Abstract
We examined discrimination accuracy of vibrotactile patterns on the upper forearm using a 2 × 3 array of voice coil actuators to generate 100 Hz vibrotactile stimulation. We evaluated participants’ ability to recognize distinct vibrotactile patterns presented both simultaneously (1000 ms) and sequentially (500 ms with a 450 ms interval). Recognition accuracy was significantly higher for sequential (93.24%) than for simultaneous presentation (26.15%). Patterns using 2–3 actuators were recognized more accurately than those using 4–5 actuators. During sequential presentation, there were primacy and recency effects; accuracy was higher for the initial and final stimulations in a sequence. Over time, participants also demonstrated a learning effect, becoming more adept at recognizing and interpreting vibrotactile patterns. This underscores the potential for skill development and emphasizes the value of training for wearable vibrotactile devices. We discuss the implications of these findings for the design of tactile communication devices and wearable technology.
1. Introduction
Approximately 826 million people worldwide live with some form of vision impairment [1]. Those who are blind or visually impaired largely depend on other senses, like touch and hearing, to navigate and interact with the world. These individuals often face considerable obstacles, especially in education. Their inability to read traditional text can restrict their access to essential information, hindering full participation in society [2]. The Braille tactile writing system addresses this by translating text into patterns of raised dots. These patterns, which individuals can sense with their fingertips, represent letters, numbers, punctuation marks, and other symbols, enabling those with visual impairments to access written information [2].
The use of vibrotactile feedback can improve user performance on touchscreen devices for tasks such as target selection [3], text entry [4], and list item selection [5]. Vibrotactile skin reading is a method of haptic communication where vibrotactile displays are used to transmit information through touch. These displays produce vibration patterns representing various symbols, enabling individuals with visual impairments to interact with digital information. Vibrotactile skin reading is a promising technique for providing information and facilitating communication for visually impaired people, potentially increasing their participation in society [6]. Proposed solutions include wearable displays featuring vibrotactile actuators to augment accessibility [7,8]. These wearable displays can be affixed to various body parts [9,10,11]. For instance, one approach employs three vibration motors on the users’ arms to communicate calendar information, using distinct vibrational patterns for different alerts [9]. Another study demonstrated the use of two vibrotactile wristbands to assist blind individuals during orientation and navigation. These wristbands provide haptic information about the direction and distance to a target [12].
1.1. Can Braille Be Conveyed with Vibrotactile Stimulation?
Traditional Braille reading involves moving one’s hand from left to right across lines of raised dots, primarily utilizing the fingertips. However, vibrotactile displays offer a potentially hands-free Braille reading alternative. Notably, previous studies suggest that blind individuals often possess superior tactile spatial acuity compared to their sighted counterparts, potentially enhancing their capacity to accurately interpret Braille patterns through vibrotactile stimulation [7,8,13,14,15,16].
Vibrotactile displays are emerging as a promising substitute for conventional Braille systems for those with visual impairments. Their appeal lies in their portability, versatility, and capability to represent a vast array of characters and symbols. Notably, designs like the sleeve-based variant that we tested here stimulate passive body areas, keeping hands free for other tasks. The efficacy of these displays is often determined by various factors, such as resolution, thresholds, frequency, amplitude, and stimulus duration [17,18,19,20,21,22,23]. These displays can employ varied vibrotactile stimulation patterns to convey diverse information, from images to navigation instructions [24,25,26]. The intensity and frequency of the vibrotactile stimuli are adjustable, allowing for a large number of possible stimulation combinations.
Our research group has delved deeply into vibrotactile stimulation properties, especially in sensory augmentation devices [7,8,27,28,29,30,31,32,33,34]. One notable system that we have developed is the “The Sound of Vision” sensory substitution platform for the visually impaired. The system uses time-of-flight (ToF) and stereo cameras to survey the surroundings, translating the data into tactile and auditory signals. A unique tactile belt communicates the direction of and distance to potential obstacles using vibrations. The system has yielded promising results in user tests [8].
1.2. Current Study
We evaluated the recognition of Braille-like vibrotactile patterns among sighted observers with a 2 × 3 array of voice coil actuators generating 100 Hz vibrotactile stimulation on the upper forearm. The patterns were categorized into two groups based on the number of actuators needed for their presentation, enabling us to assess the effects of pattern length—short (2–3 actuators) versus long (4–5 actuators)—on their recognition. Furthermore, we examined the potential for learning by observing performance improvement over time.
Our primary objectives were as follows:
- Presentation methods: compare the efficacy of two vibrotactile pattern presentation methods on the forearm—simultaneous and sequential.
- Pattern length influence: determine how varying the pattern length influences the accuracy of pattern recognition.
- Assessing temporal effects: determine whether accuracy improves over time, and what the effect of stimulation order is during sequential presentation.
- Enhance user experience: fine-tune these patterns to maximize user satisfaction and augment haptic feedback experiences.
Our overarching goals align with our broader mission: to advance tactile communication. This objective carries immense potential, from improving accessibility to pioneering novel communication methods. In particular, our efforts can prove crucial for aiding Braille-proficient individuals with visual impairments. Our aim is to improve tactile information conveyance, creating a more inclusive environment for those with sensory challenges.
Ultimately, we aspire to seamlessly integrate wearable technology into the daily routines of those with visual impairments. Through this, we envision expanding new opportunities for learning and interaction, thereby enriching their lives and fostering increasing societal involvement and participation.
This study stands out through the investigation of simultaneous and sequential presentation methods, examining the influence of pattern length on recognition accuracy, and observing temporal effects in the realm of tactile communication and wearable technology. The primary objective is the seamless integration of innovative technology into the daily lives of visually impaired individuals, with a broader vision of fostering increased societal involvement in the future. The unique design of the vibrotactile forearm sleeve propels hands-free Braille communication, ensuring privacy and discretion. Beyond this, the study’s implications extend to enhanced haptic communication, advancements in assistive technologies, and potential applications in virtual/augmented reality, which is particularly beneficial in low-visibility situations.
2. Voice Coil Actuator and Vibrotactile Sleeve
We used voice coil actuators (VCAs; model: Lofelt L5) for generating vibrotactile stimulation. VCAs offer a range of benefits over alternative actuator types. They are known for fast response times, high force density, and low power consumption. Furthermore, they are versatile and can be integrated into various devices and systems. These actuators are designed to deliver rich vibrotactile stimulation and, importantly, allow for the separate manipulation of both frequency and amplitude (details provided in Table 1).

Table 1.
Characteristics of the Lofelt L5 actuator [35].
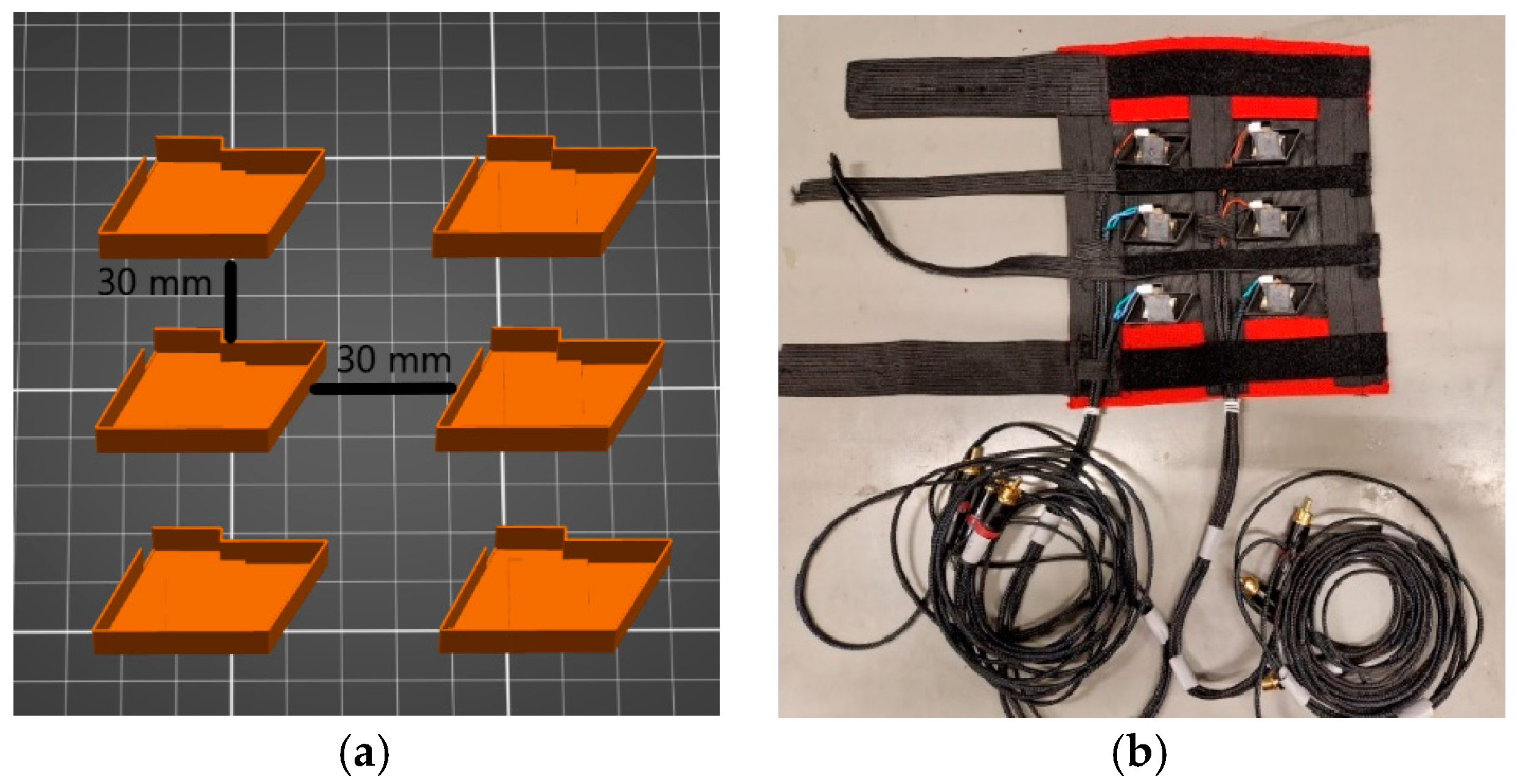
For mounting, the actuators were affixed to a soft and thin fabric, ensuring a snug fit and efficient transfer of tactile information from the actuators to the skin. The six voice coil actuators were arranged longitudinally in a 3 × 2 array to produce back-and-forth vibrational movement perpendicular to the length of the forearm (Figure 1).
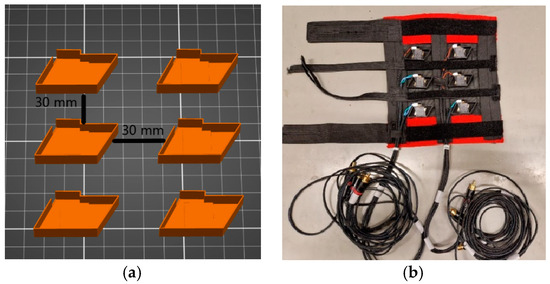
Figure 1.
(a) Overview of the design of the sleeve used to apply the Lofelt L5 actuators along the forearm; (b) an example of a wearable vibrotactile sleeve and the configuration of the actuators.
The experiment utilized a bespoke vibrotactile sleeve crafted from a Power Mesh fabric consisting of 90% nylon and 10% spandex. This choice of materials ensured that the sleeve was both comfortable and user-friendly. To accommodate various forearm sizes, stretch straps equipped with Velcro were used to secure the sleeve, allowing easy adjustment for individual participants. The L5 actuator enclosures were 3D-printed directly onto the fabric, ensuring that the actuators could vibrate without any hindrance. The printing was executed using a Prusa MK3s 3D printer and Prusa Slicer, with PLA as the chosen material. Importantly, there were no fabric layers obstructing the point of contact between the enclosure and the skin.
The L5 actuators had dimensions of W: 17.0 × D: 20.5 × H: 6.2 mm. The custom-made enclosures were slightly larger, measuring W: 17.0 × D: 28 × H: 6.2 mm. One significant advantage of this enclosure design is its protective quality, safeguarding both the participants’ skin and the elastic material from potential abrasion or damage inflicted by the moving actuator. Within the enclosure, the actuator was oriented so that it produced vibrations parallel to the skin and perpendicular to the forearm’s length.
The enclosure was vital for delivering vibrotactile stimulation safely. Its tight fit with the actuator ensured that it functioned seamlessly as a single unit. With a smooth surface, the enclosure was lightweight and thin, at an approximate thickness of 1.6 mm.
For stimulus presentation, the system included a digital audio interface (RME MADI face XT), digital-to-analog converters (Ferrofish A32), multi-channel amplifiers, and the Lofelt L5 voice coil actuators. The tactile sleeve interfaced with the audio hardware through wired connections.
3. Methods
3.1. Participants
Eight normally sighted people, ranging in age from 21 to 38 years (mean age: 29 years), participated in this study. All participants confirmed they had no known issues with vibrotactile stimulation. Before beginning the experiment, each participant provided their written informed consent. The study was conducted in alignment with the guidelines set by the local ethical committee and the Declaration of Helsinki.
3.2. Mapping Patterns to Vibrotactile Cues
Our primary aim was to assess the accuracy with which sighted participants could identify vibrotactile patterns on their skin with simultaneous versus sequential presentations. Additionally, we sought to understand how the length of these patterns (i.e., the number of activations participants needed to discern) influenced their recognition capabilities. The aim of this research is to lay a foundation for the future development of a wearable device that can present Braille-like patterns through vibrotactile stimulation.
We used a set of 14 unique patterns derived from the Icelandic Braille alphabet. These patterns were divided into 2 categories: short-length patterns, which involved the use of 2–3 actuators, and long-length patterns, requiring 4–5 actuators. The specifics of these patterns can be observed in Figure 2 and are detailed further in Table 2.
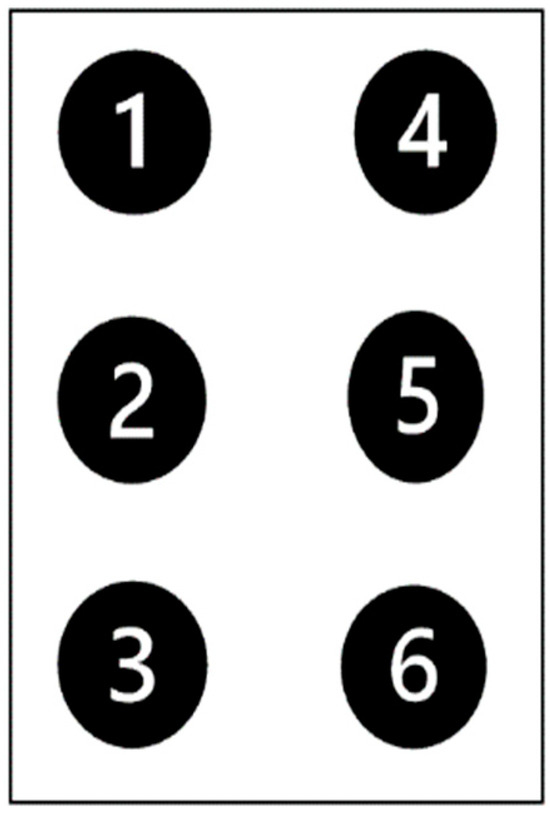
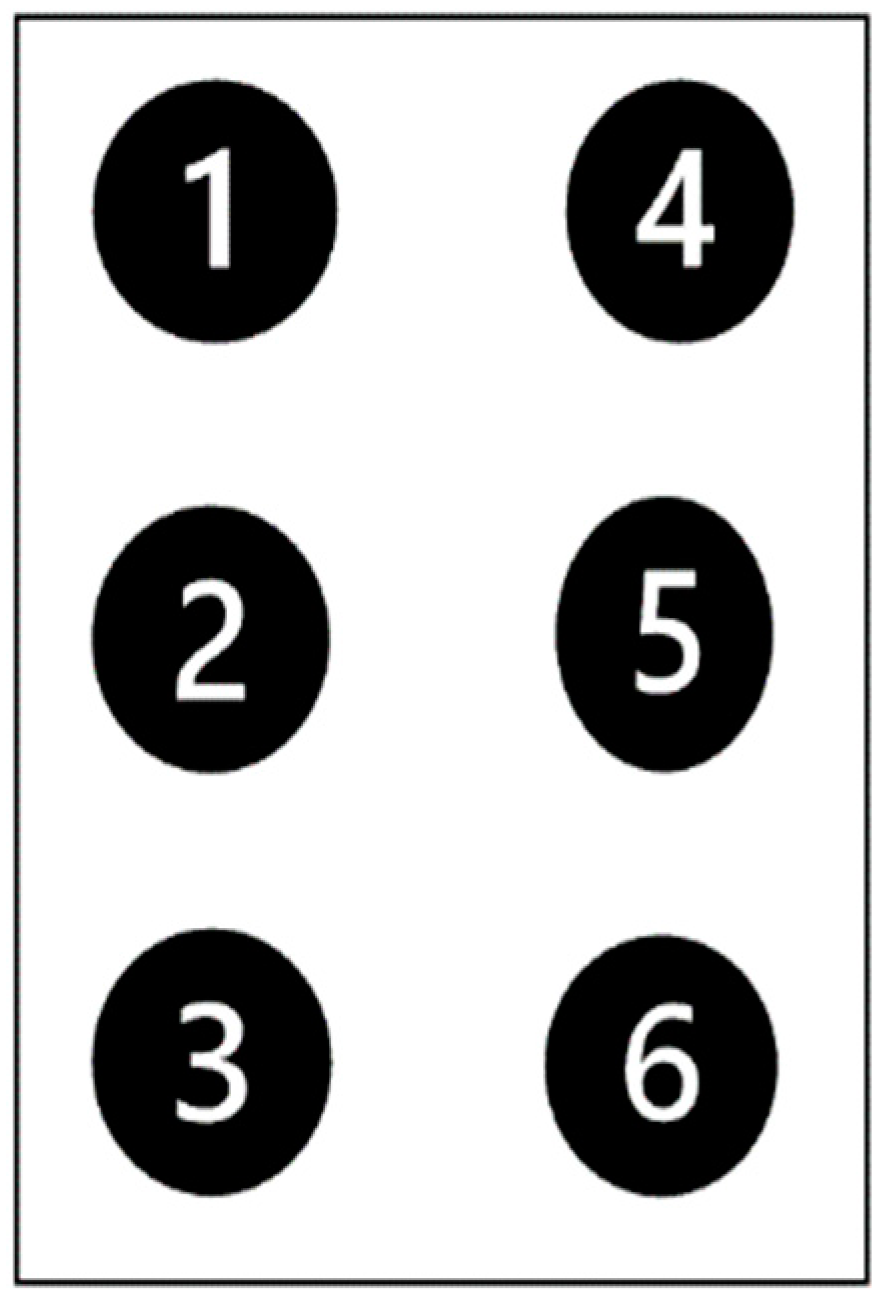
Figure 2.
Assignment of pattern dots to the six actuators in this study.
Table 2.
The patterns used in the experiment and the numbers of the actuators required to present each of the 14 vibrotactile patterns.
It is important to emphasize that our study did not require participants to have any prior knowledge of Braille reading or recognition of specific Braille characters. Instead, we aimed to assess their capability to accurately reproduce the vibrotactile patterns using a keyboard interface. This design allowed us to evaluate the efficacy of our vibrotactile system purely based on participants’ ability to discern and reproduce the patterns they felt on a keypad.
There were a total of 168 trials in the study, divided into 24 miniblocks (each containing 7 trials): 12 miniblocks for short patterns and 12 for long patterns. Within each block, there were 28 trials. Half of these miniblocks involved simultaneous presentation, while the other half involved sequential presentation. Every trial began with the presentation of a pattern, and subsequently, participants were tasked with reproducing the pattern using a keypad. The order of presentation was randomized (details in Table 2).
Table 2 elucidates the characters, corresponding patterns, and the actuators used for each pattern.
For simultaneous presentation, all actuators were activated simultaneously for 1000 ms. A 4000 ms interval followed, during which participants responded. During sequential presentation, each actuator was triggered successively for 500 ms, separated by a 450 ms pause. As for simultaneous presentation, there was a 4000 ms response interval.
The stimulation was set at a constant frequency (100 Hz) and amplitude (9.6 g acceleration). Notably, this frequency aligns with the optimal detection range for human vibrotactile perception (based on our previous studies [36]). The entire experiment took approximately 35 min. for each participant.
3.3. Familiarization Session
Prior to the main experiment, participants were thoroughly briefed on the procedure and the tactile stimulation. To familiarize participants with the actuators’ stimulation, they were activated six times in quick succession. To ensure that the participants fully understood their expected task, a block of 28 trials was administered.
Participants used a keypad to reproduce the stimulation pattern on each trial, with each key corresponding to one of the 6 stimulation locations. These practice trials ensured that participants were adequately prepared and had a firm understanding of their task before the main experiment started.
3.4. General Procedure
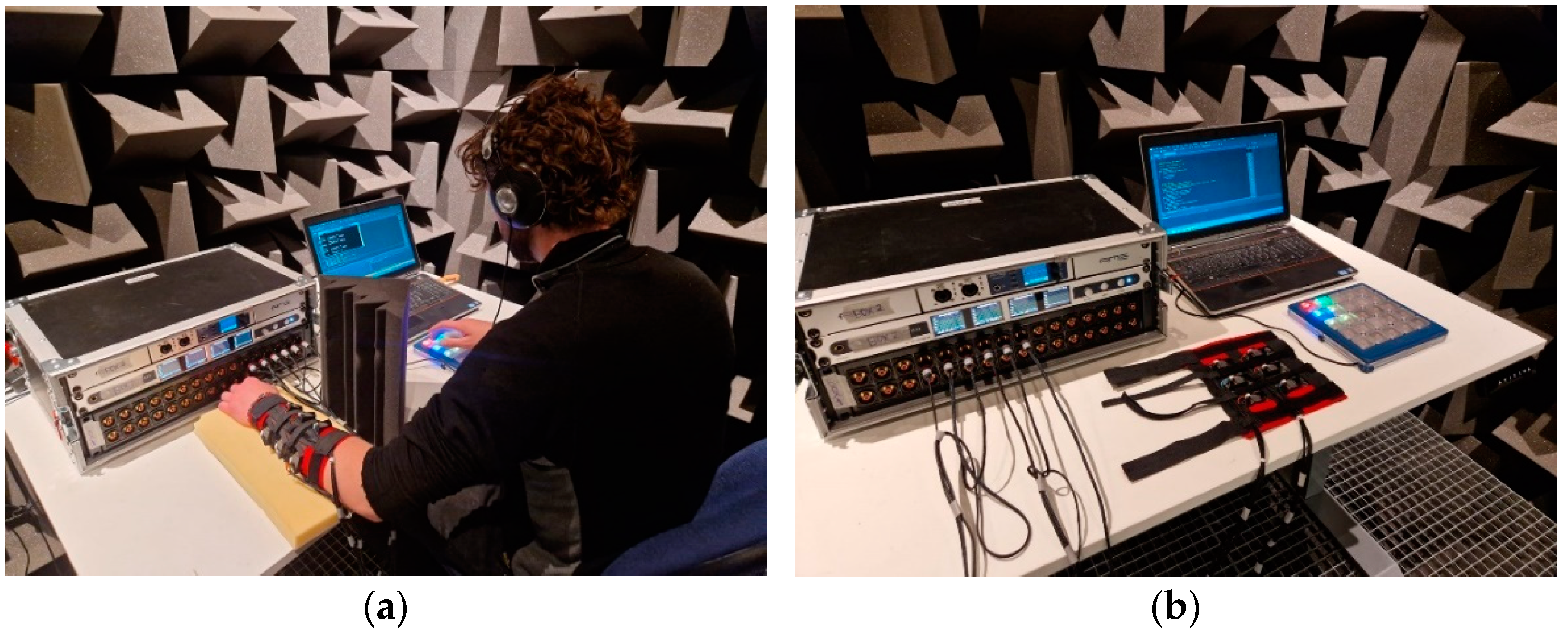
To minimize external distractions, the study was conducted in an anechoic chamber. To prevent any potential auditory cueing, like from the subtle noise from the actuators, white noise was played through headphones (see Figure 3a,b). Before gathering data, we calibrated the intensity of the vibrotactile stimulation using acceleration measurements. A three-axis accelerometer (Brüel & Kjær Type 4520, Denmark, Virum) gauged the acceleration and intensity of the vibration. This meticulous calibration was performed for every participant to eliminate potential biases and ensure uniformity and guarantee that each participant received the same tactile frequency (100 Hz) and amplitude (9.6 g) on their skin throughout the experiment.
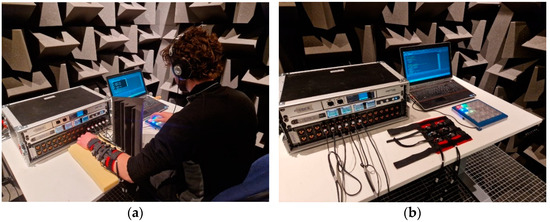
Figure 3.
(a) A participant in the anechoic chamber wearing a vibrotactile sleeve, with his hand resting on a cushion. The participants wore headphones playing white noise to block out external auditory cues and responded to the vibrotactile feedback by pressing the correct keys on the keypad. (b) The audio hardware consisted of a digital audio interface (RME MADI face XT), digital-to-analog converters (Ferrofish A32), multi-channel amplifiers, and parallel vibrating voice coil actuators (Lofelt L5), t L5). The MADI face XT receives information from a computer via a USB cable and sends the signal to the Ferrofish A32 Analog-to-Digital/Digital-to-Analog (AD/DA) converter. Ferrofish A32 then conveys the signal to the amplifier, which then sends the amplified signal to the actuators.
Notably, we performed force measurements at the contact surface between the enclosures and the forearm skin using a Force-Sensitive Resistor (FSR), specifically the FSR03 series, from Ohmite Manufacturing Company, Warrenville, IL, USA. The force was adjusted to be 1.64 N for all participants.
The experiment consisted of six blocks of tactile patterns, each involving four miniblocks presented in a randomized order—either sequentially or simultaneously. Each miniblock featured seven random patterns, and during the response interval, participants were tasked with replicating the presented pattern on a keypad.
4. Results
A repeated measures ANOVA was conducted to examine the effects of the presentation mode (simultaneous or sequential) and the length of the patterns (short or long) on the accuracy of vibrotactile pattern reproduction. The results showed that both the presentation mode (F (1, 20) = 1033; p = 1.07 × 10−18) and the length of patterns (F (1, 20) = 53.6; p = 4.41 × 10−7) had a significant effect on accuracy. Accuracy was significantly higher with sequential presentation than simultaneous, and performance was better for short vibrotactile patterns than long ones. Additionally, there was a significant interaction between these two factors (F (1, 20) = 12.4; p = 0.02; p < 0.05), indicating that the effect of pattern length on accuracy differed depending on the presentation method.
We defined ‘accuracy’ as the participant’s ability to correctly recognize and report the vibrotactile patterns applied to the skin of their forearm. For sequential activation, a ‘correct response’ meant that participants accurately identified and reported all the activations in the presented sequence and, importantly, maintained their correct order. The order in which they reported the dots was therefore critical for accuracy. In contrast, for simultaneous presentation, a ‘correct response’ was determined by participants’ accurate identification of the numbered actuators in the pattern. The order in which participants reported the vibrations therefore did not affect accuracy.
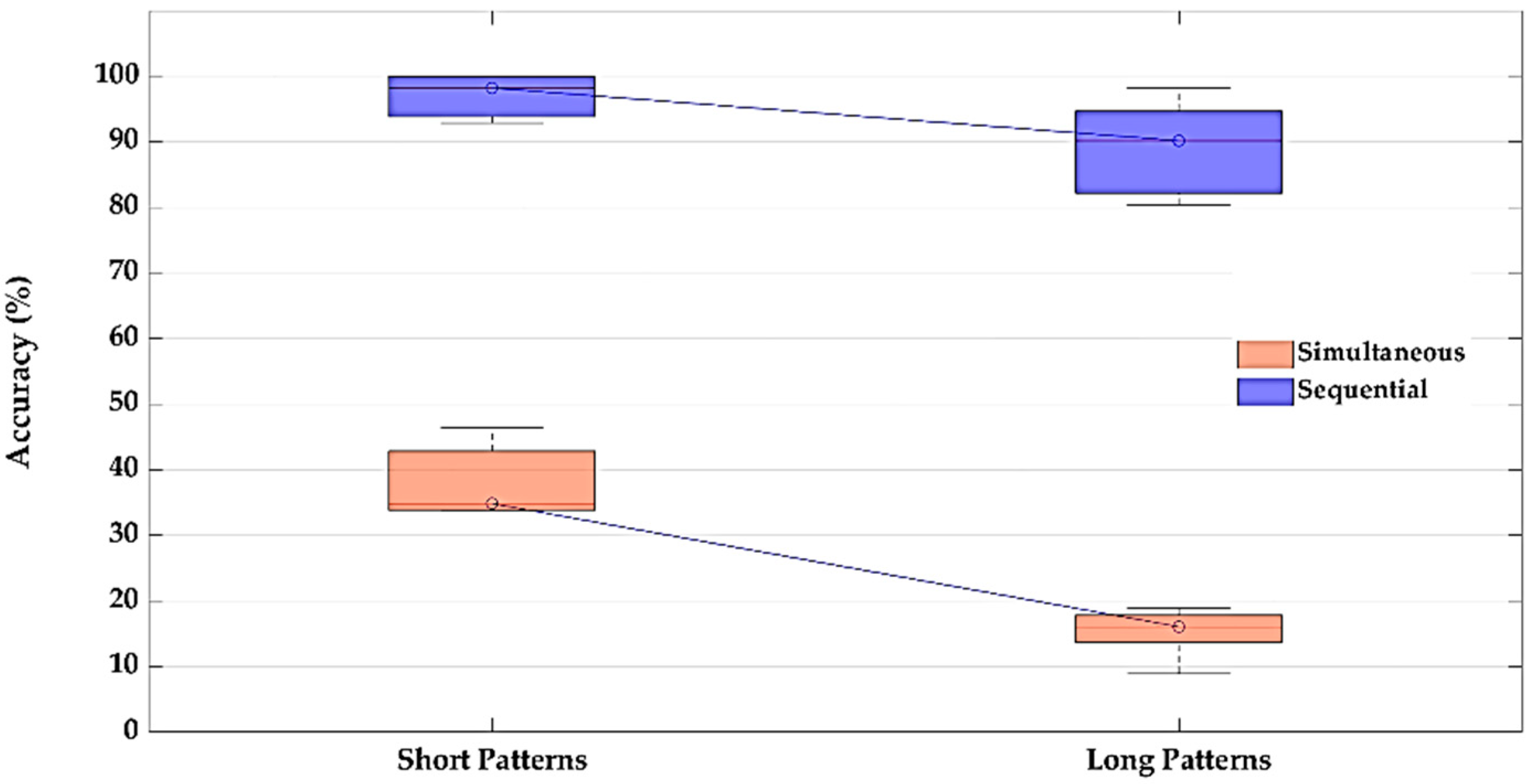
The data in Figure 4 reveal that the detrimental effect of simultaneous presentation was larger for the long patterns than the short ones. Overall, these findings suggest that the presentation method has a large effect on the accuracy of vibrotactile pattern recognition. In addition, there was a large effect of the pattern length (short versus long).
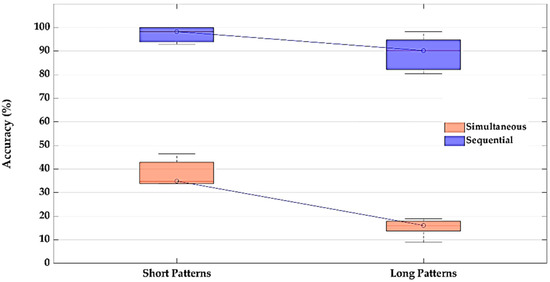
Figure 4.
Box–whisker plot comparing the accuracy (y-axis) between the two different pattern lengths (short- and long-length patterns) with different vibrotactile presentation methods (x-axis): the graph shows the average accuracy in percentages on the upper side of the forearm for sequential (blue) and simultaneous presentations (orange). The box length shows the interquartile range (IQR) and the 25% and the 75% limits, and the horizontal bar inside the box shows the median value. The ends of the box plot represent minimum and maximum values.
The box plots (Figure 4) show how the median accuracy was highest for sequential presentation for both short (97.19%) and long patterns (89.29%). The most notable result is that presenting vibrotactile patterns sequentially was vastly more effective for accuracy for both short and long patterns. Another important result is that accuracy during simultaneous presentation was much lower for long patterns (15.28%) than short ones (37.80%).
4.1. Vibrotactile Pattern Length
Short-length patterns were recognized with considerably higher accuracy than longer patterns. This implies that pattern length plays a crucial role in the accurate recognition of vibrotactile patterns on the skin. Longer patterns, due to their increased complexity, might challenge participants’ ability to discern and interpret them accurately. In contrast, shorter patterns are more easily grasped, leading to better recognition accuracy (Figure 4). Note that this difference between short and long patterns may additionally reflect differences in demands on working memory and increased complexity for responding.
4.2. Simultaneous Versus Sequential Presentation
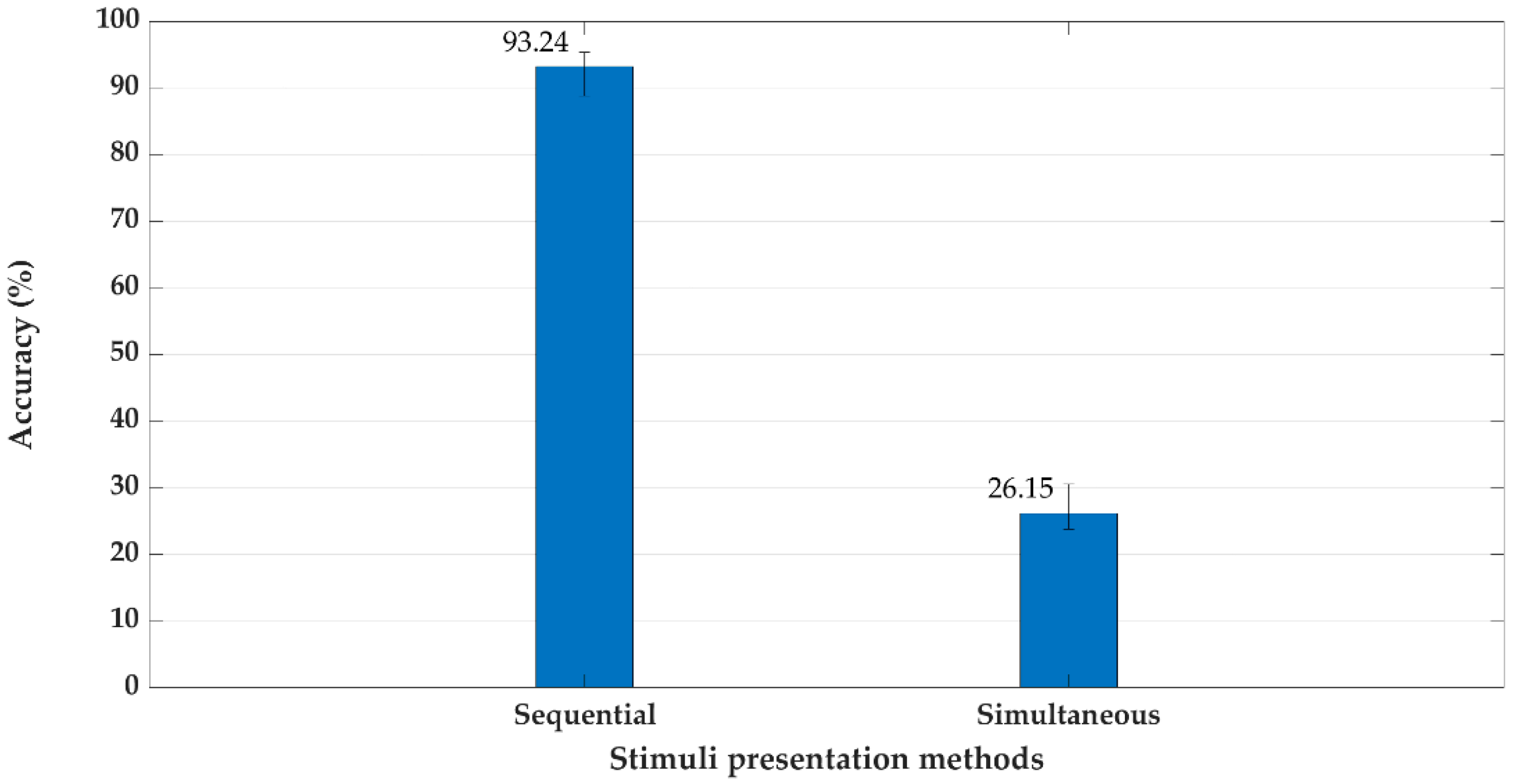
We also investigated the effects of two distinct presentation methods: sequential and simultaneous. Our results revealed a large and highly significant difference in accuracy between these two methods. Sequential presentation yielded an impressively high average accuracy rate of 93.24%, indicating that participants were highly adept at recognizing vibrotactile patterns when presented sequentially.
In contrast, the average accuracy for the simultaneous method was substantially lower (26.15%). This very large difference clearly demonstrates that the presentation order of the vibrotactile patterns greatly affects accuracy (Figure 5).
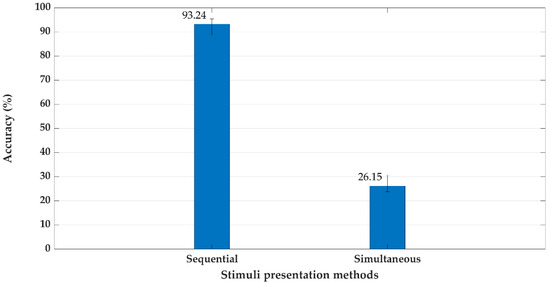
Figure 5.
Accuracy for the two different stimulus presentation methods (sequential and simultaneous).
4.3. Stimulus Order Effects
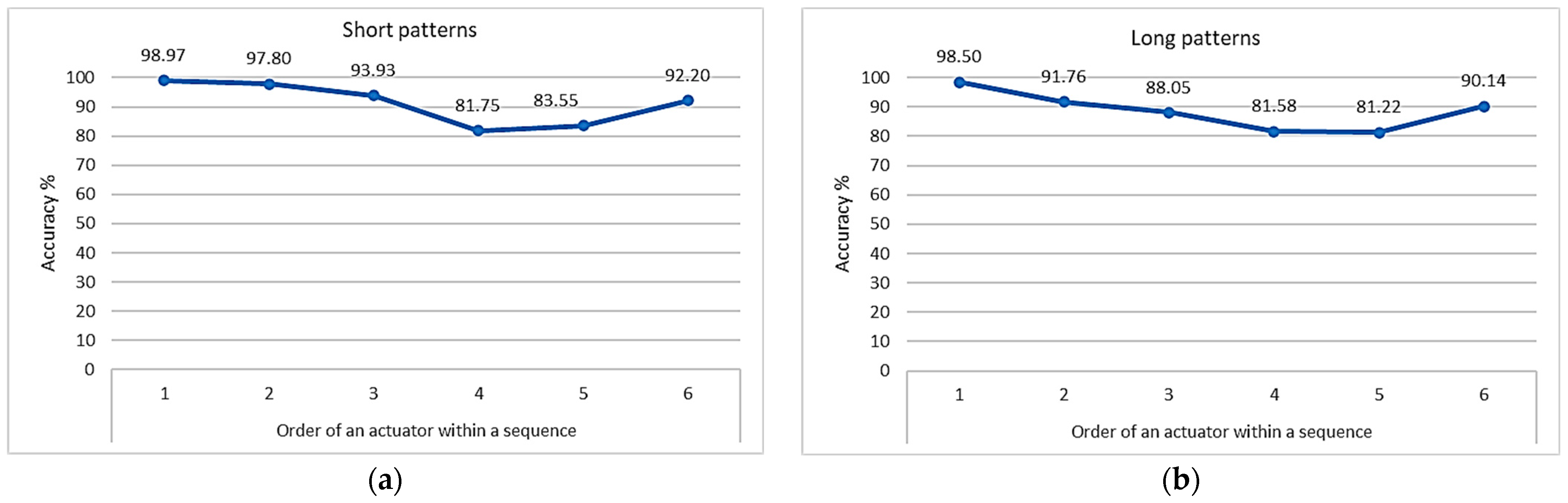
Figure 6 illustrates how the average accuracy for the recognition of stimuli presented during sequential presentation is influenced by the serial position of the stimulation. The accuracy shows both of the well-known primacy and recency effects [37].
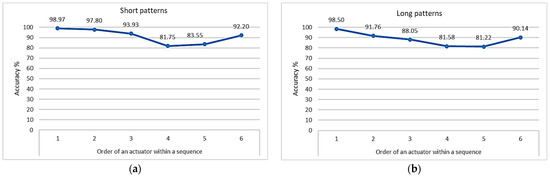
Figure 6.
(a) Accuracy as a function of serial position of each individual vibrotactile stimulation during sequential presentation for short (2–3 actuators) and (b) long patterns (4–5 actuators).
The primacy effect entails that stimuli presented at the beginning of a sequence are more easily reported. The recency effect is seen in the fact that participants exhibited higher perceptual accuracy and recall for stimuli presented later in the sequence. These serial position effects and their influence on recognition of the patterns provide important insights into how the order of stimulus presentation impacts participants’ perception and memory [38,39].
4.4. Learning Effects
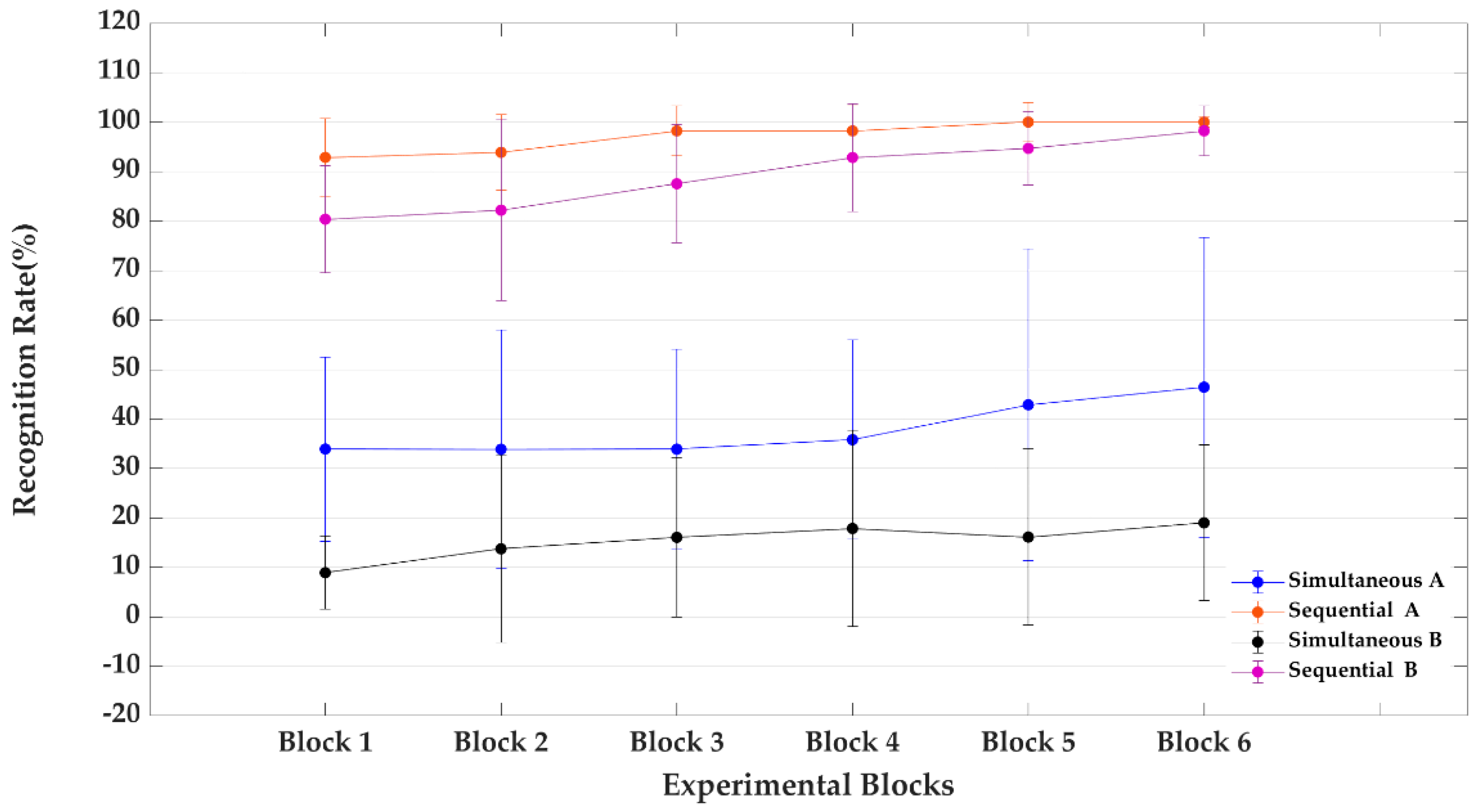
An additional finding is that participants’ average accuracy in recognizing vibrotactile patterns increased throughout the course of the six experimental blocks, showing a clear learning effect over time (see Figure 7). An ANOVA analysis revealed significant differences in accuracy among the six experimental blocks (F (5, 168) = 2.91; p = 0.015), showing how pattern reproduction improved as the experiment progressed.
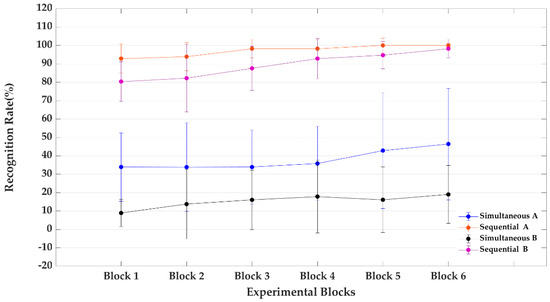
Figure 7.
Performance across the six experimental blocks. The figure shows a clear learning effect over time (the 6 experimental blocks) for both presentation methods (simultaneous and sequential) and different pattern lengths (short (A) versus long (B) patterns). The error bars show the standard deviation within each group for each block.
This emphasizes the importance of considering training schedules for sensory substitution devices, in light of the considerable improvement that we see over only a 35 min. long experiment. Training should, therefore, be considered in addition to presentation methods and pattern lengths when designing experiments on the recognition of vibrotactile patterns, but even more importantly, it should be considered when sensory substitution devices are designed. Adequate training ensures that participants have the necessary knowledge and skills to perform the tasks or recognize the patterns that are being tested.
Without proper training, experimental results may be influenced by participants’ lack of familiarity with the task in each case. The finding of a learning effect over a relatively short experiment duration emphasizes the dynamic nature of vibrotactile pattern recognition and the potential for rapid performance improvement. This knowledge is valuable for designing effective training schedules and optimizing the usability of sensory substitution devices. When planning experiments on vibrotactile pattern recognition, it is therefore essential to factor in not only training but also the potential for skill development over time, along with other variables such as presentation methods and pattern length.
Overall, Table 3 provides insights into how the performance indicators in this study differed in terms of their presentation methods, accuracy rates, pattern lengths, stimulation times, learning effects, serial position effects, and user feedback in the context of cognitive tasks.
Table 3.
Comparison of performance indicators in this study.
5. Discussion
We introduced a novel approach to presenting vibrotactile stimulation patterns with a forearm-mounted wearable vibrotactile sleeve, where Braille-like patterns were conveyed with tactile actuators. Our investigation focused on comparing the effectiveness of sequential versus simultaneous presentations of vibrotactile stimuli, as well as evaluating the influence of pattern length on recognition accuracy.
The results provide evidence in support of sequential over simultaneous stimulus presentation. We observed a vastly higher average accuracy rate for sequential (93.24%) presentation than simultaneous (26.15%). It is nevertheless important to note that the total stimulation time was lower for simultaneous presentation (1000 ms) than sequential, which could take from 1450 ms (for two activations) to 4300 ms (for five activations). This difference in presentation time affects how much information can be transmitted and is a question that needs to be addressed in future studies.
It is also important to consider the practical implications of sequential versus simultaneous presentation. In real-world scenarios (such as reading Braille text), the efficient retrieval of information is crucial. The practicality of any Braille design therefore involves a delicate balance between accuracy and speed. Although this aspect was not the primary focus in this phase of study, it is nevertheless a consideration to be addressed in future research.
Furthermore, we observed large accuracy differences between the two vibrotactile pattern lengths (long versus short). Accuracy was significantly higher for the short patterns requiring 2–3 actuators than the long patterns requiring 4–5 actuators. Pattern length, therefore, has a large effect on accuracy, with short patterns leading to higher perceptual accuracy. This difference was seen for both simultaneous and sequential presentations. But here again, we should note that more information can be conveyed with longer patterns, and future studies need to determine the optimal combination of stimulus time and pattern length for conveying tactile information. It is also important to consider to what degree these differences between short and long patterns may reflect different demands on working memory and increased s for responding.
Moreover, we investigated potential learning effects on pattern recognition accuracy across the six blocks. The results revealed a consistent improvement in average accuracy over time, indicating that participants were able to improve their ability to reproduce the vibrotactile patterns. This was also the case for simultaneous presentation, although performance levels remained relatively low.
Overall, our findings emphasize the importance of considering stimulus presentation methods and vibrotactile pattern lengths when designing experiments related to haptic pattern recognition, in addition to taking learning into account. These insights are crucial for the development of effective vibrotactile pattern recognition devices and training programs.
We also investigated any potential serial position effects, which can shed light on the effects of the order of stimulus presentation on perceptual recognition. We observed both a primacy effect (better performance for stimuli at the beginning of a sequence) and a recency effect (higher accuracy for stimuli at the end of a sequence). Performance was, on the other hand, slightly poorer for activations during the middle of the sequences than for the initial and final stimuli.
Regarding the differences between presentation modes, during sequential activation, participants have the advantage of analyzing the activations one at a time, using their working memory to process and identify patterns. Conversely, simultaneous activation requires rapid, concurrent processing of multiple activations, which may surpass their working memory capacity.
Potential Applications to Braille Presentation
Our ultimate aim is to develop a wearable device for presenting Braille with vibrotactile stimulation. While our current experiments involved the performance of college students without prior Braille literacy, they are a necessary first step in this development. It is important to obtain reliable results for our equipment before engaging with a more specific and sensitive population. During this initial phase of our research, we therefore focused on the ability to reproduce vibrotactile patterns, irrespective of Braille expertise. We also aimed to assess the basic functionality and reliability of the wearable, ensuring that it can be a versatile tool in a wide range of scenarios beyond Braille reading.
One of our next steps is to test the performance of actual Braille readers with this device. Notably, visually impaired individuals often have an acute sense of touch, and there is good evidence of neural reorganization and enhanced abilities following sensory impairment [40].
For example, there is evidence that Braille reading recruits the visual cortex of blind individuals [7,41,42]. It will furthermore be of future interest to investigate the relation between such neural reorganization and the age of onset of sensory impairment in the context of our device. Other factors to consider include investigation into the biocompatibility of the vibrotactile stimulation system, cross-modal plasticity, innervation, skin composition, skin thickness, and individual variations in sensory processing.
We believe that Braille conveyed through tactile stimulation can offer significant benefits over other presentation methods. Consider the scenario of a blind person navigating an unfamiliar city. While audiobooks and voice-based navigation apps undoubtedly provide valuable information about their surroundings, the integration of tactile Braille patterns through a wearable device can complement and enrich their experience in several ways.
In densely populated urban environments, audio cues can be challenging to discern and may even become drowned out. In such instances, tactile Braille can convey directions or street names to the skin. This hands-free approach not only obviates the need to carry and operate additional devices but also ensures privacy and discretion. The tactile feedback can also serve as a tactile map, allowing users to better comprehend intricate environments such as subway systems or train stations.
Moreover, the benefits of tactile Braille may extend to situations where rapid responses are needed. In such scenarios, tactile alerts delivered to the skin can provide immediate guidance, allowing the visually impaired to react swiftly.
The implications of our research can also be extended to other uses, including haptic communication, assistive technologies, and virtual and augmented reality systems, where the effective presentation of vibrotactile stimuli is crucial.
6. Conclusions
Our primary objective was to investigate ways of optimizing information conveyance through tactile stimulation on the forearm. We pursued this by investigating optimal tactile information encoding and presentation and by designing user-friendly wearables for accurate delivery. Central to our research is the aim to improve tactile communication, with a focus on accessibility.
The results have the following implications:
- Sequential vibrotactile stimulus presentation is, overall, preferable to simultaneous presentation.
- Shorter patterns yield better performance than longer ones, offering insights into optimizing information conveyance and presentation durations.
- We observed learning effects with repeated testing, underscoring the value of training for such devices.
- Primacy and recency effects in stimulus order during sequential presentation deepen our understanding of perception and memory in sequential contexts.
These findings offer important insight for the design of effective vibrotactile pattern recognition programs and for fine-tuning parameters for vibrotactile presentations of Braille.
Author Contributions
N.Y. contributed to the methodology, formal analysis, investigation, data curation, software, writing—original draft preparation. I.M. contributed to the methodology. R.U. contributed to the methodology, writing review, and editing and supervision. Á.K. contributed to the methodology, writing, and editing and co-supervision. All authors have read and agreed to the published version of the manuscript.
Funding
The work described in this paper received financial support from NordForsk’s Nordic University Hub “Nordic Sound and Music Computing Network–NordicSMC” (project no. 86892) and the Technology Development Fund (project no. 1910271).
Institutional Review Board Statement
Ethical review and approval were waived through the Icelandic bioethics committee “Vísindasiðanefnd” for this study, because the study is not scientific research in the health sector, as defined by the Act on Scientific Research in the Health Sector No. 44/2014.
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
The data presented in this study are available on request from the corresponding author. The data are not publicly available due to privacy and project restrictions.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Fricke, T.R.; Tahhan, N.; Resnikoff, S.; Papas, E.; Burnett, A.; May Ho, S.; Naduvilath, T.; Naidoo, K.S. Global Prevalence of Presbyopia and Vision Impairment from Uncorrected Presbyopia: Systematic Review, Meta-analysis, and Modelling. Ophthalmology 2018, 125, 1492–1499. [Google Scholar] [CrossRef] [PubMed]
- Weygand, Z. The Blind in French Society from the Middle Ages to the Century of Louis Braille; Stanford University Press: Redwood City, CA, USA, 2009. [Google Scholar]
- Fukumoto, M.; Sugimura, T. Active click: Tactile feedback for touch panels. In CHI’01 Extended Abstracts on Human Factors; ACM: New York, NY, USA, 2001. [Google Scholar]
- Hoggan, E.; Brewster, S.A.; Johnston, J. Investigating the effectiveness of tactile feedback for mobile touchscreens. In Proceedings of the CHI’08: Proceeding of the Twenty-Sixth Annual SIGCHI Conference on Human Factors in Computing Systems, Florence, Italy, 5–10 April 2008. [Google Scholar]
- Hoggan, E.; Kaaresoja, T.; Laitinen, P.; Brewster, S. Crossmodal congruence: The look, feel and sound of touchscreen widgets. In Proceedings of the ICMI 08: Proceedings of the 10th International Conference on Multimodal Interfaces, Chania, Greece, 20–22 October 2008. [Google Scholar]
- Ren, K.; Liu, S.; Lin, M.; Wang, Y.; Zhang, Q. A compact electroactive polymer actuator suitable for refreshable Braille display. Sens. Actuators A Phys. 2008, 143, 335–342. [Google Scholar] [CrossRef]
- Kristjánsson, Á.; Moldoveanu, A.; Jóhannesson, Ó.; Balan, O.; Spagnol, S.; Valgeirsdóttir, V.; Unnthorsson, R. Designing sensory-substitution devices: Principles, pitfalls and potential. Restor. Neurol. Neurosci. 2016, 34, 769–787. [Google Scholar] [CrossRef] [PubMed]
- Hoffmann, R.; Spagnol, S.; Kristjánsson, Á.; Unnthorsson, R. Evaluation of an Audio-haptic Sensory Substitution Device for Enhancing Spatial Awareness for the Visually Impaired. Optom. Vis. Sci. 2018, 95, 757–765. [Google Scholar] [CrossRef] [PubMed]
- Brown, L.M.; Brewster, S.A.; Purchase, H.C. Multidimensional tactons for non-visual information presentation in mobile devices. In Proceedings of the 8th Conference on Human-Computer Interaction with Mobile Devices and Services, Espoo, Finland, 12–15 September 2006; pp. 231–238. [Google Scholar]
- Bimbo, J.; Pacchierotti, C.; Aggravi, M.; Tsagarakis, N.G.; Prattichizzo, D. Teleoperation in cluttered environments using wearable haptic feedback. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3401–3408. [Google Scholar]
- Dobbins, T.; Jansen, C.; Van Veen, H.A.H.C.; Van Erp, J.B.F. Waypoint navigation with a vibrotactile waist belt. ACM Trans. Appl. Percept. 2005, 2, 106–117. [Google Scholar]
- Kammoun, S.; Jouffrais, C.; Guerreiro, T.; Nicolau, H.; Jorge, J. Guiding Blind People with Haptic Feedback. In Proceedings of the Pervasive 2012 Workshop on Frontiers in Accessibility for Pervasive Computing, New Castle, UK, 18–22 June 2012. [Google Scholar]
- Schätzle, S.; Weber, B.; Leichtmann, B. Hands-free reading Braille with a vibrotactile wristband. In Proceedings of the 11th International Conference on Interfaces and Human Computer, Lisbon, Portugal, 21–23 July 2017. [Google Scholar]
- Wong, M.; Gnanakumaran, V.; Goldreich, D. Tactile Spatial Acuity Enhancement in Blindness: Evidence for Experience-Dependent Mechanisms. J. Neurosci. 2011, 31, 7028–7037. [Google Scholar] [CrossRef] [PubMed]
- Goldreich, D.; Kanics, I.M. Performance of blind and sighted humans on a tactile grating detection task. Percept. Psychophys. 2006, 68, 1363–1371. [Google Scholar] [CrossRef]
- Legge, G.E.; Madison, C.; Vaughn, B.N.; Cheong, A.M.; Miller, J.C. Retention of high tactile acuity throughout the lifespan in blindness. Percept Psychophys. 2008, 70, 1471–1488. [Google Scholar] [CrossRef]
- Jones, L.A.; Sarter, N.B. Tactile Displays: Guidance for Their Design and Application. Hum. Factors 2008, 50, 90–111. [Google Scholar] [CrossRef]
- Cheung, B.; Van Erp, J.B.F.; Cholewiak, R.W. Anatomical, neurophysiological and perceptual issues of tactile perception. In Tactile Displays for Orientation, Navigation and Communication in Air, Sea and Land Environments; North Atlantic Treaty Organization: Neuilly-sur-Seine, France, 2008; pp. 1–18. [Google Scholar]
- Cholewiak, R.W.; Collins, A.A. Vibrotactile localization on the arm: Effects of place, space, and age. Percept. Psychophys. 2003, 65, 1058–1077. [Google Scholar] [CrossRef]
- Van Erp, J.B.F. Guidelines for the Use of Vibro-Tactile Displays in Human Computer Interaction. In Proceedings of the EuroHaptics, Edinburgh, UK, 8–10 July 2002. [Google Scholar]
- Choi, S.; Kuchenbecker, K.J. Vibrotactile Display: Perception, Technology, and Applications. Proc. IEEE 2013, 101, 2093–2104. [Google Scholar] [CrossRef]
- Pietrzak, T.; Crossan, A.; Brewster, S.; Martin, B.; Pecci, I. Creating usable pin array tactons for nonvisual information. IEEE Trans. Haptics 2009, 2, 61–72. [Google Scholar] [CrossRef] [PubMed]
- Nicolau, H.; Guerreiro, J.; Guerreiro, T.; Carriço, L. UbiBraille: Designing and Evaluating a Vibrotactile Braille-Reading Device. In Proceedings of the International ACM SIGACCESS Conference on Computers and Accessibility, Bellevue, WA, USA, 21–23 October 2013. [Google Scholar]
- van Erp, J. Tactile Displays for Navigation and Orientation: Perception and Behaviour; TR-HFM-122, NATO-RTO; Utrecht University: Utrecht, The Netherlands, 2007. [Google Scholar]
- Chen, Y.; Ren, X.; Huang, Z. A review of vibrotactile feedback approaches for digital images. IEEE Trans. Haptics 2016, 9, 349–362. [Google Scholar]
- Brewster, S.; Lumsden, J.; Bell, M.; Hall, M.; Tasker, S. Multimodal ‘Eyes-Free’ interaction techniques for wearable devices. In Proceedings of the CHI’03: Proceedings of the SIGCHI Conference on Human Factors in Computing Systems; Association for Computing Machinery: New York, NY, USA, 2003. [Google Scholar]
- Jóhannesson, Ó.; Bălan, O.; Unnthorsson, R.; Moldoveanu, A.; Kristjansson, A. The Sound of Vision Project: On the Feasibility of an Audio-Haptic Representation of the Environment, for the Visually Impaired. Brain Sci. 2016, 6, 20. [Google Scholar] [CrossRef] [PubMed]
- Hoffmann, R.; Valgeirsdóttir, V.; Jóhannesson, Ó.; Unnthorsson, R.; Kristjánsson, Á. Measuring relative vibrotactile spatial acuity: Effects of tactor type, anchor points and tactile anisotropy. Exp. Brain Res. 2018, 236, 3405–3416. [Google Scholar] [CrossRef] [PubMed]
- Hoffmann, R.; Brinkhuis, M.; Unnthorsson, R.; Kristjánsson, Á. The intensity order illusion: Temporal order of different vibrotactile intensity causes systematic localization errors. J. Neurophysiol. 2019, 122, 1810–1820. [Google Scholar] [CrossRef]
- Jóhannesson, Ó.; Hoffmann, R.; Valgeirsdóttir, V.; Unnþórsson, R.; Moldoveanu, A.; Kristjánsson, Á. Relative vibrotactile spatial acuity of the torso. Exp. Brain Res. 2017, 235, 3505–3515. [Google Scholar] [CrossRef] [PubMed]
- Hassanian, R.; Riedel, M.; Yeganeh, N. Numerical Investigation on the Acceleration Vibration Response of Linear Actuator. Open Access Libr. J. 2022, 9, 1–7. [Google Scholar] [CrossRef]
- Yeganeh, N.; Makarov, I.; Stefánsson Thors, S.S.; Kristjánsson, Á.; Unnthorsson, R. Evaluating the Optimum Distance between Voice Coil Actuators Using the Relative Point Localization Method on the Forearm. Actuators 2023, 12, 6. [Google Scholar] [CrossRef]
- Yeganeh, N.; Makarov, I.; Unnthorsson, R.; Kristjánsson, Á. Effects of Stimulus Frequency and Location on Vibrotactile Discrimination Performance Using Voice Coil Actuators on the Forearm. Actuators 2023, 12, 224. [Google Scholar] [CrossRef]
- Yeganeh, N.; Makarov, I.; Stefánsson Thors, S.S.; Ásgeirsson, H.; Kristjánsson, Á.; Unnþórsson, R. Vibrotactile Sleeve to Improve Music Enjoyment of Cochlear Implant Users. In Proceedings of the ASME 2022 International Mechanical Engineering Congress and Exposition, Columbus, OH, USA, 30 October–2 November 2022. [Google Scholar]
- Breitschaft, S.J.; Heijboer, S.; Shor, D.; Tempelman, E.; Vink, P.; Carbon, C.-C. The Haptic Fidelity Framework: A Qualitative Overview and Categorization of Cutaneous-Based Haptic Technologies Through Fidelity. IEEE Trans. Haptics 2022, 15, 232–245. [Google Scholar] [CrossRef] [PubMed]
- Ævarsson, E.A.; Ásgeirsdóttir, T.; Pind, F.; Kristjánsson, Á.; Unnthorsson, R. Vibrotactile Threshold Measurements at the Wrist Using Parallel Vibration Actuators. ACM Trans. Appl. Percept. 2022, 19, 1–11. [Google Scholar] [CrossRef]
- Ebbinghaus, H. Memory: A Contribution to Experimental Psychology; Ruger, H.A.; Bussenius, C.E., Translators; Dover: New York, NY, USA, 1964. [Google Scholar]
- Wiswede, D.; Rüsseler, J.; Münte, T.F. Serial position effects in free memory recall—An ERP-study. Biol. Psychol. 2007, 75, 185–193. [Google Scholar] [CrossRef] [PubMed]
- Golob, E.J.; Starr, A. Serial Position Effects in Auditory Event-related Potentials during Working Memory Retrieval. J. Cogn. Neurosci. 2004, 16, 40–52. [Google Scholar] [CrossRef] [PubMed]
- Castaldi, E.; Lunghi, C.; Morrone, M.C. Neuroplasticity in adult human visual cortex. Neurosci. Biobehav. Rev. 2020, 112, 542–552. [Google Scholar] [CrossRef]
- Rączy, K.; Urbańczyk, A.; Korczyk, M.; Szewczyk, J.M.; Sumera, E.; Szwed, M. Orthographic Priming in Braille Reading as Evidence for Task-specific Reorganization in the Ventral Visual Cortex of the Congenitally Blind. J. Cogn. Neurosci. 2019, 31, 1065–1078. [Google Scholar] [CrossRef]
- Sadato, N.; Pascual-Leone, A.; Grafman, J.; Ibañez, V.; Deiber, M.-P.; Dold, G.; Hallett, M. Activation of the primary visual cortex by Braille reading in blind subjects. Nature 1996, 380, 526–528. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).