
Modeling of Lane Changing Behavior of Connected Driving Based on Vehicle Interaction Potential
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Research of Vehicle Interaction Potential Based on Lennard-Jones Potential
2.1. Vehicle Interaction Potential Based on Lennard-Jones Potential
2.2. Vehicle Potential Field Distribution under Different States
- (1)
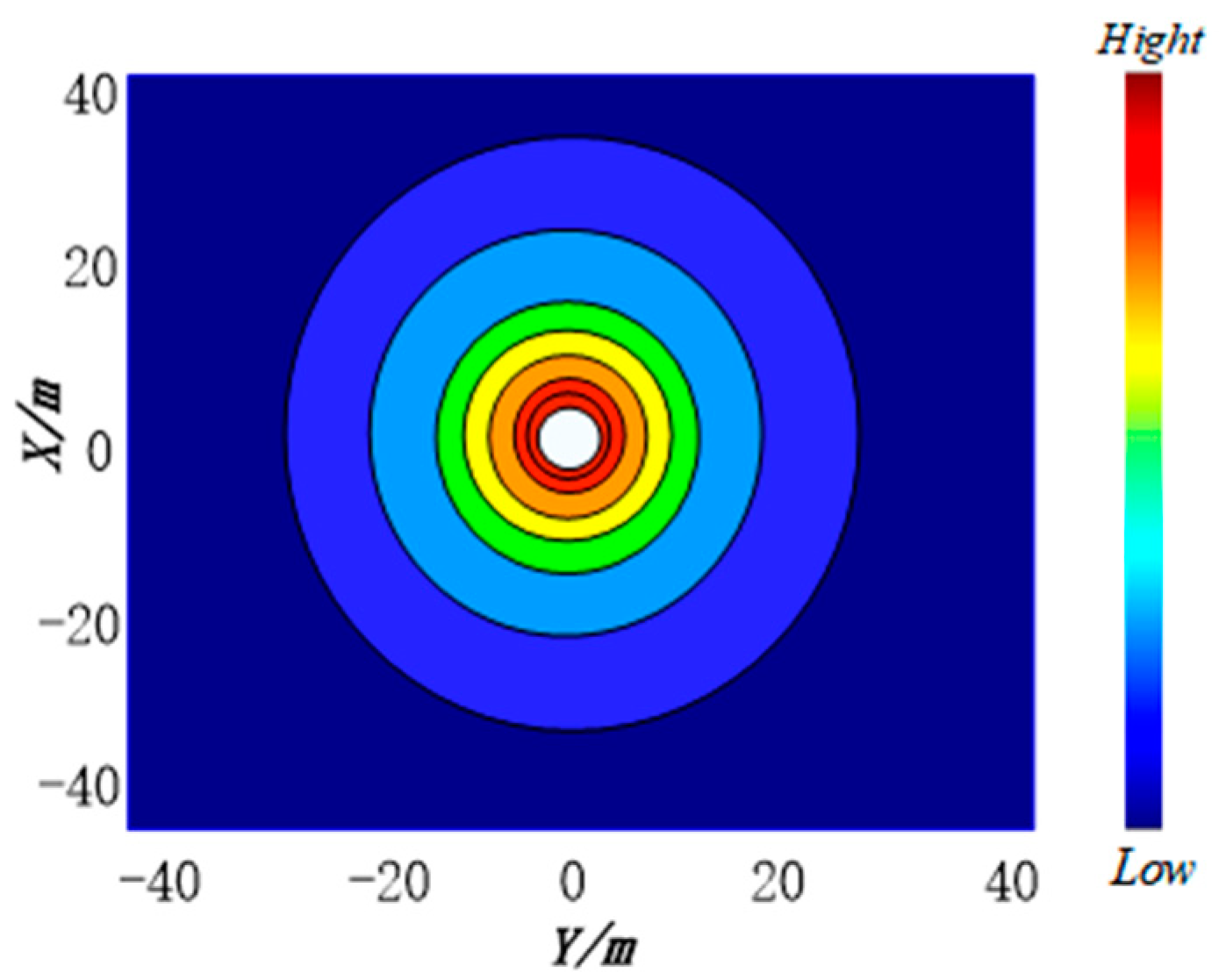
- Static state. Figure 3a shows the vehicle at rest, when the vehicle is equivalent to a stationary obstacle. Because the risk of approaching the vehicle from the front and rear is greater than that of approaching the vehicle from the side, the distance is corrected in this paper, so the potential field as a whole is oval.
- (2)
- State of uniform velocity. Figure 3b,c show the scene when the vehicle is traveling at a constant speed and along the axes . comparing Figure 3b,c, it can be found that the potential field increases with the increase in speed in the direction of the vehicle. This also well reflects that the vehicle at high speed has a larger risk range for interactive vehicles than that at low speed. Therefore, the potential field as a whole presents an oval shape elongated along the direction of vehicle motion.
- (3)
- Accelerated state. Figure 3d,e show a vehicle with a speed of accelerating along the axes with and accelerations, respectively. By comparison with Figure 3b, it can be found that the potential field of the vehicle presents an obvious forward-leaning phenomenon under accelerated motion. This means that the risk to the vehicle in front of the vehicle is significantly greater than that of the vehicle behind, so the required safety distance in front of the vehicle should be greater than that behind the vehicle. By comparing Figure 3d,e, it can be found that with the increase in acceleration, the degree of forward tilt of the vehicle potential field increases. It indicates that the greater the acceleration of the vehicle, the greater the risk to the front.
- (4)
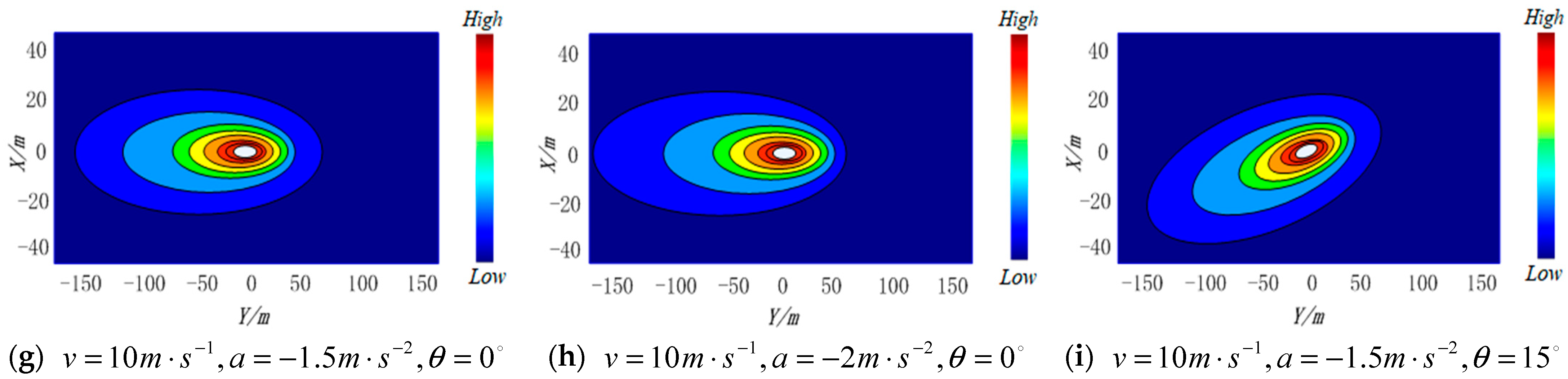
- Deceleration state. Figure 3g,h shows the scenario of a vehicle with a speed of decelerating along an axis with an acceleration of and , respectively. By comparison with Figure 3b, it can be found that the potential field of the vehicle shows an obvious backward tilt in the decelerating motion state. This means that the vehicle poses a significantly greater risk to the vehicle behind than to the vehicle in front. So the required safety distance behind the vehicle should be greater. By comparing Figure 3g,h, it can be seen that the potential field of the vehicle increases with the increase in the deceleration value, that is, the risk degree of the rear vehicle increases with the increase in the deceleration speed. Therefore, in the network environment, when the rear vehicle obtains the deceleration information of the front vehicle, it can decelerate in advance to improve driving safety.
- (5)
- Turning state. Figure 3f,i show the vehicle turning to the left while accelerating and decelerating, respectively. By comparing Figure 3e,h, it can be found that the vehicle potential field as a whole shifts with the steering angle when the vehicle is turning. Therefore, when studying lane changing, it is necessary to consider the influence of the steering angle on the vehicle potential field, which is also in line with the previous revision of vehicle potential field.
3. Acceptable Clearance for Lane Changing
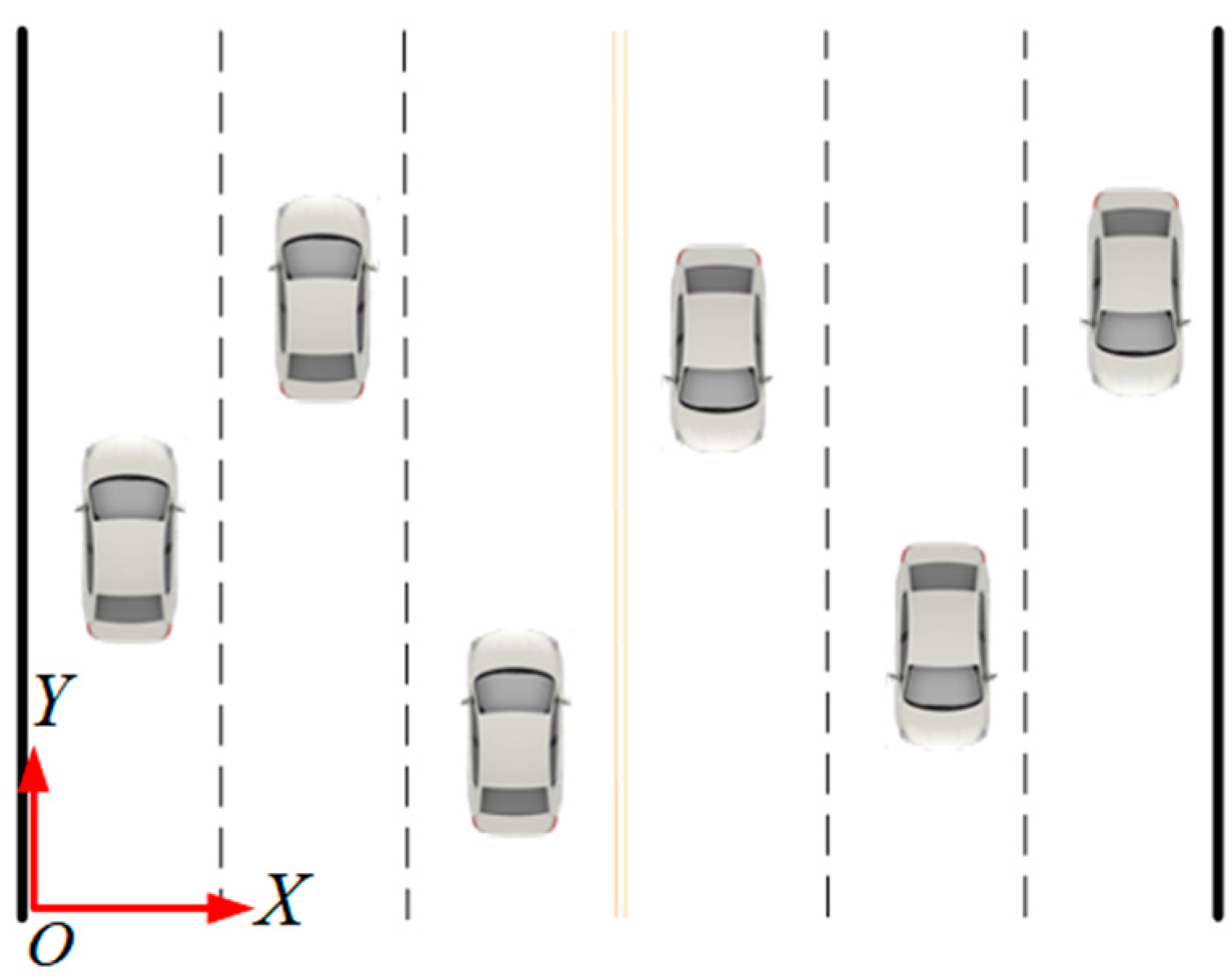
3.1. Study the Setting of the Lane Changing Scene
- (1)
- The overall running speed of the target lane is better than that of the current lane, which meets the speed space advantage in lane changing conditions;
- (2)
- The lane changing vehicle remains in the same state during the lane changing process;
- (3)
- The influence of steering angle on speed is ignored.
3.2. Research on Acceptable Clearance of Lane Changing
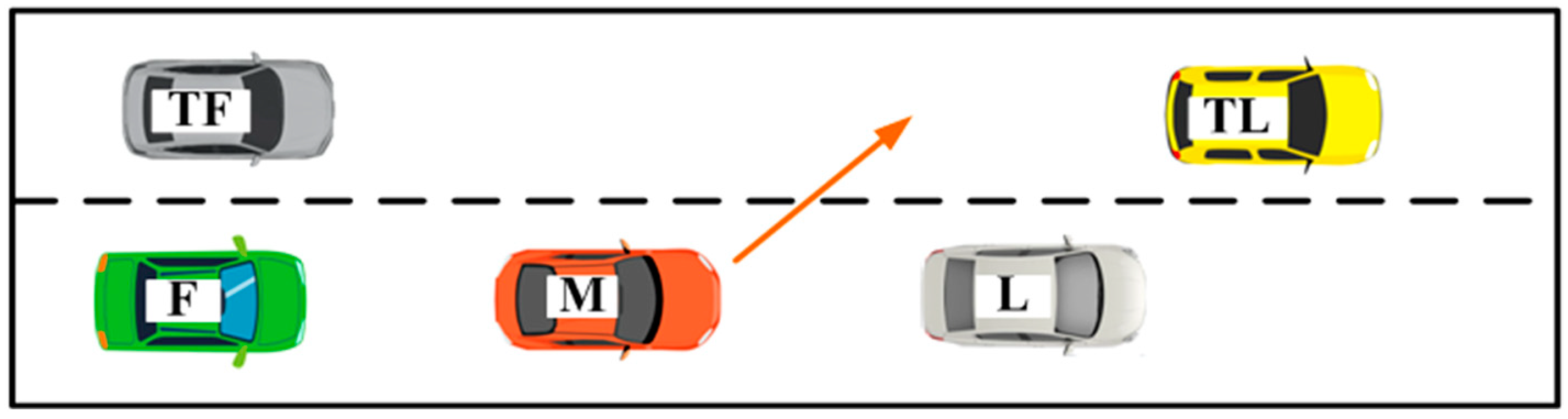
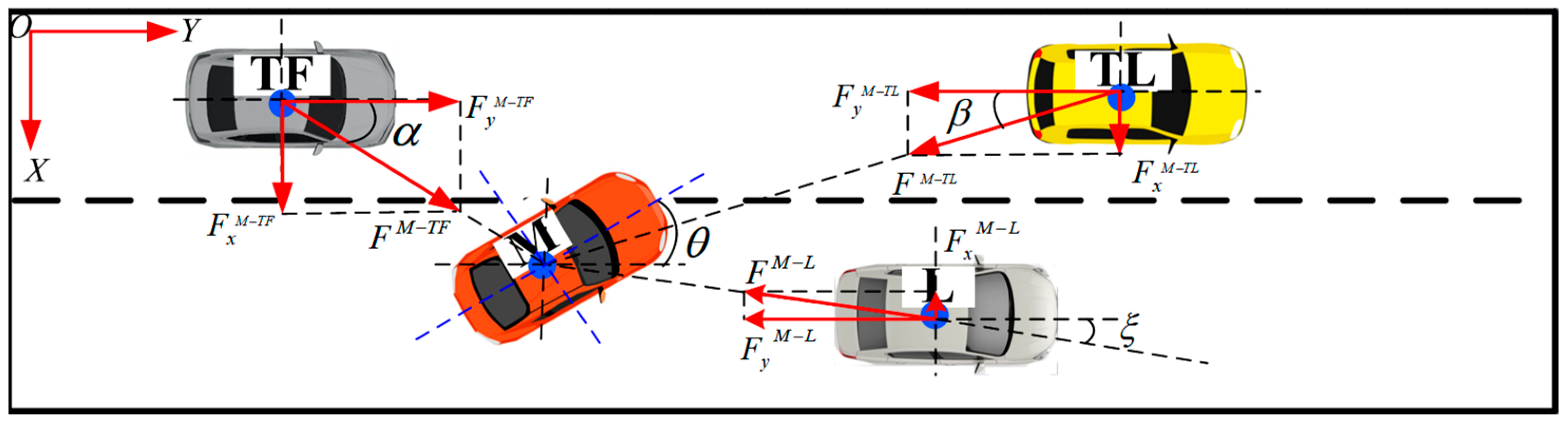
3.2.1. Acceptable Lane Changing Clearance between Vehicle M and Vehicle TL
- (1)
- Longitudinal critical distance
- (2)
- Safe critical time for lane changing
3.2.2. Acceptable Lane Changing Clearance between Vehicle M and Vehicle TF
3.2.3. Acceptable Lane Changing Clearance between Vehicle M and Vehicle L
3.3. Vehicle Interaction Potential Lane Change Model Considering Acceptable Lane Changing Clearance
- (1)
- When , vehicle M continues to follow.
- (2)
- When , the vehicle is subjected to repulsive force resulting in lane changing intention. When or indicates that vehicle M is being repulsed longitudinally by vehicle TL or vehicle TF, lane changing is not recommended. When and , it means that vehicle TL and vehicle TF exert gravity on vehicle M and can change lanes. At this time, vehicle M is subjected to lateral gravity and is , which causes vehicle M to accelerate crosswise and change lanes. As vehicle M turns to drive, vehicle L exerts a lateral repulsive force on vehicle M, forcing vehicle M to accelerate laterally away from the original lane, so the sum of lateral forces received by the vehicle is . According to the relationship between force and acceleration, the following can be obtained: , that is, vehicle M will accelerate to the target lane with an acceleration of .
4. Model Verification
4.1. Numerical Simulation Analysis
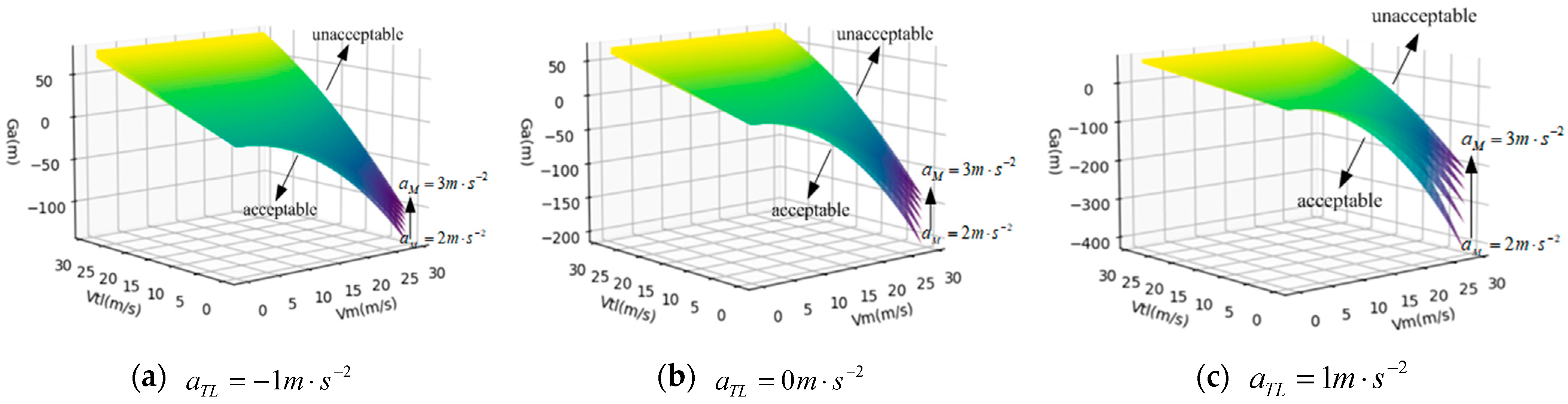
4.1.1. Simulation Analysis of Acceptable Clearance of Lane Changing between Vehicle M and Vehicle TL
4.1.2. Simulation Analysis of Acceptable Clearance of Lane Changing between Vehicle M and Vehicle TF
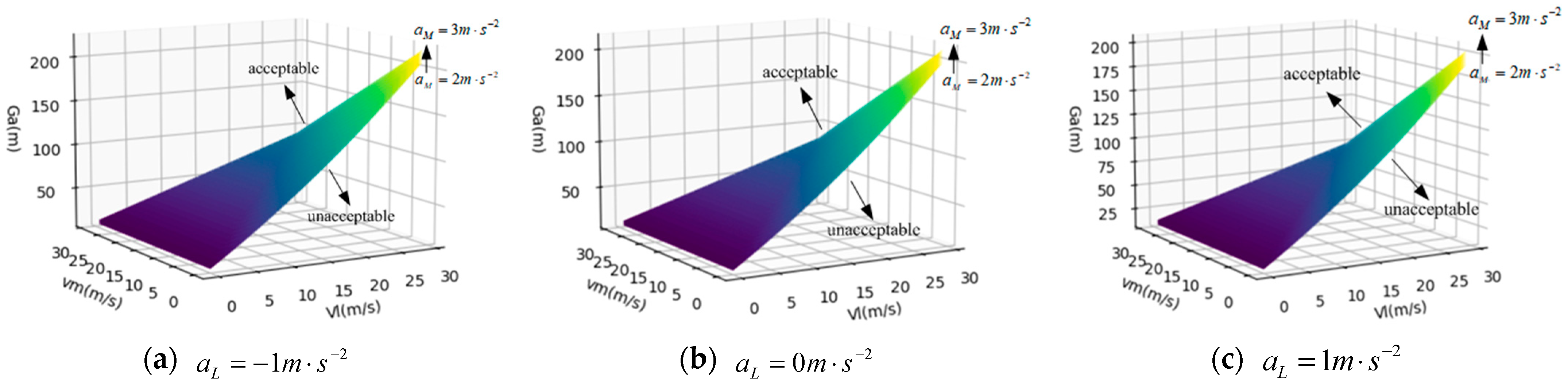
4.1.3. Simulation Analysis of Acceptable Clearance of Lane Changing between Vehicle M and Vehicle L
4.2. Model Evaluation
5. Conclusions
- (1)
- The establishment of vehicle interaction potential based on Lennard-Jones potential introduced the correction of vehicle shape, speed, acceleration, and steering angle, which made up for the previous research on the molecular lane changing model directly based on the Lennard-Jones 6-12 potential function that ignored the huge differences between particles and vehicles in parameters such as mass and velocity. By drawing the spatial distribution map of the vehicle action potential field under different motion states, the changes in the vehicle action potential field with vehicle speed, acceleration, and steering angle can be directly analyzed, which makes the study of vehicle microscopic behavior based on molecular dynamics more realistic.
- (2)
- In the previous study of the molecular dynamics lane changing model, the setting of longitudinal critical distance after lane changing only considered the speed and acceleration of the current vehicle, ignoring the influence of the running state of the leading vehicle on the critical safety distance after lane changing. In this paper, the acceleration of the front vehicle is introduced into the longitudinal critical distance, and the relationship between the acceptable clearance of lane changing and the speed difference and acceleration difference of the interacting vehicle is clarified through the analysis of the safe critical time of lane changing. The acceptable gap expressions between lane changing vehicle M and leading vehicle L and target lane leading vehicle TL and target lane following vehicle TF were constructed, respectively. Through simulation analysis of different motion states of interactive vehicles, reasonable suggestions were put forward for lane changing behavior in the networked environment.
- (3)
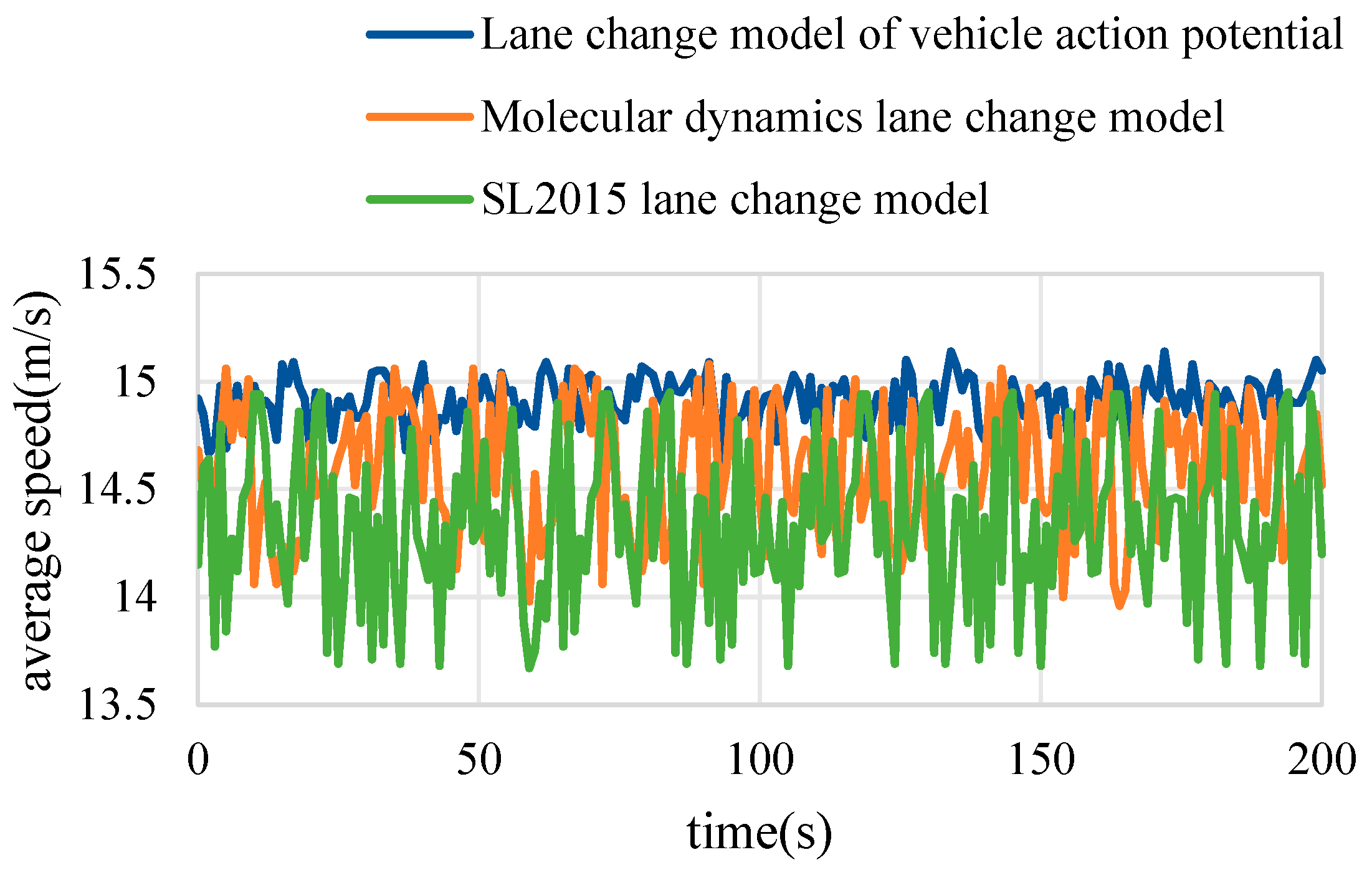
- A lane changing model based on vehicle interaction potential is established, the action potential and potential field force generated by the surrounding interacting vehicles of the lane changing vehicle are analyzed, and the driving decision of vehicle M under different potential field forces is given. Compared with the molecular dynamicsbased lane changing model and LS2015 model, the effectiveness of the proposed method is verified. It has theoretical guiding significance for vehicle lane changing behavior decisions in future intelligent network environments.
- (4)
- The following problems should be considered in the following research: First, the paper compares the vehicle as a molecule. In order to simplify the model, the center of mass of the vehicle is taken as the coordinate point, and the influence of the vehicle shape on the distance is ignored. Second, the end of the paper uses simulation tests to verify the analysis, not using the data of natural experiments to verify, and there may be more uncertain factors in the actual driving environment; in following research, still needed is the use of data of natural experiments to verify the effectiveness.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gipps, P.G. A Model for the Structure of lane changing Decisions. Transp. Res. Part B 1986, 20, 403–414. [Google Scholar] [CrossRef]
- Olsen, E.C.; Lee, S.E.; Wierwille, W.W.; Goodman, M.J. Analysis of distribution, frequency, and duration of naturalistic lane changings. Proc. Hum. Factors Econ. Soc. 2002, 46, 740–741. [Google Scholar]
- Ahmed, K.I. Modeling Drivers’ Acceleration and Lane Changing Behavior. Ph. D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1999. [Google Scholar]
- Jia, H.F.; Tan, Y.L.; Li, Q.; Yang, D. Gap Acceptance Model Construction in Expressway Junction Area considering Driver Characteristics. J. Jilin Univ. (Eng. Technol. Ed.) 2015, 45, 55–61. [Google Scholar]
- Xu, L.H.; Ni, Y.P.; Luo, Q.; Huang, Y.G. Lane-changing model based on minimum safety distance. J. Guang Xi Norm. Univ. 2011, 12, 1–6. [Google Scholar]
- Wang, C.L.; Li, Z.L.; Chen, Y.Z.; Dai, G.P. Reach on lane-change models considering restricted space. J. Highw. Transp. Res. Dev. 2012, 1, 121–127. [Google Scholar]
- Shang, L.; Lu, H.P. Model of vehicle behavior under multi-lane road conditions. J. Hua Zhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2007, 35, 115–117. [Google Scholar]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Proceedings of the IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; pp. 500–505. [Google Scholar]
- Gao, K.; Yan, D.; Yang, F.; Xie, J.; Liu, L.; Du, R.; Xiong, N. Conditional artificial potential field-based autonomous vehicle safety control with interference of lane changing in mixed traffic scenario. Sensors 2019, 19, 4199. [Google Scholar] [CrossRef] [PubMed]
- Wolf, M.T.; Burdick, J.W. Artificial Potential Functions for Highway Driving with Collision Avoidance. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 3731–3736. [Google Scholar]
- Li, L.H.; Gan, J.; Qu, X.; Ran, B. Vehicle lane changing model based on safety potential field theory in intelligent network environment. China J. Highw. Transp. 2021, 34, 184–195. [Google Scholar]
- Bham, G.H. Estimating driver mandatory lane change behavior on amulti-ane freeway. In Proceedings of the 88th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 11–15 January 2009; Transportation Research Board: Washington, DC, USA, 2009. [Google Scholar]
- Yang, M.M.; Wang, X.S.; Quddus, M. Examining lane change gap acceptance, duration and impact using naturalistic driving data. Transp. Res. Part C Emerg. Technol. 2019, 104, 317–331. [Google Scholar] [CrossRef]
- E, W.J. Research on Vehicle-Vehicle Conflict Detection and Resolution Algorithm at Unsignalized Intersection; Jilin University: Changchun, China, 2012. [Google Scholar]
- Li, J. Study on Traffic Flow Characteristics and Its Model Based on Molecular Dynamics; School of Automobile and Transportation of Qingdao University of Technology: Qingdao, China, 2018. [Google Scholar]
- Qu, D.Y.; Zhang, K.K.; Wang, T.; Song, H.; Dai, S.-c. Analysis of lane changing decision Behavior and Molecular Dynamics Modeling of Autonomous vehicle. J. Jilin Univ. (Eng. Ed.) 2024, 700–710. [Google Scholar]
- Shi, B.Y.; Yang, X.G.; Yu, X.F. Modeling and simulation of discretionary lane-change considering the combination with the car-following model. J. Transp. Sci. Eng. 2009, 25, 91–96. [Google Scholar]
- Yanakiev, D.; Kanellakopoulos, I. Non linear spacing policies for automated heavy-duly vehicles. IEEE Trans. Veh. Technol. 1998, 47, 1365–1377. [Google Scholar] [CrossRef]
- Jia, Y.F.; Qu, D.Y.; Zhao, Z.X.; Wang, T.; Song, H. Car-following Decision-making and Model for Connected and Autonomous Vehicles Based on Safety Potential Field. Transp. Syst. Eng. Inf. 2022, 22, 85–97. [Google Scholar]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Qu, D.; Chen, Y.; Yang, Y.; Cui, S. Modeling of Lane Changing Behavior of Connected Driving Based on Vehicle Interaction Potential. Appl. Sci. 2024, 14, 4659. https://doi.org/10.3390/app14114659
Li J, Qu D, Chen Y, Yang Y, Cui S. Modeling of Lane Changing Behavior of Connected Driving Based on Vehicle Interaction Potential. Applied Sciences. 2024; 14(11):4659. https://doi.org/10.3390/app14114659
Chicago/Turabian StyleLi, Juan, Dayi Qu, Yicheng Chen, Yuxiang Yang, and Shanning Cui. 2024. "Modeling of Lane Changing Behavior of Connected Driving Based on Vehicle Interaction Potential" Applied Sciences 14, no. 11: 4659. https://doi.org/10.3390/app14114659