
Numerical Analysis of Tooth Contact and Wear Characteristics of Internal Cylindrical Gears with Curved Meshing Line
Abstract
:1. Introduction
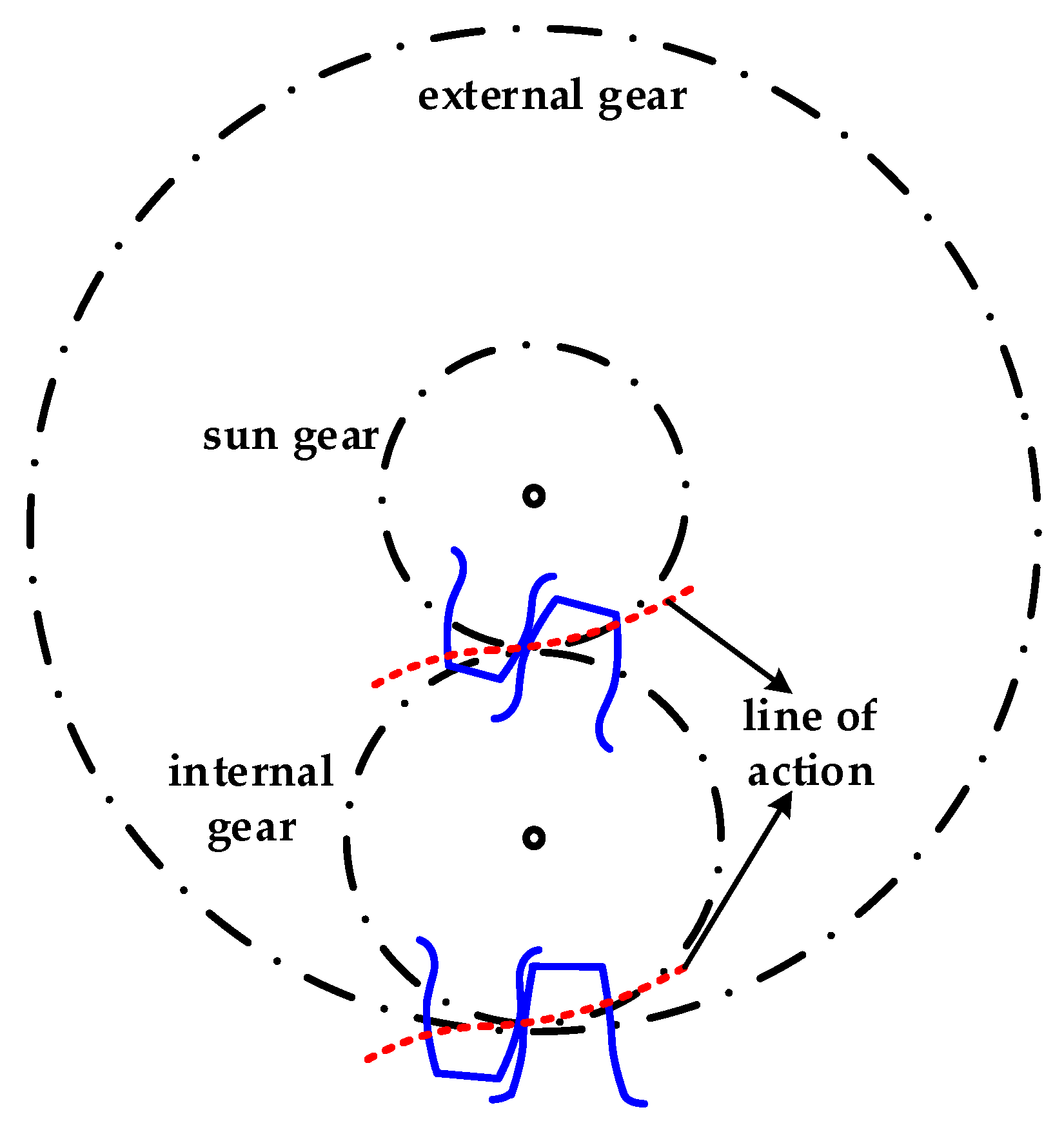
2. Designation of Tooth Profile of Internal Gears with Curved Meshing Lines
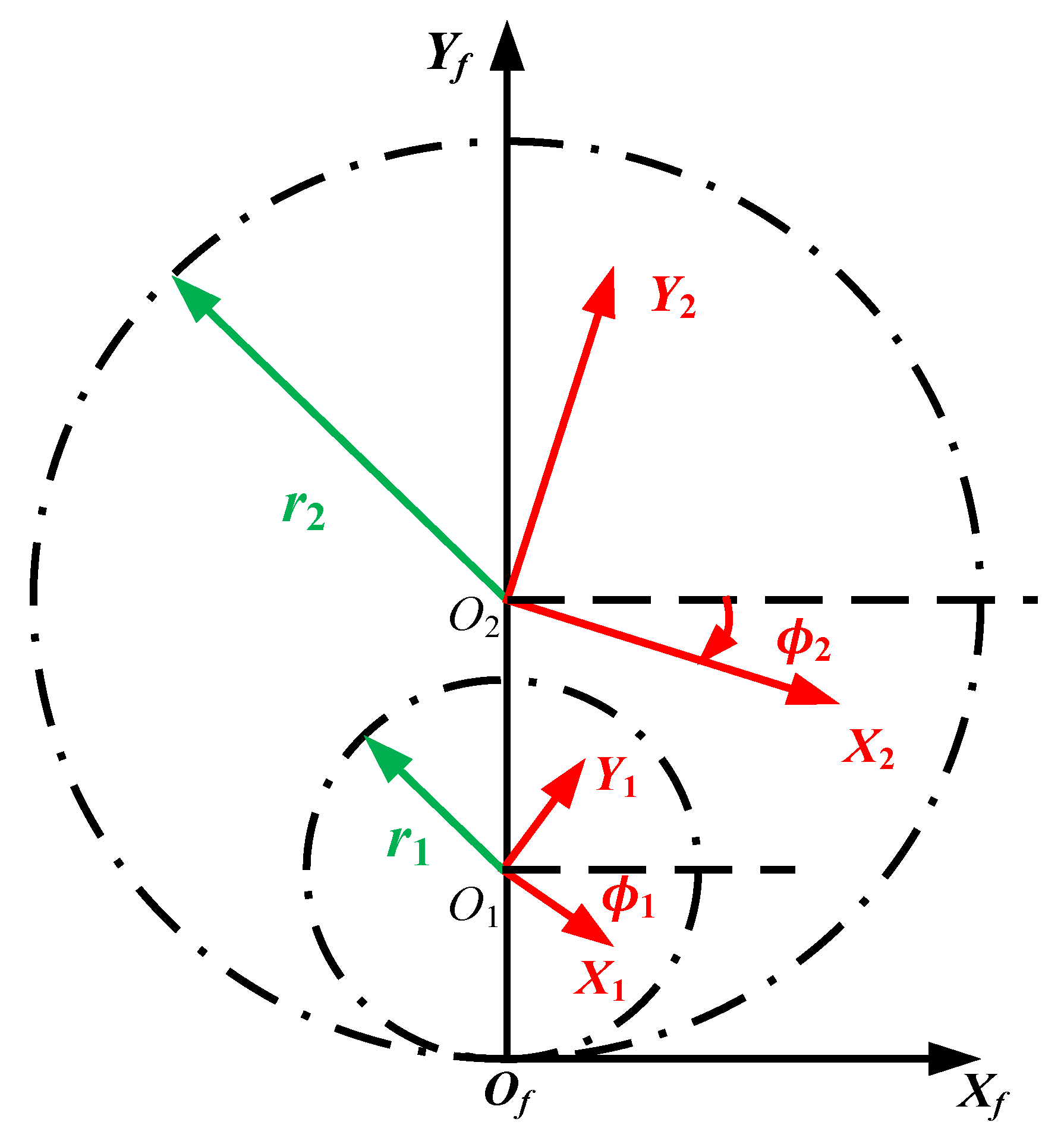
2.1. Designation of Curved Meshing Line
2.2. Derivation of Internal Gear Tooth Profiles
2.3. Tooth Profile Modification
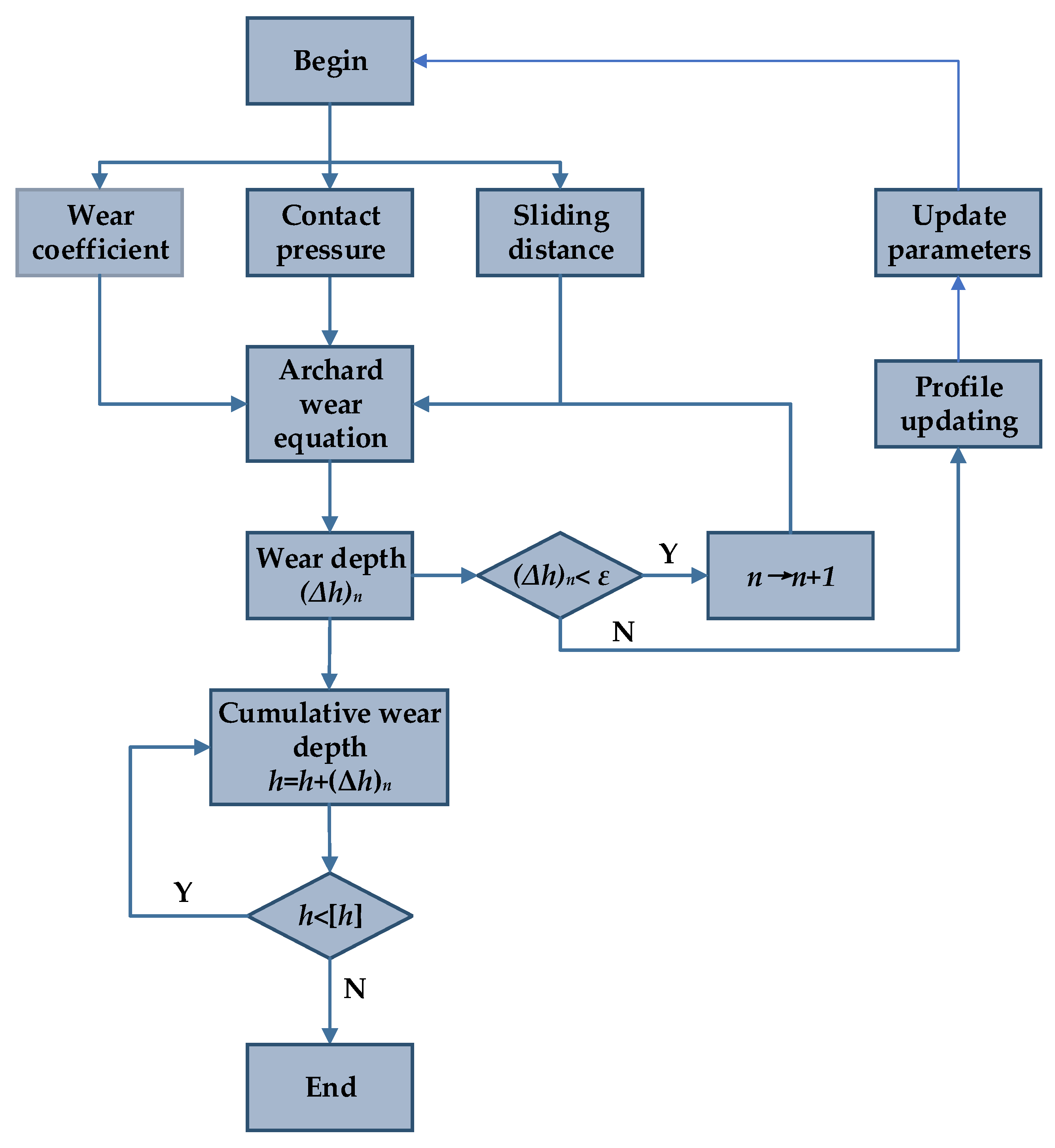
3. Numerical Simulation Model of Tooth Surface Wear
3.1. Wear Calculation Formula
3.2. Wear Coefficient
3.3. Contact Pressure
3.3.1. Establishment of High-Precision 3D Mesh Model
3.3.2. Material Properties and Finite Element Analysis Steps
- Step 1: Initial Contact Analysis
- Step 2: Initial load loading
- Step 3: Incremental loading analysis
3.3.3. Solver Selection and Meshing
3.3.4. Setting of Contact and Boundary Conditions
3.4. Sliding Distance
3.5. Calculation of Wear Depth
4. Results
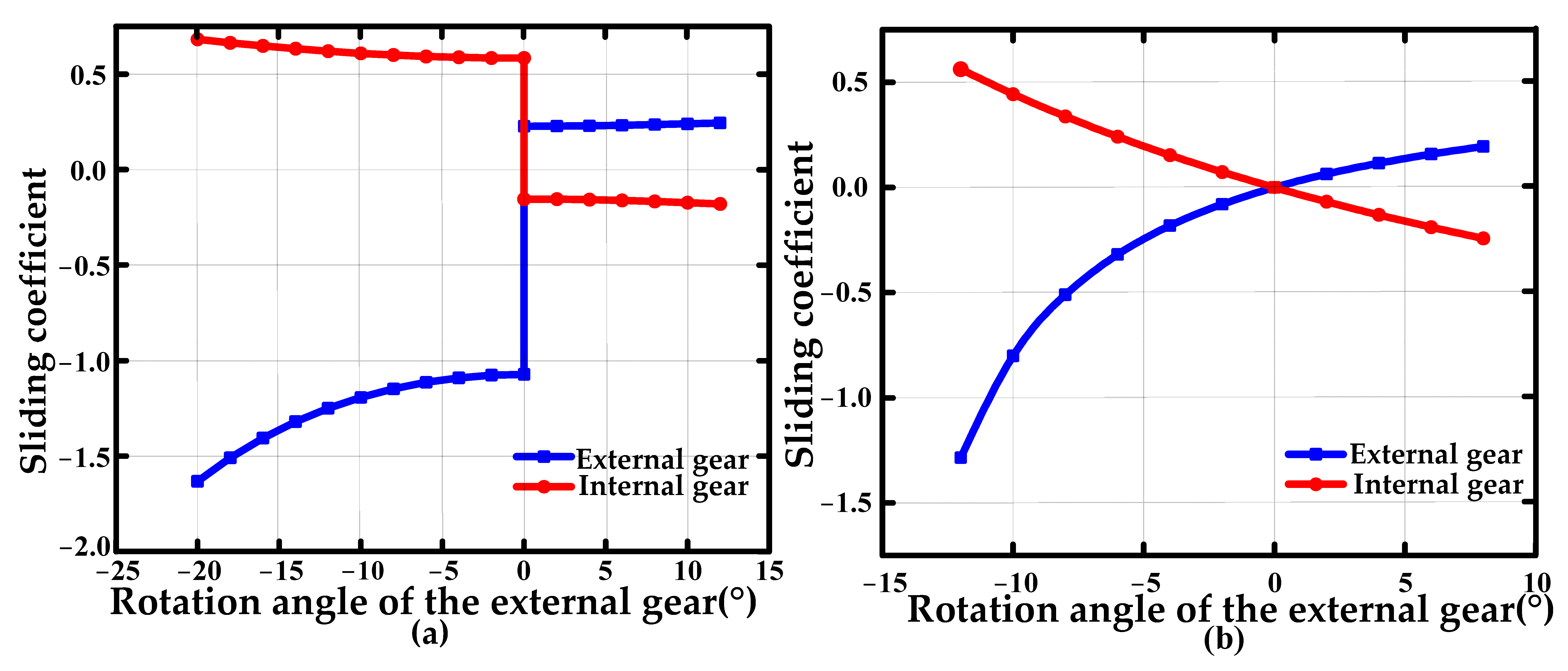
4.1. Comparison of Sliding Coefficients between Novel Gears and Involute Gears
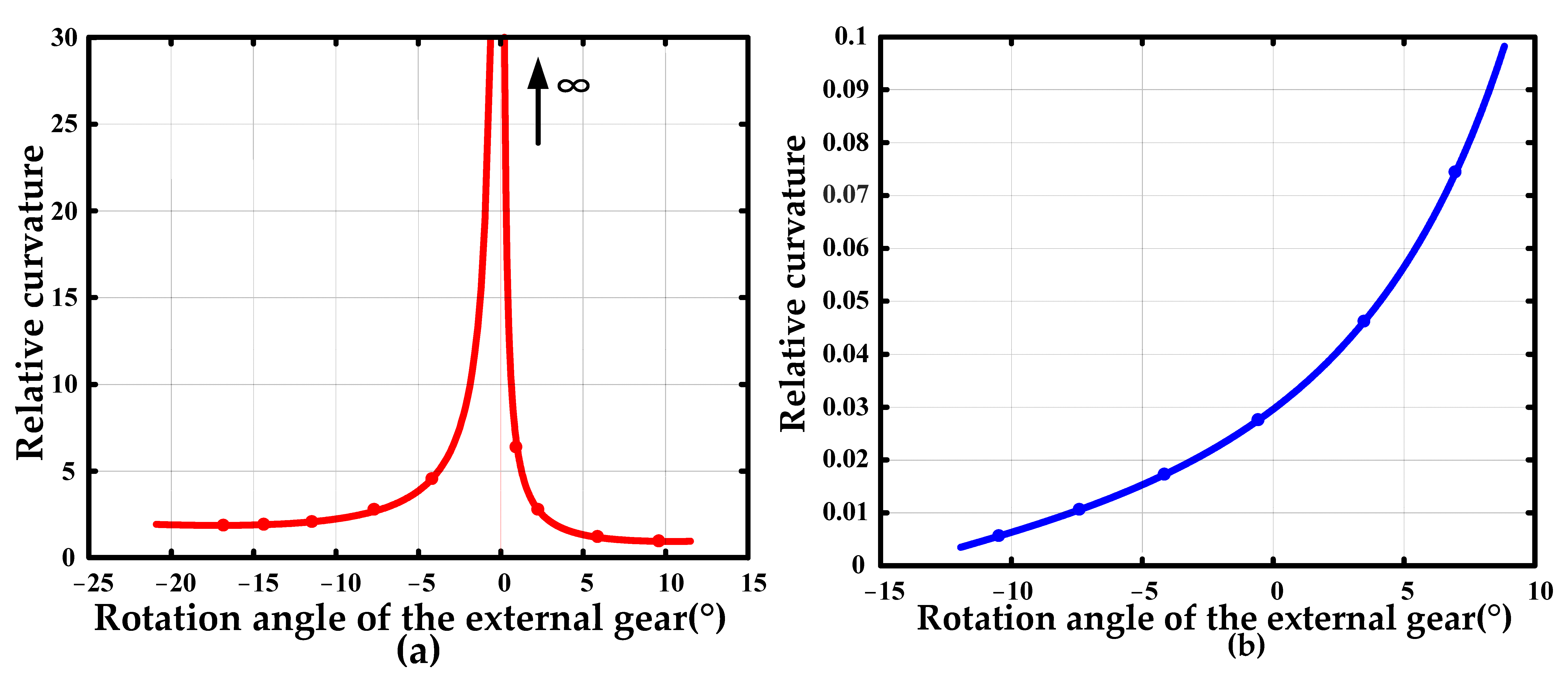
4.2. Comparison of Relative Curvature between Novel Gears and Involute Gears
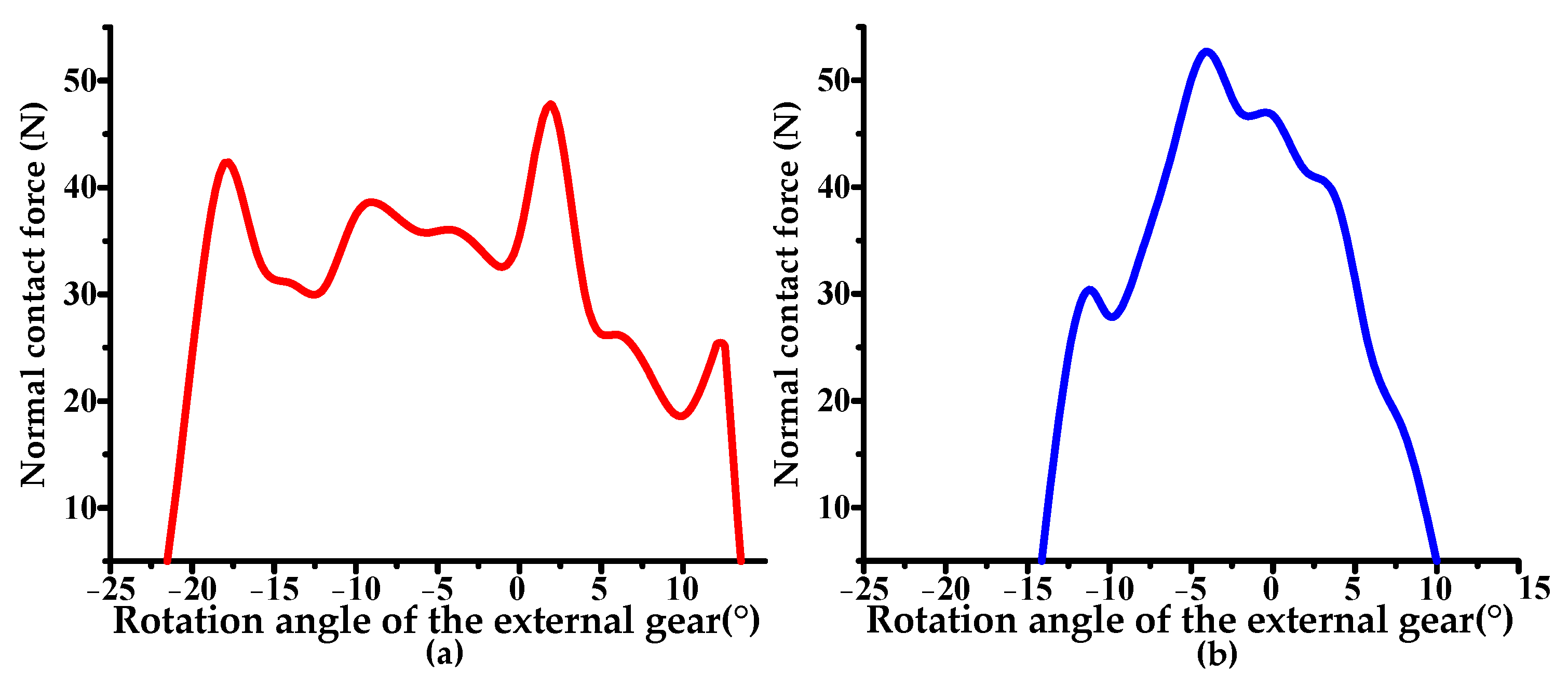
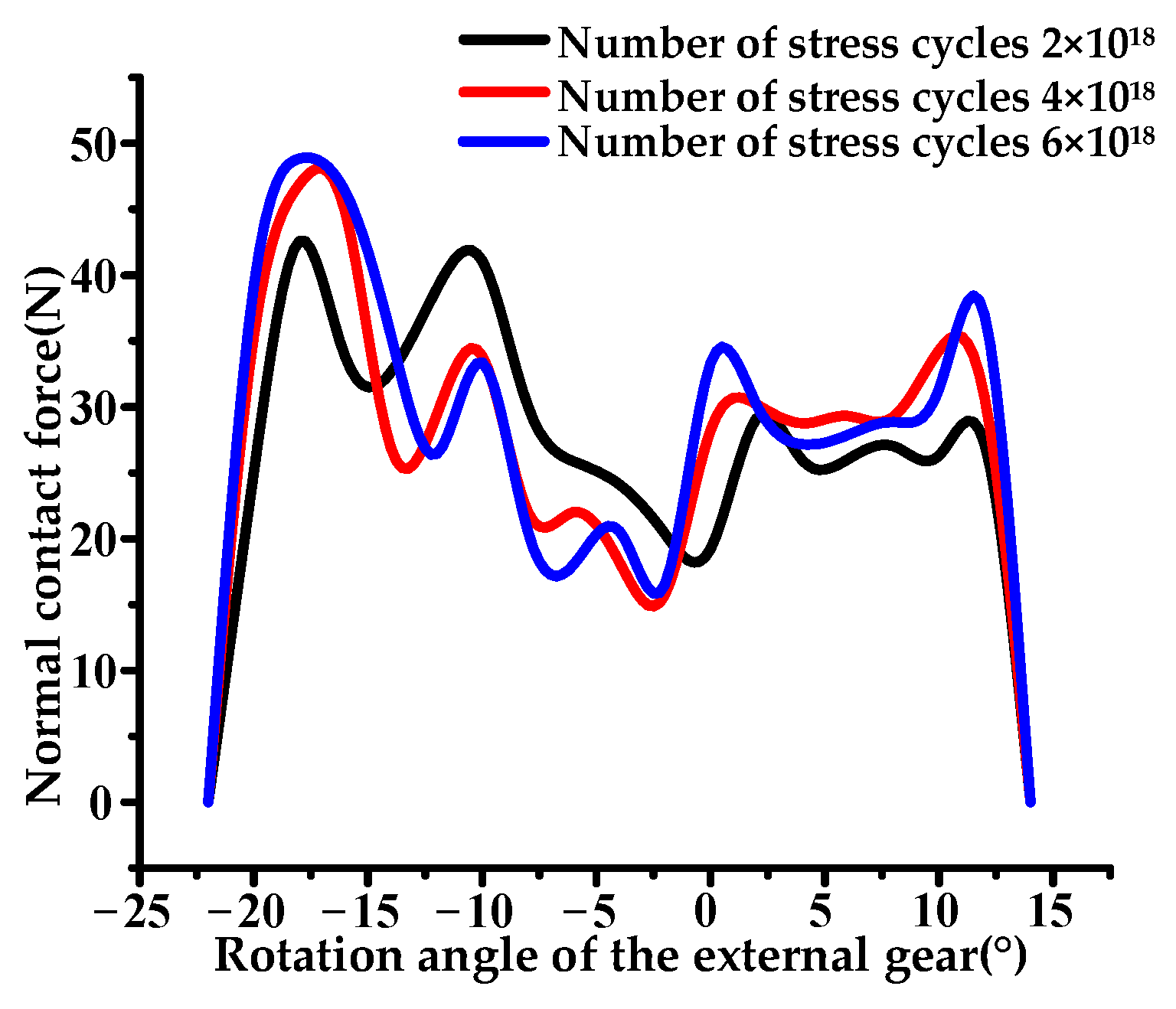
4.3. Comparison of Normal Contact Forces between Novel Gears and Involute Gears
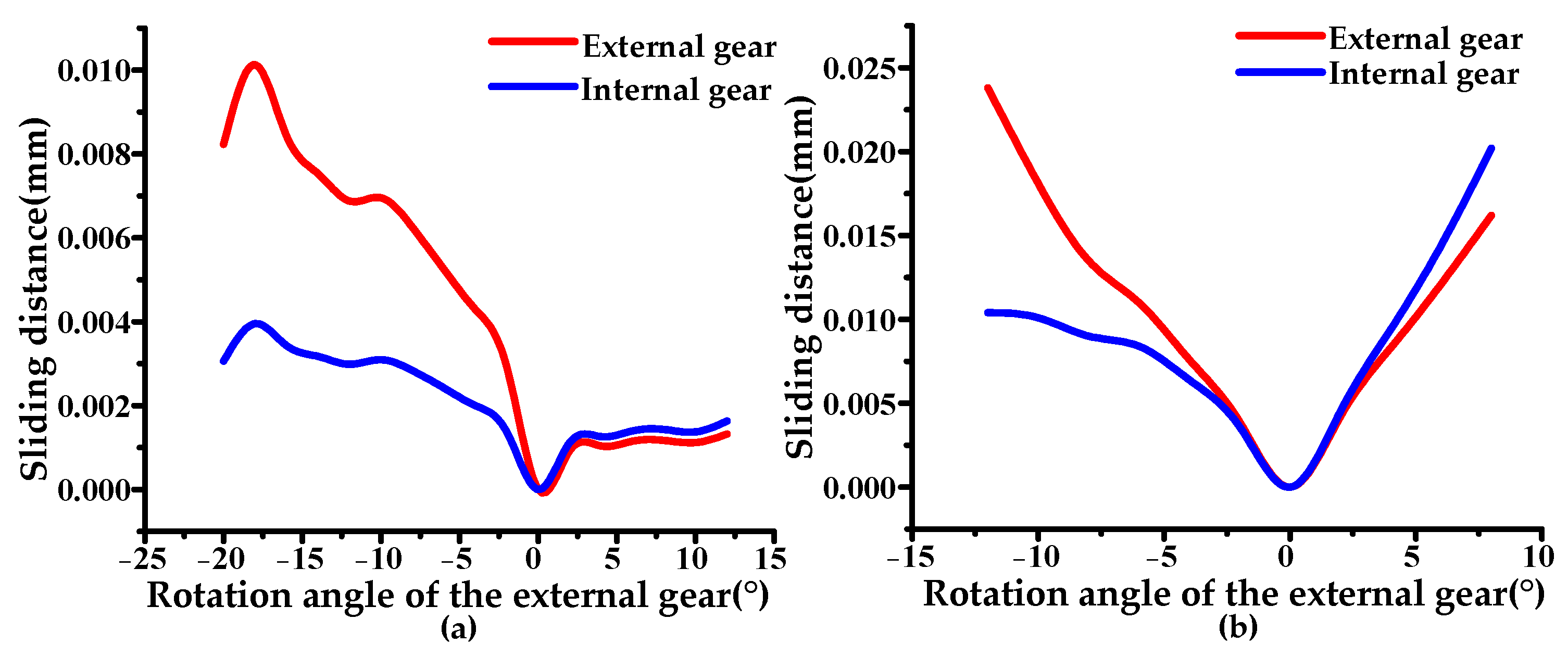
4.4. Comparison of Sliding Distance between Novel Gears and Involute Gears
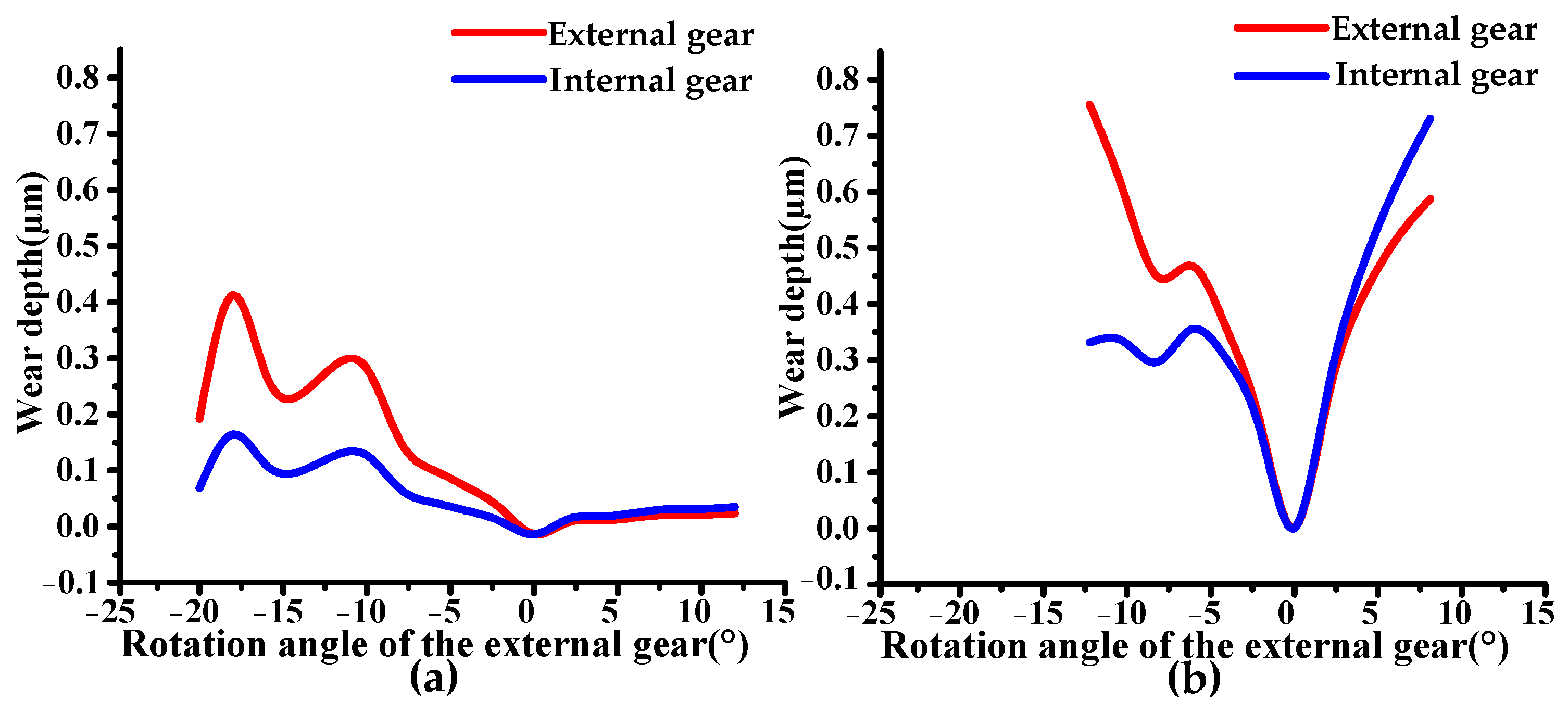
4.5. Comparison of Wear Depth between Novel Gears and Involute Gears
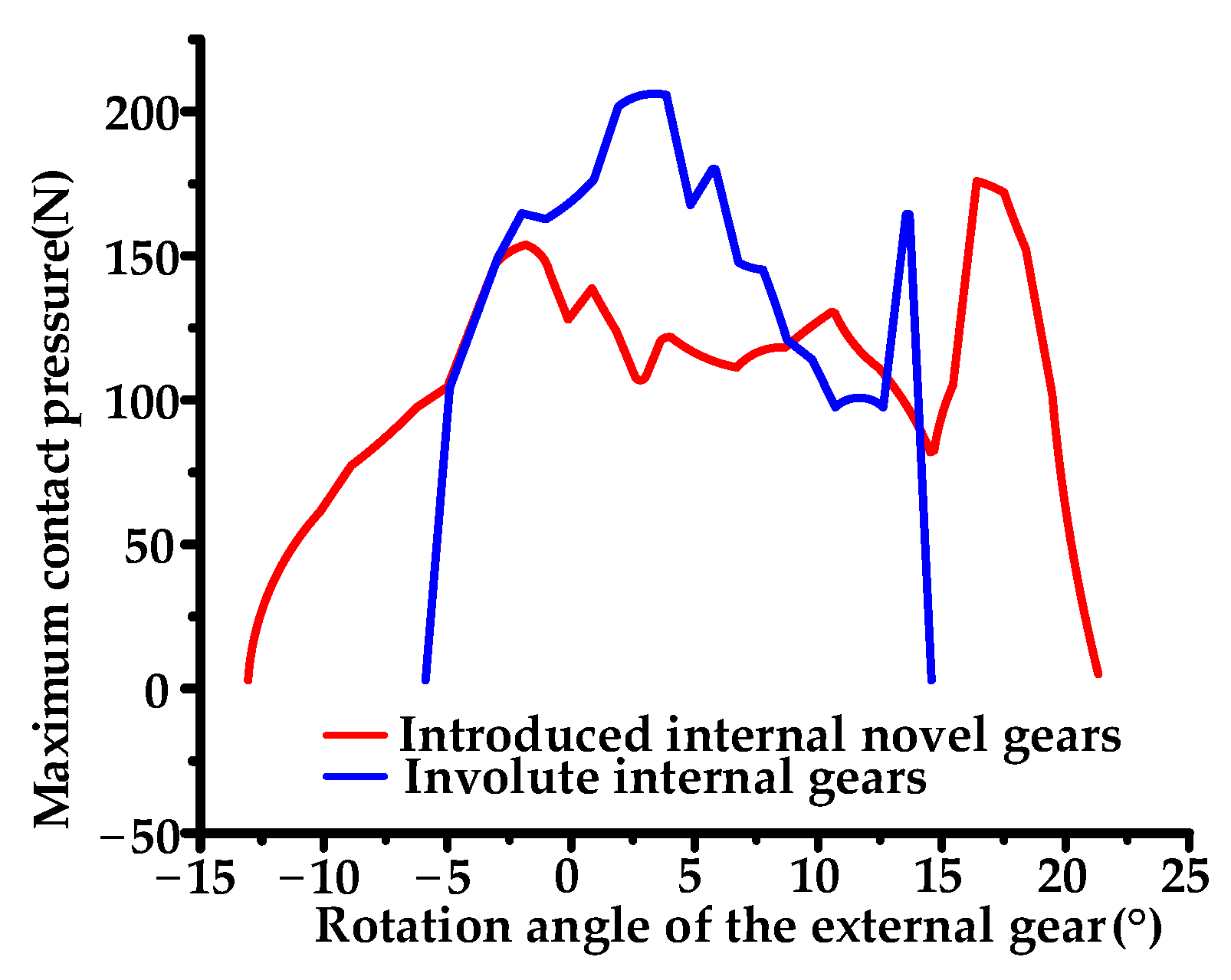
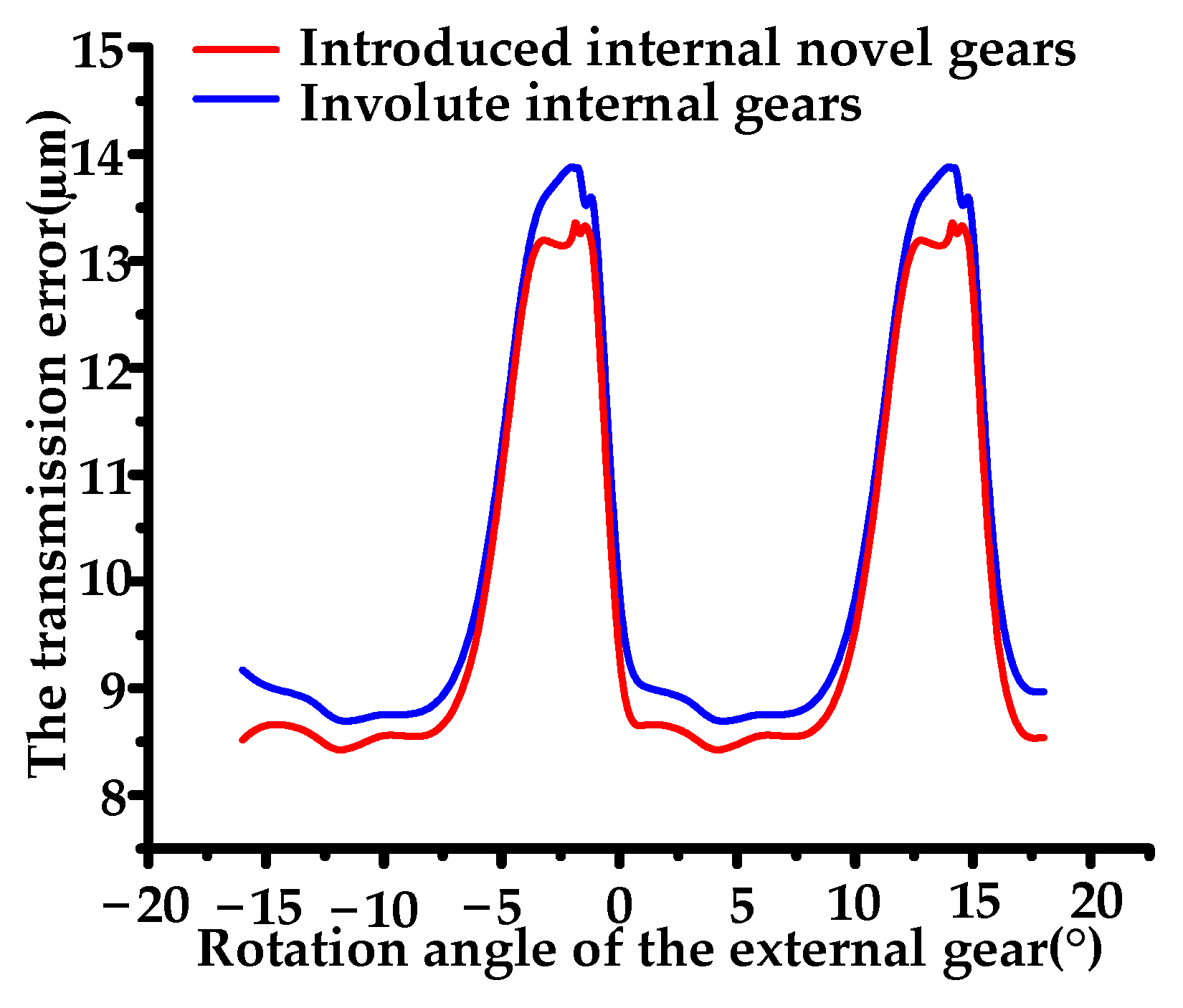
4.6. Comparison of the Maximum Contact Pressure and Transmission Error between Novel Gears and Involute Gears
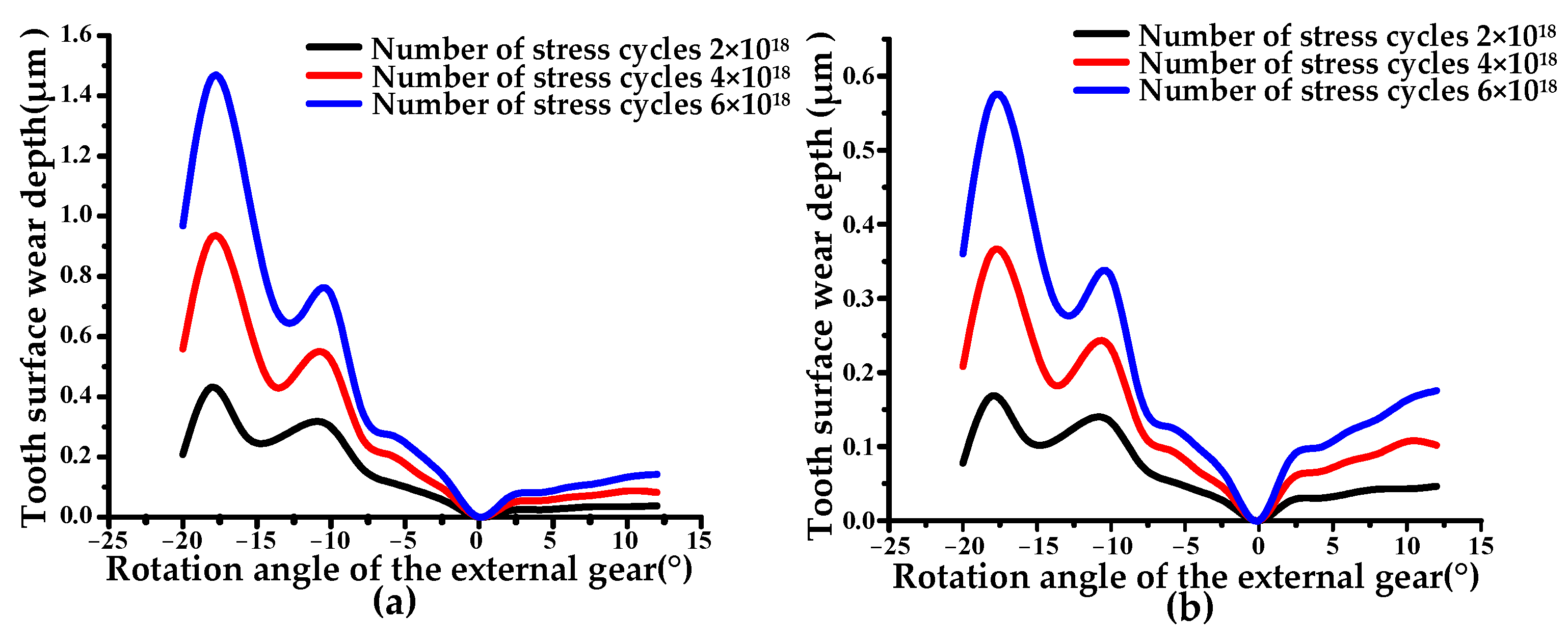
4.7. Effect of Stress Cycle Times on Wear Depth of Novel Gears
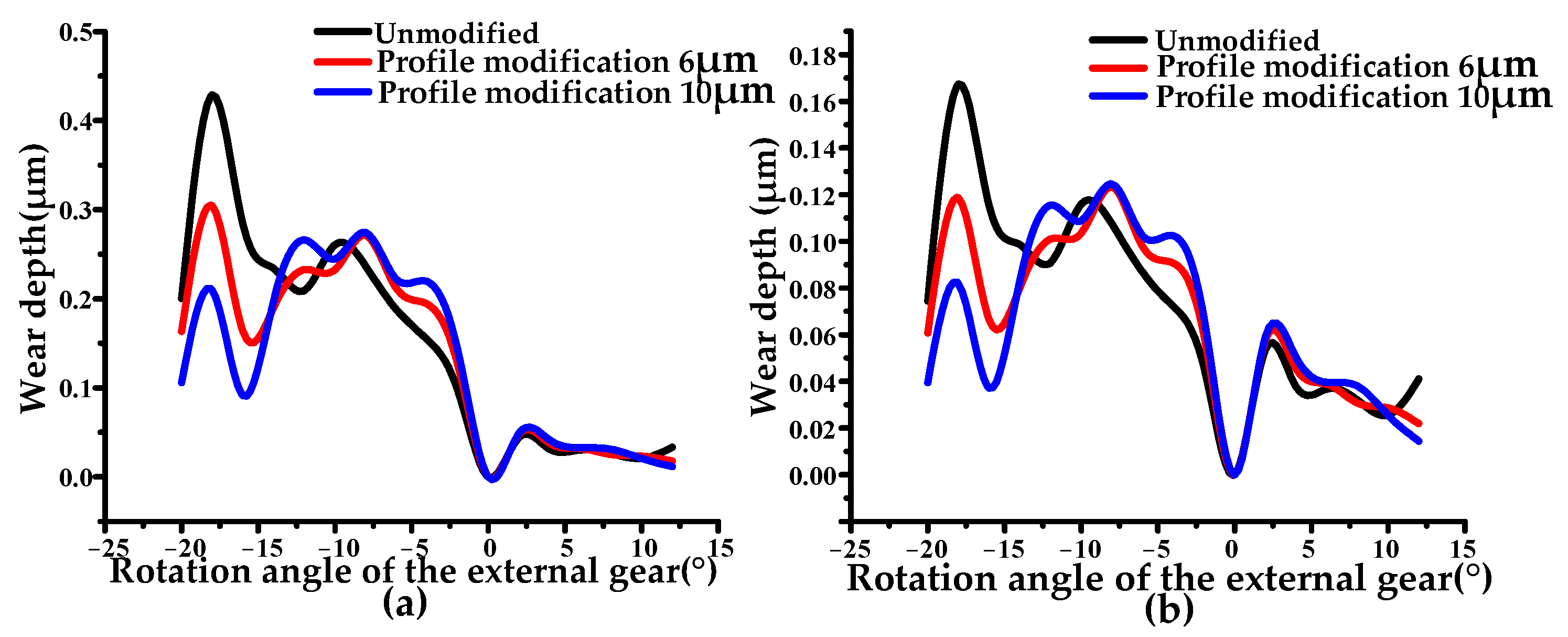
4.8. Effect of Tooth Profile Modification on Wear Depth of Novel Gears
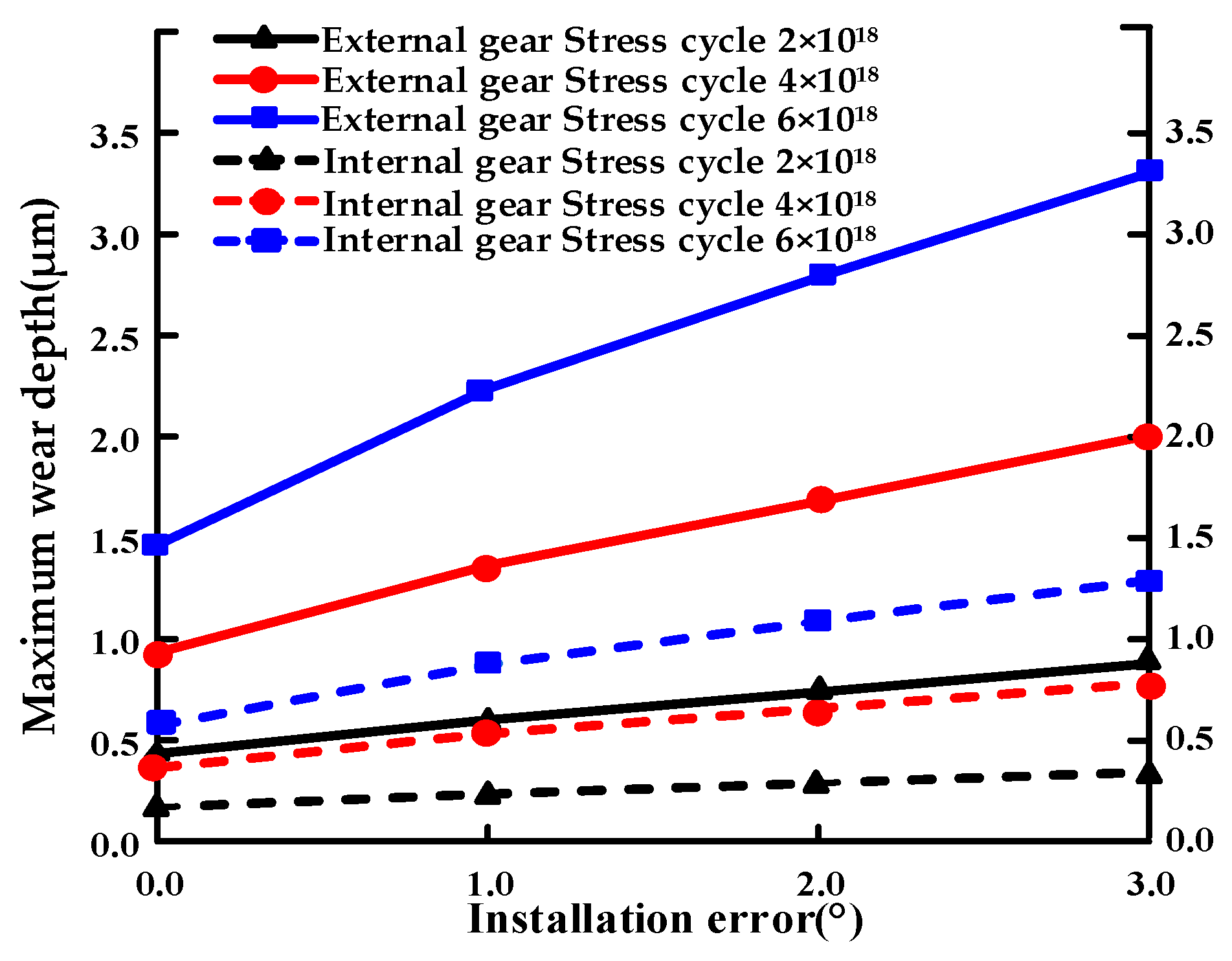
4.9. Effect of Installation Error on Wear Depth of Novel Gears
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
| Notation | |
| the meshing line parameter | |
| the external gear pitch radius | |
| r | the sun gear pitch radius |
| coordinate system (i = 1, 2, f) | |
| coordinate origin (i = 1, 2, f) | |
| tooth profile equation (i = 1, 2) | |
| rotation angle of pinion and gear (i = 1, 2) | |
| gear transmission ratio | |
| tooth number of pinion and gear (i = 1, 2) | |
| the sliding coefficient (i = 1, 2) | |
| the Hertz contact half-width | |
| the normal contact force on the tooth surface | |
| the tooth width | |
| the relative curvature of the internal meshing gear | |
| the first-order derivatives of the -axis (i = 1, 2) | |
| the first-order derivatives of the -axis (i = 1, 2) | |
| the second-order derivatives of the -axis (i = 1, 2) | |
| the second-order derivatives of the -axis (i = 1, 2) | |
References
- Jia, C.; Zhang, G. Investigation on the Dynamic Characteristics of Non-Orthogonal Helical Face Gears with Higher-Order Tooth Surface Modification. Mathematics 2024, 12, 366. [Google Scholar] [CrossRef]
- Rai, P.; Barman, A.G. An approach for design optimization of helical gear pair with balanced specific sliding and modified tooth profile. Struct. Multidiscip. Optim. 2019, 60, 331–341. [Google Scholar] [CrossRef]
- Chen, Z.; Ji, P. Research on the variation of mesh stiffness and transmission error for spur gear with tooth profile modification and wear fault. Eng. Fail. Anal. 2021, 122, 105184. [Google Scholar] [CrossRef]
- Sánchez, M.B.; Pleguezuelos, M.; Pedrero, J.I. Influence of profile modifications on meshing stiffness, load sharing, and trasnsmission error of involute spur gears. Mech. Mach. Theory 2019, 139, 506–525. [Google Scholar] [CrossRef]
- Pleguezuelos, M.; Pedrero, J.I.; Sánchez, M.B.; Vicente, E. Influence of wear on load sharing and transmission error of spur gears with profile modifications. In Proceedings of the International Conference on Machine and Industrial Design in Mechanical Engineering, Novi Sad, Serbia, 10–12 June 2021; Springer International Publishing: Cham, Switzerland, 2021; pp. 111–119. [Google Scholar]
- Tunalioglu, M.S.; Tuc, B. Effect of tooth profile modification on wear in internal gears. Proc. IOP Conf. Ser. Mater. Sci. Eng. 2018, 351, 012003. [Google Scholar] [CrossRef]
- Gołębski, R.; Ivandić, Ž. Analysis of modification of spur gear profile. Teh. Vjesn. 2018, 25, 643–648. [Google Scholar]
- Narazaki, J.; Ikejo, K.; Nagamura, K.; Tanaka, E.; Seyama, N. Effect of Tooth Profile Modification on Tooth Wear of Involute Spur Gear. In Proceedings of the JSME International Conference on Motion and Power Transmissions 2017, Kyoto, Japan, 28 February–3 March 2017; The Japan Society of Mechanical Engineers: Sapporo, Japan, 2017; p. 05-05. [Google Scholar]
- Abdul, W.A.M.; Krantz, T.L.; Shareef, I. Influence of tip modification on performance characteristics of involute spur gears. Aust. J. Mech. Eng. 2018, 18, 395–414. [Google Scholar] [CrossRef]
- Li, X.; Yang, H.; Niu, W.; Guo, R.; Sun, L. Investigation on tooth surface wear of cycloid drives considering tooth profile modifications. Lubricants 2023, 11, 323. [Google Scholar] [CrossRef]
- Zhang, X.; Fang, Z.; Yin, X.; Jia, H.; Ma, Y.; Xu, Y.; Zhao, H. Transform of parameter and teeth surface modification for non-standard planetary spur gear train with X-gears. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2023, 237, 279–289. [Google Scholar] [CrossRef]
- Issayeva, I.; Povetkin, V.; Alpeisov, A.; Bukayeva, A.; Arinova, D. An Increase of the Loading Capacity and Reliability of Gears by Methods of Optimizing Involute Gearing Parameters. East.-Eur. J. Enterp. Technol. 2020, 1, 103. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, X. Effects of misalignment on surface wear of spur gears. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2015, 229, 1145–1158. [Google Scholar] [CrossRef]
- Park, C.I. Influence of tooth profile and surface roughness on wear of spur gears considering temperature. J. Mech. Sci. Technol. 2023, 37, 5297–5306. [Google Scholar] [CrossRef]
- Chernets, M.V.; Shil’ko, S.V.; Starzhinsky, V.E. Estimation of Bearing Capacity and Wear Resistance of Spur Gear Meshing Taking into Account Tooth Profile Correction and Sliding Friction Coefficient. In New Approaches to Gear Design and Production 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 261–272. [Google Scholar]
- De, T.; Lizhuang, T.; Yue, H.; Bei, L. Dynamics of wind turbine gear wear fault based on tooth profile modification and friction coupling. Acta Energiae Solaris Sin. 2022, 43, 260. [Google Scholar]
- Chen, W.; Lei, Y.; Fu, Y.; Hou, L. A study of effects of tooth surface wear on time-varying mesh stiffness of external spur gear considering wear evolution process. Mech. Mach. Theory 2021, 155, 104055. [Google Scholar] [CrossRef]
- Zhang, S.; Sun, Z.; Guo, F. Investigation on wear and contact fatigue of involute modified gears under minimum quantity lubrication. Wear 2021, 484, 204043. [Google Scholar] [CrossRef]
- Feng, K.; Smith, W.A.; Randall, R.B.; Wu, H.; Peng, Z. Vibration-based monitoring and prediction of surface profile change and pitting density in a spur gear wear process. Mech. Syst. Signal Process. 2022, 165, 108319. [Google Scholar] [CrossRef]
- Zhang, Z.; Zheng, C.; Wen, M.; Yang, S.; Li, H.; Du, Q. A Wear Prediction Model for Spur Gears Based on the Dynamic Meshing Force and Tooth Profile Reconstruction. In Proceedings of the 2nd International Conference on Computer Engineering, Information Science & Application Technology (ICCIA 2017), Wuhan, China, 8–9 July 2017; Atlantis Press: Amsterdam, The Netherlands, 2016; pp. 851–860. [Google Scholar]
- Chernets, M.; Kiełbiński, J.; Chernets, J. A study on the impact of teeth meshing conditions and profile correction on the carrying capacity, wear, and life of a cylindrical gear. Tribologia 2016, 266, 25–43. [Google Scholar] [CrossRef]
- Sekar, R.P. Reduction of tooth wear on asymmetric spur gear through profile correction factors. Aust. J. Mech. Eng. 2022, 22, 506–522. [Google Scholar] [CrossRef]
- Sánchez, M.B.; Pleguezuelos, M.; Pedrero, J.I. Influence of profile modification on the transmission error of spur gears under surface wear. Mech. Mach. Theory 2024, 191, 105473. [Google Scholar] [CrossRef]
- Xiao, Z.; Shi, X.; Wang, X.; Ma, X.; Han, Y. Lubrication analysis and wear mechanism of heavily loaded herringbone gears with profile modifications in full film and mixed lubrication point contacts. Wear 2021, 477, 203790. [Google Scholar] [CrossRef]
- Huangfu, Y.; Zhao, Z.; Ma, H.; Han, H.; Chen, K. Effects of tooth modifications on the dynamic characteristics of thin-rimmed gears under surface wear. Mech. Mach. Theory 2020, 150, 103870. [Google Scholar] [CrossRef]
- Zheng, F.; Zhang, J.; Yao, L.; Tan, R. Investigation on the wear of spur gears generated by modified cutter. Friction 2021, 9, 288–300. [Google Scholar] [CrossRef]
- Mu, Y.; Li, W.; Fang, Z. Tooth surface modification method of face-milling spiral bevel gears with high contact ratio based on cutter blade profile correction. Int. J. Adv. Manuf. Technol. 2020, 106, 3229–3237. [Google Scholar] [CrossRef]
- Karpuschewski, B.; Beutner, M.; Köchig, M.; Härtling, C. Influence of the tool profile on the wear behaviour in gear hobbing. CIRP J. Manuf. Sci. Technol. 2017, 18, 128–134. [Google Scholar] [CrossRef]
- Jia, C.; He, Q.; Xiao, J.; Dong, H. Design and Analysis of Novel Non-Involute Cylindrical Gears with a Curved Path of Contact. Mathematics 2022, 10, 4290. [Google Scholar] [CrossRef]
- Shen, Z.; Qiao, B.; Yang, L.; Luo, W.; Yang, Z.; Chen, X. Fault mechanism and dynamic modeling of planetary gear with gear wear. Mech. Mach. Theory 2021, 155, 104098. [Google Scholar] [CrossRef]
- Sun, Y.; Li, Y.; Zhang, Q.; Qin, X.; Chen, K. Wear analysis and simulation of small module gear based on Archard model. Eng. Fail. Anal. 2023, 144, 106990. [Google Scholar] [CrossRef]
- Guan, Y.; Chen, J.; Fang, Z.; Hu, S. A quick multi-step discretization and parallelization wear simulation model for crown gear coupling with misalignment angle. Mech. Mach. Theory 2022, 168, 104576. [Google Scholar] [CrossRef]
- Kahraman, A.; Li, S.; Janakiraman, V. An Investigation of the Impacts of Contact Parameters on Wear Coefficient. J. Tribol. 2014, 136, 031602-1–031602-7. [Google Scholar]
- Andersson, S. Initial wear of gears. Tribol. Int. 1977, 10, 206–210. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameter | Novel Gears | Involute Gears |
|---|---|---|
| Tooth number | 29/79 | 29/79 |
| Normal module (mm) | 2.25 | 2.25 |
| Helix angle (degree) | 0 | 0 |
| Face width (mm) | 25 | 25 |
| Addendum coefficient | 1 | 1 |
| Dedendum coefficient | 1.25 | 1.25 |
| Root radius (mm) | 0.1 | 0.1 |
| Contact ratio | 2.82 | 1.69 |
| k1 | 0.32 | / |
| k2 | 0.32 | / |
| Torque (N·m) | 134 | 134 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, C.; Zhang, G.; Li, G. Numerical Analysis of Tooth Contact and Wear Characteristics of Internal Cylindrical Gears with Curved Meshing Line. Appl. Sci. 2024, 14, 5399. https://doi.org/10.3390/app14135399
Jia C, Zhang G, Li G. Numerical Analysis of Tooth Contact and Wear Characteristics of Internal Cylindrical Gears with Curved Meshing Line. Applied Sciences. 2024; 14(13):5399. https://doi.org/10.3390/app14135399
Chicago/Turabian StyleJia, Chao, Ge Zhang, and Guoju Li. 2024. "Numerical Analysis of Tooth Contact and Wear Characteristics of Internal Cylindrical Gears with Curved Meshing Line" Applied Sciences 14, no. 13: 5399. https://doi.org/10.3390/app14135399