
Aerodynamic Analysis of Fixed-Wing Unmanned Aerial Vehicles Moving in Swarm


Abstract
1. Introduction
2. Materials and Methods
2.1. Geometry
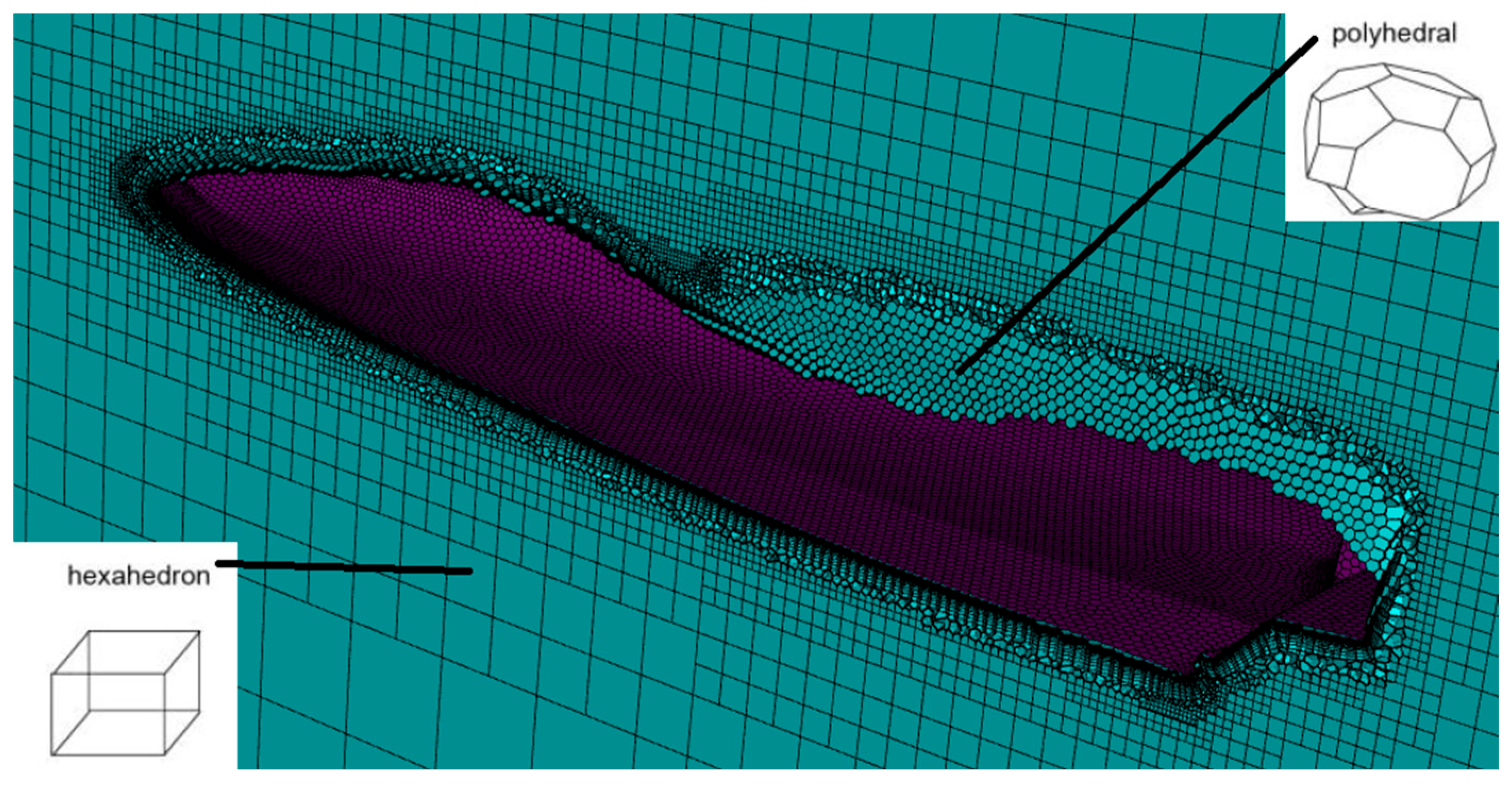
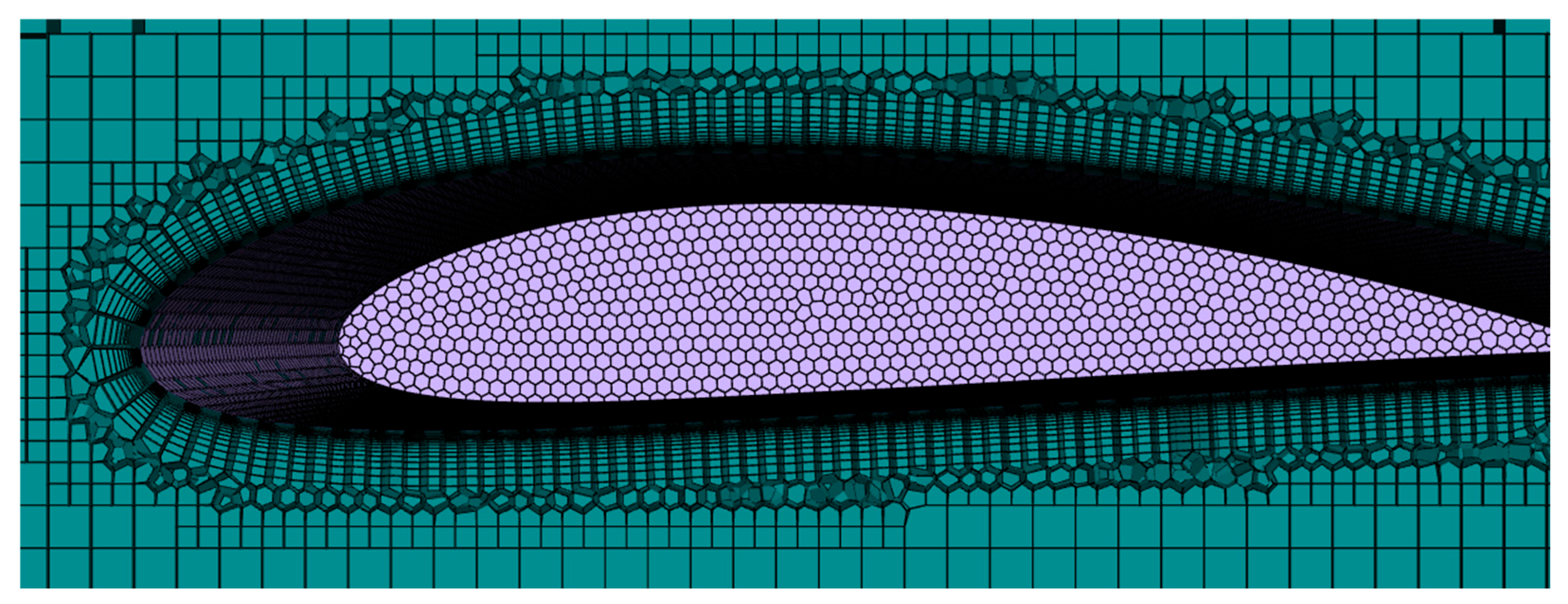
2.2. Meshing
2.3. Governing Equations
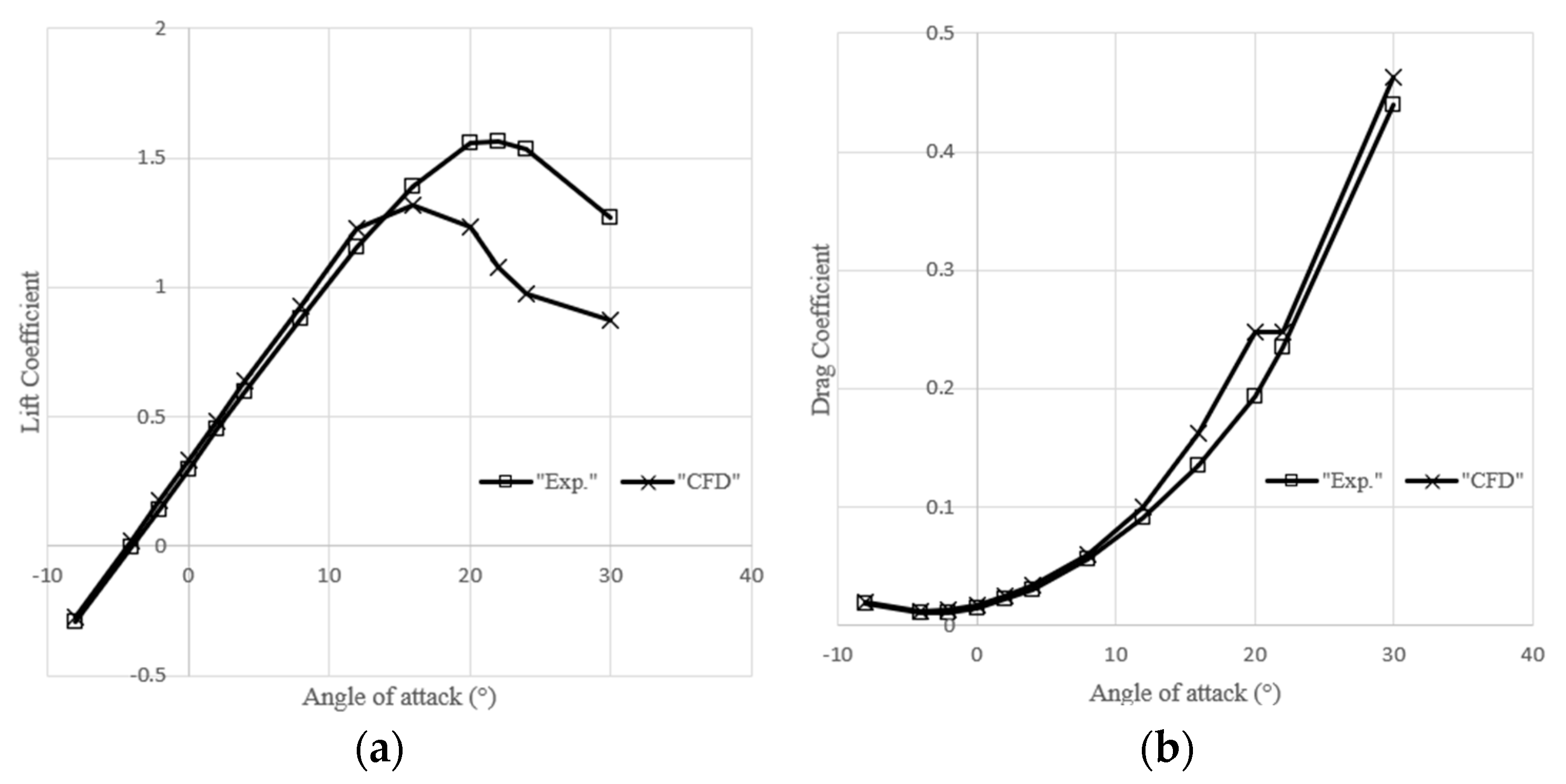
2.4. Validation
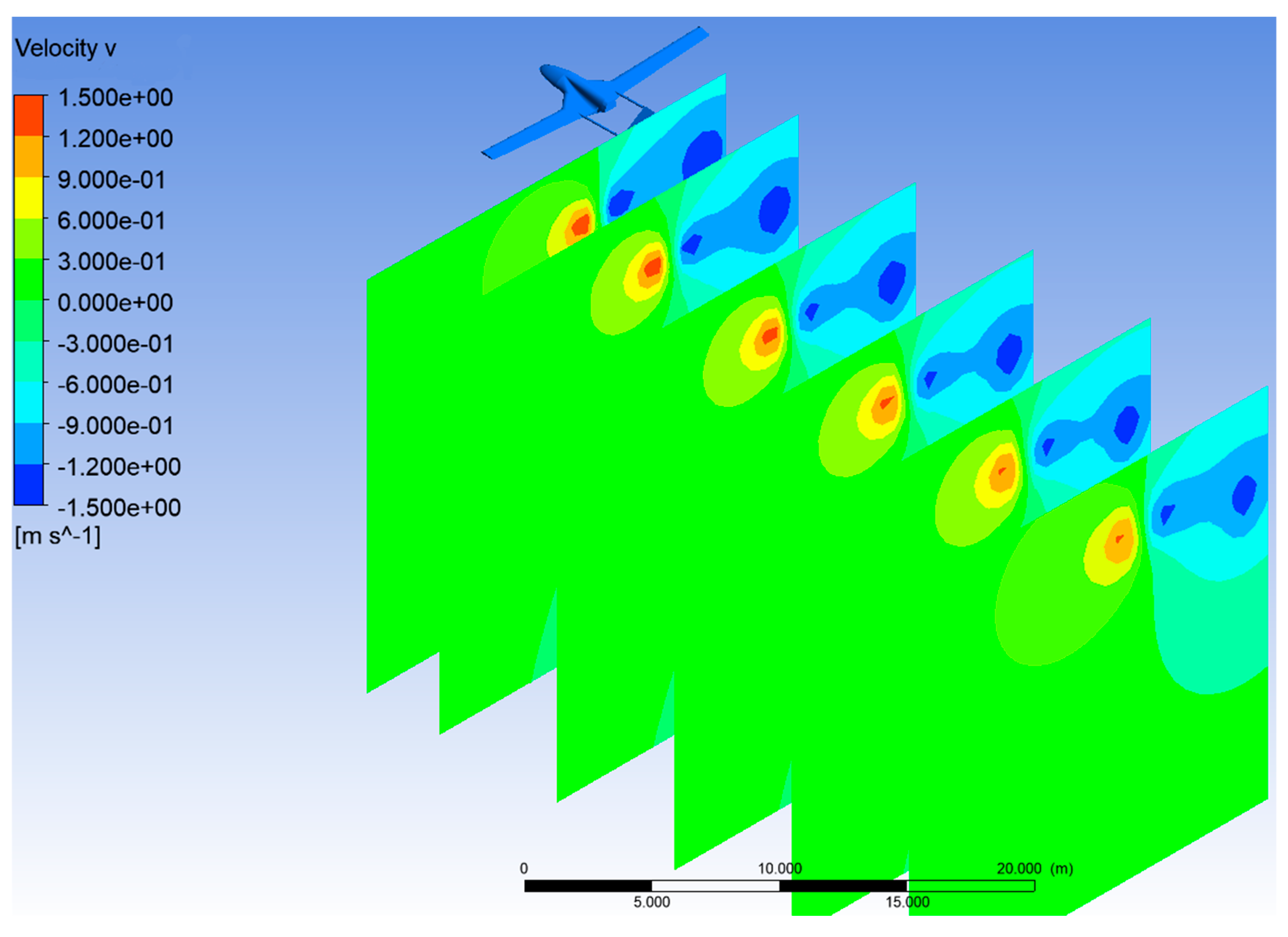
2.5. Aerodynamic Analysis of Single UAV
3. Aerodynamic Analysis of the Close-Formation Flight for Two UAVs
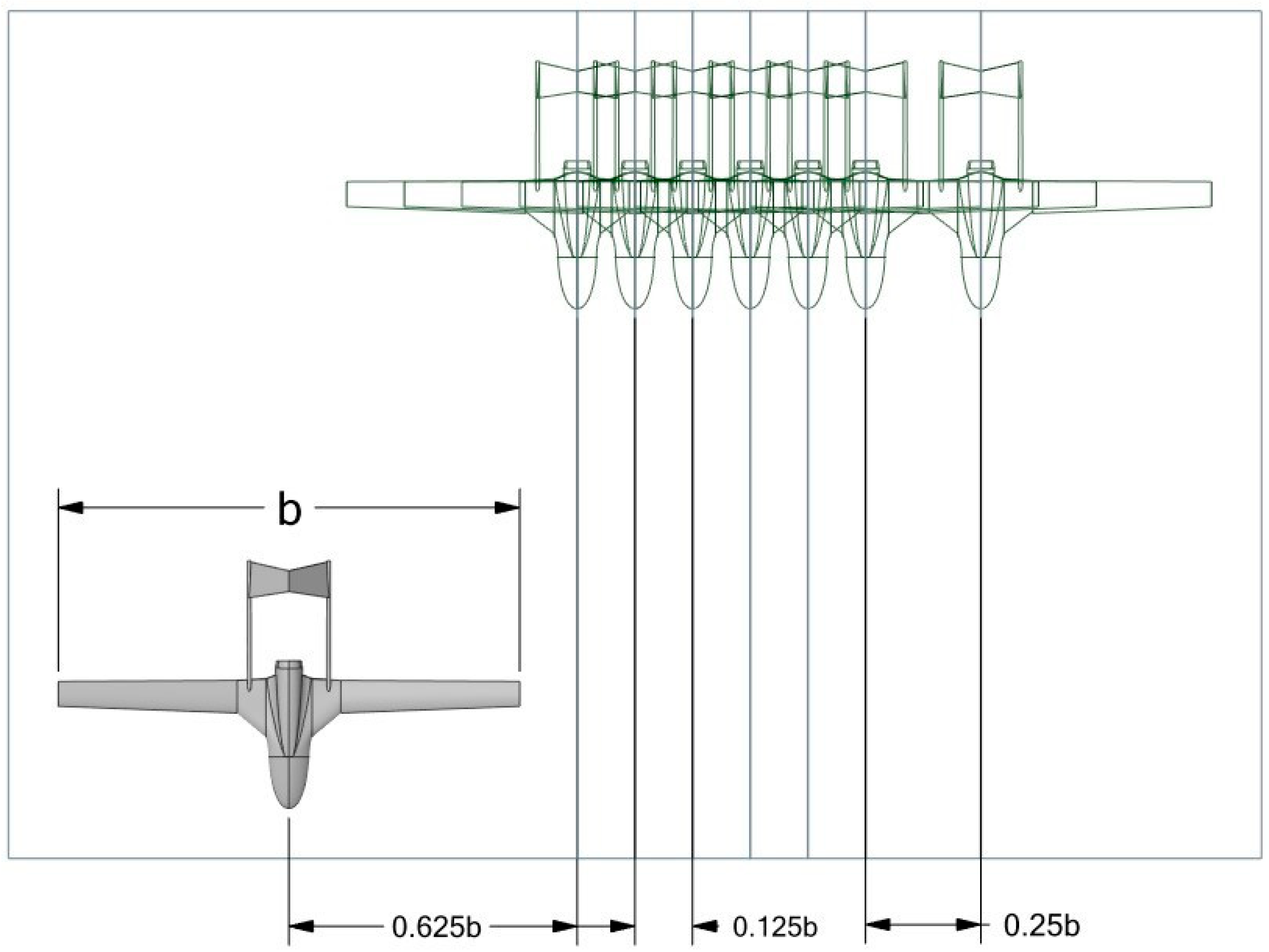
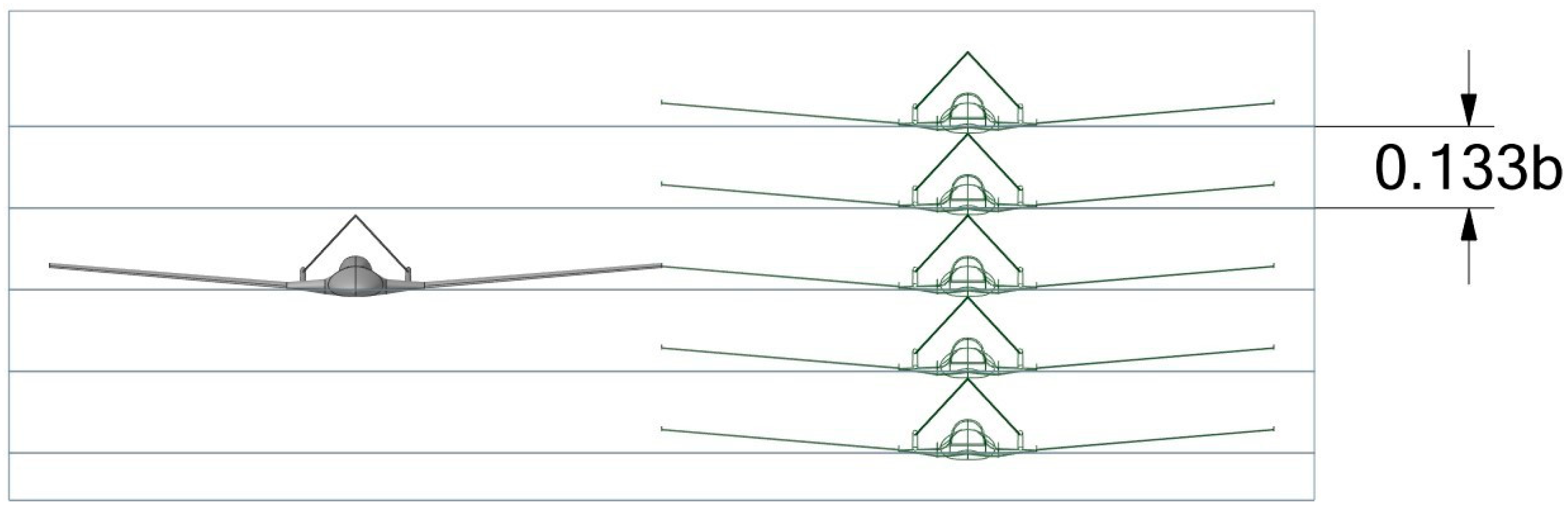
3.1. Formation Sequences
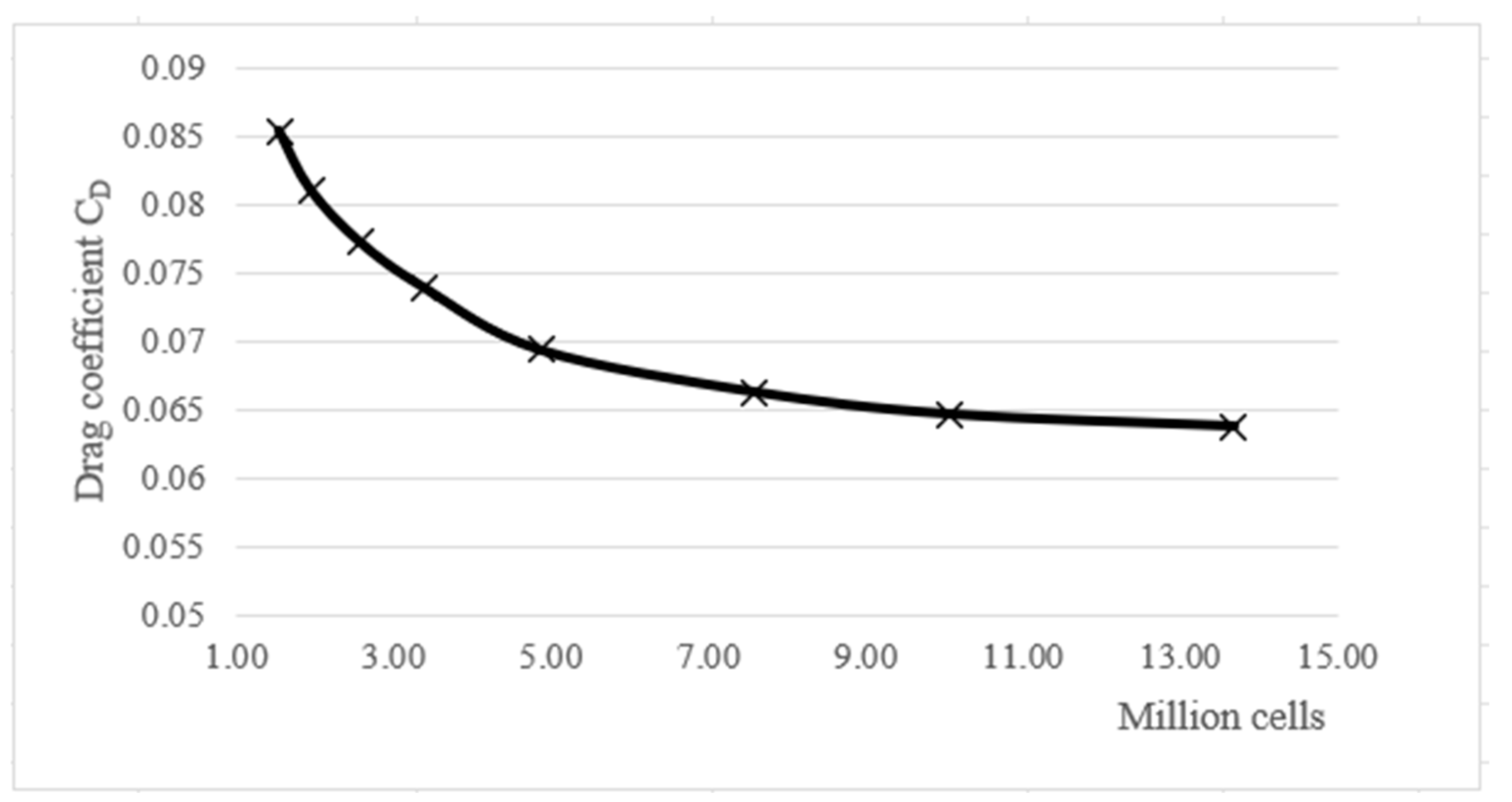
3.2. Mesh Independence
4. Results and Discussion
5. Conclusions
- (1)
- The characteristics in the aerodynamic interaction region of the longitudinal distance behind the UAV do not change greatly.
- (2)
- Two UAVs flying in close formation should avoid flying inside the wing line to avoid entering the downwash area, as this can have a negative interaction.
- (3)
- For the most efficient aerodynamic performance in close flight of swarm UAVs, they must fly at the same altitude, i.e., in the same vertical alignment.
- (4)
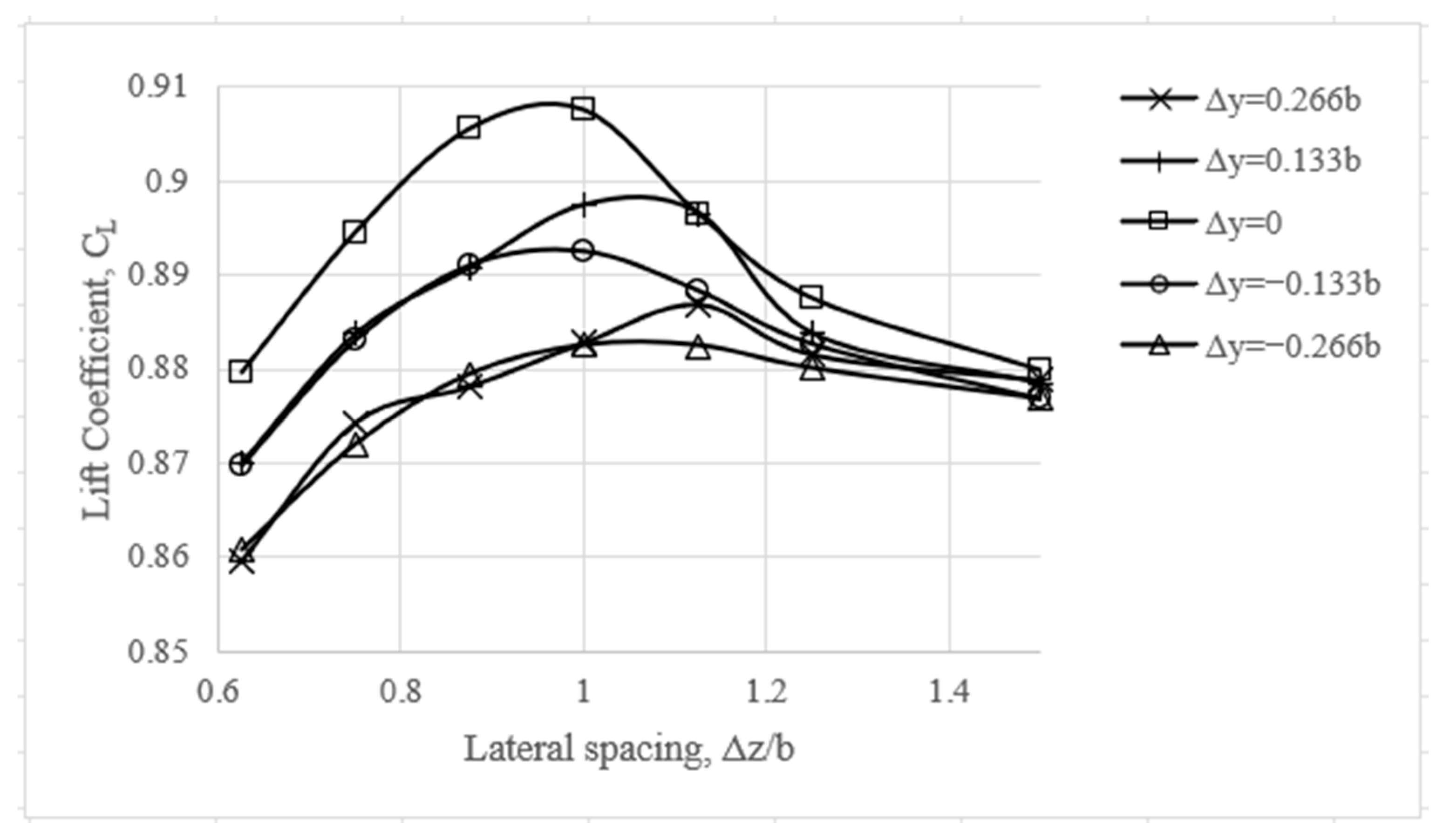
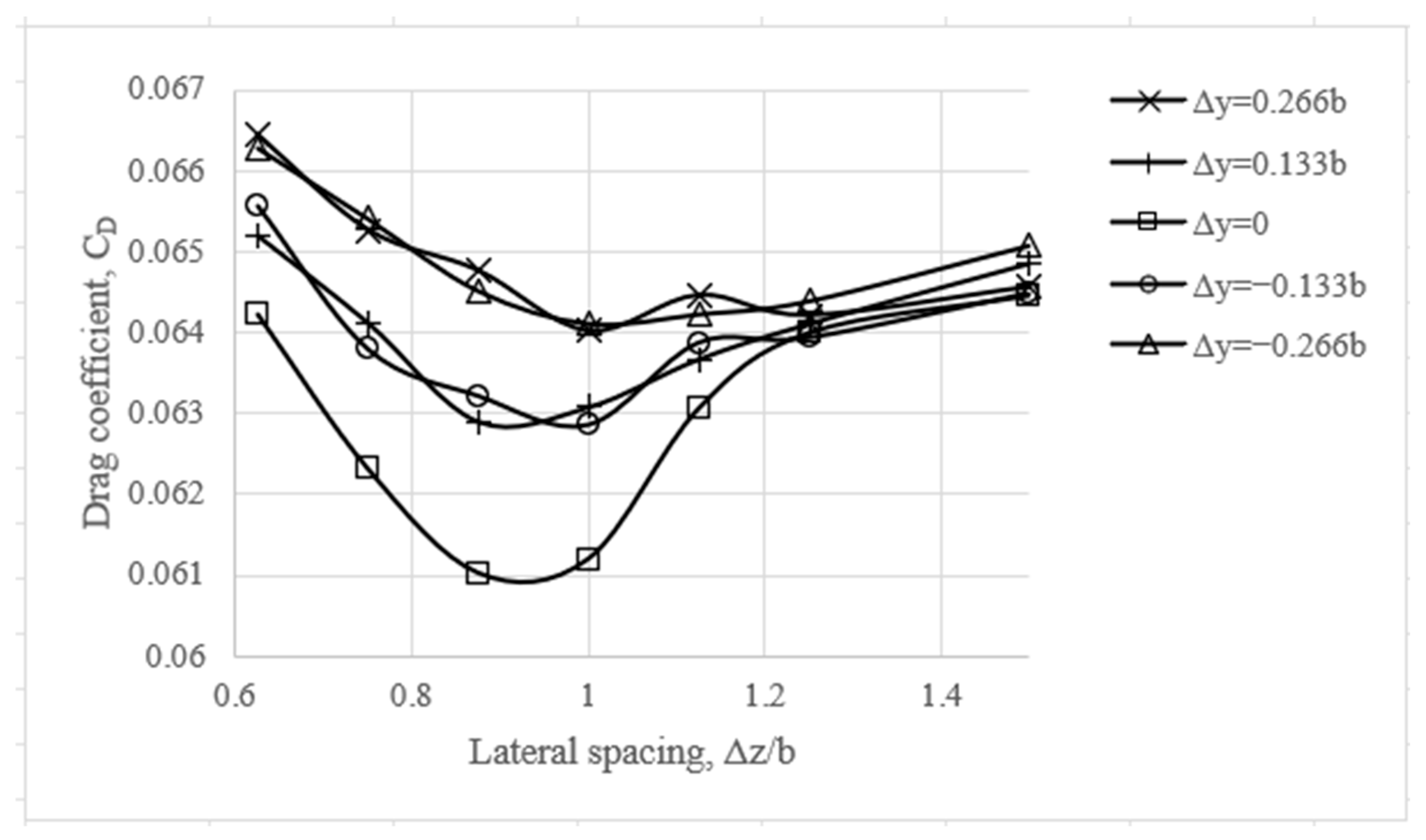
- For b wingspan, the most aerodynamically efficient spots for close-formation flight are lateral distances of 0.875b and 1b.
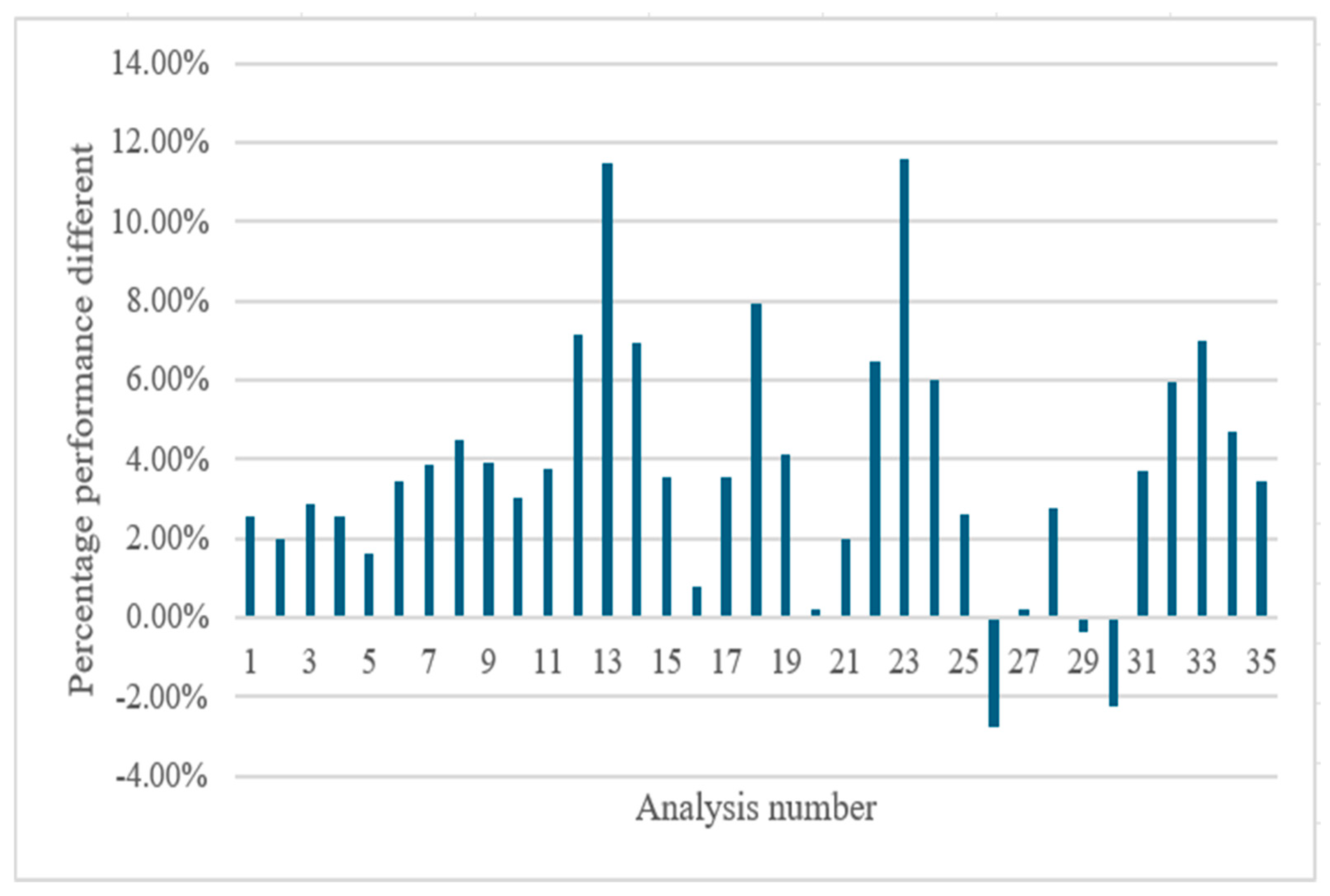
- (5)
- Considering CL/CD as an aerodynamic performance parameter, in the most efficient flight positions, the trailing UAV has an efficiency increase of about 11.5% compared to a single flight.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shao, Z.; Yan, F.; Zhou, Z.; Zhu, X. Path planning for multi-UAV formation Rendezvous based on distributed cooperative particle swarm optimization. Appl. Sci. 2019, 9, 2621. [Google Scholar] [CrossRef]
- Wieselsberger, C. Beitrag zur erklärung des winkelfluges einiger zugvöge. Z. FlugTechnick Mot. 1914, 5, 225–229. [Google Scholar]
- Lissaman, P.B.S.; Schollenberger, C.A. Formation flight of birds. Science 1970, 168, 1003–1005. [Google Scholar] [CrossRef] [PubMed]
- Hansen, J.L.; Cobleigh, B.R. Induced moment effects of formation flight using two F/A-18 aircraft. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Monterey, CA, USA, 5–8 August 2002. [Google Scholar]
- Pahle, J.; Berger, D.; Venti, M.; Duggan, C.; Faber, J.; Cardinal, K. An initial flight investigation of formation flight for drag reduction on the C-17 aircraft. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar]
- Dogan, A.; Venkataramanan, S.; Blake, W. Modeling of aerodynamic coupling between aircraft in close proximity. J. Aircr. 2005, 42, 941–955. [Google Scholar] [CrossRef]
- Singh, D.; Antoniadis, A.F.; Tsoutsanis, P.; Shin, H.; Tsourdos, A.; Mathekga, A.; Jenkins, K.W. A multi-fidelity approach for aerodynamic performance computations of formation flight. Aerospace 2018, 5, 66. [Google Scholar] [CrossRef]
- Yuan, G.; Xia, J.; Duan, H. A continuous modeling method via improved pigeon-inspired optimization for wake vortices in UAVs close formation flight. Aerosp. Sci. Technol. 2021, 120, 107259. [Google Scholar] [CrossRef]
- Blake, W.; Gingras, D.R. Comparison of predicted and measured formation flight interference effects. J. Aircr. 2004, 41, 201–207. [Google Scholar] [CrossRef]
- Trumic, E.; Swamy, K.S. Aerodynamic Performance Analysis of a UAV Using CFD and VLM. Master’s Thesis, Linköping University, Linköping, Sweden, 2021. [Google Scholar]
- Cui, X.; Yu, Y.; Ma, S.; Xiao, Z.; Zhang, L.; Liu, F. Numerical investigation of the aerodynamic interference in 2-aircraft formation flight. J. Phys. Conf. Ser. 2022, 2280, 012017. [Google Scholar] [CrossRef]
- Yang, T.; Zhiyong, L.; Neng, X.; Yan, S.; Jun, L. Optimization of positional parameters of close-formation flight for blended-wing-body configuration. Heliyon 2018, 4, e01019. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.; Chen, Y.; Dong, X.; Liu, Z.; Zhou, Y. Numerical aerodynamic characteristics analysis of the close formation flight. Math. Probl. Eng. 2018, 2018, 3136519. [Google Scholar] [CrossRef]
- Shin, H.; Antoniadis, A.F.; Tsourdos, A. Parametric study on efficient formation flying for a blended-wing UAV. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017. [Google Scholar]
- Panagiotou, P.; Yakinthos, K. Aerodynamic efficiency and performance enhancement of fixed-wing UAVs. Aerosp. Sci. Technol. 2019, 99, 105575. [Google Scholar] [CrossRef]
- Shunshun, W.; Zheng, G. Design, optimization and application of two-element airfoils for tactical UAV. Adv. Mech. Eng. 2022, 14, 1–14. [Google Scholar] [CrossRef]
- Pastor, L.G.S. Numerical Design and Optimization of a Rescue UAV’s Wing. Bachelor’s Thesis, Universitat Politècnica de València, Valencia, Spain, 2022. [Google Scholar]
- Arabacı, S.K.; Dilbaz, F. Aerodynamic Analysis of Anka UAV and Heron UAV. In Proceedings of the 2nd International Conference on Energy Research, Marmaris, Turkey, 11–13 April 2019. [Google Scholar]
- Zore, K.; Sasanapuri, B.; Parkhi, G.; Varghese, A. ANSYS mosaic poly-hexcore mesh for high-lift aircraft configuration. In Proceedings of the 21st Annual CFD Symposium, Bangalore, India, 8–9 August 2019. [Google Scholar]
- Pezzella, G.; Viviani, A. Aerodynamic Performance Analysis of Three Different Unmanned Re-entry Vehicles. In Advanced UAV Aerodynamics, Flight Stability and Control, 1st ed.; Marquès, P., Da Ronch, A., Eds.; Wiley: Hoboken, NJ, USA, 2017; pp. 49–141. [Google Scholar]
- Aydın, N.; Çalışkan, M.E.; Karagöz, İ. Numerical simulation of flow over NACA 0015 airfoil with different turbulence models. Int. J. Energy Appl. Technol. 2020, 7, 42–49. [Google Scholar] [CrossRef]
- Menter, F.R. Zonal two equation k-ω turbulence models for aerodynamic flows. In Proceedings of the 24th Fluid Dynamics Conference, Orlando, FL, USA, 6–9 July 1993. [Google Scholar]
- Jacobs, E.N.; Ward, K.E.; Pinkerton, R.M. The Characteristics of 78 Related Airfoil Sections from Tests in the Variable-Density Wind Tunnel; Report No. 460; National Advisory Committee for Aeronautics: Washington, DC, USA, 1935. [Google Scholar]
- Steenwijk, B.; Druetta, P. Numerical study of turbulent flows oner a NACA 0012 airfoil: Insights into its performance and the addition of a slotted flap. Appl. Sci. 2023, 17, 7890. [Google Scholar] [CrossRef]
- Çengel, Y.; Cimbala, J.M. Akışkanlar Mekaniği, 1st ed.; Güven Bilimsel: İzmir, Türkiye, 2008. [Google Scholar]
- Baykar. Available online: https://baykartech.com/tr/uav/bayraktar-tb2/ (accessed on 13 May 2024).
- Munk, M.M. The Minimum Induced Drag of Aerofoils; Report No. 121; National Advisory Committee for Aeronautics: Washington, DC, USA, 1923. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Wingspan | 12 m |
| Length | 6.5 m |
| Chord length (mean) | 0.78 m |
| Height | 1.6 m |
| Area | 9.34 m2 |
| Parameter | Value |
|---|---|
| Altitude | 5500 m |
| Density | 0.6975 kg/m3 |
| Viscosity | 1.6115 × 10−5 kg/(m·s) |
| Velocity | 36.01 m/s |
| Re | 1,215,714.58 |
| ∆z | ∆y = 3.2 m | ∆y = 1.6 m | ∆y = 0 m | ∆y = −1.6 m | ∆y = −3.2 m |
|---|---|---|---|---|---|
| 18 m | Analysis 1 | Analysis 2 | Analysis 3 | Analysis 4 | Analysis 5 |
| 15 m | Analysis 6 | Analysis 7 | Analysis 8 | Analysis 9 | Analysis 10 |
| 12 m | Analysis 11 | Analysis 12 | Analysis 13 | Analysis 14 | Analysis 15 |
| 9 m | Analysis 16 | Analysis 17 | Analysis 18 | Analysis 19 | Analysis 20 |
| 10.5 m | Analysis 21 | Analysis 22 | Analysis 23 | Analysis 24 | Analysis 25 |
| 7.5 m | Analysis 26 | Analysis 27 | Analysis 28 | Analysis 29 | Analysis 30 |
| 13.5 m | Analysis 31 | Analysis 32 | Analysis 33 | Analysis 34 | Analysis 35 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
İnan, A.T.; Ceylan, M. Aerodynamic Analysis of Fixed-Wing Unmanned Aerial Vehicles Moving in Swarm. Appl. Sci. 2024, 14, 6463. https://doi.org/10.3390/app14156463
İnan AT, Ceylan M. Aerodynamic Analysis of Fixed-Wing Unmanned Aerial Vehicles Moving in Swarm. Applied Sciences. 2024; 14(15):6463. https://doi.org/10.3390/app14156463
Chicago/Turabian Styleİnan, Ahmet Talat, and Mustafa Ceylan. 2024. "Aerodynamic Analysis of Fixed-Wing Unmanned Aerial Vehicles Moving in Swarm" Applied Sciences 14, no. 15: 6463. https://doi.org/10.3390/app14156463
APA Styleİnan, A. T., & Ceylan, M. (2024). Aerodynamic Analysis of Fixed-Wing Unmanned Aerial Vehicles Moving in Swarm. Applied Sciences, 14(15), 6463. https://doi.org/10.3390/app14156463