
Risk of Tree Fall on High-Traffic Roads: A Case Study of the S6 in Poland

 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
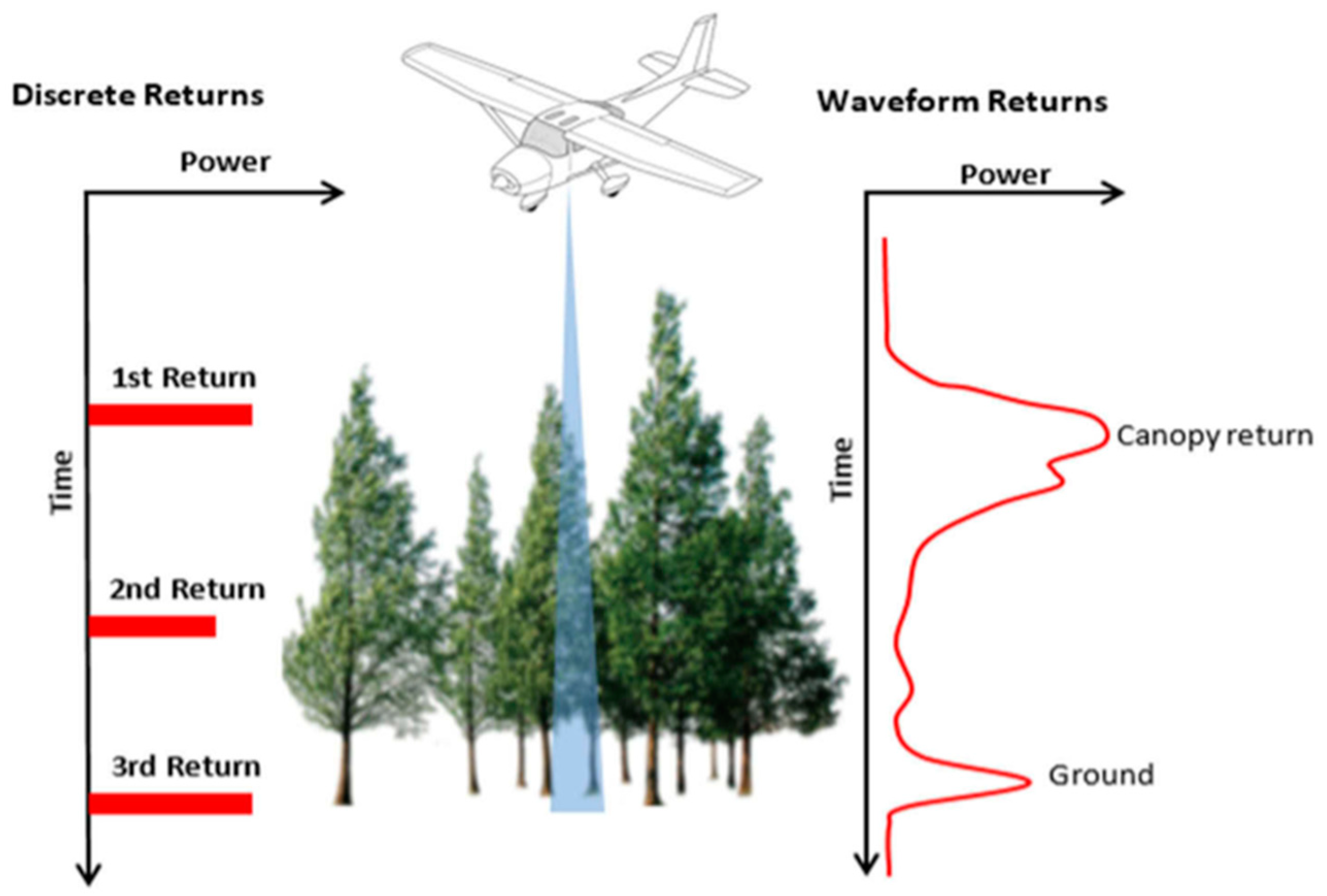
2.1. Airborne Laser Scanning
- Oscillating mirror—Creates a characteristic zigzag pattern on the surface. The distances between laser points in the scan line are variable values, resulting from the mirror’s constant acceleration and deceleration. Larger distances between points occur in the middle part of the lane, while they are smaller at the end of the lane, where the direction of the mirror’s movement changes.
- Spinning polygon—Points are created only when scanning in one direction, forming parallel scan lines with a uniform distribution of points over the measured area.
- Palmer scanner—The laser beam deflecting device is designed so that the mirror surface and axis of rotation form an angle other than 90°. Systems based on Palmer scanning for aerial systems achieve an elliptical pattern on the ground.
- Fiber-optic system—A laser beam is directed through a rotating mirror onto a bundle of optical fibers, outputting energy in the form of a line perpendicular to the flight.
2.2. Characteristics of the Data and Test Object
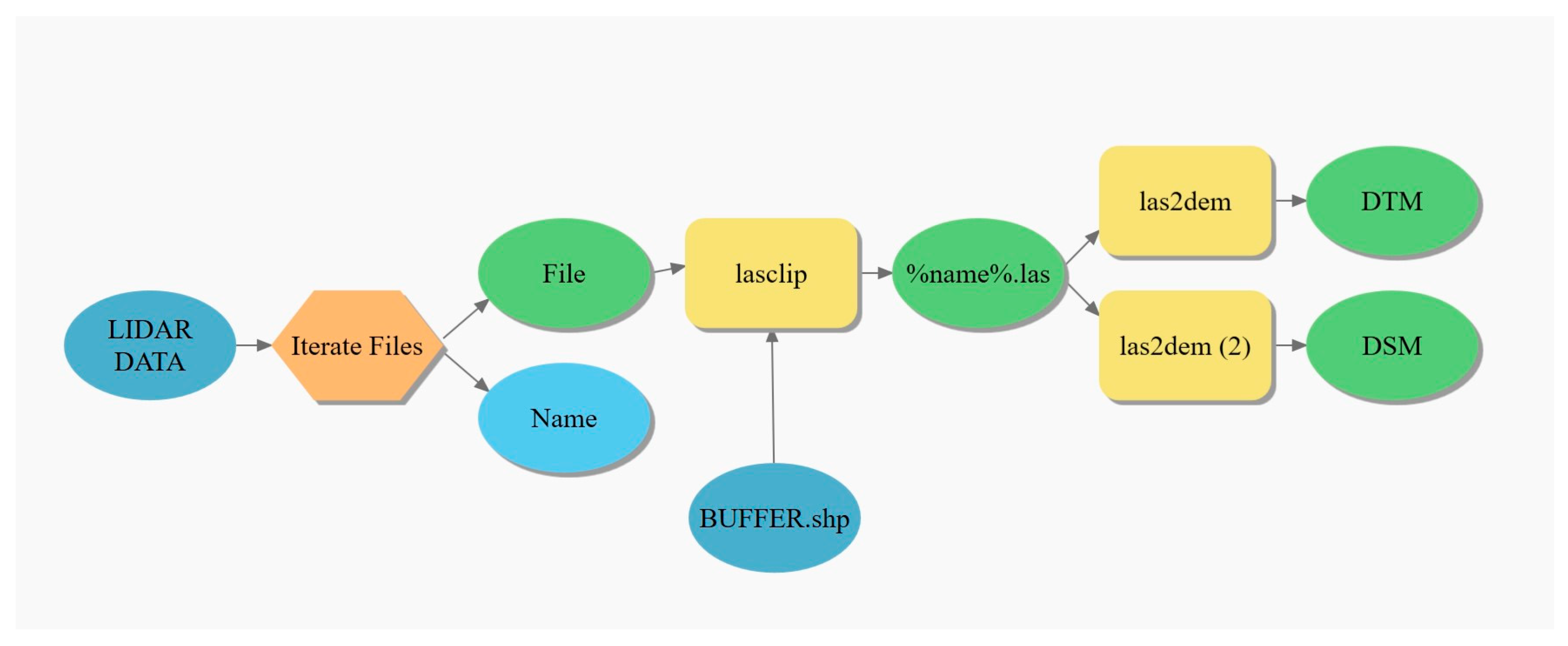
2.3. Data Preparation
- Creation of a buffer area around the vector representing the road axis, taking into account the actual width of the road, and use of this buffer to create an additional area with a radius of 40 m to define the scope of the analysis.
- Reducing the LiDAR dataset using the LASTools package integrated with ArcGIS PRO software. The lasclip tool was used to reduce the amount of these data in the analysis area.
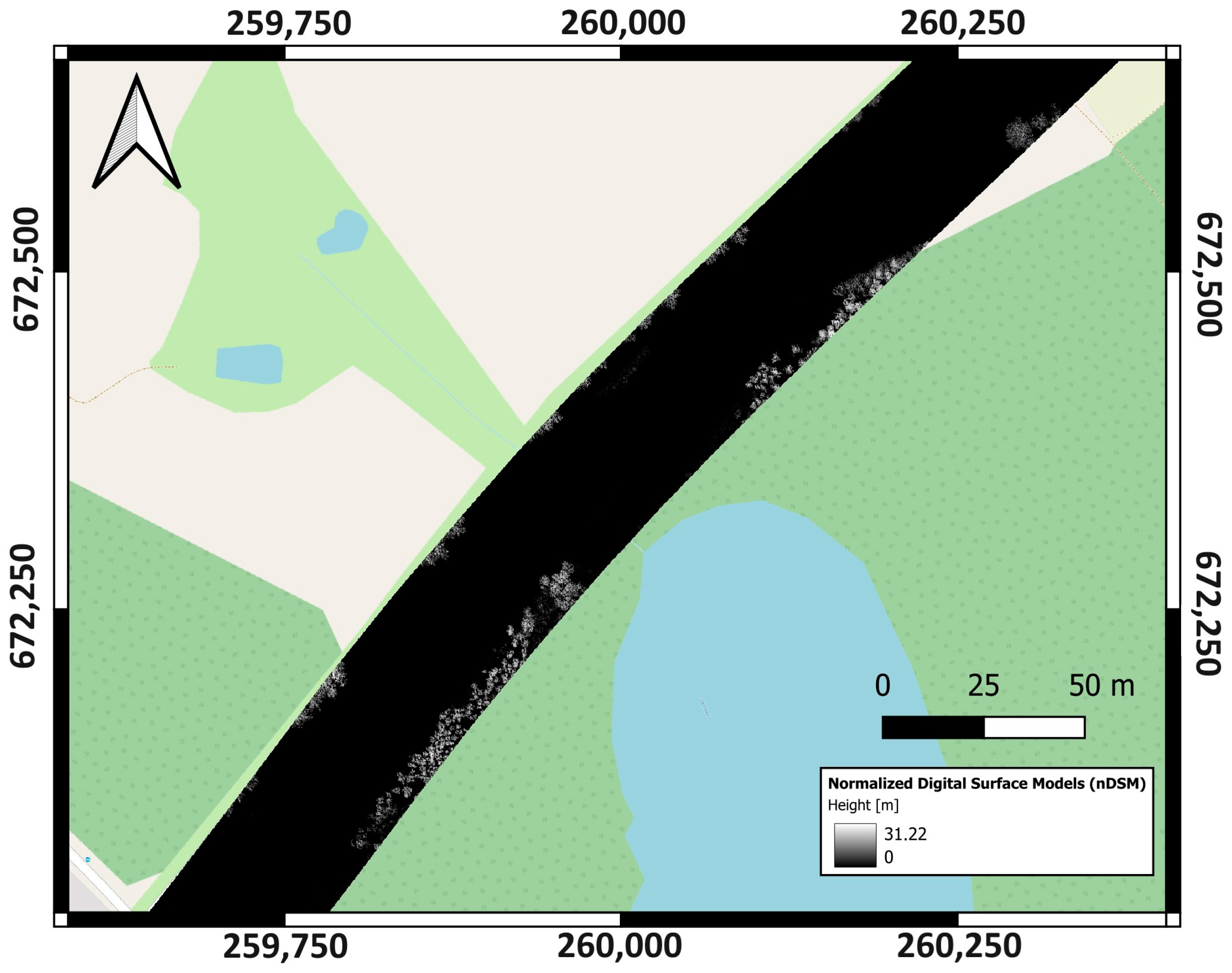
- Using the las2dem tool to generate Numerical Terrain Models and Numerical Land Cover Models, with a resolution of 0.25 m and 1 m based on previously constrained LiDAR data. The models differ in the parameter concerning the selection of the point class on which the model is generated. The DTM was created only on the ground class, while the DSM considered only the first reflections from all analyzed classes.
- nDSM—normalized digital surface model;
- DSM—digital surface model;
- DTM—digital terrain model.
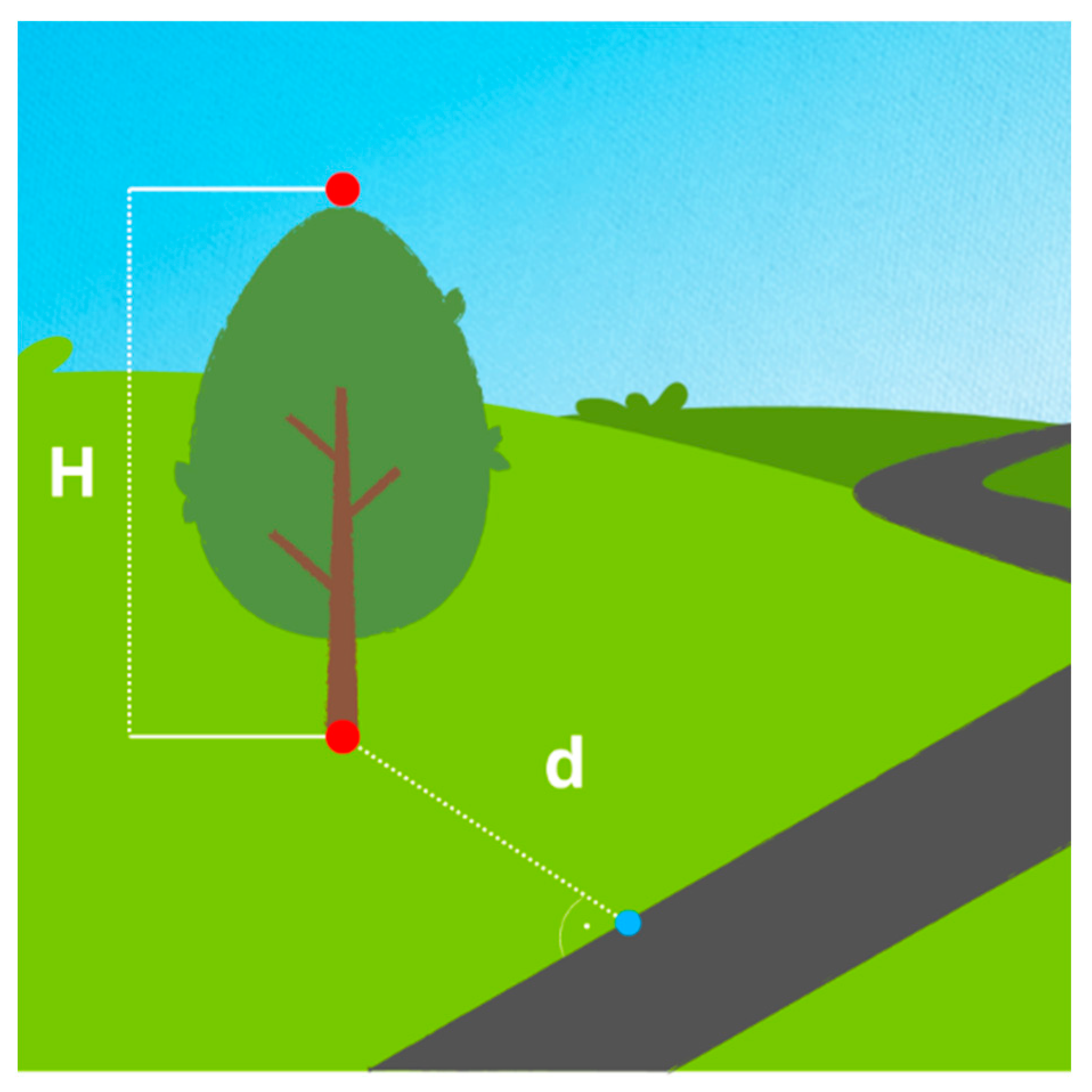
2.4. Determination of the Points of Fall of a Potential Windthrow on the Road
- H—tree height;
- NEAR_DIST—the closest distance between the road and the position of the tree.
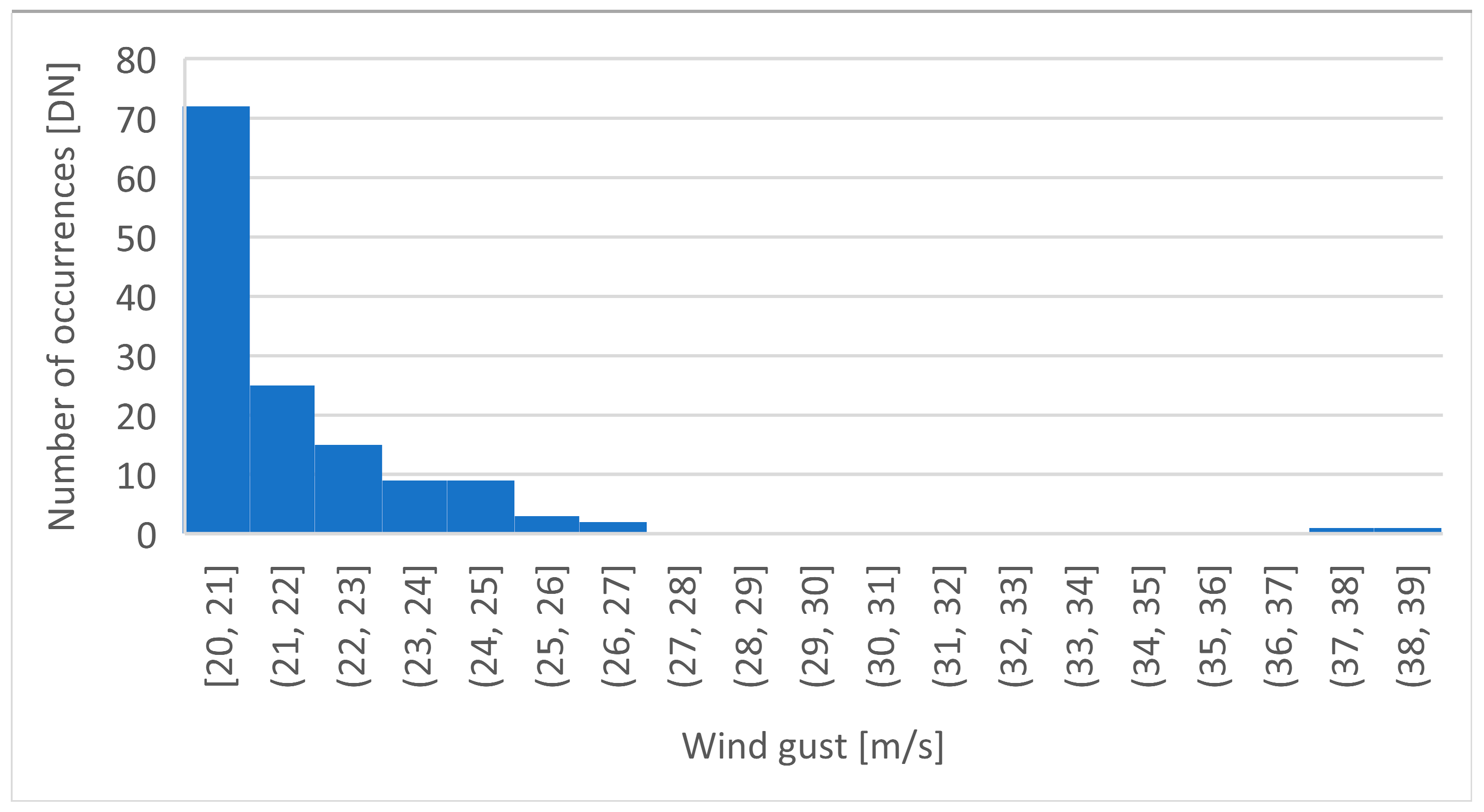
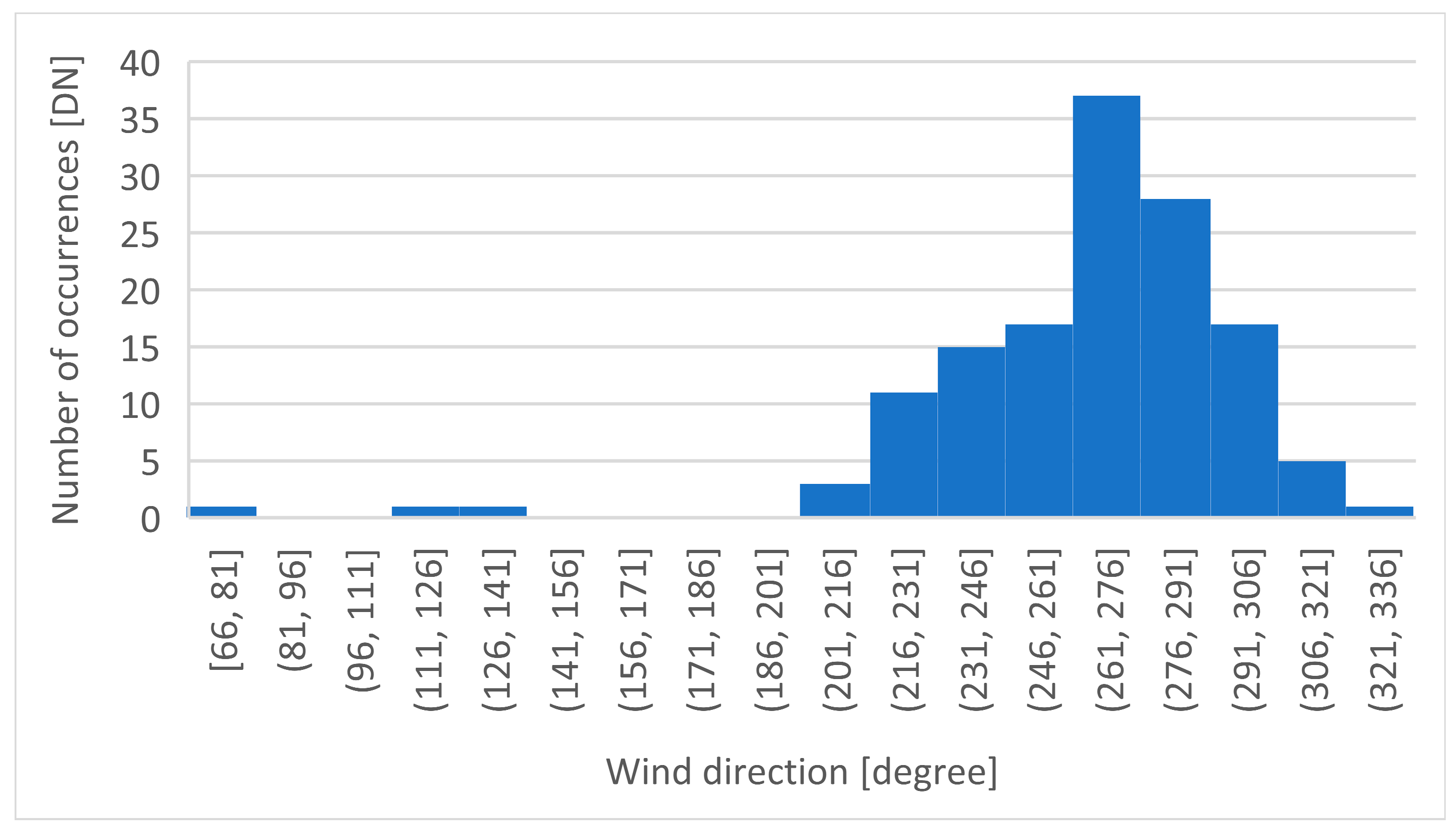
2.5. Winds Model
- Northern (N, 360°): od 338° do 22°;
- Northeastern (NE, 45°): od 23° do 67°;
- Eastern (E, 90°): od 68° do 112°;
- Southeastern (SE, 135°): od 113° do 157°;
- Southern (S, 180°): od 158° do 202°;
- Southwestern (SW, 225°): od 203° do 247°;
- Western (W, 270°): od 248° do 292°;
- Northwestern (NW, 315°): od 293° do 337°.
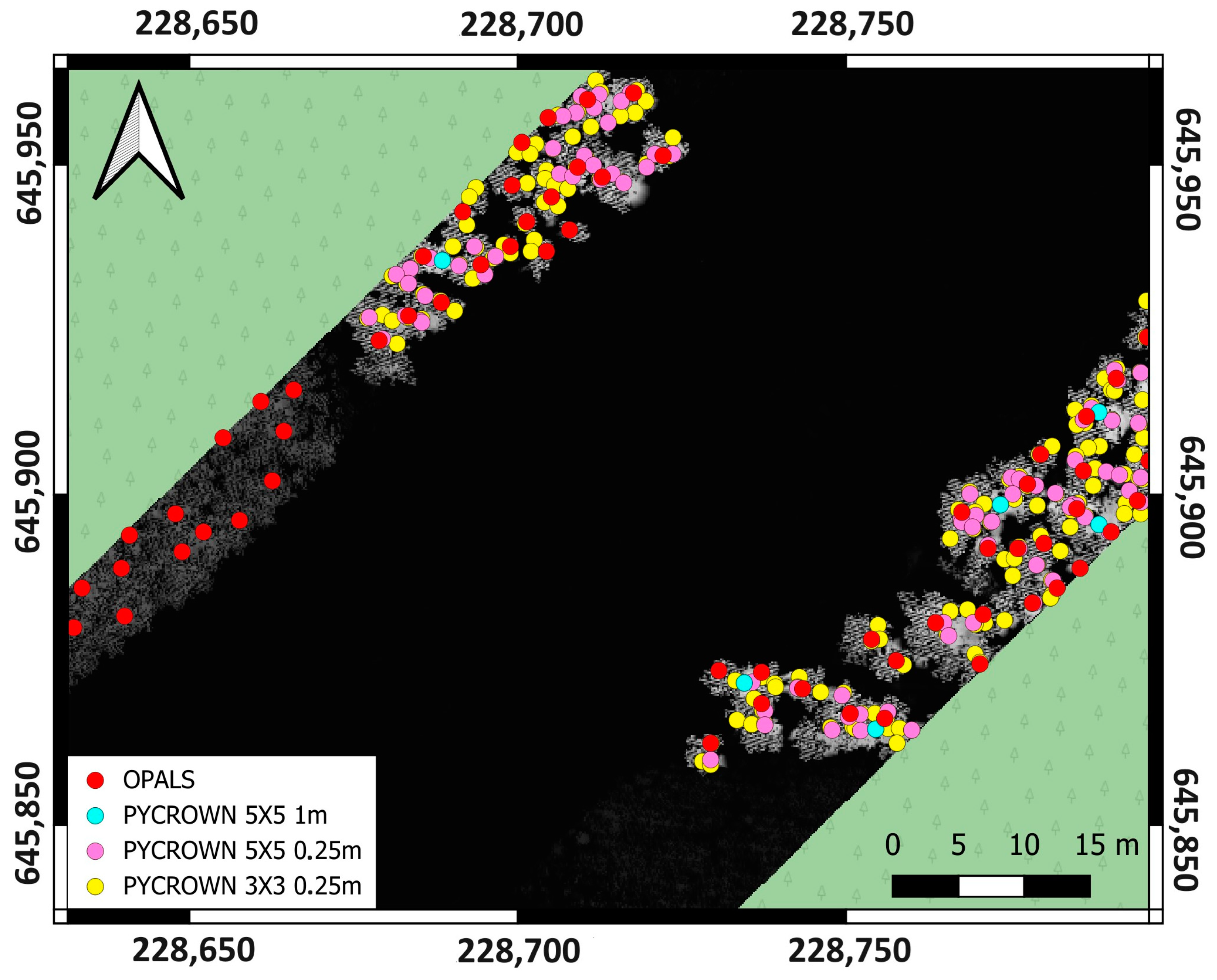
3. Results and Discussion
- OPALS with resolution of 0.25 m;
- PyCrown with a resolution of 0.25 m and 3 × 3 median filter;
- PyCrown with a resolution of 0.25 m and 5 × 5 median filter;
- PyCrown with a resolution of 1 m and 5 × 5 median filter.
- Direction determined based on median;
- Direction selected for maximum gust;
- Direction determined by the entire range selected from the histogram.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wagner, W.; Ulrich, A.; Melzer, T.; Briese, C.; Kraus, K. From Single-Pulse to Full-Waveform Airborne Laser Scanners: Potential and Practical Challenges. Int. Arch. Photogramm. Remote Sens. Geoinf. Sci. 2004, 35, 414–419. [Google Scholar]
- Zhou, Q. Digital Elevation Model and Digital Surface Model. In International Encyclopedia of Geography; Richardson, D., Castree, N., Goodchild, M.F., Kobayashi, A., Liu, W., Marston, R.A., Eds.; Wiley: Hoboken, NJ, USA, 2017; pp. 1–17. ISBN 978-0-470-65963-2. [Google Scholar]
- Zhou, Q.; Zhu, A.-X. The Recent Advancement in Digital Terrain Analysis and Modeling. Int. J. Geogr. Inf. Sci. 2013, 27, 1269–1271. [Google Scholar] [CrossRef]
- Hu, L.; He, Z.; Liu, J.; Zheng, C. Method for Measuring the Information Content of Terrain from Digital Elevation Models. Entropy 2015, 17, 7021–7051. [Google Scholar] [CrossRef]
- Ahmad, F.; Goparaju, L.; Qayum, D.A. Natural Resource Mapping Using Landsat and Lidar towards Identifying Digital Elevation, Digital Surface and Canopy Height Models. Int. J. Environ. Sci. Nat. Resour. 2017, 2, 8. [Google Scholar]
- Gdulová, K.; Marešová, J.; Barták, V.; Szostak, M.; Červenka, J.; Moudrý, V. Use of TanDEM-X and SRTM-C Data for Detection of Deforestation Caused by Bark Beetle in Central European Mountains. Remote Sens. 2021, 13, 3042. [Google Scholar] [CrossRef]
- Szostak, M. Automated Land Cover Change Detection and Forest Succession Monitoring Using LiDAR Point Clouds and GIS Analyses. Geosciences 2020, 10, 321. [Google Scholar] [CrossRef]
- Khosravipour, A.; Skidmore, A.K.; Wang, T.; Isenburg, M.; Khoshelham, K. Effect of Slope on Treetop Detection Using a LiDAR Canopy Height Model. ISPRS J. Photogramm. Remote Sens. 2015, 104, 44–52. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A Photogrammetric Workflow for the Creation of a Forest Canopy Height Model from Small Unmanned Aerial System Imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef]
- Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.T.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef]
- Mielcarek, M.; Stereńczak, K.; Khosravipour, A. Testing and Evaluating Different LiDAR-Derived Canopy Height Model Generation Methods for Tree Height Estimation. Int. J. Appl. Earth Obs. Geoinf. 2018, 71, 132–143. [Google Scholar] [CrossRef]
- Socha, J.; Hawryło, P.; Pierzchalski, M.; Stereńczak, K.; Krok, G.; Wężyk, P.; Tymińska-Czabańska, L. An Allometric Area-Based Approach—A Cost-Effective Method for Stand Volume Estimation Based on ALS and NFI Data. For. Int. J. For. Res. 2020, 93, 344–358. [Google Scholar] [CrossRef]
- Cosenza, D.; Vogel, J.; Broadbent, E.; Silva, C. Silvicultural Experiment Assessment Using Lidar Data Collected from an Unmanned Aerial Vehicle. For. Ecol. Manag. 2022, 522, 120489. [Google Scholar] [CrossRef]
- Hawryło, P.; Francini, S.; Chirici, G.; Giannetti, F.; Parkitna, K.; Krok, G.; Mitelsztedt, K.; Lisańczuk, M.; Stereńczak, K.; Ciesielski, M.; et al. The Use of Remotely Sensed Data and Polish NFI Plots for Prediction of Growing Stock Volume Using Different Predictive Methods. Remote Sens. 2020, 12, 3331. [Google Scholar] [CrossRef]
- Georgopoulos, N.; Gitas, I.Z.; Korhonen, L.; Antoniadis, K.; Stefanidou, A. Estimating Crown Biomass in a Multilayered Fir Forest Using Airborne LiDAR Data. Remote Sens. 2023, 15, 2919. [Google Scholar] [CrossRef]
- Chen, S.; Chen, M.; Zhao, B.; Mao, T.; Wu, J.; Bao, W. Urban Tree Canopy Mapping Based on Double-Branch Convolutional Neural Network and Multi-Temporal High Spatial Resolution Satellite Imagery. Remote Sens. 2023, 15, 765. [Google Scholar] [CrossRef]
- Falkowski, M.; Smith, A.; Gessler, P.; Hudak, A.; Vierling, L.; Evans, J. The Influence of Conifer Forest Canopy Cover on the Accuracy of Two Individual Tree Measurement Algorithms Using Lidar Data. Can. J. Remote Sens. 2008, 34, S338–S350. [Google Scholar] [CrossRef]
- Sparks, A.M.; Smith, A.M.S. Accuracy of a LiDAR-Based Individual Tree Detection and Attribute Measurement Algorithm Developed to Inform Forest Products Supply Chain and Resource Management. Forests 2022, 13, 3. [Google Scholar] [CrossRef]
- Zörner, J.; Dymond, J.; Shepherd, J.; Jolly, B. PyCrown—Fast Raster-Based Individual Tree Segmentation for LiDAR Data; Landcare Research Ltd.: Lincoln, New Zealand, 2018. [Google Scholar]
- Hawryło, P.; Socha, J.; Wężyk, P.; Ochał, W.; Krawczyk, W.; Miszczyszyn, J.; Tymińska-Czabańska, L. How to Adequately Determine the Top Height of Forest Stands Based on Airborne Laser Scanning Point Clouds? For. Ecol. Manag. 2024, 551, 121528. [Google Scholar] [CrossRef]
- Hyyppa, J.; Kelle, O.; Lehikoinen, M.; Inkinen, M. A Segmentation-Based Method to Retrieve Stem Volume Estimates from 3-D Tree Height Models Produced by Laser Scanners. IEEE Trans. Geosci. Remote Sens. 2001, 39, 969–975. [Google Scholar] [CrossRef]
- Lisiewicz, M.; Kamińska, A.; Stereńczak, K. Recognition of Specified Errors of Individual Tree Detection Methods Based on Canopy Height Model. Remote Sens. Appl. Soc. Environ. 2022, 25, 100690. [Google Scholar] [CrossRef]
- Dalponte, M.; Coomes, D.A. Tree-Centric Mapping of Forest Carbon Density from Airborne Laser Scanning and Hyperspectral Data. Methods Ecol. Evol. 2016, 7, 1236–1245. [Google Scholar] [CrossRef]
- Wulder, M.; Niemann, K.O.; Goodenough, D.G. Local Maximum Filtering for the Extraction of Tree Locations and Basal Area from High Spatial Resolution Imagery. Remote Sens. Environ. 2000, 73, 103–114. [Google Scholar] [CrossRef]
- Kto Ocenia Stan Drzew Przy Drogach Krajowych?—Generalna Dyrekcja Dróg Krajowych i Autostrad-Oddział Łódź—Portal Gov.pl. Available online: https://www.gov.pl/web/gddkia-lodz/kto-ocenia-stan-drzew-przy-drogach-krajowych (accessed on 24 April 2024).
- Kankare, V. The Prediction of Single-Tree Biomass, Logging Recoveries and Quality Attributes with Laser Scanning Techniques. Diss. For. 2015, 2015, 49. [Google Scholar] [CrossRef]
- Tomczak, A.; Stępień, G.; Abramowski, T.; Bejger, A. Subsea Wellhead Spud-in Marking and as-Built Position Estimation Method Based on Ultra-Short Baseline Acoustic Positioning. Measurement 2022, 195, 111155. [Google Scholar] [CrossRef]
- van der Schriek, M.; Beex, W. The Application of LiDAR-Based DEMs on WWII Conflict Sites in the Netherlands. J. Confl. Archaeol. 2018, 12, 94–114. [Google Scholar] [CrossRef]
- Kukko, A.; Hyyppä, J. Laser Scanner Simulator for System Analysis and Algorithm Development: A Case with Forest Measurements. Int. Soc. Photogramm. Remote Sens. ISPRS 2012, 36, 234–240. [Google Scholar]
- Riczu, P.; Tamás, J.; Nagy, A.; Fórián, T.; Nagy, G.; Jancsó, T.; Nyéki, J. 3D Laser Scanning and Modeling of Single Trees in Karcag Research Center. Analele Univ. Oradea Fasc. Protecția Mediu. 2011, 17, 277–284. [Google Scholar]
- Bakuła, K. Multispectral Airborne Laser Scanning—A New Trend in the Development of LiDAR Technology. Arch. Fotogram. Kartogr. I Teledetekcji 2015, 27, 25–44. [Google Scholar]
- Pyrchla, K.; Tomczak, A.; Zaniewicz, G.; Pyrchla, J.; Kowalska, P. Analysis of the Dynamic Height Distribution at the Estuary of the Odra River Based on Gravimetric Measurements Acquired with the Use of a Light Survey Boat—A Case Study. Sensors 2020, 20, 6044. [Google Scholar] [CrossRef]
- Kogut, T.; Bakuła, K. Improvement of Full Waveform Airborne Laser Bathymetry Data Processing Based on Waves of Neighborhood Points. Remote Sens. 2019, 11, 1255. [Google Scholar] [CrossRef]
- Salas, E.A.L. Waveform LiDAR Concepts and Applications for Potential Vegetation Phenology Monitoring and Modeling: A Comprehensive Review. Geo-Spat. Inf. Sci. 2021, 24, 179–200. [Google Scholar] [CrossRef]
- Geoportal.gov.pl—Geoportal Infrastruktury Informacji Przestrzennej. Available online: https://www.geoportal.gov.pl/ (accessed on 24 April 2024).
- LASer (LAS) File Format Exchange Activities—ASPRS. Available online: https://www.asprs.org/divisions-committees/lidar-division/laser-las-file-format-exchange-activities (accessed on 24 April 2024).
- Illarionova, S.; Shadrin, D.; Ignatiev, V.; Shayakhmetov, S.; Trekin, A.; Oseledets, I. Estimation of the Canopy Height Model from Multispectral Satellite Imagery with Convolutional Neural Networks. IEEE Access 2022, 10, 34116–34132. [Google Scholar] [CrossRef]
- Pfeifer, N.; Mandlburger, G.; Otepka, J.; Karel, W. OPALS—A Framework for Airborne Laser Scanning Data Analysis. Comput. Environ. Urban Syst. 2014, 45, 125–136. [Google Scholar] [CrossRef]
- Allen, A.; Cardoso, A.; Wiatr, A.; Machado, C.; Paterlini, W.; Baker, J. Influence of Intensive Agriculture on Dry Deposition of Aerosol Nutrients. Artic. J. Braz. Chem. Soc 2010, 21, 87–97. [Google Scholar] [CrossRef]
- Poddaeva, O.; Fedosova, A. Extreme Wind Speeds Analysis Using Extended Wind Rose Based on Statistic Methods. Energy Rep. 2022, 8, 1177–1184. [Google Scholar] [CrossRef]
- Zięba-Kulawik, K.; Wężyk, P. Safe Trail—GIS Analyzes of Risk on Tourist Trails Based on PlanetScope and LiDAR Satellite Imagery. 2018. 4th Scientific Conference—“Nature for Man. Man for Nature” 2018. Available online: https://karolinaannazieba.wixsite.com/phd-labgeo/single-post/2014/05/02/life-at-16000-feet (accessed on 30 April 2024).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Description |
|---|---|
| 0 | points processed but not classified, |
| 2 | points lying on the ground |
| 3 | points representing low vegetation, i.e., in the range of 0–0.40 m |
| 4 | points representing average vegetation, i.e., in the range of 0.40–2.00 m |
| 5 | points representing high vegetation, i.e., in the range above 2.00 m |
| 6 | points representing buildings, constructions, and engineering structures |
| 7 | noise |
| 8 | points representing water areas |
| 12 | points from multiple coverage areas |
| Level | Danger | Average 10 Min Wind Speed | Wind Gust Speed | Description of Levels |
|---|---|---|---|---|
| 3 | VERY HIGH RISK | >90 km/h (>25 m/s) | >115 km/h (>32 m/s) | Hurricane-force winds—cause destruction of entire buildings and flat-roofed structures, tear sections of industrial power lines and break their support structures, hinder vehicle travel, and uproot trees with their roots, causing windfall. |
| 2 | HIGH RISK | 72 km/h–90 km/h (20 m/s–25 m/s) | 90 km/h–115 km/s (25 m/s–32 m/s) | Strong gale—the wind can cause significant damage to buildings, break and uproot shallow-rooted trees, sway power line cables, and during settling or freezing rain, it can snap them due to overload. |
| 1 | MODERATE RISK | 54 km/h–72 km/h (15 m/s–20 m/s) | 72 km/h–90 km/s (20 m/s–25 m/s) | Gale—the wind overturns wooden fences, billboards, and road signs, can cause damage to buildings, tears off individual roof tiles, and breaks large tree branches. During snowfall, it causes snowdrifts and snowstorms. |
| 0 | NORMAL STATE | No forecast of strong winds. | ||
| OPALS | PyCrown | PyCrown | PyCrown | |
|---|---|---|---|---|
| Raster resolution [m] | 0.25 | 0.25 | 0.25 | 1 |
| Filter used | Adjusted automatically | 3 × 3 | 5 × 5 | 5 × 5 |
| Number of trees detected | 9 305 | 11,667 | 6244 | 366 |
| Detection efficiency | 74% | 53% | 61% | 4% |
| OPALS | PyCrown | PyCrown | PyCrown | |
|---|---|---|---|---|
| Raster resolution [m] | 0.25 | 0.25 | 0.25 | 1 |
| Filter used | Adjusted automatically | 3 × 3 | 5 × 5 | 5 × 5 |
| Number of trees detected | 9110 (−195) | 11,582 (−85) | 6209 (−35) | 364 (−2) |
| OPALS | PyCrown 3 × 3 | PyCrown 5 × 5 | PyCrown 1M | |
|---|---|---|---|---|
| Number of trees posing a threat | 1460 | 2126 | 1083 | 49 |
| OPALS | PyCrown 3 × 3 | PyCrown 5 × 5 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Detected by Algorithm | Manual Validation | % of Correctly Detected Trees | Detected by algorithm | Manual Validation | % of Correctly Detected Trees | Detected by Algorithm | Manual Validation | % of Correctly Detected Trees | |
| Median | 140 | 114 | 81.4 | 104 | 72 | 69.2 | 53 | 48 | 90.6 |
| Histogram | 318 | 261 | 82.1 | 340 | 230 | 67.6 | 152 | 125 | 82.2 |
| Maximum gust | 577 | 501 | 86.8 | 1070 | 555 | 51.9 | 552 | 423 | 76.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kogut, T.; Wancel, D.; Stępień, G.; Smuga-Kogut, M.; Szostak, M.; Całka, B. Risk of Tree Fall on High-Traffic Roads: A Case Study of the S6 in Poland. Appl. Sci. 2024, 14, 4479. https://doi.org/10.3390/app14114479
Kogut T, Wancel D, Stępień G, Smuga-Kogut M, Szostak M, Całka B. Risk of Tree Fall on High-Traffic Roads: A Case Study of the S6 in Poland. Applied Sciences. 2024; 14(11):4479. https://doi.org/10.3390/app14114479
Chicago/Turabian StyleKogut, Tomasz, Dagmara Wancel, Grzegorz Stępień, Małgorzata Smuga-Kogut, Marta Szostak, and Beata Całka. 2024. "Risk of Tree Fall on High-Traffic Roads: A Case Study of the S6 in Poland" Applied Sciences 14, no. 11: 4479. https://doi.org/10.3390/app14114479