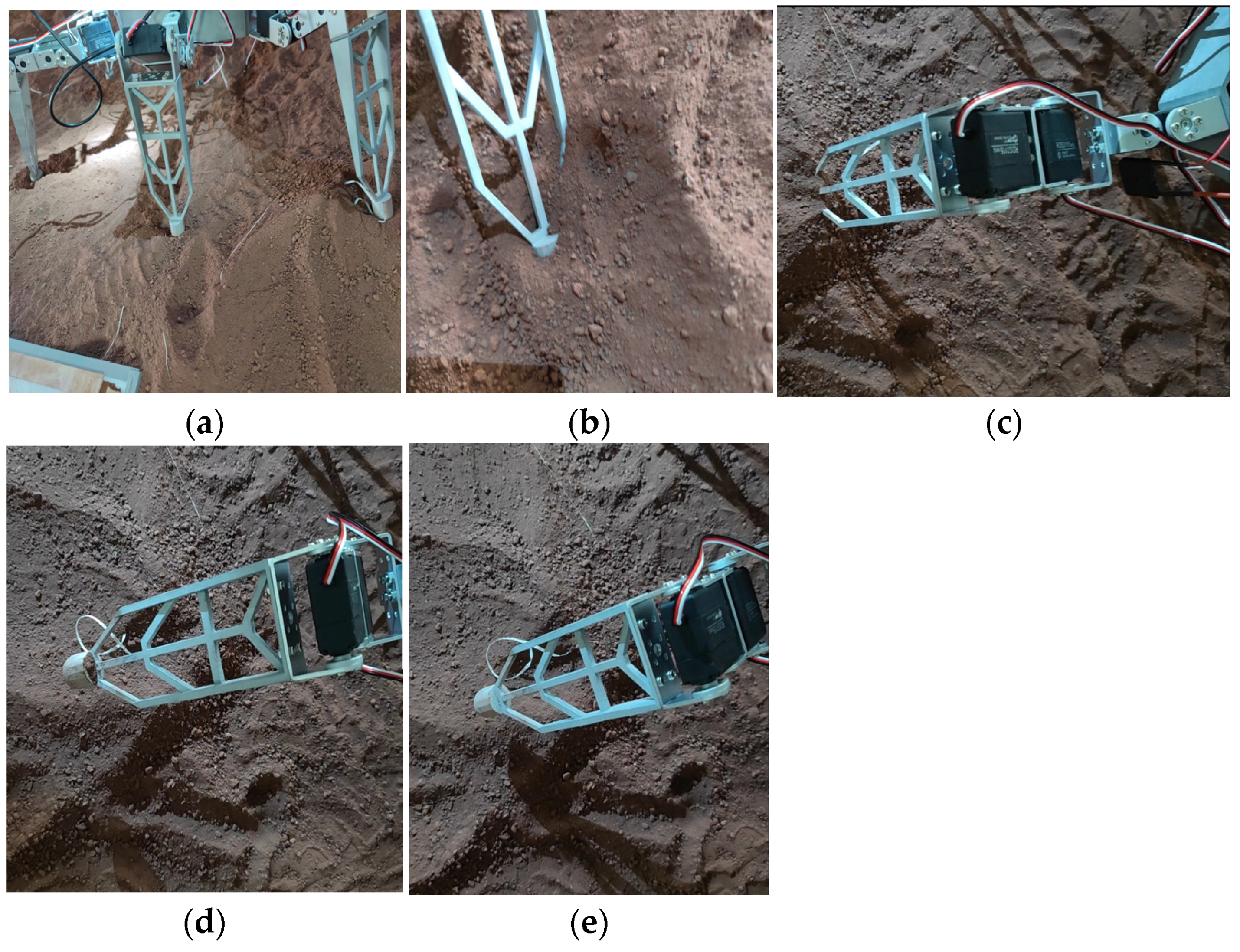
4.3. Robot Prototype Experiment
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wedler, A.; Schuster, M.J.; Müller, M.G.; Vodermayer, B.; Meyer, L.; Giubilato, R.; Vayugundla, M.; Smisek, M.; Dömel, A.; Steidle, F. German Aerospace Center’s Advanced Robotic Technology for Future Lunar Scientific Missions. Philos. Trans. R. Soc. A 2021, 379, 20190574. [Google Scholar] [CrossRef] [PubMed]
- Yang, L.; Li, Y.; Zhang, Y. Numerical Investigation of the Ground-Based Thermal Environment Experimental Approaches to Reveal the Ice-Sublimation Phenomenon inside Lunar Regolith. Acta Astronaut. 2023, 205, 295–309. [Google Scholar] [CrossRef]
- OuYang, Z.Y. International Lunar Exploration Progress and Chinese Lunar Exploration. Bull. Geol. Sci. Technol. 2004, 23, 1–5. [Google Scholar] [CrossRef]
- Solot, E. Improving the Traction of a Legged Rover: A Biomimetic Approach. Master Thesis, Delft University of Technology, Delft, The Netherlands, 2022. [Google Scholar]
- Zheng, Y.C.; OuYang, Z.Y.; Wang, S.J.; Zou, Y.L. Physical and Mechanical Properties of Lunar Regolith. Mineral. Petrol. 2004, 24, 14–19. [Google Scholar] [CrossRef]
- Zhao, Y.T. Time-cost Heuristic Planning Method for Multi-robot Cooperative Lunar Mission. J. Astronaut. 2022, 43, 1277–1290. [Google Scholar] [CrossRef]
- Qin, R.P.; Xu, K.; Chen, J.W.; Han, L.L.; Ding, X.L. Design and Motion Planning of Wheel-legged Hexapod Robot for Planetary Exploration. Acta Aeronaut. Astronaut. Sin. 2021, 42, 154–164. [Google Scholar] [CrossRef]
- Xiong, G.; Guo, X.; Yuan, S.; Xia, M.; Wang, Z. The Mechanical and Structural Properties of Lunar Regolith Simulant Based Geopolymer under Extreme Temperature Environment on the Lunar through Experimental and Simulation Methods. Constr. Build. Mater. 2022, 325, 126679. [Google Scholar] [CrossRef]
- Jiang, S.; Song, W.; Zhou, Z.; Sun, S. Stability Analysis of the Food Delivery Robot with Suspension Damping Structure. Heliyon 2022, 8, e12127. [Google Scholar] [CrossRef]
- Nguyen, H.D.; Dung, V.T.; Sato, H.; Vo-Doan, T.T. Efficient Autonomous Navigation for Terrestrial Insect-Machine Hybrid Systems. Sens. Actuators B Chem. 2023, 376, 132988. [Google Scholar] [CrossRef]
- Jang, W.S.; Huang, W.; Shen, Z.W.; Wang, H.T. Soft Landing Dynamics Simulation for Lunar Explorer. J. Astronaut. 2011, 32, 462–469. [Google Scholar] [CrossRef]
- Hoshino, K.; Igo, N.; Tomida, M.; Kotani, H. Teleoperating System for Manipulating a Moon Exploring Robot on the Earth. Int. J. Autom. Technol. 2017, 11, 433–441. [Google Scholar] [CrossRef]
- Chen, J.; Xie, F.; Huang, L.; Yang, J.; Liu, X.; Shi, J. A Robot Pose Estimation Optimized Visual SLAM Algorithm Based on CO-HDC Instance Segmentation Network for Dynamic Scenes. Remote Sens. 2022, 14, 2114. [Google Scholar] [CrossRef]
- Si, W.; Zhu, Z.; Wu, G.; Zhang, Y.; Chen, Y.; Sha, J. Encoding Manipulation of DNA-Nanoparticle Assembled Nanorobot Using Independently Charged Array Nanopores. Small Methods 2022, 6, 2200318. [Google Scholar] [CrossRef]
- Geng, D.X.; Peng, H.; Zhang, J.T.; Zhao, Y.W.; Wu, G.B. Research on Structure and Kinematics of Hexapod Robot Based on the Pneumatic Flexible Joint. Appl. Mech. Mater. 2013, 401–403, 267–271. [Google Scholar] [CrossRef]
- Luo, X.; Ding, X.J. Research and Prospective of Motion Planning and Control of Ground Mobile Manipulators. J. Harbin Inst. Technol. 2021, 53, 1–15. [Google Scholar] [CrossRef]
- Coelho, J.; Ribeiro, F.; Dias, B.; Lopes, G.; Flores, P. Trends in the Control of Hexapod Robots: A Survey. Robotics 2021, 10, 100. [Google Scholar] [CrossRef]
- Zhu, Y.; Jin, B.; Li, W.; Li, S. Optimal Design of Hexapod Walking Robot Leg Structure Based on Energy Consumption and Workspace. Trans. Can. Soc. Mech. Eng. 2014, 38, 305–317. [Google Scholar] [CrossRef]
- Jahagirdar, N.; Hiremath, A.; Balan, S.; Sathiyanarayanan, M. Enhanced Road Edge Detection (E-RED) for an Autonomous Planetary Rover. In Proceedings of the 3rd International Conference on Applied and Theoretical Computing and Communication Technology (iCATccT), Tumkur, India, 21–23 December 2017; pp. 13–17. [Google Scholar] [CrossRef]
- Xiao, T.Y. Structure Design and Gait Planning of Structure Design and Gait Planning of Heavy-Duty Hexapod Robot. Master’s Thesis, Xihua University, Chengdu, China, 2019. [Google Scholar]
- Fan, J.Z.; Xiao, B.L.; Xu, J.; Shi, L.K. Development and Applications of SiCp/Al Composites in Aerospace Field. Mater. Herald. 2007, 21, 98–101. [Google Scholar] [CrossRef]
- Si, L.; Liu, C.; Yan, H.; Wang, Y.; Yang, Y.; Zhang, S.; Zhang, Y. The Influences of High Temperature on Tribological Properties of Cu-Based Friction Materials with a Friction Phase of SiO2/SiC/Al2O3. AIP Adv. 2021, 11, 025335. [Google Scholar] [CrossRef]
- Chen, J.; Gu, L.; Zhao, W.; Guagliano, M. Simulation of Temperature Distribution and Discharge Crater of SiCp/Al Composites in a Single-Pulsed Arc Discharge. Chin. J. Aeronaut. 2021, 34, 37–46. [Google Scholar] [CrossRef]
- Lordos, G.; Brown, M.J.; Latyshev, K.; Liao, A.; Shah, S.; Meza, C.; Bensche, B.; Cao, C.; Chen, Y.; Miller, A.S. WORMS: Field-Reconfigurable Robots for Extreme Lunar Terrain. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2023; pp. 1–21. [Google Scholar] [CrossRef]
- Yang, C.; Zhang, X.; Bruzzone, L.; Liu, B.; Liu, D.; Ren, X.; Benediktsson, J.A.; Liang, Y.; Yang, B.; Yin, M.; et al. Comprehensive Mapping of Lunar Surface Chemistry by Adding Chang’e-5 Samples with Deep Learning. Nat. Commun. 2023, 14, 7554. [Google Scholar] [CrossRef] [PubMed]
- Ye, P.J.; Xiao, F.G. Issues about Lunar Environment in Lunar Exploration Project. Spacecr. Environ. Eng. 2006, 23, 1–11. [Google Scholar] [CrossRef]
- Zhang, Y.; Qiao, G.; Wan, Q.; Tian, L.; Liu, D. A Novel Double-Layered Central Pattern Generator-Based Motion Controller for the Hexapod Robot. Mathematics 2023, 11, 617. [Google Scholar] [CrossRef]
- Bai, L.; Hu, H.; Chen, X.; Sun, Y.; Ma, C.; Zhong, Y. CPG-Based Gait Generation of the Curved-Leg Hexapod Robot with Smooth Gait Transition. Sensors 2019, 19, 3705. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Fan, X.; Ding, L.; Wang, J.; Liu, T.; Gao, H. Fault-Tolerant Tripod Gait Planning and Verification of a Hexapod Robot. Appl. Sci. 2020, 10, 2959. [Google Scholar] [CrossRef]
- Song, X.; Zhang, X.; Meng, X.; Chen, C.; Huang, D. Gait Optimization of Step Climbing for a Hexapod Robot. J. Field Robot. 2022, 39, 55–68. [Google Scholar] [CrossRef]
- Zhai, S.; Jin, B.; Cheng, Y. Mechanical Design and Gait Optimization of Hydraulic Hexapod Robot Based on Energy Conservation. Appl. Sci. 2020, 10, 3884. [Google Scholar] [CrossRef]
- Zhang, F.; Zhang, S.; Wang, Q.; Yang, Y.; Jin, B. Straight Gait Research of a Small Electric Hexapod Robot. Appl. Sci. 2021, 11, 3714. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | SiCp/Al |
|---|---|
| Density/(g/cm3) | 2.94 |
| Modulus of elasticity/Gpa | 213 |
| Specific modulus/105 m | 72.4 |
| Thermal conductivity/(W·m−1·K−1) | 195.6 |
| Thermal expansion coefficient/106K−1 | 8.0 |
| Tensile strength/Mpa | 363.4 |
| Item | Specification |
|---|---|
| Operating voltage | 5–7.2 V |
| Operating speed (at no load) | 0.13 s/60° |
| Running current (at no load) | 100 mA |
| Stall torque (at locked) | 15 kg∙cm |
| Stall current (at locked) | 1.5 A |
| Idle current | 5 mA |
| Operating frequency | 50–330 Hz |
| Pulse-width range | 500–2500 µs |
| Joint | |||
|---|---|---|---|
| Hip | |||
| Knee | 0 | ||
| Ankle | 0 |
| Parameter | Setpoint |
|---|---|
| Contact Type | entity |
| Stiffness | 100.0 (N.mm) |
| Force Exponent | 2.2 |
| Damping | 10.0 (Ns/mm) |
| Penetration Depth | 0.1 (mm) |
| Coulomb Friction | On |
| Static Coefficient | 0.75 |
| Dynamic Coefficient | 0.75 |
| Station Transition Vel. | 100.0 (mm/s) |
| Friction Transition Vel. | 100.0 (mm/s) |
| Parameter | Setpoint |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.-Q.; Luo, W.-H.; Xu, Z.-D.; Shu, B.-M.; Yang, D.-K. Research on the Design and Gait Planning of a Hexapod Robot Based on Improved Triangular Gait for Lunar Exploration. Appl. Sci. 2024, 14, 260. https://doi.org/10.3390/app14010260
Guo Y-Q, Luo W-H, Xu Z-D, Shu B-M, Yang D-K. Research on the Design and Gait Planning of a Hexapod Robot Based on Improved Triangular Gait for Lunar Exploration. Applied Sciences. 2024; 14(1):260. https://doi.org/10.3390/app14010260
Chicago/Turabian StyleGuo, Ying-Qing, Wen-Hao Luo, Zhao-Dong Xu, Bin-Ming Shu, and Dong-Kai Yang. 2024. "Research on the Design and Gait Planning of a Hexapod Robot Based on Improved Triangular Gait for Lunar Exploration" Applied Sciences 14, no. 1: 260. https://doi.org/10.3390/app14010260
APA StyleGuo, Y.-Q., Luo, W.-H., Xu, Z.-D., Shu, B.-M., & Yang, D.-K. (2024). Research on the Design and Gait Planning of a Hexapod Robot Based on Improved Triangular Gait for Lunar Exploration. Applied Sciences, 14(1), 260. https://doi.org/10.3390/app14010260