
Microgravity Decoupling in Torsion Pendulum for Enhanced Micro-Newton Thrust Measurement

 , , ,
, , , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Device and Method
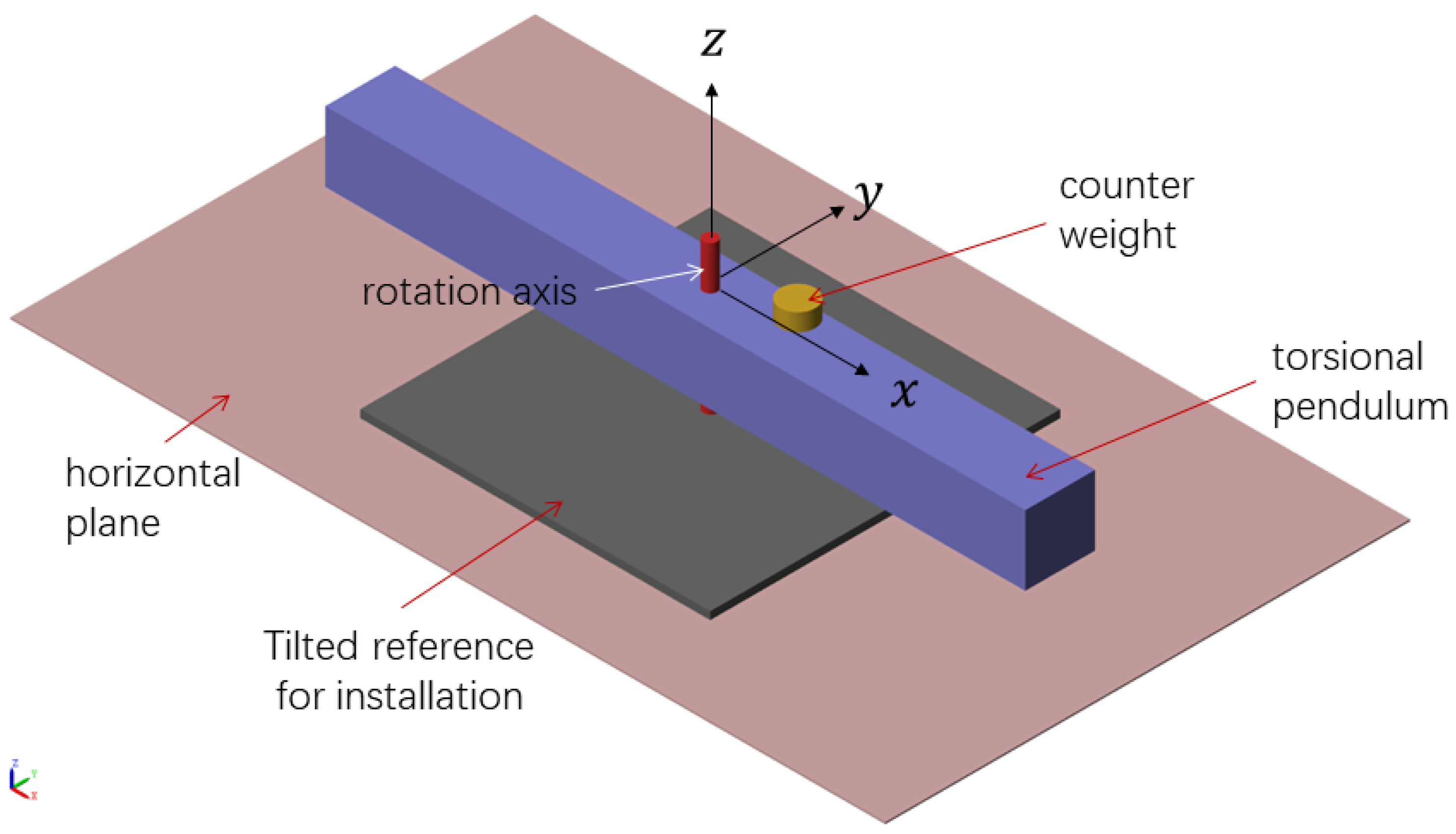
2.1. Torsion Pendulum and Its Dynamics
2.2. Modeling of Gravity Coupling
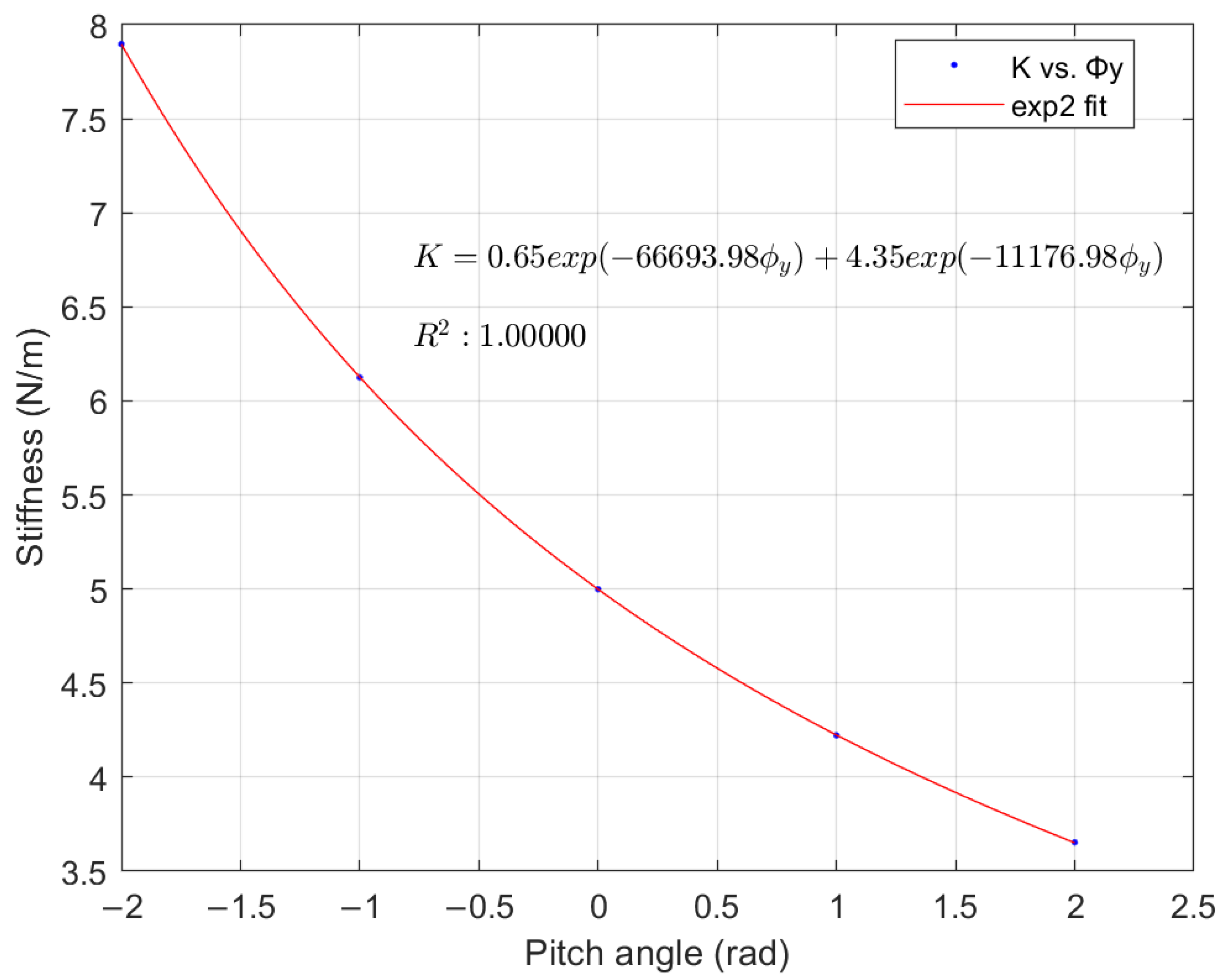
- :In this case, and the torque from the thrust and gravity act in the same direction. For example, when a force is applied to the torsional pendulum, although it experiences a restoring force from the pivot, the stiffness gradually decreases as the gravitational component introduced by the inclination increases.
- :In this case, the torque from the thrust and gravity act in opposite directions, but their combined torque is in the same direction as the thrust torque. The elastic torque and the gravity torque also act in the same direction, which means that the torsional pendulum and the gravity pendulum are superimposed. In this scenario, . Particularly, when , the stiffness increases sharply.
- :In this case, the torque from the thrust and gravity act in opposite directions, but their combined torque is in the same direction as the gravity torque. The elastic torque and the thrust torque also act in the same direction, resulting in a reverse stiffness of the system, . This is beyond the scope of this discussion.
3. Numerical Analysis
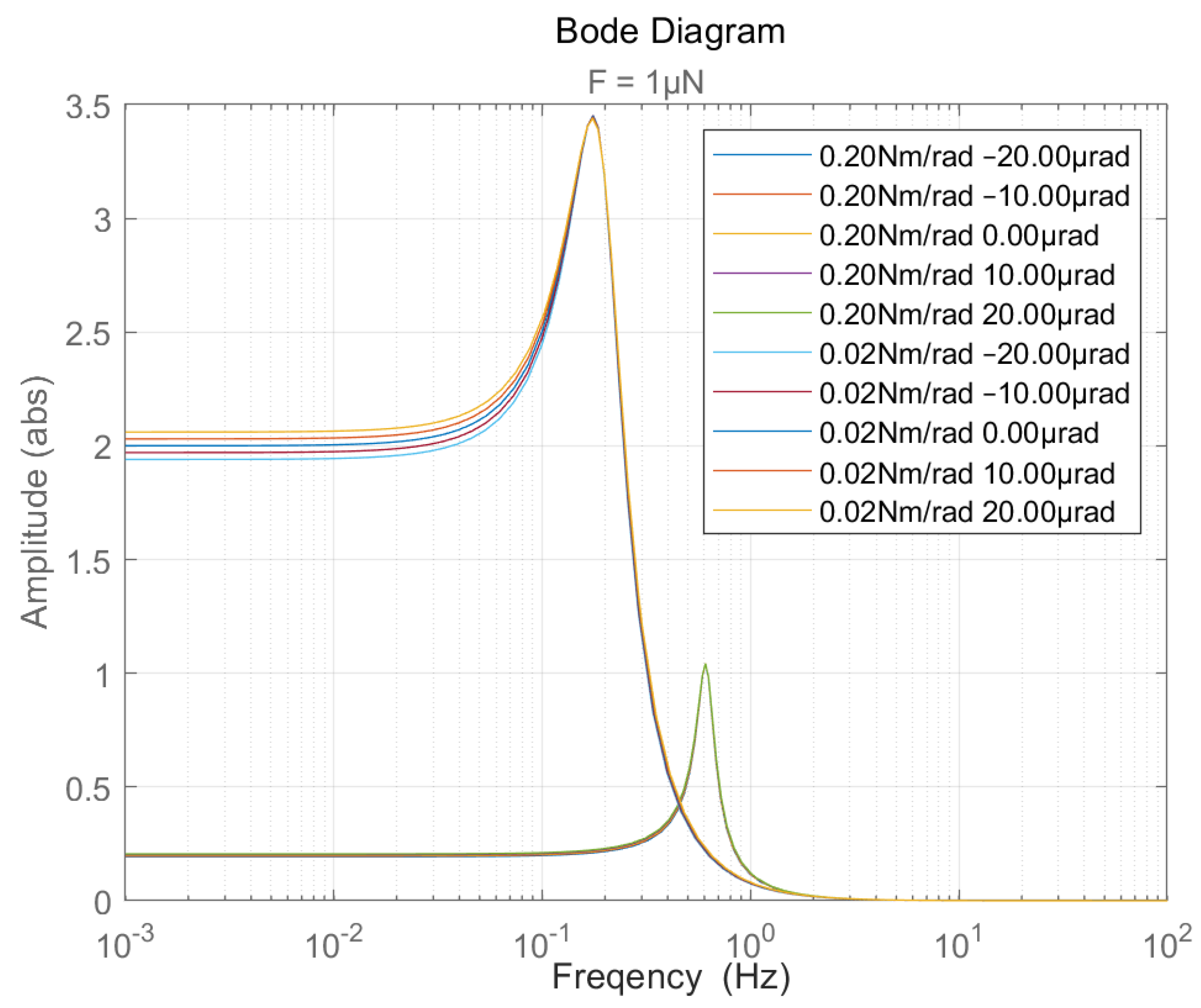
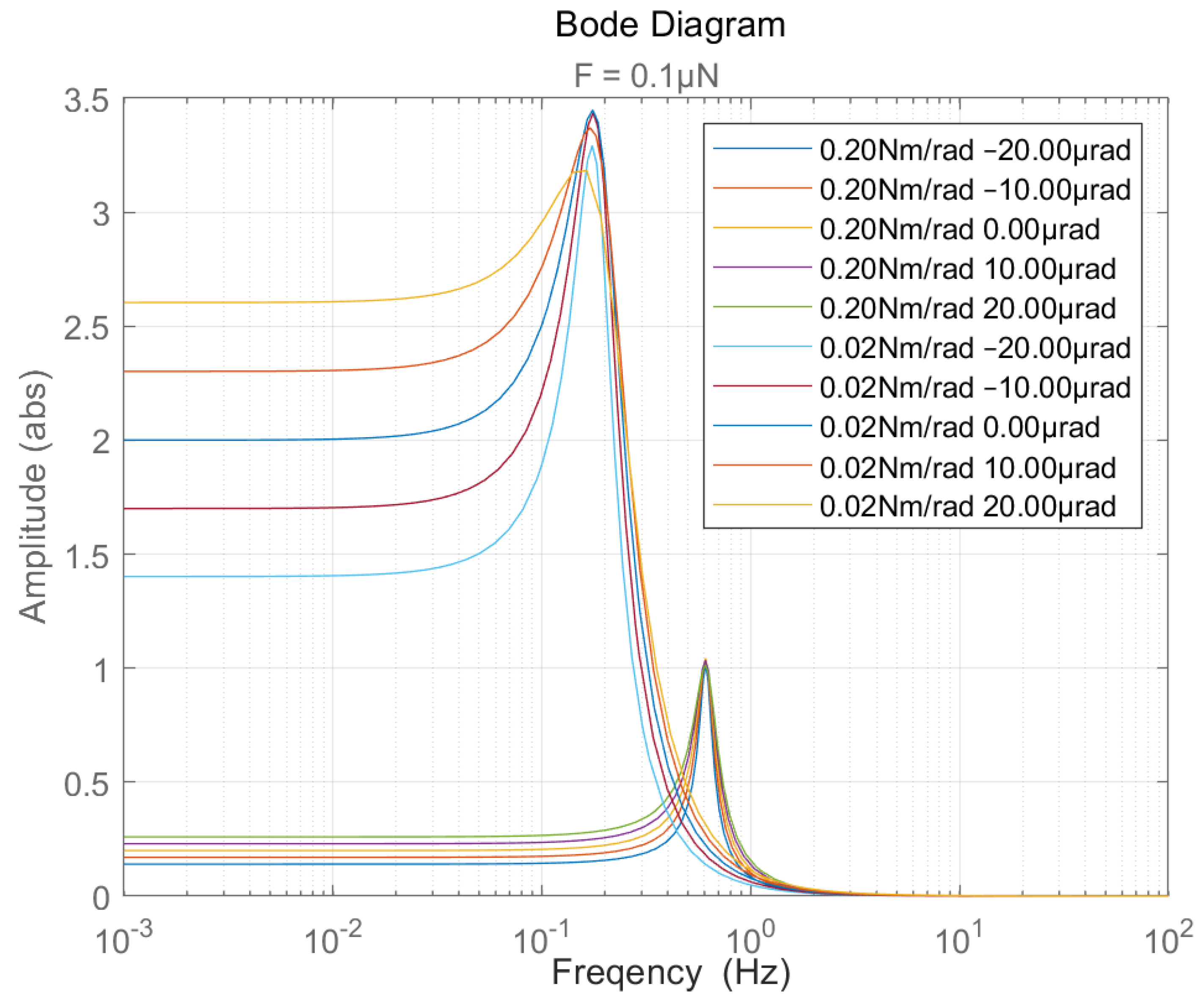
3.1. Multibody Simulation
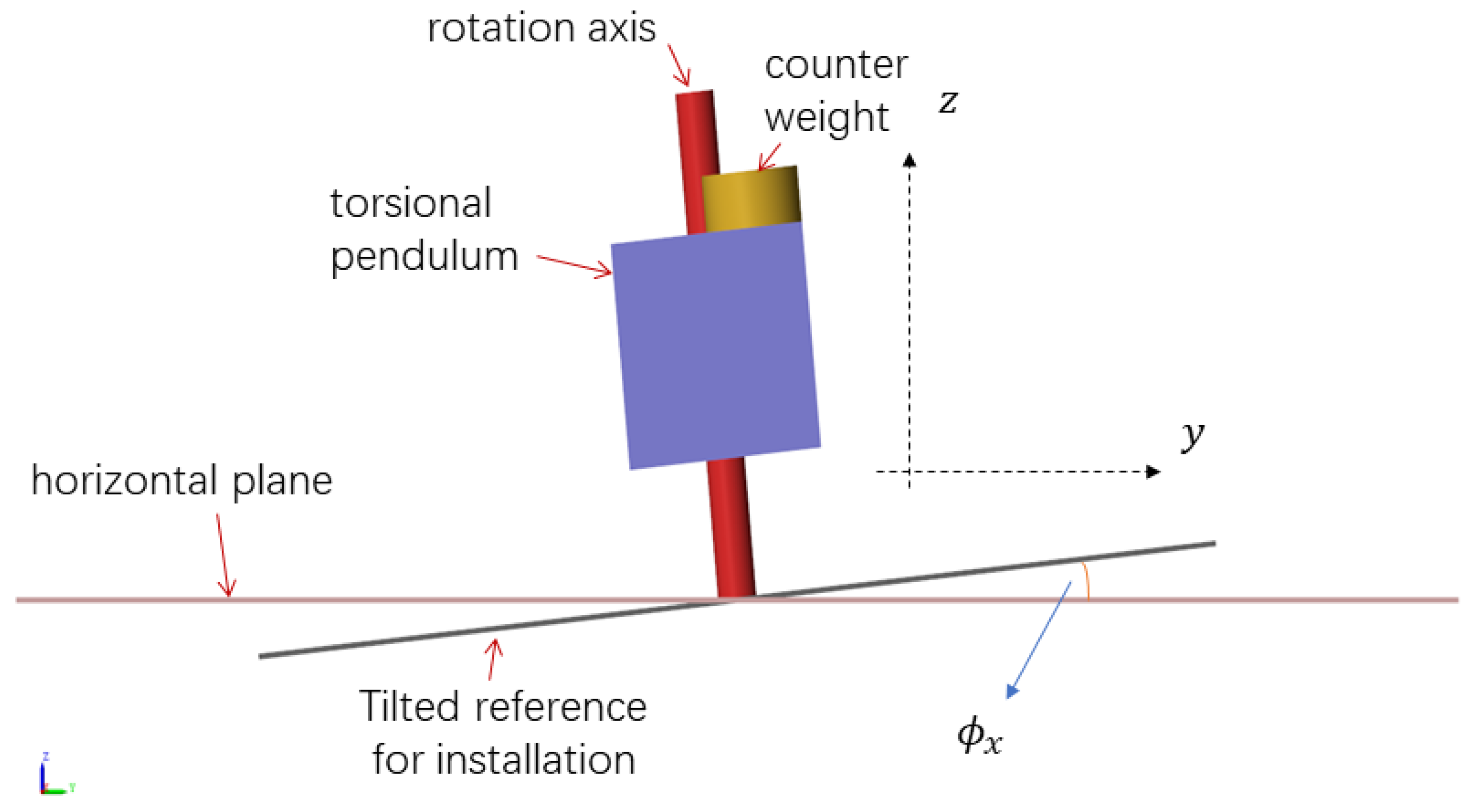
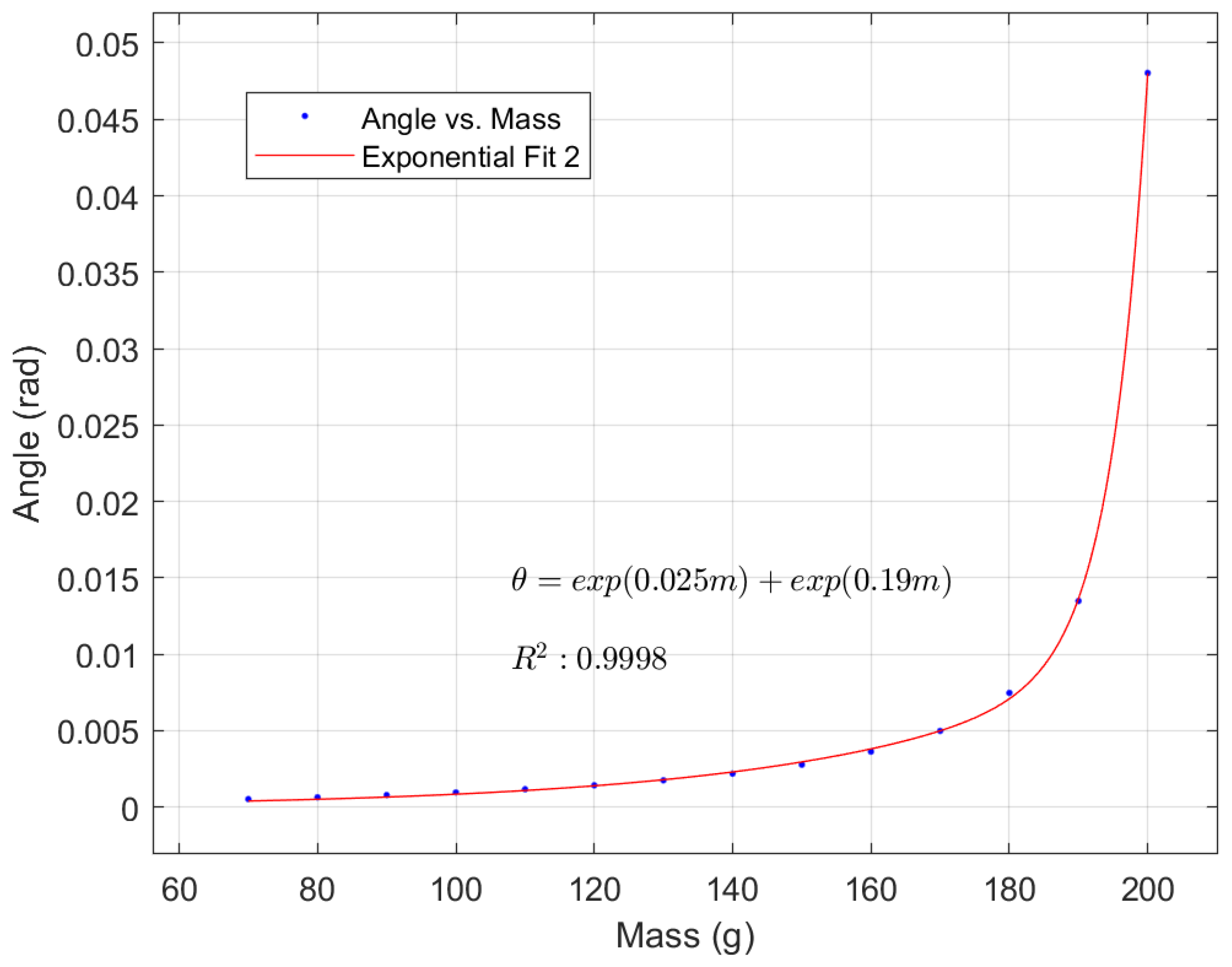
3.2. Tilt Angle Monitoring
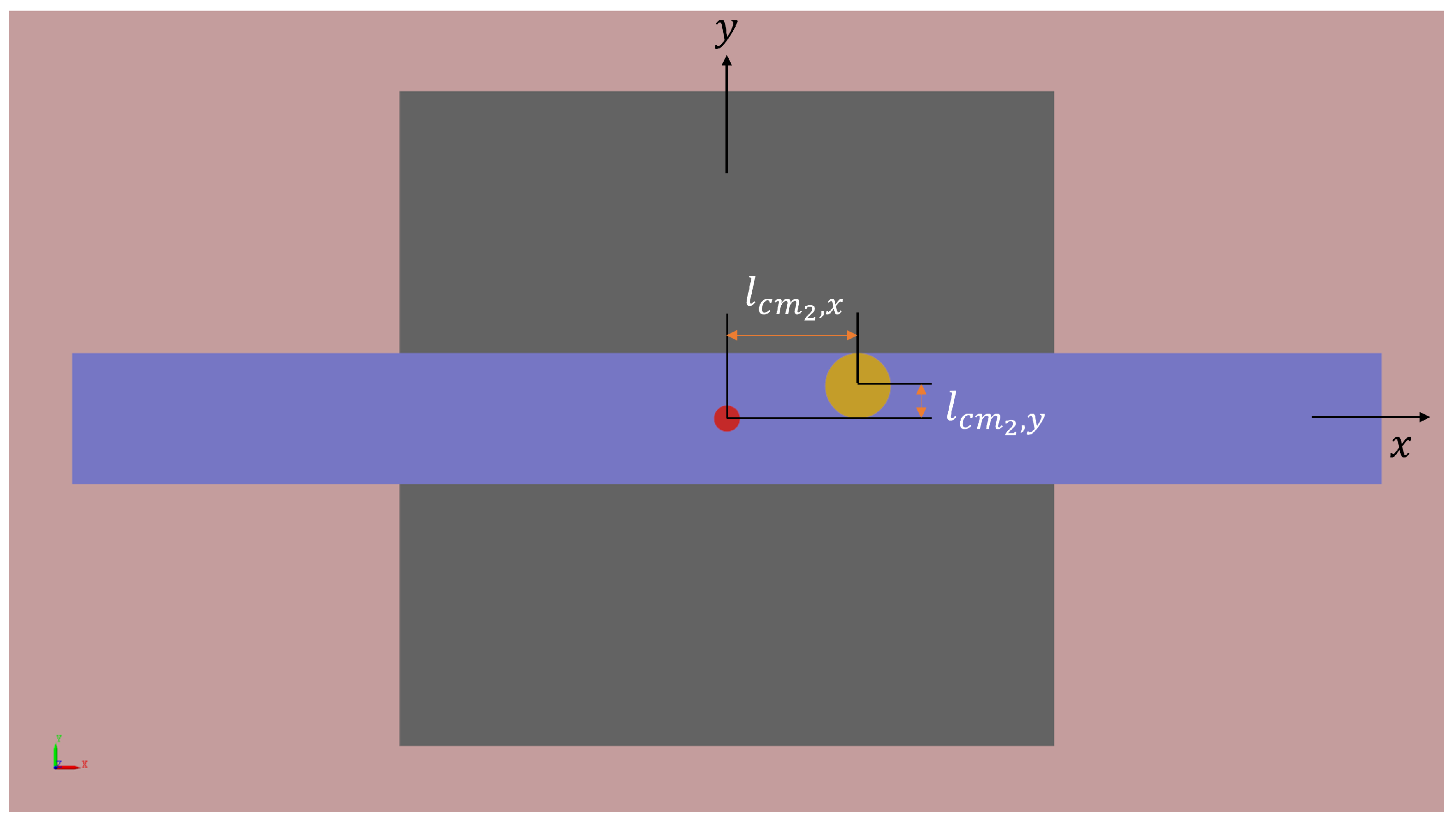
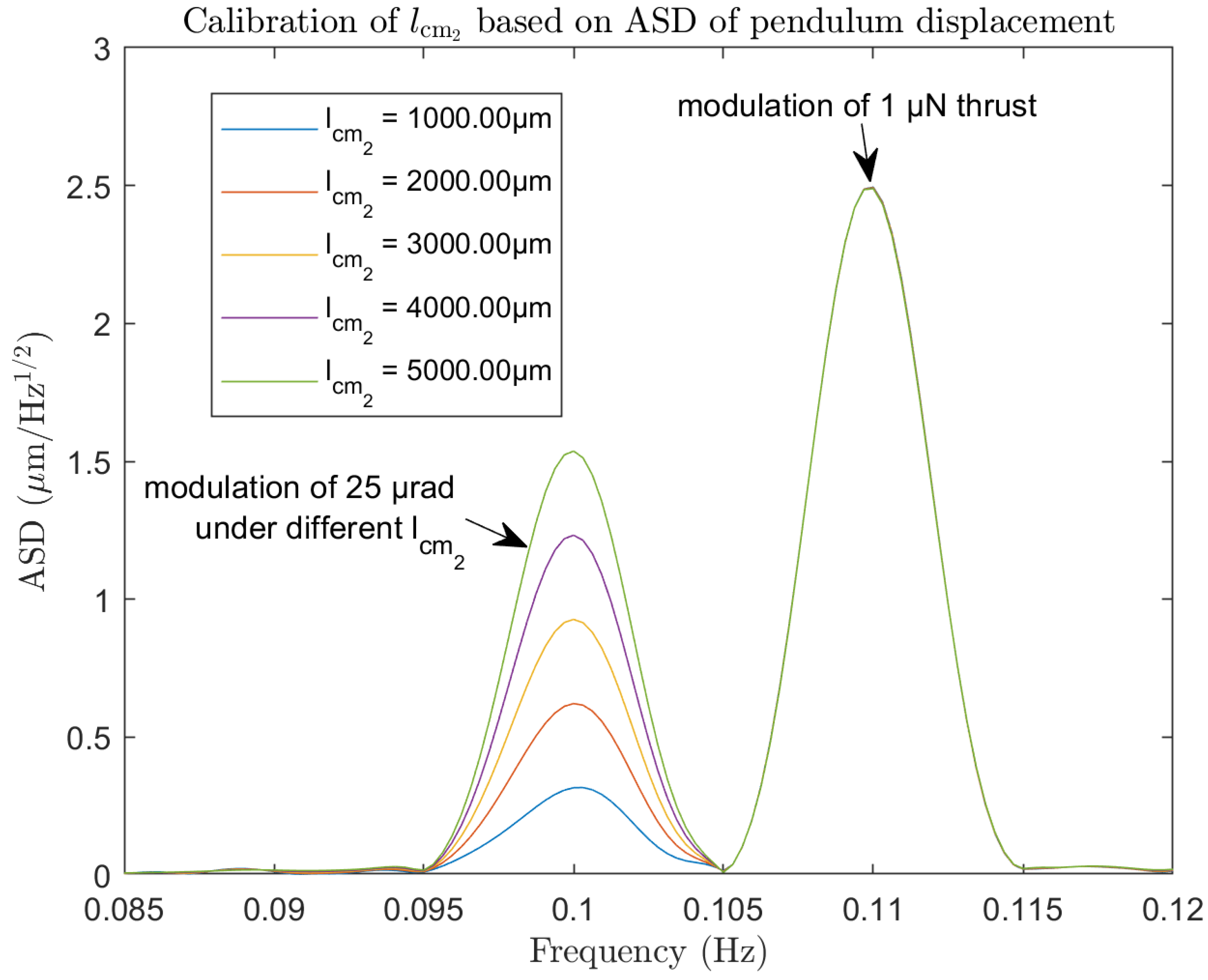
3.3. Center of Mass Calibration
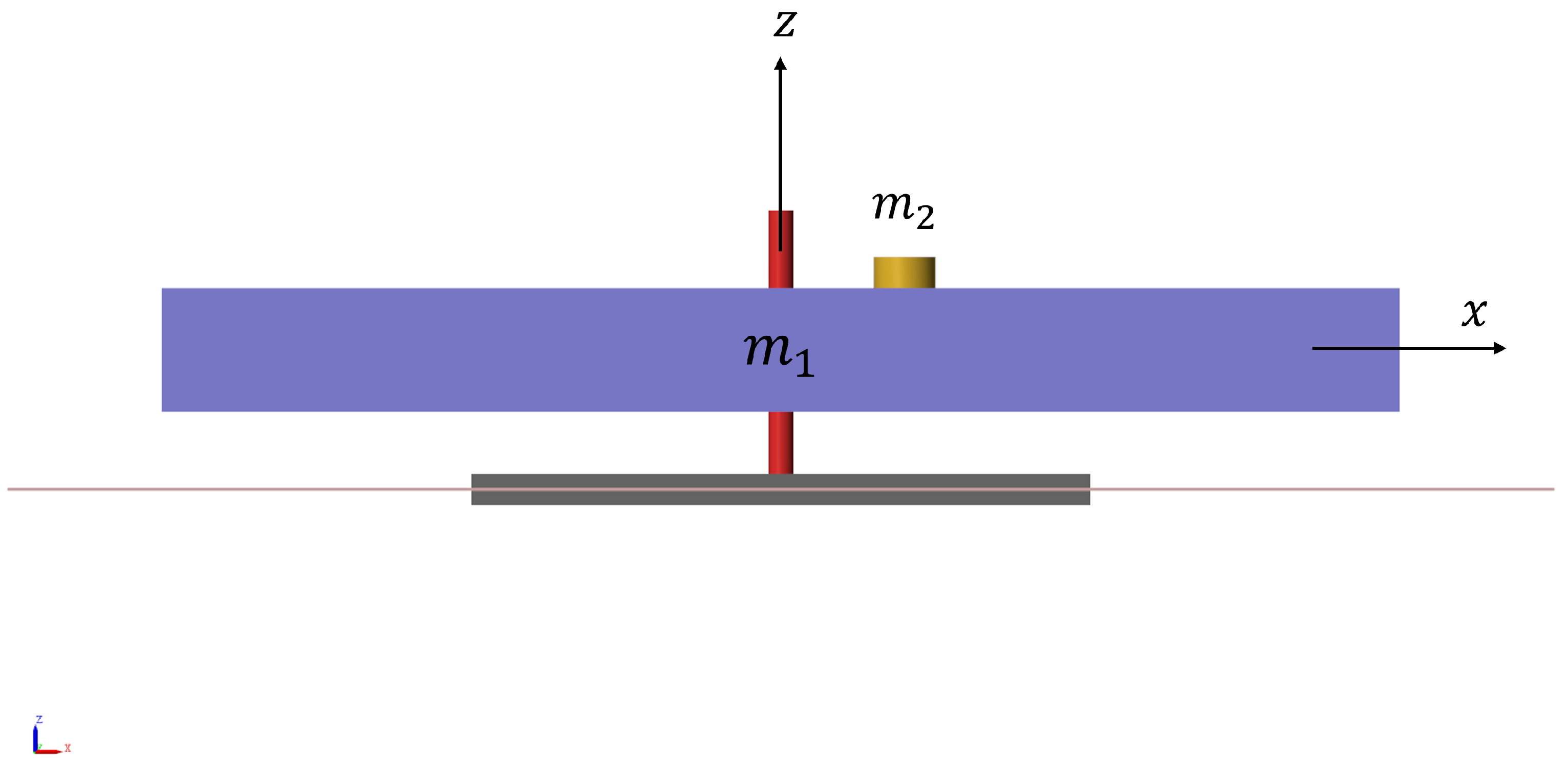
- Divide the mass of the pendulum frame into symmetric parts that are balanced on the left and right sides, and an unbalanced part (counterweight block). The sum of the mass of the balanced parts on both sides is , and the mass of the unbalanced counterweight block is .
- Define the center of mass position of as the coordinate origin (i.e., the pivot point), and the horizontal distance between the center of mass of the counterweight and the pivot point as . At this point, the overall mass of the pendulum frame is , and the center of mass position caused by the unbalanced counterweight is:Here, the overall center of mass offset of the pendulum frame is equivalent to the tilting moment caused by the counterweight alone.
- In particular, the horizontal distance between the center of mass of the counterweight block and the pivot point on the vertical plane in the direction perpendicular to the pendulum arm is . The center of mass offset caused by the counterweight block and the coupling due to the reference pitch tilt is:
- Similarly, the horizontal distance between the center of mass of the counterweight block and the pivot point on the horizontal plane in the direction of the pendulum arm is . The center of mass offset caused by the counterweight block and the coupling due to the reference roll tilt is:
4. Results and Discussion
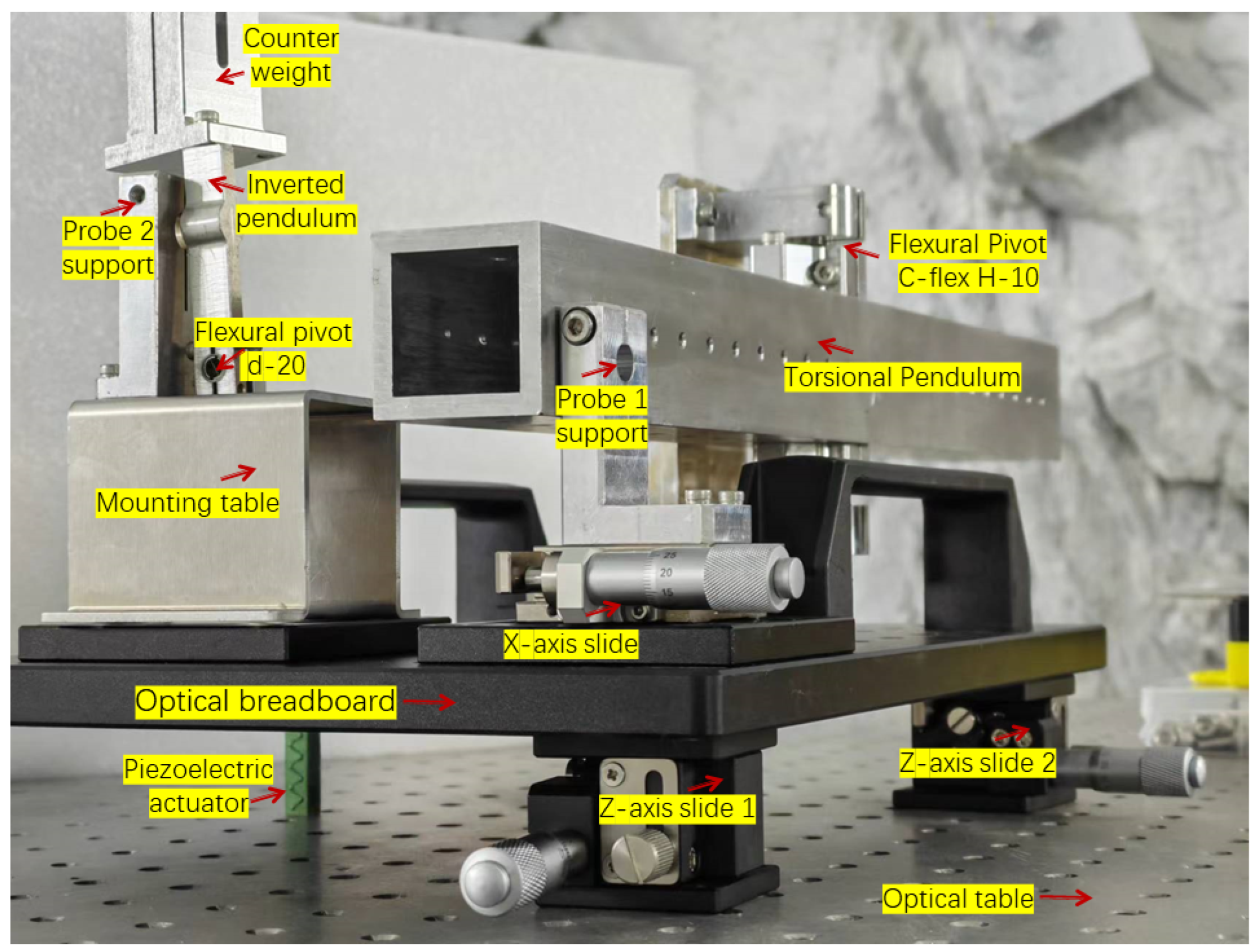
4.1. The Baseline Leveling Experiment
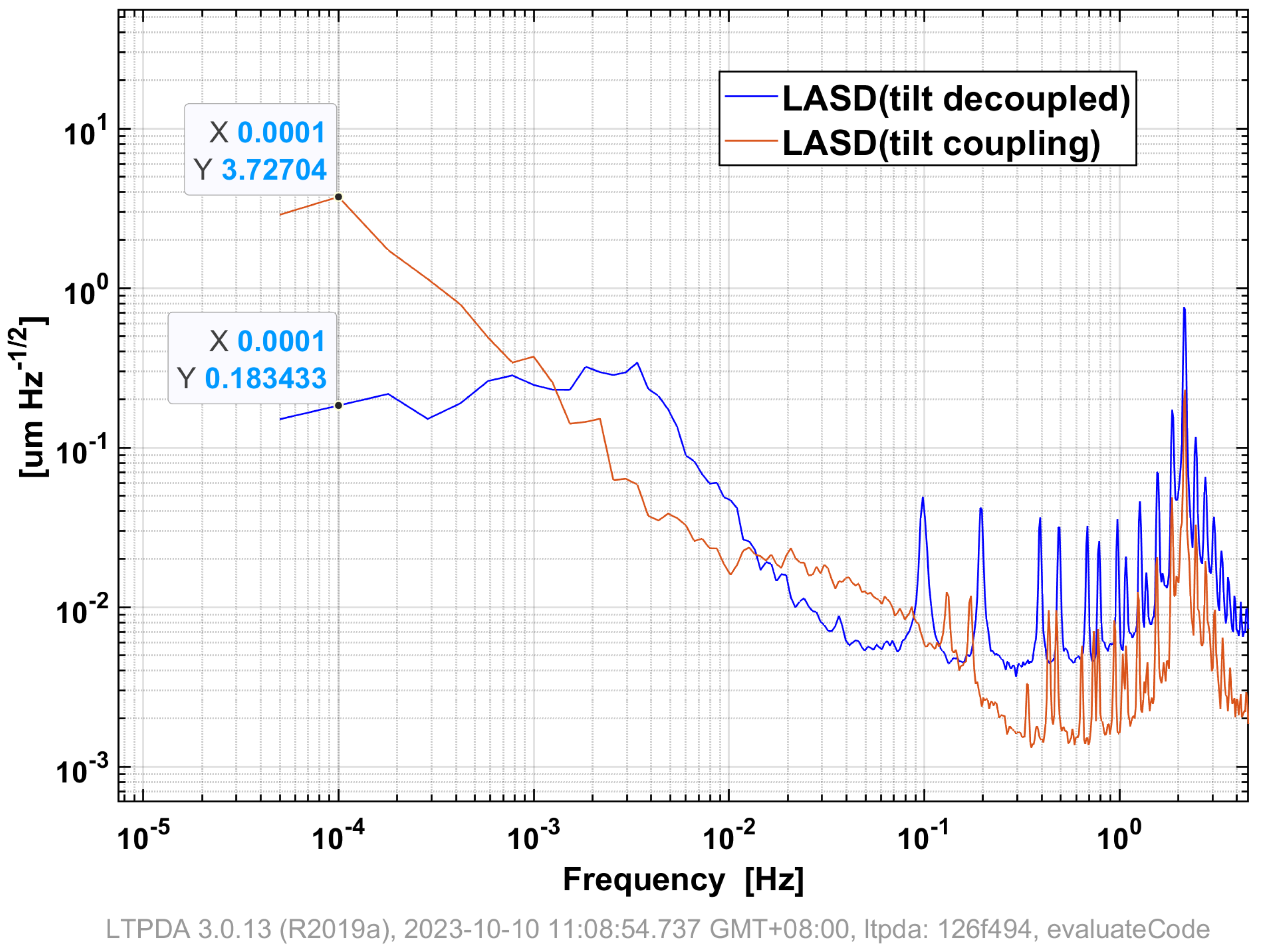
4.1.1. Tilt Detection
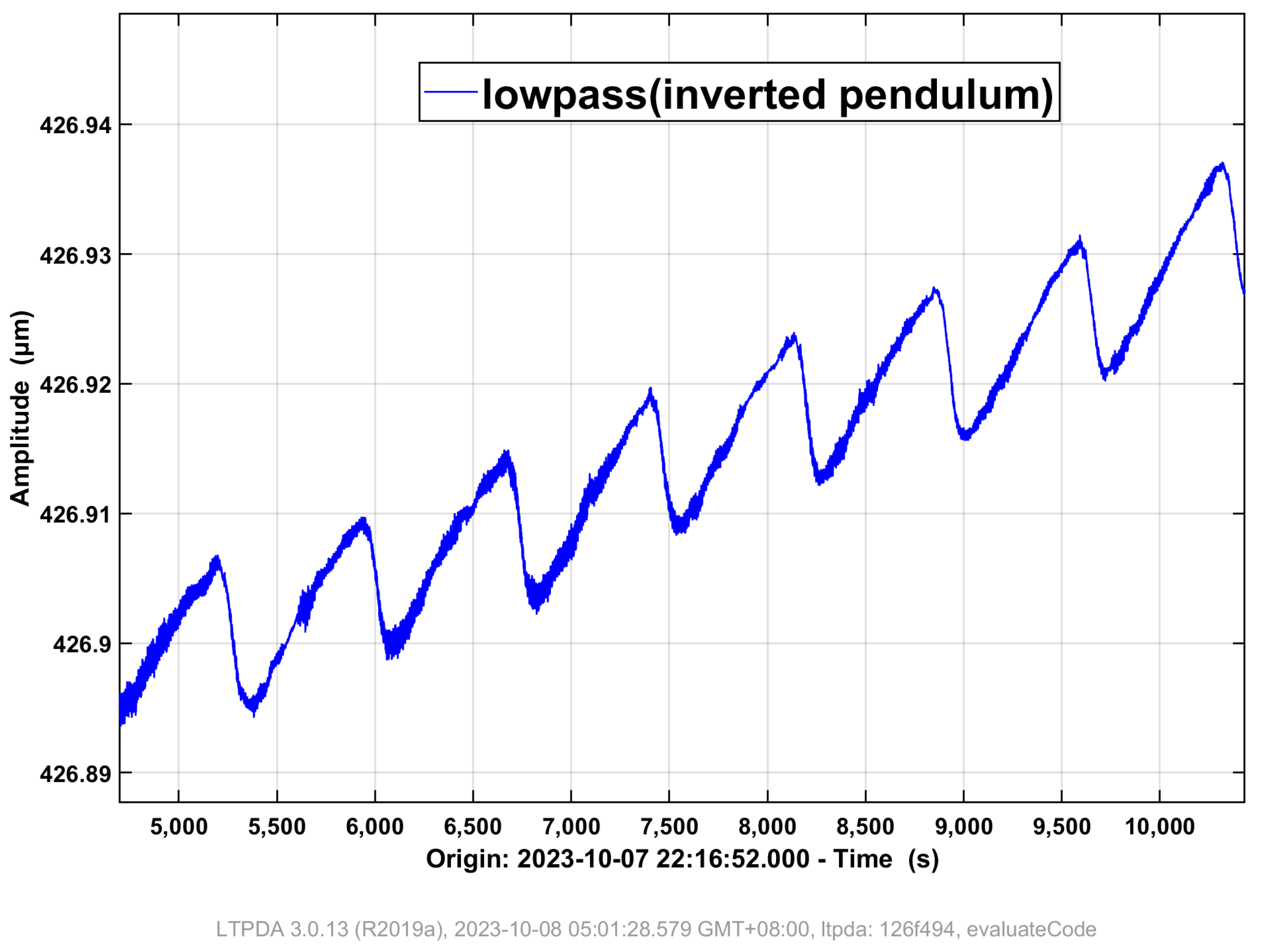
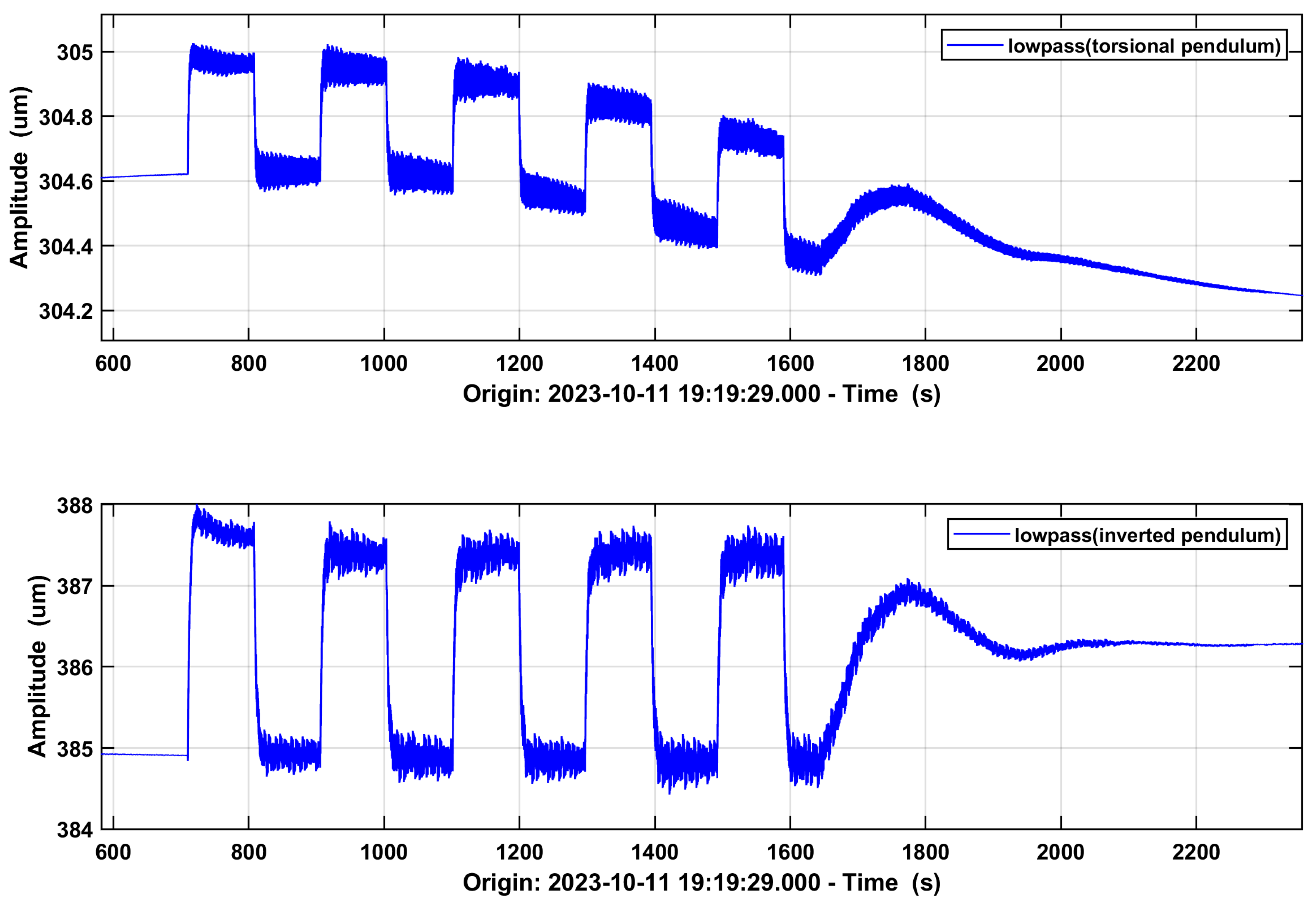
4.1.2. Tilt Modulation
4.1.3. Tilt Control
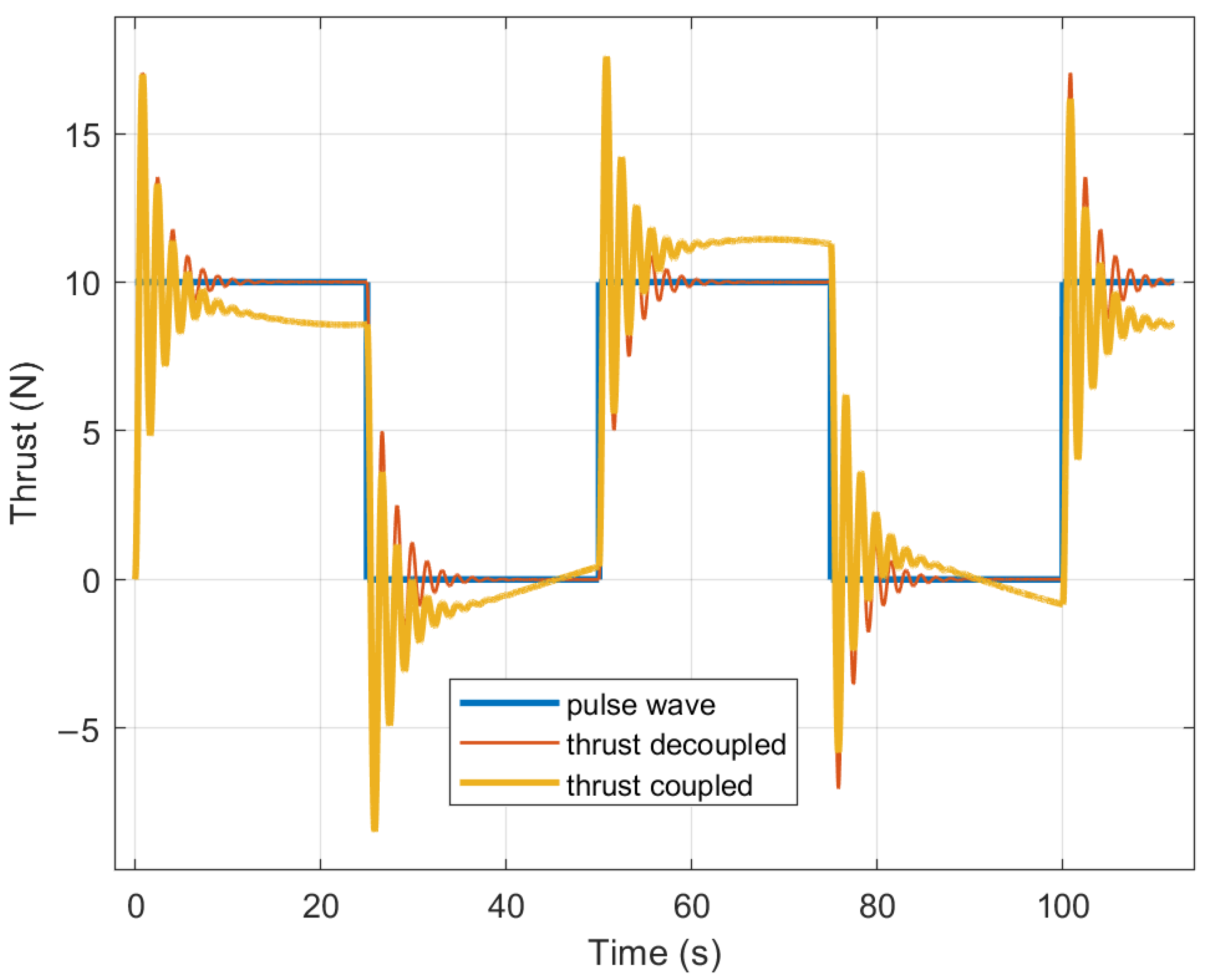
4.2. Two-Stage Decoupling Simulation
5. Conclusions
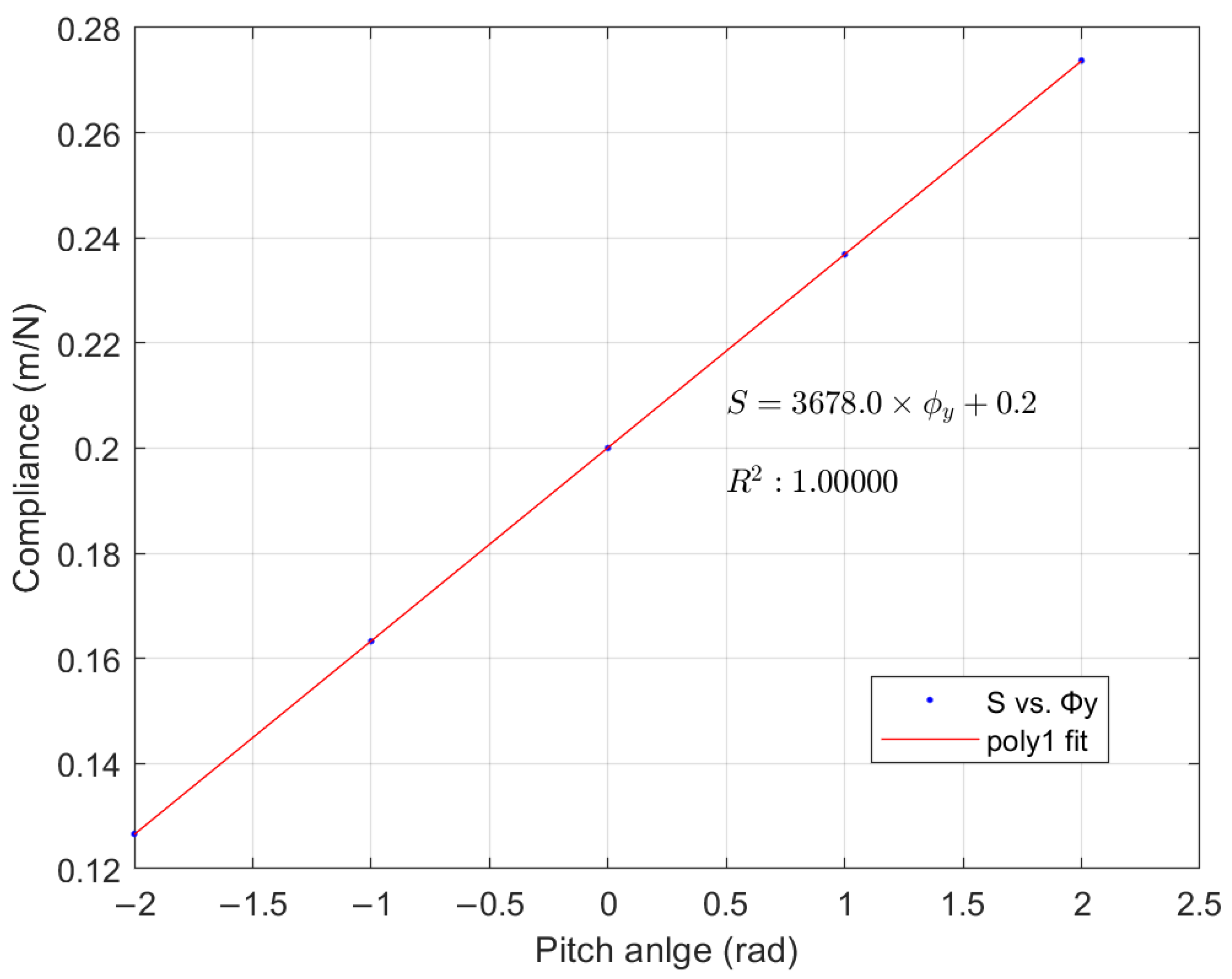
- The dynamic equations of the torsion pendulum are reconstructed by adding a microgravity additional term that couples tilt and eccentricity to the static equilibrium. The stiffness of the deformation under test is decomposed into elastic stiffness and gravity stiffness, and the influence of center of mass offset and baseline tilt is linearized using the concept of compliance.
- Using Simscape Multibody creatively to simulate the coupling effect of microgravity in the torsion pendulum, identifying the thrust position transfer function of the system, fitting the stiffness variation with a binomial exponential, and determining the error threshold of various factors that match the resolution force.
- Using an inverted pendulum to detect the baseline tilt of the torsion pendulum, studying the optimization of the relationship between the counterweight and deformation and tilt amplification, and numerically analyzing the center of mass calibration based on amplitude-modulated thrust-tilt.
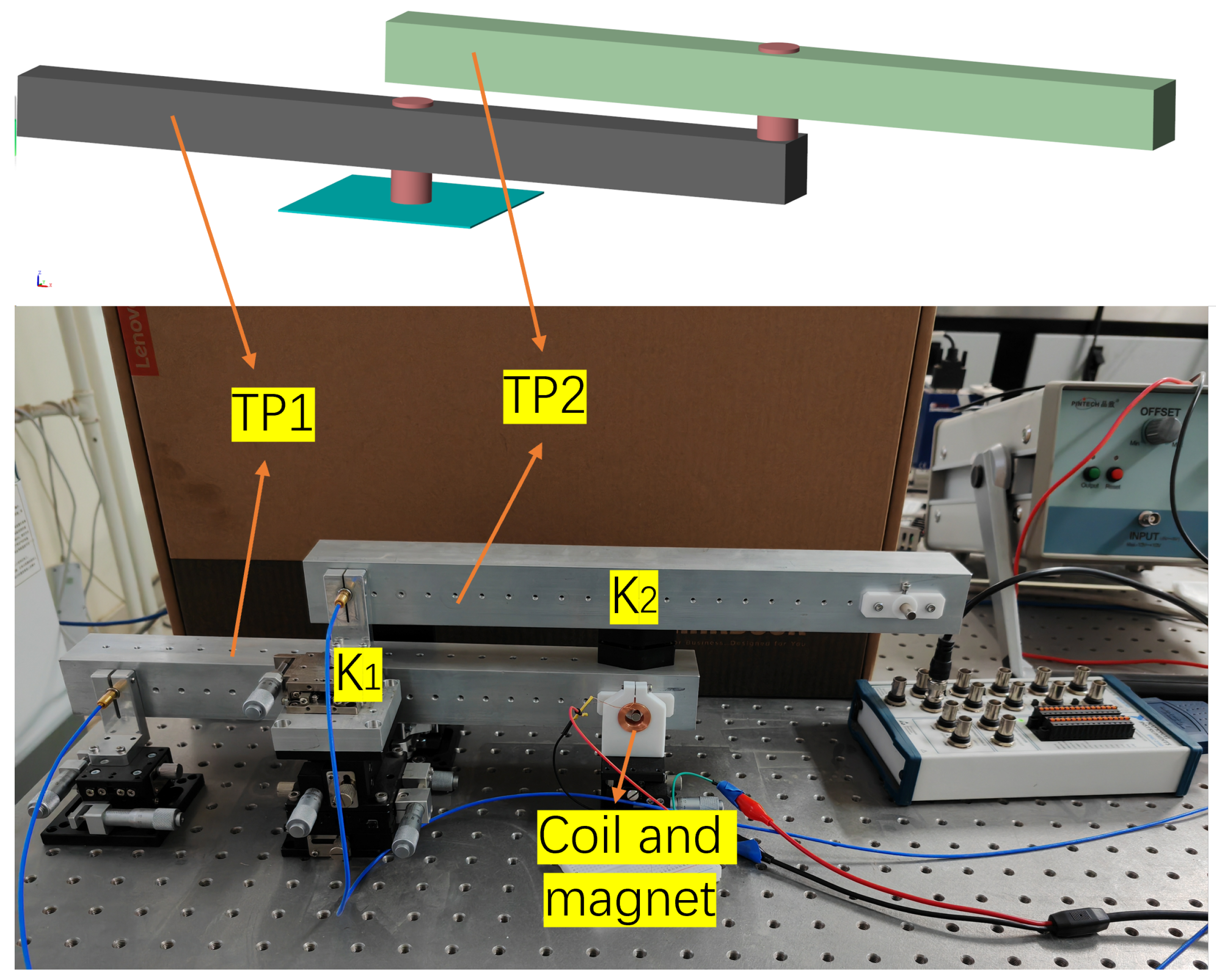
- For the roll coupling of the torsion pendulum microgravity, the design of a baseline leveling mechanism driven by piezoelectric actuator is proposed. The effectiveness of detecting, modulating, and controlling the tilt change of the base is demonstrated through experiments without drag control.
- The platform’s 2D tilt instability and the risk of baseline leveling failure can be reduced by using a two-stage pendulum to separate tilt and thrust. This approach has been preliminary simulated and validated, and will be further tested in future research.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, Y.L.; Luo, Z.R.; Wang, J.Y.; Bai, M.; Zou, Z.M. China’s first step towards probing the expanding universe and the nature of gravity using a space borne gravitational wave antenna. Commun. Phys. 2021, 4, 34. [Google Scholar]
- Loomis, B.D.; Nerem, R.S.; Luthcke, S.B. Simulation study of a follow-on gravity mission to GRACE. J. Geod. 2012, 86, 319–335. [Google Scholar] [CrossRef]
- Hu, Z.; Wang, P.; Deng, J.; Cai, Z.; Wang, Z.; Wang, Z.; Yu, J.; Wu, Y.; Kang, Q.; Li, H.; et al. The drag-free control design and in-orbit experimental results of “Taiji-1”. Int. J. Mod. Phys. A 2021, 36, 2140019. [Google Scholar] [CrossRef]
- Wu, S.; Sun, X.; Zhang, Q.; Xiang, Y. Advances in Frontier Research of Space Gravitational Wave Detection Spacecraft Platform System. J. Deep. Space Explor. 2023, 10, 233–246. [Google Scholar]
- Yu, D.; Niu, X.; Wang, T.; Wang, S.; Zeng, M.; Cui, K.; Liu, H.; Tu, L.; Li, Z.; Huang, X.; et al. The developments of micro propulsion technology based on space gravitational wave detection task. Acta Sci. Nat. Univ. Sunyatseni/Zhongshan Daxue Xuebao 2021, 60, 194–212. [Google Scholar]
- Xu, H.; Mao, Q.; Gao, Y.; Wei, L.; Ding, Y.; Tu, H.; Song, P.; Hu, Z.; Li, Q. A newly designed decoupling method for micro-Newton thrust measurement. Rev. Sci. Instrum. 2023, 94, 014504. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Long, J.; Xu, L.; Cong, L.; Guo, N.; Yang, W. A closed-loop torsional micro-thrust measurement system. Meas. Sci. Technol. 2023, 34, 125028. [Google Scholar] [CrossRef]
- Polk, J.; Pancotti, A.; Haag, T.; King, S.; Walker, M.; Blakely, J.; Ziemer, J. Recommended Practice for Thrust Measurement in Electric Propulsion Testing. J. Propuls. Power 2017, 33, 539–555. [Google Scholar] [CrossRef] [PubMed]
- Anselmo, M.R.; Marques, R.I. Torsional thrust balance for electric propulsion application with electrostatic calibration device. Meas. Sci. Technol. 2019, 30, 055903. [Google Scholar] [CrossRef]
- Mu, J.; Cong, L.; Hu, Q.; Qiao, C. Micro–Newton Thrust Stand Calibration Using Electrostatic Lantern Rings. IEEE Trans. Instrum. Meas. 2023, 72, 1–6. [Google Scholar] [CrossRef]
- Cong, L.; Mu, J.; Long, J.; Bai, S.; Guo, N.; Qiao, C. Experimental study on the response time of microthrust. Acta Mech. Sin. 2023, 39, 123095. [Google Scholar] [CrossRef]
- Ziemer, J.K. Performance measurements using a sub-micronewton resolution thrust stand. In Proceedings of the 27th International Electric Propulsion Conference, Pasadena, CA, USA, 15–19 October 2001; Volume 10. [Google Scholar]
- Trezzolani, F.; Magarotto, M.; Manente, M.; Pavarin, D. Development of a counterbalanced pendulum thrust stand for electric propulsion. Measurement 2018, 122, 494–501. [Google Scholar] [CrossRef]
- Gilpin, M.R.; McGehee, W.A.; Arnold, N.I.; Natisin, M.R.; Holley, Z.A. Dual-axis thrust stand for the direct characterization of electrospray performance. Rev. Sci. Instrum. 2022, 93, 065102. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, D.; Yang, Y. Design and Experimental Validation of a Micro–Newton Torsional Thrust Balance for Ionic Liquid Electrospray Thruster. Aerospace 2022, 9, 545. [Google Scholar] [CrossRef]
- Mahmood, K.; Ismail, N.A. Application of multibody simulation tool for dynamical analysis of tethered aerostat. J. King Saud Univ. Eng. Sci. 2022, 34, 209–216. [Google Scholar] [CrossRef]
- Cong, L.; Mu, J.; Liu, Q.; Wang, H.; Wang, L.; Li, Y.; Qiao, C. Thermal noise decoupling of micro-Newton thrust measured in a torsion balance. Symmetry 2021, 13, 1357. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Stress, Vibration, and Wave Analysis in Aerospace Composites: SHM and NDE Applications; Academic Press: Cambridge, MA, USA, 2022. [Google Scholar]
- Xu, H.; Gao, Y.; Mao, Q.B.; Ye, L.W.; Hu, Z.K.; Zhang, K.; Song, P.; Li, Q. A compound pendulum for thrust measurement of micro-Newton thruster. Rev. Sci. Instrum. 2022, 93, 064501. [Google Scholar] [CrossRef] [PubMed]
- Lundberg, K.H.; Barton, T.W. History of inverted-pendulum systems. IFAC Proc. Vol. 2010, 42, 131–135. [Google Scholar] [CrossRef]
- Heinzel, G.; Wand, V.; García, A.; Jennrich, O.P.; Braxmaier, C.; Robertson, D.; Middleton, K.; Hoyland, D.; Rüdiger, A.; Schilling, R. The LTP interferometer and phasemeter. Class. Quantum Grav. 2004, 21, S581–S587. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cong, L.; Wang, J.; Long, J.; Mu, J.; Deng, H.; Qiao, C. Microgravity Decoupling in Torsion Pendulum for Enhanced Micro-Newton Thrust Measurement. Appl. Sci. 2024, 14, 91. https://doi.org/10.3390/app14010091
Cong L, Wang J, Long J, Mu J, Deng H, Qiao C. Microgravity Decoupling in Torsion Pendulum for Enhanced Micro-Newton Thrust Measurement. Applied Sciences. 2024; 14(1):91. https://doi.org/10.3390/app14010091
Chicago/Turabian StyleCong, Linxiao, Jiabin Wang, Jianfei Long, Jianchao Mu, Haoye Deng, and Congfeng Qiao. 2024. "Microgravity Decoupling in Torsion Pendulum for Enhanced Micro-Newton Thrust Measurement" Applied Sciences 14, no. 1: 91. https://doi.org/10.3390/app14010091
APA StyleCong, L., Wang, J., Long, J., Mu, J., Deng, H., & Qiao, C. (2024). Microgravity Decoupling in Torsion Pendulum for Enhanced Micro-Newton Thrust Measurement. Applied Sciences, 14(1), 91. https://doi.org/10.3390/app14010091