
Automated Trucks’ Impact on Pavement Fatigue Damage

Abstract
:1. Introduction
Research Problem Statement and Research Objectives
- Assess the comparative impact of ATs relative to HDTs: Evaluate the differential effects of ATs and HDTs on pavement fatigue performance.
- Assess the wandering effect: Explore how different lateral movement patterns (wander modes) of ATs impact pavement fatigue.
- Assess the lane width effect: Examine how varying lane widths influence the fatigue performance of pavements under AT traffic.
- Assess the market penetration effect: Determine the impact of different market penetration rates of ATs on pavement fatigue.
- Assess the layers’ material and thickness effect: Investigate how different pavement layer thicknesses and material properties affect the fatigue performance under AT-induced stresses.
2. Materials and Methods
2.1. Flexible Pavement Cross-Section Combinations
2.2. Fatigue Damage Computation
2.3. Wheel Wander Incorporation in Total Fatigue Damage Computation
2.4. Computation of the Frequency Matrices () for HDTs and ATs
3. Results
3.1. Reference Pavement Structure
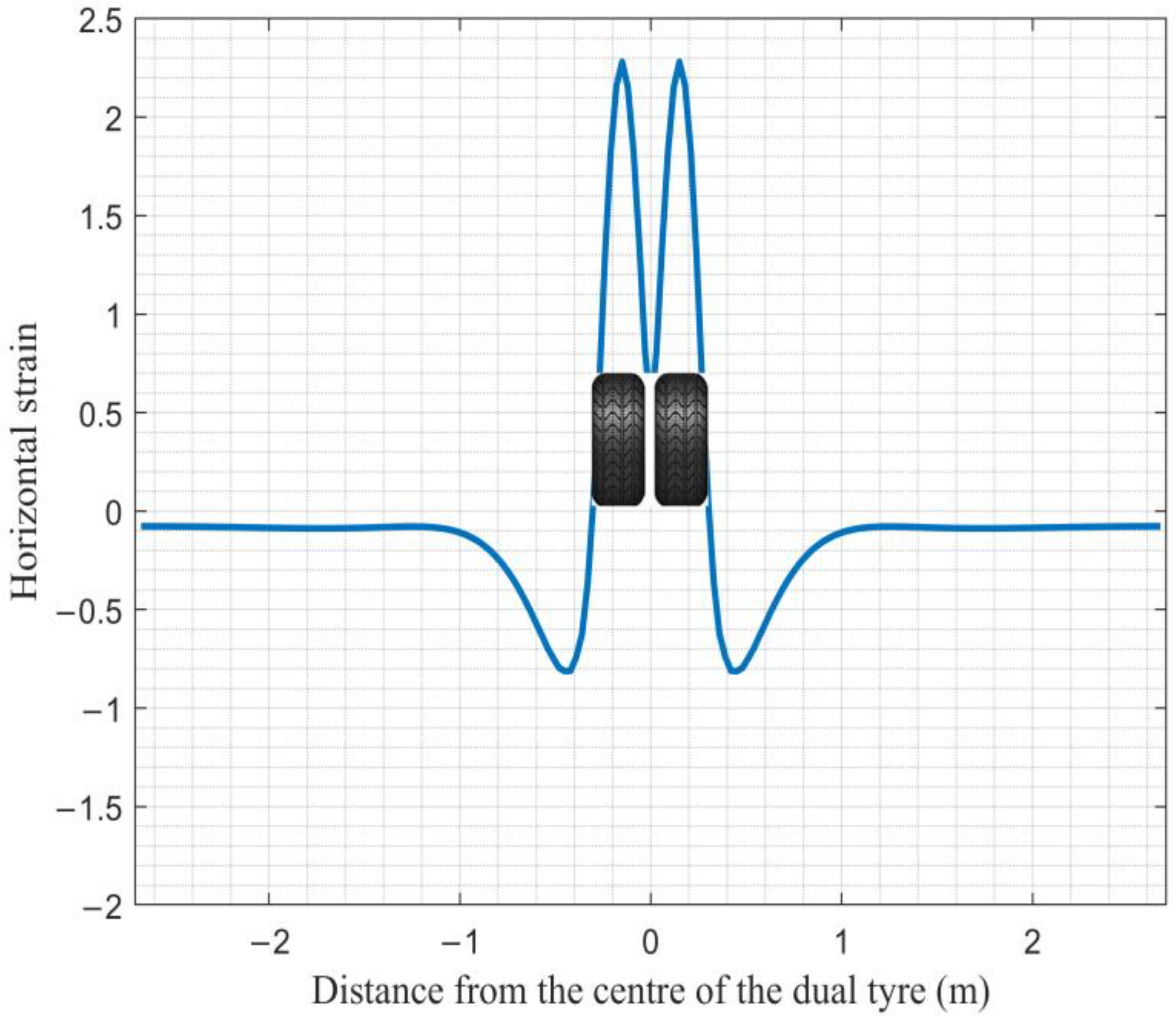
3.1.1. Horizontal Strain Distribution
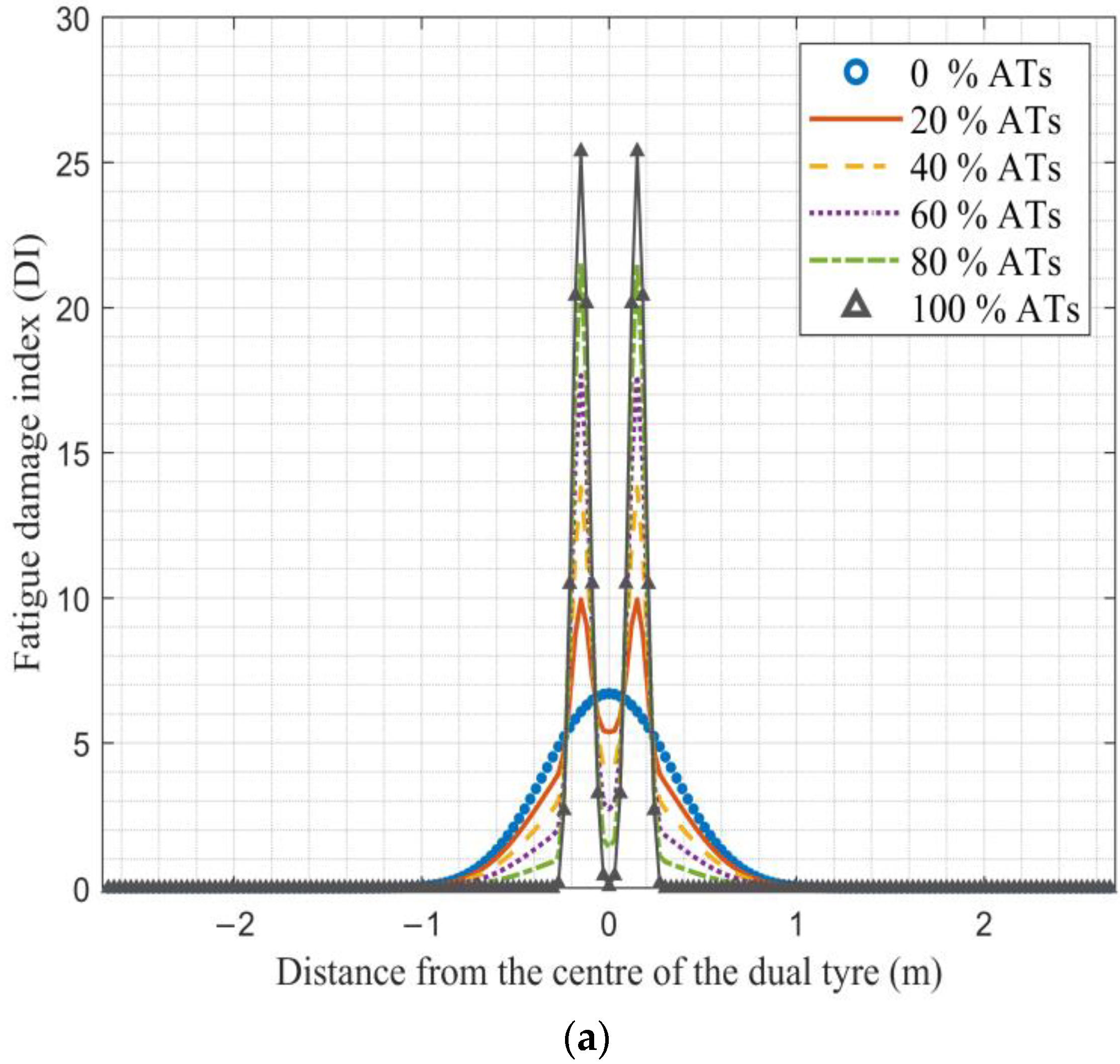
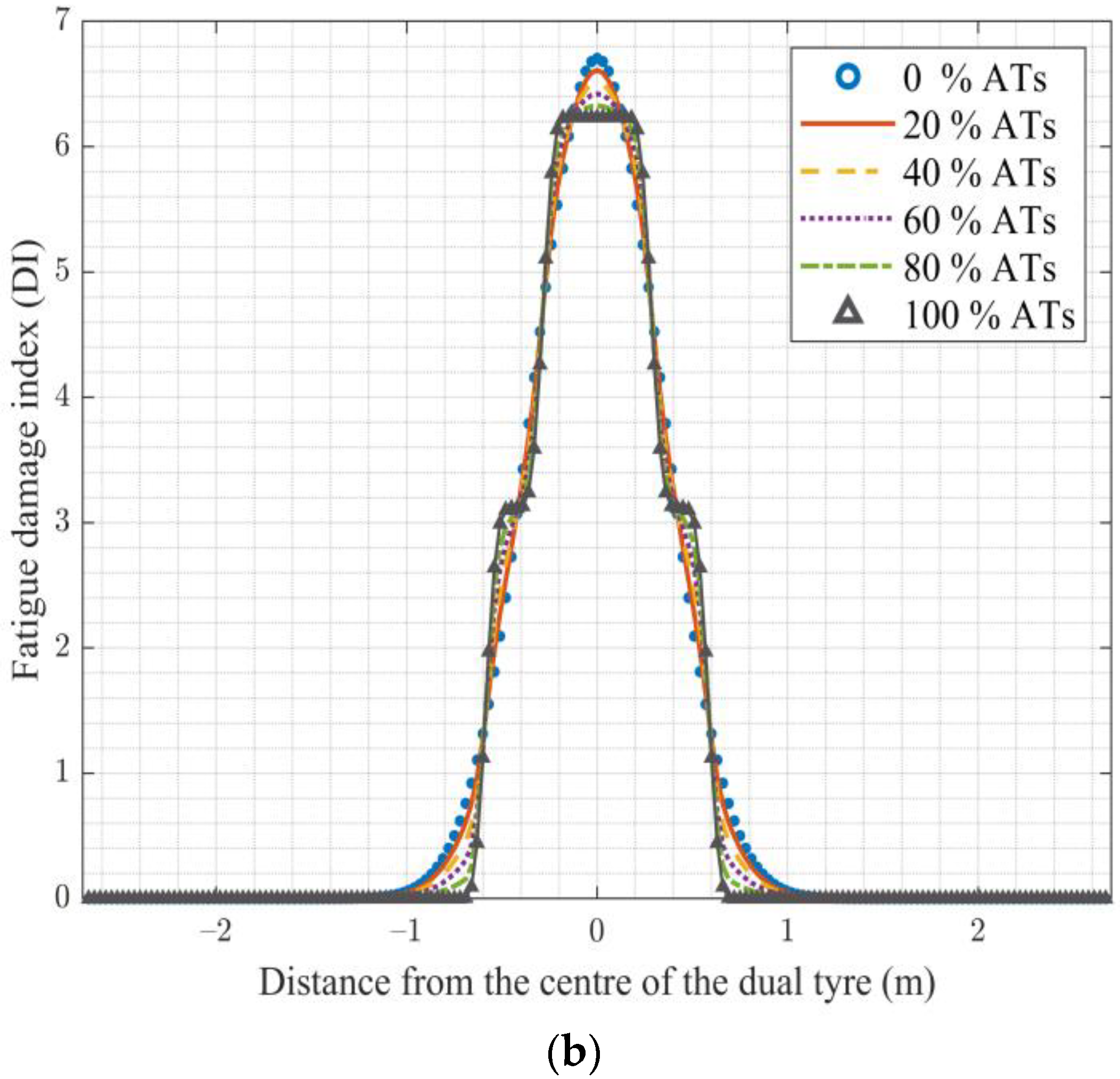
3.1.2. Fatigue Damage Index Distributions
3.2. Concise Comparative Analyses of Maximum Fatigue Damage Index
3.3. Alternative Pavement Structures
3.3.1. Layers’ Thickness Effect
3.3.2. Layers’ Stiffness Effect
3.3.3. Comparative Analyses of Layer’s Structure Effect on Fatigue DI Value
3.3.4. Overview of Fatigue Damage Index Variations across Evaluated Scenarios
4. Discussion
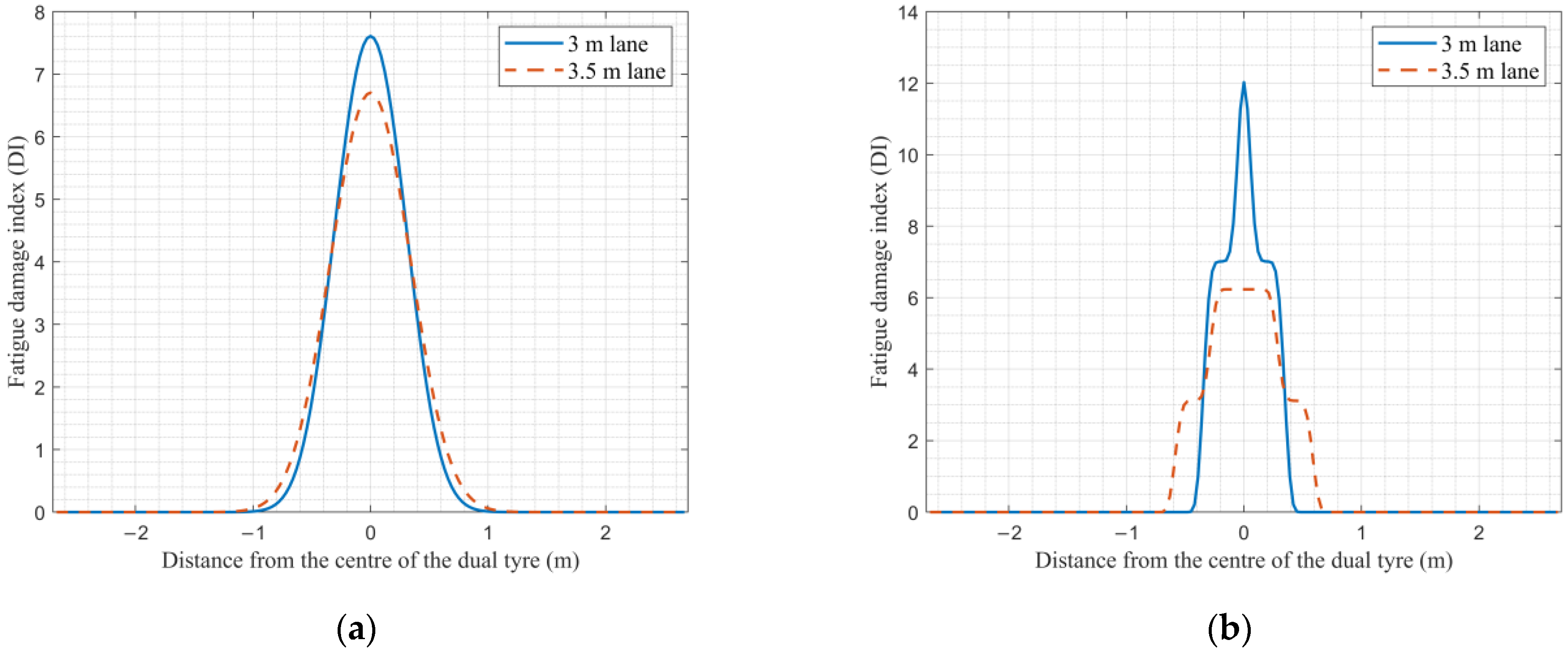
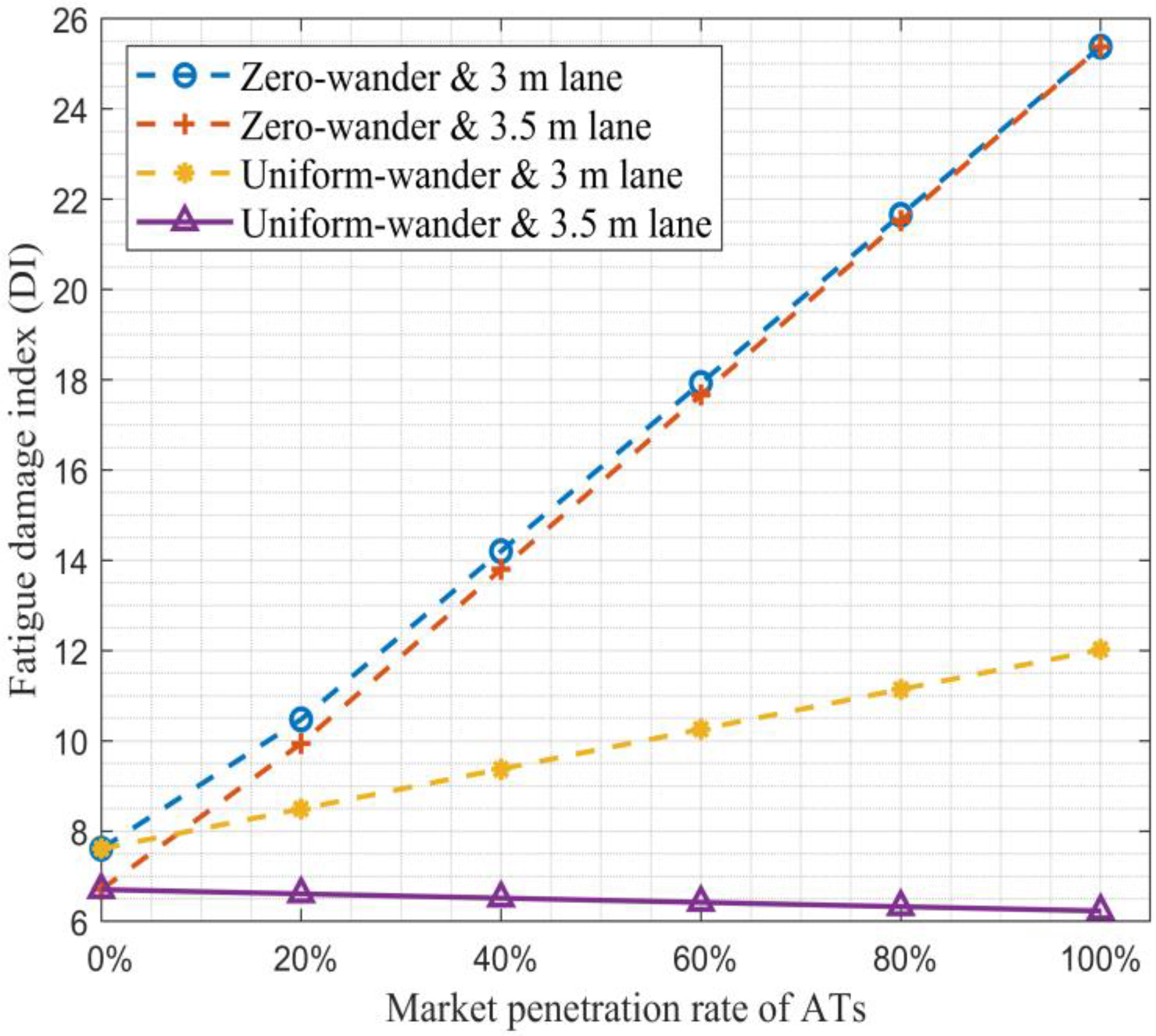
- Comparing the DI values resulting from the introduction of ATs on roads to scenarios featuring only HDTs revealed that AT deployment could either decrease the fatigue DI (i.e., ‘DI mitigator scenarios’) or increase it (i.e., ‘DI aggravator scenarios’), depending on the AT deployment scenarios. For instance, in the case of adopting a uniform-wander mode for ATs on a 3.5 m wide lane, the deployment of ATs does not negatively impact pavement fatigue performance compared to the non-AT scenarios. In contrast, it may even slightly decrease the DI values. This reduction is more considerable in the segregated scenarios than in the integrated ones. This finding is in agreement with the findings of Chen et al. [16], indicating that in the worst-case scenario where only zero-wander-distributed trucks are on the pavement, the fatigue damage is 2.7 times that of human-driven trucks. Conversely, for other lateral control modes, higher proportions of autonomous trucks result in less fatigue damage, extending pavement life.
- The findings of this study support the previous findings of Noorvand et al. [15] and Zhou et al. [17], recommending the use of uniform-wander mode for ATs compared to zero-wander mode. In addition, these findings recommend using segregated lane distribution together with the uniform-wander mode only if wider lanes (e.g., 3.5 m) are present in the era of AT deployment, in order to further reduce pavement fatigue damage in the long term (see Table 2).
- The aggravator scenarios are observed using a narrower lane of 3 m in both zero- and uniform-wander cases and in the lane width of 3.5 m only when the zero-wander mode is implemented. This is in line with the findings of Chen et al. [16], indicating that autonomous trucks’ lateral distribution increases fatigue damage at the bottom of the asphalt layer compared to traditional trucks, emphasising the need for proper lateral control to mitigate this impact. Comparing the DI values of different market penetrations revealed that the increased DI values of AT scenarios are more pronounced in the higher market penetrations than the lower ones and in the zero-wander scenarios than the uniform-wander ones. Chen et al. [16] also argued that the damage increases with a higher proportion of ATs.
- Although using the uniform-wander mode could result in lower fatigue damage than the zero-wander mode, this could still cause more damage than the non-AT scenarios for the narrower lane of 3 m. Thus, in the DI aggravator scenarios, the increased fatigue damage percentages induced by ATs are considerable, and further actions, such as increasing the thickness or stiffness of the layers, should be performed to mitigate their negative impact on pavement fatigue performance.
- A practical implication for lane distribution management is recommending integrated lane distributions for ATs (i.e., compared with segregated cases) in the DI aggregator scenarios. This could reduce the adverse negative impact of AT deployment on pavement fatigue.
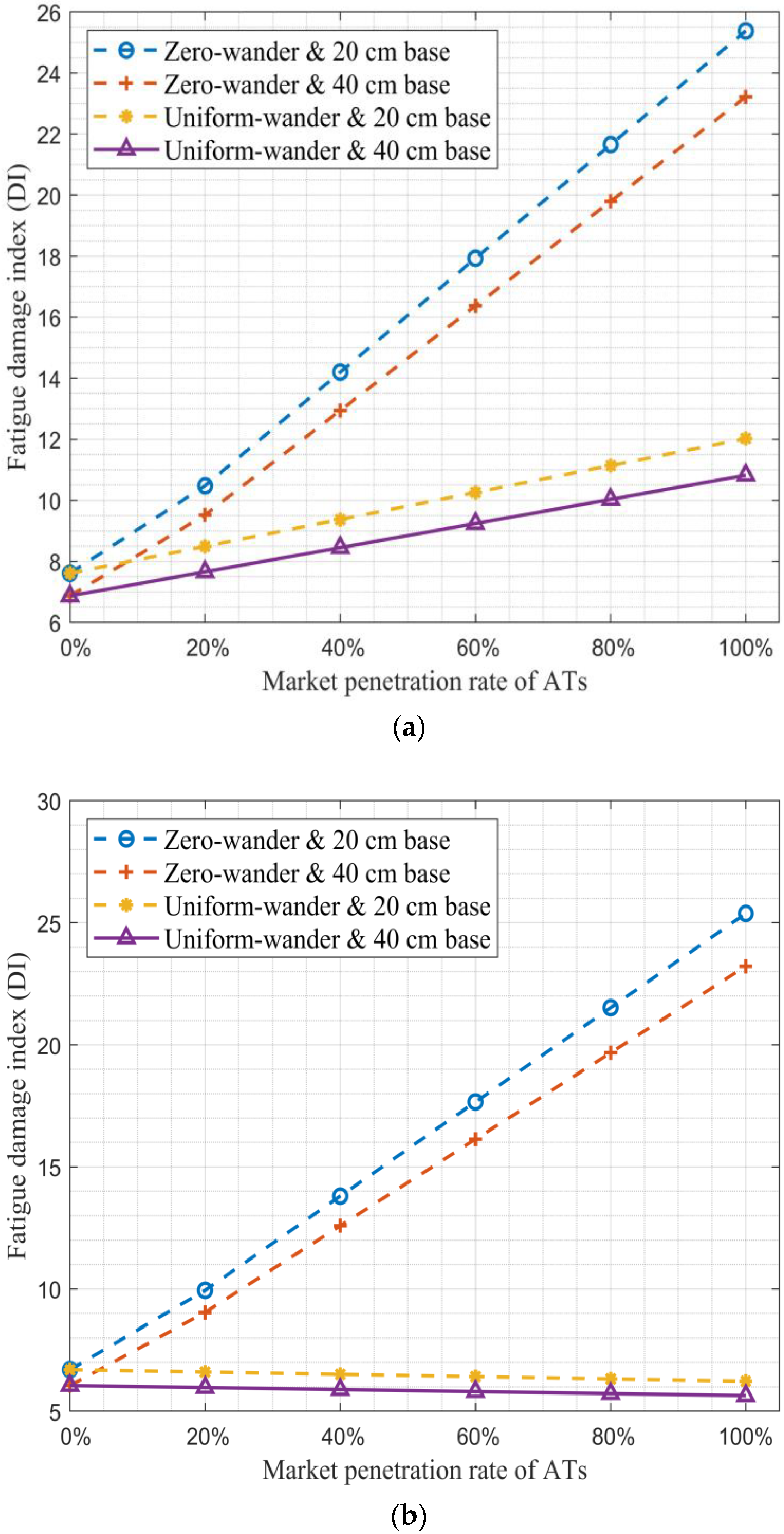
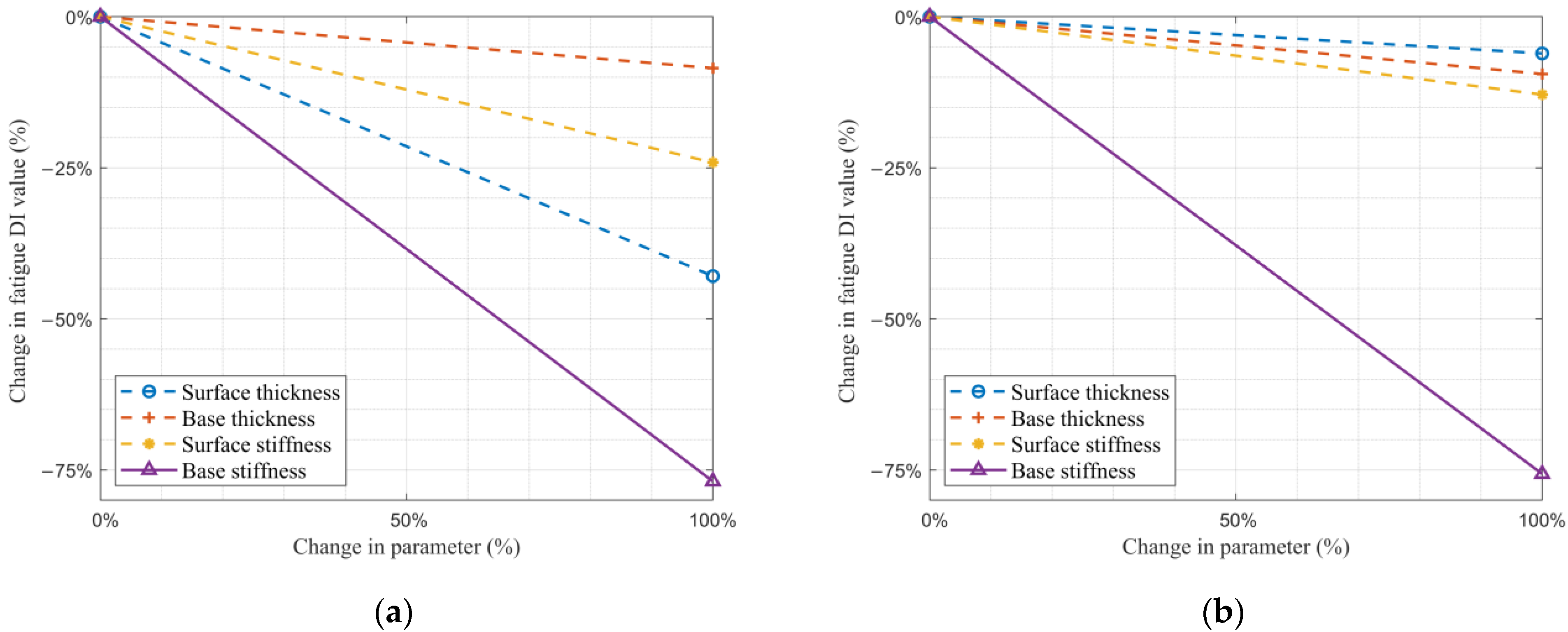
- Comparing the effect of increased surface layer thickness and base layer thickness on the reduced percentages of DI values (see Table 2) revealed a practical implication that the use of a thicker surface layer could be more effective in mitigating the ATs’ negative impact on pavement fatigue damage than the use of a thicker base layer for the zero-wander mode (see Figure 11a). In contrast, when using the uniform-wander mode, the observed results are the other way around, meaning that the thicker base layer could be more effective in reducing fatigue damage (see Figure 11b). However, an economic analysis study is needed to compare the costs of increasing the surface and base layer thickness and the benefits of prolonging the pavement life and reduced maintenance costs obtained from each DI mitigation solution.
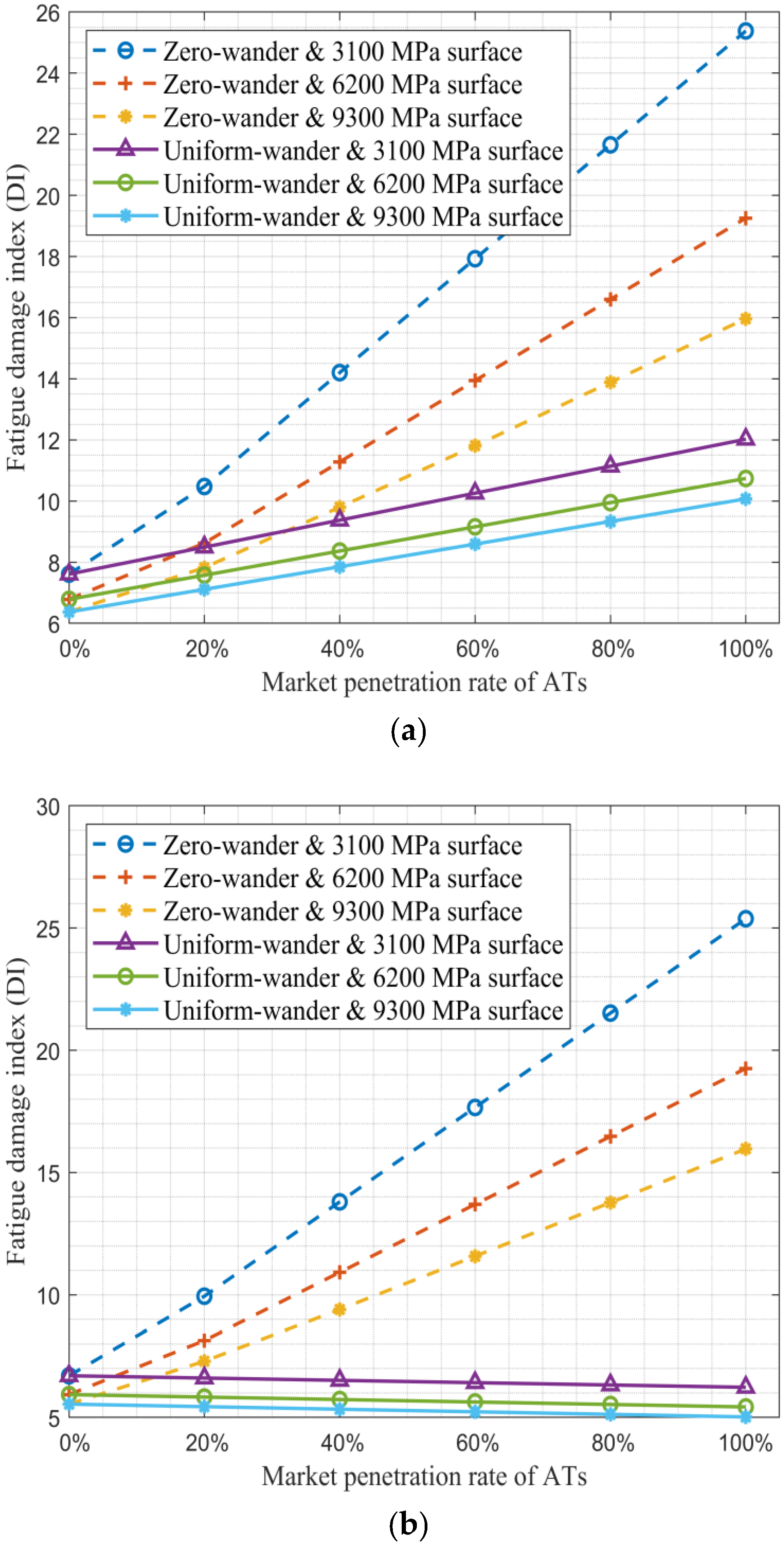
- Increasing the stiffness of the surface and base layer could result in reduced maximum DI values for the zero-wander mode, with more pronounced differences in the higher penetration rates. These results indicate that the stiffness of the base and surface layer plays a crucial role in mitigating the impact of ATs’ wander mode on the pavement’s fatigue performance. Notably, the reduced rates of maximum DI values caused by an increased surface layer stiffness are significantly lower for the uniform-wander mode compared to the zero-wander mode. Furthermore, in agreement with the findings of Georgouli et al. [8], the present study showed that the increased thickness of the HMA layer has a more significant impact on reducing fatigue damage than its stiffness for the zero-wander mode cases (see Figure 11a).
- The reduced percentage rates of maximum BUDI values caused by increased base layer stiffness are around 75.51% to 76.88% in all the penetration rates, which indicates that the effect of base layer stiffness on fatigue performance is consistent across different levels of market penetration rates, and is consistently higher compared to the impact of surface layer thickness increase (see Figure 11). These results suggest that investing in higher base layer stiffness could be a promising strategy to mitigate the negative impacts of ATs’ wander mode on the pavement’s fatigue performance in all the penetration rates in the aggravator scenarios.
Limitations and Future Research
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AT | Automated Trucks |
| BU | Bottom-Up |
| BUDI | Bottom-Up Damage Index |
| DI | Damage Index |
| FC | Fatigue Cracking |
| FEM | Finite Element Method |
| HDT | Human-Driven Trucks |
| HMA | Hot Mix Asphalt |
| MEPDG | Mechanistic–Empirical Pavement Design Guide |
| SD | Standard Deviation |
References
- Gungor, O.E.; Al-Qadi, I.L. All for one: Centralized optimization of truck platoons to improve roadway infrastructure sustainability. Transp. Res. Part C Emerg. Technol. 2020, 114, 84–98. [Google Scholar] [CrossRef]
- Gungor, O.E.; Al-Qadi, I.L. Wander 2D: A flexible pavement design framework for autonomous and connected trucks. Int. J. Pavement Eng. 2020, 23, 121–136. [Google Scholar] [CrossRef]
- Chen, F.; Song, M.; Ma, X. A lateral control scheme of autonomous vehicles considering pavement sustainability. J. Clean. Prod. 2020, 256, 120669. [Google Scholar] [CrossRef]
- Song, M.; Chen, F.; Ma, X. Organization of autonomous truck platoon considering energy saving and pavement fatigue. Transp. Res. Part D Transp. Environ. 2020, 90, 102667. [Google Scholar] [CrossRef]
- Srisomboon, I.; Lee, S. Efficient position change algorithms for prolonging driving range of a truck platoon. Appl. Sci. 2021, 11, 10516. [Google Scholar] [CrossRef]
- Lee, S.; Cho, K.; Park, H.; Cho, D. Cost-Effectiveness of Introducing Autonomous Trucks: From the Perspective of the Total Cost of Operation in Logistics. Appl. Sci. 2023, 13, 10467. [Google Scholar] [CrossRef]
- Kim, J. Truck platoon control considering heterogeneous vehicles. Appl. Sci. 2020, 10, 5067. [Google Scholar] [CrossRef]
- Georgouli, K.; Plati, C. Autonomous trucks’ (ATs) lateral distribution and asphalt pavement performance. Int. J. Pavement Eng. 2022, 24, 2046274. [Google Scholar] [CrossRef]
- Yeganeh, A.; Vandoren, B.; Pirdavani, A. Pavement rutting performance analysis of automated vehicles: Impacts of wander mode, lane width, and market penetration rate. Int. J. Pavement Eng. 2023, 24, 2049264. [Google Scholar] [CrossRef]
- Pais, J.; Pereira, P.; Thives, L. Wander Effect on Pavement Performance for Application in Connected and Autonomous Vehicles†. Infrastructures 2023, 8, 119. [Google Scholar] [CrossRef]
- Othman, K. Impact of autonomous vehicles on the physical infrastructure: Changes and challenges. Designs 2021, 5, 40. [Google Scholar] [CrossRef]
- Guo, R.; Liu, S.; He, Y.; Xu, L. Study on Vehicle–Road Interaction for Autonomous Driving. Sustainability 2022, 14, 11693. [Google Scholar] [CrossRef]
- Severino, A.; Curto, S.; Barberi, S.; Arena, F.; Pau, G. Autonomous vehicles: An analysis both on their distinctiveness and the potential impact on urban transport systems. Appl. Sci. 2021, 11, 3604. [Google Scholar] [CrossRef]
- Chen, F.; Balieu, R.; Kringos, N. Potential Influences on Long-Term Service Performance of Road Infrastructure by Automated Vehicles. Transp. Res. Rec. J. Transp. Res. Board 2016, 2550, 72–79. [Google Scholar] [CrossRef]
- Noorvand, H.; Underwood, B.S. Autonomous Vehicles: Assessment of the Implications of Truck Positioning on Flexible Pavement Performance and Design. Transp. Res. Rec. 2017, 2640, 21–28. [Google Scholar] [CrossRef]
- Chen, F.; Song, M.; Ma, X.; Zhu, X. Assess the impacts of different autonomous trucks’ lateral control modes on asphalt pavement performance. Transp. Res. Part C Emerg. Technol. 2019, 103, 17–29. [Google Scholar] [CrossRef]
- Zhou, F.; Hu, S.; Chrysler, S.T.; Kim, Y.; Damnjanovic, I.; Talebpour, A.; Espejo, A. Optimization of Lateral Wandering of Automated Vehicles to Reduce Hydroplaning Potential and to Improve Pavement Life. Transp. Res. Rec. 2019, 2673, 81–89. [Google Scholar] [CrossRef]
- Rana, M.M.; Hossain, K. Simulation of autonomous truck for minimizing asphalt pavement distresses. Road Mater. Pavement Des. 2021, 23, 1266–1286. [Google Scholar] [CrossRef]
- Georgouli, K.; Plati, C.; Loizos, A. Autonomous vehicles wheel wander: Structural impact on flexible pavements. J. Traffic Transp. Eng. 2021, 8, 388–398. [Google Scholar] [CrossRef]
- Chen, L.; Chen, D.; Chen, C.; Jiang, X.; Liu, L. Dynamic Impact Analysis of Automated Bus on Asphalt Pavement. In Proceedings of the 3rd International Forum on Connected Automated Vehicle Highway System through the China Highway & Transportation Society, Jinan, China, 23–25 October 2020. [Google Scholar] [CrossRef]
- Yeganeh, A.; Vandoren, B.; Pirdavani, A. The Effects of Automated Vehicles Deployment on Pavement Rutting Performance. In Airfield and Highway Pavements; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2021; pp. 280–292. [Google Scholar] [CrossRef]
- Merhebi, G.H.; Joumblat, R.; Elkordi, A. Assessment of the Effect of Different Loading Combinations Due to Truck Platooning and Autonomous Vehicles on the Performance of Asphalt Pavement. Sustainability 2023, 15, 10805. [Google Scholar] [CrossRef]
- Tian, G.; Jia, Y.; Chen, Z.; Gao, Y.; Wang, S.; Wei, Z.; Chen, Y.; Zhang, T. Evaluation on Lateral Stability of Vehicle: Impacts of Pavement Rutting, Road Alignment, and Adverse Weather. Appl. Sci. 2023, 13, 3250. [Google Scholar] [CrossRef]
- Ma, X.; Shangguan, L.; Si, C. Probability Distributions of Asphalt Pavement Responses and Performance under Random Moving Loads and Pavement Temperature. Appl. Sci. 2023, 13, 715. [Google Scholar] [CrossRef]
- Yeganeh, A.; Vandoren, B.; Pirdavani, A. Impacts of Load Distribution and Lane Width on Pavement Rutting Performance for Automated Vehicles. Int. J. Pavement Eng. 2021, 23, 4125–4135. [Google Scholar] [CrossRef]
- Hayeri, Y.M.; Hendrickson, C.; Biehler, A.D. Potential impacts of vehicle automation on design, infrastructure and investment decisions-a state dot perspective. In Proceedings of the Transportation Research Board 94th Annual Meeting, Washington, DC, USA, 11–15 January 2015. [Google Scholar]
- Heinrichs, D. Autonomous driving and urban land use. In Autonomous Driving; Springer: Cham, Switzerland, 2016; pp. 213–231. [Google Scholar]
- Machiani, S.G.; Ahmadi, A.; Musial, W.; Katthe, A.; Melendez, B.; Jahangiri, A. Implications of a Narrow Automated Vehicle-Exclusive Lane on Interstate 15 Express Lanes. J. Adv. Transp. 2021, 2021, 6617205. [Google Scholar] [CrossRef]
- Hafiz, D.; Zohdy, I. The City Adaptation to the Autonomous Vehicles Implementation: Reimagining the Dubai City of Tomorrow. In Towards Connected and Autonomous Vehicle Highways; Springer: Berlin/Heidelberg, Germany, 2021; pp. 27–41. [Google Scholar]
- McCullah, J.; Gray, D. National Cooperative Highway Research Program. 2005, Volume 10. Available online: https://onlinepubs.trb.org/onlinepubs/nchrp/nchrp_rpt_480.pdf (accessed on 28 May 2024).
- Coca, A.M.; Romanoschi, S.A.; Talebsafa, M.; Popescu, C. Simple Method for Incorporating Lateral Wheel Wander in the Computation of Fatigue Damage in New Flexible Pavement Structures. J. Transp. Eng. Part B Pavements 2020, 146, 04020074. [Google Scholar] [CrossRef]
- Canestrari, F.; Ingrassia, L.P. A review of top-down cracking in asphalt pavements: Causes, models, experimental tools and future challenges. J. Traffic Transp. Eng. 2020, 242, 118043. [Google Scholar] [CrossRef]
- Smith, M. ABAQUS/Standard User’s Manual, Version 6.9; Dassault Systèmes Simulia Corp.: Providence, RI, USA, 2009. [Google Scholar]
- Buiter, R.; Cortenraad, W.M.H.; van Eck, A.C.; van Rij, H. Effects of transverse distribution of heavy vehicles on thickness design of full-depth asphalt pavements. Transp. Res. Rec. 1989, 1227, 66–74. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Thickness (cm) | Stiffness (MPa) | Poisson’s Ratio |
|---|---|---|---|
| HMA Layer | 10, 15, 20 | 3100, 6200, 9300 | 0.3 |
| Base Layer | 20, 40 | 300, 600 | 0.35 |
| Subgrade Layer | Assumed to be infinite thickness | 100 | 0.4 |
| Lane Width | 3 m | 3.5 m | ||||||
|---|---|---|---|---|---|---|---|---|
| Scenario | Integrated | Segregated | Integrated | Segregated | ||||
| Market Penetration Rate | 20% to 80% | 100% | 20% to 80% | 100% | ||||
| Wander Mode of ATs | Zero | Uniform | Zero | Uniform | Zero | Uniform | Zero | Uniform |
| Percentage Change of DI Compared to the Reference Scenario (0% ATs) | +37.67% to +184% | +11.6% to +46.41% | +233.57% | +58.01% | +48.29% to +221% | −1.41% to −5.64% | +278.57% | −7.05% |
| Aggravator/Mitigator | Aggravator | Aggravator | Aggravator | Aggravator | Aggravator | Mitigator | Aggravator | Mitigator |
| Reduced Percentage of DI by Increasing the HMA Layer’s Thickness from 10 cm to 20 cm | −17.59% to −40.04% | −0.06% to −1.44% | −42.92% | −1.76% | −20.58% to −40.43% | NA * | −42.92% | NA |
| Reduced Percentage of DI by Increasing the Base Layer’s Thickness from 20 cm to 40 cm | −9.10% to −8.58% | −9.82% to −9.95% | −8.51% | −9.98% | −9.06% to −8.51% | NA | −8.51% | NA |
| Reduced Percentage of DI by Increasing the HMA Layer’s Stiffness from 3100 MPa to 9300 MPa | −25.32% to −35.87% | −16.26% to −16.24% | −37.90% | −16.23% | −26.62% to −36.01% | NA | −37.09% | NA |
| Reduced Percentage of DI by Increasing the Base Layer’s Stiffness from 300 MPa to 600 MPa | −76.20% to −76.8% | −75.51% to −75.55% | −76.88% | −75.55% | −76.24% to −76.81% | NA | −76.88% | NA |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yeganeh, A.; Vandoren, B.; Pirdavani, A. Automated Trucks’ Impact on Pavement Fatigue Damage. Appl. Sci. 2024, 14, 5552. https://doi.org/10.3390/app14135552
Yeganeh A, Vandoren B, Pirdavani A. Automated Trucks’ Impact on Pavement Fatigue Damage. Applied Sciences. 2024; 14(13):5552. https://doi.org/10.3390/app14135552
Chicago/Turabian StyleYeganeh, Ali, Bram Vandoren, and Ali Pirdavani. 2024. "Automated Trucks’ Impact on Pavement Fatigue Damage" Applied Sciences 14, no. 13: 5552. https://doi.org/10.3390/app14135552