
Development of Individual Rotor Mutual Induction (IRMI) Method for Coaxial Counter-Rotating Rotor

Abstract
1. Introduction
- (1)
- Full-model computational fluid dynamics (CFD)
- (2)
- CFD with actuator line model (ALM)
- (3)
- CFD with mixing plane (MP) model
- (4)
- Vortex lattice method
- (5)
- Blade element and momentum (BEM) method
- (6)
- CFD with actuator disk model (ADM)
2. IRMI Method
2.1. Characteristics of the Individual Rotor
2.2. Mutual Induction Factors
2.3. Condition
- Free stream (FS) flow velocity—U;
- FR angular speed—ΩF.
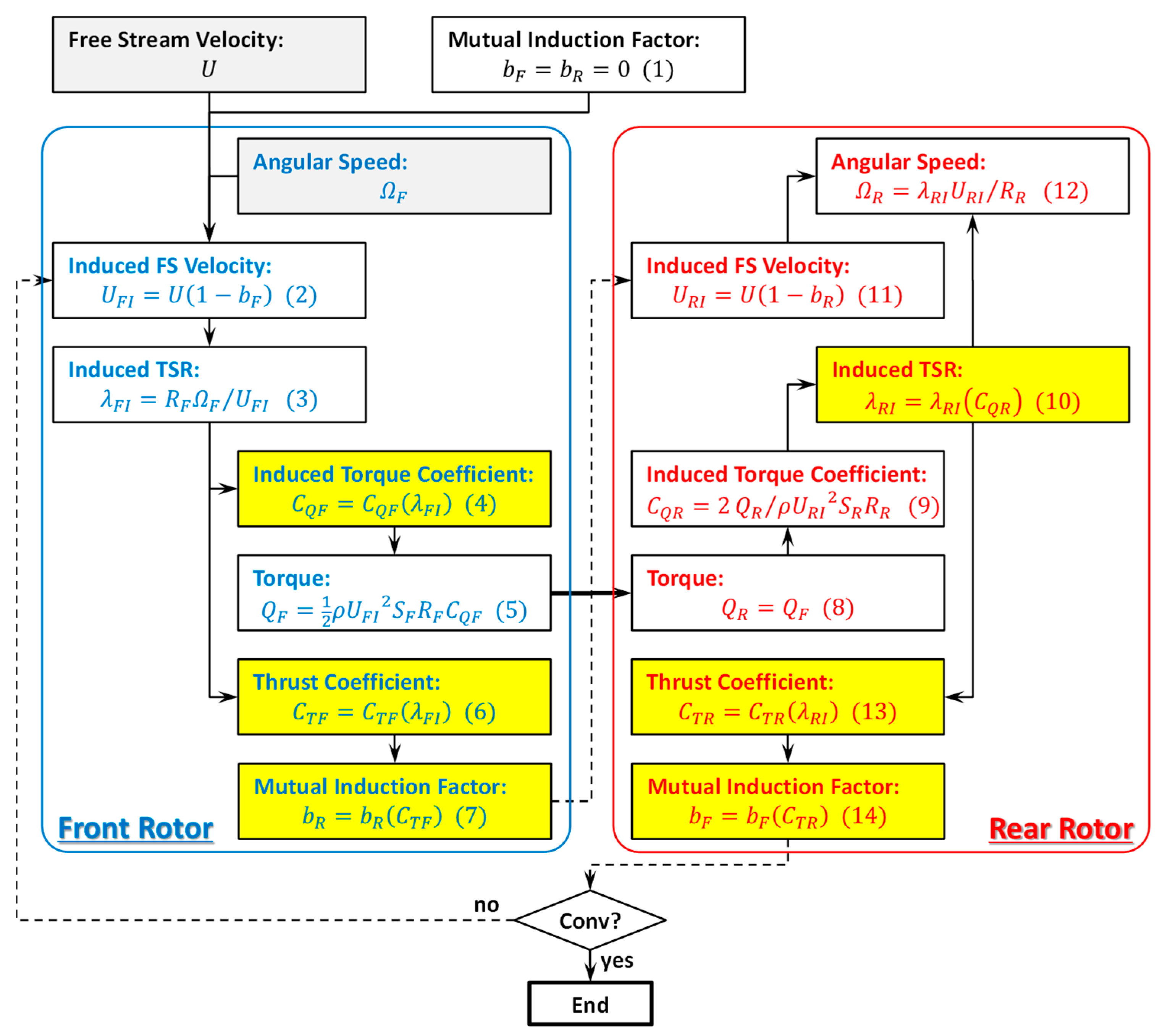
2.4. Calculation of Equilibrium Condition
- (1)
- Initial conditions
- (2)
- Induced FS velocity and induced TSR at FR
- (3)
- Torque and thrust coefficients of FR
- (4)
- Torques of FR and RR
- (5)
- Mutual induction factor and induced FS velocity at RR
- (6)
- Torque coefficient of RR
- (7)
- Induced TSR and angular speed of RR
- (8)
- Thrust coefficient of RR
- (9)
- Mutual induction factor at FR
- (10)
- Convergence judgment
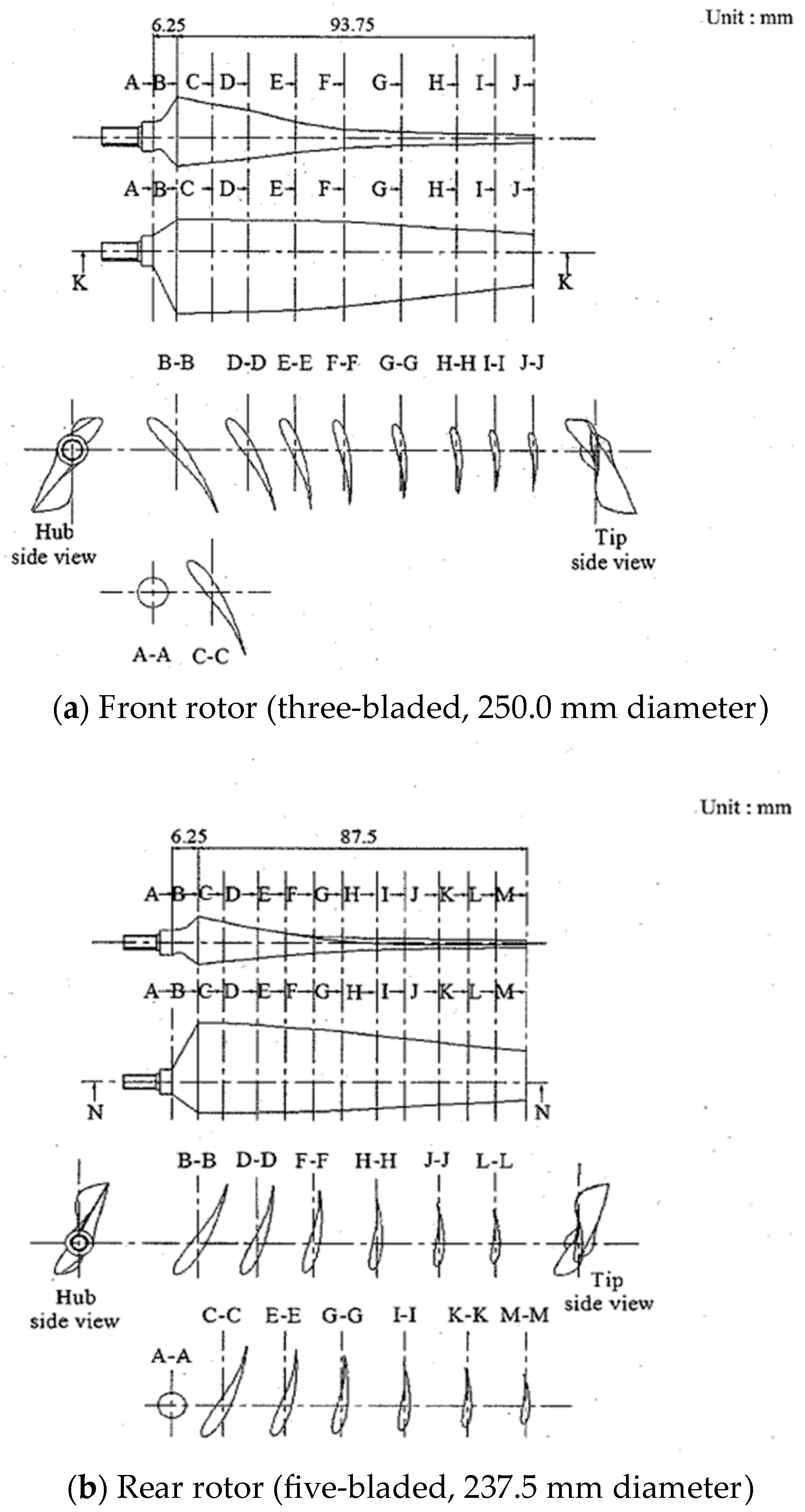
3. CCRR Model
3.1. Blade Shape
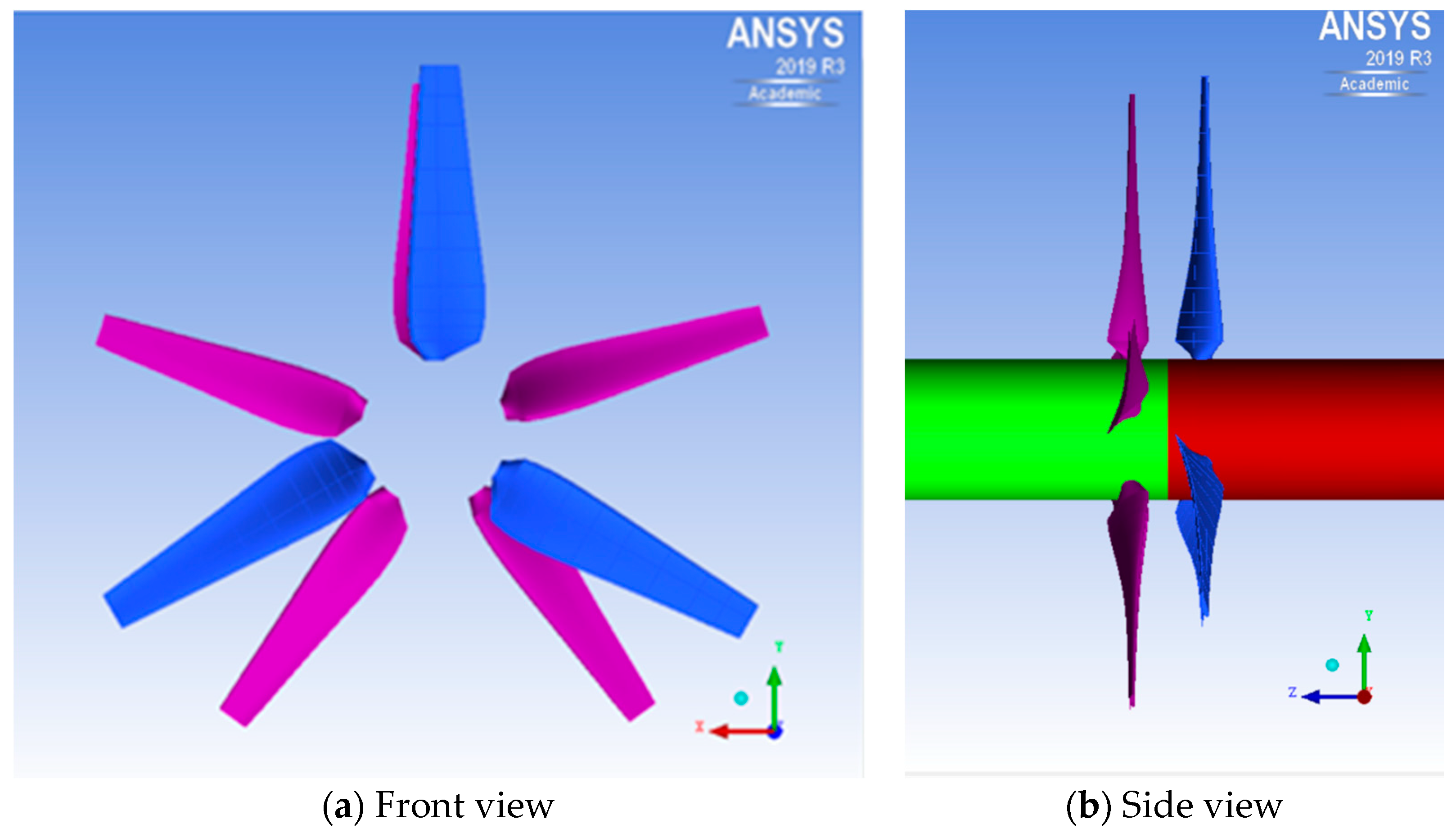
3.2. Rotor Shape
4. CCRR MP Model CFD
4.1. Analysis Method
4.2. Analysis Conditions
- Working fluid: water;
- Density ρ: 997 kg/m3;
- Inlet flow velocity U: 1.0 m/s;
- TSR λ: 1.0 to 8.0;
- Turbulence model: k-ω SST.
4.3. Analysis Grid/Boundary Conditions
- Wall boundary conditions: stick (blade and hub) and slip (shroud);
- Inlet boundary: flow velocity (steady);
- Outlet boundary: gauge pressure (0 Pa);
- Boundary condition between rotors: stage (mixing plane);
- Number of calculation grids: 3.6 million (front) and 3.1 million (rear);
5. Individual Rotor CFD
5.1. Analysis Method
5.2. Analysis Conditions
- Working fluid: water;
- Water density ρ: 997 kg/m3;
- Inlet flow velocity U: 1.0 m/s;
- Outlet gauge pressure: 0 Pa;
- TSR λ: 1.0 to 8.0 (Table 2);
- Turbulence model: k-ω SST.
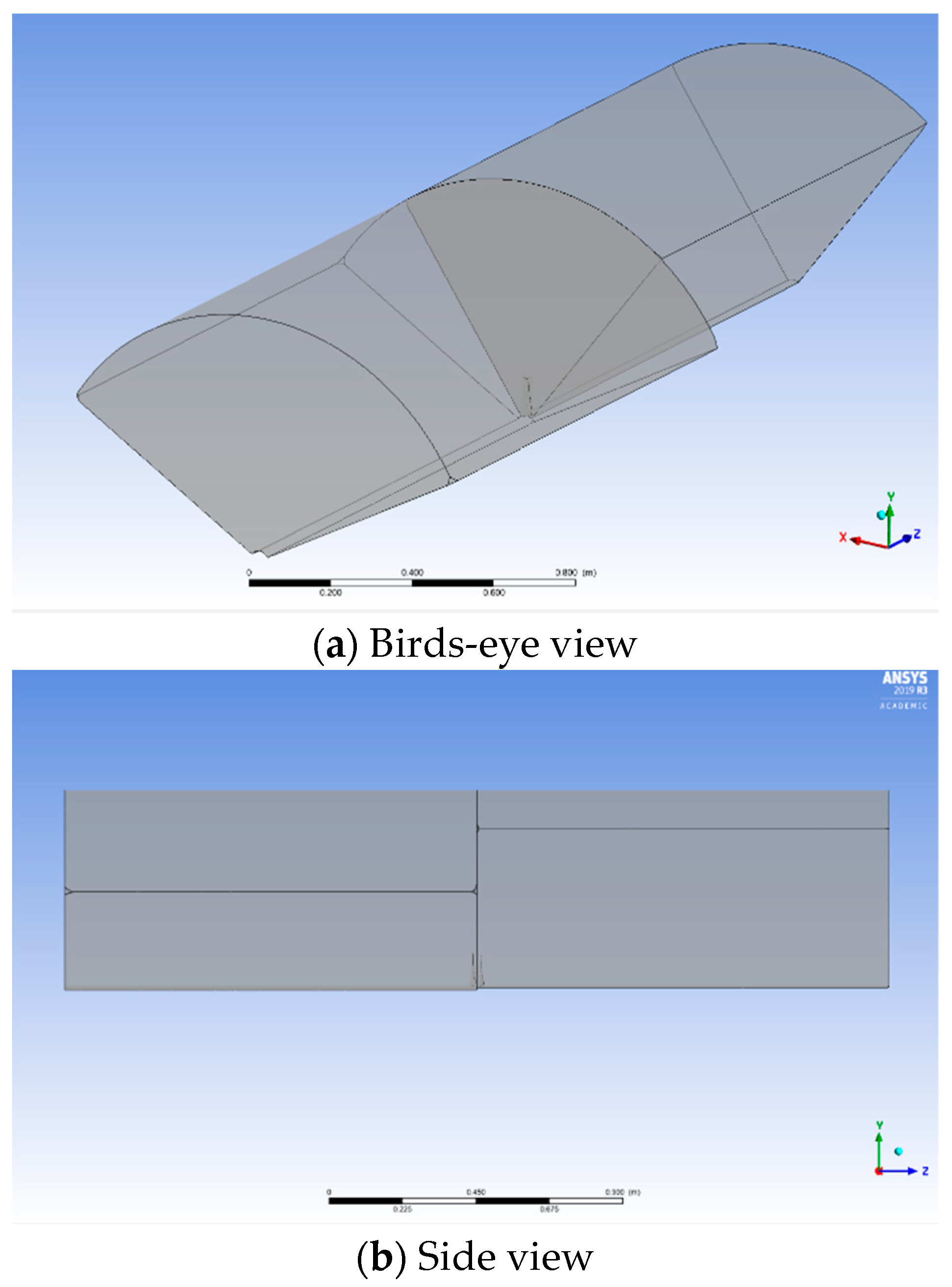
5.3. Analysis Grid and Analysis Conditions
- Analysis domain: Figure 5;
- Wall boundary conditions: stick (blade and hub) and slip (shroud);
- Number of calculation grids: 4.1 million (FR) and 3.5 million (RR).


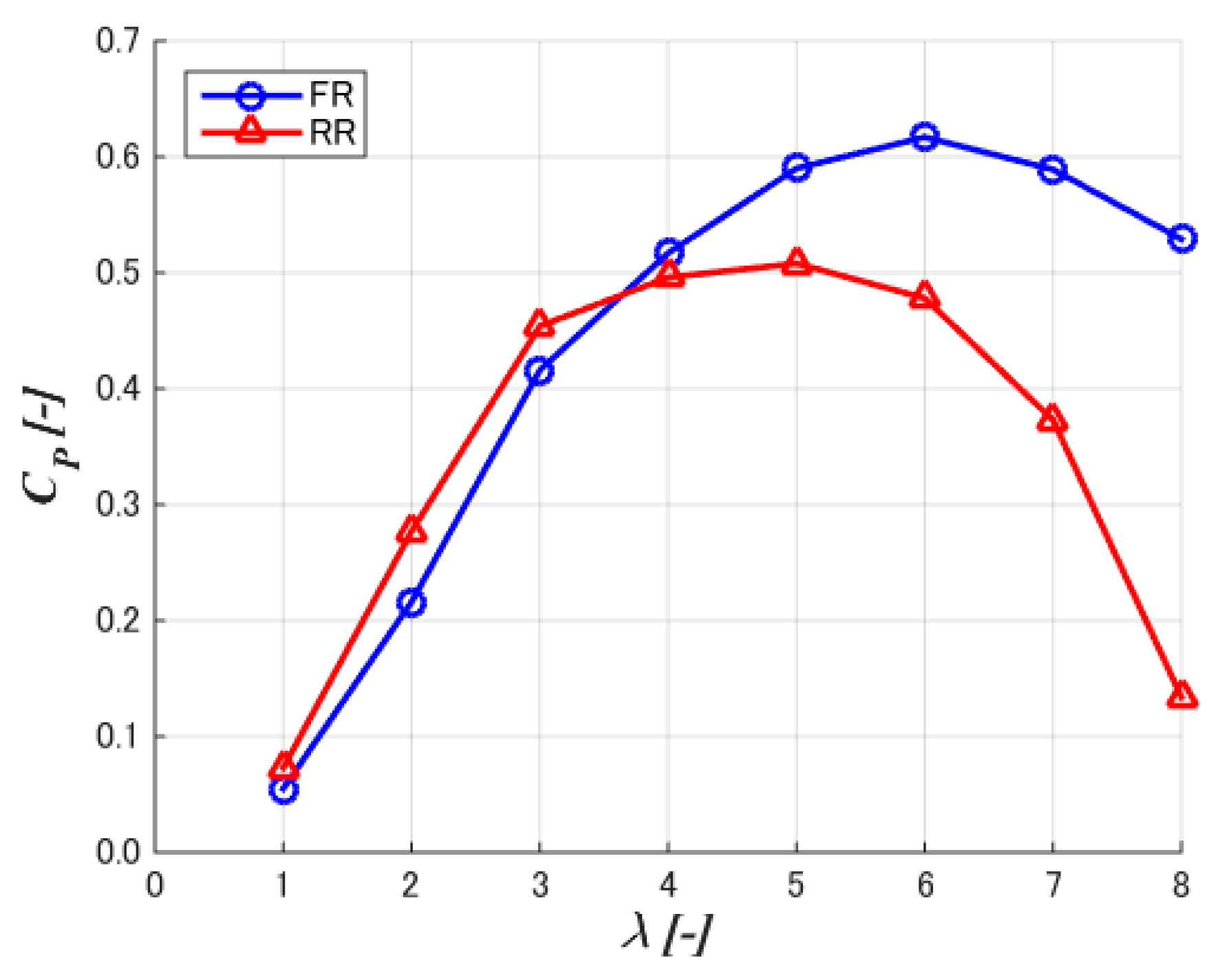
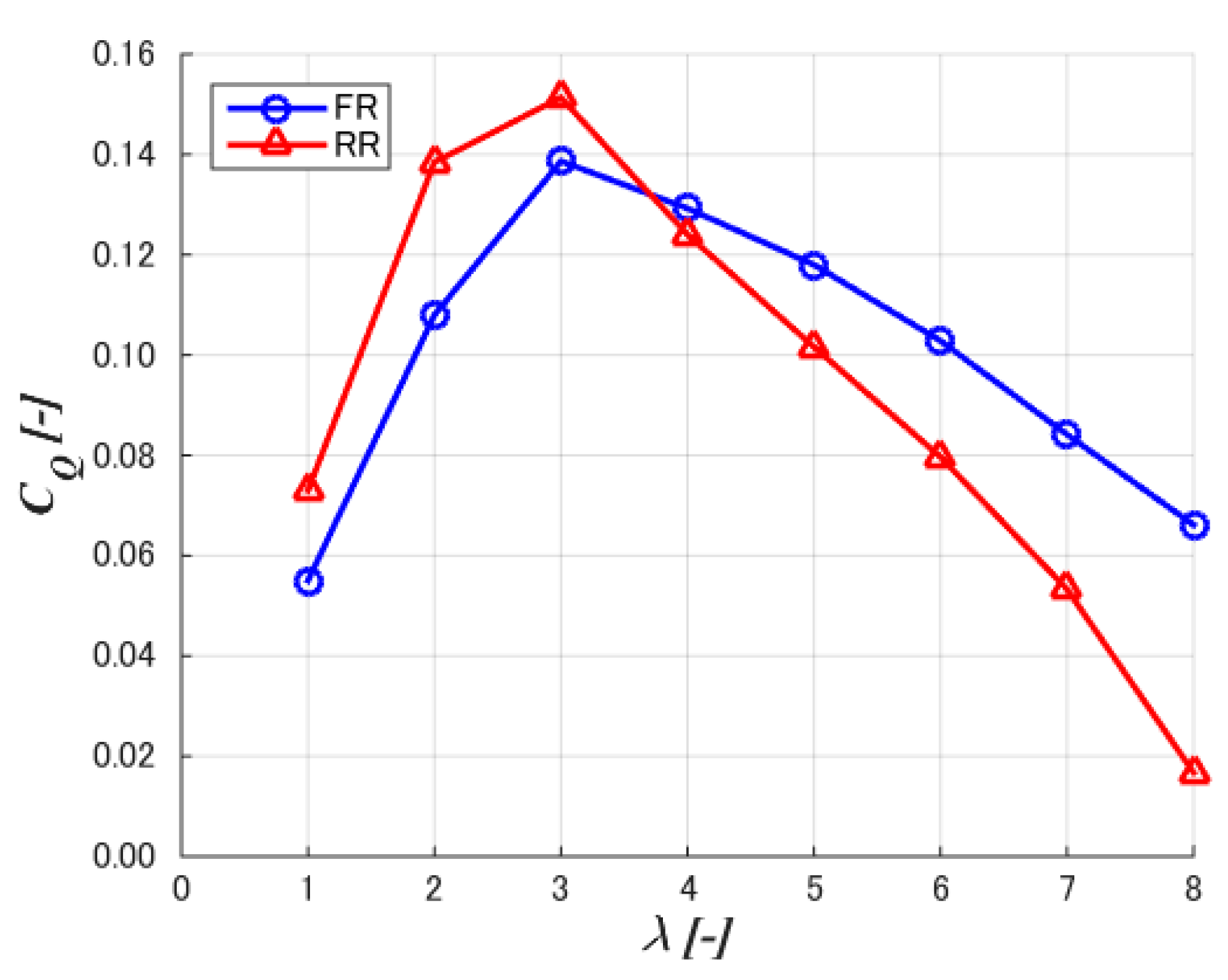
5.4. CFD Results
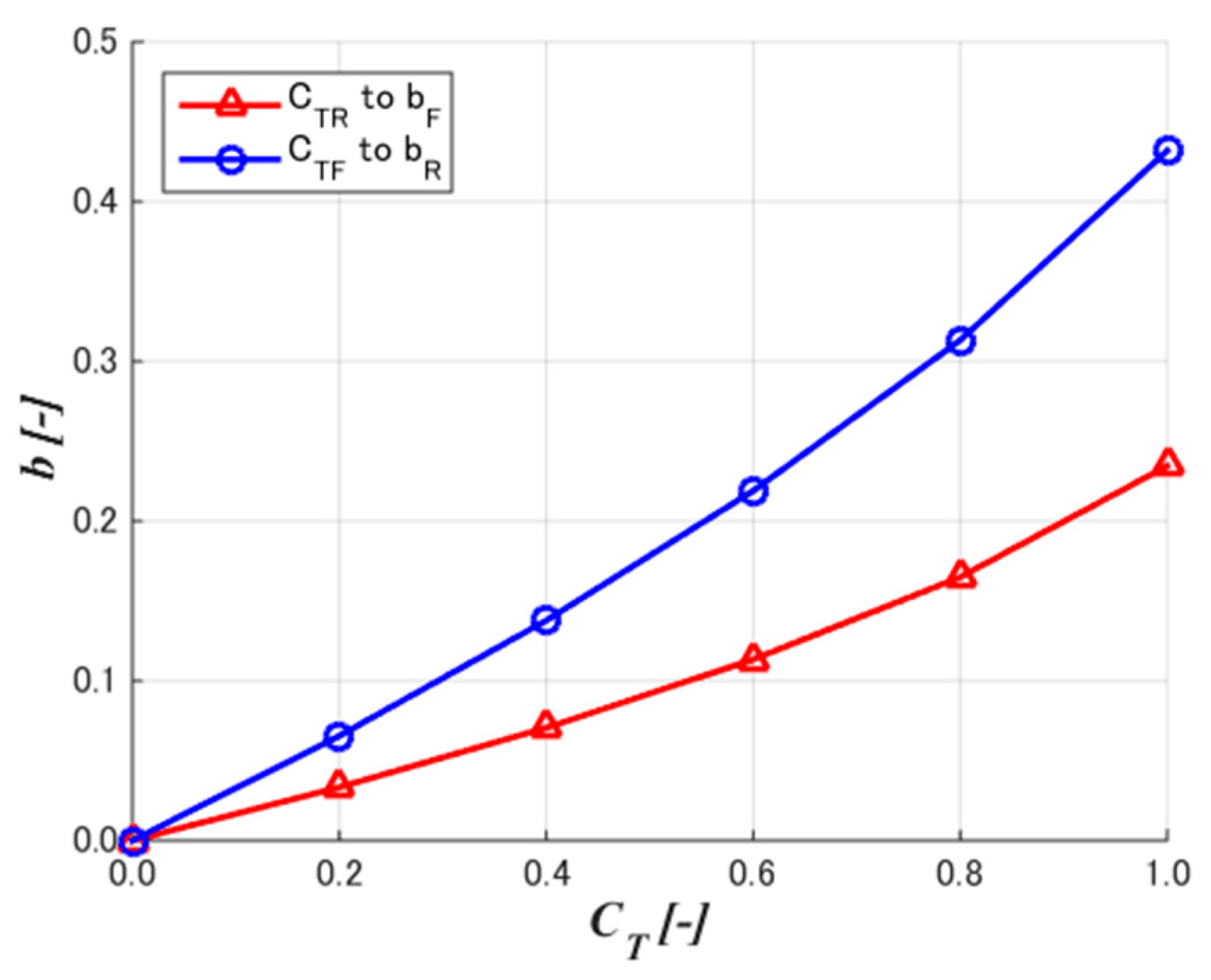
6. Mutual Induction Factors Calculation
6.1. Analysis Method
6.2. Analysis Conditions
- Working fluid: water;
- Water density ρ: 997 kg/m3;
- Inlet flow velocity U: 1.0 m/s;
- Outlet gauge pressure: 0 Pa;
- Thrust coefficient CT: 0.2 to 1.0 (0.2 each);
- Turbulence model: k-ω SST.
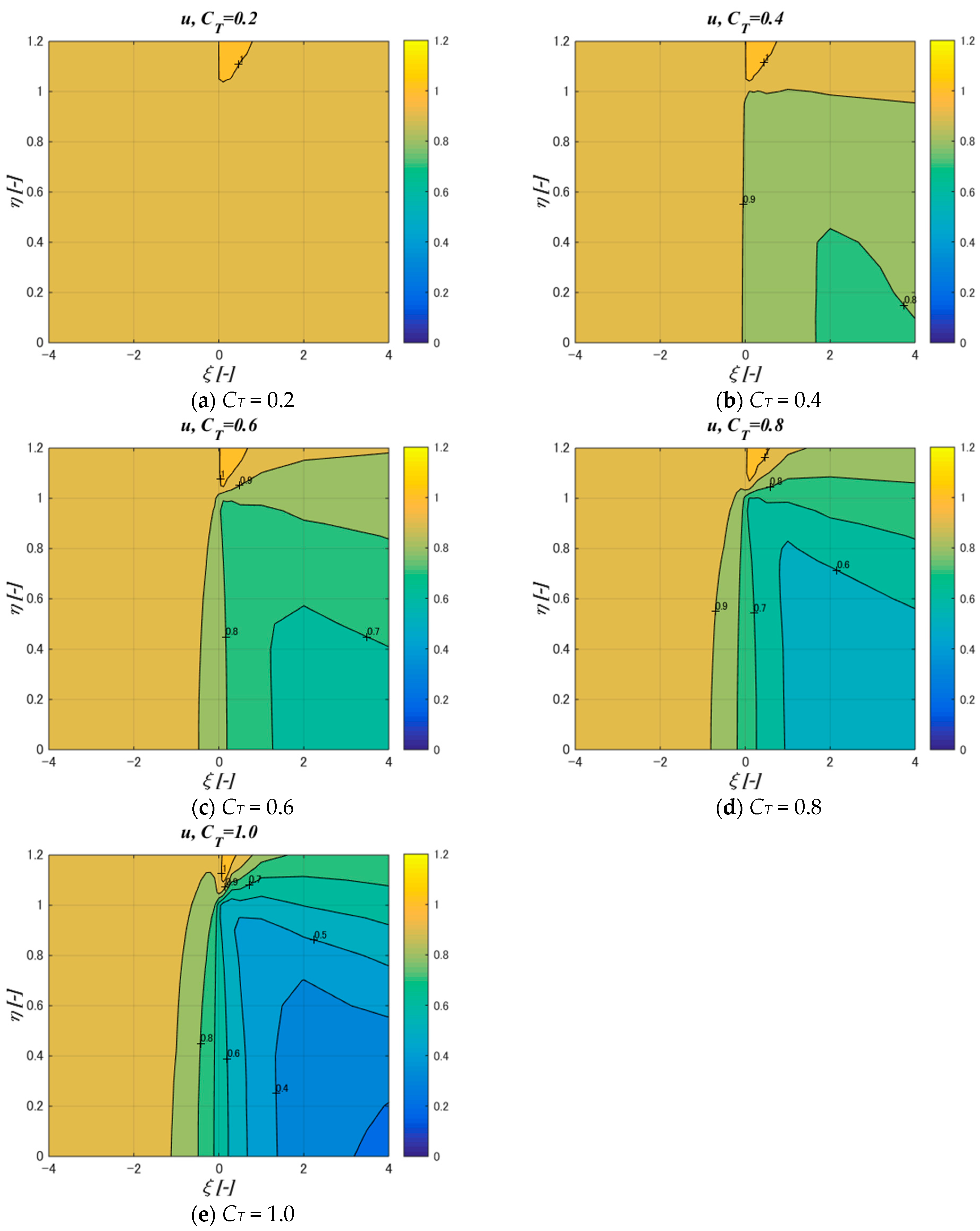
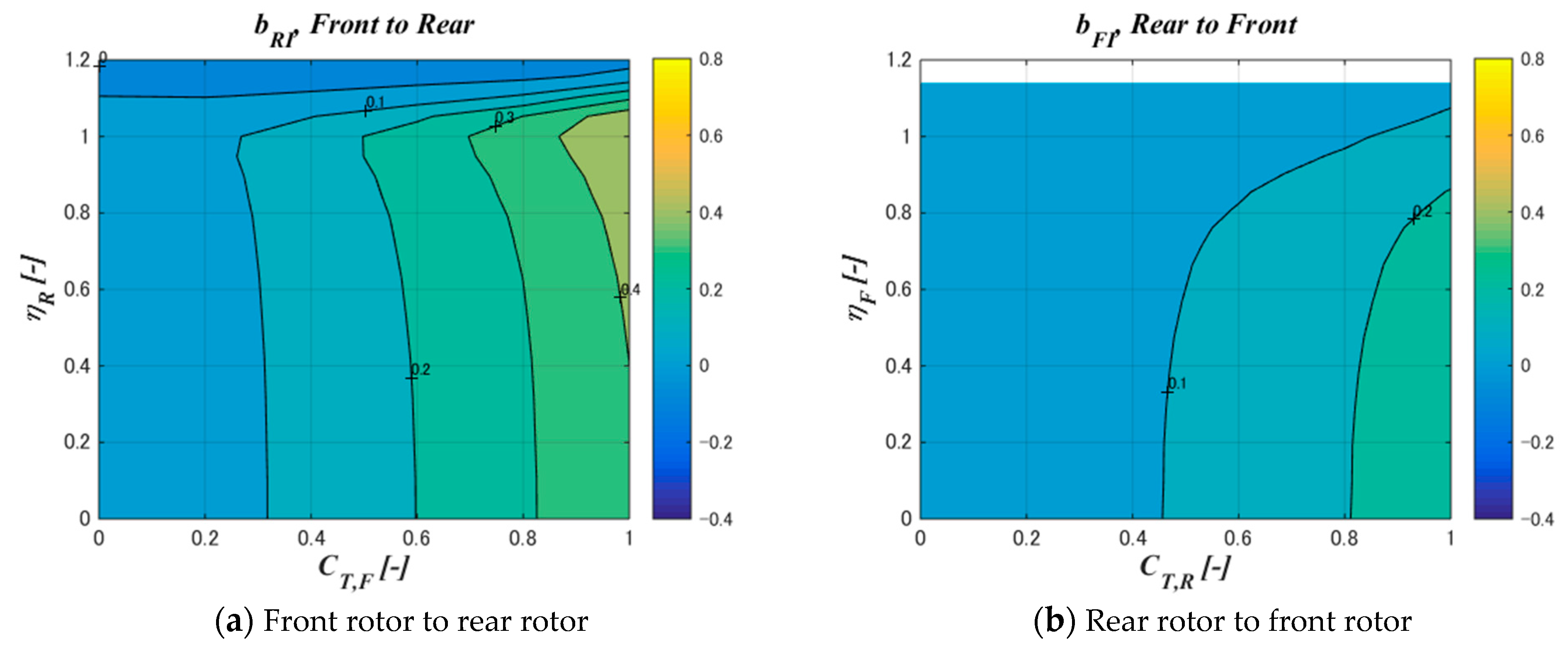
6.3. Rotor Mutual Induction Analysis Results
7. IRMI Method
7.1. Analysis Method
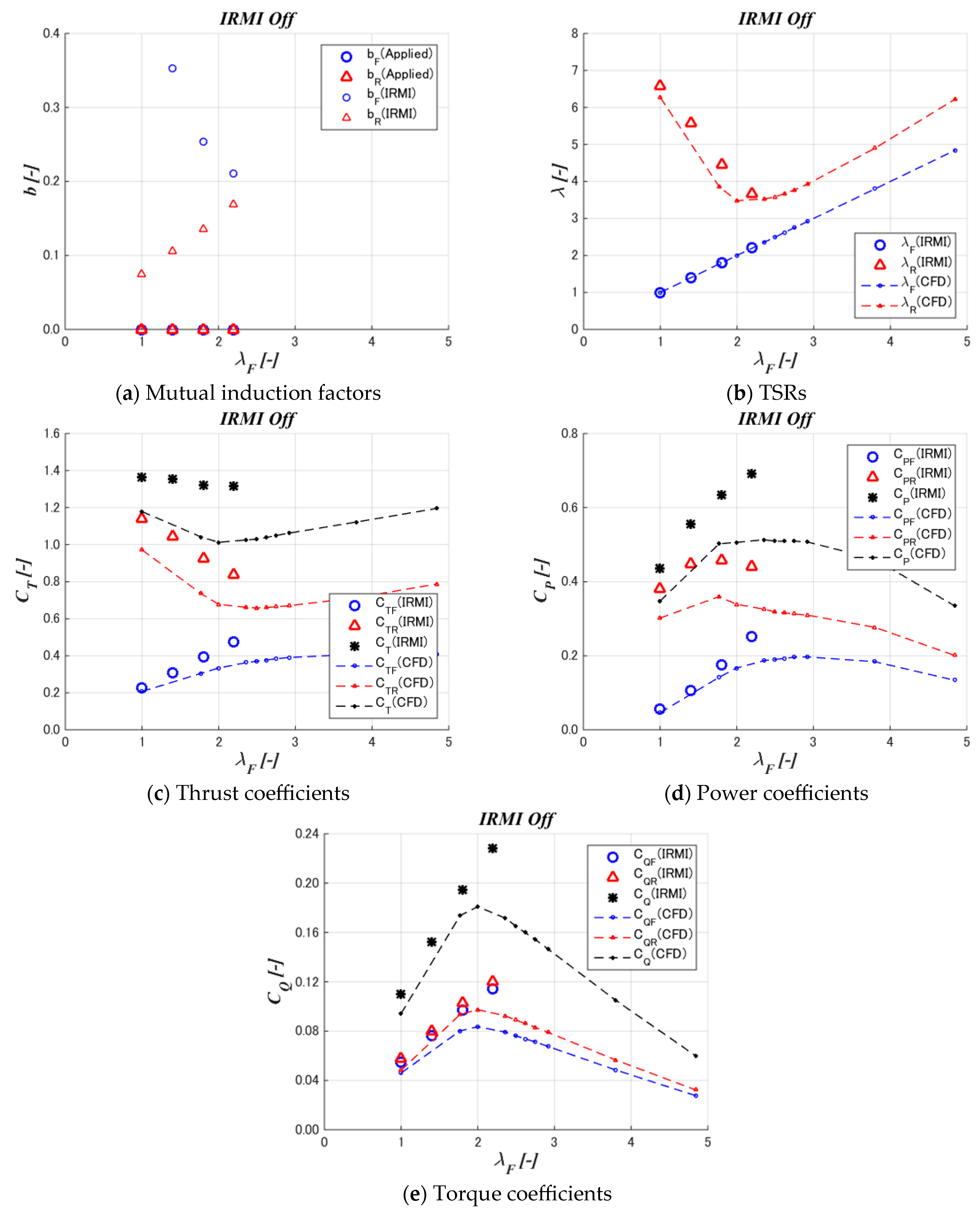
7.2. Analysis Results
- (1)
- Effect of mutual interference on hydrodynamic characteristics
- (2)
- Control
- (3)
- Analysis time
8. Conclusions
8.1. Results Summary
8.2. Future Challenges
- (1)
- The reason for the slight difference from CFD with the MP model can be that the mutual induction is assumed to be uniform on the rotor surface and the mutual induction in the rotational direction and their propagation are ignored.
- (2)
- The accuracy of the present method should be validated by experiments, as well as the influences of turbine configurations, such as the number of blades and the distance between the rotors.
- (3)
- Furthermore, the BEM theory may also be applicable to the characteristics of the individual rotor.
- (4)
- This study dealt with steady characteristics, which are useful for the performance and steady load. However, this method is insufficient for the application to fatigue loads, noise, etc., which are important dynamic characteristics.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Symbols | |
| a | Axial induction factor in the momentum theory or BEM |
| b | Mutual induction factor |
| CP | Power coefficient |
| CT | Thrust coefficient |
| CQ | Torque coefficient |
| D | Rotor diameter |
| n | Rotor speed |
| Q | Rotor torque |
| R | Rotor radius |
| r | Radial position from the rotor center |
| S | Rotor area |
| U | Velocity |
| u | Velocity normalized by the inflow speed |
| x | Longitudinal position from the rotor |
| Greek | |
| η | Radial position normalized by the rotor radius (=r/R) |
| λ | Tip speed ratio |
| ξ | Longitudinal position from the rotor center, normalized by the rotor diameter (=x/D) |
| ρ | Density |
| Ω | Rotor angular speed |
| Subscript | |
| F | Front rotor |
| I | Induced |
| R | Rear rotor |
| Abbreviations | |
| ADM | Actuator disk model |
| ALM | Actuator line model |
| BEM | Blade element and momentum (method) |
| CCRR | Coaxial counter-rotating rotor |
| FR | Front rotor |
| FS | Free stream |
| MP | Mixing plane (model) |
| IRMI | Individual rotor mutual induction (method) |
| RR | Rear rotor |
| TSR | Tip speed ratio |
References
- Oprina, G.C.; Chihaia, R.A.; El-Leathey, L.A.; Nicolaie, S.; Babutanu, C.A.; Voina, A. A Review on Counter-Rotating Wind Turbines Development. J. Sustain. Energy 2016, 7, 3. [Google Scholar]
- Liu, X.; Feng, B.; Liu, D.; Wang, Y.; Zhao, H.; Si, Y.; Zhang, D.; Qian, P. Study on Two-Rotor Interaction of Counter-Rotating Horizontal Axis Tidal Turbine. Energy 2022, 241, 122839. [Google Scholar] [CrossRef]
- Szlivka, F.; Hetyei, C.; Fekete, G.; Molnár, I. Comparison of Mixing Plane, Frozen Rotor, and Sliding Mesh Methods on a Counter-Rotating Dual-Rotor Wind Turbine. Appl. Sci. 2023, 13, 8982. [Google Scholar] [CrossRef]
- Sutikno, P.; Saepdin, D.B. Design and Blade Optimization of Contra Rotation Double Rotor Wind Turbine. Int. J. Mech. Mech. Eng. 2011, 11, 115301-7474. [Google Scholar]
- Kumar, P.S.; Bensingh, R.J.; Abraham, A. Computational Analysis of 30 kW Contra Rotor Wind Turbine. Int. Sch. Res. Netw. Renew. Energy 2012, 2012, 939878. [Google Scholar] [CrossRef]
- Sorensen, J.N.; Shen, W.Z. Numerical Modeling of Wind Turbine Wakes. ASME J. Fluids Eng. 2002, 124, 393–399. [Google Scholar] [CrossRef]
- Pacholczyk, M.; Karkosiński, D. Parametric Study on a Performance of a Small Counter-Rotating Wind Turbine. Energies 2020, 13, 3880. [Google Scholar] [CrossRef]
- Fuchiwaki, H. Development of Individual Rotor Mutual Interaction Method for Counter Rotating Rotor. Master’s Thesis, Saga University, Saga, Japan, 2024. (In Japanese). [Google Scholar]
- Lee, S.; Kim, H.; Lee, S. Analysis of Aerodynamic Characteristics on a Counter-Rotating Wind Turbine. Curr. Appl. Phys. 2010, 10, S339–S342. [Google Scholar] [CrossRef]
- Lee, N.J.; Kim, I.C.; Kim, C.G.; Hyun, B.S.; Lee, Y.H. Performance Study on a Counter-Rotating Tidal Current Turbine by CFD and Model Experimentation. Renew. Energy 2015, 79, 122–126. [Google Scholar] [CrossRef]
- Lee, S.; Kim, H.; Son, E.; Lee, S. Effects of Design Parameters on Aerodynamic Performance of a Counter-Rotating Wind Turbine. Renew. Energy 2012, 42, 140–144. [Google Scholar] [CrossRef]
- Hwang, B.; Lee, S. Lee Soogab, Optimization of a Counter-Rotating Wind Turbine Using the Blade Element and Momentum Theory. J. Renew. Sustain. Energy 2013, 5, 052013. [Google Scholar] [CrossRef]
- Newman, B.G. Multiple Actuator—Disc Theory for Wind Turbines. J. Wind. Eng. Ind. Aerodyn. 1986, 24, 215–225. [Google Scholar] [CrossRef]
- Matsumiya, H.; Kogaki, T.; Takahashi, N.; Iida, M.; Waseda, K. Development and Experimental Verification of the New MEL Airfoil Series for Wind Turbines. In Proceedings of the JWEA Symposium 2000, Tokyo, Japan, 16–17 November 2000; The International Molinological Society: Berryville, VA, USA, 2000; pp. 92–95. (In Japanese). [Google Scholar]
- Wei, X.; Huang, B.; Kanemoto, T. Performance Research of Counter-rotating Tidal Stream Power Unit. Int. J. Fluid Mach. Syst. 2016, 9, 2. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| (mm) | 250.0 |
| Center angle of the FR domain (degree) | 120 |
| Diameter of RR (mm) | 237.5 |
| Center angle of the RR domain (degree) | 72 |
| 0.95 | |
| Length of analysis domain (mm) | 2500 |
| Length of analysis domain (mm) | 625 |
| Distance between FR and RR (mm) | 25 |
| 1.0 | −8.00 | −76.39 | 8.42 | 80.42 |
| 2.0 | −16.00 | −152.79 | 16.84 | 160.83 |
| 3.0 | −24.00 | −229.18 | 25.26 | 241.25 |
| 4.0 | −32.00 | −305.58 | 33.68 | 321.66 |
| 5.0 | −40.00 | −381.97 | 42.11 | 402.08 |
| 6.0 | −48.00 | −458.37 | 50.53 | 482.49 |
| 7.0 | −56.00 | −534.76 | 58.95 | 562.91 |
| 8.0 | −64.00 | −611.15 | 67.37 | 643.32 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoshida, S.; Fuchiwaki, H.; Matsuoka, K. Development of Individual Rotor Mutual Induction (IRMI) Method for Coaxial Counter-Rotating Rotor. Appl. Sci. 2024, 14, 4782. https://doi.org/10.3390/app14114782
Yoshida S, Fuchiwaki H, Matsuoka K. Development of Individual Rotor Mutual Induction (IRMI) Method for Coaxial Counter-Rotating Rotor. Applied Sciences. 2024; 14(11):4782. https://doi.org/10.3390/app14114782
Chicago/Turabian StyleYoshida, Shigeo, Haruto Fuchiwaki, and Koji Matsuoka. 2024. "Development of Individual Rotor Mutual Induction (IRMI) Method for Coaxial Counter-Rotating Rotor" Applied Sciences 14, no. 11: 4782. https://doi.org/10.3390/app14114782
APA StyleYoshida, S., Fuchiwaki, H., & Matsuoka, K. (2024). Development of Individual Rotor Mutual Induction (IRMI) Method for Coaxial Counter-Rotating Rotor. Applied Sciences, 14(11), 4782. https://doi.org/10.3390/app14114782