1. Introduction
Measuring the metabolic cost from biomechanical data, like ground reaction forces and joint moments, is vital for enhancing health, rehabilitation, and sports through human movement science [
1]. Traditional methods need up to five minutes to average metabolic cost data, but recent advances have cut this to about two minutes [
2]. However, these techniques still cannot quickly assess metabolic costs during a gait cycle, posing challenges for patients in lengthy walking tests.
The significance of ground reaction forces (GRFs) in biomechanical analysis is well-documented, with methodologies ranging from direct force plate measurements to sophisticated estimations using wearable sensors and inertial motion capture systems [
3]. Such advancements have democratized gait and movement analysis, extending the reach of biomechanical assessments beyond the confines of specialized laboratories [
4]. Similarly, joint moments offer a window into the internal dynamics of the musculoskeletal system, revealing the intricate interplay between muscle forces and the resulting movements [
4,
5]. Recent research has further pushed the boundaries of biomechanical analysis by integrating these metrics with advanced computational models to predict metabolic cost [
5,
6,
7,
8,
9]. This interdisciplinary approach melds the precision of biomechanical measurements with the predictive power of computational algorithms, unveiling new perspectives on the energetics of human movement. The use of neural networks, in particular, exemplifies this trend, showcasing the potential of machine learning in deciphering complex relationships between biomechanical inputs and metabolic outcomes [
10].
Drawing from a broader spectrum of artificial intelligence (AI) applications, our previous work has demonstrated the efficacy of optimization methods and artificial neural networks (ANNs) across diverse domains [
11,
12,
13]. These studies underscore AI techniques’ adaptability and bring novel insights into biomechanical analysis. A unified model was developed that leverages walking mechanics to estimate metabolic costs under various conditions, demonstrating the potential of using biomechanical measurements, such as the GRF and joint moments, to predict metabolic costs in human walking [
1]. The model’s capability to accommodate different walking conditions underscores its versatility and applicability in biomechanical analysis, offering new insights into the energetic efficiency of gait. Another study [
14] compared metabolic cost calculations in gait using musculoskeletal energy models. They evaluated the correlation of several metabolic energy expenditure models with experimental data, enriching our understanding of how different models predict the metabolic costs of gait under varied conditions. Integrating the GRF, marker data, and pulmonary gas exchange measurements in their methodology provides a comprehensive approach to assessing the metabolic implications of gait dynamics.
By synthesizing insights from multiple studies, our research underscores the value of merging biomechanical data with AI models to predict metabolic costs. It leverages AI to evaluate how the GRF and joint moments data forecast metabolic costs, enhancing our theoretical and practical understanding of biomechanical energetics. This work paves the way for developing interventions and devices to improve movement efficiency and health.
ANNs are computational models inspired by the human brain’s structure and function [
15,
16]. Recent research has leveraged ANNs to gain deeper insights into the mechanics of movement and the prediction of metabolic costs, offering substantial advancements in personalized healthcare and athletic performance optimization. For instance, a literature review [
17] demonstrated the application of ANNs in predicting the metabolic cost associated with different physical activities, showcasing the potential of machine learning in enhancing our understanding of energy expenditure in human motion.
Machine learning algorithms are widely used to analyze joint kinetics, providing a novel approach to assessing the biomechanical factors influencing athletic performance and injury risk [
18]. Furthermore, an editorial section in ‘Frontiers in Sports and Active Living’ [
19] discussed the integration of AI and machine learning in biomechanical research, highlighting how these technologies are reshaping the analysis and interpretation of complex biomechanical data. The incorporation of ANN models enables a more nuanced understanding of human movement, facilitating the development of targeted interventions and assistive technologies designed to optimize movement efficiency and reduce the risk of injury. Expanding on Takallou et al.’s work [
20], this research explores the potential of deep learning to elucidate complex biomechanical data connections. Their study, centered on distinguishing individuals with peripheral artery disease through gait analysis using acceleration data, exemplifies AI’s broad applicability, including biomechanics to support clinical decision making.
Based on the established groundwork, our research introduces two main hypotheses to advance the investigation into estimating metabolic costs using biomechanical data. First, we hypothesize that GRF signals, when analyzed through ANNs, can accurately estimate the metabolic cost associated with human locomotion. This hypothesis is predicated on the integral role that the GRF plays in reflecting the external forces acting on the body during movement, which are closely linked to the energetic demands of such activities. Second, we propose that joint moments—quantitative measures of the forces acting around the joints—can also be reliable predictors of metabolic cost when processed through an ANN. This hypothesis stems from the understanding that joint moments enclose the internal biomechanical dynamics, including muscle forces and their lever arms, which are key determinants of the metabolic energy required for movement. Our study rigorously tested these hypotheses to compare the effectiveness of the GRF and joint moments data in predicting metabolic cost, thus enriching our understanding of energy efficiency in human movement.
3. Results
The net
GRF, with a hidden layer size of six and input delays set to two, achieved significant (
p-value < 0.001) strong R-values across training, validation, and testing datasets, with the R-value of the training at 0.962, the R-value of the validation at 0.937, and the R-value of the test at 0.883 (
Figure 2 and
Table 1). These values indicate a robust correlation between the predicted and actual metabolic costs, underscoring the model’s efficacy. The MSEs were notably low, with training performance at 0.0036, validation performance at 0.0064, and test performance at 0.0140 in (W/kg)
2, further affirming the model’s precision (
Table 1).
The joint moments ANN model (net
Moment), with a more streamlined architecture featuring a hidden layer size of three and input delays of one, likewise exhibited solid predictive capabilities. The R-values for this model were similarly solid and significant (
p-value < 0.001), with the R-value of the training reaching 0.920, the R-value of the validation at 0.956, and the R-value of the test at 0.874 (
Figure 3 and
Table 1). These results highlight the model’s ability to estimate metabolic cost from joint moments data accurately.
The net
Momen model showed strong performance, achieving training, validation, and test scores of 0.0071, 0.0046, and 0.0121 in (W/kg)
2, respectively, underscoring its accuracy (
Figure 4b and
Table 1). An ‘epoch’ in machine learning, specifically in training ANNs, refers to one complete pass of the entire training dataset through the network [
15,
16]. The green circle in
Figure 4a,b symbolizes the epoch at which the model’s validation performance is at its peak.
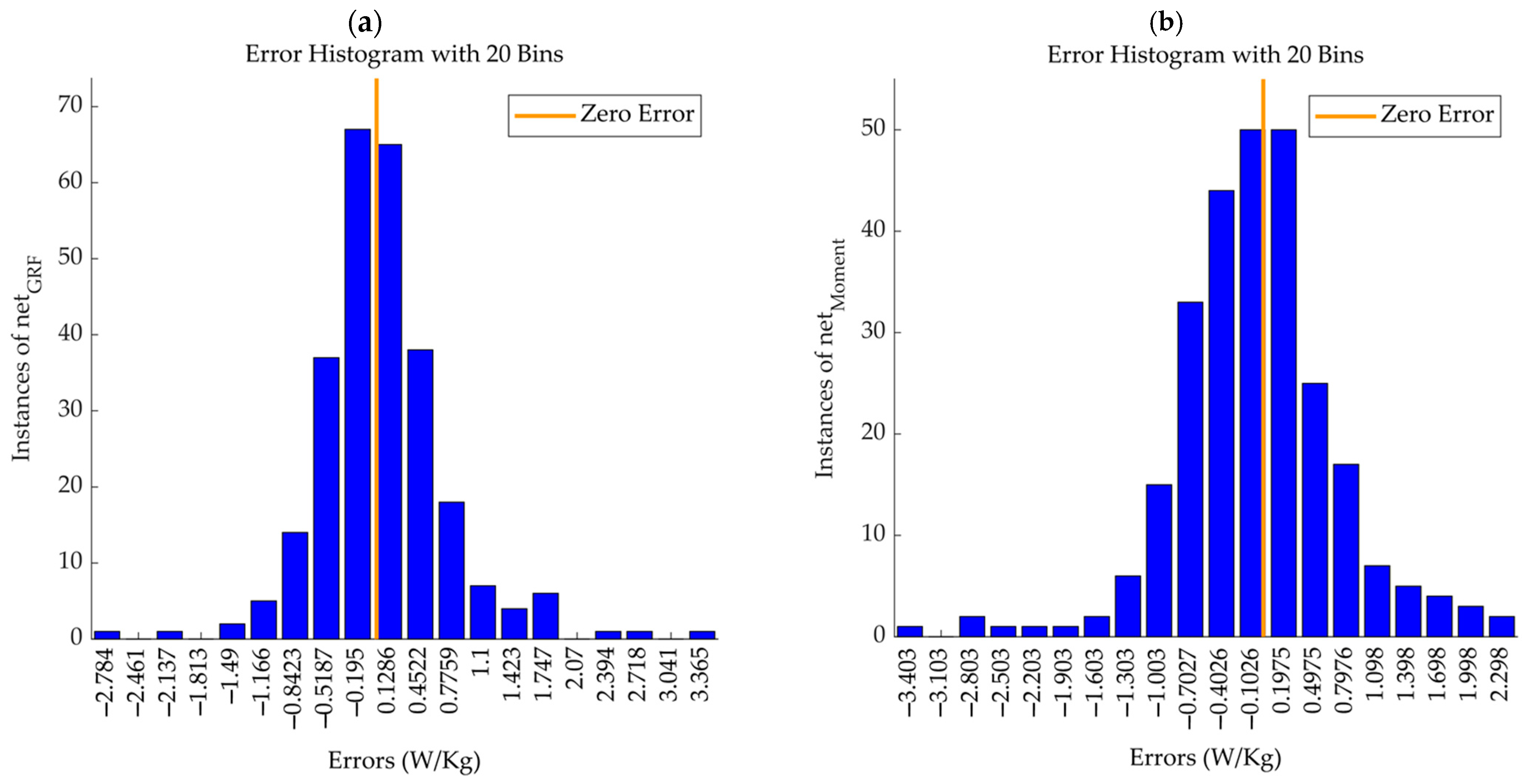
Figure 5 demonstrates the GRF and joint moment model error histograms (
Figure 5a and
Figure 5b, respectively). Comparing the two models, both demonstrated exceptional predictive abilities, as evidenced by their high R-values and low MSEs. The GRF model, despite its more complex network structure, did not significantly outperform the joint moments model in terms of R-values, suggesting that both the GRF and joint moments are valuable predictors of metabolic cost. However, the GRF model showed slightly better consistency across different performance metrics (MSEs and R-values), potentially offering a more versatile tool for estimating metabolic cost in varied applications.
To further our understanding of how specific phases within the gait cycle influence metabolic cost predictions, we employed the PDPs [
26,
27,
28]. This analysis was applied to GRF-based and moment-based networks to discern which gait cycle phases exert a more pronounced effect on the models’ predictive accuracy, as quantified by the RMSE. For the GRF-based network, we systematically varied the GRF vertical and anterior–posterior signals across different gait cycle percentages from zero to their maximum observed values. By isolating one percentage at a time and observing the resultant changes in the RMSE, we could pinpoint phases of the gait cycle that are critical for accurate metabolic cost estimation. The first two plots focus on the GRF vertical and AP directions, respectively (
Figure 6). Similarly, an analogous approach was undertaken for the moment-based network (
Figure 7).
4. Discussion
Our study aimed to advance the understanding of metabolic cost estimation through biomechanical data, focusing on the predictive capabilities of the GRF and joint moments using ANNs. We hypothesized that both the GRF and joint moments could accurately estimate metabolic costs. Our objective was to assess their comparative predictive power, offering insights into the biomechanics of energy efficiency in human locomotion. Our results supported these hypotheses, as the results indicate that both the GRF and moment ANN models can predict metabolic cost. The comparative analysis reveals that the net
GRF model, with more neurons in the hidden layer, showed slightly better overall performance and higher R-value of the training component (
p-value < 0.001) than the net
Moment model. However, the net
Moment model demonstrated a more robust correlation and significant R-value for the validation component (
p-value < 0.001), indicating potential differences in generalization capabilities. The net
GRF model resulted in a higher test performance error, suggesting possible overfitting compared to the net
Moment model, which had a more balanced error distribution across training, validation, and testing phases (
Table 1).
Determining the ‘best’ model between netGRF and netMoment depends on specific criteria and application needs. If predictive accuracy and lower training errors are prioritized, the netGRF model might be preferred due to its significant, stronger (p-value < 0.001) R-value in training and overall performance. However, for applications valuing generalization to unseen data, the netMoment model, with its stronger, significant validation (p-value < 0.001) R-value, could be more suitable, despite its slightly lower overall R-value. The choice ultimately hinges on whether the focus is on training accuracy or validation performance.
The GRF model demonstrates higher accuracy and superior performance across the other evaluation metrics (accuracy, recall, precision, F1 score, and k-fold cross-validation) compared to the moment prediction model (
Table 1). This indicates that the GRF model provides more reliable and precise predictions, making it a more effective tool for our study’s objectives.
The regression analysis for the net
GRF model across ‘validation’, ‘test’, ‘training’, and ‘all’ datasets (
Figure 2) illustrates a robust linear relationship between the predicted and actual metabolic costs, with the R-values serving as a quantitative measure of this relationship. Strong R-values across all subsets suggest that the net
GRF model has learned the underlying patterns effectively and can generalize well to new data. The closeness of data points to the line where predicted values match actual values in the plots signifies the model’s precision. This is particularly evident in the validation subset, where a close alignment highlights the model’s accuracy with validation data. Similarly, the regression analysis for the net
Moment model (
Figure 3) demonstrates that while the overall trend of the data points suggests a reasonable fit, the spread of the points around the line of unity is more pronounced than in the net
GRF model, especially in the ‘test’ subset, as indicated by the lower R-value. This suggests that while the net
Moment model has learned to an extent, its predictive performance may not be as robust as the net
GRF model when applied to new data.
Figure 2 and
Figure 3 underscore the nuanced differences in the performance of the two models. The net
GRF model’s stronger R-values imply a more reliable predictive model for estimating metabolic costs from biomechanical data. The data points’ distribution to the fit line and the line of unity across all plots serves as a graphical testament to the net
GRF model’s superior ability to capture the essential patterns of the underlying biomechanical processes.
In
Figure 4, the training and validation performance plots for the net
GRF and net
Moment models offer critical insights into the learning dynamics of each network.
Figure 4a demonstrates a consistent decrease in the MSE for the net
GRF model as the number of epochs increases, with the best validation performance occurring at epoch 9. This suggests that the net
GRF model is effectively learning the underlying patterns in the data without signs of significant overfitting, as indicated by the convergence of training and validation error rates.
Figure 4b, on the other hand, illustrates the net
Moment model’s learning progression, with the best validation performance achieved at an earlier epoch, epoch 6. The green circle indicates a key moment where the validation error minimizes before the test error rises, which may signal the onset of overfitting. This point is crucial for model tuning, as it identifies the epoch after which the model may start to learn noise from the training data rather than underlying trends, reducing its generalization performance on new data. The comparative analysis of these learning curves informs the model selection process, guiding the implementation of early stopping or other regularization techniques to optimize model performance.
The error histograms presented in
Figure 5 for both the net
GRF and net
Moment models visually represent the variance between predicted and actual metabolic costs.
Figure 5a shows a concentration of errors closer to zero for the net
GRF model, indicating a tighter clustering of predicted values around the actual metabolic costs and, consequently, a higher accuracy. In contrast,
Figure 5b shows a broader spread of errors for the net
Moment model, implying a greater variance in the accuracy of predictions. The histograms assist in pinpointing areas where predictions consistently deviate from actual values and identifying outlier errors, which can be pivotal for subsequent model refinements. This graphical analysis of error distribution is instrumental in assessing the predictive performance of the models, guiding efforts to optimize them for enhanced accuracy in estimating metabolic costs.
Our findings, demonstrating a solid predictive relationship between the GRF, biomechanical measurements, and metabolic costs in human walking, align with other studies ([
1,
32]). The superior performance of our net
GRF model, demonstrated by stronger R-values and lower MSEs, resonates with the understanding that the GRF, due to its direct relationship with the external forces during locomotion, can provide a more reliable estimate of metabolic cost compared to joint moments. This is further exemplified in our study, where the net
GRF model showed a slightly better consistency across various performance metrics, highlighting its robustness and potential as a versatile tool for biomechanical analysis and intervention design to optimize human movement efficiency.
In the current study, the RMSE across the gait cycle for both the GRF and joint moment models reveals the prediction accuracy at various gait cycle phases. This illustrates the variability in predicted metabolic cost based on biomechanical parameters at different stages of gait. The variability and consistency of these predictions are illustrated through the standard deviation of the RMSE, depicted as vertical lines in
Figure 6 and
Figure 7. Our models analyze data from various gait cycle phases, enhancing prediction accuracy and providing a complete view of energy efficiency in movement. This approach ensures the models’ effectiveness in real-world scenarios, capturing the full complexity of the gait cycle for precise metabolic cost estimations.
A study by Gonabadi et al. [
5] presents the stride average metabolic rate and the time profile of the metabolic rate during different walking conditions. They focused on estimating the stride average metabolic rate and creating a time profile of the metabolic rate during different walking conditions using two methods: musculoskeletal estimation and joint-space estimation. Our study and the previous research found that the push-off phase in the gait cycle generates the largest peaks for both the metabolic cost time profile and the RMSEs. Additionally, a notable peak occurs at approximately 17% of the gait cycle in
Figure 6c and
Figure 7d, corresponding to the peak in the joint-space model’s metabolic cost time profile in Gonabadi et al.’s study [
5]. Moreover, using the musculoskeletal method, the single support phase had the highest metabolic cost. In contrast, the joint-space method estimated the highest metabolic cost during the second double-support phase [
5]. Our results are within this range, corresponding to 38% and 50% of the gait cycle (
Figure 6c and
Figure 7d).
Our method can have practical applications, including identifying and characterizing gait disabilities by pinpointing the most energy-intensive phase of the stride cycle in patients, devising targeted rehabilitation exercises, such as treadmill walking, with robotic resistance during the least metabolically efficient phase of the stride cycle, and contributing to the engineering of efficient assistive devices, like designing an exoskeleton that aids the least economically efficient phase of the stride cycle. It may pose a challenge to characterize the time profile of metabolic cost in individual patients due to limited walking endurance. Therefore, a future challenge involves developing methods that enable the characterization of the time profile of metabolic cost with shorter experimental protocols for patients, potentially by integrating our method with other approaches, such as simulation [
5,
7,
8] or blood flow measurements [
33,
34]. To address the stability and reliability of our ANN model, we suggest continuous performance monitoring, periodic re-evaluation, and retraining using new data.
This study faces limitations beyond its potential overfitting due to its small sample and potential biases, including the specific design of the ANN models for particular datasets, which may limit their use in broader populations or different biomechanical contexts. The models might also simplify the complex nature of movements, focusing mainly on vertical and parallel GRF signals and lower body joints, potentially neglecting essential elements, like lateral movements and upper body contributions. This could restrict a comprehensive view of biomechanical efficiency and energy use. Furthermore, excluding three-dimensional joint data and other GRF directions rather than vertical and anterior–posterior might be a constraint. This study utilized data from two separate experiments, both conducted at a constant walking speed of 1.25 m/s on a treadmill. One dataset included variations in outsole geometry, slopes, and treadmill inclination, while the other involved walking on a level treadmill with an exoskeleton providing different hip assistance timings. As a limitation, future studies should consider incorporating different walking speeds, overground walking, and various surface textures to further generalize the ANN model.


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}