
Design and Implementation of a MIMO Integral Resonant Control for Active Vibration Control of Pedestrian Structures



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. System Modeling and Control Structure
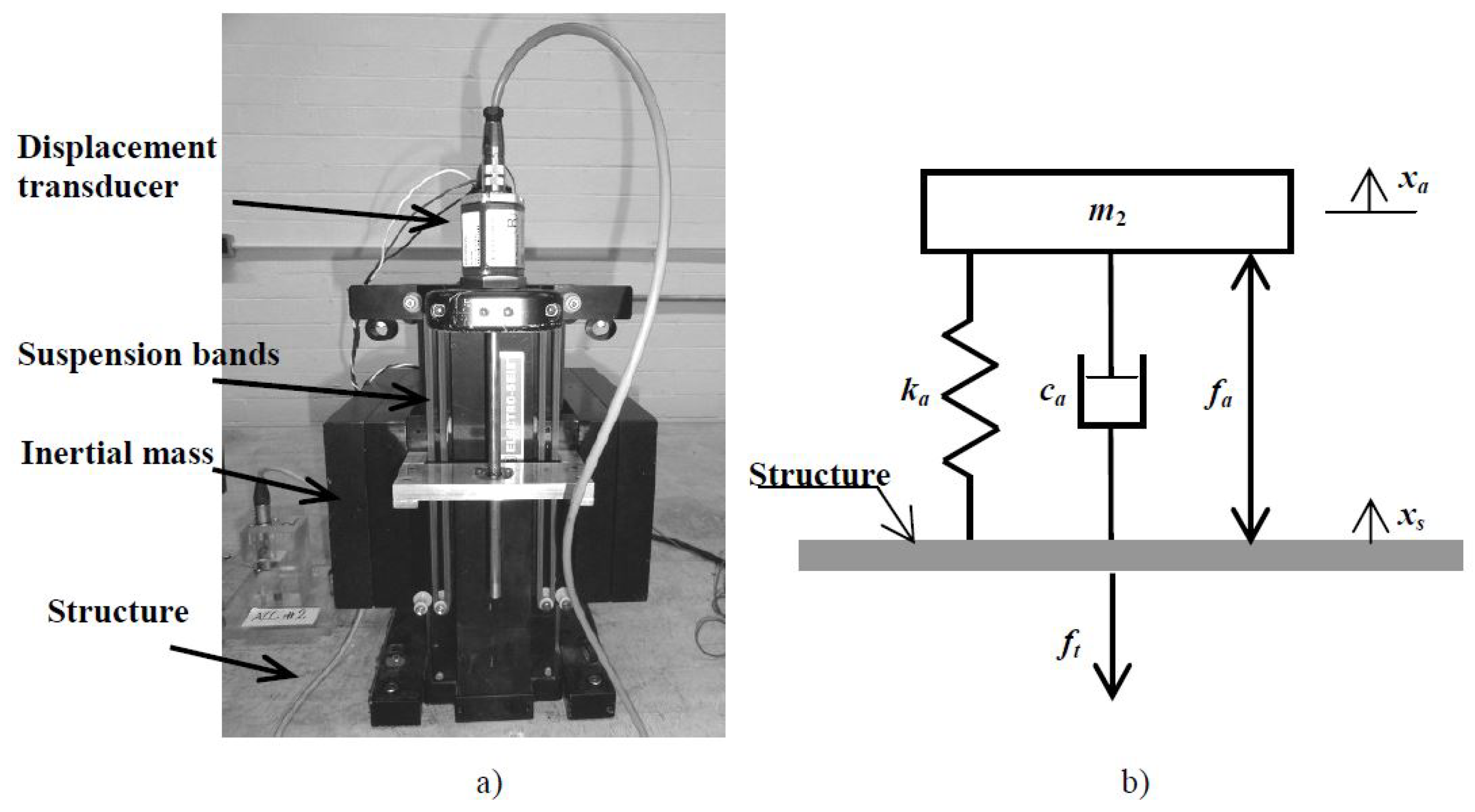
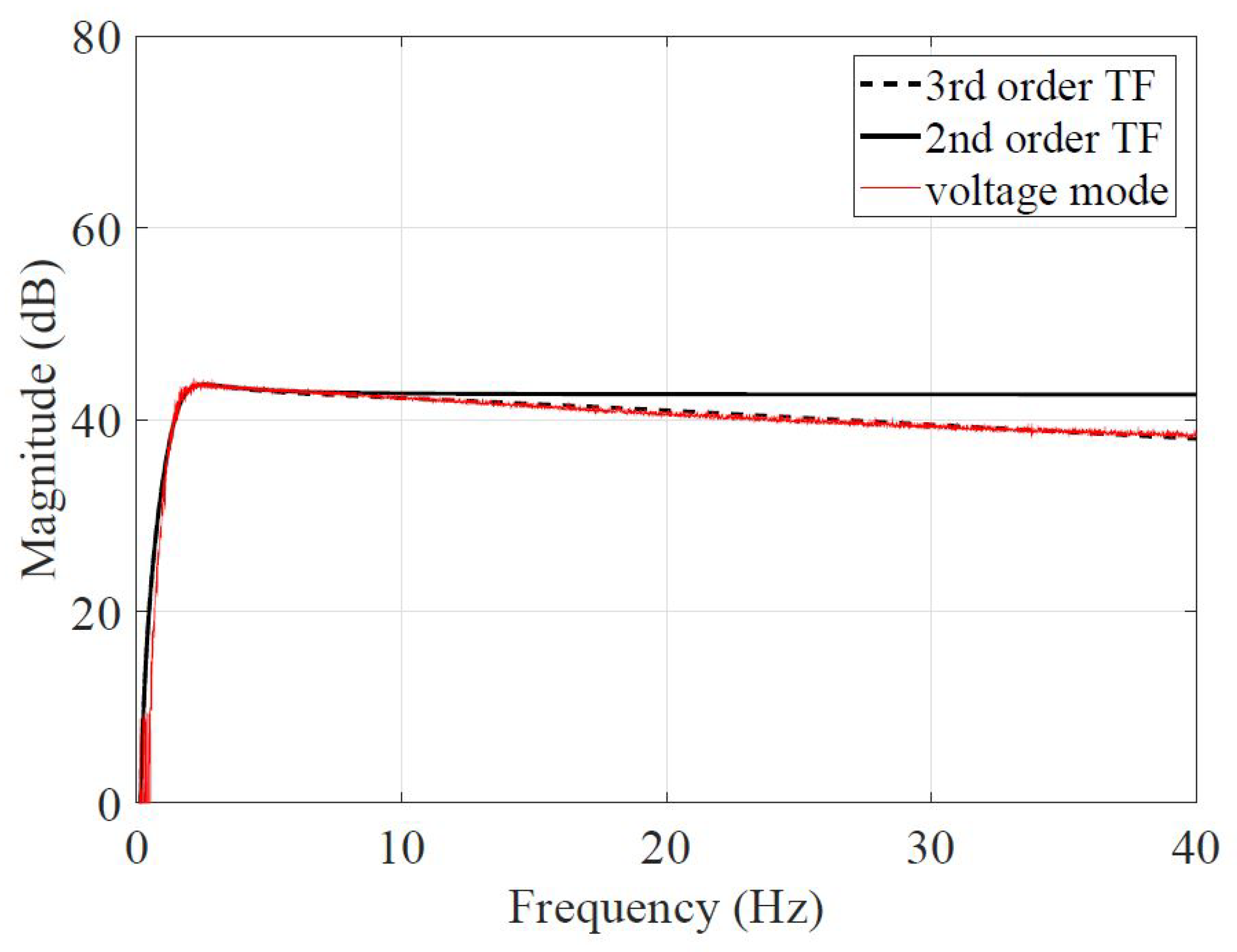
2.1. Parametric System Model
2.2. Proposed Control Scheme
3. Design Methodology Based on the Common Framework
- Identifications and finite-element (FE) model calibration;
- Define the performance index (PI);
- Define the strategy to find the optimal controller;
- Obtain the optimal controller.
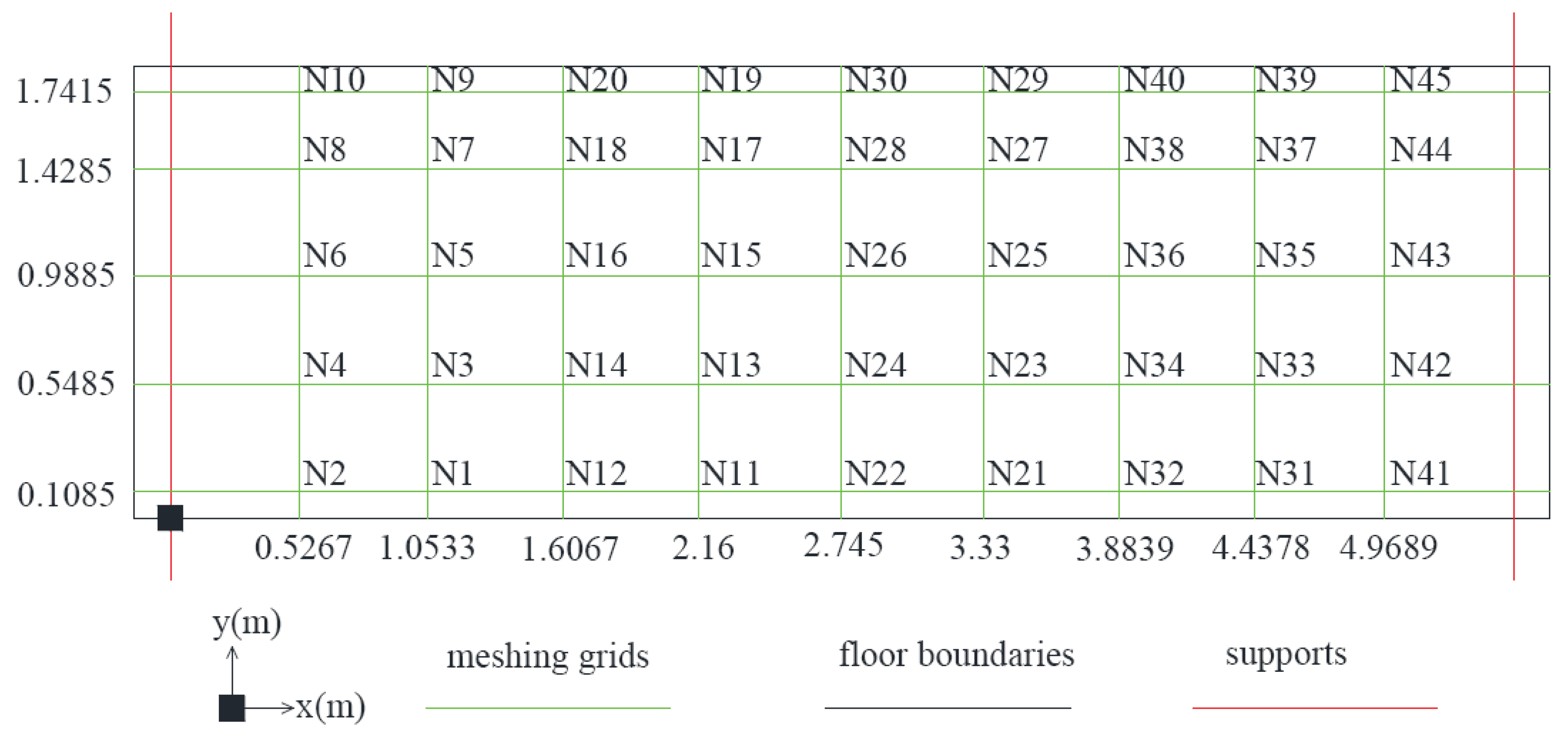
3.1. Identifications and FE Model Calibration
- N16: , , rad/s and ;
- N22: , , rad/s and .
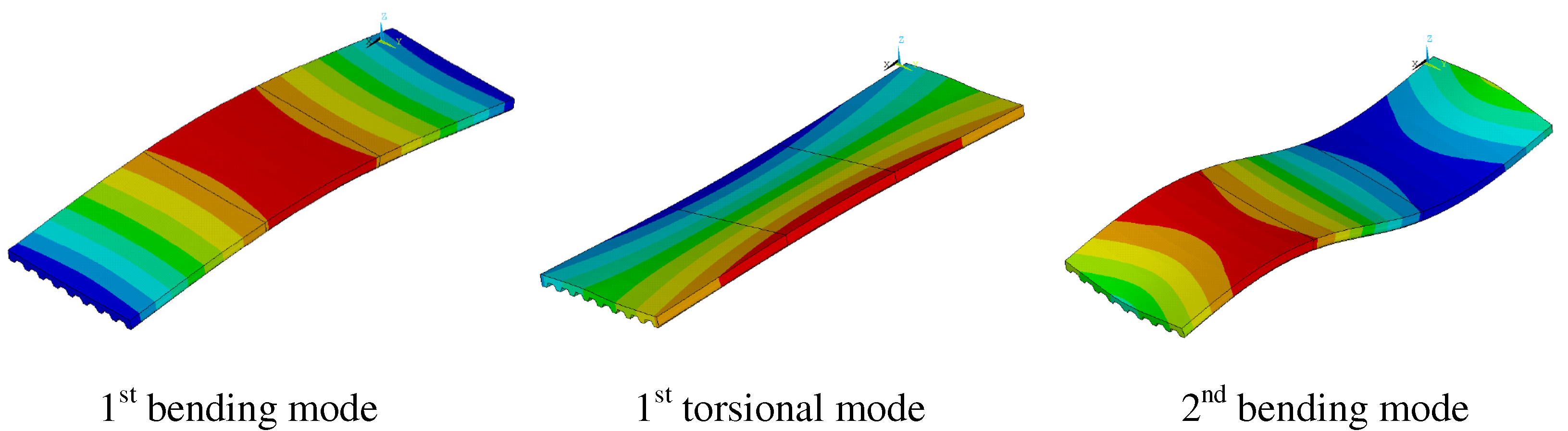
- Natural frequencies (): rad/s, rad/s, rad/s, rad/s, , and rad/s.
- Damping ratios (): , , , , , and .
- Mode shape ():
- -
- Node N16: , , , , , and .
- -
- Node N22: , , , , , and .
3.2. Performance Index
3.3. Controller Optimization
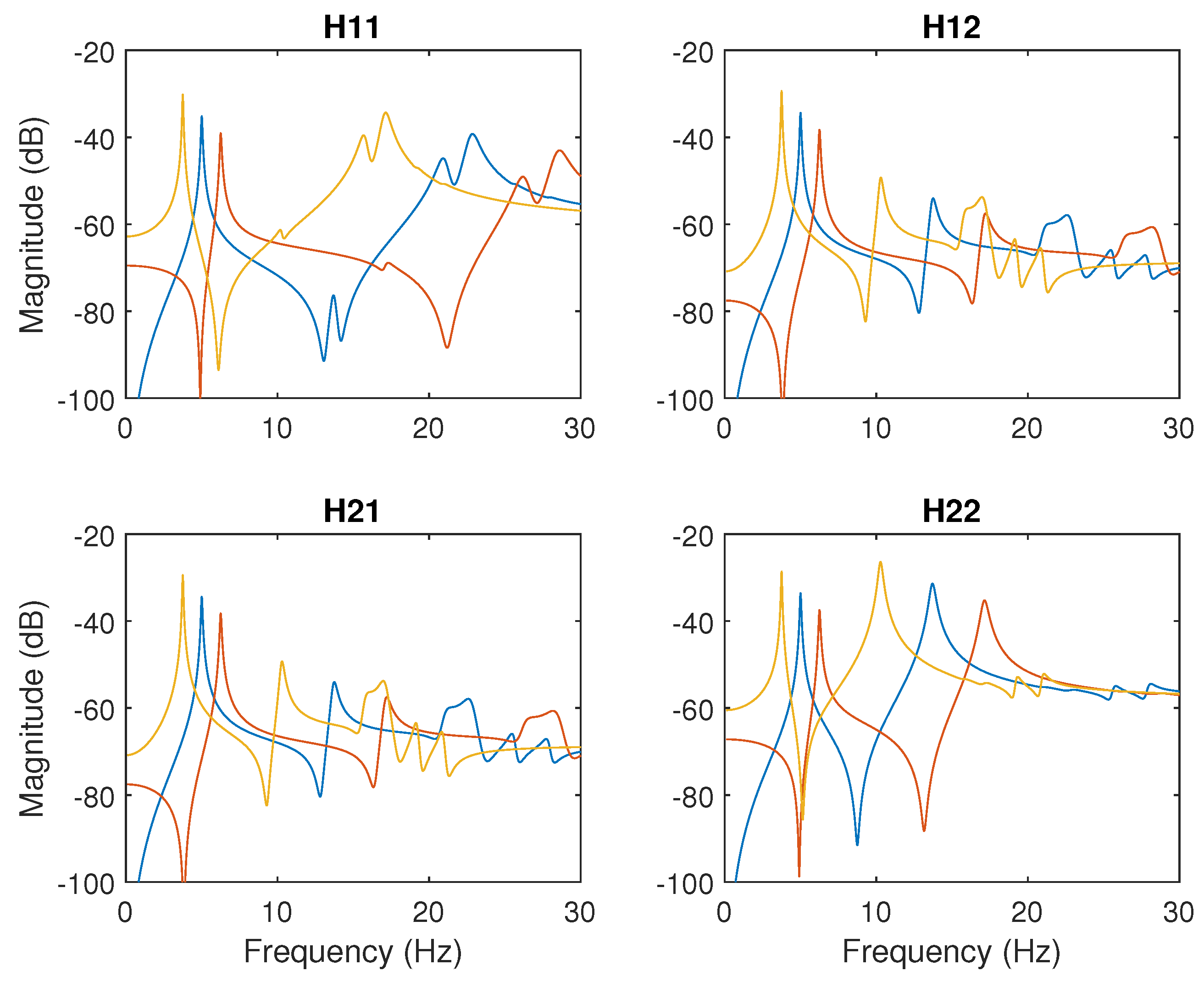
- A variation of in the natural frequencies of the system was considered.
- The peak values of the FRFs associated with nodes N16 and N22 across the frequency range of 0 Hz to 15 Hz were obtained with the MATLAB function.
- In each optimization, the real part of the closest pole to the imaginary axis was calculated. If this value is greater than zero, the value of the magnitude is penalized.
- X = fminsearch (FUN, X0) was configured as follows: FUN is the magnitude obtained with , and the variable to optimize is X, being , , , and . The initial conditions were , which guaranteed the stability of the closed-loop system.
- ;
- .
3.4. Robust Analysis: Simulation Results
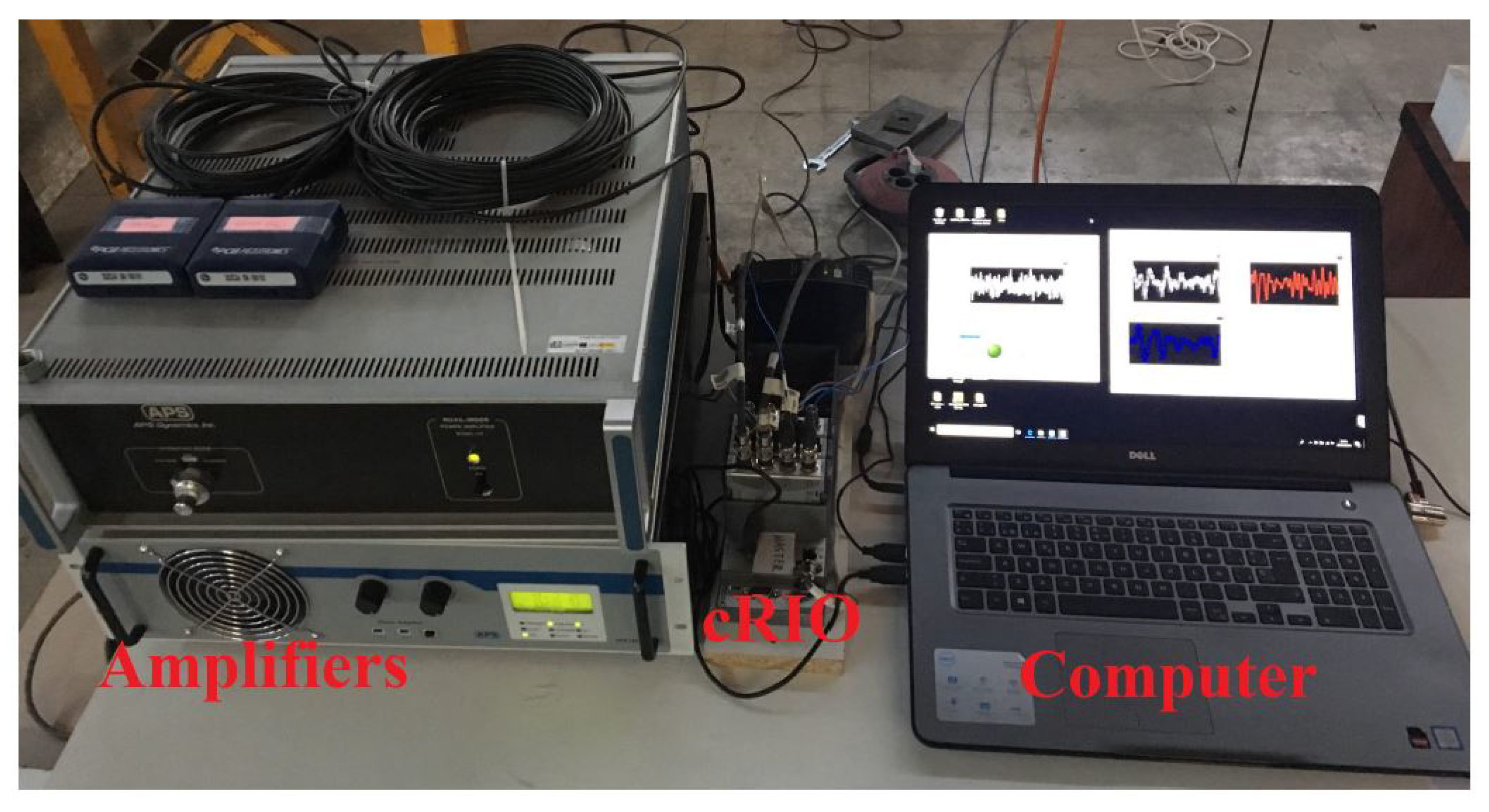
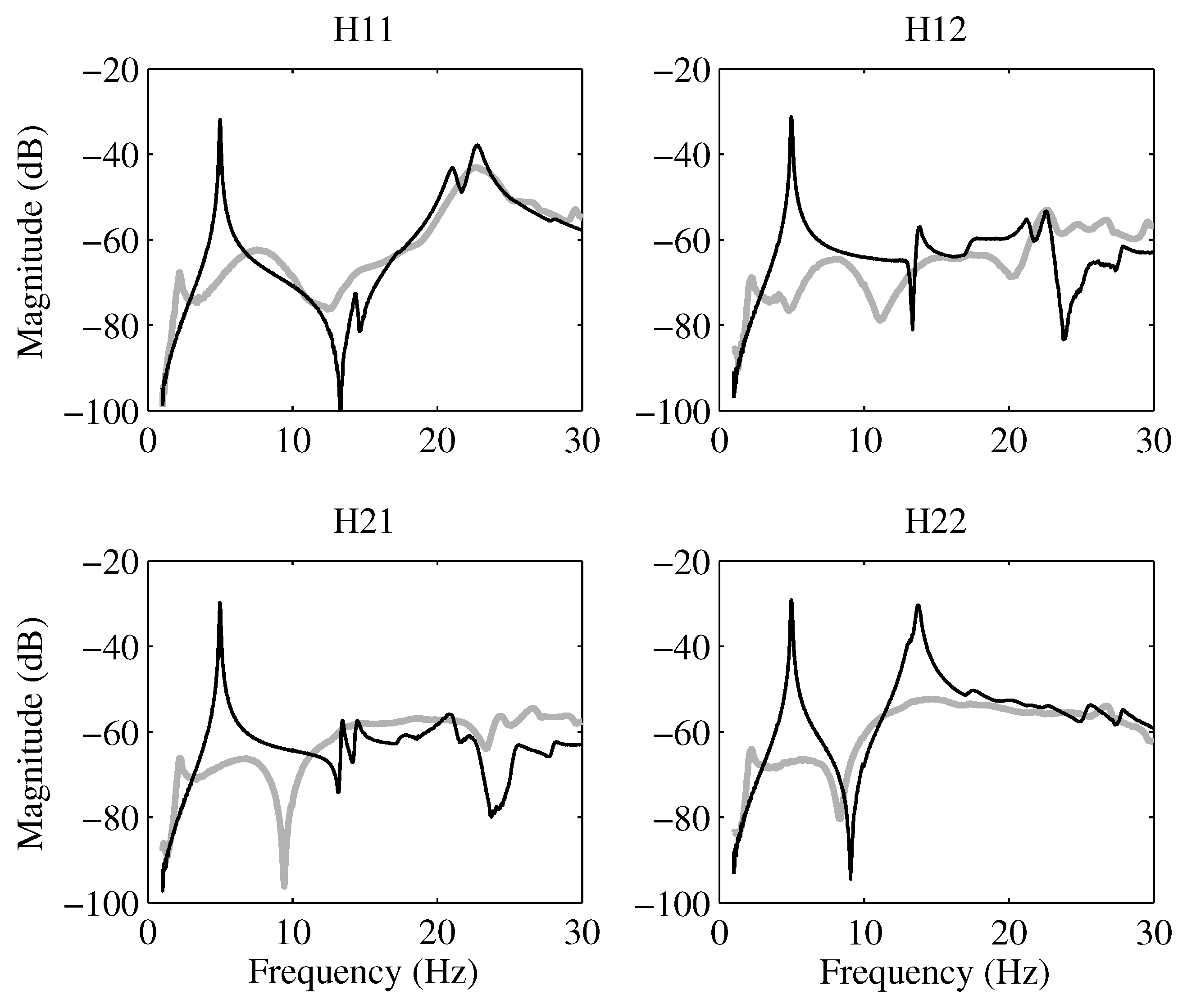
4. Experimental Results
5. Conclusions
- The controller’s resilience against spillover effects, which has been tested in experiments by impact perturbation, which excites higher vibration modes.
- The robustness to system variations, which has been illustrated in the simulation results.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ebrahimpour, A.; Sack, R.L. A review of vibration serviceability criteria for floor structures. Comput. Struct. 2005, 83, 2488–2494. [Google Scholar] [CrossRef]
- Fanning, P.J.; Healy, P.; Pavic, A. Pedestrian Bridge Vibration Serviceability: A Case Study in Testing and Simulation. Adv. Struct. Eng. 2010, 13, 861–873. [Google Scholar] [CrossRef]
- Bouzari, N.; Van Engelen, N.; Cheng, S. Evaluation of Pedestrian-Induced In-Service Building Floor Performance Based on Short-Term Monitoring. J. Perform. Constr. Facil. 2023, 37, 04023045. [Google Scholar] [CrossRef]
- Wang, Z.; Song, L.; Cheng, Z.; Yang, H.; Wen, J.; Qi, M. Finite Element Model for Vibration Serviceability Evaluation of a Suspended Floor with and without Tuned Mass Dampers. Buildings 2023, 13, 309. [Google Scholar] [CrossRef]
- Avci, O.; Catbas, F.N. Editorial: Human-Induced Excitations and Vibrations Serviceability of Civil Engineering Structures. Front. Built Environ. 2022, 8, 846351. [Google Scholar] [CrossRef]
- Fujino, Y.; Siringoringo, D. Vibration Mechanisms and Controls of Long-Span Bridges: A Review. Struct. Eng. Int. 2013, 23, 248–268. [Google Scholar] [CrossRef]
- Chen, J.; Han, Z.; Xu, R. Effects of human-induced load models on tuned mass damper in reducing floor vibration. Adv. Struct. Eng. 2019, 22, 2449–2463. [Google Scholar] [CrossRef]
- Shi, W.; Wang, L.; Lu, Z.; Zhang, Q. Application of an Artificial Fish Swarm Algorithm in an Optimum Tuned Mass Damper Design for a Pedestrian Bridge. Appl. Sci. 2018, 8, 175. [Google Scholar] [CrossRef]
- Caetano, E.; Cunha, A.; Magalhães, F.; Moutinho, C. Studies for controlling human-induced vibration of the Pedro e Inês footbridge, Portugal. Part 1: Assessment of dynamic behaviour. Eng. Struct. 2010, 32, 1069–1081. [Google Scholar] [CrossRef]
- Wang, C.; Shi, W. Optimal Design and Application of a Multiple Tuned Mass Damper System for an In-Service Footbridge. Sustainability 2019, 11, 2801. [Google Scholar] [CrossRef]
- Xie, Z.; Zhang, Y. Dynamic Response Measurement and Finite Element Analysis of Large-Span Pedestrian Corridor. Buildings 2023, 13, 2857. [Google Scholar] [CrossRef]
- Li, J.; Liu, X. Human-Induced Vibration Analysis and Reduction Design for Super Long Span Pedestrian Arch Bridges with Tuned Mass Dampers. Appl. Sci. 2023, 13, 8263. [Google Scholar] [CrossRef]
- Wen, Q.; Hua, X.G.; Chen, Z.Q.; Yang, Y.; Niu, H.W. Control of Human-Induced Vibrations of a Curved Cable-Stayed Bridge: Design, Implementation, and Field Validation. J. Bridge Eng. 2016, 21, 04016028. [Google Scholar] [CrossRef]
- Zhou, L.; Wan, S. Vibration Control of Footbridges Based on Local Resonance Band Gaps. J. Struct. Eng. 2022, 148, 04022137. [Google Scholar] [CrossRef]
- Liu, K.; Shi, Q.; Liu, Y.; Liu, L.; Zhou, F. Investigation of an improved tuned liquid column gas damper for the vertical vibration control. Mech. Syst. Signal Process. 2023, 196, 110340. [Google Scholar] [CrossRef]
- Wang, L.; Nagarajaiah, S.; Shi, W.; Zhou, Y. Semi-active control of walking-induced vibrations in bridges using adaptive tuned mass damper considering human-structure-interaction. Eng. Struct. 2021, 244, 112743. [Google Scholar] [CrossRef]
- Shi, W.; Wang, L.; Lu, Z.; Gao, H. Study on Adaptive-Passive and Semi-Active Eddy Current Tuned Mass Damper with Variable Damping. Sustainability 2018, 10, 99. [Google Scholar] [CrossRef]
- Wang, L.; Nagarajaiah, S.; Zhou, Y.; Shi, W. Experimental study on adaptive-passive tuned mass damper with variable stiffness for vertical human-induced vibration control. Eng. Struct. 2023, 280, 115714. [Google Scholar] [CrossRef]
- Hudson, M.; Reynolds, P. Implementation considerations for active vibration control in the design of floor structures. Eng. Struct. 2012, 44, 334–358. [Google Scholar] [CrossRef]
- Wani, Z.R.; Tantray, M.; Noroozinejad Farsangi, E.; Nikitas, N.; Noori, M.; Samali, B.; Yang, T. A Critical Review on Control Strategies for Structural Vibration Control. Annu. Rev. Control. 2022, 54, 103–124. [Google Scholar] [CrossRef]
- Terrill, R.; Bäumer, R.; Van Nimmen, K.; Van den Broeck, P.; Starossek, U. Twin Rotor Damper for Human-Induced Vibrations of Footbridges. J. Struct. Eng. 2020, 146, 04020119. [Google Scholar] [CrossRef]
- Liu, X.; Schauer, T.; Goldack, A.; Schlaich, M. Multi-Modal Active Vibration Control of a Lightweight Stress-Ribbon Footbridge Based on Subspace Identification. IFAC-PapersOnLine 2017, 50, 7058–7063. [Google Scholar] [CrossRef]
- Wang, L.; Zhou, Y.; Shi, W. Dynamic test, monitoring and active control of non-resonant running-induced vibration for floor structure. Structures 2024, 63, 106348. [Google Scholar] [CrossRef]
- Alujević, N.; Zhao, G.; Depraetere, B.; Sas, P.; Pluymers, B.; Desmet, W. Optimal vibration control using inertial actuators and a comparison with tuned mass dampers. J. Sound Vib. 2014, 333, 4073–4083. [Google Scholar] [CrossRef]
- Chesné, S.; Milhomem, A.; Collette, C. Enhanced Damping of Flexible Structures Using Force Feedback. J. Guid. Control. Dyn. 2016, 39, 1654–1658. [Google Scholar] [CrossRef]
- Ramírez-Senent, J.; Gallegos-Calderón, C.; García-Palacios, J.H.; Díaz, I.M. Active control of human-induced vibrations on lightweight structures via electrodynamic actuator dynamics inversion. J. Vib. Control. 2024, 30, 88–103. [Google Scholar] [CrossRef]
- Xue, K.; Igarashi, A.; Kachi, T. Independent modal space phase-lead velocity feedback control of floor vibration. Struct. Control. Health Monit. 2022, 29, e2954. [Google Scholar] [CrossRef]
- Ahmadi, M.W. Preventing stroke saturation of inertial actuators used for active vibration control of floor structures. Struct. Control. Health Monit. 2020, 27, e2546. [Google Scholar] [CrossRef]
- Hanagan, L.M.; Kulasekere, E.C.; Walgama, K.S.; Premaratne, K. Optimal Placement of Actuators and Sensors for Floor Vibration Control. J. Struct. Eng. 2000, 126, 1380–1387. [Google Scholar] [CrossRef]
- Pereira, E.; Díaz, I.M.; Hudson, E.J.; Reynolds, P. Optimal control-based methodology for active vibration control of pedestrian structures. Eng. Struct. 2014, 80, 153–162. [Google Scholar] [CrossRef]
- Nyawako, D.S.; Reynolds, P. Comparative studies of global and targeted control of walkway bridge resonant frequencies. J. Vib. Control. 2016, 24, 1670–1686. [Google Scholar] [CrossRef]
- Camacho-Gómez, C.; Wang, X.; Pereira, E.; Díaz, I.; Salcedo-Sanz, S. Active vibration control design using the Coral Reefs Optimization with Substrate Layer algorithm. Eng. Struct. 2018, 157, 14–26. [Google Scholar] [CrossRef]
- Zamani, A.A.; Etedali, S. Optimal fractional-order PID control design for time-delayed multi-input multi-output seismic-excited structural system. J. Vib. Control. 2021, 29, 802–819. [Google Scholar] [CrossRef]
- Díaz, I.M.; Pereira, E.; Reynolds, P. Integral resonant control scheme for cancelling human-induced vibrations in light-weight pedestrian structures. Struct. Control. Health Monit. 2010, 19, 55–69. [Google Scholar] [CrossRef]
- Wang, X.; Pereira, E.; García-Palacios, J.H.; Díaz, I.M. A general vibration control methodology for human-induced vibrations. Struct. Control. Health Monit. 2019, 26, e2406. [Google Scholar] [CrossRef]
- Bhikkaji, B.; Moheimani, S.O.R.; Petersen, I.R. A Negative Imaginary Approach to Modeling and Control of a Collocated Structure. IEEE/ASME Trans. Mechatronics 2012, 17, 717–727. [Google Scholar] [CrossRef]
- Gawronski, W.K. Advanced Structural Dynamics and Active Control of Structures; Springer: New York, NY, USA, 2004. [Google Scholar] [CrossRef]
- Preumont, A. Vibration Control of Active Structures; Springer International Publishing: Berlin/Heidelberg, Germany, 2018. [Google Scholar] [CrossRef]
- Aphale, S.S.; Fleming, A.J.; Moheimani, S.O.R. Integral resonant control of collocated smart structures. Smart Mater. Struct. 2007, 16, 439–446. [Google Scholar] [CrossRef]
- Kandil, A.; Hamed, Y.S. Integral Resonant Controller for Suppressing Car’s Oscillations and Eliminating its Inherent Jump Phenomenon. Eur. J. Pure Appl. Math. 2023, 16, 2729–2750. [Google Scholar] [CrossRef]
- Loṕez-Romero, M.; Santos Peñas, M. A Positive Position Feedback controller for vibration control of wind turbines. Energy Rep. 2023, 9, 1342–1353. [Google Scholar] [CrossRef]
- Multiphysics, A. Release 2022 R2, Help System; ANSYS Inc.: Canonsburg, PA, USA, 2022. [Google Scholar]
- McKelvey, T.; Akcay, H.; Ljung, L. Subspace-based multivariable system identification from frequency response data. IEEE Trans. Autom. Control. 1996, 41, 960–979. [Google Scholar] [CrossRef]
- ISO2631-1:1997; Mechanical Vibration and Shock. Evaluation of Human Exposure to Whole-Body Vibration Part 1: General Requirements. International Organization for Standardization: Geneva, Switzerland, 1997.
- Patra, S.; Lanzon, A. Stability Analysis of Interconnected Systems With “Mixed” Negative-Imaginary and Small-Gain Properties. IEEE Trans. Autom. Control. 2011, 56, 1395–1400. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pereira, E.; Wang, X.; Díaz, I.M.; Aphale, S.S. Design and Implementation of a MIMO Integral Resonant Control for Active Vibration Control of Pedestrian Structures. Appl. Sci. 2024, 14, 6784. https://doi.org/10.3390/app14156784
Pereira E, Wang X, Díaz IM, Aphale SS. Design and Implementation of a MIMO Integral Resonant Control for Active Vibration Control of Pedestrian Structures. Applied Sciences. 2024; 14(15):6784. https://doi.org/10.3390/app14156784
Chicago/Turabian StylePereira, Emiliano, Xidong Wang, Iván M. Díaz, and Sumeet S. Aphale. 2024. "Design and Implementation of a MIMO Integral Resonant Control for Active Vibration Control of Pedestrian Structures" Applied Sciences 14, no. 15: 6784. https://doi.org/10.3390/app14156784
APA StylePereira, E., Wang, X., Díaz, I. M., & Aphale, S. S. (2024). Design and Implementation of a MIMO Integral Resonant Control for Active Vibration Control of Pedestrian Structures. Applied Sciences, 14(15), 6784. https://doi.org/10.3390/app14156784