
A Novel Techno-Economical Control of UPFC against Cyber-Physical Attacks Considering Power System Interarea Oscillations
Abstract
:1. Introduction
1.1. Importance
1.2. Literature Review
1.3. Research Gaps
1.4. Contributions
- Real-time coordination framework: This paper introduces a real-time online framework that optimally coordinates a power system stabilizer (PSS), power oscillation damper (POD), and unified power flow controller (UPFC). The framework aims to reduce generation and operation costs while preventing system instability. This coordination is achieved through the utilization of a multi-objective Harris hawks optimization (MHHO) algorithm, which focuses on mitigating low-frequency oscillations and ensuring the economical operation of the power system.
- Enhanced resilience:The proposed framework enhances the power system’s resilience against transient disturbances caused by cyber-physical attacks. This is achieved by adjusting power flow in transmission lines and changing the generation points of the generators.
- Comprehensive optimization:The framework takes into account technical performance indicators of power systems, such as voltage fluctuations and power losses, in addition to economic objectives. This holistic approach ensures the optimal dynamic coordination of the UPFC and PSS.
1.5. Organization
2. Conceptual Model
3. Mathematical and Problem Formulations
3.1. Power System Modeling with UPFCs and PSSs
3.1.1. Generator Modeling
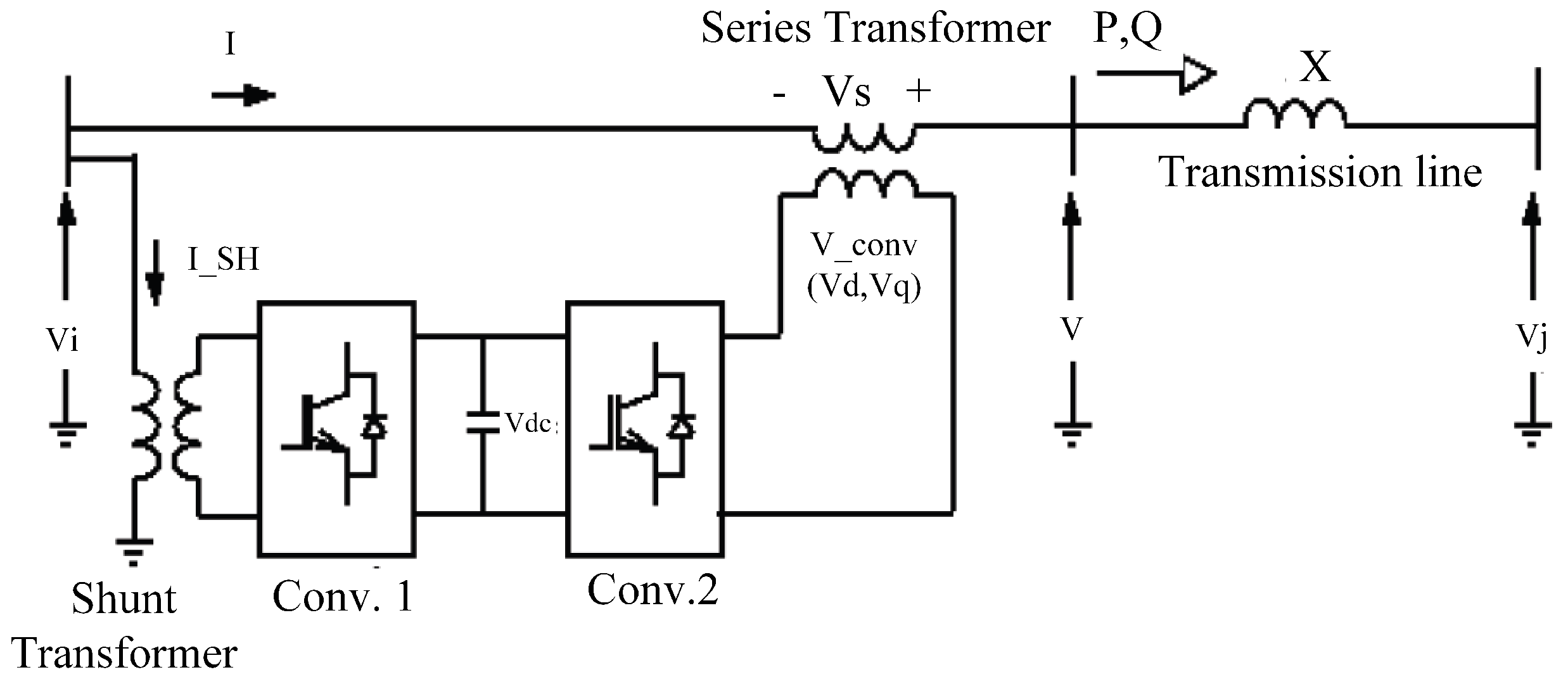
3.1.2. UPFC Modeling
- VSC employing GTO-based square-wave inverters and specialized interconnection transformers: Typically, four three-level inverters are utilized to create a 48-step voltage waveform. Special interconnection transformers are employed to mitigate the harmonics present in the square waves produced by individual inverters. In this VSC type, the fundamental voltage component is directly proportional to the voltage Vdc. Consequently, Vdc must be adjusted to control the injected voltage.
- VSC employing IGBT-based Pulse-Width Modulation (PWM) inverters: This inverter type employs PWM techniques to synthesize a sinusoidal waveform from a DC voltage, typically with a chopping frequency in the kilohertz range. Harmonics are eliminated by installing filters on the AC side of the VSC. Unlike the GTO-based VSC, this type maintains a fixed DC voltage (). To vary the voltage, adjustments are made to the modulation index of the PWM modulator.
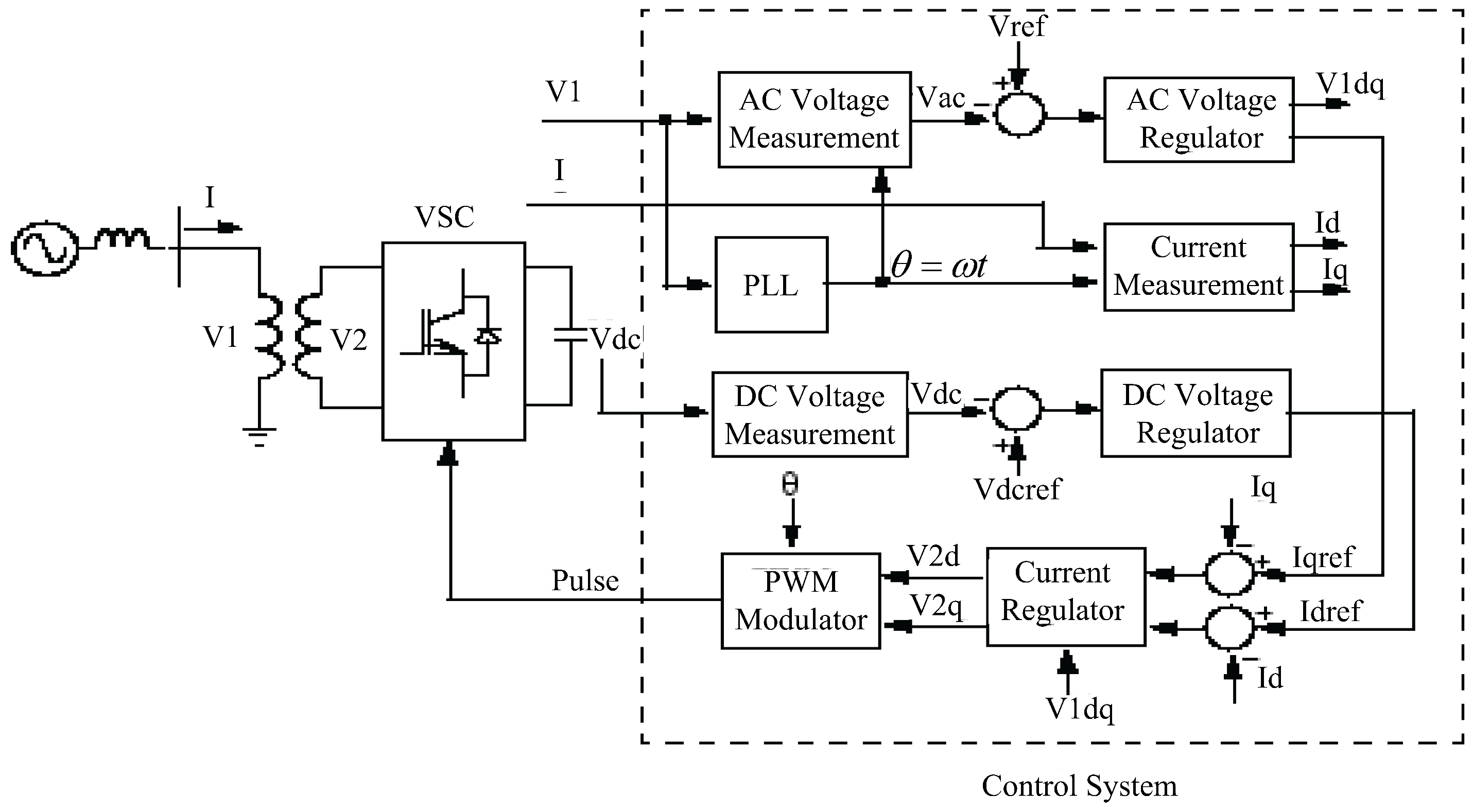
Control Framework of Shunt and Series Converter
- A phase-locked loop (PLL) that synchronizes with the positive-sequence component of the three-phase primary voltage (). The PLL output (angle) is used to calculate the direct-axis and quadrature-axis components of the AC three-phase voltage and currents (referred to as , , , and in the diagram).
- Measurement systems that capture the d and q components of the AC positive-sequence voltage, the currents to be controlled, and the DC voltage ().
- An outer regulation loop, which encompasses an AC voltage regulator and a DC voltage regulator. The AC voltage regulator’s output is the reference current () for the current regulator. represents the current in quadrature with voltage and controls reactive power flow. The DC voltage regulator’s output is the reference current () for the current regulator, where is the current in phase with voltage and regulates active power flow.
- An inner current regulation loop, comprising a current regulator. This current regulator manages the magnitude and phase of the voltage generated by the PWM converter (V2d and V2q) based on the reference currents, i.e., and , which are produced by the DC voltage regulator and the AC voltage regulator, respectively (in voltage control mode). The current regulator is further supported by a feed-forward-type regulator that predicts the V2 voltage output ( and ) based on the measurements ( and ) and the transformer leakage reactance.
3.2. Proposed Approach based on the Coordinated Control of PSS and UPFC
3.3. Objective Function Formulation
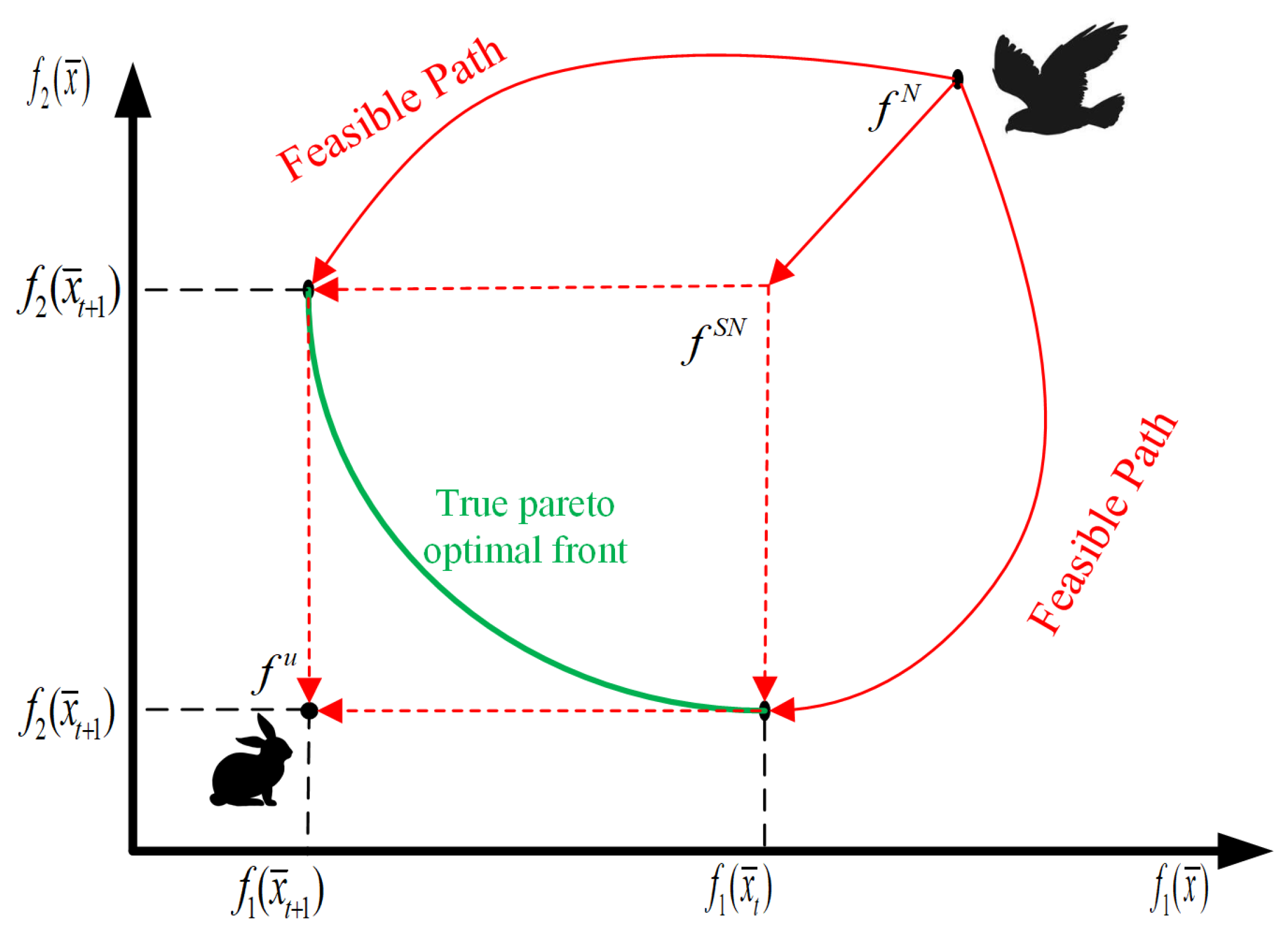
4. Developed Multi-Objective Optimization Method Based on Harris Hawks
5. Simulation Results and Discussion
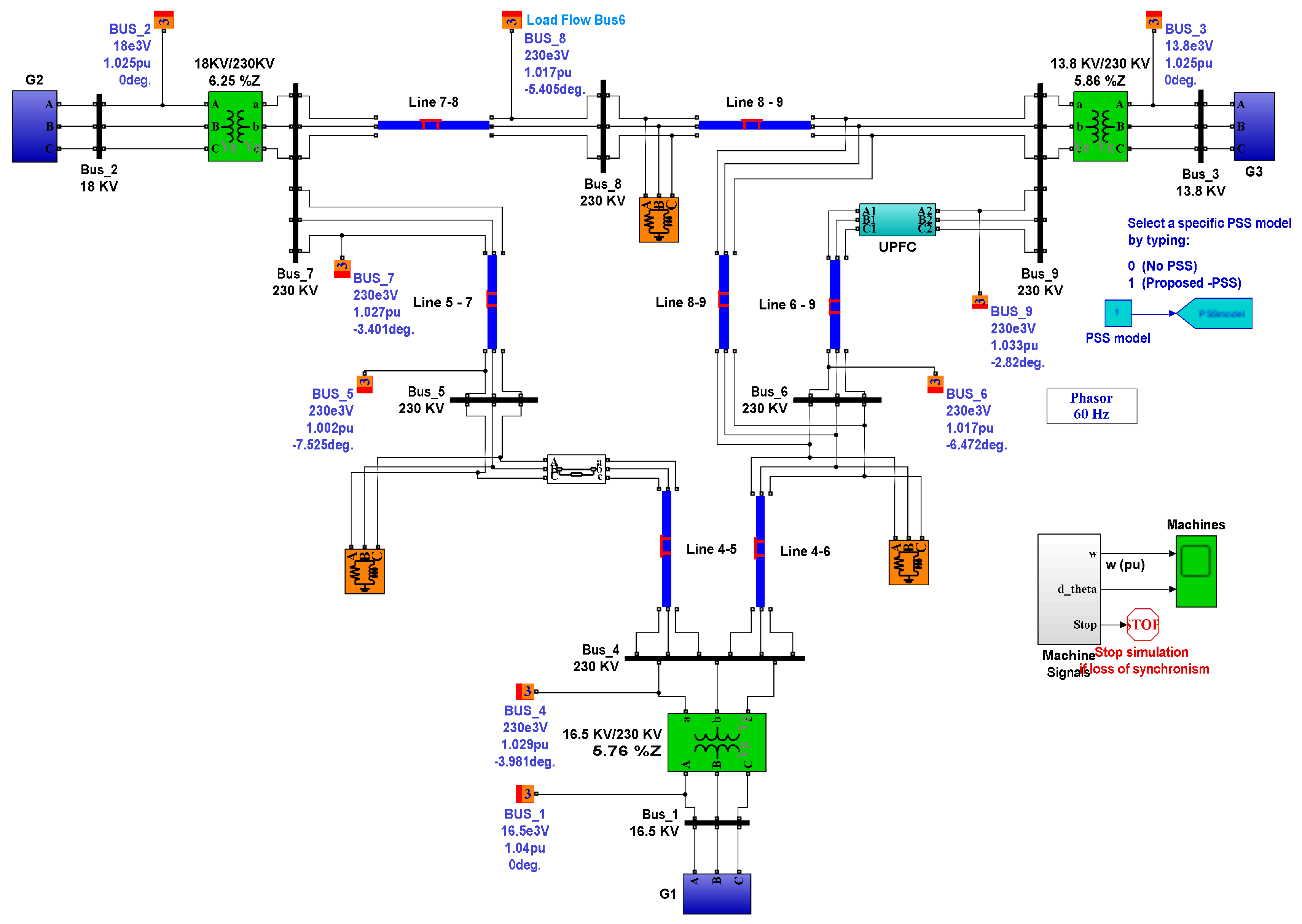
5.1. IEEE Nine-Bus Case Study
5.2. IEEE 39-Bus Case Study
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UPFC | Unified Power Flow Controller |
| PSS | Power System Stabilizer |
| MOHH | Multi-Objective Harris Hawks |
| FACTS | Flexible Alternating Current Transmission System |
| LFO | Low-Frequency Oscillation |
| POD | Power Oscillation Damping |
| PWM | Pulse-Width Modulation |
| ALO | Ant Lion Optimization |
| DECL | Developed epsilon-constraint and lexicographic methods |
| AVR | Automatic Voltage Regulator |
| IUPFC | Interline Unified Power Flow Controller |
| STATCOM | Static Synchronous Compensator |
| SMIB | Single Machine, Infinite Bus |
| VSC | Voltage-Sourced Converter |
| PSO | Particle Swarm Optimization |
| PLL | Phase-Locked Loop |
| Sending-side voltage in area 1 | |
| Receiving-side voltage in area 2 | |
| Sending-side active power in area 1 | |
| Receiving-side active power in area 2 | |
| Active power reference of series controller in UPFC | |
| Reactive power reference of series controller in UPFC | |
| d-axis reference voltage of shunt controller in UPFC | |
| q-axis reference voltage of shunt controller in UPFC | |
| Voltage induced into the power line by the series converter of UPFC | |
| L | Equivalent inductance in receiving side of power network |
| Coefficient controller of UPFC | |
| Coefficient controller of PSS | |
| d-axis voltage of generator | |
| q-axis voltage of generator | |
| Equivalent resistance of the stator in the generator | |
| d-axis current of the stator in the generator | |
| q-axis current of the stator in the generator | |
| d-axis magnetic flux of the stator in the generator | |
| q-axis magnetic flux of the stator in the generator | |
| Rotor angular velocity | |
| Derivative d-axis voltage of the generator | |
| Derivative q-axis voltage of the generator | |
| Derivative of equivalent d-axis resistance of the generator’s stator | |
| Derivative of equivalent q-axis resistance of the generator’s stator | |
| Derivative d-axis current of the generator’s stator | |
| Derivative q-axis current of the generator’s stator | |
| Derivative d-axis magnetic flux of the generator’s stator | |
| Derivative d-axis magnetic flux of the generator’s stator | |
| Derivative q-axis magnetic flux of the generator’s stator | |
| d-axis inductance of the generator | |
| q-axis inductance of the generator | |
| d-axis mutual inductance of the generator | |
| q-axis mutual inductance of the generator |
References
- He, P.; Shen, R.; Wen, F.; Pan, Q. Coordinated optimization of parameters of PSS and UPFC-PODCs to improve small-signal stability of a power system with renewable energy generation. J. Energy Eng. 2021, 147, 04020089. [Google Scholar] [CrossRef]
- Kumar, H.; Singh, P.R. Coordinated control of TCSC and UPFC to aid damping oscillations in the power system. Int. J. Electron. 2019, 106, 1938–1963. [Google Scholar] [CrossRef]
- Solomon, E.; Khan, B.; Boulkaibet, I.; Neji, B.; Khezami, N.; Ali, A.; Mahela, P.O.; Pascual Barrera, A.E. Mitigating Low-Frequency Oscillations and Enhancing the Dynamic Stability of Power System Using Optimal Coordination of Power System Stabilizer and Unified Power Flow Controller. Sustainability 2023, 15, 6980. [Google Scholar] [CrossRef]
- Rana, J.M.; Shahriar, S.M.; Shafiullah, M. Levenberg? Marquardt neural network to estimate UPFC-coordinated PSS parameters to enhance power system stability. Neural Comput. Appl. 2019, 31, 1237–1248. [Google Scholar] [CrossRef]
- Siddique, A.; Xu, Y.; Aslam, W. Enhancement of power quality and transient stability margin in coordination with UPFC and MB-PSS controller. In Proceedings of the 2018 International Conference on Mechatronic Systems and Robots, Singapore, 25–27 May 2018; pp. 30–36. [Google Scholar]
- Niu, Y. Coordinated Optimization of Parameters of PSS and UPFC-PODCs to Improve Small-Signal Stability of a Power System with Renewable Energy Generation. In Proceedings of the 2021 11th International Conference on Power, Energy and Electrical Engineering (CPEEE), Shiga, Japan, 26–28 February 2021; pp. 249–254. [Google Scholar] [CrossRef]
- Shafiullah, M.; Rana, J.M.; Shahriar, S.M.; Zahir, H.M. Low-frequency oscillation damping in the electric network through the optimal design of UPFC coordinated PSS employing MGGP. Measurement 2019, 138, 118–131. [Google Scholar] [CrossRef]
- Shahriar, S.M.; Shafiullah, M.; Rana, J.M. Stability enhancement of PSS-UPFC installed power system by support vector regression. Electr. Eng. 2018, 100, 1601–1612. [Google Scholar] [CrossRef]
- Neda, M.O. Optimal coordinated design of PSS and UPFC-POD using DEO algorithm to enhance damping performance. Int. J. Electr. Comput. Eng. 2020, 10, 6111–6121. [Google Scholar] [CrossRef]
- Fortes, V.E.; Martins, B.F.L.; Miotto, L.E.; Araujo, B.P.; Macedo, H.L.; Romero, R. Bio-Inspired Metaheuristics Applied to the Parametrization of PI, PSS, and UPFC?POD Controllers for Small-Signal Stability Improvement in Power Systems. J. Control. Autom. Electr. Syst. 2023, 34, 121–136. [Google Scholar] [CrossRef]
- MaleRizi, K.M.; Abazari, S.; Mahdian, N. Dynamic Stability Improvement of Power System with Simultaneous and Coordinated Control of DFIG and UPFC using LMI. Int. J. Ind. Electron. Control Optim. 2021, 4, 341–353. [Google Scholar]
- ToolaMoghadam, B.A.; Aghahadi, M.; Eslami, M.; Rashidi, S.; Arandian, B.; Nikolovski, S. Adaptive rat swarm optimization for optimum tuning of SVC and PSS in a power system. Int. Trans. Electr. Energy Syst. 2022, 2022, 4798029. [Google Scholar]
- Hossen, S.M.; Islam, R.M.; Shafiullah, M.; Fahim-Ul-Haque, M.; Ali, A. Tunicate swarm algorithm for power system stability enhancement in a SMIB-UPFC network. In Proceedings of the 2022 Second International Conference on Artificial Intelligence and Smart Energy (ICAIS), Coimbatore, India, 23–25 February 2022; pp. 1767–1772. [Google Scholar]
- Zamani, M.; Shahgholian, G.; Fathollahi, A.; Mosavi, A.; Felde, I. Improving Interarea Mode Oscillation Damping in Multi-Machine Energy Systems through a Coordinated PSS and FACTS Controller Framework. Sustainability 2023, 15, 16070. [Google Scholar] [CrossRef]
- Sabo, A.; Wahab, N.I.A.; Othman, M.L. Coordinated design of PSS and IPFC using FFA to control low frequency oscillations. In Proceedings of the 2021 IEEE 19th Student Conference on Research and Development, Kota Kinabalu, Malaysia, 23–25 November 2021; pp. 201–206. [Google Scholar]
- Alwan, O.H. A novel approach for coordinated design of TCSC controller and PSS for improving dynamic stability in power systems. Period. Eng. Nat. Sci. 2023, 11, 102–116. [Google Scholar] [CrossRef]
- Ming, L.; Yang, S.; Fei, L.; Shicun, L.; Shilong, W.; Xiankun, Q.; Yihui, L.; Chengning, L. Research on Controlled Series Complementary and PSS Coordinated Damping Control Method. In Proceedings of the 2022 Asian Conference on Frontiers of Power and Energy (ACFPE), Coimbatore, India, 23–25 February 2022; pp. 540–545. [Google Scholar]
- Darabian, M.; Bagheri, A.; Behzadpoor, S. A UPFC-based robust damping controller for optimal use of renewable energy sources in modern renewable integrated power systems. IET Gener. Transm. Distrib. 2022, 16, 4115–4131. [Google Scholar] [CrossRef]
- Hossen, S.M.; Haque, U.F.M. Tunicate Swarm Algorithm and Bat Algorithm for Power System Stability Enhancement in A Smib-Upfc Network; Department of Electrical and Electronic Engineering: Kota Kinabalu, Malaysia, 23–25 November 2021. [Google Scholar]
- Asad, M. Improving Power Flow Using Static Synchronous Series Compensator, The Egyptian International Journal of Engineering Sciences and Technology. Electr. Eng. 2021, 33, 69–74. [Google Scholar]
- Afaq, U.; Ali, F.; Hasan, A.; Rana, A.I.; Asif, M. Non-linear Synergetic Control of UPFC for Efficient Damping of Local and Inter-Area Oscillations. IEEE Trans. Power Syst. 2023, 39, 2106–2114. [Google Scholar] [CrossRef]
- Devarapalli, R.; Sinha, N.K.; García Márquez, F.P. A review on the computational methods of power system stabilizer for damping power network oscillations. Arch. Comput. Methods Eng. 2022, 29, 3713–3739. [Google Scholar] [CrossRef]
- Biswal, S.S.; Swain, R.D.; Rout, K.P. Inter-area and intra-area oscillation damping for UPFC in a multi-machine power system based on tuned fractional PI controllers. Int. J. Dyn. Control. 2022, 10, 1594–1612. [Google Scholar] [CrossRef]
- Mushtaq, B.; Mufti, M. Coordinated operation of fuzzy-based TCSC and SMES for low-frequency oscillation damping in interconnected power systems. Int. J. Circuit Theory Appl. 2023, 51, 2912–2941. [Google Scholar] [CrossRef]
- Kumar, A.; Bhadu, M. Wide-area damping control system for large wind generation with multiple operational uncertainty. Electr. Power Syst. Res. 2022, 213, 108755. [Google Scholar] [CrossRef]
- Radwan, M.M.; Azmy, M.A.; Ali, E.G.; ELGebaly, E.A. Optimal design and control loop selection for a STATCOM wide-area damping controller considering communication time delays. Int. J. Electr. Power Energy Syst. 2023, 149, 109056. [Google Scholar] [CrossRef]
- Eslami, M.; Babaei, B.; Shareef, H.; Khajehzadeh, M.; Arandian, B. Optimum design of damping controllers using modified Sperm swarm optimization. IEEE Access 2021, 9, 145592–145604. [Google Scholar] [CrossRef]
- Naghshbandy, H.A.; Faraji, A. Coordinated design of PSS and unified power flow controller using the combination of CWT and prony methods with the help of SPEA II multi-objective optimisation algorithm. IET Gener. Transm. Distrib. 2019, 13, 4900–4909. [Google Scholar] [CrossRef]
- Kamarposhti, A.M.; Colak, I.; Iwendi, C.; Band, S.S.; Ibeke, E. Optimal coordination of PSS and SSSC controllers in power system using ant colony optimization algorithm. J. Circuits, Syst. Comput. 2022, 31, 2250060. [Google Scholar] [CrossRef]
- Movahedi, A.; Niasar, H.A.; Gharehpetian, G. Designing SSSC, TCSC, and STATCOM controllers using AVURPSO, GSA, and GA for transient stability improvement of a multi-machine power system with PV and wind farms. Int. J. Electr. Power Energy Syst. 2019, 106, 455–466. [Google Scholar] [CrossRef]
- Shafiullah, M.; Pathan, M.; Shahriar, S.M.; Ali, A.; Hossain, I.M.; Alam, S.M. Real-time solution of PSS parameter tuning by GA-ANFIS in stabilizing the electrical power system. Arab. J. Sci. Eng. 2023, 48, 6925–6938. [Google Scholar] [CrossRef]
- He, P.; Pan, Z.; Fan, J.; Tao, Y.; Wang, M. Coordinated design of PSS and multiple FACTS devices based on the PSO-GA algorithm to improve the stability of wind–PV–thermal-bundled power system. Electr. Eng. 2023, 106, 2143–2157. [Google Scholar] [CrossRef]
- Al-Zaidi, W.K.M.; Inan, A. Optimal Placement of Battery Swapping Stations for Power Quality Improvement: A Novel Multi Techno-Economic Objective Function Approach. Energies 2023, 17, 110. [Google Scholar] [CrossRef]
- Khadanga, K.R.; Satapathy, K.J. Time delay approach for PSS and SSSC based coordinated controller design using hybrid PSO–GSA algorithm. Int. J. Electr. Power Energy Syst. 2015, 71, 262–273. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Kamboj, K.V.; Nandi, A.; Bhadoria, A.; Sehgal, S. An intensify Harris Hawks optimizer for numerical and engineering optimization problems. Appl. Soft Comput. 2020, 89, 106018. [Google Scholar] [CrossRef]
- Hossain, A.M.; Noor, M.R.; K-Yau, A.L.; Azzuhri, R.S.; Z’Abar, M.R.; Ahmedy, I.; Jabbarpour, M.R. Multi-objective Harris hawks optimization algorithm based 2-Hop routing algorithm for CR-VANET. IEEE Access 2021, 9, 58230–58242. [Google Scholar] [CrossRef]
- Nallagalva, K.S.; Kirar, K.M.; Agnihotri, G. Transient stability analysis of the IEEE 9-bus electric power system. Int. J. Sci. Eng. Technol. 2012, 1, 161–166. [Google Scholar]
- He, P.; Fang, Q.; Jin, H.; Ji, Y.; Gong, Z.; Dong, J. Coordinated design of PSS and STATCOM-POD based on the GA-PSO algorithm to improve the stability of wind-PV-thermal-bundled power system. Int. J. Electr. Power Energy Syst. 2022, 141, 108208. [Google Scholar] [CrossRef]
- Diniz Costa Filho, R.N.; Paucar, V.L. Robust and coordinated tuning of PSS and FACTS-PODs of interconnected systems considering signal transmission delay using ant lion optimizer. J. Control. Autom. Electr. Syst. 2018, 29, 625–639. [Google Scholar] [CrossRef]
- Solomon, E. Damping of Low Frequency Oscillation through Optimal Sizing of Unified Power Flow Controller and Power System Stabilizer Employing Antlion Optimization. Energies 2022, 15, 3809. [Google Scholar]
- Ramos, A.R.; Kuiava, R.; Fernandes, C.T.; Pataca, C.L.; Mansour, R.M. IEEE PES Task Force on Benchmark Systems for Stability Controls; Tech. Rep.; Version 4.0; Pacific Northwest National Laboratory: Richland, WA, USA, 20 June 2014; pp. 1–49. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indexes | Operating Cost ($) | Speed Deviation (pu) | Voltage Deviation (pu) | CPU-Time for Optimization | Number of Iterations | |
|---|---|---|---|---|---|---|
| Disturbance | ||||||
| Line outage between buses 4 and 5 | PM | 1107.48 | 0.00017 | 0.1714 | 122.1 | 21 |
| ✓ | ✓ | ✓ | ||||
| [32,39] | 1107.96 | 0.00256 | 0.1942 | 186.45 | 32 | |
| ✗ | ✓ | ✗ | ||||
| [3,40,41] | 1107.98 | 0.00186 | 0.2032 | 245 | 49 | |
| ✗ | ✓ | ✗ | ||||
| Line outage between buses 7 and 8 | PM | 1112.52 | 0.00011 | 0.1218 | 122.1 | 21 |
| ✓ | ✓ | ✓ | ||||
| [32,39] | 1113.84 | 0.00341 | 0.1621 | 186.45 | 32 | |
| ✗ | ✓ | ✗ | ||||
| [3,40,41] | 1113.72 | 0.00262 | 0.3245 | 245 | 49 | |
| ✗ | ✓ | ✗ | ||||
| Line outage between buses 6 and 9 | PM | 1101.41 | 0.00056 | 0.1023 | 122.1 | 21 |
| ✓ | ✓ | ✓ | ||||
| [32,39] | 1102.82 | 0.00423 | 0.1851 | 186.45 | 32 | |
| ✗ | ✓ | ✗ | ||||
| [3,40,41] | 1103.05 | 0.00384 | 0.3521 | 245 | 49 | |
| ✗ | ✓ | ✗ |
| Indexes | Operating Cost (USD) | Speed Deviation (pu) | Voltage Deviation (pu) | CPU-Time for Optimization | Number of Iterations | |
|---|---|---|---|---|---|---|
| Disturbance | ||||||
| Line outage between buses 4 and 14 | PM | 1999.66 | 0.00054 | 0.1961 | 1119.25 | 48 |
| ✓ | ✓ | ✓ | ||||
| [32,39] | 199.93 | 0.0010 | 1.015 | 2541.3 | 62 | |
| ✗ | ✓ | ✗ | ||||
| [3,40,41] | 1999.95 | 0.0011 | 1.018 | 2812 | 71 | |
| ✗ | ✓ | ✗ | ||||
| Line outage between buses 2 and 39 | PM | 2024.31 | 0.00041 | 0.1218 | 1119.25 | 48 |
| ✓ | ✓ | ✓ | ||||
| [32,39] | 2042.64 | 0.00541 | 0.954 | 2541.3 | 62 | |
| ✗ | ✓ | ✗ | ||||
| [3,40,41] | 2032.21 | 0.00627 | 0.971 | 2812 | 71 | |
| ✗ | ✓ | ✗ | ||||
| Line outage between buses 25 and 26 | PM | 1959.72 | 0.00042 | 0.1831 | 1119.25 | 48 |
| ✓ | ✓ | ✓ | ||||
| [32,39] | 1962.28 | 0.00217 | 1.0618 | 2541.3 | 62 | |
| ✗ | ✓ | ✗ | ||||
| [3,40,41] | 1960.63 | 0.00451 | 1.0279 | 2812 | 71 | |
| ✗ | ✓ | ✗ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mosleh, M.A.M.; Umurkan, N. A Novel Techno-Economical Control of UPFC against Cyber-Physical Attacks Considering Power System Interarea Oscillations. Appl. Sci. 2024, 14, 5254. https://doi.org/10.3390/app14125254
Mosleh MAM, Umurkan N. A Novel Techno-Economical Control of UPFC against Cyber-Physical Attacks Considering Power System Interarea Oscillations. Applied Sciences. 2024; 14(12):5254. https://doi.org/10.3390/app14125254
Chicago/Turabian StyleMosleh, Muntasser Ahmed Mosleh, and Nurettin Umurkan. 2024. "A Novel Techno-Economical Control of UPFC against Cyber-Physical Attacks Considering Power System Interarea Oscillations" Applied Sciences 14, no. 12: 5254. https://doi.org/10.3390/app14125254