
E-Waste Management in Serbia, Focusing on the Possibility of Applying Automated Separation Using Robots



Abstract
:1. Introduction
- Group/subgroup 16 02: waste not otherwise specified in the catalog/waste from electrical and electronic equipment: of the eight listed types of this kind of waste, as many as six are marked as hazardous waste.
- Group/subgroup 20 01: municipal waste (domestic waste and similar commercial industrial waste), including separately collected fractions (exception 15 01)—where 14 types of hazardous waste are located, with emphasis on discarded electronic and electrical equipment containing hazardous components.
- Review waste separation technologies using robots using the Preferred Reporting Items for Systematic reviews and Meta-Analyses (PRISMA) framework;
- Analyze the existing practice of e-waste management in the Republic of Serbia with key problem and solution identification in legislation, infrastructure and social behavior;
- Examine the possibility of using robots in the e-waste separation process in Serbia in the specific example of the “E-Reciklaža” recycling center in Niš, Serbia, which will include technical and economic feasibility, expected benefits and potential challenges.
2. E-Waste Management System
- Collection—carried out at the place of origin.
- Sorting—involves sorting according to the categories of waste from electrical and electronic devices, and can be performed at the household level, at the local community level, at the landfill, or at recycling centers.
- Separation—includes shredding, separation of recyclable from non-recyclable parts, and separation of useful components by one of the usual separation methods. The final quality of the recyclate depends on the efficiency of this step.
- Final processing—involves the processing of previously separated recyclable materials by hydrometallurgical or pyrometallurgical process.
- Disposal of non-recyclable parts of e-waste.
- Reducing the amount of waste;
- Extending the exploitation life of the landfill;
- Controlling the management of hazardous waste, which is separated from nonhazardous waste in a timely manner by proper sorting;
- Increasing the efficiency of recycling;
- Overall environmental protection.
3. Review of Papers Dealing with the Application of Robots in Waste Separation
3.1. Selection of Papers
3.2. The Major Findings of the Selected Papers
- Vision systems and artificial intelligence algorithms.
- Robotic systems with grippers.
- Sensors: most commonly cameras and/or optical sensors.
- Image processing hardware: consists of processors (e.g., microprocessors, a Digital Signal Processor (DSP), and a Field Programmable Gate Array (FPGA)) that enable fast processing of captured images and memory that serves to temporarily store data during image processing.
- Image processing software, which can be separated into two parts:
- (a)
- Image analysis algorithms that include algorithms for filtering, segmentation, pattern recognition, classification, and other visual data processing;
- (b)
- Machine learning and artificial intelligence, where algorithms are developed that use deep learning techniques to recognize and interpret complex visual patterns.
- Level 1: Occlusion removal—removing objects that overlap other objects makes it easier for the vision system to recognize objects and capture them later.
- Level 2: Optimal distance—moving the object to allow enough space for the robot’s gripper to grasp the object.
- Level 3: Optimum Grasping Position—placing the item to be sorted in a position that is ideal for grasping by the robot.
4. E-Waste Management in Serbia—Current Situation

4.1. Obstacles and Potential Solutions in the E-Waste Management System in SERBIA
4.1.1. Legal Obstacles
- The absence of a legal framework for the establishment of collective and individual schemes according to the principle of waste management, “producer responsibility” in Serbian legal acts, as prescribed by Article 5 of Directive 2012/19/EU.
- The absence of a legal framework for establishing a National Register for manufacturers or importers of electrical and electronic equipment in Serbian legal acts, as prescribed by Article 16 of Directive 2012/19/EU.
- The absence of prescribed obligations of separate collection, treatment, reuse, and disposal of e-waste in Serbian legal acts, as provided for in Articles 5, 12, and 13 of Directive 2012/19/EU.
- The absence of a prescribed financial guarantee by the manufacturer or importer of electrical and electronic equipment that they will finance the responsible management of e-waste in Serbian legal acts, as prescribed in Article 12 of Directive 2012/19/EU.
- The inconsistency of prescribed national goals for the collection and recycling of e-waste with European goals, prescribed by Article 7 of Directive 2012/19/EU. Moreover, Serbian legal acts do not define who is in charge of implementing the goals.
4.1.2. Organizational Obstacles
4.1.3. Sociological Obstacles
4.1.4. Potential Solutions to the Problem
- Improving and harmonizing legal acts with European ones, which would make e-waste management strictly controlled;
- Harmonizing e-waste recycling goals with European ones and encouraging intensive engagement in their fulfillment;
- Increasing environmental awareness among citizens of Serbia, through constant education and the implementation of a targeted campaign through the media;
- Incorporating the private sector into the e-waste management system, in order to influence the system through the production of electrical and electronic devices, by incorporating recyclable materials, building recycling facilities and financial motivation by the state;
- Supporting research activities in the field of development of innovative e-waste separation technologies;
- Improving the infrastructure for e-waste management through the provision of all necessary facilities for the collection, transport, and recycling of e-waste.
5. Case Study: The Possibility of Using Robots in E-Waste Separation in the “E-Reciklaža” Recycling Plant, Niš, Serbia
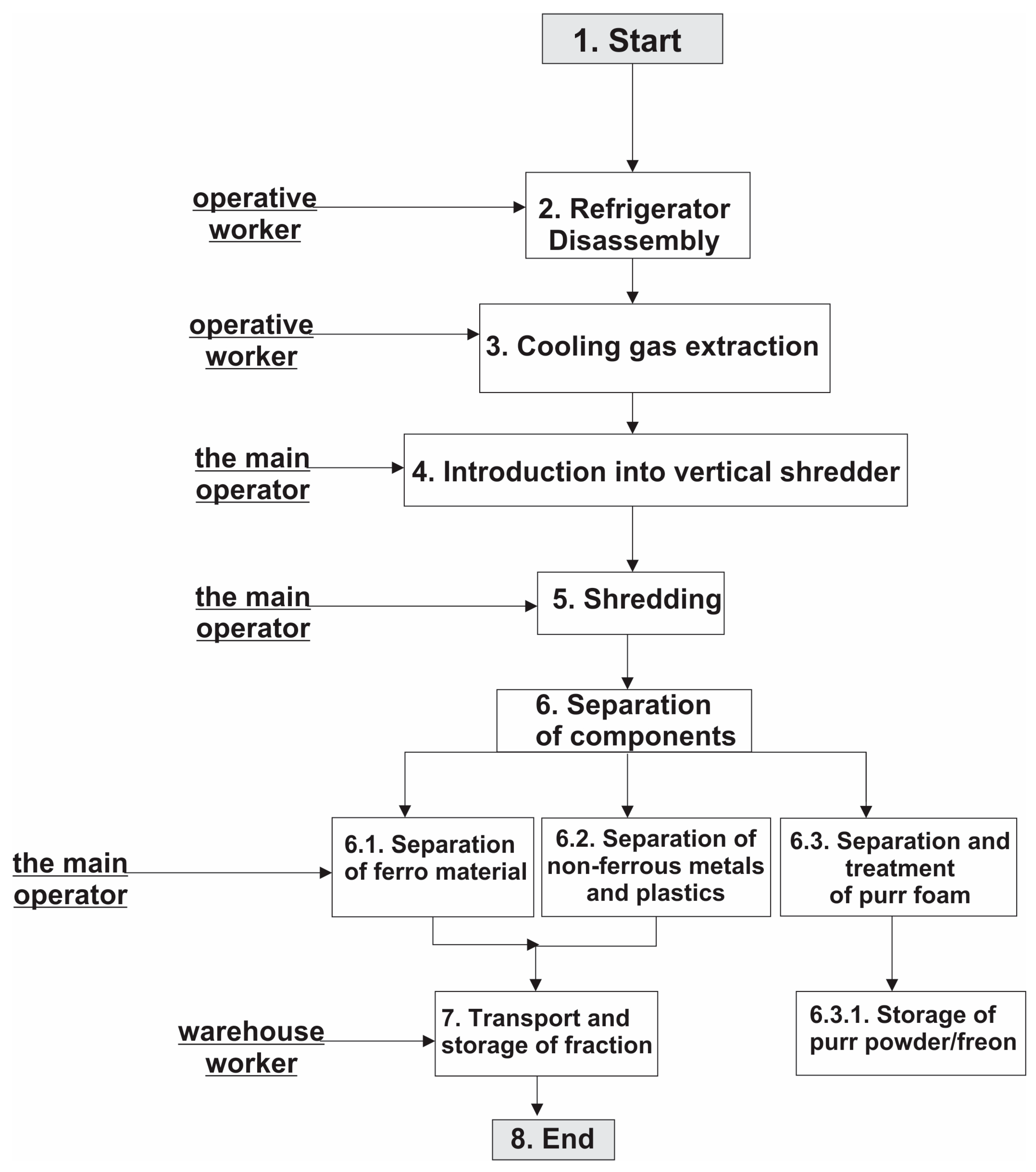
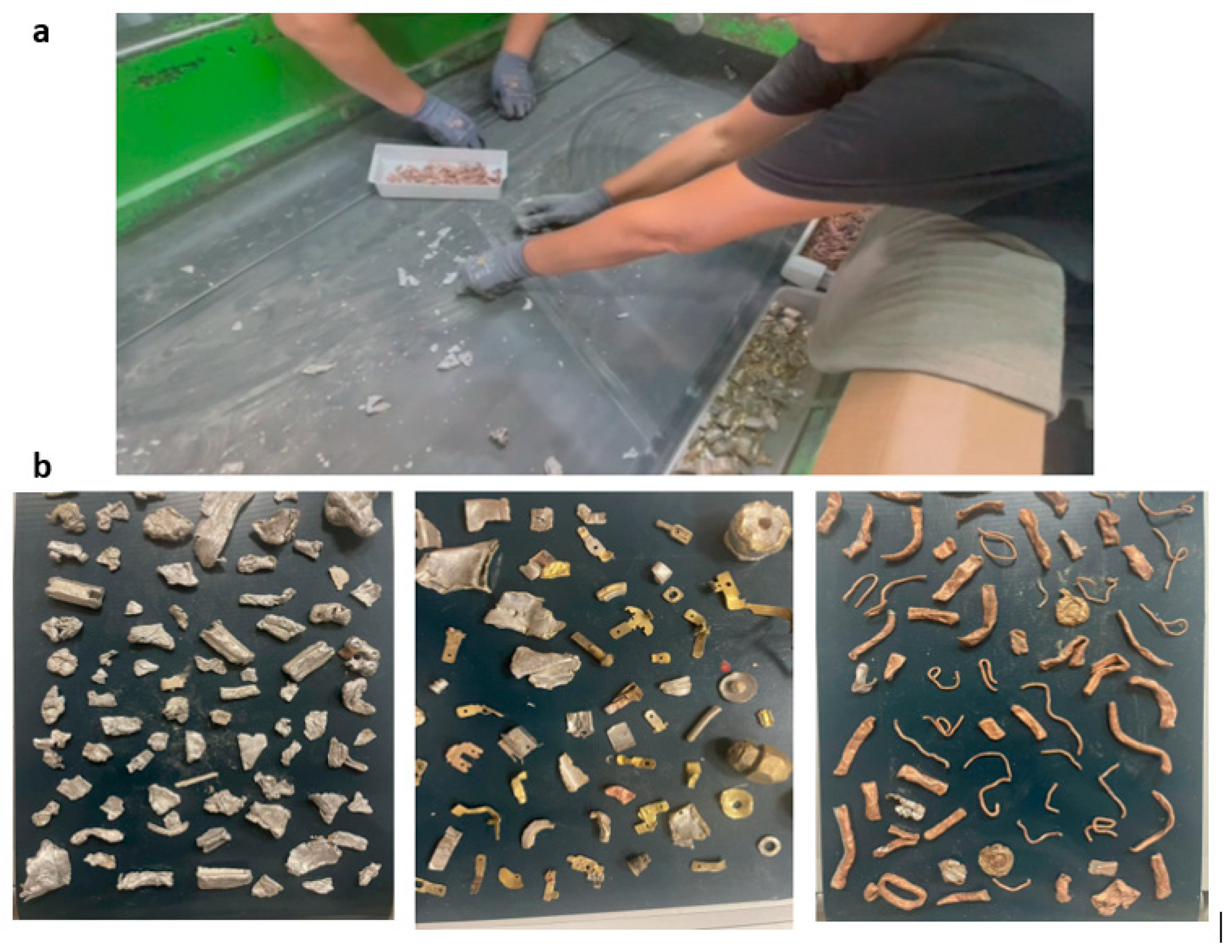
5.1. Description of the Refrigerator Recycling Procedure in the Recycling Facility “E-Reciklaža“
5.2. Identification of the Steps of the Recycling Process Suitable for Automation/Robotization
5.3. Technical Requirements Analysis and Proposed Solution
6. Conclusions
- Most often, automated processes or vision techniques and collaborative robots assist humans in disassembling electrical devices during recycling. There are not many examples that demonstrate the separation of shredded parts from e-waste. As it is not possible to create a universal e-waste recycling system due to the variety of types and forms of e-waste, the application of partial automation in the form of a flexible e-waste sorting station that would combine computer vision and collaborative robotic systems has great potential in recycling. This would make it possible to take advantage of artificial intelligence, robotic systems, and the cognitive abilities of experienced workers that cannot be transferred to a robotic system, while the flexibility of the cell would be reflected in being easily adaptable for the separation of different types of e-waste that is recycled.
- The existing practice of e-waste management in Serbia is at a modest level, and the collection of this waste is performed only sporadically through organized periodic collection actions by recyclers. We have not even come close to achieving the established national goals in terms of the e-waste recycling rate. The reason for this state of affairs is the inconsistency of domestic legislation with the European one, the lack of the necessary infrastructure for e-waste management at the local community and state level, as well as the insufficient environmental awareness of Serbian citizens.
- The possible use of robots in the e-waste separation process was looked at, using the recycling center “E-Reciklaža” as an example. The analysis was grounded on real requirements and data from production, based on which a potential robotized solution was proposed and discussed in terms of implementation and the benefits it would bring. It was concluded that using robots in recycling would greatly improve workplaces that currently rely on manual labor and require workers to stand in awkward positions or deal with potentially hazardous materials like trash. The increased efficiency would have positive effects on wages, while the reduced workload would benefit the workers from sociological, ergonomic, and health perspectives. Moreover, it was shown that the increased sorting performance and quality would bring significant economic benefit to the company, making it a sound investment which would also have a profoundly positive environmental impact. The introduction of robotics would be a significant contributor towards strengthening of the local recycling ecosystem and would therefore have a positive impact on increasing Serbia’s recycling rate.
- An insight into the gaps of the e-waste management system in Serbia with the proposal of potential solutions can help other countries in the region and beyond that face the same obstacles.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Waste Management Program of the Republic of Serbia for the Period 2022–2031. Available online: https://www.ekologija.gov.rs/sites/default/files/2022-03/program_upravljanja_otpadom_eng_-_adopted_version.pdf (accessed on 22 March 2024).
- Rulebook on the List of Electrical and Electronic Products, Measures for Prohibition and Restriction of the Use of Electrical and Electronic Equipment Containing Hazardous Substances, Method and Procedure for Waste Management of Electrical and Electronic Products (“Official Gazette of the Republic of Serbia”, No. 99/2010). Available online: https://www.paragraf.rs/propisi/pravilnik-listi-elektricnih-elektronskih-proizvoda-merama-zabrane-ogranicenja-koriscenja.html (accessed on 23 March 2024).
- Rulebook on Categories, Testing and Classification of Waste, (“Official Gazette of the Republic of Serbia”, No. 56/2010, 93/2019 i 39/2021). Available online: https://www.paragraf.rs/propisi/pravilnik-kategorijama-ispitivanju-klasifikaciji-otpada.html (accessed on 23 March 2024).
- Tsydenova, O.; Bengtsson, M. Chemical hazards associated with treatment of waste electrical and electronic equipment. Waste Manag. 2011, 31, 45–58. [Google Scholar] [CrossRef] [PubMed]
- The Law on Waste Management (“Official Gazette of the Republic of Serbia”, No. 36/2009, 88/2010, 14/2016, 95/2018—Other law and 35/2023). Available online: https://www.paragraf.rs/propisi/zakon_o_upravljanju_otpadom.html (accessed on 23 March 2024).
- Ramanayaka, S.; Keerthanan, S.; Vithanage, M. Urban Mining of E-Waste: Treasure Hunting for Precious Nanometals. Handbook of Electronic Waste Management, 1st ed.; Butterworth-Heinemann: Oxford, UK, 2020; Chapter 2; pp. 19–54. ISBN 978-0-12-817030-4. [Google Scholar]
- A New Circular Vision for Electronics: Time for a Global Reboot; World Economic Forum. Available online: https://www3.weforum.org/docs/WEF_A_New_Circular_Vision_for_Electronics.pdf (accessed on 25 March 2024).
- Shagun, A.K.; Arora, A. Proposed solution of e-waste management. Int. J. Future Comput. Commun. 2013, 2, 490–493. [Google Scholar] [CrossRef]
- Alvarez-de-los-Mozos, E.; Renteria, A. Collaborative robots in e-waste management. Procedia Manuf. 2017, 11, 55–62. [Google Scholar] [CrossRef]
- Forti, V.; Baldé, C.P.; Kuehr, R.; Bel, G. The Global E-Waste Monitor 2020: Quantities, Flows and the Circular Economy Potential; United Nations University (UNU)/United Nations Institute for Training and Research (UNITAR)—Co-hosted CYCLE Programme; International Telecommunication Union (ITU) & International Solid Waste Association (ISWA): Bonn, Germany; Geneva, Switzerland; Rotterdam, The Netherlands, 2020; ISBN 978-92-808-9114-0. [Google Scholar]
- Namias, J. The Future of Electronic Waste Recycling in the United States: Obstacles and Domestic Solutions; Columbia University: New York, NY, USA, 2013; Available online: https://allgreenrecycling.com/wp-content/uploads/2016/11/Namias_Thesis_07-08-1312.pdf (accessed on 1 April 2024).
- Shirodkar, N.; Terkar, R. Stepped recycling: The solution for E-waste management and sustainable manufacturing in India. Mater. Today Proc. 2017, 4, 8911–8917. [Google Scholar] [CrossRef]
- Municipal Solid Waste Management Manual. Central Public Health and Environmental Engineering Organisation, Ministry of Urban Development, Government of India. Available online: https://mohua.gov.in/upload/uploadfiles/files/Part2.pdf (accessed on 1 April 2024).
- Lu, W.; Chen, J. Computer vision for solid waste sorting: A critical review of academic research. Waste Manag. 2022, 142, 29–43. [Google Scholar] [CrossRef] [PubMed]
- Wills, B.A.; Barley, R.W. (Eds.) Mineral Processing at a Crossroads: Problems and Prospects; Springer: Berlin/Heidelberg, Germany, 2012; Volume 117. [Google Scholar]
- Knežević, D. Mineral Processing; Faculty of Mining and Geology, University of Belgrade: Belgrade, Serbia, 2012; pp. 157–167. [Google Scholar]
- Gundupalli, S.P.; Hait, S.; Thakur, A. A review on automated sorting of source-separated municipal solid waste for recycling. Waste Manag. 2017, 60, 56–74. [Google Scholar] [CrossRef]
- Trumić, M.; Trumić, M.; Bogdanović, G. Methods of plastic waste recycling with emphasis on mechanical treatment. Recycl. Sustain. Dev. 2012, 5, 39–52. [Google Scholar]
- Dodampegama, S.; Hou, L.; Asadi, E.; Zhang, G.; Setunge, S. Revolutionizing construction and demolition waste sorting: Insights from artificial intelligence and robotic applications. Resour. Conserv. Recycl. 2024, 202, 107375. [Google Scholar] [CrossRef]
- Safronova, N.B.; Gulnaz, I. Khaibrakhmanova. Innovative Design of Waste Processing Technologies. Serbian J. Manag. 2021, 16, 453–462. [Google Scholar] [CrossRef]
- Luu, T.-A.T.; Le, H.-M.; Vu, M.-Q.; Nguyen, B.-V. AI Application for Solid Waste Sorting in Global South. Available online: https://sdgs.un.org/sites/default/files/2023-05/A41%20-%20Thien-An%20Tran%20Luu%20-%20AI%20Application%20for%20Solid%20Waste%20in%20the%20global%20south.pdf (accessed on 2 April 2024).
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Aki, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. PLoS Med. 2021, 18, e1003583. [Google Scholar] [CrossRef]
- Kiyokawa, T.; Takamatsu, J.; Koyanaka, S. Challenges for Future Robotic Sorters of Mixed Industrial Waste: A Survey. IEEE Trans. Autom. Sci. Eng. 2022, 21, 1023–1040. [Google Scholar] [CrossRef]
- Merdan, M.; Lepuschitz, W.; Meurer, T.; Vincze, M. Towards ontology-based automated disassembly systems. In Proceedings of the IECON 2010—36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7 November 2010; pp. 1392–1397. [Google Scholar] [CrossRef]
- Bogue, R. Robots in Recycling and Disassembly. Industrial Robot. Int. J. Robot. Res. Appl. 2019, 46, 461–466. [Google Scholar] [CrossRef]
- Shahab, S.; Anjum, M.; Umar, M.S. Deep Learning Applications in Solid Waste Management: A deep literature review. Int. J. Adv. Comput. Sci. Appl. 2022, 13, 381–395. [Google Scholar] [CrossRef]
- Sharma, H.; Kumar, H.; Mangla, S.K. Enablers to computer vision technology for sustainable E-waste management. J. Clean. Prod. 2023, 412, 137396. [Google Scholar] [CrossRef]
- Deng, W.; Liu, Q.; Pham, D.T.; Hu, J.; Lam, K.M.; Wang, Y.; Zhou, Z. Predictive exposure control for vision-based robotic disassembly using deep learning and predictive learning. Robot. Comput.-Integr. Manuf. 2024, 85, 102619. [Google Scholar] [CrossRef]
- Nafiz, M.S.; Das, S.S.; Morol, M.K.; Al Juabir, A.; Nandi, D. Convowaste: An automatic waste segregation machine using deep learning. In Proceedings of the 3rd International Conference on Robotics, Electrical and Signal Processing Techniques (ICREST), American International University-Bangladesh, Dhaka, Bangladesh, 7–9 January 2023; pp. 181–186. [Google Scholar] [CrossRef]
- Ramadurai, S.; Jeong, H. Effect of human involvement on work performance and fluency in human-robot collaboration for recycling. In Proceedings of the 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Sapporo, Japan, 7–10 March 2022. [Google Scholar] [CrossRef]
- Chen, Y.; Luo, Y.; Yerebakan, M.O.; Xia, S.; Behdad, S.; Hu, B. Human workload and ergonomics during human-robot collaborative electronic waste disassembly. In Proceedings of the 3rd International Conference on Human-Machine Systems (ICHMS), Orlando, FL, USA, 17–19 November 2022. [Google Scholar] [CrossRef]
- Diedler, S.; Hobohm, J.; Batinic, B.; Kalverkamp, M.; Kuchta, K. WEEE data management in Germany and Serbia. Glob. Nest J. 2018, 20, 751–757. [Google Scholar] [CrossRef]
- Report on Special Waste Streams in the Republic of Serbia for 2022. Available online: http://www.sepa.gov.rs/download/Posebni_tokovi_2022.pdf (accessed on 3 April 2024).
- Local Waste Management Plan of the City of Belgrade 2021–2030. Available online: https://www.beograd.rs/images/file/b4b1aa1e6c2f3a2219a9c5e0f5f18a16_8185640472.pdf (accessed on 3 April 2024).
- Where to Recycle: Interactive Map. Available online: https://gdereciklirati.rs/# (accessed on 3 April 2014).
- Marinković, T.; Batinić, B.; Stanisavljević, N. Analysis of WEEE management in the Republic of Serbia. In Proceedings of the 47th Conference in the Field of Municipal and Industrial Wastewater, Municipal Solid Waste and Hazardous Waste, Pirot, Serbia, 5–7 April 2017. [Google Scholar]
- Report on Waste Management in the Republic of Serbia for the Period 2011–2022. Available online: http://www.sepa.gov.rs/download/Upravljanje_otpadom_2011-2022.pdf (accessed on 4 April 2024).
- European Parliament. E-Waste in the EU: Facts and Figures (Infographic). 2024. Available online: https://www.europarl.europa.eu/topics/en/article/20201208STO93325/e-waste-in-the-eu-facts-and-figures-infographic (accessed on 4 April 2024).
- Directive 2012/19/EU of the European Parliament and of the Council of 4 July 2012 on Waste Electrical and Electronic Equipment (WEEE) (Recast) Text with EEA Relevance. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=celex%3A32012L0019 (accessed on 4 April 2024).
- Obradović, L.; Bugarin, M.; Stevanović, Z.; Mikić, M.; Lekovski, R. Overview of Current Domestic Legislation in the Field of Waste Management and Disposal; Rudarski radovi 2010; Mining and Metallurgy Institute Bor: Bor, Serbia, 2010; pp. 93–106. [Google Scholar]
- Negotiations with the EU/Negotiation Clusters/Chapter 27, Environment. Available online: https://www.mei.gov.rs/srp/obuka/e-obuke/vodic-kroz-pregovore-srbije-i-evropske-unije/klasteri/klaster-4/poglavlje-27-zivotna-sredina/ (accessed on 4 April 2024).
- Mitić, L.; Pavlović, M.; Vujanović, N. Management, regulation and reporting mechanisms on electronic waste recycling in Serbia. Ecologica 2023, 30, 569–575. [Google Scholar] [CrossRef]
- Marinković, T.; Berežni, I.; Tošić, N.; Stanisavljević, N.; Batinić, B. Challenges in applying extended producer responsibility policies in developing countries: A case study in e-waste management in Serbia. In Proceedings of the 9th International Conference on Sustainable Solid Waste Management, Corfu, Greece, 15–18 June 2022. [Google Scholar]
- Marinković, T.; Berežni, I.; Tošić, N.; Stanisavljević, N.; Batinić, B. Optimization of WEEE collection system: Assessment of key influencing factors for different scenarios in Novi Sad, Serbia. In Proceedings of the 10th International Conference on Sustainable Solid Waste Management, Chania, Crete, Greece, 21–23 June 2023. [Google Scholar]
- Analysis of the Current System of Waste Electrical and Electronic Equipment Management in the Republic of Serbia. Available online: https://naled.rs/htdocs/Files/01854/Analiza-stanja-upravljanja-elektricnim-i-elektronskim-otpadom-u-Republici-Srbiji.pdf (accessed on 4 April 2024).
- Register of Operators Licensed to Manage E-Waste. Available online: http://www.sepa.gov.rs/index.php?menu=20174&id=20055&akcija=ShowExternal (accessed on 5 April 2014).
- Nedić, B. Models of collecting e-waste. In Proceedings of the 7th National Conference on the Quality of the Life, Kragujevac, Serbia, 7–9 June 2012. [Google Scholar]
- Sovilj-Nikić, S.; Savković, T.R.; Kovač, P.P.; Sovilj, B. Recycling of electronic and electrical equipment and introduction in national legislation of Serbia. In Proceedings of the 13th International Research/Expert Conference “Trends in the Development of Machinery and Associated Technology”, Hammamet, Tunisia, 16–21 October 2009. [Google Scholar]
- Mitić, L. Monitoring of E-Waste Recycling Data. In Sinteza 2021—International Scientific Conference on Information Technology and Data Related Research; Singidunum University: Belgrade, Serbia, 2021; pp. 296–300. [Google Scholar] [CrossRef]
- Minić, V.L.; Jovanović, M.M. Environmental education and education in younger grades of primary school. Proc. Fac. Philos. Priština 2019, 49, 125–144. (In Serbian) [Google Scholar] [CrossRef]
- UpPet Project. This Project has Received funding from the European Union’s Horizon 2020 Research and Innovation Programme under Grant Agreement No 953214. Available online: https://uppet.eu/ (accessed on 5 May 2024).
- Nisic, D.; Knezevic, D.; Petkovic, A.; Ignjatovic, M.; Kostadinovic, J. Study of general environmental awareness of the urban population. In Proceedings of the 4th Human and Social Sciences at the Common Conference, Online, 3–7 October 2016; University of Zilina: Zilina, Slovakia, 2016. [Google Scholar]
- Dimić, V.; Milošević, M.; Milošević, A. Developing awareness about e-waste management in information technology. In Proceedings of the 4th International Scientific Conference Agribusiness MAK—2017 “EUROPEAN ROAD“ IPARD 2015–2020, Kopaonik, Serbia, 27–28 January 2017; pp. 321–329. [Google Scholar]
- Vučković, D. A Model for Sustainable Electrical and Electronic Waste Management in Serbia; Faculty of Economics and Engineering Management in Novi Sad, University Business Academy in Novi Sad: Novi Sad, Serbia, 2019. (In Serbian) [Google Scholar]
- Decision on Establishing the National Environmental Protection Program. Available online: https://www.ekologija.gov.rs/sites/default/files/2021-01/nacionalni-program-zastite-zivotne-sredine-r.srbija.pdf (accessed on 5 May 2024).
- Gundupalli Paulraj, S.; Hait, S.; Thakur, A. Automated Municipal Solid Waste Sorting for Recycling Using a Mobile Manipulator. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Charlotte, NC, USA, 21–24 August 2016; American Society of Mechanical Engineers: Charlotte, NC, USA, 2016; Volume 5A. [Google Scholar] [CrossRef]
- Brazier, J.P.; Prasetyo, J. Robotic Solution for the Automation of E-waste Recycling. J. Appl. Sci. Adv. Eng. 2023, 1, 11–17. [Google Scholar] [CrossRef]
- Álvarez-de-los-Mozos, E.; Rentería-Bilbao, A.; Díaz-Martín, F. WEEE recycling and circular economy assisted by collaborative robots. Appl. Sci. 2020, 10, 4800. [Google Scholar] [CrossRef]
- E-reciklaža. About Us. Available online: https://www.ereciklaza.com/ (accessed on 5 June 2024).
- E-reciklaža. Machine Recycling of Refrigerators and E-Waste, Unpublished internal company document; E-reciklaža: Niš, Sebia, 2010. [Google Scholar]
- Sterkens, W.; Diaz-Romero, D.; Goedemé, T.; Dewulf, W.; Peeters, J.R. Detection and recognition of batteries on X-Ray images of waste electrical and electronic equipment using deep learning. Resour. Conserv. Recycl. 2021, 168, 105246. [Google Scholar] [CrossRef]
- Neelakandan, S.; Prakash, M.; Geetha, B.T.; Nanda, A.K.; Metwally, A.M.; Santhamoorthy, M.; Gupta, M.S. Metaheuristics with Deep Transfer Learning Enabled Detection and classification model for industrial waste management. Chemosphere 2022, 308, 136046. [Google Scholar] [CrossRef] [PubMed]
- NACHI-FUJIKOSHICORP Standard Cycle Time Explanation. Available online: https://www.nachi-fujikoshi.co.jp/eng/mz07/fastest02.html (accessed on 3 June 2024).
- Decision on the Amount of the Minimum Labor Price for the Period January–December 2024 (“Official Gazette of the Republic of Serbia”, No. 79/2023). Available online: http://demo.paragraf.rs/demo/combined/Old/t/t2023_09/SG_079_2023_003.htm (accessed on 22 June 2024).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Country of the First Author | Insights |
|---|---|---|
| 1. Kiyokawa et al., 2022 [23] | Japan |
|
| 2. Merdan et al., 2010 [24] | Austria |
|
| 3. Bogue, 2019 [25] | United Kingdom |
|
| 4. Alvarez-de-los-Mozos and Renteria, 2017 [9] | Spain |
|
| 5. Shahab et al., 2022 [26] | Saudi Arabia |
|
| 6. Sharma et al., 2023 [27] | India |
|
| 7. Deng et al., 2024 [28] | China |
|
| 8. Nafiz et al., 2023 [29] | Bangladesh |
|
| 9. Ramadurai et al., 2022 [30] | Chicago, USA |
|
| 10. Chen et al., 2022 [31] | Florida, USA |
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nišić, D.; Lukić, B.; Gordić, Z.; Pantelić, U.; Vukićević, A. E-Waste Management in Serbia, Focusing on the Possibility of Applying Automated Separation Using Robots. Appl. Sci. 2024, 14, 5685. https://doi.org/10.3390/app14135685
Nišić D, Lukić B, Gordić Z, Pantelić U, Vukićević A. E-Waste Management in Serbia, Focusing on the Possibility of Applying Automated Separation Using Robots. Applied Sciences. 2024; 14(13):5685. https://doi.org/10.3390/app14135685
Chicago/Turabian StyleNišić, Dragana, Branko Lukić, Zaviša Gordić, Uroš Pantelić, and Arso Vukićević. 2024. "E-Waste Management in Serbia, Focusing on the Possibility of Applying Automated Separation Using Robots" Applied Sciences 14, no. 13: 5685. https://doi.org/10.3390/app14135685