
Suboptimal Analysis of the Differential System of the Conceptual Trailer Air Brake Valve



Abstract
Featured Application
Abstract
1. Introduction
- Propose the scope of modification of the existing brake valve necessary to realize the design of the conceptual differential valve;
- Develop a mathematical model of the differentiating part of the valve and indicate how to solve it;
- Carry out multivariate calculations to collect a group of results;
- Based on the group of results, conduct a suboptimal functional analysis to determine the variant that meets the conditions set.
2. Materials and Methods
2.1. Object of Analysis
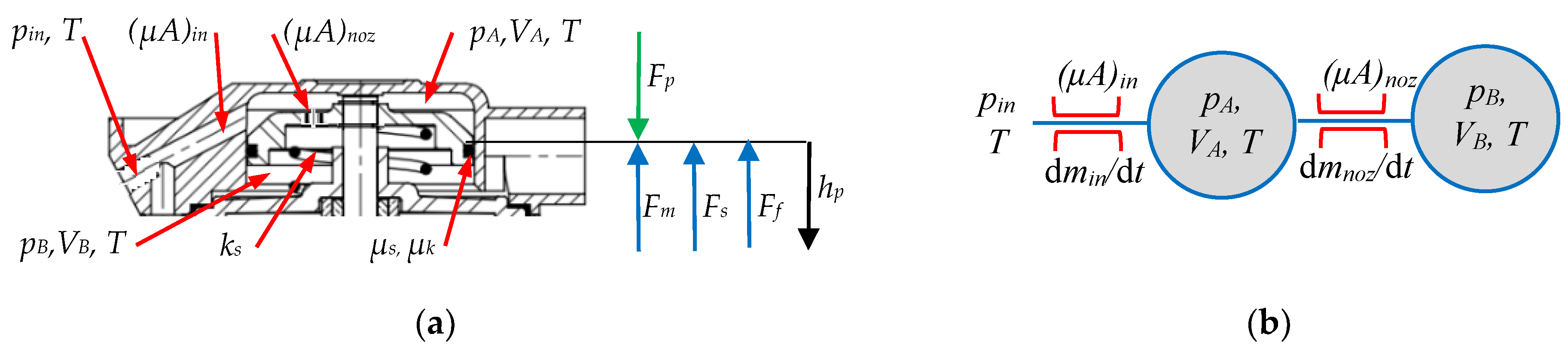
2.2. Mathematical Model
- The mechanical system is perfectly rigid;
- The pneumatic system is perfectly tight;
- The position of the piston depends on the balance of forces acting in the system;
- The air pressure is distributed uniformly in the volumes under analysis;
- The state of the air in the volumes has a constant temperature and depends on time and the inlet–outlet mass balance;
- The flow was considered isentropic in an adiabatic sheath;
- The spring generates a force due to its stiffness and deflection and preload;
- Friction depends on the movement of the piston and has different components;
- Flow-limiting elements open and close gradually.
- Fitness function necessary for optimization;
- Population of all chromosomes;
- Selection from the population of chromosomes that will reproduce;
- Crossing over chromosomes to produce the next generation of chromosomes;
- Random mutation in the new generation of chromosomes.
2.3. Initial and Boundary Conditions
2.4. Method to Find a Solution
3. Results
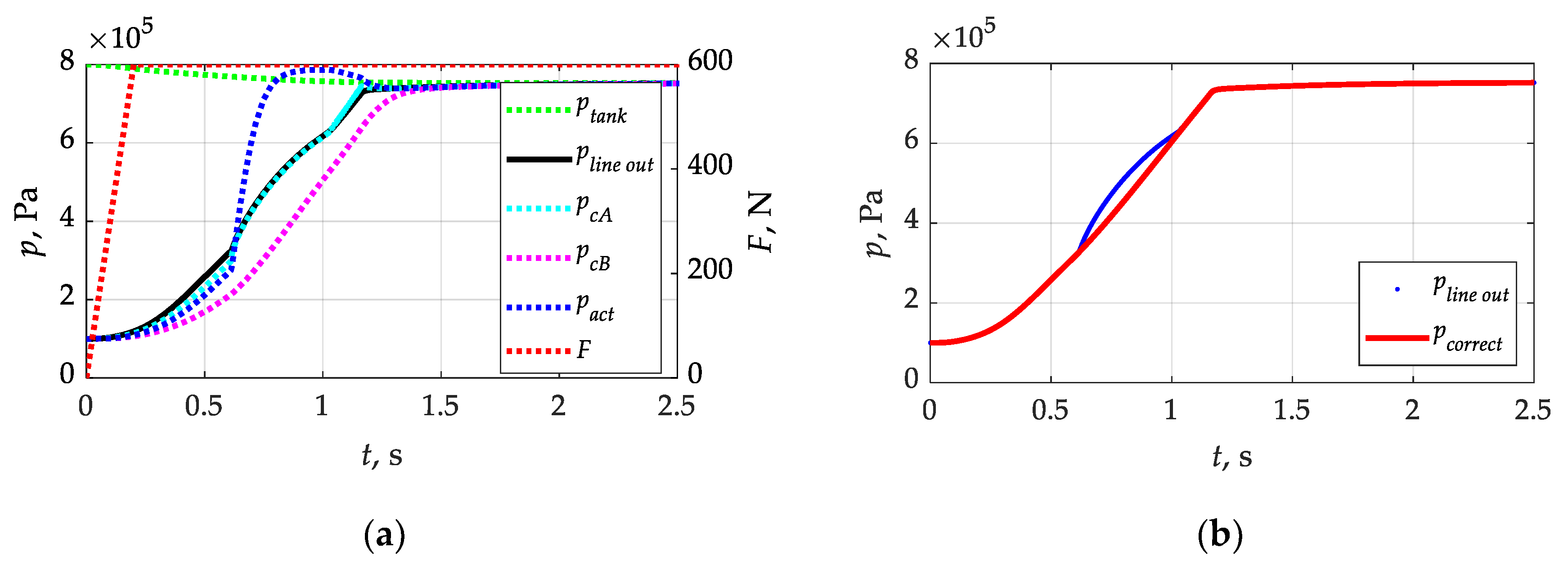
3.1. Determination of Characteristic Operating Times and Maximum Displacement of the Valve Piston
3.2. Suboptimal Functional Analysis
- Possibly short opening time and short closing time (opt_1);
- Possibly short opening time and long closing time (opt_2).
4. Future Research
5. Conclusions
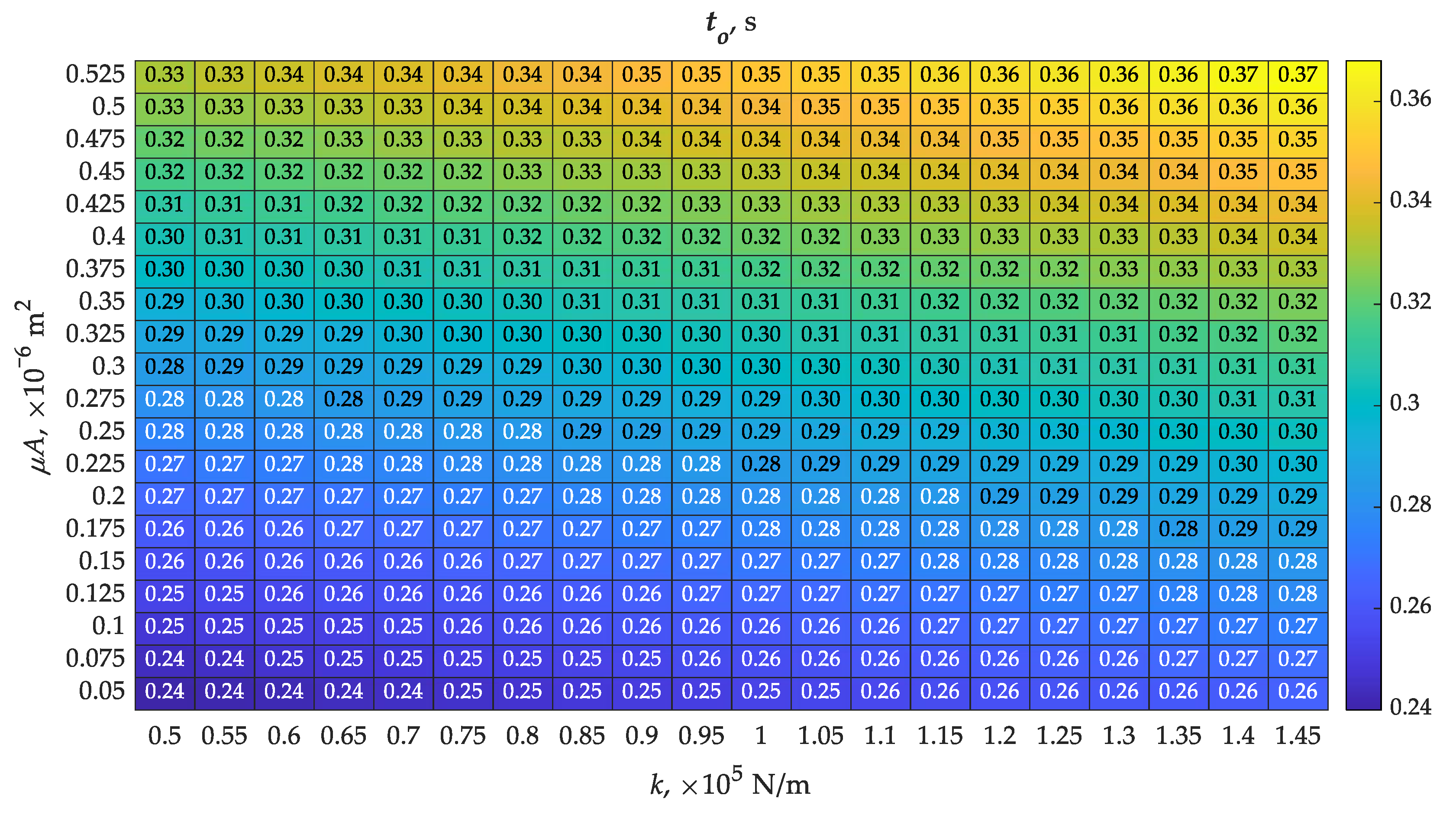
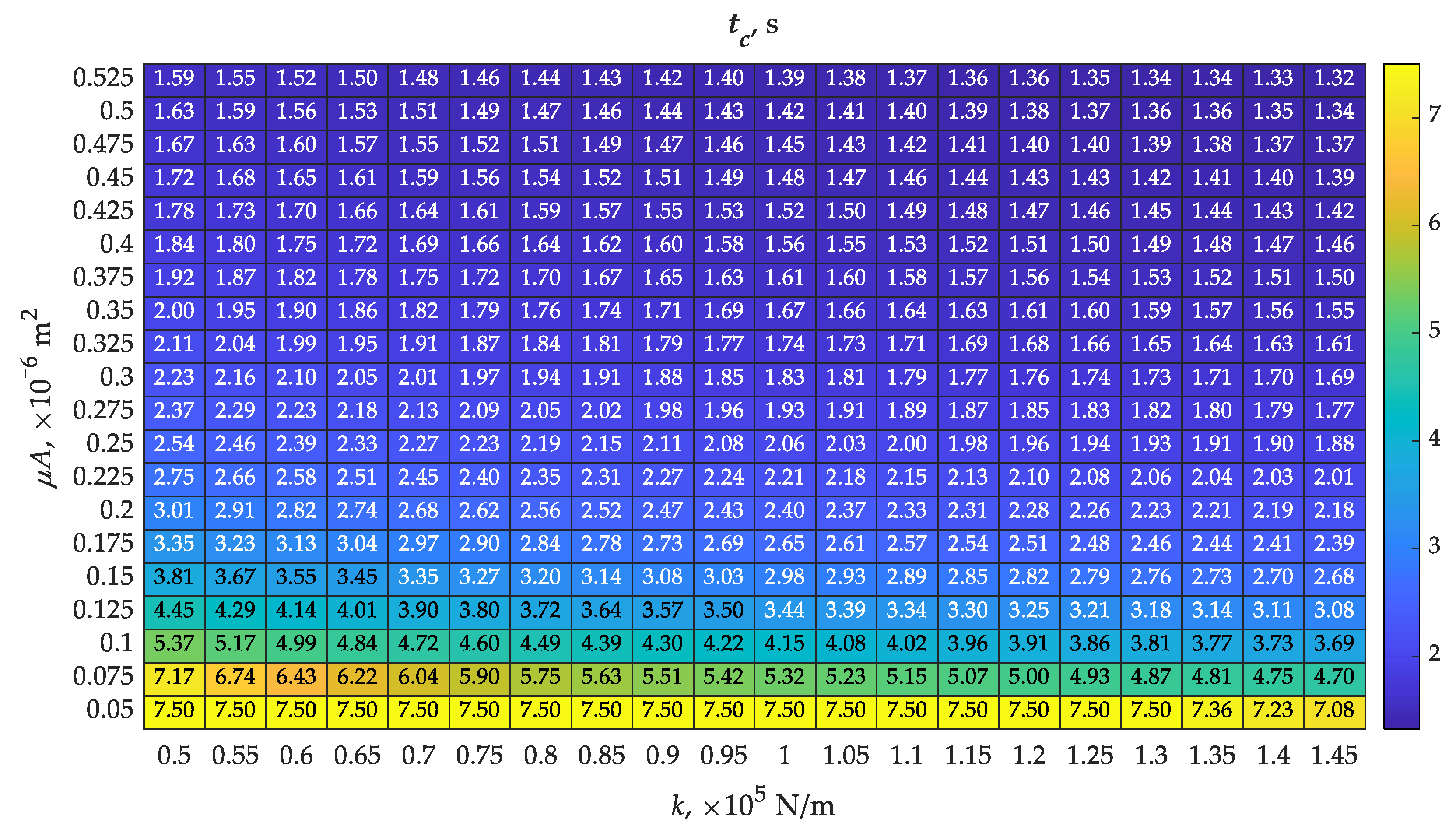
- The smallest spring stiffness analyzed of 0.5 × 105 N/m showed an opening time of 0.24 (0.33) s and a valve closing time of 7.08 (7.5) s depending on the throughput of the piston bore;
- The highest stiffness (1.45 × 105 N/m) resulted in a slight increase in opening time to 0.26 (0.37) s and a marked decrease in closing time to 1.32 (7.08) s, depending on the throughput of the piston bore;
- The smallest piston bore throughput of 0.05 × 10−6 m2 resulted in an opening time of 0.24 (0.36) s and a closing time of 7.08 (7.5) s depending on the spring stiffness;
- The highest piston bore throughput of 0.525 × 10−6 m2 showed a similar opening time of 0.24 (0.33) s with a significant reduction in closing time to 1.32 (1.59) s;
- Not all analyzed configurations were able to achieve a maximum piston displacement (valve opening) of 7.3 mm, which may affect the effectiveness of the valve acceleration mode;
- Different times of accelerating action calculated as the difference of closing and opening times did not guarantee constant efficiency due to different displacements of the piston;
- The optimization carried out using the genetic algorithm yielded results corresponding to its stated purpose but required complementary analysis to select the optimal variant.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ABS | Anti-lock braking system |
| BAS | Brake assistance system |
| CFD | Computational fluid dynamics |
| PWM | Pulse width modulation |
References
- Regulation No 13 of the Economic Commission for Europe of the United Nations (UN/ECE) Uniform Provisions Concerning the Approval of Vehicles of Categories M, N and O with Regard to Braking. Available online: http://data.europa.eu/eli/reg/2016/194/oj (accessed on 5 July 2024).
- Jing, Z.; He, R. Electronic structural improvement and experimental verification of a tractor-semitrailer air brake system. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 2154–2161. [Google Scholar] [CrossRef]
- Cantone, L.; Ottati, A. A simplified pneumatic model for air brake of passenger trains. Railw. Eng. Sci. 2023, 31, 145–152. [Google Scholar] [CrossRef]
- Krichel, S.V.; Sawodny, O. Dynamic modeling of pneumatic transmission lines in Matlab/Simulink. In Proceedings of the International Conference on Fluid Power and Mechatronics, Beijing, China, 17–20 August 2011; IEEE: Beijing, China, 2011; pp. 24–29. [Google Scholar]
- Kamiński, Z.; Kulikowski, K. Determination of the functional and service characteristics of the pneumatic system of an agricultural tractor with mechanical brakes using simulation methods. Eksploat. I Niezawodn. 2015, 17, 355–364. [Google Scholar] [CrossRef]
- Kisiel, M.; Szpica, D.; Czaban, J.; Kӧten, H. Pneumatic brake valves used in vehicle trailers—A review. Eng. Fail. Anal. 2024, 158, 107942. [Google Scholar] [CrossRef]
- Dindorf, R.; Takosoglu, J.; Wos, P. Review of Compressed Air Receiver Tanks for Improved Energy Efficiency of Various Pneumatic Systems. Energies 2023, 16, 4153. [Google Scholar] [CrossRef]
- Kulesza, Z.; Siemieniako, F.; Mikołajczyk, B. Modelowanie zaworu przekaźnikowo-sterującego. Pneumatyka 2008, 1, 31–35. [Google Scholar]
- Kamiński, Z. Mathematical modelling of the trailer brake control valve for simulation of the air brake system of farm tractors equipped with hydraulically actuated brakes. Eksploat. i Niezawodn. 2014, 16, 637–643. [Google Scholar]
- Kulesza, Z.; Siemieniako, F. Modeling the air brake system equipped with the brake and relay valves. Zesz. Nauk. 2010, 24, 5–11. [Google Scholar]
- Li, G.; Wei, X.; Wang, Z.; Bao, H. Study on the Pressure Regulation Method of New Automatic Pressure Regulating Valve in the Electronically Controlled Pneumatic Brake Systems in Commercial Vehicles. Sensors 2022, 22, 4599. [Google Scholar] [CrossRef] [PubMed]
- Kamiński, Z. Symulacyjne i Eksperymentalne Badania Pneumatycznych Układów Hamulcowych Pojazdów Rolniczych Rolniczych; Oficyna Wydawnicza Politechniki Białostockiej: Białystok, Poland, 2012. [Google Scholar]
- Miatluk, M.; Avtuszko, F. Dinamika Pnievmaticeskich i Gidravliceskich Privodov Avtomobilej; M. Maszinostrojenije: Moscov, Russia, 1980. [Google Scholar]
- Beater, P. Pneumatic Drives. System Design, Modelling and Control; Springer: Berlin/Heidelberg, Germany, 2007; ISBN 2006939785. [Google Scholar]
- Szpica, D. Modeling of the operation of a pneumatic differential valve increasing the efficiency of pneumatic brake actuation of road trains. In Proceedings of the Transport Means-Proceedings of the International Conference, Trakai, Lithuania, 3–5 October 2018; Volume 2018, pp. 151–156. [Google Scholar]
- Mystkowski, A. Zastosowanie zaworów różniczkujących w pneumatycznych układach napędowych. Pneumatyka 2004, 3, 21–23. [Google Scholar]
- Kamiński, Z.; Kulikowski, K. Impact of a modified braking valve for static and dynamic characteristics of pneumatic braking systems of agricultural trailers. Int. J. Heavy Veh. Syst. 2021, 28, 291–307. [Google Scholar] [CrossRef]
- Patil, J.N.; Palanivelu, S.; Jindal, A.K. Mathematical model of dual brake valve for dynamic characterization. In Proceedings of the SAE Technical Papers; SAE International: Pune, Maharashtra, India, 2013; Volume 5. [Google Scholar]
- Kumar, E.A.; Gautam, V.; Subramanian, S.C. Performance evaluation of an electro-pneumatic braking system for commercial vehicles. In Proceedings of the ICPCES 2012–2012 2nd International Conference on Power, Control and Embedded Systems, Allahabad, India, 17–19 December 2012. [Google Scholar]
- Topçu, E.E.; Bali, E. Modeling and analysis of an electro-pneumatic brake valve with on-off type solenoid driven by PWM technique. J. Fac. Eng. Archit. Gazi Univ. 2021, 36, 1417–1430. [Google Scholar] [CrossRef]
- Liu, Q.; Guo, G.; Qu, F. The Design and Simulation Analysis of Electromechanical Double Acting Pneumatic Brake Valve; Atlantis Press: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Bao, H.; Wang, Z.; Wei, X.; Li, G. Study on the structural configurations and pressure regulation characteristics of the automatic pressure regulating valve in the electronically controlled pneumatic brake system of commercial vehicles. Appl. Sci. 2021, 11, 10603. [Google Scholar] [CrossRef]
- Subramanian, S.C.; Darbha, S.; Rajagopal, K.R. Modeling the pneumatic subsystem of an s-cam air brake system. J. Dyn. Syst. Meas. Control Trans. ASME 2004, 126, 36–46. [Google Scholar] [CrossRef]
- Yu, W.; Yang, W.; Zhao, F. Investigation of internal nozzle flow, spray and combustion characteristics fueled with diesel, gasoline and wide distillation fuel (WDF) based on a piezoelectric injector and a direct injection compression ignition engine. Appl. Therm. Eng. 2017, 114, 905–920. [Google Scholar] [CrossRef]
- Michalcová, V.; Kotrasová, K. The numerical diffusion effect on the cfd simulation accuracy of velocity and temperature field for the application of sustainable architecture methodology. Sustainability 2020, 12, 10173. [Google Scholar] [CrossRef]
- Cvetkovic, D.; Cosic, I.; Subic, A. Improved performance of the electromagnetic fuel injector solenoid actuator using a modelling approach. Int. J. Appl. Electromagn. Mech. 2008, 27, 251–273. [Google Scholar] [CrossRef]
- Szpica, D.; Mieczkowski, G.; Borawski, A.; Leisis, V.; Diliunas, S.; Pilkaite, T. The computational fluid dynamics (CFD) analysis of the pressure sensor used in pulse-operated low-pressure gas-phase solenoid valve measurements. Sensors 2021, 21, 8287. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; Cheng, X.; Zheng, X.; Chen, H. Reynolds-Averaged Navier-Stokes Equations Describing Turbulent Flow and Heat Transfer Behavior for Supercritical Fluid. J. Therm. Sci. 2021, 30, 191–200. [Google Scholar] [CrossRef]
- Matyushenko, A.A.; Garbaruk, A.V. Adjustment of the k-ω SST turbulence model for prediction of airfoil characteristics near stall. J. Phys. Conf. Ser. 2016, 769, 012082. [Google Scholar] [CrossRef]
- Kisiel, M.; Szpica, D. Evaluating influence of CFD mesh on flow characteristics of pneumatic brake valve differential section. In Proceedings of the Engineering for Rural Development, Jelgava, Latvia, 22–24 May 2024. p. uzupelnic. [Google Scholar]
- Zhang, R.; Peng, J.; Li, H.; Chen, B.; Liu, W.; Huang, Z.; Wang, J. A predictive control method to improve pressure tracking precision and reduce valve switching for pneumatic brake systems. IET Control Theory Appl. 2021, 15, 1389–1403. [Google Scholar] [CrossRef]
- Palanivelu, S.; Patil, J.; Jindal, A.K. Modeling and Optimization of Pneumatic Brake System for Commercial Vehicles by Model Based Design Approach. In Proceedings of the SAE Technical Papers; SAE International: Orlando, FL, USA, 2017; Volume Part F130115. [Google Scholar]
- Korbut, M.; Szpica, D.; Panão, M.R.O. Modelling of piston pneumatic engine operation using the lumped method. Energy Convers. Manag. 2024, 306, 118310. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Futur. Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Chernov, N.N.; Palii, A.V.; Saenko, A.V.; Maevskii, A.M. A Method of Body Shape Optimization for Decreasing the Aerodynamic Drag Force in Gas Flow. Tech. Phys. Lett. 2018, 44, 328–330. [Google Scholar] [CrossRef]
- Gad, A.G. Particle Swarm Optimization Algorithm and Its Applications: A Systematic Review. Arch. Comput. Methods Eng. 2022, 29, 2531–2561. [Google Scholar] [CrossRef]
- Sohrabi, M.K.; Azgomi, H. A Survey on the Combined Use of Optimization Methods and Game Theory. Arch. Comput. Methods Eng. 2020, 27, 59–80. [Google Scholar] [CrossRef]
- Holland, J.H. Genetic algorithms. Sci. Am. 1992, 267, 66–72. [Google Scholar] [CrossRef]
- Mitchell, M. Genetic algorithms: An overview. Complexity 1995, 1, 31–39. [Google Scholar] [CrossRef]
- Cao, Y.J.; Wu, Q.H. Teaching genetic algorithm using MATLAB. Int. J. Electr. Eng. Educ. 1999, 36, 139–153. [Google Scholar] [CrossRef]
- Alinejad-Beromi, Y.; Sedighizadeh, M.; Bayat, M.R.; Khodayar, M.E. Using genetic alghoritm for Distributed generation allocation to reduce losses and improve voltage profile. In Proceedings of the Universities Power Engineering Conference, Brighton, UK, 4–6 September 2007; pp. 954–959. [Google Scholar]
- Maherchandani, J.K.; Agarwal, C.; Sahi, M. Estimation of Solar Cell Model Parameter by Hybrid Genetic Algorithm Using MATLAB. Int. J. Adv. Res. Comput. Eng. Technol. 2012, 1, 78–81. [Google Scholar]
- Szpica, D.; Kisiel, M.; Czaban, J. Simulation Evaluation of the Influence of Selected Geometric Parameters on the Operation of the Pneumatic Braking System of a Trailer with a Differential Valve. Acta Mech. Autom. 2022, 16, 233–241. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| initial conditions | ||
| diameter of the piston | m | 65.5 × 10−3 |
| diameter of the piston rod | m | 10 × 10−3 |
| max piston displacement | m | 7.3 × 10−3 |
| piston and piston rod mass | kg | 46.8 × 10−3 |
| spring preload | N | 70 |
| seal pressure force on the wall | N | 5 |
| static friction coefficient | - | 0.8 |
| kinetic friction coefficient | - | 0.76 |
| inlet throughput | m2 | 5 × 10−6 |
| adiabatic exponent | - | 1.4 |
| air constant | J/(kg·K) | 287.5 |
| air temperature | K | 293.15 |
| boundary conditions at t = 0 s | ||
| volume of the upper chamber | m3 | 2.75 × 10−5 |
| volume of the lower chamber | m3 | 2.28 × 10−5 |
| piston displacement | m | 0 |
| pressure in volume | Pa | 1 × 105 |
| variable parameter during analysis | ||
| bore throughput in the piston | m2 | (0.05…0.525) × 10−6 |
| spring stiffness | N/m | (0.50…1.45) × 105 |
| Parameter | to, s | tc, s | hmax, ×10−3 m | thmax, s | tw, s |
|---|---|---|---|---|---|
| range | 0.24…0.37 | 1.32…7.50 | 0.97…7.30 | 0.73…1.18 | 0.96…7.26 |
| opt_1 | k = 1.45×105 N/m; (μA)noz = 0.525 × 10−6 m2 | ||||
| 0.37 | 1.32 | 0.99 | 0.97 | 0.96 | |
| opt_2 | k = 1.30×105 N/m; (μA)noz = 0.05 × 10−6 m2 | ||||
| 0.26 | 7.50 | 7.30 | 1.12 | 7.24 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kisiel, M.; Szpica, D. Suboptimal Analysis of the Differential System of the Conceptual Trailer Air Brake Valve. Appl. Sci. 2024, 14, 6792. https://doi.org/10.3390/app14156792
Kisiel M, Szpica D. Suboptimal Analysis of the Differential System of the Conceptual Trailer Air Brake Valve. Applied Sciences. 2024; 14(15):6792. https://doi.org/10.3390/app14156792
Chicago/Turabian StyleKisiel, Marcin, and Dariusz Szpica. 2024. "Suboptimal Analysis of the Differential System of the Conceptual Trailer Air Brake Valve" Applied Sciences 14, no. 15: 6792. https://doi.org/10.3390/app14156792
APA StyleKisiel, M., & Szpica, D. (2024). Suboptimal Analysis of the Differential System of the Conceptual Trailer Air Brake Valve. Applied Sciences, 14(15), 6792. https://doi.org/10.3390/app14156792