
Experimental Investigation of a Point Absorber Wave Energy Converter Using an Inertia Adjusting Mechanism

Abstract
:1. Introduction
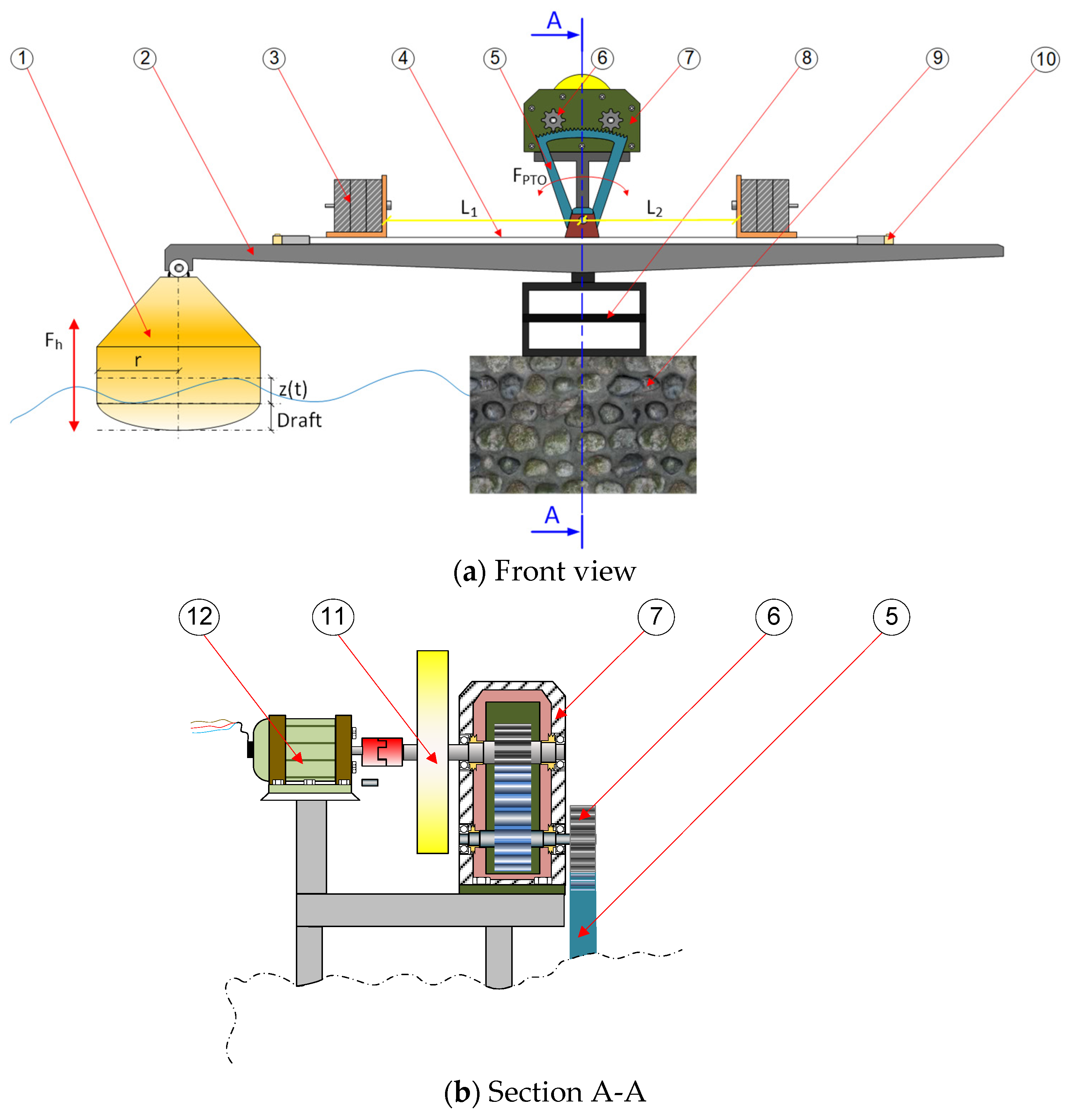
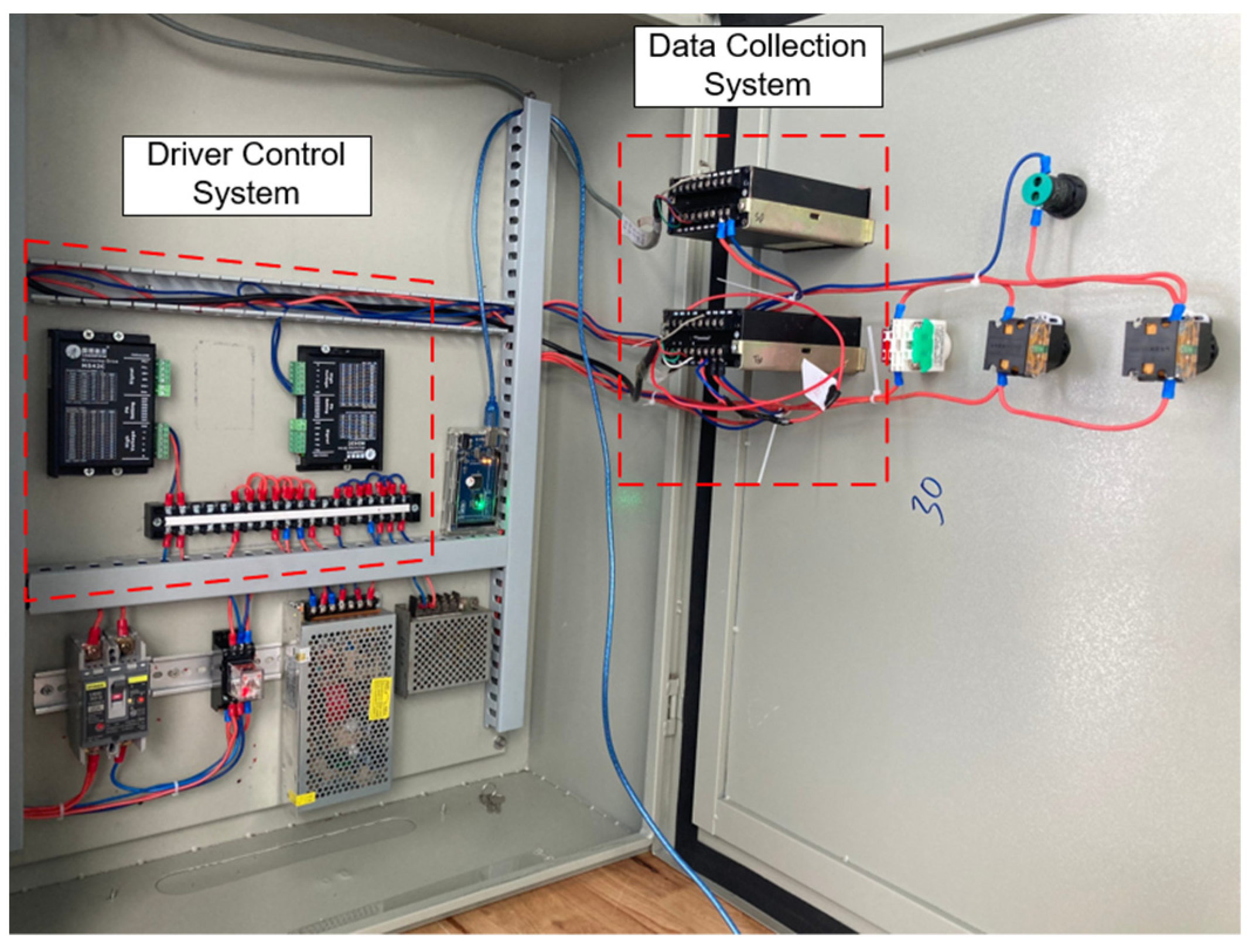
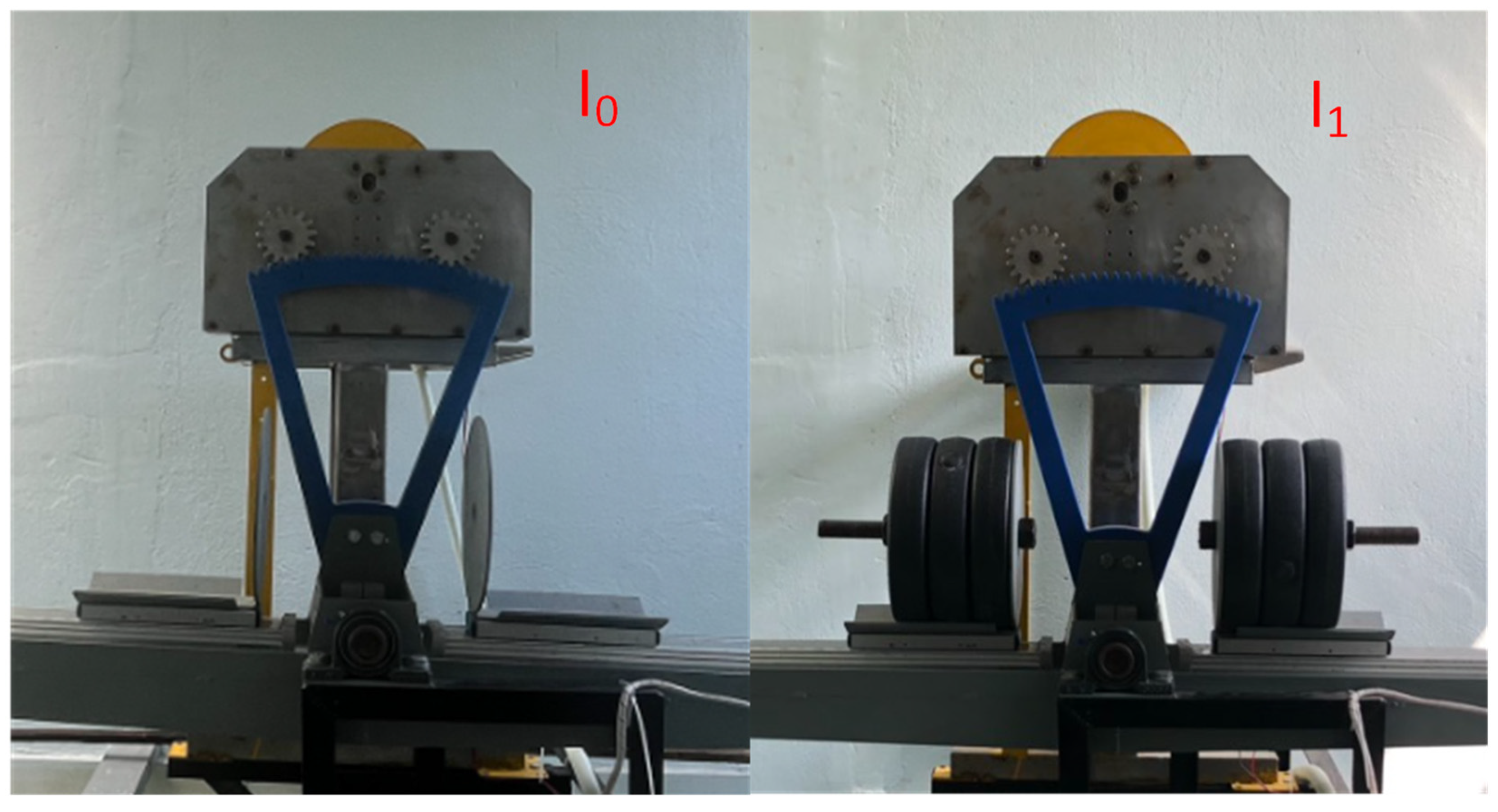
2. System Description
3. Analysis Model
3.1. Hydrodynamic Model
3.2. Hydrodynamic Parameters Calculation
3.3. PTO Model
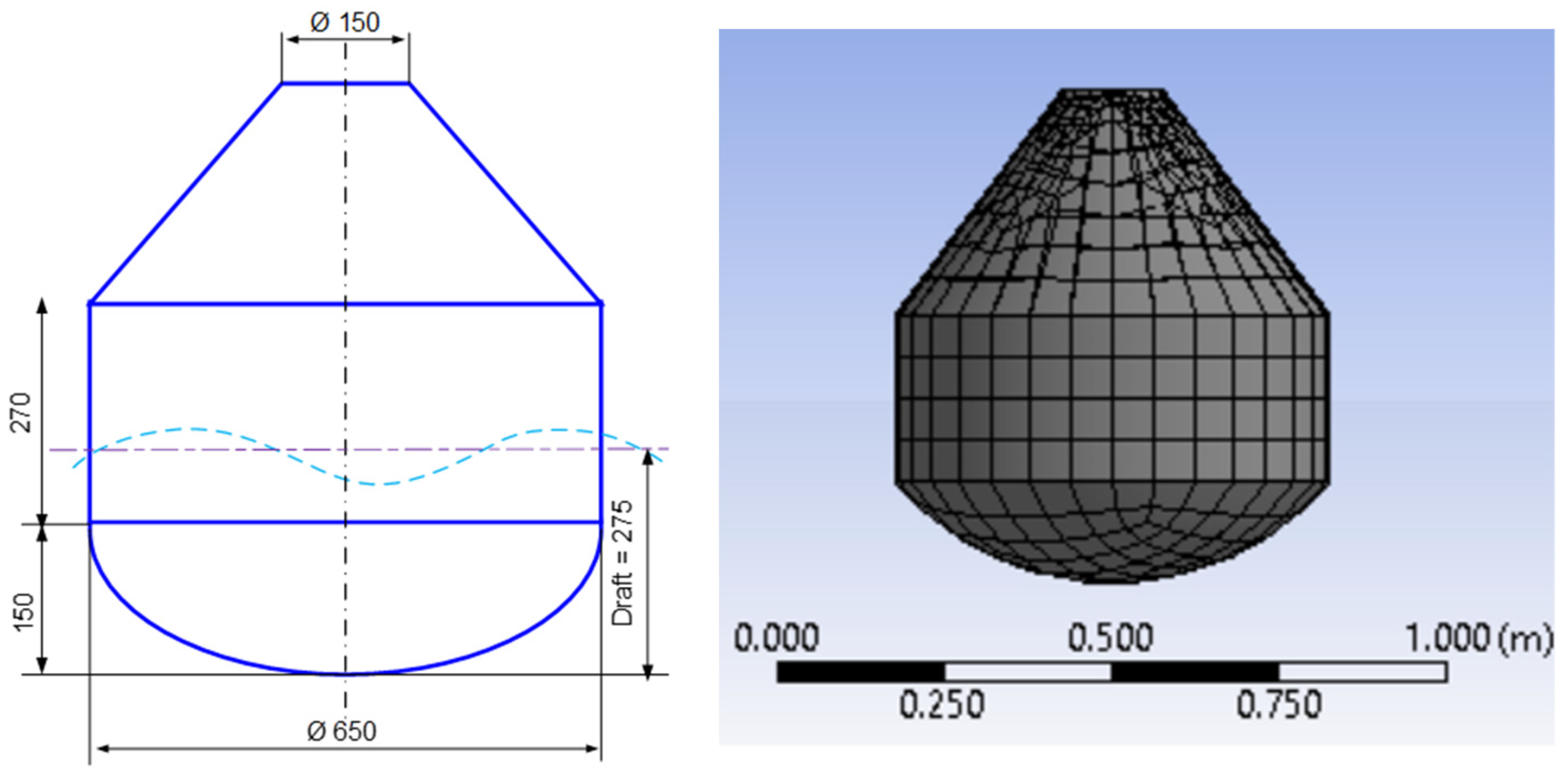
3.4. Floating Buoy Model
3.5. Generator Model
3.6. Energy Conversion Efficiency
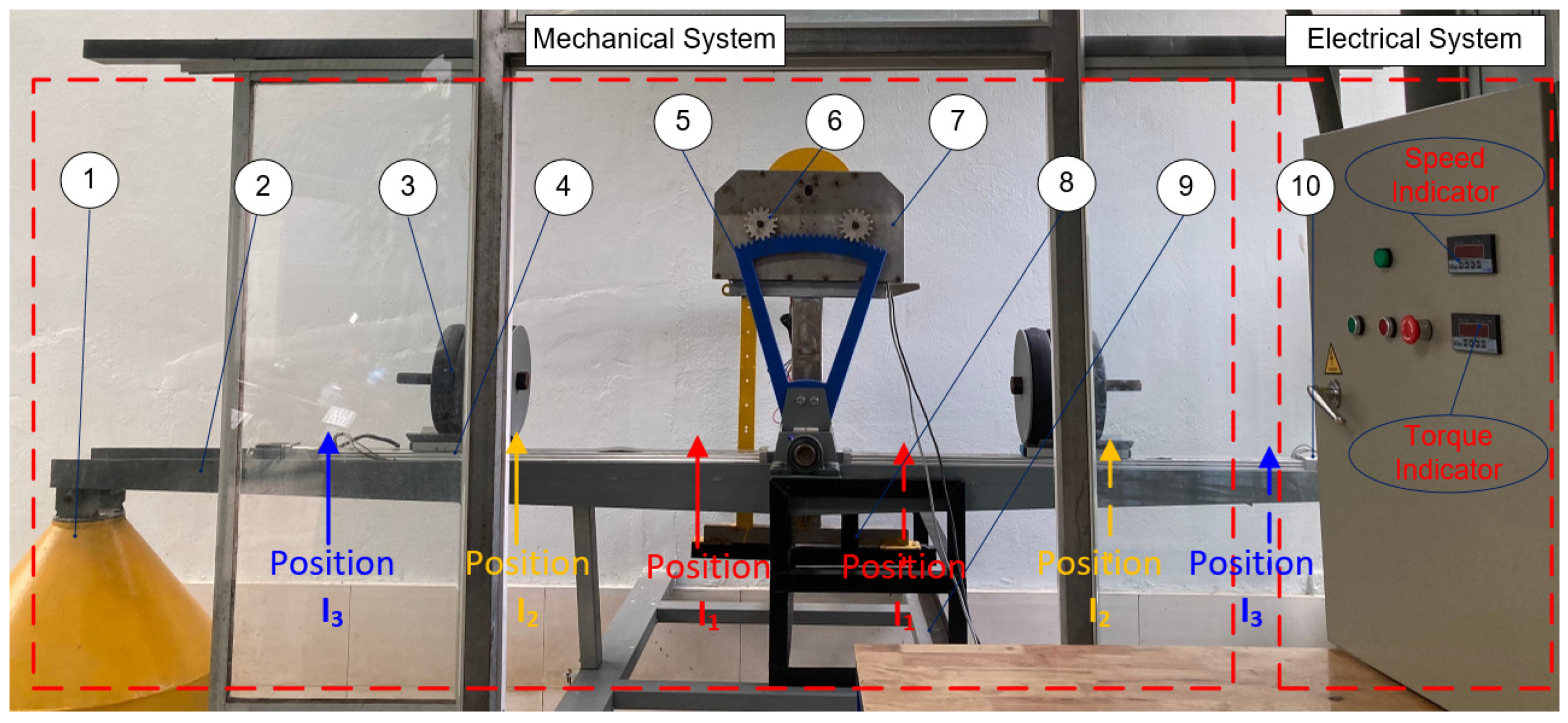
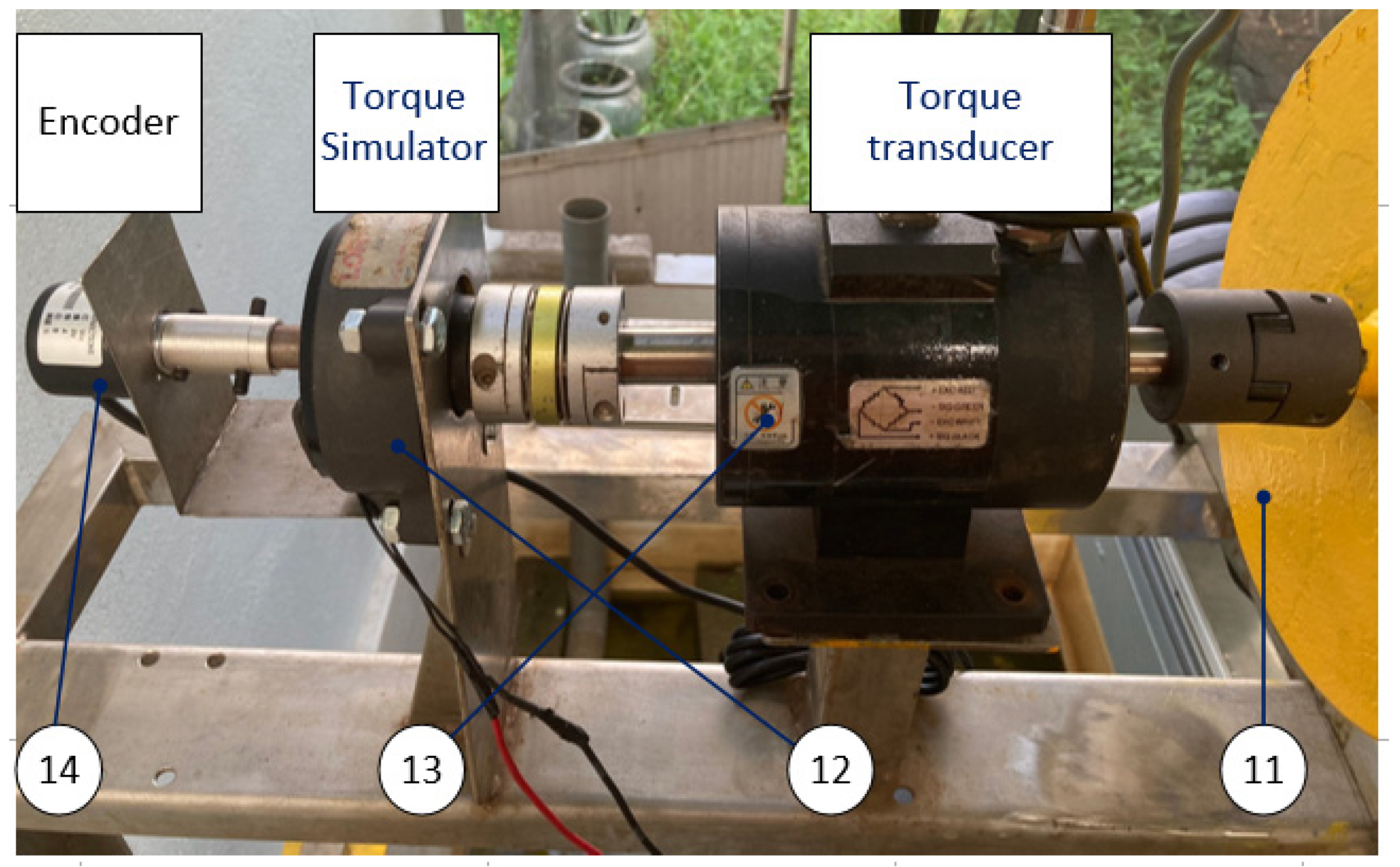
4. Test Rig in a Wave Tank
5. Set up Input Parameters
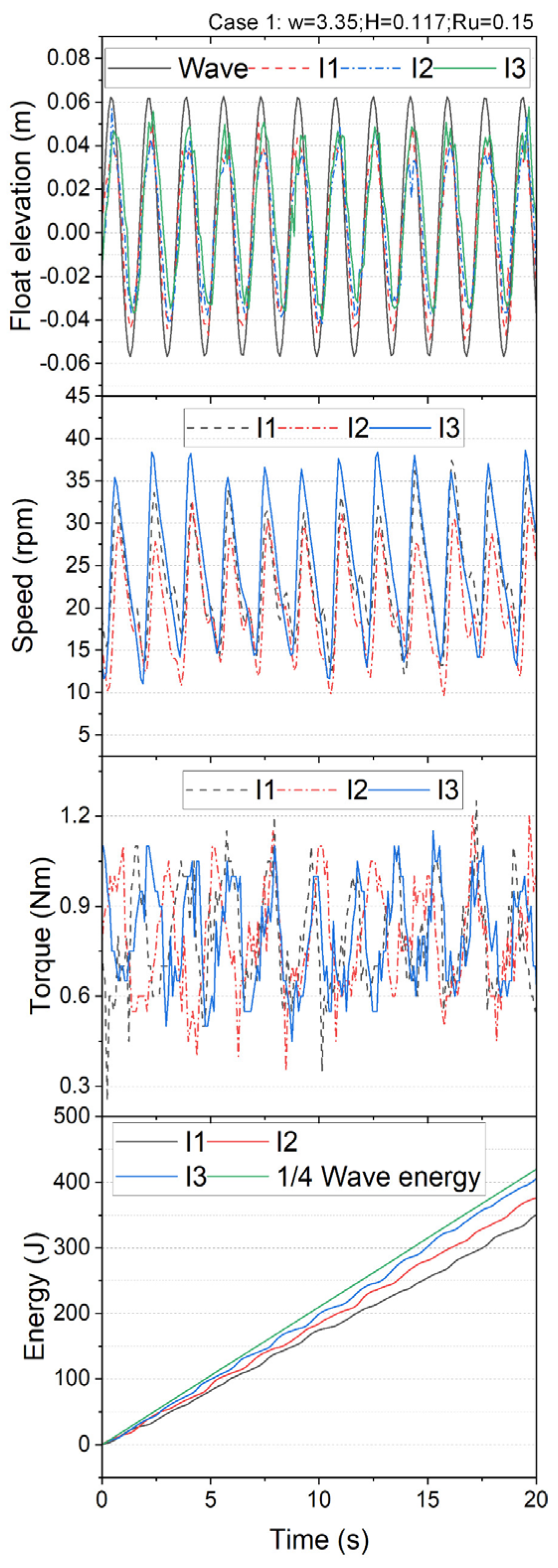
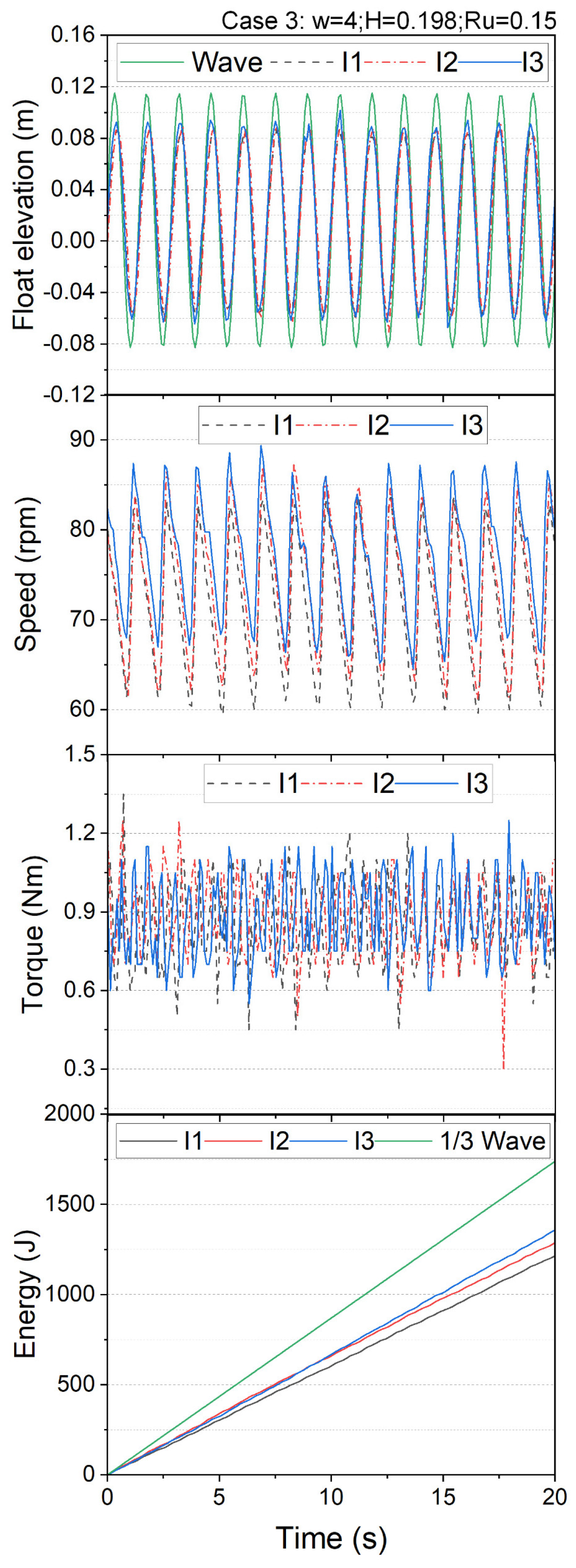
6. Test Results and Discussion
7. Conclusions
- Increasing the added inertia caused higher buoy elevations, speeds, and induced torques.
- Under different regular wave conditions, higher added inertia values led to greater generated power.
- The inertial supplementary brought the natural frequency of the PTO system closer to the excited wave frequencies, nearing resonance.
- The proposed WEC achieved a maximum overall efficiency of 39.22%.
- Added inertia tuned the natural frequency of the PTO system towards the wave excitation frequencies.
- This caused increased buoy motions and extracted more wave energy.
- However, inertia was limited by mechanical structure constraints.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Buoy radius (m) | |
| Wave amplitude (m) | |
| The water plane area of the buoy at rest (m2) | |
| The draft of initial position (m) | |
| The drag coefficient | |
| Force transition approximation coefficient (s/rad) | |
| The group velocity (m/s) | |
| The depth functions | |
| The captured width (m) | |
| The mean wave energy density per unit horizontal area (J/m2) | |
| The generated energy (J) | |
| The breakaway friction force (N) | |
| The Coulomb friction force (N) | |
| The excitation force (N) | |
| Friction force from the PTO system (N) | |
| The induced force by generator (N) | |
| The hydrodynamic force (N) | |
| The hydrostatic restoring force (N) | |
| The supplementary force (N) | |
| The resistive force from the PTO system (N) | |
| Radiation force (N) | |
| Viscous force (N) | |
| The excitation force coefficient | |
| The viscous friction coefficient | |
| Gravitational acceleration (m/s2) | |
| Wave height (m) | |
| Water depth (m) | |
| The initial inertia (kg·m2) | |
| The added inertia (kg·m2) | |
| Equivalent inertia of the flywheel (kg·m2) | |
| The supplementary inertia (kg·m2) | |
| The gear ratio | |
| The angular repetency (rad/m) | |
| Center distance of the left mass (m) | |
| Center distance of the right mass (m) | |
| The arm length (m) | |
| The added mass (kg) | |
| The buoy mass (including support structure) (kg) | |
| The added mass on the left side (kg) | |
| The added mass on the right side (kg) | |
| The rotational speed of driving shaft (rad/s) | |
| Wave elevation (m) | |
| The overall efficiency | |
| The radiation damping coefficient | |
| The torque coefficient from generator (Nms/rad) | |
| The generated power (kW) | |
| The mean wave power (kW/m) | |
| The wave power interacted with the buoy (kW) | |
| Water density (kg/m3) | |
| The buoyancy stiffness (N/m) | |
| The driving torque of the generator’s shaft (Nm) | |
| The flywheel torque (Nm) | |
| The induced torque of the generator (Nm) | |
| The phase angle (rad) | |
| Angular frequency of wave (rad/s) | |
| Natural frequency of the PTO (rad/s) | |
| Angle of rotation of the output shaft (rad) | |
| z | Buoy position [m] |
References
- Falcao, A.F.d.O. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, Y.; Sun, W.; Li, J. Ocean wave energy converters: Technical principle, device realization, and performance evaluation. Renew. Sustain. Energy Rev. 2021, 141, 110764. [Google Scholar] [CrossRef]
- Qin, J.; Zhang, Z.; Zhang, Y.; Huang, S.; Liu, Y.; Xue, G. Design and performance evaluation of novel magnetic tristable wave energy converter. Ocean Eng. 2023, 285, 115424. [Google Scholar] [CrossRef]
- Ahmad, M.M.; Kumar, A.; Alam, M.S. Harnessing of Wave Energy as Renewable Energy: An Overview. Int. J. Innov. Sci. Res. Technol. 2019, 4, 71–88. [Google Scholar]
- Kim, S.-J.; Koo, W.; Shin, M.-J. Numerical and experimental study on a hemispheric point-absorber-type wave energy converter with a hydraulic power take-off system. Renew. Energy 2018, 18, 31171–31176. [Google Scholar] [CrossRef]
- Amini, E.; Mehdipour, H.; Faraggiana, E.; Golbaz, D.; Mozafari, S.; Bracco, G.; Neshat, M. Optimization of hydraulic power take-off system settings for point absorber wave energy converter. Renew. Energy 2022, 194, 938–954. [Google Scholar] [CrossRef]
- Fan, Y.; Mu, A.; Ma, T. Design and control of a point absorber wave energy converter with an open loop hydraulic transmission. Energy Convers. Manag. 2016, 121, 13–21. [Google Scholar] [CrossRef]
- Sricharan, V.V.S.; Chandrasekaran, S. Time-domain analysis of a bean-shaped multi-body floating wave energy converter with a hydraulic power take-off using WEC-Sim. Energy 2021, 223, 119985. [Google Scholar] [CrossRef]
- Taniguchi, T.; Umeda, J.; Fujiwara, T.; Goto, H.; Inoue, S. Experimental and Numerical Study on Point Absorber Type Wave Energy Converter With Linear Generator. Ocean Renew. Energy 2017, 10, 61849. [Google Scholar]
- Umeda, J.; Goto, H.; Fujiwara, T.; Taniguchi, T.; Inoue, S. Experimental Study on Model Predictive Control for a Point Absorber Type Wave Energy Converter With a Linear Generator. Ocean Renew. Energy 2018, 10, 77724. [Google Scholar]
- Kim, J.; Kim, J.Y.; Park, J.B. Design and Optimization of a 8kW Linear Generator for a Direct-Drive Point Absorber. In Proceedings of the 2013 OCEANS-San Diego, San Diego, CA, USA, 23–27 September 2013. [Google Scholar]
- Wave Technology Inspired by the Human Heart. Available online: https://corpowerocean.com/wave-energy-technology/ (accessed on 9 October 2023).
- Liu, H.; Huang, L.; Li, Y.; Yang, J.; Zhang, J. Resonance control to eliminate reactive power of an improved dual-port direct-drive wave energy converter. Ocean Eng. 2023, 288, 116007. [Google Scholar] [CrossRef]
- Eco Wave Power: How It Works. Available online: https://www.ecowavepower.com/our-technology/how-it-works/ (accessed on 9 October 2023).
- Eco Wave Power: Why Onshore/Nearshore. Available online: https://www.ecowavepower.com/our-technology/why-onshore-nearshore/ (accessed on 9 October 2023).
- Binh, P.C.; Ahn, K.K. Performance Optimization of Dielectric Electro Active Polymers in Wave Energy Converter Application. Int. J. Precis. Eng. Manuf. 2016, 17, 1175–1185. [Google Scholar] [CrossRef]
- Dang, T.D.; Phan, C.B.; Ahn, K.K. Design and Investigation of a Novel Point Absorber on Performance Optimization Mechanism for Wave Energy Converter in Heave Mode. Int. J. Precis. Eng. Manuf.-Green Technol. 2019, 6, 477–488. [Google Scholar] [CrossRef]
- Dang, T.D.; Nguyen, M.T.; Phan, C.B.; Ahn, K.K. Development of a Wave Energy Converter with Mechanical Power Take-Off via Supplementary Inertia Control. Int. J. Precis. Eng. Manuf.-Green Technol. 2019, 6, 497–509. [Google Scholar] [CrossRef]
- Yoshimizu, K.; Sato, T.; Asai, T.; Watanabe, U.; Tsukamoto, S.; Nemoto, Y.; Taniyama, Y. An inerter-integrated wave energy converter for vibration mitigation of offshore floating buoys and its experimental validation. Ocean Eng. 2024, 303, 117789. [Google Scholar] [CrossRef]
- Bosma, B.; Zhang, Z.; Brekken, T.K.A.; Özkan-Haller, H.T.; McNatt, C.; Yim, S.C. Wave Energy Converter Modeling in the Frequency Domain: A Design Guide. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 2009–2106. [Google Scholar]
- Pastor, J.; Liu, Y. Frequency and time domain modeling and power output for a heaving point absorber wave energy converter. Int. J. Energy Environ. Eng. 2014, 5, 101. [Google Scholar] [CrossRef]
- Gowrishankaran, R.; Mudunkotuwa, D.Y. Design an Ocean Wave Energy Converter for Srilanka. In Proceedings of the IESL Young Members’ Technical Conference, Online, 9 October 2021; pp. 98–105. [Google Scholar]
- Silvia, B.; Adrià, M.M.; Alessandro, A.; Giuseppe, P.; Renata, A. Modeling of a Point Absorber for Energy Conversion in Italian Seas. Energies 2013, 6, 3033–3051. [Google Scholar] [CrossRef]
- Adolfo, S.; Alex De, S. Modeling and Simulation of a Wave Energy Converter:Multibody System Coupled to Fluid-Film Lubrication Model and Thermal Analysis. Energies 2022, 15, 9358. [Google Scholar] [CrossRef]
- Mirko, P.; Anantha, K.; Jeff, S. A Comparative Study of Model Predictive Control and Optimal Causal Control for Heaving Point Absorbers. J. Mar. Sci. Eng. 2021, 9, 805. [Google Scholar] [CrossRef]
- José Carlos, U.P.; Christian, L.M.R.; Gustavo, O.G.A. Study of a New Wave Energy Converter with Perturb and Observe Maximum Power Point Tracking Method. Sustainability 2023, 15, 10447. [Google Scholar] [CrossRef]
- Doudou, L.; Ron, P. Model Predictive Energy-Maximising Tracking Control for a Wavestar-Prototype Wave Energy Converter. J. Mar. Sci. Eng. 2023, 11, 1289. [Google Scholar] [CrossRef]
- Binh, P.C.; Tri, N.M.; Dung, D.T.; Ahn, K.K.; Kim, S.-J.; Weoncheol Koo, W. Analysis, design and experiment investigation of a novel wave energy converter. IET Gener. Transm. Distrib. 2016, 10, 460–469. [Google Scholar] [CrossRef]
- Falnes, J. Ocean Waves and Oscillating Systems, Linear Interaction Including Wave-Energy Extraction; Cambridge University: Cambridge, UK, 2002. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications | Parameters |
|---|---|
| Buoy diameter | = 0.325 m |
| Buoy draft | B = 0.275 m |
| Buoy mass | = 15 kg |
| Initial PTO inertia | = 85 kg·m2 |
| Flywheel Inertia | = 0.25 kg·m2 |
| Arm length | = 1.5 m |
| Transmission Ratio |
| Case | Wave Frequency ω (rad/s) | Wave Height H (m) | Wave Number k (rad/m) |
|---|---|---|---|
| 1 | 3.35 | 0.117 | 1.211 |
| 2 | 3.628 | 0.135 | 1.268 |
| 3 | 4 | 0.198 | 1.321 |
| Case | Added Inertia (kg·m2) |
|---|---|
| 88.5 | |
| 99.3 | |
| 117.1 |
| Specifications | Case 1 | Case 2 | Case 3 |
|---|---|---|---|
| Incident mean wave power | 88.51 W | 108.67 W | 211.46 W |
| 18.51 W | 30.44 W | 48.91 W | |
| 19.81 W | 33.7 W | 52.18 W | |
| 21.35 W | 42.62 W | 54.98 W |
| Inertia | Case 1 | Case 2 | Case 3 |
|---|---|---|---|
| 20.85% | 28.02% | 23.13% | |
| 22.39% | 31.02% | 24.68% | |
| 24.13% | 39.22% | 26.01% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phan, C.B.; Ahn, K.K. Experimental Investigation of a Point Absorber Wave Energy Converter Using an Inertia Adjusting Mechanism. Appl. Sci. 2024, 14, 5506. https://doi.org/10.3390/app14135506
Phan CB, Ahn KK. Experimental Investigation of a Point Absorber Wave Energy Converter Using an Inertia Adjusting Mechanism. Applied Sciences. 2024; 14(13):5506. https://doi.org/10.3390/app14135506
Chicago/Turabian StylePhan, Cong Binh, and Kyoung Kwan Ahn. 2024. "Experimental Investigation of a Point Absorber Wave Energy Converter Using an Inertia Adjusting Mechanism" Applied Sciences 14, no. 13: 5506. https://doi.org/10.3390/app14135506