
Research on Fault Prediction Method for Electric Multiple Unit Gearbox Based on Gated Recurrent Unit–Hidden Markov Model


Abstract
:1. Introduction
2. GRU-HMM Fault Prediction Model
2.1. Demand Analysis of GRU-HMM Fault Prediction Model
2.2. Hidden Markov Fault Prediction Model
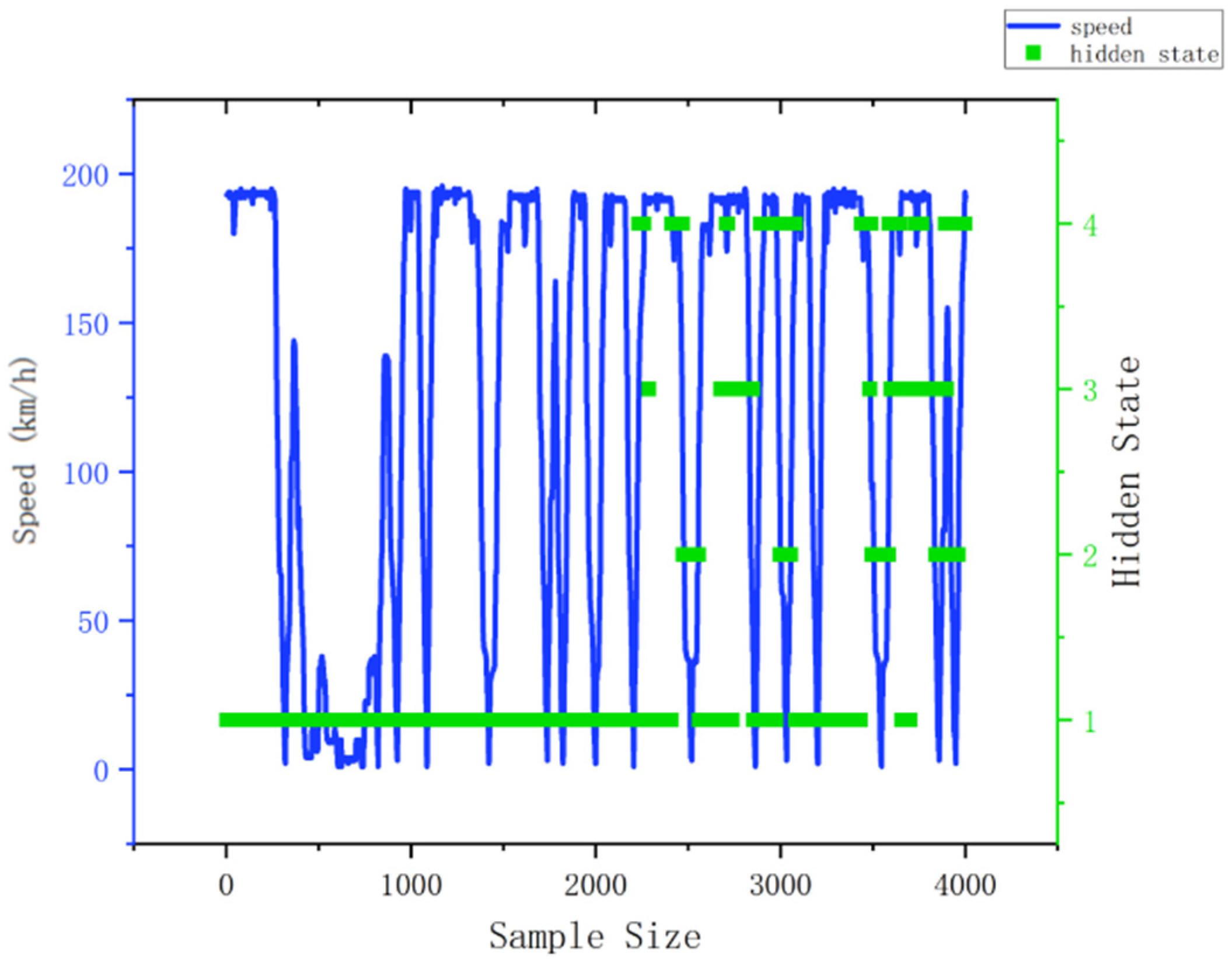
- The hidden state Q is defined as Q = {normal state, universal joint degradation, driving gear degradation, driven gear degradation}, representing the hidden fault states of the CRH5 gearbox; here, the hidden state N = 4.
- Observable state O, denoted as O = {o1, o2, …, oN}, where oi ϵ (v1, v2, …, vt), is a dataset for monitoring the operating status of the CRH5. Here, observable state vt is a feature vector capturing the data characteristics of the train running up to the moment t under the four hidden states mentioned above.
- Initial vector π,indicates the probability that the degraded state of the component occurs at the initial time, where C(i) is the probability that the initial state is qi.
- State transition matrix ,denotes the transfer probability of the gearbox component from state si to state sj.
- Confusion matrix B,indicates the probability of occurrence of eigenvector vi in state si at train operating moment t.
2.3. GRU Updates the HMM Input State Vector
- Construct an initial failure probability output layer, using gearbox operation monitoring data as training set, calculate the output conditional probability for each fault type using the Softmax activation function. The output updates the initial vector of the HMM,where Vi is the weighting factor for each fault type and n is the number of hidden states in the gearbox.
- Calculate the reset gate, which calculates the amount of stage information to be forgotten by the eigenvalues and fault type output probabilities from the previous time step,where Rt denotes the reset vector; Xi denotes the fault eigenvalue; Ht−1 denotes the hidden state of the fault type at the previous time step; br denotes the weight parameter; and σ is a sigmoid function with the value range of (0,1).
- Calculate the intermediate state values and calculate the proportion of stage information propagated by the quantity product of the reset vector and the fault output probability,where denotes the intermediate state value and bh denotes the weighting parameter.
- Calculate the update gate, which calculates the amount of stage information to be retained by the fault characterization value and the fault type output probability from the previous time step,where Zt denotes the update vector and bz denotes the weight parameter.
- Calculate the output value, which is used as the state transition matrix to update the parameters of the HMM,where Ht denotes the output state vector at time t.
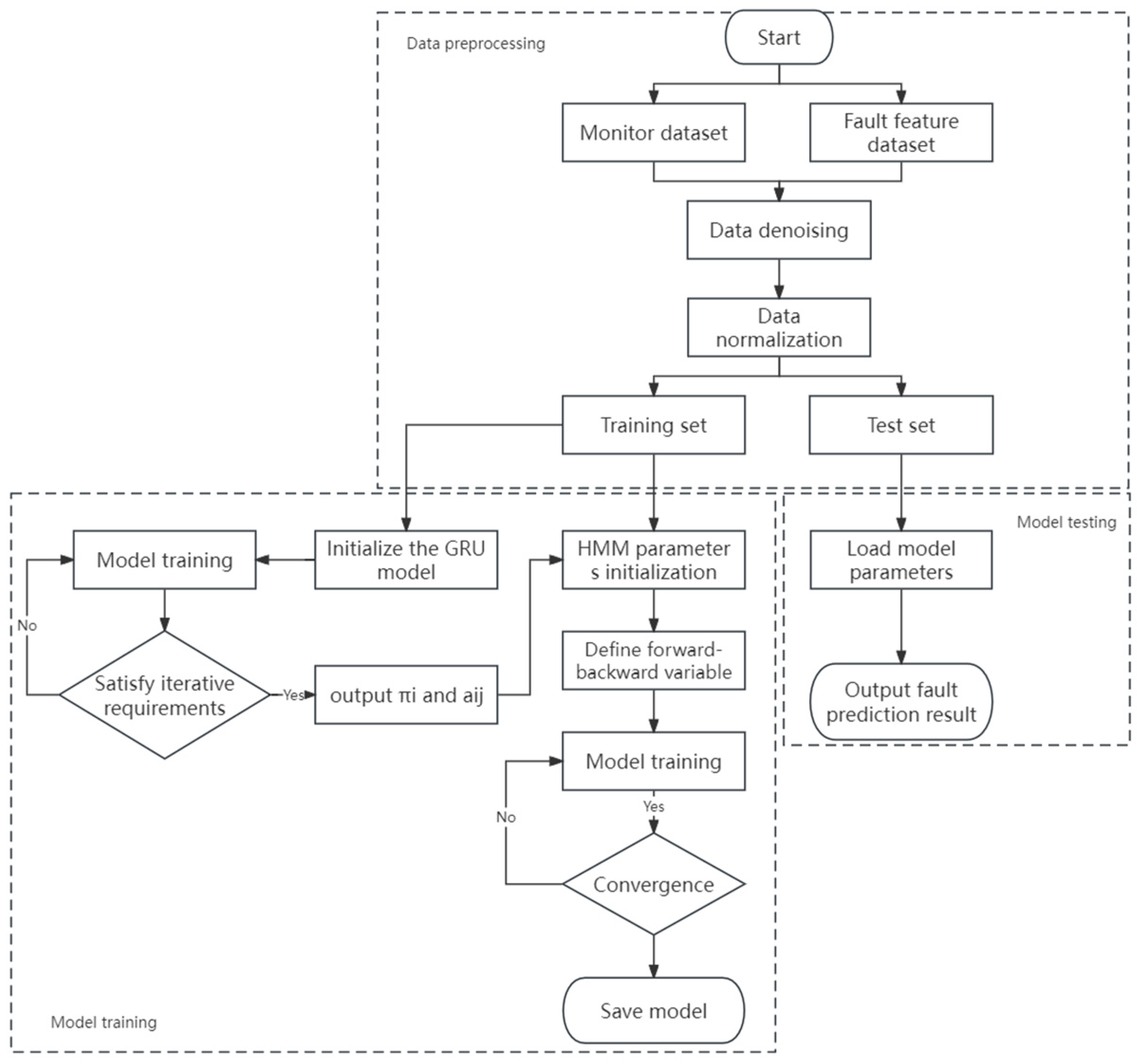
2.4. GRU-HMM Fault Prediction Model Algorithm Flow
3. Simulation Modeling of Dynamics for EMU Gearbox System
3.1. CRH5 Gearbox Rigid–Flexible Coupling Dynamic Modeling
3.1.1. Theory of Rigid–Flexible Coupled Dynamics
3.1.2. Working Environment and Model Setup
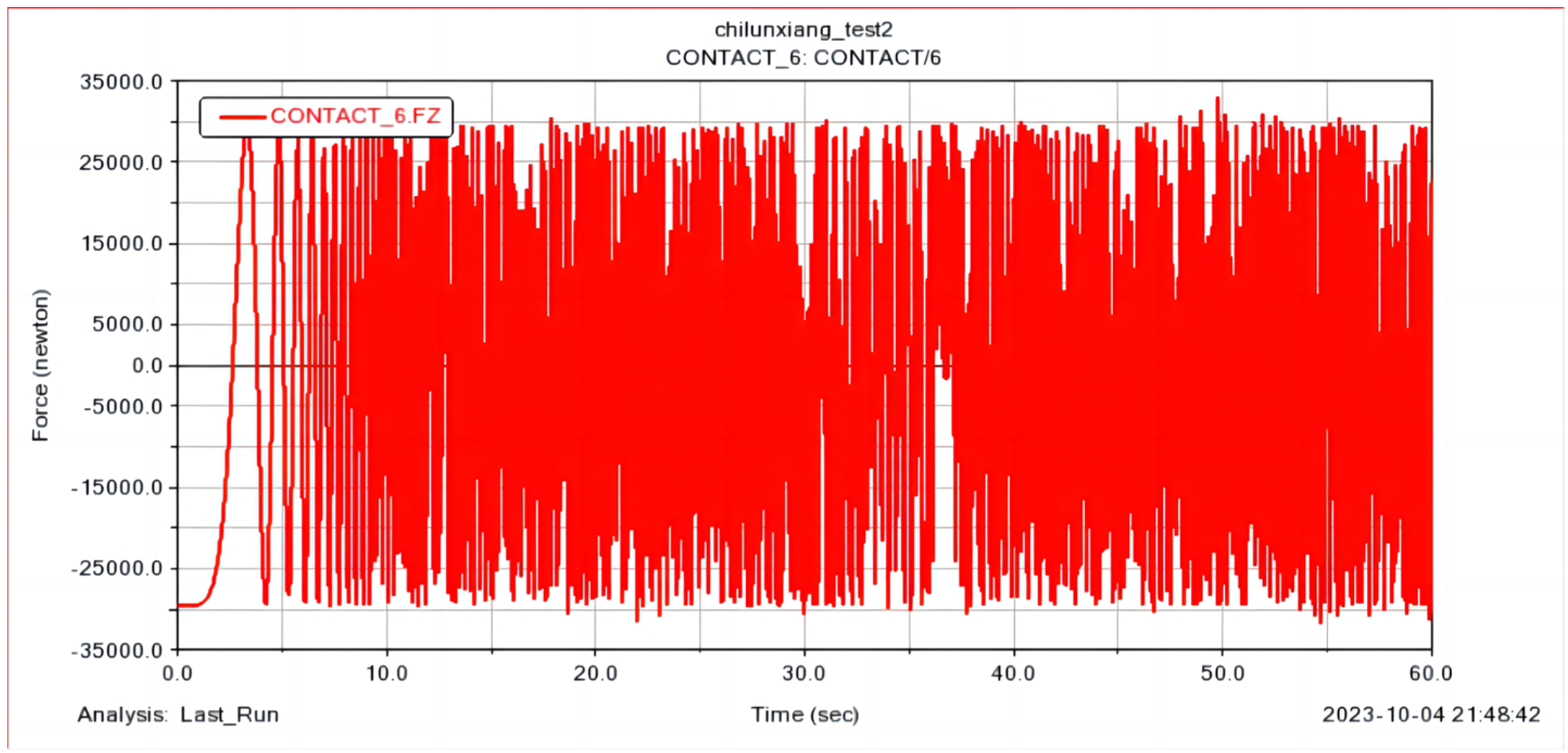
3.2. CRH5 Gearbox Rigid–Flexible Dynamics Model Contact Force Setting
3.2.1. CRH5 Gearbox Rigid–Flexible Coupling Dynamic Modeling
3.2.2. Contact Force Parameter Setting
- Modulus of elasticity E. Reflecting the stiffness of the material during elastic deformation, E = 2.07 × 1011.
- Poisson’s ratio μ. Reflecting the coefficient of transverse deformation of the material in one direction, μ = 0.3.
- Contact coefficient K. Related to the shape and material properties of the contact surface, it is calculated according to Hertz contact theory, K = 1.29 × 106.
- Contact index e. Reflecting the degree of nonlinearity of the material and calculated according to the Hertz contact theory, e = 1.5.
- Damping coefficient C. Reflecting the energy loss when objects collide, empirically, C = 10.
- Gear cutting depth d. Empirically, d = 0.1 mm.
- The coefficient of kinetic friction fdy = 0.05, the kinetic slip velocity vd = 10 mm/s, the coefficient of static friction fst = 0.08, and the static slip velocity vs = 1 mm/s.
- According to a related study [33], load-bearing loads and line excitation curves are incorporated at the axle.
3.3. Feasibility Testing
4. CRH5 Gearbox Degradation Feature Extraction and Analysis
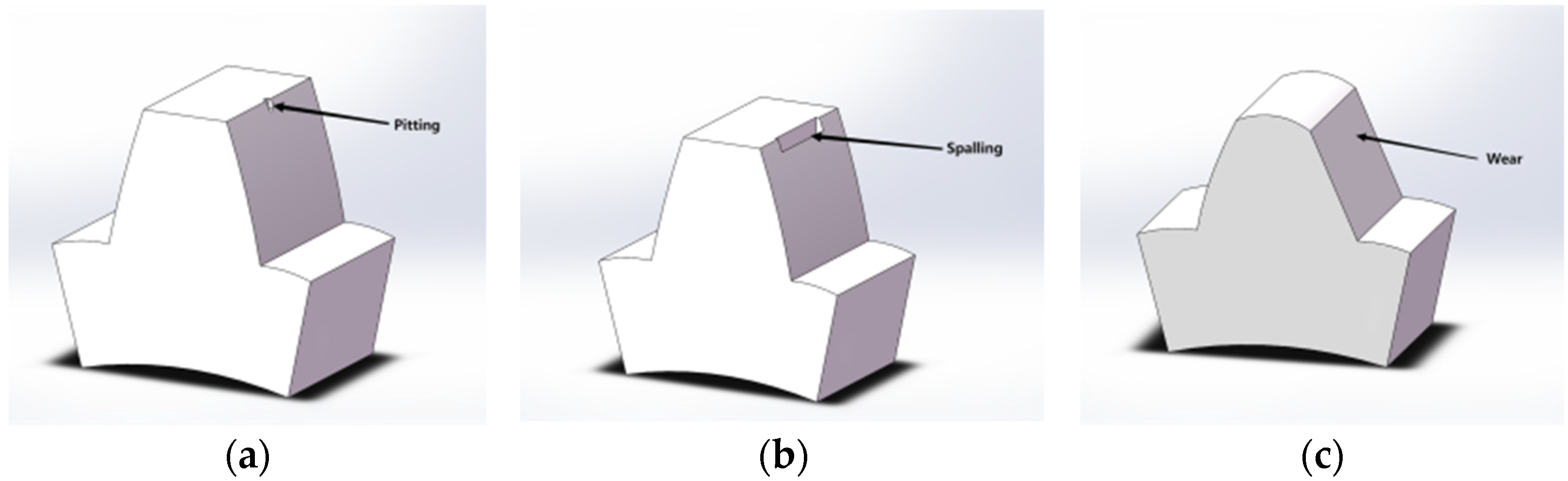
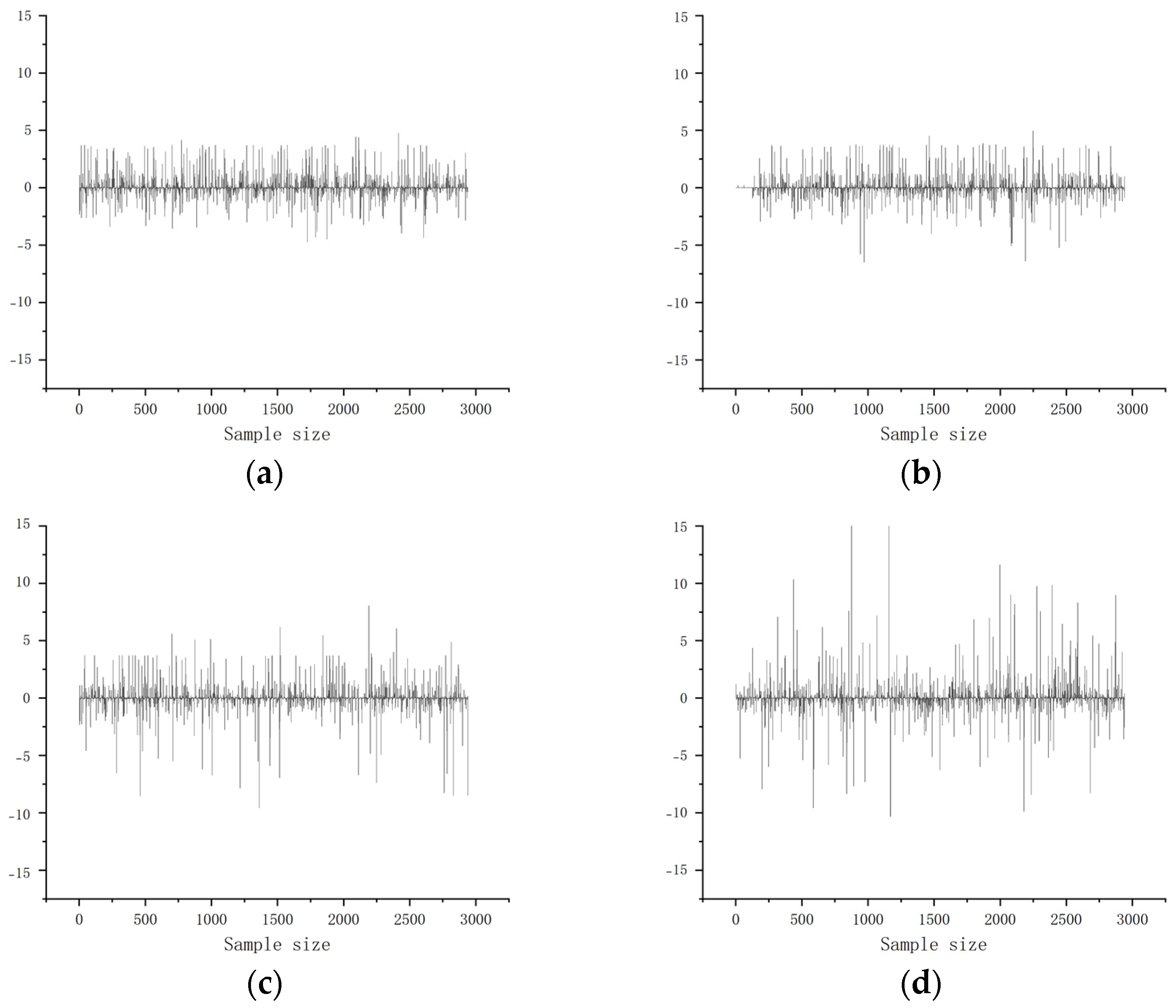
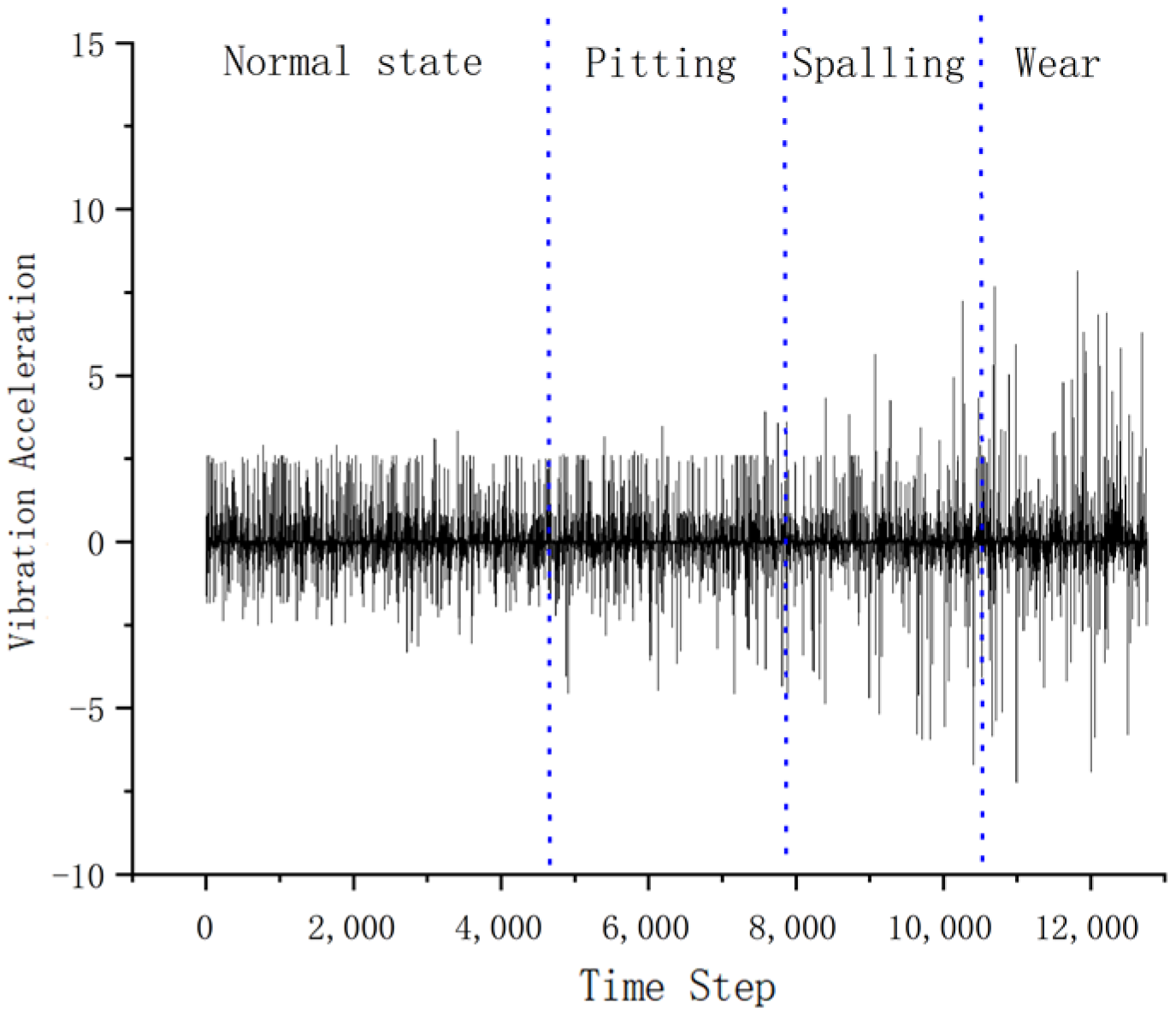
4.1. Transient Fault Simulation and Deep Learning of Critical Component Degradation Processes
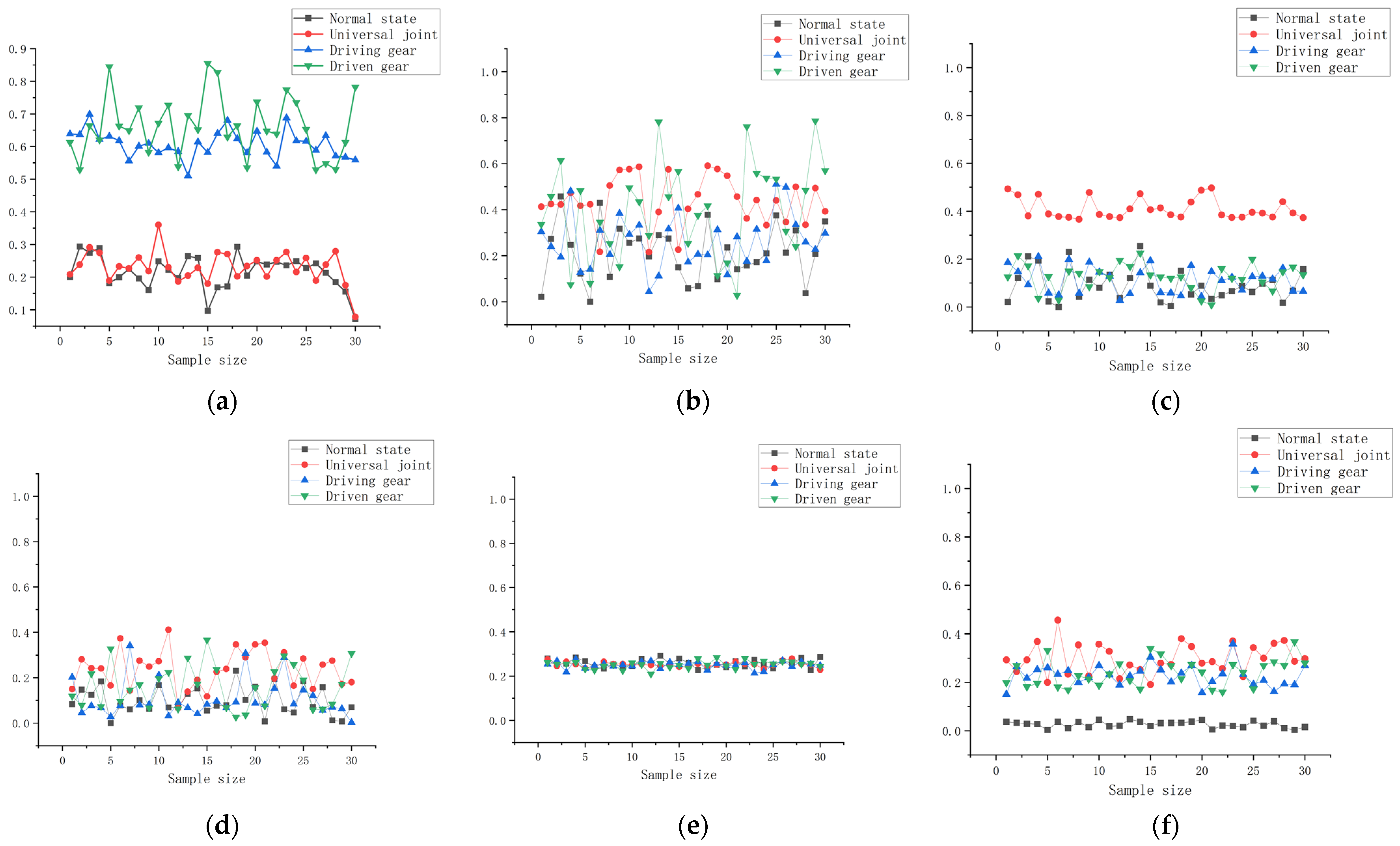
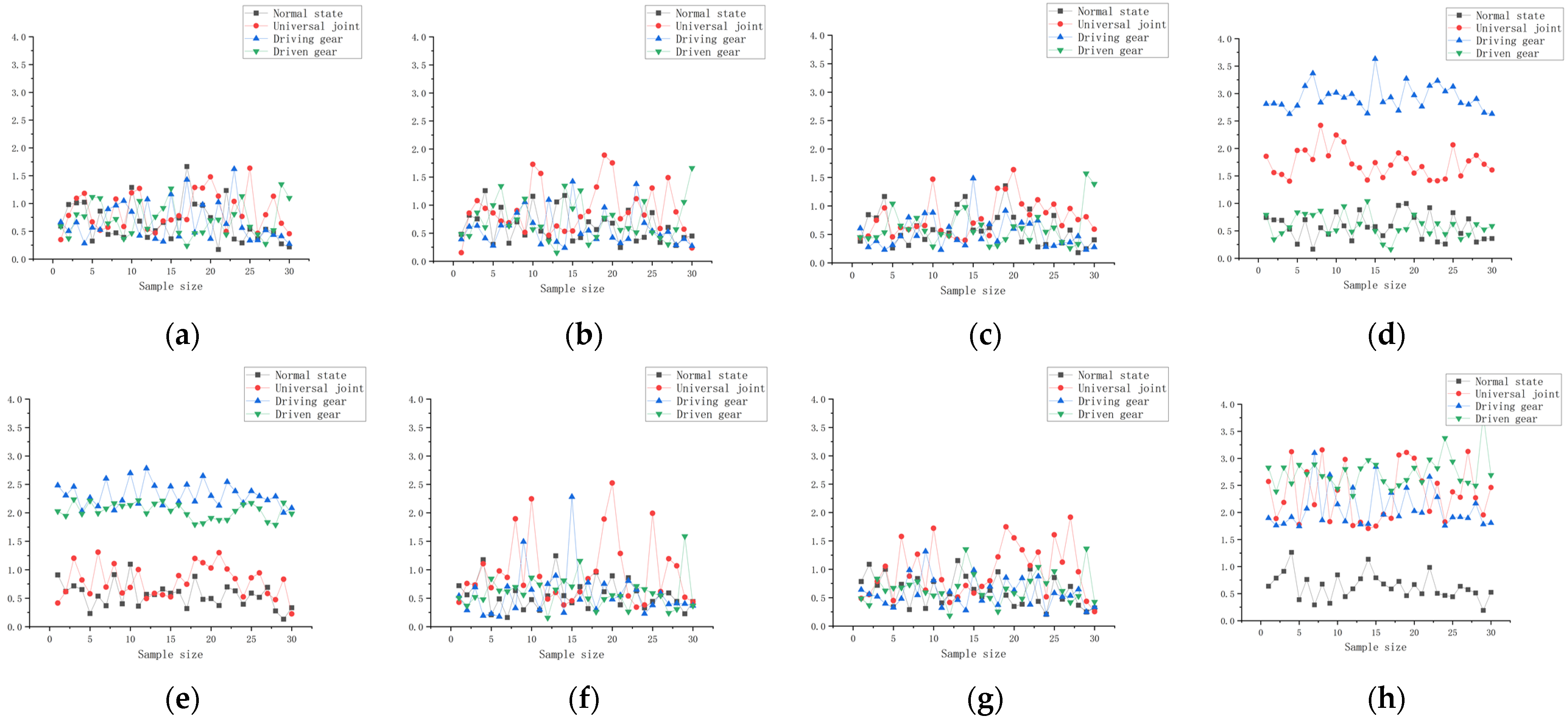
4.2. Constructing Hybrid Feature Domains
4.3. Hybrid Feature Domain Sensitivity Analysis
5. Instance Verification
5.1. Source of Experimental Data
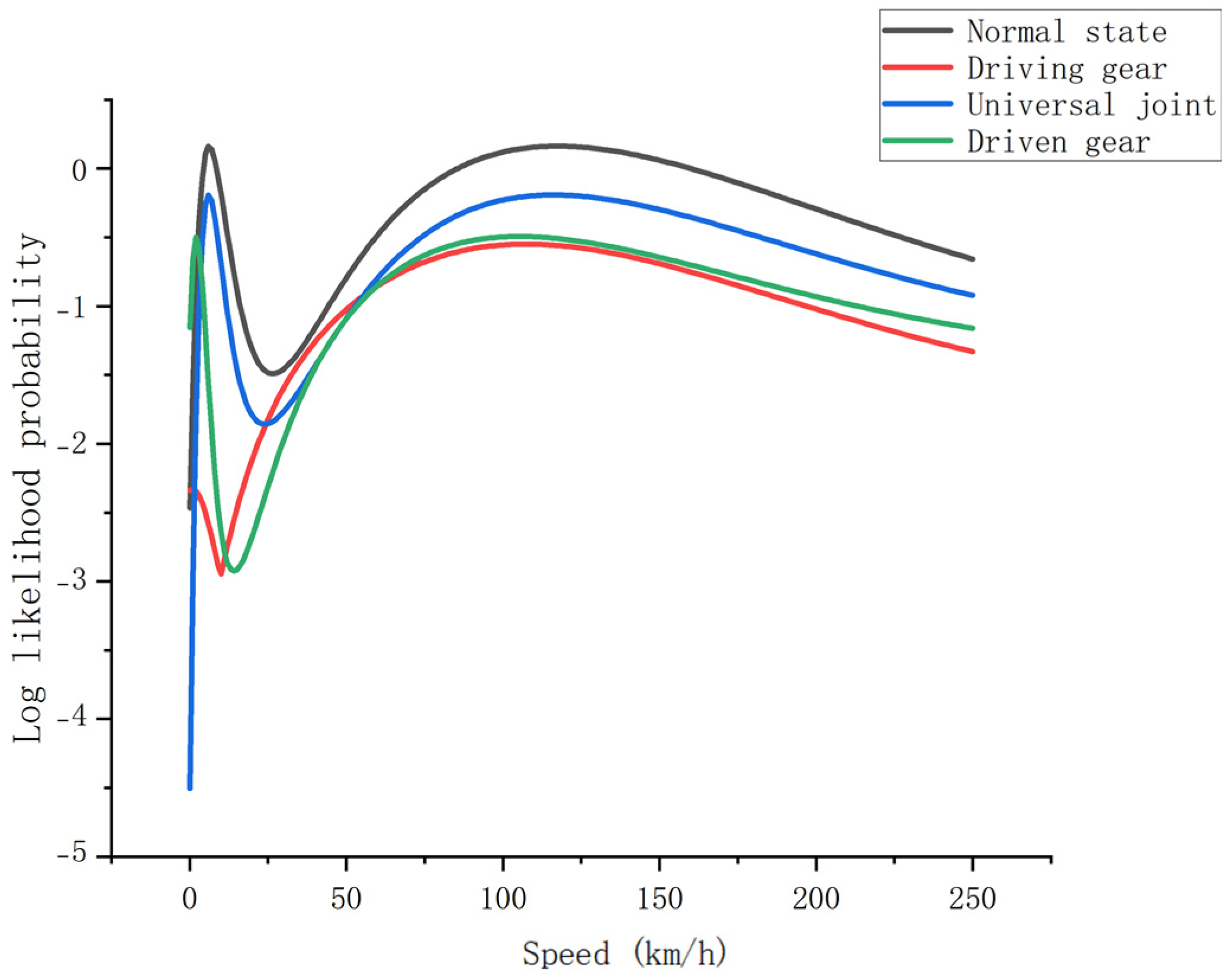
5.2. Verification of GRU-HMM Fault Prediction Model
5.3. Comparative Analysis
6. Conclusions
- A model for predicting faults in the CRH5 gearbox has been developed by establishing a dynamic coupling dynamics model and utilizing vibration acceleration data from key components throughout the gearbox’s degradation process. By creating a six-dimensional degradation hybrid feature domain, the issue of extracting fault features with limited CRH5 gearbox fault samples is addressed. The hybrid feature domains obtained through dynamics simulation also have some limitations. For example, the simulation data are not generalized enough to fully simulate the data fluctuations caused by wheel–rail excitation during EMU operation, and the performance of the model in the real environment cannot be fully evaluated. The accelerated life test of key gearbox components will be utilized to compensate for the above shortcomings in the subsequent study.
- The proposed GRU-HMM CRH5 gearbox fault prediction model combines the strengths of HMM in handling time-series data with GRU to overcome limitations on input sequence length, enhancing its ability to handle long-range dependency data. The effectiveness of the GRU-HMM fault prediction model was confirmed using operational monitoring data from a CRH5 prior to advanced repair and actual overhaul component records. Compared to traditional fault prediction models like HMM and SVM, the combined accuracy of the GRU-HMM model was found to be 15% higher.
- Although the GRU-HMM fault prediction model improves the recognition accuracy, it requires a large number of calculations in the preprocessing and training phases of the monitoring data, resulting in time-consuming fault prediction. In the subsequent study, the hyperparameters of the model will be adjusted to find the optimal combination of parameters to reduce the computation time. Cross-scale fault prediction studies of EMU gearboxes at a material scale and structural scale will also be considered, combining the multi-physical field coupling effect of temperature–vibration–load and performing comprehensive analysis to improve the accuracy of fault prediction.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Inturi, V.; Sabareesh, G.R.; Sharma, V. Integrated Vibro-Acoustic Analysis and Empirical Mode Decomposition for Fault Diagnosis of Gears in a Wind Turbine. Procedia Struct. Integr. 2019, 14, 937–944. [Google Scholar] [CrossRef]
- Yang, Y.; Li, X.; Pan, H.; Cheng, J. A composite fault feature extraction method for rotating machinery based on nonlinear mode decomposition. China Mech. Eng. 2018, 29, 7. [Google Scholar]
- Wang, Z.; Wang, J.; Zhang, J.; Zhao, Z.; Kou, Y. Based on improved MOMEDA for gearbox composite fault diagnosis. Vibration. Test. Diagn. 2018, 38, 6. [Google Scholar]
- Singh, P. Novel Fourier quadrature transforms and analytic signal representations for nonlinear and non-stationary time-series analysis. R. Soc. Open Sci. 2018, 5, 181131. [Google Scholar] [CrossRef] [PubMed]
- Rakesh, A.; Aravind, A.; Narendiranath, B.T.; Jahzan, M. Application of EMD ANN and DNN for Self-Aligning Bearing Fault Diagnosis. Arch. Acoust. J. Pol. Acad. Sci. 2018, 43, 163–175. [Google Scholar] [CrossRef] [PubMed]
- Kumar, P.S.L.A. Selecting effective intrinsic mode functions of empirical mode decomposition and variational mode decomposition using dynamic time warping algorithm for rolling element bearing fault diagnosis. Trans. Inst. Meas. Control 2019, 41, 1923–1932. [Google Scholar] [CrossRef]
- Michau, G.; Fink, O. Unsupervised Fault Detection in Varying Operating Conditions. In Proceedings of the 2019 IEEE International Conference on Prognostics and Health Management 2019 (PHM 2019—San Francisco), San Francisco, CA, USA, 17–20 June 2019. [Google Scholar]
- Fujita, Y.; Nagarajan, P.; Kataoka, T.; Ishikawa, T. ChainerRL: A Deep Reinforcement Learning Library; Cornell University Library: Ithaca, NY, USA, 2021. [Google Scholar]
- Li, X.; Xu, H.; Zhang, J.; Chang, H.H. Deep Reinforcement Learning for Adaptive Learning Systems. J. Educ. Behav. Stat. 2023, 48, 220–243. [Google Scholar] [CrossRef]
- Morales, E.F.; Murrieta-Cid, R.; Becerra, I.; Esquivel-Basaldua, M.A. A survey on deep learning and deep reinforcement learning in robotics with a tutorial on deep reinforcement learning. Intell. Serv. Robot. 2021, 14, 773–805. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, X.; Zhang, P.; Wu, F.; Li, X. Gearbox Composite Fault Diagnosis Method Based on Minimum Entropy Deconvolution and Improved Dual-Tree Complex Wavelet Transform. Entropy 2018, 21, 18. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.; Si, Z.; Xiang, J. A compound fault diagnosis method of rolling bearing based on wavelet scattering transform and improved soft threshold denoising algorithm. Measurement 2022, 196, 111276. [Google Scholar] [CrossRef]
- Tutivén, C.; Vidal, Y.; Insuasty, A.; Campoverde-Vilela, L.; Achicanoy, W. Early Fault Diagnosis Strategy for WT Main Bearings Based on SCADA Data and One-Class SVM. Energies 2022, 15, 4381. [Google Scholar] [CrossRef]
- Yao, D.; Yang, J.; Cheng, X.; Wang, X. Research on Bearing Fault Diagnosis Based on Multiscale Intrinsic Mode Permutation Entropy and SA-SVM. J. Mech. Eng. 2018, 9, 168–176. [Google Scholar] [CrossRef]
- Chen, J.; Jiang, J.; Guo, X.; Tan, L. An Efficient CNN with Tunable Input-Size for Bearing Fault Diagnosis. Int. J. Comput. Intell. Syst. 2021, 14, 625–634. [Google Scholar] [CrossRef]
- Rao, M.; Zuo, M.J. In A New Strategy for Rotating Machinery Fault Diagnosis under Varying Speed Conditions Based on Deep Neural Networks and Order Tracking. In Proceedings of the 2018 17th IEEE International Conference on Machine Learning and Applications (ICMLA), Orlando, FL, USA, 17–20 December 2018. [Google Scholar]
- An, Z.; Li, S.; Wang, J.; Xin, Y.; Xu, K. Generalization of deep neural network for bearing fault diagnosis under different working conditions using multiple kernel method. Neurocomputing 2019, 352, 42–53. [Google Scholar] [CrossRef]
- Li, X.; Li, J.; Qu, Y.; He, D. Semi-Supervised Gear Fault Diagnosis Using Raw Vibration Signal Based on Deep Learning. Chin. J. Aeronaut. 2019, 33, 418–426. [Google Scholar] [CrossRef]
- Peng, B.; Xia, H.; Lv, X.; Annor-Nyarko, M.; Zhang, J. An intelligent fault diagnosis method for rotating machinery based on data fusion and deep residual neural network. Appl. Intell. 2021, 52, 3051–3065. [Google Scholar] [CrossRef]
- He, Z.; Shao, H.; Zhang, X.; Cheng, J.; Yang, Y. Improved Deep Transfer Auto-Encoder for Fault Diagnosis of Gearbox under Variable Working Conditions with Small Training Samples. IEEE Access 2019, 7, 115368–115377. [Google Scholar] [CrossRef]
- Krummenacher, G.; Ong, C.S.; Koller, S.; Kobayashi, S.; Buhmann, J.M. Wheel Defect Detection with Machine Learning. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1176–1187. [Google Scholar] [CrossRef]
- Yang, B.; Lei, Y.; Jia, F.; Xing, S. An intelligent fault diagnosis approach based on transfer learning from laboratory bearings to locomotive bearings. Mech. Syst. Signal Process. 2019, 122, 692–706. [Google Scholar] [CrossRef]
- Wang, N.; Jiang, D. Vibration response characteristics of a dual-rotor with unbalance-misalignment coupling faults: Theoretical analysis and experimental study. Mech. Mach. Theory 2018, 125, 207–219. [Google Scholar] [CrossRef]
- Karlsson, H.; Qazizadeh, A.; Stichel, S.; Berg, M. Research on Status Monitoring of Suspension Components in Rail Vehicles Based on Machine Learning Methods. Smart Rail Transit 2022, 59, 72–76. [Google Scholar]
- Fu, Y.; Huang, D.; Qin, N.; Liang, K.; Yang, Y. High-Speed Railway Bogie Fault Diagnosis Using LSTM Neural Network. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018. [Google Scholar]
- Liang, K.; Qin, N.; Huang, D.; Fu, Y. Convolutional Recurrent Neural Network for Fault Diagnosis of High-Speed Train Bogie. Complexity 2018, 2018, 4501952. [Google Scholar] [CrossRef]
- Huang, D.; Fu, Y.; Qin, N.; Gao, S. Fault diagnosis of high-speed train bogie based on LSTM neural network. Chin. Sci. 2021, 64, 256–258. [Google Scholar] [CrossRef]
- Wang, H.; Men, T.; Li, Y. Transformer for High-Speed Train Wheel Wear Prediction with Multiplex Local-Global Temporal Fusion. IEEE Trans. Instrum. Meas. 2022, 71, 1–12. [Google Scholar] [CrossRef]
- Cheng, C.; Qiao, X.; Fu, C.; Wang, W.; Yin, X. Fault Prediction of High-Speed Train Running Gears Based on Hidden Markov Model and Analytic Hierarchy Process. In Proceedings of the 2019 CAA Symposium on Fault Detection, Supervision and Safety for Technical Processes (SAFEPROCESS), Xiamen, China, 5–7 July 2019. [Google Scholar]
- Schmidt, K.; Hoffmann, K.H. Modified Baum Welch Algorithm for Hidden Markov Models with Known Structure. In Proceedings of the International Conference on Intelligent Human Systems Integration, San Diego, CA, USA, 7–10 February 2019. [Google Scholar]
- Zhu, H. Research on Vibration Characteristics and Fatigue Failure of Gearbox Box of High Speed EMU. Ph.D. Thesis, Southwest Jiaotong University, Chengdu, China, 2019. [Google Scholar]
- Gao, G.; Zhang, J.; Guo, W.; Xia, Z. Research on Fault Characteristics of Gear Box Broken Teeth in High Speed Train Based on ADAMS. Def. Transp. Eng. Technol. 2020, 18, 5. [Google Scholar]
- Song, W. Research on Wheel Rail Load Characteristics and Track Excitation of Standard High-Speed Trains. Ph.D. Thesis, Beijing Jiaotong University, Beijing, China, 2020. [Google Scholar]
- Liao, P. A Calculation Model for Mesh Stiffness of Spiral Bevel Gears and Research on Vibration Characteristics of Transmission Systems. Ph.D. Thesis, Chongqing University, Chongqing, China, 2019. [Google Scholar]
- Lo, C.C.; Lee, C.H.; Huang, W.C. Prognosis of Bearing and Gear Wears Using Convolutional Neural Network with Hybrid Loss Function. Sensors 2020, 20, 3539. [Google Scholar] [CrossRef] [PubMed]
- Deutsch, J.; He, D. Using Deep Learning-Based Approach to Predict Remaining Useful Life of Rotating Components. IEEE Trans. Syst. Man Cybern. Syst. 2017, 48, 11–20. [Google Scholar] [CrossRef]
- Liu, H.K.; Ding, K.; He, G.L.; Li, W.H.; Lin, H.B. Research on the prediction method of gear remaining service life by combined failure mechanism and convolutional neural network. J. Mech. Eng. 2024. Available online: http://kns.cnki.net/kcms/detail/11.2187.th.20240322.1652.020.html (accessed on 27 April 2024).
- Shao, S.; Mcaleer, S.; Yan, R.; Baldi, P. Highly Accurate Machine Fault Diagnosis Using Deep Transfer Learning. IEEE Trans. Ind. Inform. 2019, 15, 2446–2455. [Google Scholar] [CrossRef]
- Zhang, L.; Huang, J.; Wu, R.Z.; Song, C.Y.; Wang, C.-B. A time-series reconstruction model for gear performance degradation assessment. Mech. Sci. Technol. 2022, 41, 1860–1868. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Designation | Expression (Math.) | Designation | Expression (Math.) |
|---|---|---|---|
| RMS | Pulse index | ||
| Margin index | Gravity frequency | ||
| Kurtosis index | RMS frequency |
| Model | Normal State | Universal Joint | Driving Gear | Driven Gear | Recognition Times (min) |
|---|---|---|---|---|---|
| GRU-HMM | 0.988 | 0.9 | 0.975 | 0.975 | 7.5 |
| HMM | 0.912 | 0.622 | 0.683 | 0.725 | 2.3 |
| SVM | 0.925 | 0.883 | 0.875 | 0.875 | 3.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Zhang, S.; Wang, Z.; Ma, F.; Sha, Z. Research on Fault Prediction Method for Electric Multiple Unit Gearbox Based on Gated Recurrent Unit–Hidden Markov Model. Appl. Sci. 2024, 14, 5320. https://doi.org/10.3390/app14125320
Liu C, Zhang S, Wang Z, Ma F, Sha Z. Research on Fault Prediction Method for Electric Multiple Unit Gearbox Based on Gated Recurrent Unit–Hidden Markov Model. Applied Sciences. 2024; 14(12):5320. https://doi.org/10.3390/app14125320
Chicago/Turabian StyleLiu, Cheng, Shengfang Zhang, Ziguang Wang, Fujian Ma, and Zhihua Sha. 2024. "Research on Fault Prediction Method for Electric Multiple Unit Gearbox Based on Gated Recurrent Unit–Hidden Markov Model" Applied Sciences 14, no. 12: 5320. https://doi.org/10.3390/app14125320