
Location Selection Methods for Urban Terminal Co-Distribution Centers with Air–Land Collaboration


Abstract
1. Introduction
2. State of the Art
3. Modeling
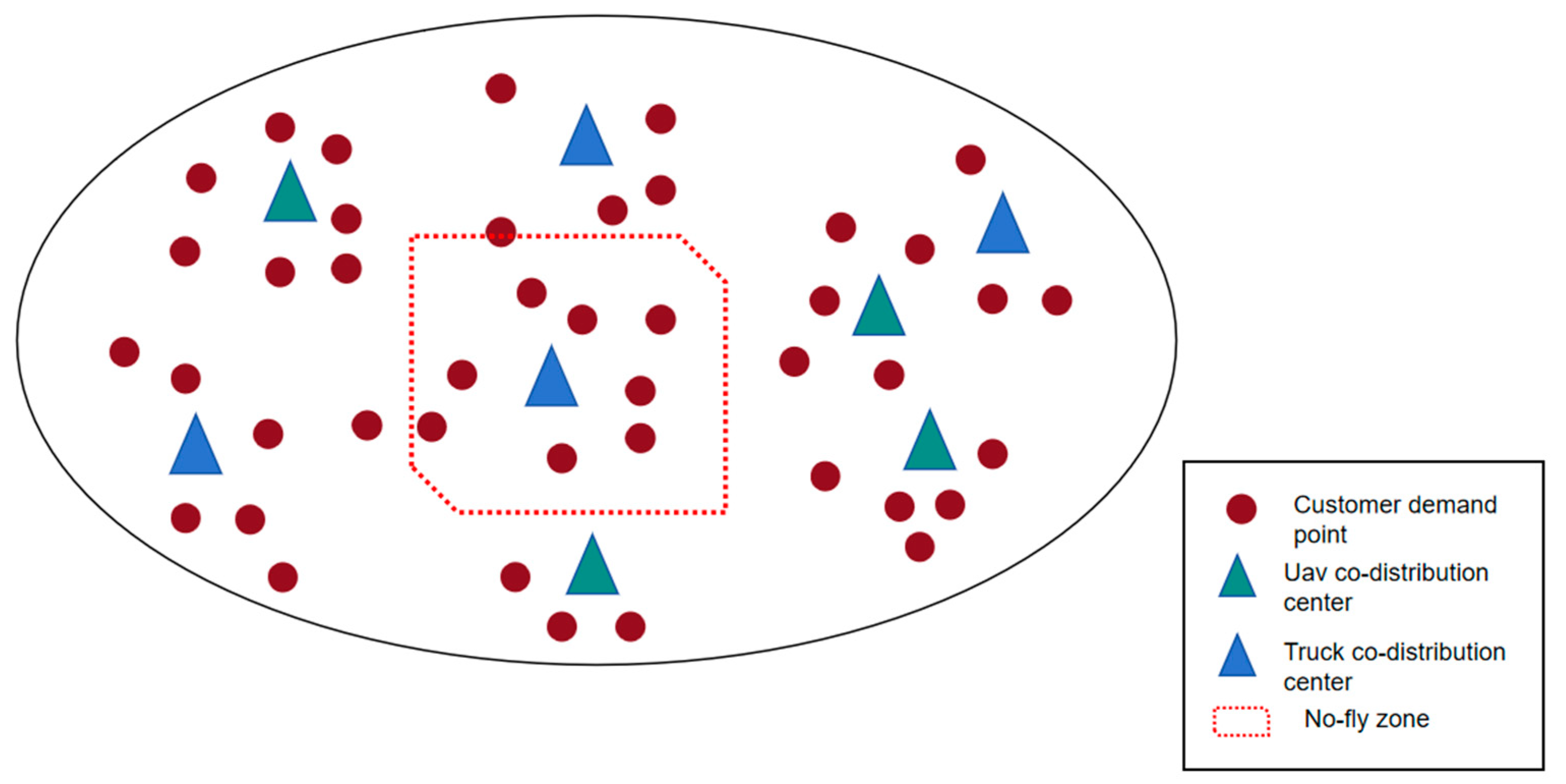
3.1. Problem Description
3.2. Assumptions
- The information of all customer demand points is known.
- After the number and location of the co-distribution centers are determined, the UAV distribution flight routes and vehicle travel routes are fixed. All routes start from a co-distribution center and return to the center after completing the customer distribution service.
- The distribution capacity of the two types of co-distribution centers is fixed.
- The cost of UAVs is mainly considered in the flight process, not in the hovering state.
- Sufficient energy (fuel) is maintained during the transportation of both UAVs and vehicles, without considering the time required for UAVs to take off, land, recharge and change the power source, and load and unload cargo.
- UAVs and vehicles fly and travel at a uniform speed.
3.3. Notation
3.4. Model Construction
4. Algorithm Design
4.1. Construction of a Co-Distribution Center Preselection Set Based on K-Means Clustering
4.2. Co-Distribution Center Site Selection Method Based on GWO
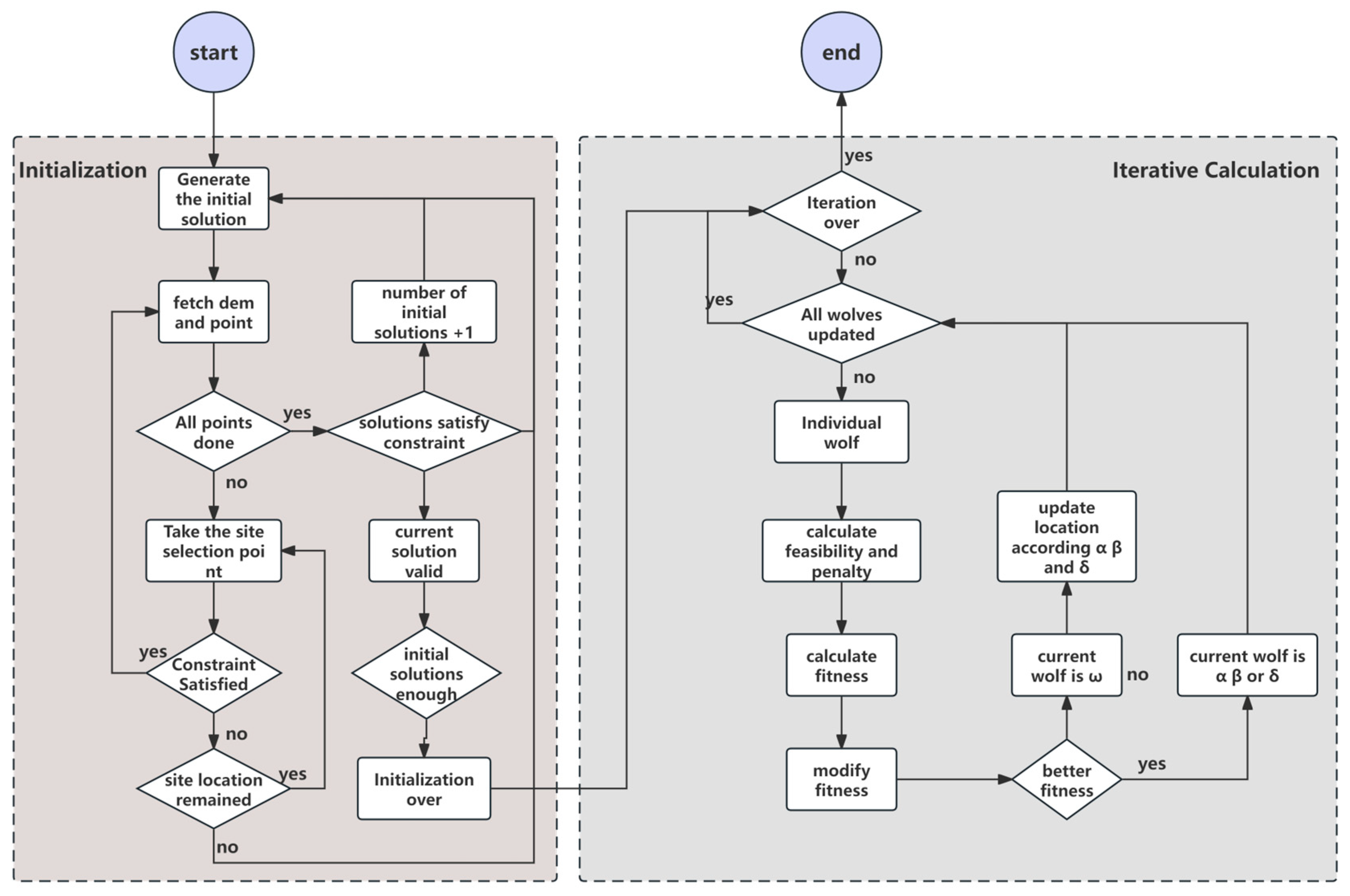
4.2.1. Algorithm Flow
4.2.2. Processing of Site Selection Data
4.2.3. Initialization Strategies for Wolf Packs
4.2.4. Design of the Fitness Function
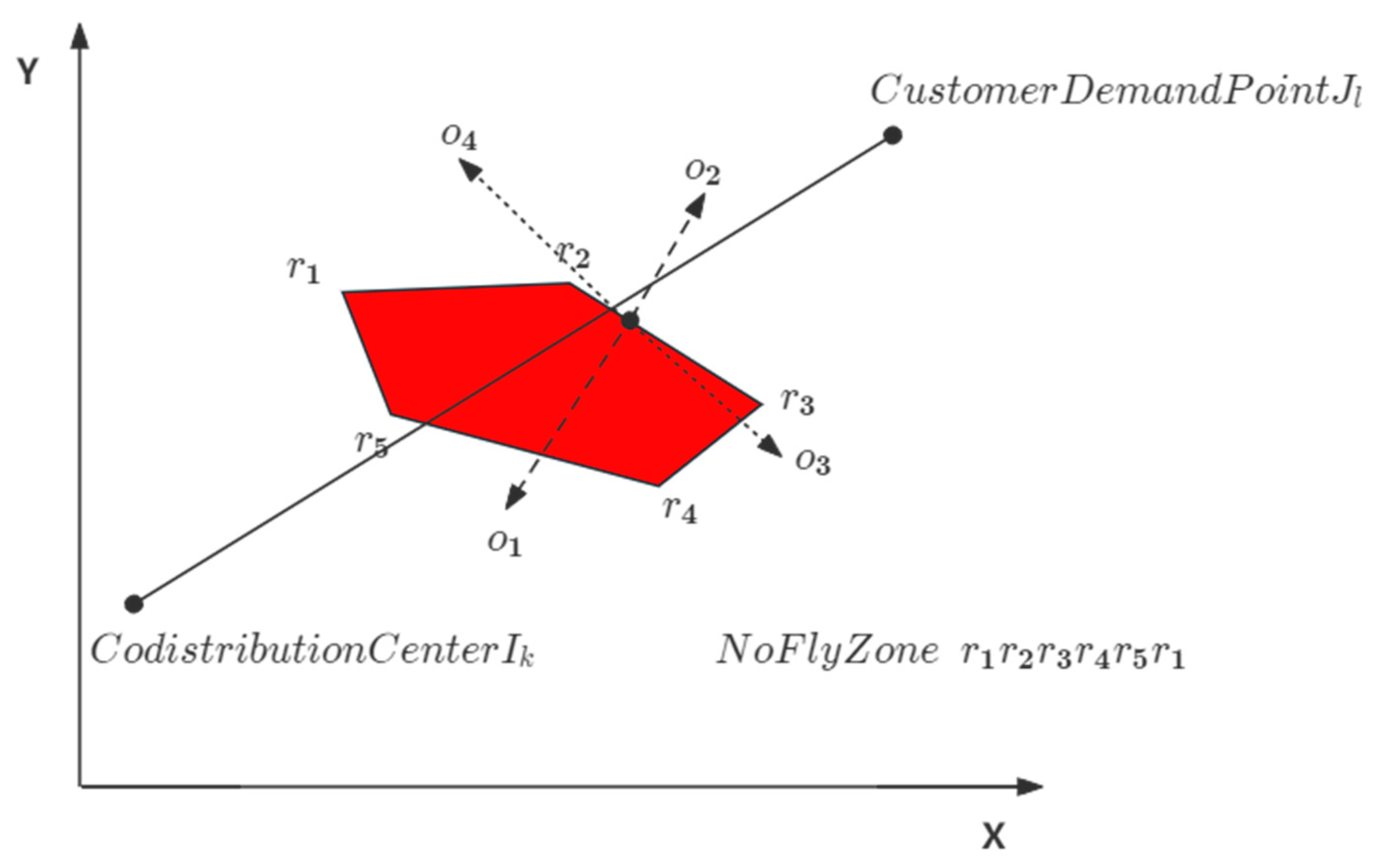
4.2.5. No-Fly-Zone Handling
5. Analysis
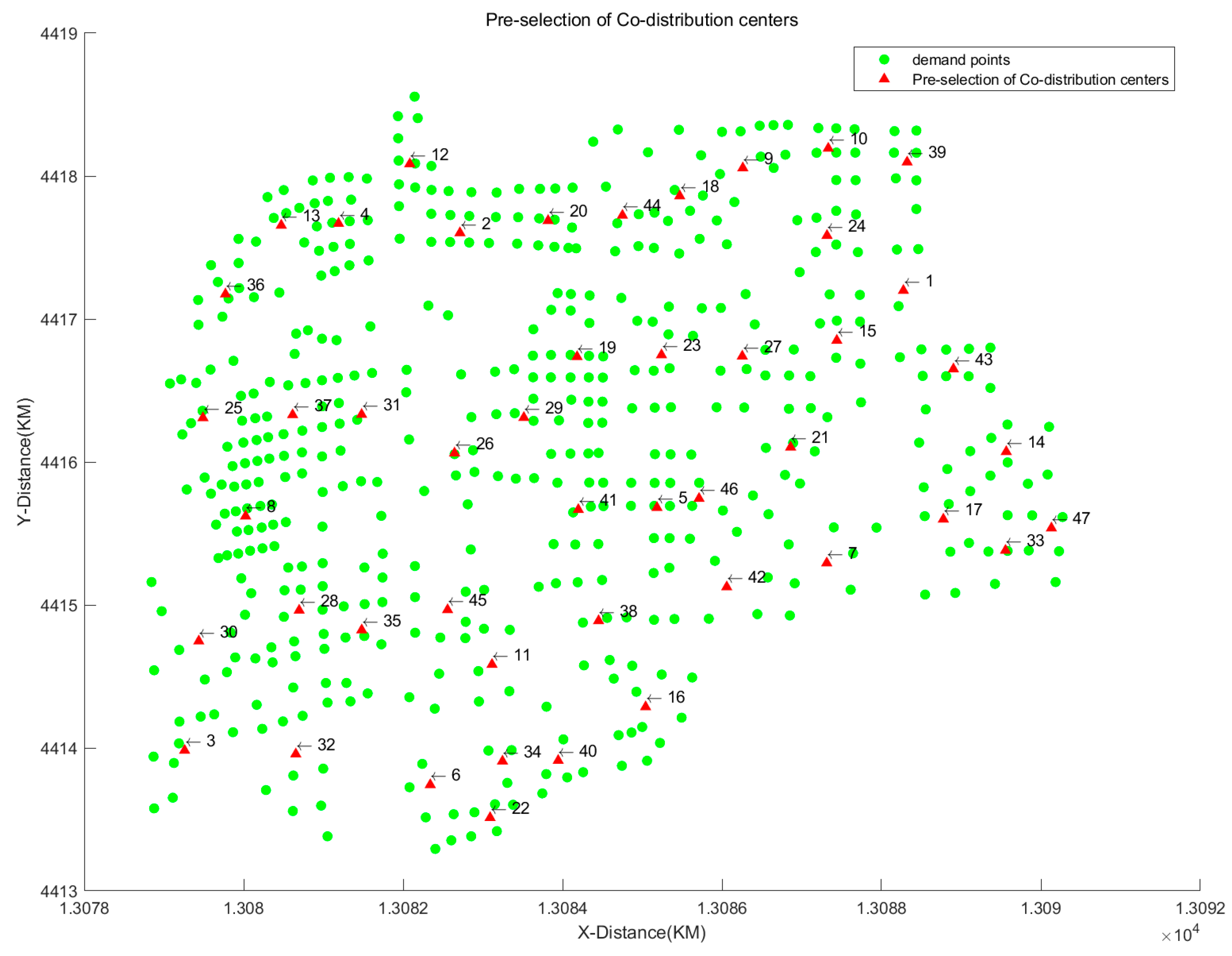
5.1. Preselected Set Construction
5.2. Model Parameters
5.3. Solution Results of GWO
5.4. Comparison of Algorithm Performance
5.5. Operational Effectiveness of the Air–Ground Cooperative Co-Distribution Network
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Available online: http://www.caac.gov.cn/HDJL/YJZJ/202208/P020220822615871900321.pdf (accessed on 1 June 2024).
- Özmen, M.; Aydoğan, E.K. Robust multi-criteria decision making methodology for real life logistics center location problem. Artif. Intell. Rev. 2020, 53, 725–751. [Google Scholar] [CrossRef]
- Mousavi, S.M.; Antuchevičienė, J.; Zavadskas, E.K.; Vahdani, B.; Hashemi, H. A new decision model for cross-docking center location in logistics networks under interval-valued intuitionistic fuzzy uncertainty. Transport 2019, 34, 30–40. [Google Scholar] [CrossRef]
- Ji, Y.; Bei, B.; Chu, H.; Cheng, F. Optimization research of terminal distribution network of express enterprise based on two-stage algorithm. Syst. Eng. 2019, 37, 100–105. [Google Scholar]
- Cui, D. Research on the Construction of the Terminal Common Distribution Network of Express Delivery Enterprises. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2019. [Google Scholar]
- Bi, K. Research on Location of Collaborative Distribution Service Station for Urban Terminal Express Delivery Based on Crowdsourcing. Master’s Thesis, Beijing University of Posts and Telecommunications, Beijing, China, 2021. [Google Scholar]
- Shavarani, S.M.; Nejad, M.G.; Rismanchian, F.; Izbirak, G. Application of hierarchical facility location problem for optimization of a drone delivery system: A case study of Amazon prime air in the city of San Francisco. Int. J. Adv. Manuf. Technol. 2018, 95, 3141–3153. [Google Scholar] [CrossRef]
- Venkatesh, N.; Payan, A.P.; Justin, C.Y.; Kee, E.; Mavris, D. Optimal siting of sub-urban air mobility (suam) ground architectures using network flow formulation. In Proceedings of the AIAA AVIATION 2020 FORUM, Virtual, 15–19 June 2020; p. 2921. [Google Scholar]
- German, B.; Daskilewicz, M.; Hamilton, T.K.; Warren, M.M. Cargo delivery by passenger EVTOL aircraft: A case study in the San Francisco bay area. In Proceedings of the AIAA Aerospace Sciences Meeting, San Francisco, CA, USA, 8 January 2018. [Google Scholar]
- Ren, X.; Wang, L.; Wang, J. Automatic Vertiport Location of Unmanned Aerial Vehicle Based on Partition Optimization. Oper. Res. Manag. Sci. 2023, 32, 20–26. [Google Scholar]
- Lu, L.; Hu, Z. Island UAV Delivery Relay Station Siting-Path Optimization. J. Dalian Univ. Technol. 2022, 62, 299–306. [Google Scholar]
- Qian, X.; Zhang, H.; Zhang, F. Research on site selection and allocation of landing sites for end-of-line distribution logistics UAVs. J. Wuhan Univ. Technol. (Transp. Sci. Eng.) 2021, 45, 682–693. [Google Scholar]
- Feng, D. Research on the Layout Planning Method of Urban Logistics UAV Vertiports. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2022. [Google Scholar]
- Borghetti, F.; Caballini, C.; Carboni, A.; Grossato, G.; Maja, R.; Barabino, B. The use of drones for last-mile delivery: A numerical case study in Milan, Italy. Sustainability 2022, 14, 1766. [Google Scholar] [CrossRef]
- Sharma, I.; Kumar, V.; Sharma, S. A comprehensive survey on grey wolf optimization. Recent Adv. Comput. Sci. Commun. (Former. Recent Pat. Comput. Sci.) 2022, 15, 323–333. [Google Scholar]
- Kumar, A.; Pant, S.; Ram, M. Gray wolf optimizer approach to the reliability-cost optimization of residual heat removal system of a nuclear power plant safety system. Qual. Reliab. Eng. Int. 2019, 35, 2228–2239. [Google Scholar] [CrossRef]
- El Gayyar, M.; Emary, E.; Sweilam, N.H.; Abdelazeem, M. A hybrid Grey Wolf-bat algorithm for global optimization. In Proceedings of the International Conference on Advanced Machine Learning Technologies and Applications, Cairo, Egypt, 22–24 February 2018; Springer: Cham, Switzerland, 2018; pp. 3–12. [Google Scholar]
- Fouad, M.M.; Hafez, A.I.; Hassanien, A.E.; Vaclav, S. Grey wolves optimizer-based localization approach in WSNs. In Proceedings of the 2015 11th International Computer Engineering Conference (ICENCO), Cairo, Egypt, 29–30 December 2015; pp. 256–260. [Google Scholar]
- Long, W.; Wu, T.; Cai, S.; Liang, X.; Jiao, J.; Xu, M. A novel grey wolf optimizer algorithm with refraction learning. IEEE Access 2019, 7, 57805–57819. [Google Scholar] [CrossRef]
- Mittal, N.; Singh, U.; Sohi, B.S. Modified grey wolf optimizer for global engineering optimization. Appl. Comput. Intell. Soft Comput. 2016, 2016, 7950348. [Google Scholar] [CrossRef]
- Zhang, S.; Zhou, Y.; Li, Z.; Pan, W. Grey wolf optimizer for unmanned combat aerial vehicle path planning. Adv. Eng. Softw. 2016, 99, 121–136. [Google Scholar] [CrossRef]
- Sujatha, K.; Shalini Punithavathani, D. Optimized ensemble decision-based multi-focus imagefusion using binary genetic Grey-Wolf optimizer in camera sensor networks. Multimed. Tools Appl. 2018, 77, 1735–1759. [Google Scholar] [CrossRef]
- King, L.J. Central Place Theory; West Virginia University: Morgantown, WV, USA, 2020. [Google Scholar]
- Su, W. Research on the Layout Planning of Express Terminal Joint Distribution Network. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2024. [Google Scholar]
- Ahmed, M.; Seraj, R.; Islam, S.M.S. The k-means algorithm: A comprehensive survey and performance evaluation. Electronics 2020, 9, 1295. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Nagargoje, A.; Kankar, P.K.; Jain, P.K.; Tandon, P. Performance evaluation of the data clustering techniques and cluster validity indices for efficient toolpath development for incremental sheet forming. J. Comput. Inf. Sci. Eng. 2021, 21, 031001. [Google Scholar] [CrossRef]
- Jain, M.; Saihjpal, V.; Singh, N.; Singh, S.B. An overview of variants and advancements of PSO algorithm. Appl. Sci. 2022, 12, 8392. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol Type | Notation Expression | Meaning |
|---|---|---|
| Collections | I = {1, 2, 3,……n} | Collection of an alternative co-distribution center |
| J = {1, 2, 3,……m} | Collection of customer demand points | |
| S = {1, 2} | Categorized collection of co-distribution centers | |
| U = {1, 2, 3,……u} | Collection of UAVs | |
| K{1, 2, 3,……k} | Collection of vehicles | |
| Subscripts | i ∈ I | Subscript of alternative co-distribution centers |
| j ∈ J | Subscript of customer demand points | |
| s ∈ S | Subscript of co-distribution center types | |
| u ∈ U | Subscript of UAVs | |
| k ∈ K | Subscript of vehicles | |
| Parameters | α | Time function weights |
| β | Cost function weights | |
| hj | Distribution demand at demand point j | |
| Es | Service capacity of the co-distribution centers | |
| Qu | Maximum load capacity of the UAV (kg) | |
| quij | Single-delivery capacity of the UAV (kg) | |
| Qk | Maximum load capacity of the vehicle (kg) | |
| qkij | Single-delivery capacity of the vehicle (kg) | |
| Ru | Maximum service distance of UAV co-distribution centers (km) | |
| Rk | Maximum service distance of vehicle co-distribution centers (km) | |
| Du | Maximum range of the UAV (km) | |
| Dk | Maximum range of the vehicle (km) | |
| vu | Average delivery speed of the UAV (km/h) | |
| vk | Average delivery speed of the vehicle (km/h) | |
| Cs | Construction cost of the co-distribution center (CNY) | |
| duij | Flight distance of the UAV from co-distribution center i to customer demand point j (km) | |
| dkij | Distance of the vehicle from co-distribution center i to customer demand point j (km) | |
| Cuv | Distribution and operating costs of the UAV co-distribution center (CNY/pc) | |
| Ckv | Distribution and operating costs of the UAV co-distribution center (CNY/pc) | |
| Variants | xis | Whether the alternative landing site i is to be constructed as an s-type co-distribution center, with a value of 1 for yes and 0 for no |
| yuij | Whether customer demand point j is delivered by UAV co-distribution point i, with a value of 1 for yes and 0 for no | |
| ykij | Whether customer demand point j is delivered by vehicle co-distribution point i, with a value of 1 for yes and 0 for no | |
| Aij | Whether the distribution path between UAV co-distribution point i and customer demand point j crosses the no-fly zone, with a value of 1 for no and 0 for yes |
| Initialization: 1. Initialize the size of the gray wolf pack, N (i.e., the number of solutions). 2. Randomly initialize the position of each gray wolf , where each position represents a potential site solution. 3. Initialize , , and as the best three solutions in the population. 4. Set the maximum number of iterations as MaxIteration and the current iteration as iter = 0. |
| Iteration starts: While iter < MaxIteration do for each wolf i in Pack do
9. Check for new , , and 10. Update the coefficients a, A, and C, which control the search behavior of the wolves, decreasing as the iteration proceeds 11. iter = iter + 1 end while |
| Output: Location of as the best siting option. |
| Point | Demand | Point | Demand | Point | Demand | Point | Demand | Point | Demand |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 278 | 21 | 584 | 41 | 1218 | 61 | 1529 | 81 | 1047 |
| 2 | 541 | 22 | 152 | 42 | 324 | 62 | 445 | 82 | 1044 |
| 3 | 358 | 23 | 229 | 43 | 404 | 63 | 254 | 83 | 669 |
| 4 | 494 | 24 | 327 | 44 | 348 | 64 | 1333 | 84 | 1450 |
| 5 | 222 | 25 | 697 | 45 | 578 | 65 | 319 | 85 | 518 |
| 6 | 187 | 26 | 195 | 46 | 194 | 66 | 842 | 86 | 746 |
| 7 | 495 | 27 | 1417 | 47 | 636 | 67 | 1058 | 87 | 725 |
| 8 | 179 | 28 | 885 | 48 | 1062 | 68 | 222 | 88 | 1574 |
| 9 | 387 | 29 | 1206 | 49 | 2860 | 69 | 910 | 89 | 844 |
| 10 | 846 | 30 | 1180 | 50 | 2394 | 70 | 729 | 90 | 1305 |
| 11 | 1072 | 31 | 401 | 51 | 749 | 71 | 722 | 91 | 727 |
| 12 | 892 | 32 | 658 | 52 | 1075 | 72 | 1232 | 92 | 852 |
| 13 | 476 | 33 | 353 | 53 | 451 | 73 | 529 | 93 | 1316 |
| 14 | 581 | 34 | 518 | 54 | 721 | 74 | 312 | 94 | 483 |
| 15 | 137 | 35 | 338 | 55 | 746 | 75 | 291 | 95 | 449 |
| 16 | 624 | 36 | 195 | 56 | 868 | 76 | 668 | 96 | 526 |
| 17 | 2787 | 37 | 961 | 57 | 1695 | 77 | 548 | 97 | 1645 |
| 18 | 292 | 38 | 231 | 58 | 1175 | 78 | 663 | 98 | 287 |
| 19 | 874 | 39 | 293 | 59 | 433 | 79 | 942 | 99 | 327 |
| 20 | 634 | 40 | 411 | 60 | 3276 | 80 | 444 | 100 | 567 |
| K | CP | SP | DB | DVI |
|---|---|---|---|---|
| 14 | 27.4086 | 1.1806 | 0.7883 | 0.0631 |
| 16 | 24.2683 | 1.1166 | 0.8294 | 0.0647 |
| 19 | 7.2490 | 1.0756 | 0.8364 | 0.0545 |
| 23 | 9.6046 | 0.8206 | 0.8656 | 0.0701 |
| 29 | 12.6379 | 0.7496 | 0.8308 | 0.0772 |
| 36 | 6.0788 | 0.5983 | 0.8823 | 0.0711 |
| 47 | 1.2362 | 0.4249 | 0.8446 | 0.1018 |
| Parameter | Meaning | Initial Value | Parameter | Meaning | Initial Value |
|---|---|---|---|---|---|
| Es1 | UAV co-distribution center capacity | 10,000 | Qu | Maximum load capacity of the UAV (kg) | 20 |
| Es2 | Vehicle co-distribution center capacity | 15,000 | Qk | Maximum load capacity of the vehicle (kg) | 200 |
| Du | Maximum range of the UAV (km) | 20 | Dk | Maximum range of the vehicle (km) | 50 |
| tu | Average delivery speed of the UAV (km/h) | 20 | tk | Average delivery speed of the vehicle (km/h) | 10 |
| C1 | Construction cost of the UAV co-distribution center (104 CNY) | 12 | C2 | Construction cost of the vehicle co-distribution center (104 CNY) | 7 |
| Cut1 | Unit distribution cost of UAVs (CNY/pc) | 0.84 | Ckt2 | Unit distribution cost of vehicles (CNY/pc) | 0.62 |
| MaxIteration | Maximum number of iterations of gray wolf optimization | 500 | N | Wolf pack size of gray wolf optimization | 30 |
| Number of Selected Points | Type of Co-Distribution Center | Corresponding Set of Demand Points |
|---|---|---|
| 2 | Vehicle | 12, 14, 24, 28, 32, 37, 39, 40, 41, 43, 45, 55, 62, 63, 65, 70, 71, 72, 75, 76, 78, 83, 94, 95 |
| 3 | Vehicle | 102, 108, 111, 127, 145, 183, 209, 212, 218, 221, 223, 225, 226, 243, 265, 268, 348 |
| 4 | Vehicle | 279, 280, 301, 302, 327, 328, 329, 331, 334, 346, 367, 368 |
| 7 | Vehicle | 378, 397, 398, 399, 413, 419, 427, 430, 455, 456, 466, 467, 468, 472, 473, 482, 484, 486, 488, 489 |
| 8 | UAV | 320, 343, 349, 360, 365, 369, 370, 371, 373, 377, 380, 402, 405, 415, 438 |
| 9 | Vehicle | 89, 101, 116, 117, 128, 137, 154, 162 |
| 10 | Vehicle | 113, 140, 141, 142, 170, 171, 172, 204, 219, 229, 257, 263, 264, 304, 335 |
| 14 | UAV | 107, 135, 184, 199, 205, 210, 238, 250, 255, 256, 267, 285, 287, 288, 289, 298, 311 |
| 15 | UAV | 342, 355, 374, 375, 376, 379, 382, 388, 391, 406, 409, 410, 411, 425, 428, 432, 433, 434, 435, 445, 451, 453, 454, 459 |
| 16 | UAV | 251, 254, 261, 266, 269, 286, 290, 291, 297, 299, 300, 308, 309, 310, 325, 336, 339, 340 |
| 17 | UAV | 259, 270, 271, 292, 293, 313, 317, 318, 322, 323, 341, 351, 352, 354, 358 |
| 18 | UAV | 67, 86, 88, 91, 93, 114, 118, 120, 121, 146, 147, 163, 196 |
| 19 | Vehicle | 400, 401, 431, 457, 458, 469, 470, 477, 479 |
| 20 | UAV | 149, 173, 174, 175, 190, 191, 192, 230, 233, 234, 235, 236 |
| 22 | UAV | 364, 394, 395, 396, 408, 418, 422, 423, 429, 440, 442, 443, 446, 449, 463, 464, 465, 475, 490, 491, 492 |
| 24 | UAV | 103, 104, 106, 119, 122, 125, 129, 130, 132, 134, 136, 138, 148, 153, 156, 157, 159, 161, 165, 166, 167, 169, 179, 186, 188, 189, 201, 213, 214, 216, 217, 239, 241, 246, 248, 258, 260 |
| 25 | UAV | 252, 253, 262, 272, 273, 274, 281, 294, 295, 296, 315, 316, 319, 321, 324, 347, 353 |
| 26 | UAV | 98, 99, 109, 115, 126, 131, 133, 164, 180, 187, 198, 203, 206, 207, 220, 222, 231, 237, 249 |
| 27 | UAV | 22, 25, 26, 33, 34, 35, 36, 38, 51, 59, 64, 66, 68, 69, 90, 92 |
| 28 | Vehicle | 1, 2, 4, 5, 6, 7, 9, 10, 11, 13, 15, 18, 20, 21, 27, 29, 30, 31, 42, 50, 87 |
| 29 | Vehicle | 105, 110, 112, 139, 144, 155, 160, 168, 185, 200, 202, 215, 224, 242, 247, 303 |
| 30 | Vehicle | 3, 8, 16, 17, 19, 23, 44, 46, 47, 48, 52, 53, 54, 56, 73, 80, 81, 82, 96 |
| 31 | UAV | 361, 362, 363, 381, 383, 384, 386, 387, 390, 392, 393, 407, 414, 416, 417, 420, 421, 444, 447, 448, 450, 452, 460, 478, 481 |
| 33 | Vehicle | 49, 57, 58, 60, 61, 74, 77, 79, 84, 85, 100 |
| 36 | Vehicle | 158, 181, 208, 211, 240, 244, 276, 277, 278, 306, 307, 332, 333, 344, 345, 366 |
| 38 | UAV | 385, 389, 403, 404, 412, 424, 426, 436, 437, 439, 441, 461, 462, 471, 474, 476, 480, 483, 485, 487 |
| 43 | Vehicle | 97, 123, 124, 143, 150, 151, 152, 176, 177, 178, 182, 193, 194, 195, 227, 228, 232, 282, 284, 314 |
| 47 | UAV | 197, 245, 275, 283, 305, 312, 326, 330, 337, 338, 350, 356, 357, 359, 372 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, W.; Li, A.; Zhang, H. Location Selection Methods for Urban Terminal Co-Distribution Centers with Air–Land Collaboration. Appl. Sci. 2024, 14, 5814. https://doi.org/10.3390/app14135814
Qi W, Li A, Zhang H. Location Selection Methods for Urban Terminal Co-Distribution Centers with Air–Land Collaboration. Applied Sciences. 2024; 14(13):5814. https://doi.org/10.3390/app14135814
Chicago/Turabian StyleQi, Wei, Ang Li, and Honghai Zhang. 2024. "Location Selection Methods for Urban Terminal Co-Distribution Centers with Air–Land Collaboration" Applied Sciences 14, no. 13: 5814. https://doi.org/10.3390/app14135814
APA StyleQi, W., Li, A., & Zhang, H. (2024). Location Selection Methods for Urban Terminal Co-Distribution Centers with Air–Land Collaboration. Applied Sciences, 14(13), 5814. https://doi.org/10.3390/app14135814