
Reconstruction of High-Frequency Bridge Responses Based on Physical Characteristics of VBI System with BP-ANN

Abstract
:Featured Application
Abstract
1. Introduction
2. Methodology
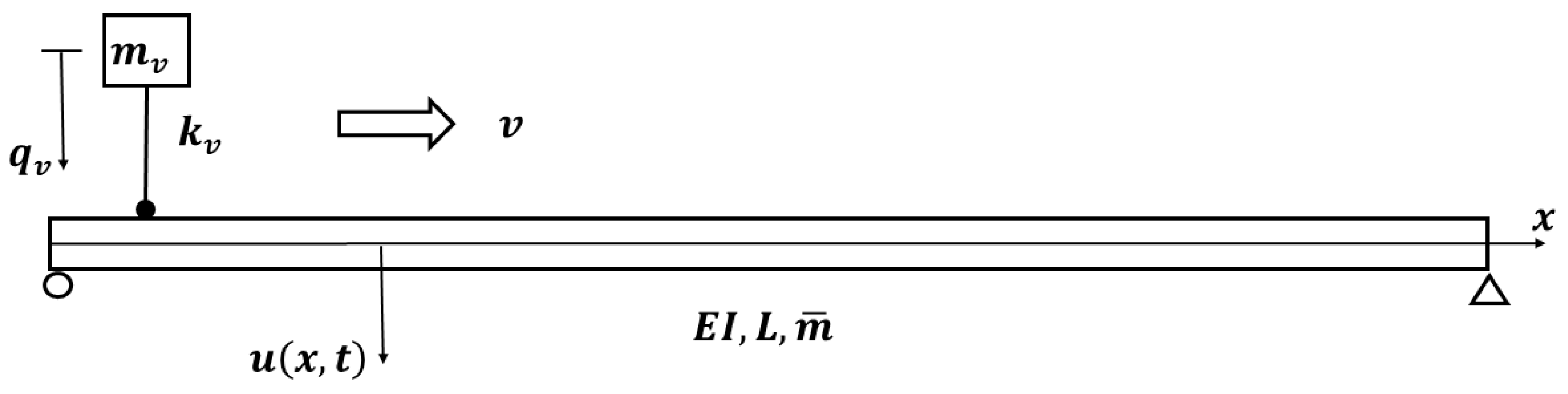
2.1. Dynamics of a VBI System
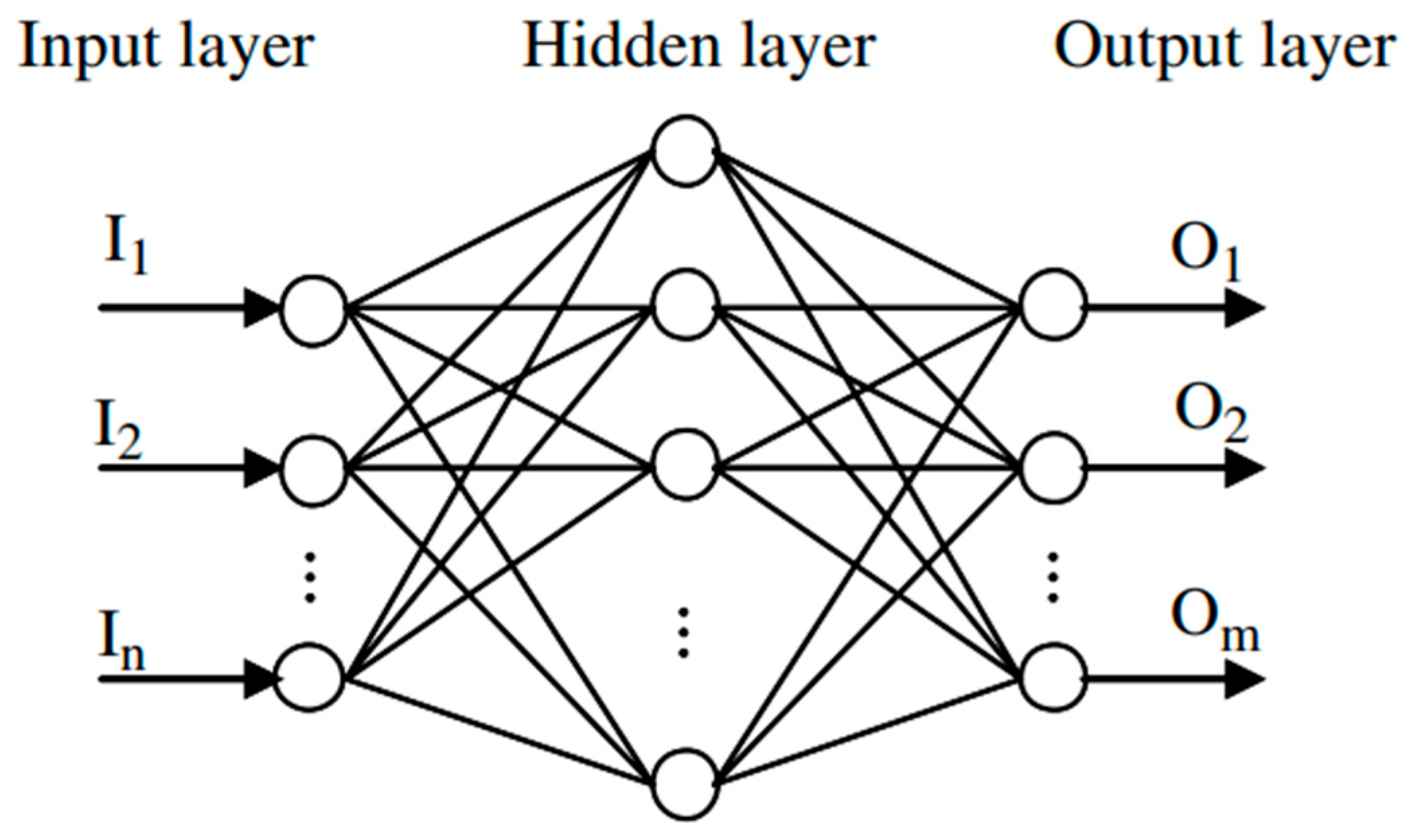
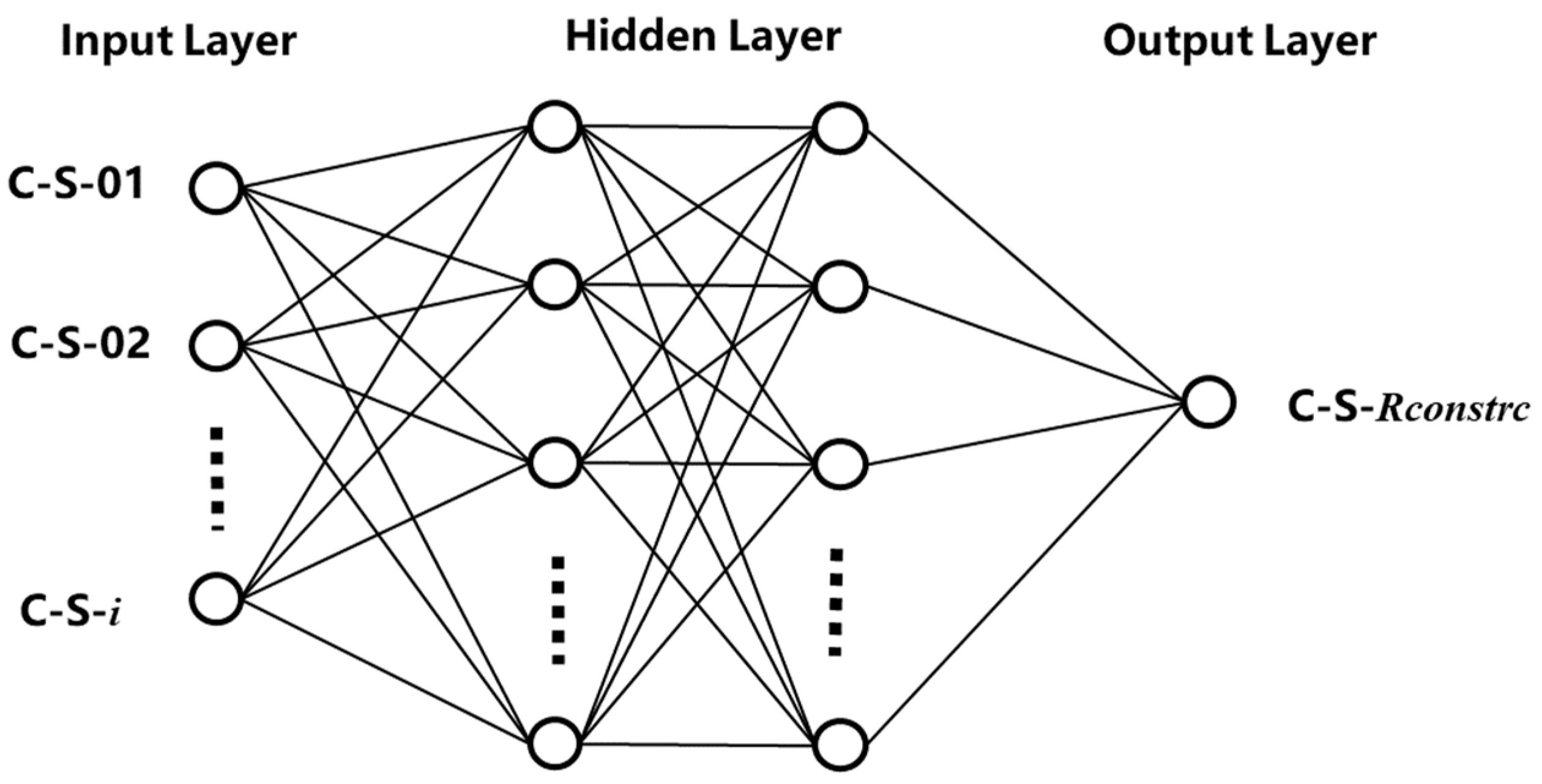
2.2. Application of the BP-ANN
3. Finite Element Simulation
3.1. Finite Element Models
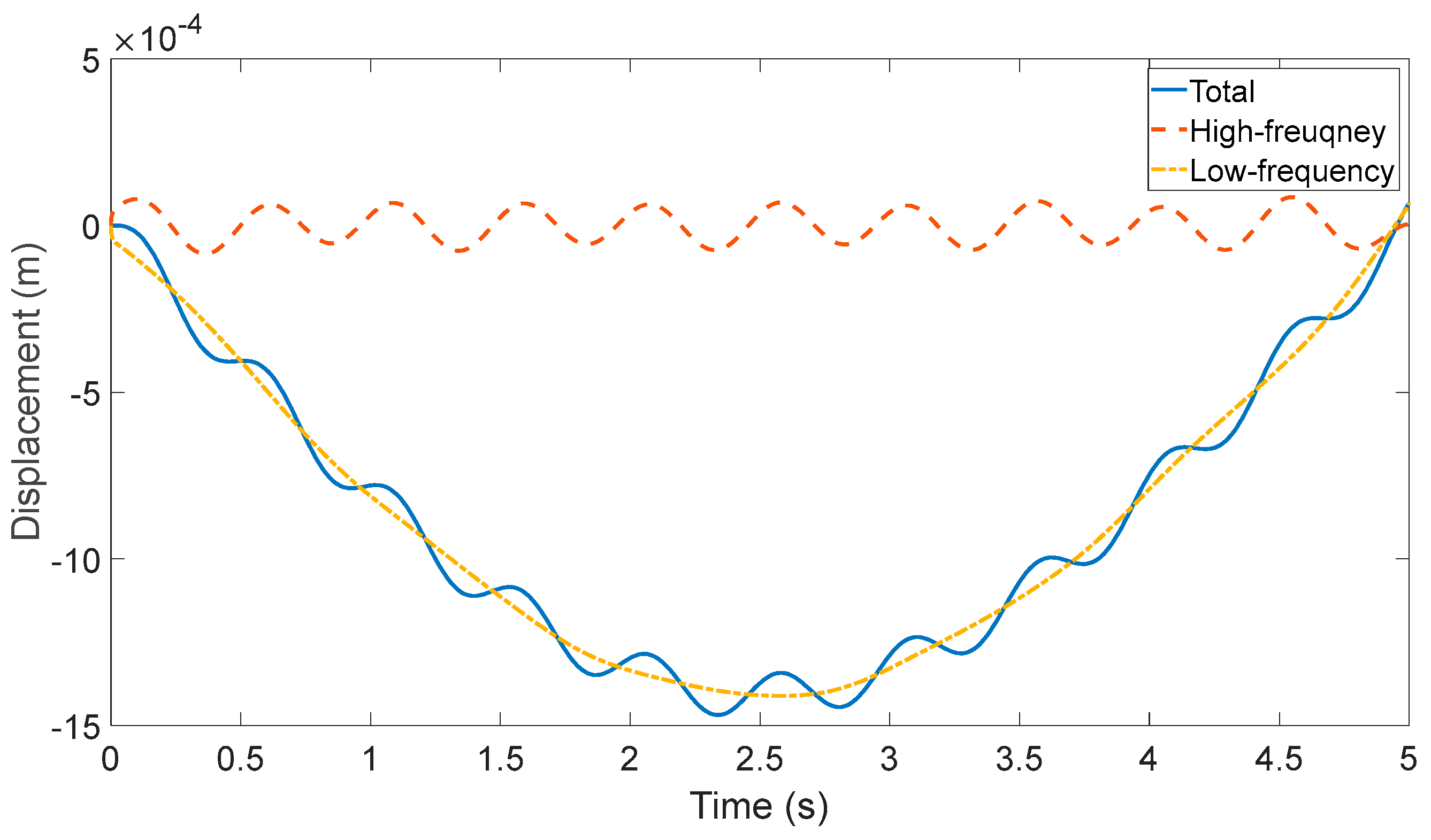
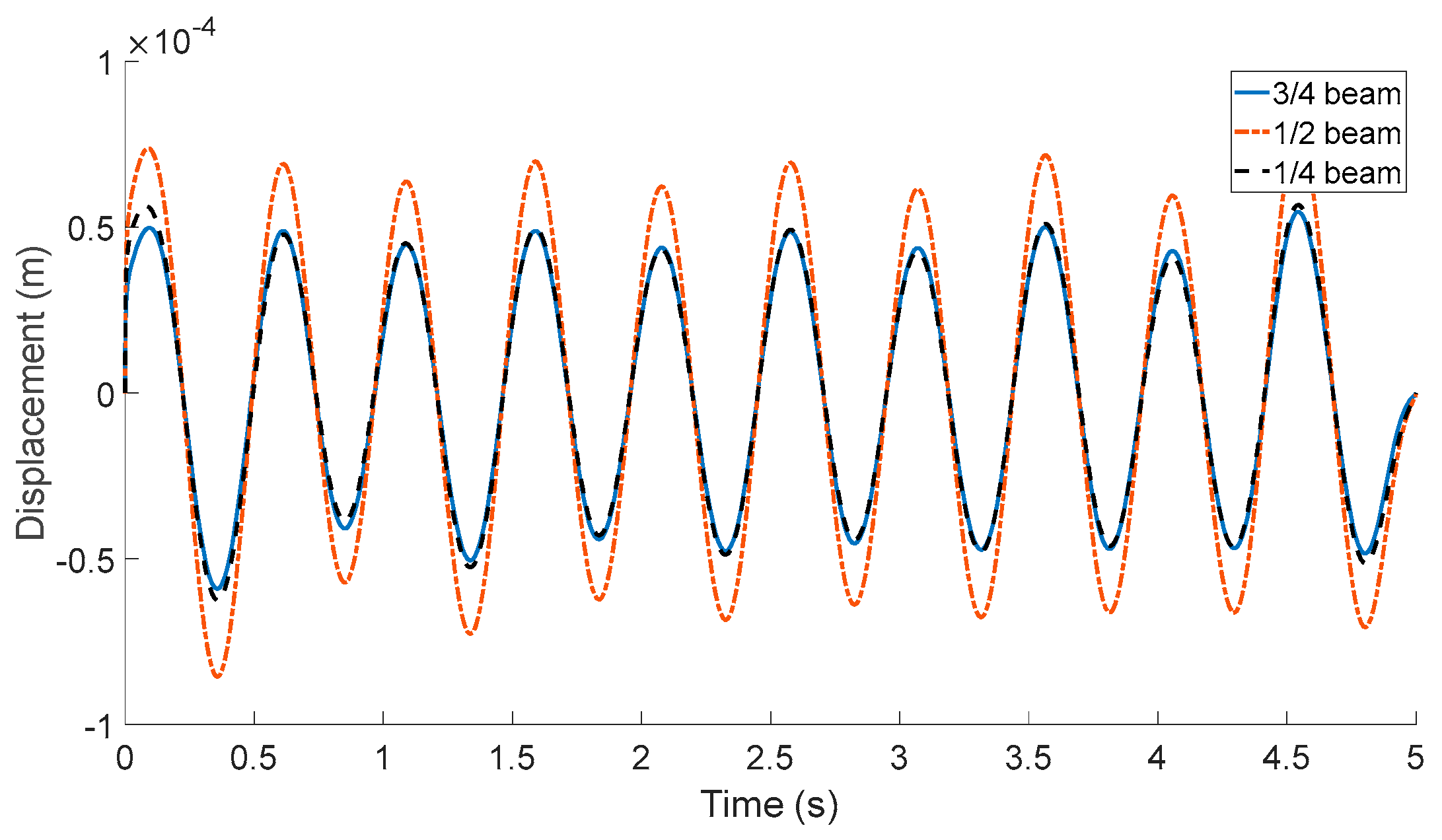
3.2. Physical Characteristics of High-Frequency Bridge Responses
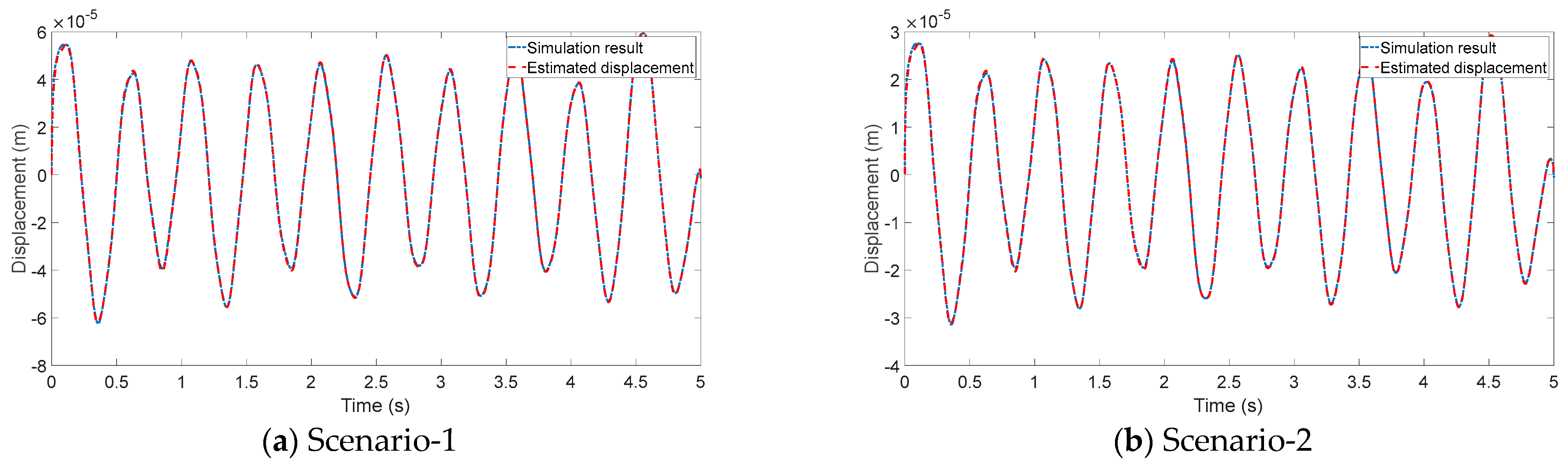
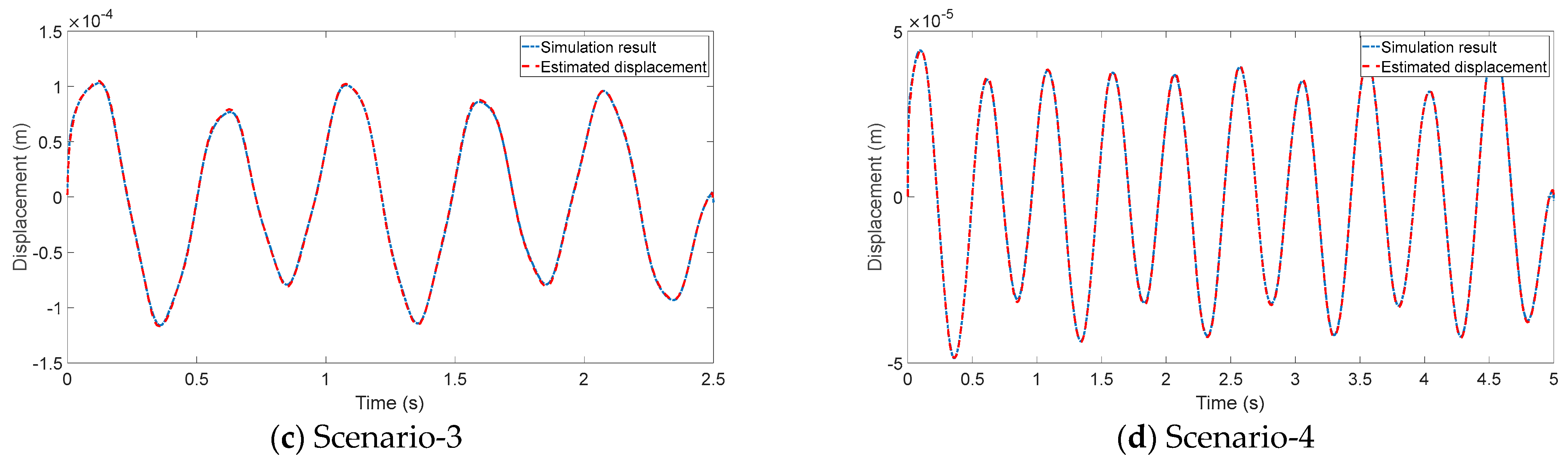
3.3. Validation of the Time-Invariant Relationship
- (1)
- Scenario-1—The above finite element model with a simply supported beam and quarter-vehicle;
- (2)
- Scenario-2—A vehicle with a different frequency and half the mass of Scenario-1 to simulate a different mass and a different bouncing frequency of the vehicle;
- (3)
- Scenario-3—A vehicle with different speed (the vehicle’s speed in this scenario was twice that of Scenario-1 (10 m/s));
- (4)
- Scenario-4—Simultaneous vehicle traffic, whereby two vehicles traverse the beam, moving in opposite directions, and the first vehicle mirrors the physical attributes and velocity of the vehicle featured in Scenario-1, whereas the second vehicle possesses half the mass and progresses at a reduced speed of 3 m/s.
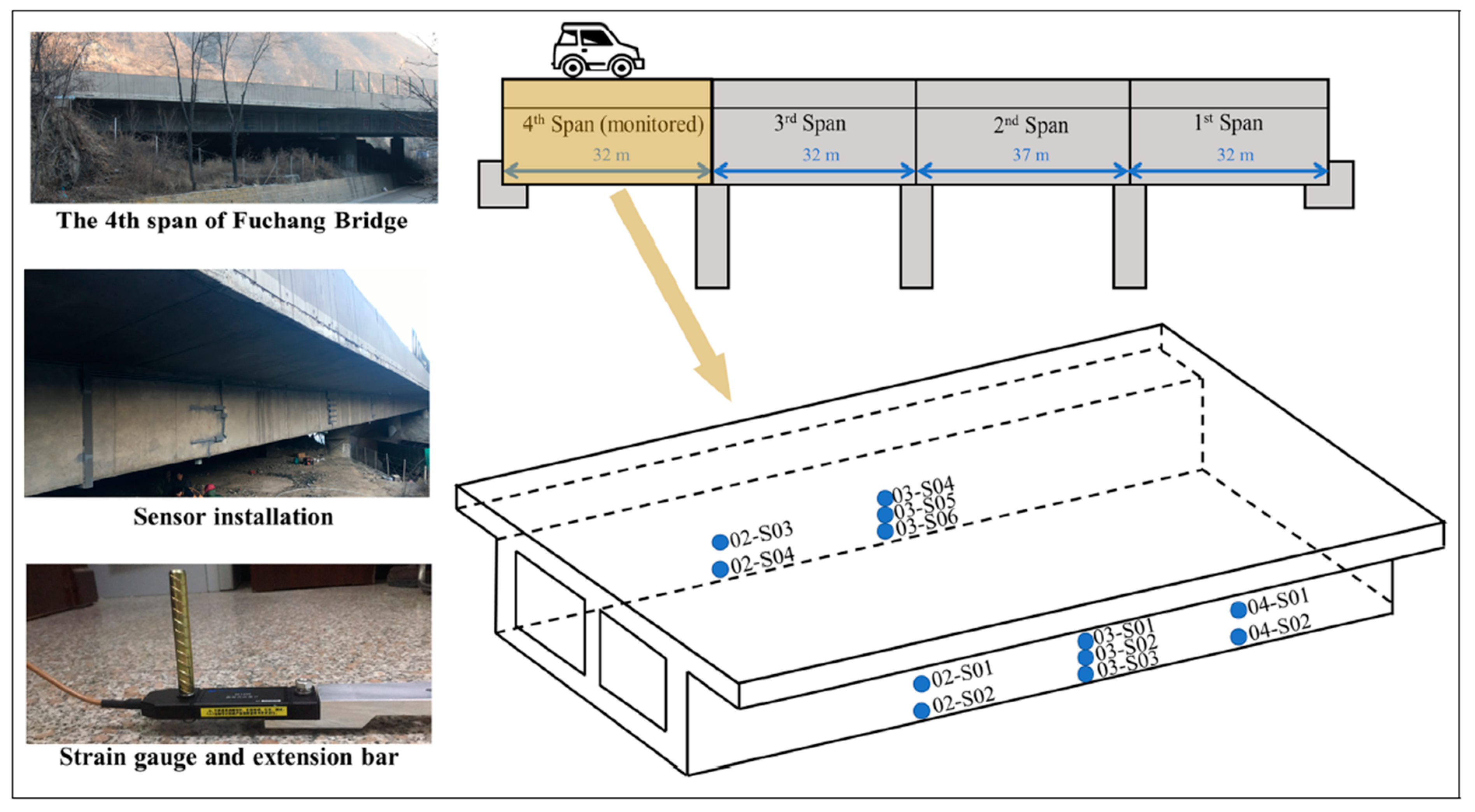
4. Response Reconstruction for an Actual Continuous Bridge
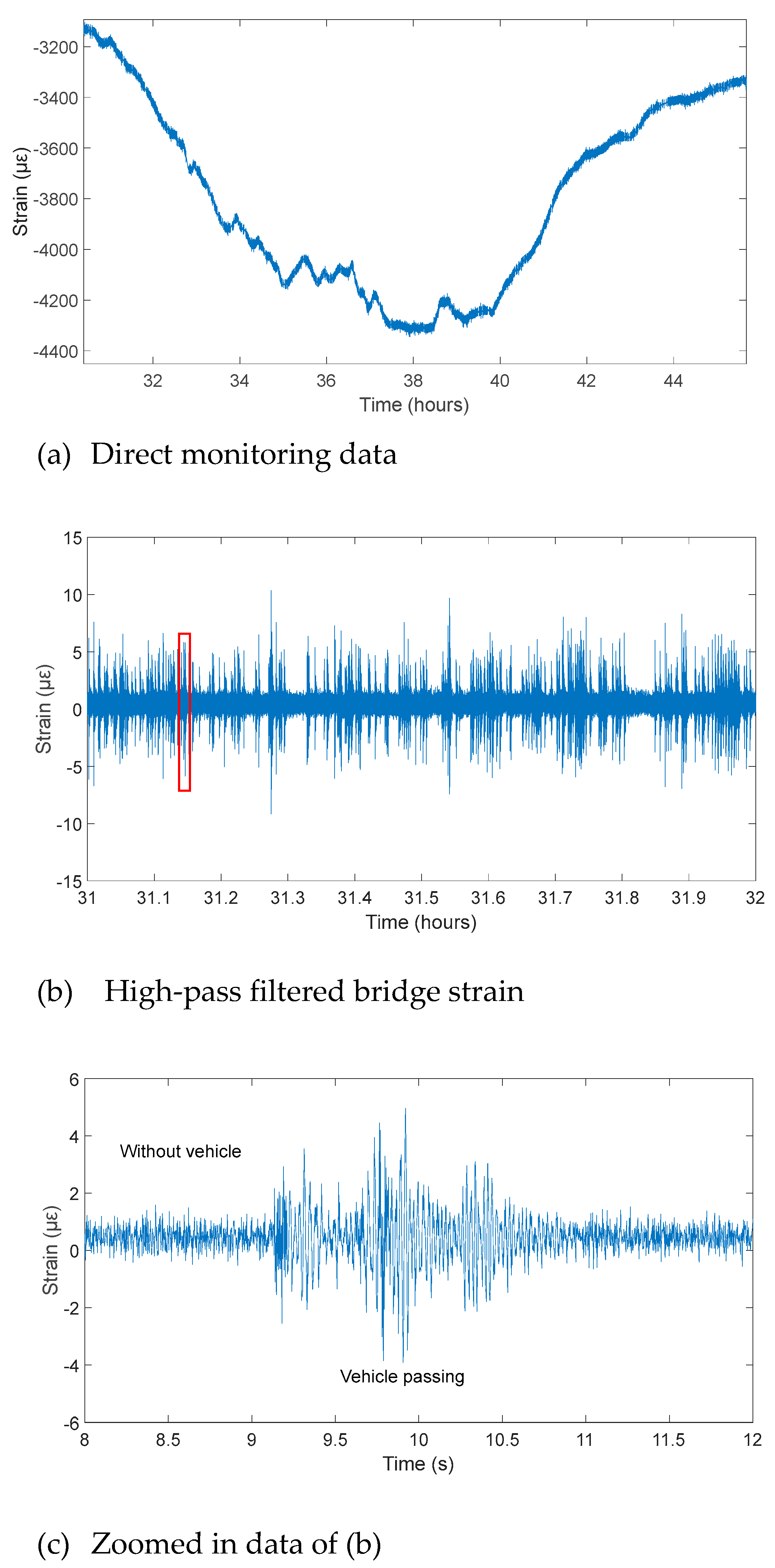
4.1. Information on the Continuous Bridge and Monitoring System
4.2. Data Preparation and ANN Configuration
4.3. Data Analysis
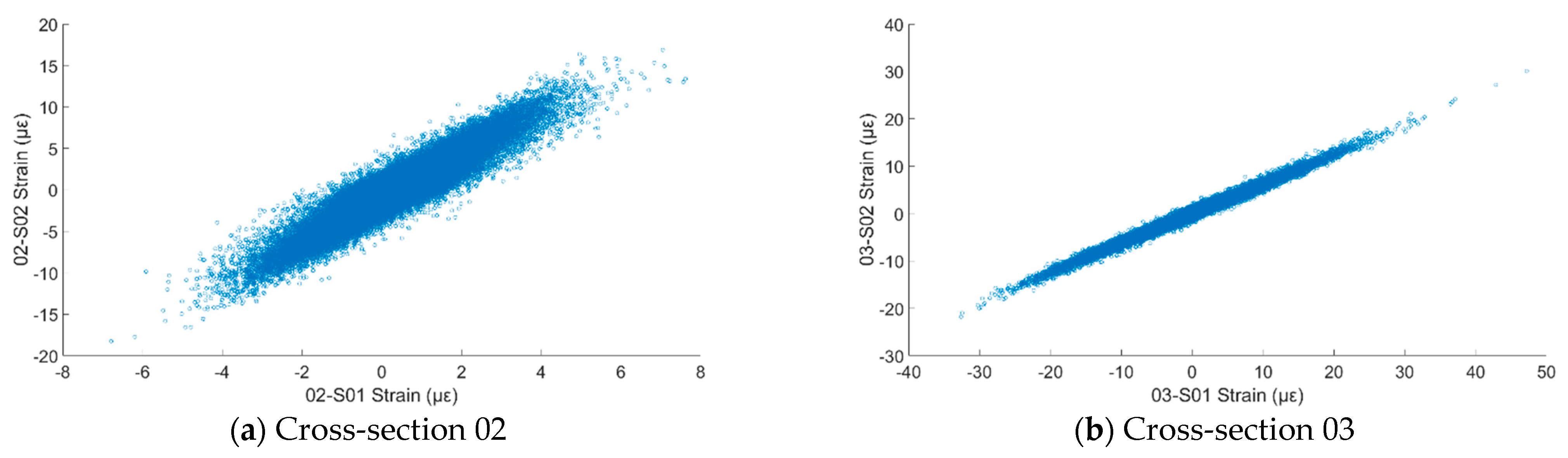
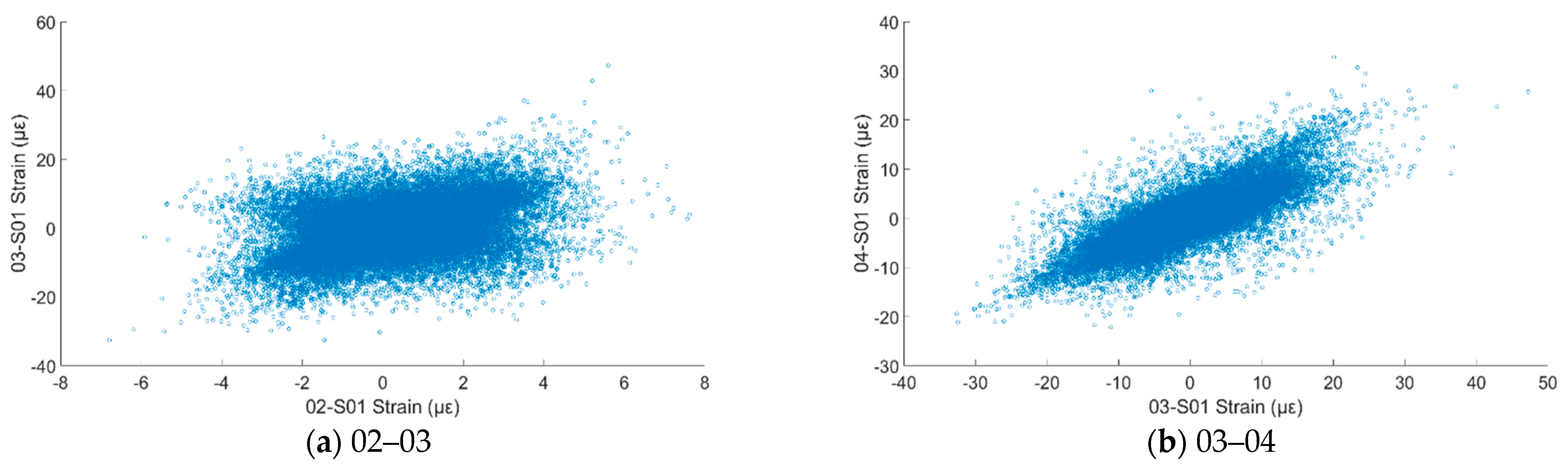
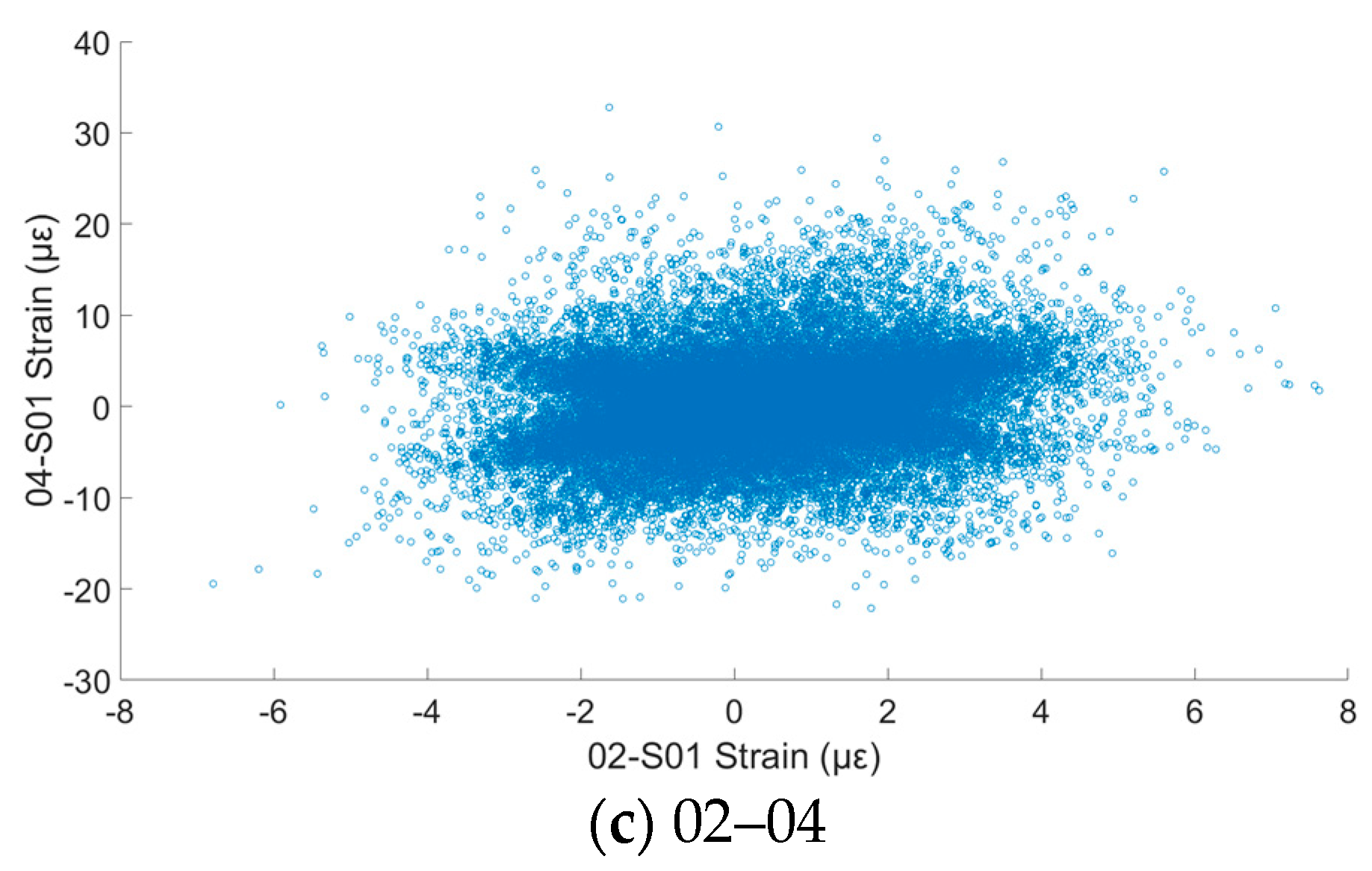
4.3.1. Intersectional Relationship between High-Frequency Responses
4.3.2. Case Configuration
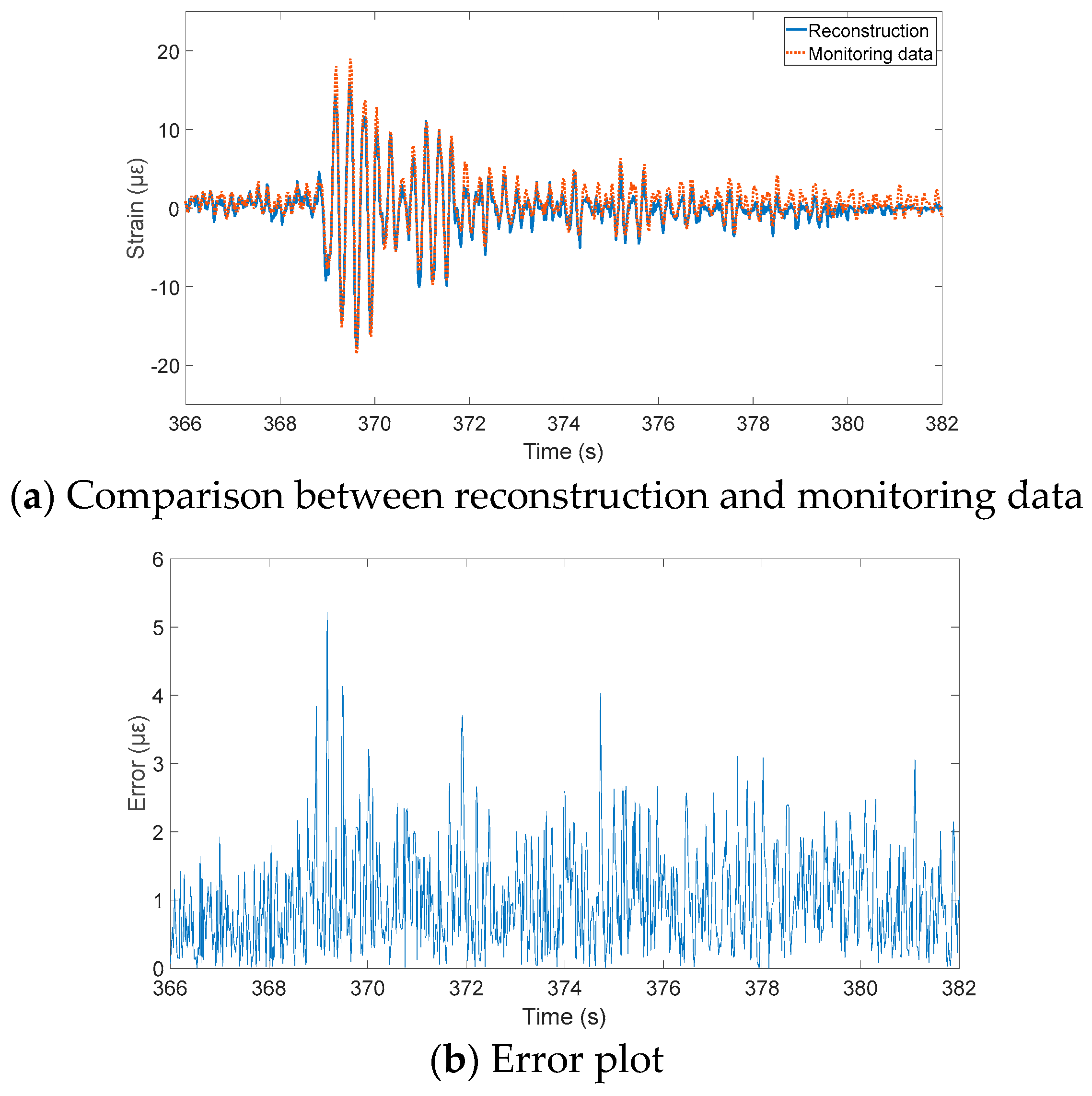
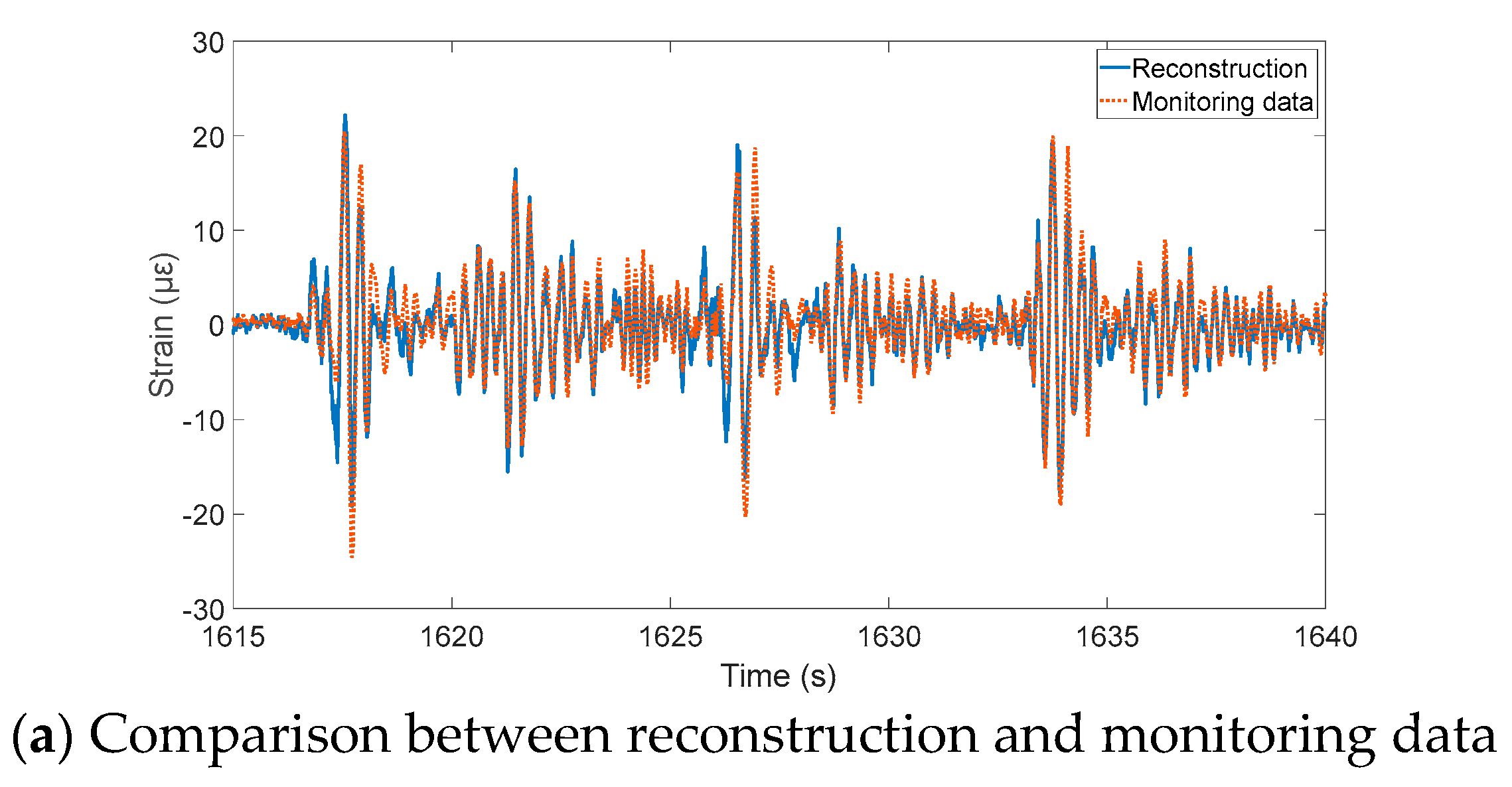
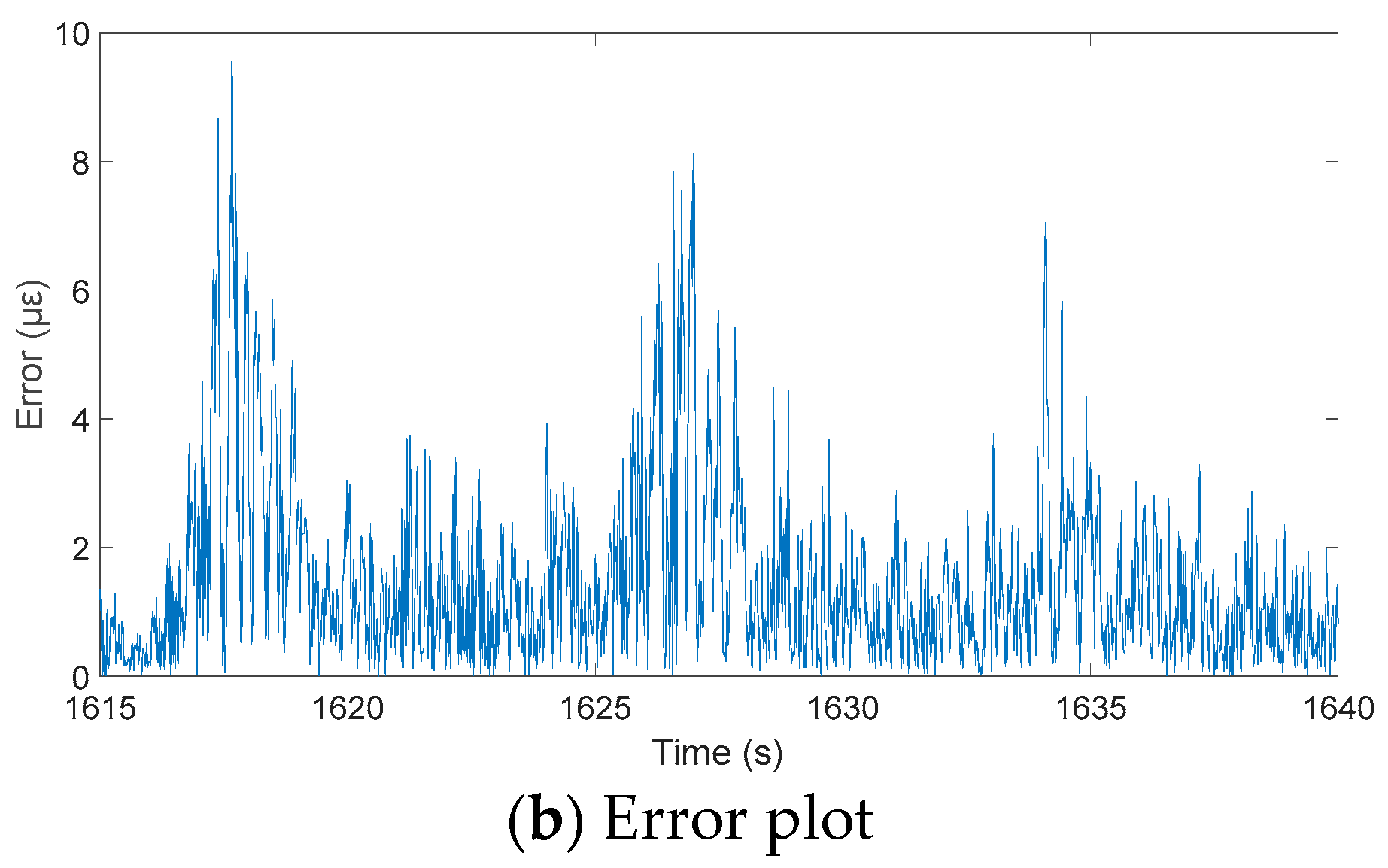
4.3.3. Result Analysis
5. Conclusions
- (1)
- Essentially, this relationship can be characterized as a transfer matrix that is associated with mode shapes. The target relationship should remain constant and time-invariant under varying traffic and temperature conditions.
- (2)
- The BP-ANN method proved to be an effective tool for reconstructing responses across various cross-sections. In the field test, the reconstruction result matched well with the monitoring data.
- (3)
- The proposed method facilitated the utilization of relatively short-term monitoring data to reconstruct long-term bridge responses effectively.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sun, L.; Li, Y.; Zhu, W.; Zhang, W. Structural Response Reconstruction in Physical Coordinate from Deficient Measurements. Eng. Struct. 2020, 212, 110484. [Google Scholar] [CrossRef]
- Lu, Y.; Tang, L.; Chen, C.; Zhou, L.; Liu, Z.; Liu, Y.; Jiang, Z.; Yang, B. Reconstruction of Structural Long-Term Acceleration Response Based on BiLSTM Networks. Eng. Struct. 2023, 285, 116000. [Google Scholar] [CrossRef]
- Almutairi, M.; Nikitas, N.; Abdeljaber, O.; Avci, O.; Bocian, M. A Methodological Approach towards Evaluating Structural Damage Severity Using 1D CNNs. Structures 2021, 34, 4435–4446. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, Z.; Jian, Z.; Liu, G.; Liu, X. A Two-Step Method for Beam Bridge Damage Identification Based on Strain Response Reconstruction and Statistical Theory. Meas. Sci. Technol. 2020, 31, 075008. [Google Scholar] [CrossRef]
- Ni, P.; Han, Q.; Du, X.; Cheng, X. Bayesian Model Updating of Civil Structures with Likelihood-Free Inference Approach and Response Reconstruction Technique. Mech. Syst. Signal Process. 2022, 164, 108204. [Google Scholar] [CrossRef]
- Deng, L.; Cai, C.S. Bridge Model Updating Using Response Surface Method and Genetic Algorithm. J. Bridge Eng. 2010, 15, 553–564. [Google Scholar] [CrossRef]
- Altunişik Ahmet, C.; Kalkan, E.; Okur Fatih, Y.; Olguhan Şevket, K.; Korhan, O. Finite-Element Model Updating and Dynamic Responses of Reconstructed Historical Timber Bridges using Ambient Vibration Test Results. J. Perform. Constr. Facil. 2020, 34, 04019085. [Google Scholar] [CrossRef]
- Jiang, K.; Han, Q.; Du, X.; Ni, P. Structural Dynamic Response Reconstruction and Virtual Sensing Using a Sequence to Sequence Modeling with Attention Mechanism. Autom. Constr. 2021, 131, 103895. [Google Scholar] [CrossRef]
- Lei, X.; Siringoringo, D.M.; Sun, Z.; Fujino, Y. Displacement Response Estimation of a Cable-Stayed Bridge Subjected to Various Loading Conditions with One-Dimensional Residual Convolutional Autoencoder Method. Struct. Health Monit. 2023, 22, 1790–1806. [Google Scholar] [CrossRef]
- Overschee, P.; Moor, B. Subspace Identification for Linear Systems: Theory—Implementation—Applications; Springer: Norwell, MA, USA, 1996; Volume 1. [Google Scholar]
- Peeters, B.; De Roeck, G. Reference-based stochastic subspace identification for output-only modal analysis. Mech. Syst. Signal Process. 1999, 13, 855–878. [Google Scholar] [CrossRef]
- Yang, X.-M.; Yi, T.-H.; Qu, C.-X.; Li, H.-N.; Liu, H. Automated eigensystem realization algorithm for operational modal identification of bridge structures. J. Aerosp. Eng. 2019, 32, 04018148. [Google Scholar] [CrossRef]
- Zhang, G.; Ma, J.; Chen, Z.; Wang, R. Automated Eigensystem Realisation Algorithm for Operational Modal Analysis. J. Sound Vib. 2014, 333, 3550–3563. [Google Scholar] [CrossRef]
- Hossain, M.S.; Ong, Z.C.; Ismail, Z.; Noroozi, S.; Khoo, S.Y. Artificial Neural Networks for Vibration Based Inverse Parametric Identifications: A Review. Appl. Soft Comput. 2017, 52, 203–219. [Google Scholar] [CrossRef]
- Xin, J.; Zhou, C.; Jiang, Y.; Tang, Q.; Yang, X.; Zhou, J. A Signal Recovery Method for Bridge Monitoring System Using TVFEMD and Encoder-Decoder Aided LSTM. Measurement 2023, 214, 112797. [Google Scholar] [CrossRef]
- Oh, B.K.; Glisic, B.; Kim, Y.; Park, H.S. Convolutional Neural Network–Based Data Recovery Method for Structural Health Monitoring. Struct. Health Monit. 2020, 19, 1821–1838. [Google Scholar] [CrossRef]
- Zhang, H.; Xu, C.; Jiang, J.; Shu, J.; Sun, L.; Zhang, Z. A Data-Driven Based Response Reconstruction Method of Plate Structure with Conditional Generative Adversarial Network. Sensors 2023, 23, 6750. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Meng, L.; Mao, Z.; Sun, H. Spatiotemporal Deep Learning for Bridge Response Forecasting. J. Struct. Eng. 2021, 147, 04021070. [Google Scholar] [CrossRef]
- Tian, Y.; Xu, Y.; Zhang, D.; Li, H. Relationship Modeling between Vehicle-induced Girder Vertical Deflection and Cable Tension by BiLSTM Using Field Monitoring Data of a Cable-stayed Bridge. Struct. Control Health Monit. 2021, 28, e2667. [Google Scholar] [CrossRef]
- Ni, P.; Li, Y.; Sun, L.; Wang, A. Traffic-Induced Bridge Displacement Reconstruction Using a Physics-Informed Convolutional Neural Network. Comput. Struct. 2022, 271, 106863. [Google Scholar] [CrossRef]
- Oh, B.K.; Kim, J. Optimal Architecture of a Convolutional Neural Network to Estimate Structural Responses for Safety Evaluation of the Structures. Measurement 2021, 177, 109313. [Google Scholar] [CrossRef]
- Oh, B.K.; Park, H.S.; Glisic, B. Prediction of Long-Term Strain in Concrete Structure Using Convolutional Neural Networks, Air Temperature and Time Stamp of Measurements. Autom. Constr. 2021, 126, 103665. [Google Scholar] [CrossRef]
- Jiang, H.; Wan, C.; Yang, K.; Ding, Y.; Xue, S. Continuous Missing Data Imputation with Incomplete Dataset by Generative Adversarial Networks–Based Unsupervised Learning for Long-Term Bridge Health Monitoring. Struct. Health Monit. 2022, 21, 1093–1109. [Google Scholar] [CrossRef]
- Fan, G.; He, Z.; Li, J. Structural Dynamic Response Reconstruction Using Self-Attention Enhanced Generative Adversarial Networks. Eng. Struct. 2023, 276, 115334. [Google Scholar] [CrossRef]
- Zhuang, Y.; Qin, J.; Chen, B.; Dong, C.; Xue, C.; Easa, S.M. Data Loss Reconstruction Method for a Bridge Weigh-in-Motion System Using Generative Adversarial Networks. Sensors 2022, 22, 858. [Google Scholar] [CrossRef] [PubMed]
- Hwang, D.; Kim, S.; Kim, H.K. Long-Term Damping Characteristics of Twin Cable-Stayed Bridge under Environmental and Operational Variations. J. Bridge Eng. 2021, 26, 04021062. [Google Scholar] [CrossRef]
- Bocian, M.; Nikitas, N.; Kalybek, M.; Kużawa, M.; Hawryszków, P.; Bień, J.; Onysyk, J.; Biliszczuk, J. Dynamic Performance Verification of the Rędziński Bridge Using Portable Camera-Based Vibration Monitoring Systems. Archiv. Civ. Mech. Eng. 2022, 23, 40. [Google Scholar] [CrossRef]
- Nikitas, N.; Macdonald, J.H.; Jakobsen, J.B. Identification of Flutter Derivatives from Full-Scale Ambient Vibration Measurements of the Clifton Suspension Bridge. Wind. Struct. 2011, 14, 221–238. [Google Scholar] [CrossRef]
- Yang, Y.B.; Liu, Y.H.; Guo, D.Z.; Zhou, J.T.; Liu, Y.Z.; Xu, H. Scanning the Vertical and Radial Frequencies of Curved Bridges by a Single-Axle Vehicle with Two Orthogonal Degrees of Freedom. Eng. Struct. 2023, 283, 115939. [Google Scholar] [CrossRef]
- Yang, Y.B.; Cheng, M.C.; Chang, K.C. Frequency variation in vehicle-bridge interaction systems. Int. J. Str. Stab. Dyn. 2013, 13, 1350019. [Google Scholar] [CrossRef]
- Liu, K.-H.; Xie, T.-Y.; Cai, Z.-K.; Chen, G.-M.; Zhao, X.-Y. Data-Driven Prediction and Optimization of Axial Compressive Strength for FRP-Reinforced CFST Columns Using Synthetic Data Augmentation. Eng. Struct. 2024, 300, 117225. [Google Scholar] [CrossRef]
- Al-Bukhaiti, K.; Yanhui, L.; Shichun, Z.; Daguang, H. Based on BP Neural Network: Prediction of Interface Bond Strength between CFRP Layers and Reinforced Concrete. Pract. Period. Struct. Des. Constr. 2024, 29, 04023067. [Google Scholar] [CrossRef]
- Zheng, X.-W.; Zhou, S.-C.; Lv, H.-L.; Wu, Y.-Z.; Wang, H.; Zhou, Y.-B.; Fan, H. Hybrid Physics-BP Neural Network-Based Strength Degradation Model of Corroded Reinforcements under the Simulated Colliery Environment. Structures 2023, 50, 524–537. [Google Scholar] [CrossRef]
- Wang, H.; Wu, H.; Hu, L.; Zhang, C. Analysis and Predictive Evaluation of Mechanical Properties of Steel Anchor Box for High-Speed-Railway Cable-Stayed Bridge. Appl. Sci. 2023, 13, 5575. [Google Scholar] [CrossRef]
- Yang, Y.B.; Lin, C.W. Vehicle–Bridge Interaction Dynamics and Potential Applications. J. Sound Vib. 2005, 284, 205–226. [Google Scholar] [CrossRef]
- Paultre, P.; Chaallal, O.; Proulx, J. Bridge Dynamics and Dynamic Amplification Factors—A Review of Analytical and Experimental Findings. Can. J. Civ. Eng. 1992, 19, 260–278. [Google Scholar] [CrossRef]
- Wang, Y.-M.; Elhag, T.M.S. A Comparison of Neural Network, Evidential Reasoning and Multiple Regression Analysis in Modelling Bridge Risks. Expert Syst. Appl. 2007, 32, 336–348. [Google Scholar] [CrossRef]
- Gkoktsi, K.; Bono, F.; Tirelli, D. Effectiveness of Drive-By Monitoring in Short-Span Bridges: A Real-Scale Experimental Evaluation. Struct. Control. Health Monit. 2024, 2024, 3509941. [Google Scholar] [CrossRef]
- Dassault Systèmes. Abaqus 6.11 Analysis User’s Manual; Dassault Systemes Simulia Corporation: Providence, RI, USA, 2011. [Google Scholar]
- Yang, Y.B.; Li, Y.C.; Chang, K.C. Effect of Road Surface Roughness on the Response of a Moving Vehicle for Identification of Bridge Frequencies. Interact. Multiscale Mech. 2012, 5, 347–368. [Google Scholar] [CrossRef]
- Lu, X.; Kim, C.-W.; Chang, K.-C. Finite Element Analysis Framework for Dynamic Vehicle-Bridge Interaction System Based on ABAQUS. Int. J. Str. Stab. Dyn. 2020, 20, 2050034. [Google Scholar] [CrossRef]
- MATLAB. Signal Processing Toolbox (Version R2022a). MathWorks. Available online: https://www.mathworks.com/help/signal/ref/highpass.html#mw_dcf4bbd2-1e29-4f0f-819f-39d872f77a14_seealso (accessed on 29 July 2024).
- Biggs, J.M. Introduction to Structural Dynamics; McGraw-Hill: New York, NY, USA, 1964. [Google Scholar]
- He, W.-Y.; Zhu, S. Moving Load-Induced Response of Damaged Beam and Its Application in Damage Localization. J. Vib. Control. 2016, 22, 3601–3617. [Google Scholar] [CrossRef]
- Lei, X.; Sun, L.; Xia, Y. Lost Data Reconstruction for Structural Health Monitoring Using Deep Convolutional Generative Adversarial Networks. Struct. Health Monit. 2021, 20, 2069–2087. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sprung mass (kg) | 1200 |
| Spring stiffness (N/m) | 500,000 |
| Bouncing frequency (Hz) | 3.25 |
| Mass per meter (kg/m) | 4800 |
| EI (N/m2) | 3.33 × 109 |
| First bending frequency (Hz) | 2.08 |
| Second bending frequency (Hz) | 8.33 |
| Length (m) | 25 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, X.; Sun, L.; Xia, Y. Reconstruction of High-Frequency Bridge Responses Based on Physical Characteristics of VBI System with BP-ANN. Appl. Sci. 2024, 14, 6757. https://doi.org/10.3390/app14156757
Lu X, Sun L, Xia Y. Reconstruction of High-Frequency Bridge Responses Based on Physical Characteristics of VBI System with BP-ANN. Applied Sciences. 2024; 14(15):6757. https://doi.org/10.3390/app14156757
Chicago/Turabian StyleLu, Xuzhao, Limin Sun, and Ye Xia. 2024. "Reconstruction of High-Frequency Bridge Responses Based on Physical Characteristics of VBI System with BP-ANN" Applied Sciences 14, no. 15: 6757. https://doi.org/10.3390/app14156757