Precision Calibration and Linearity Assessment of Thin Film Force-Sensing Resistors


Abstract
:1. Introduction
2. Experimental Method
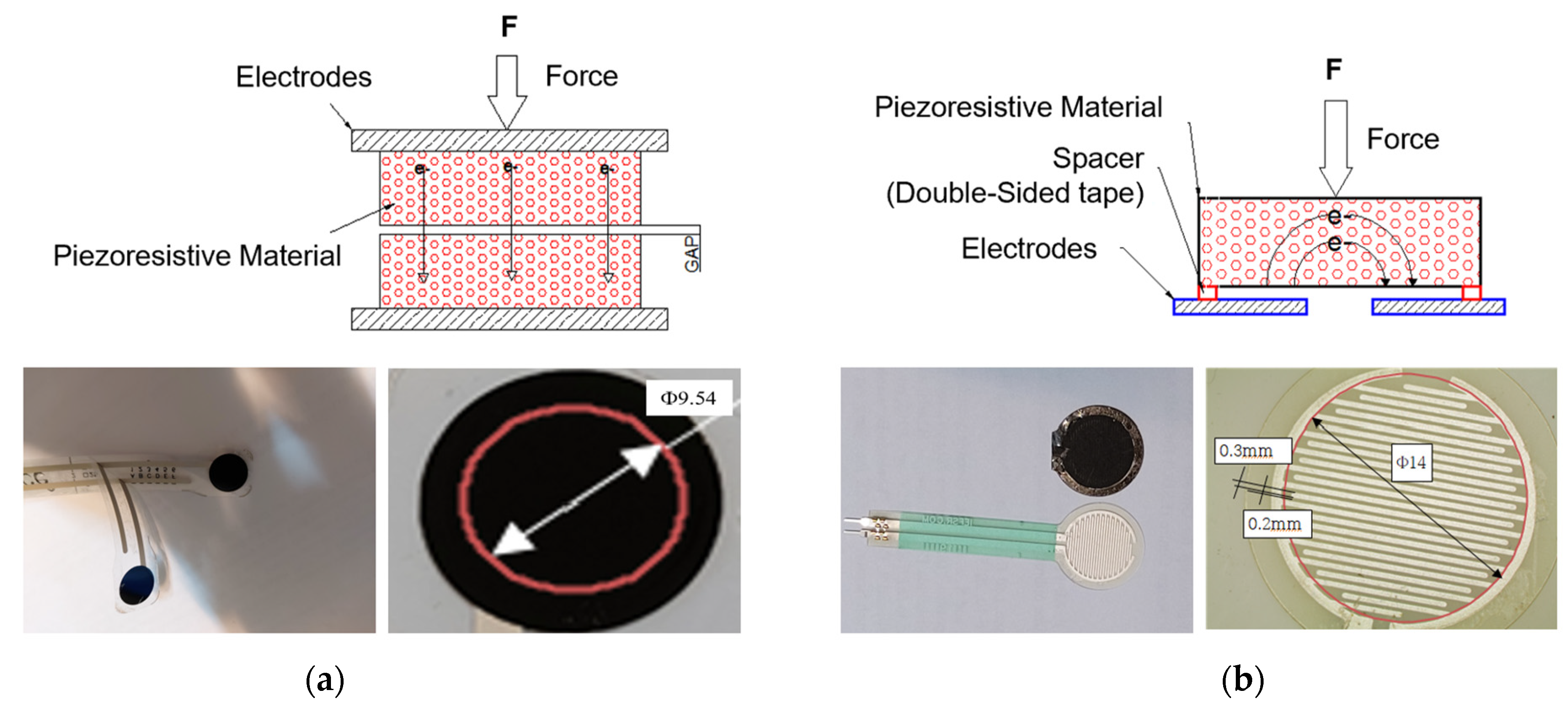
2.1. Sensor Structure
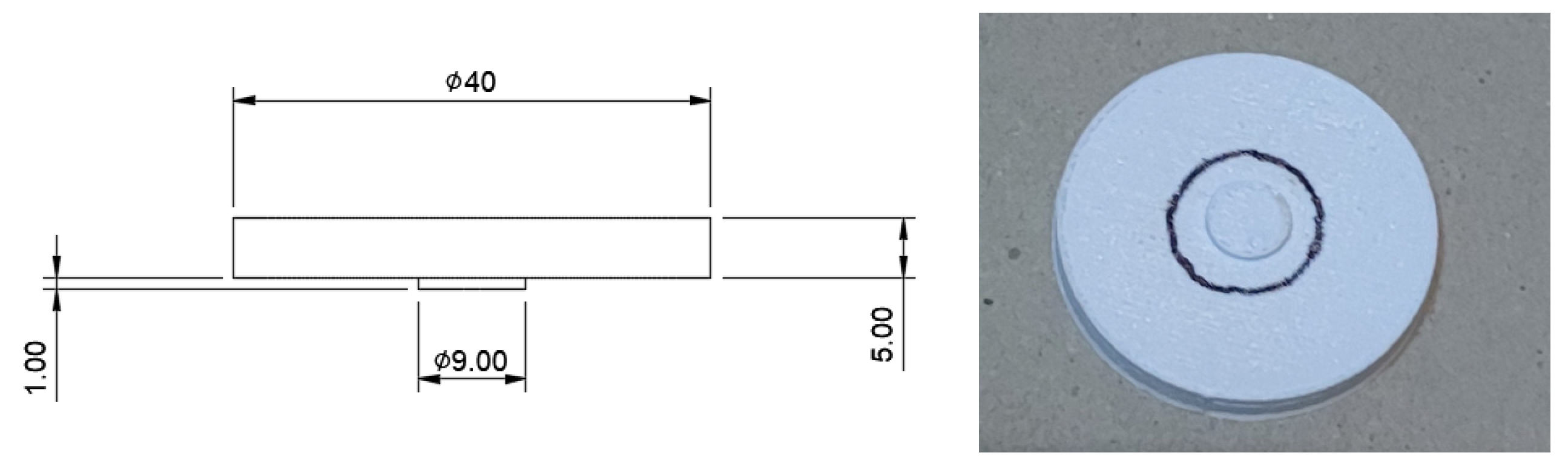
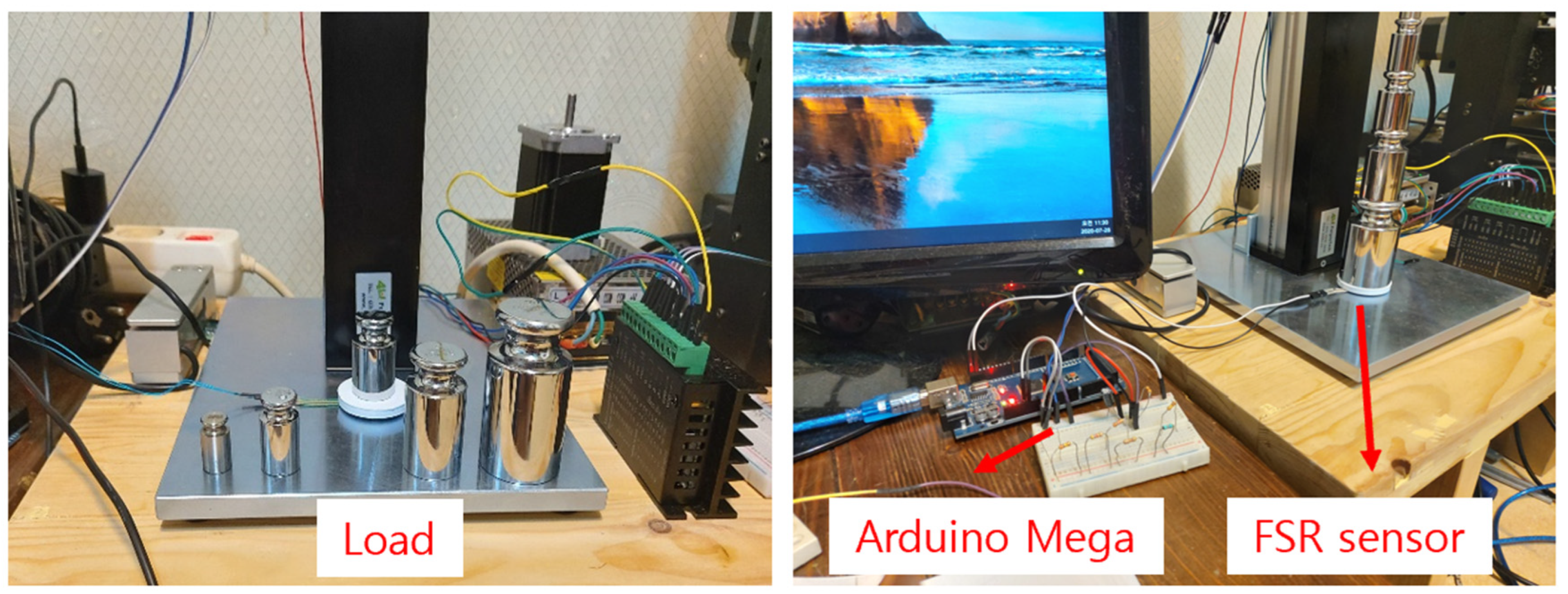
2.2. Load Application
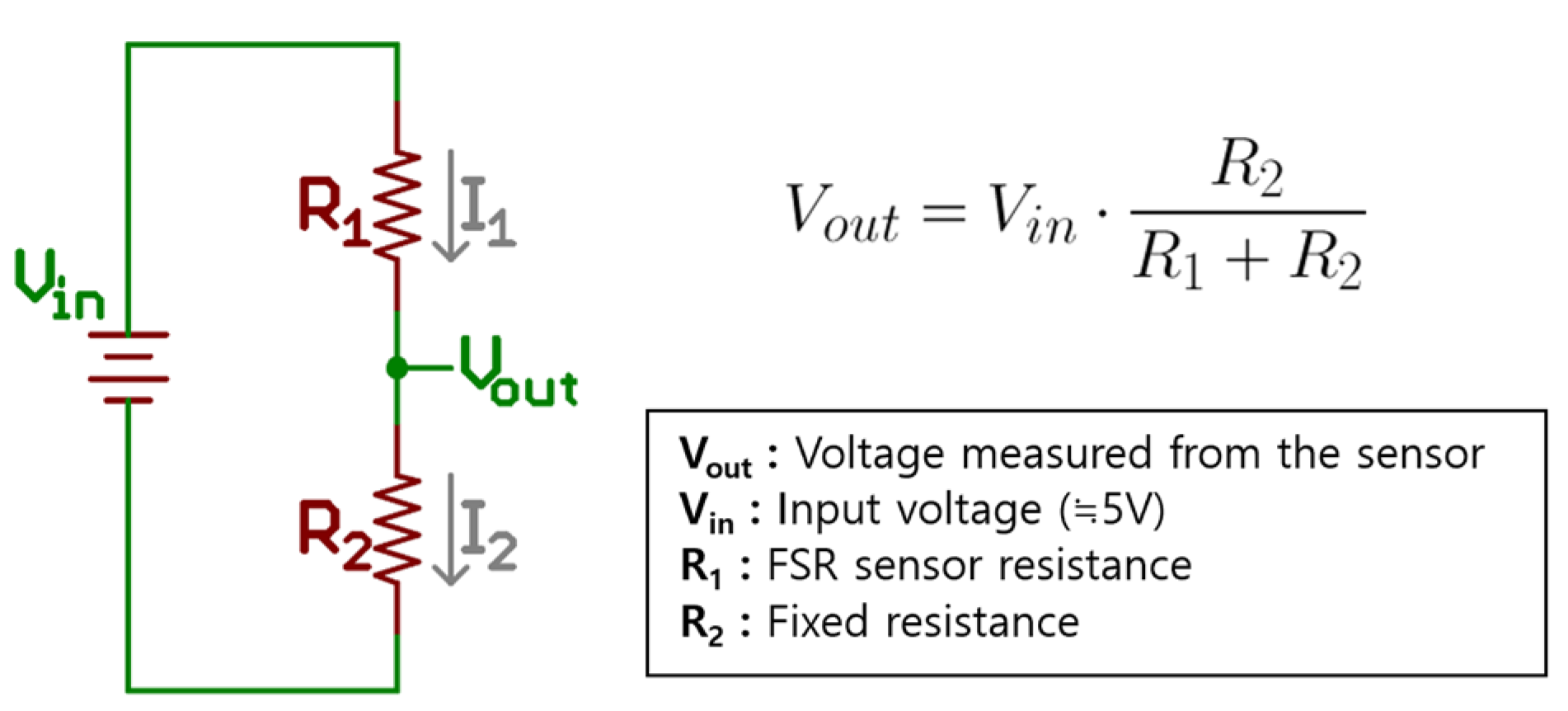
2.3. Resistance Measurement
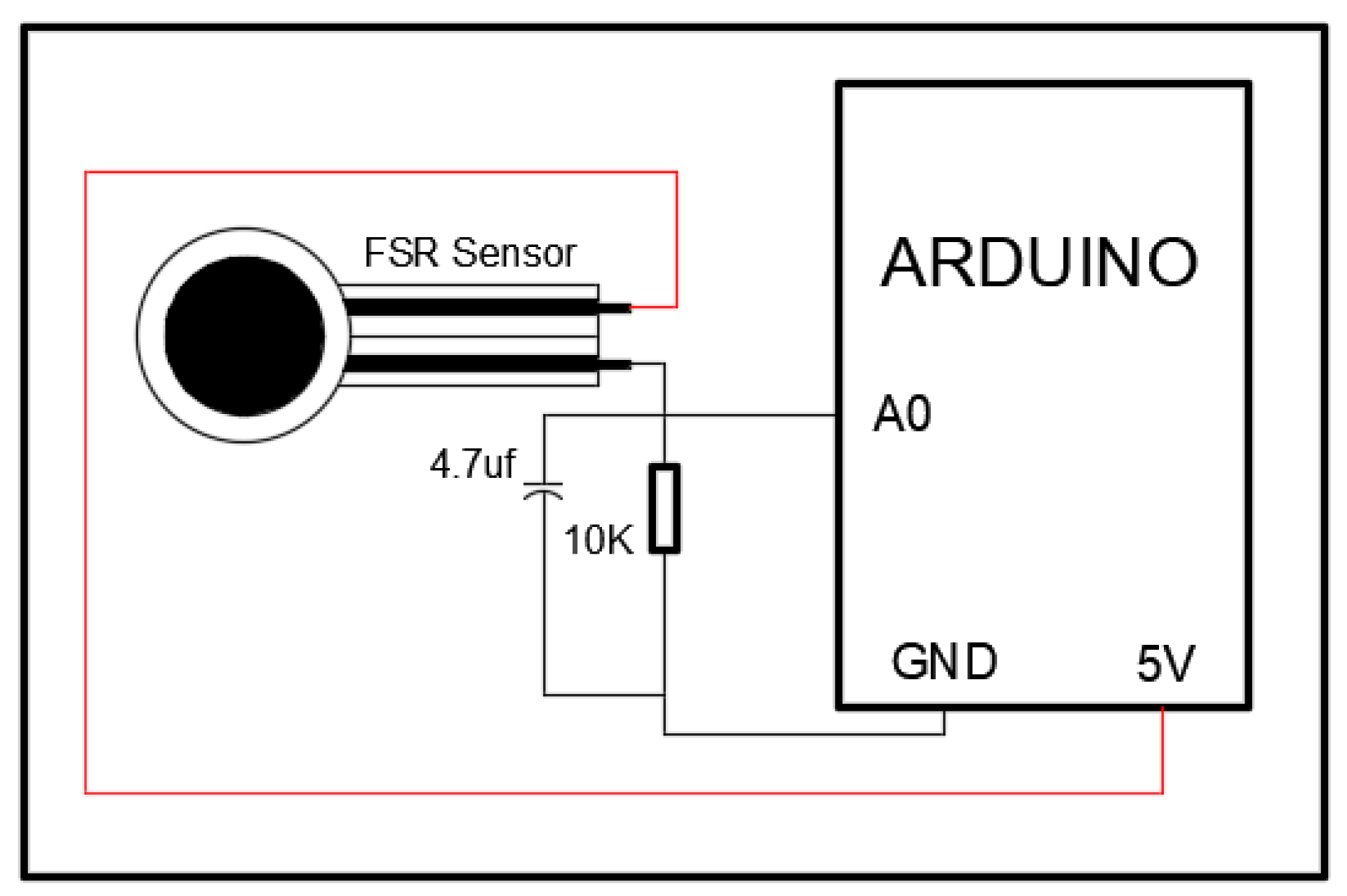
2.4. Data Acquisition
3. Results and Discussion
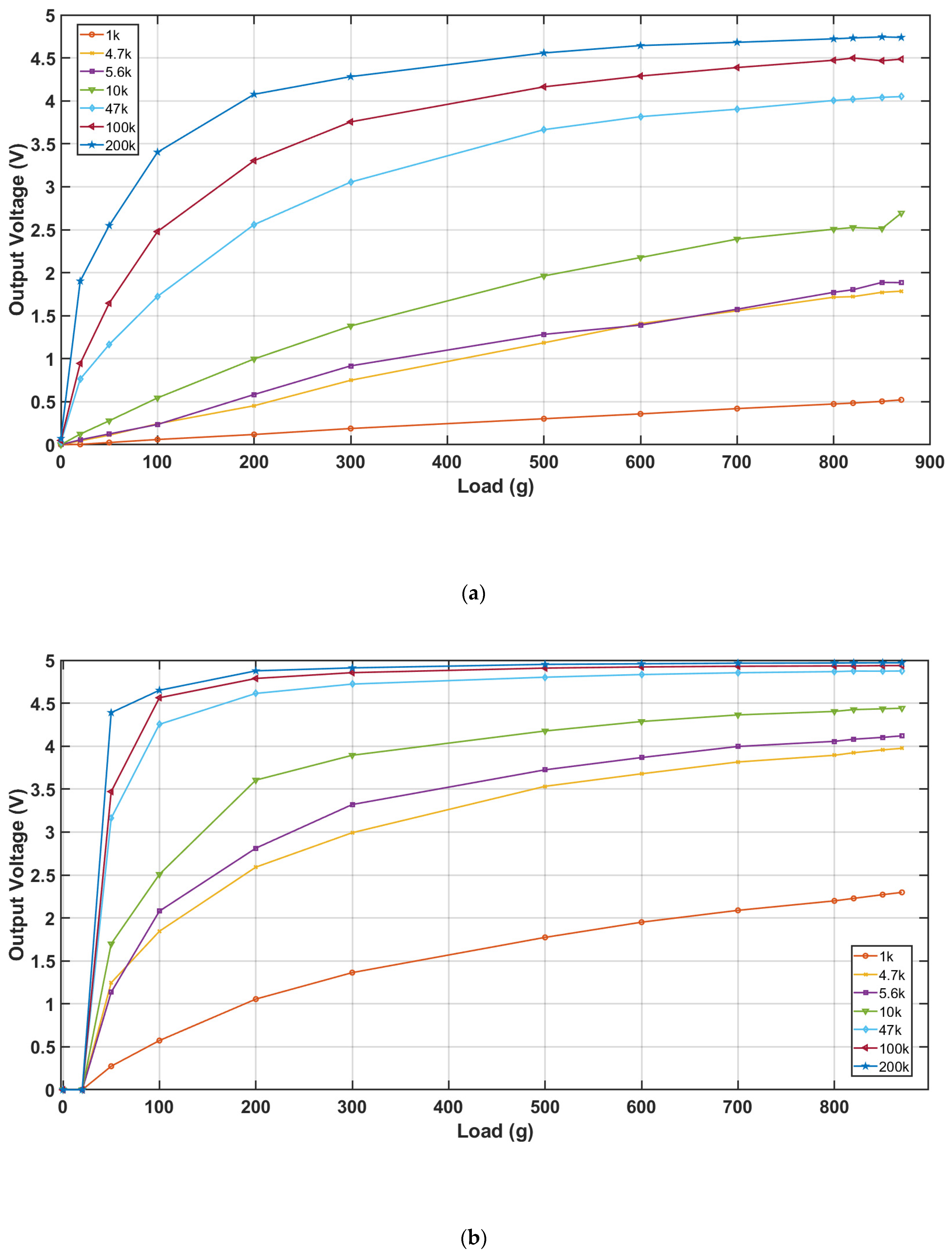
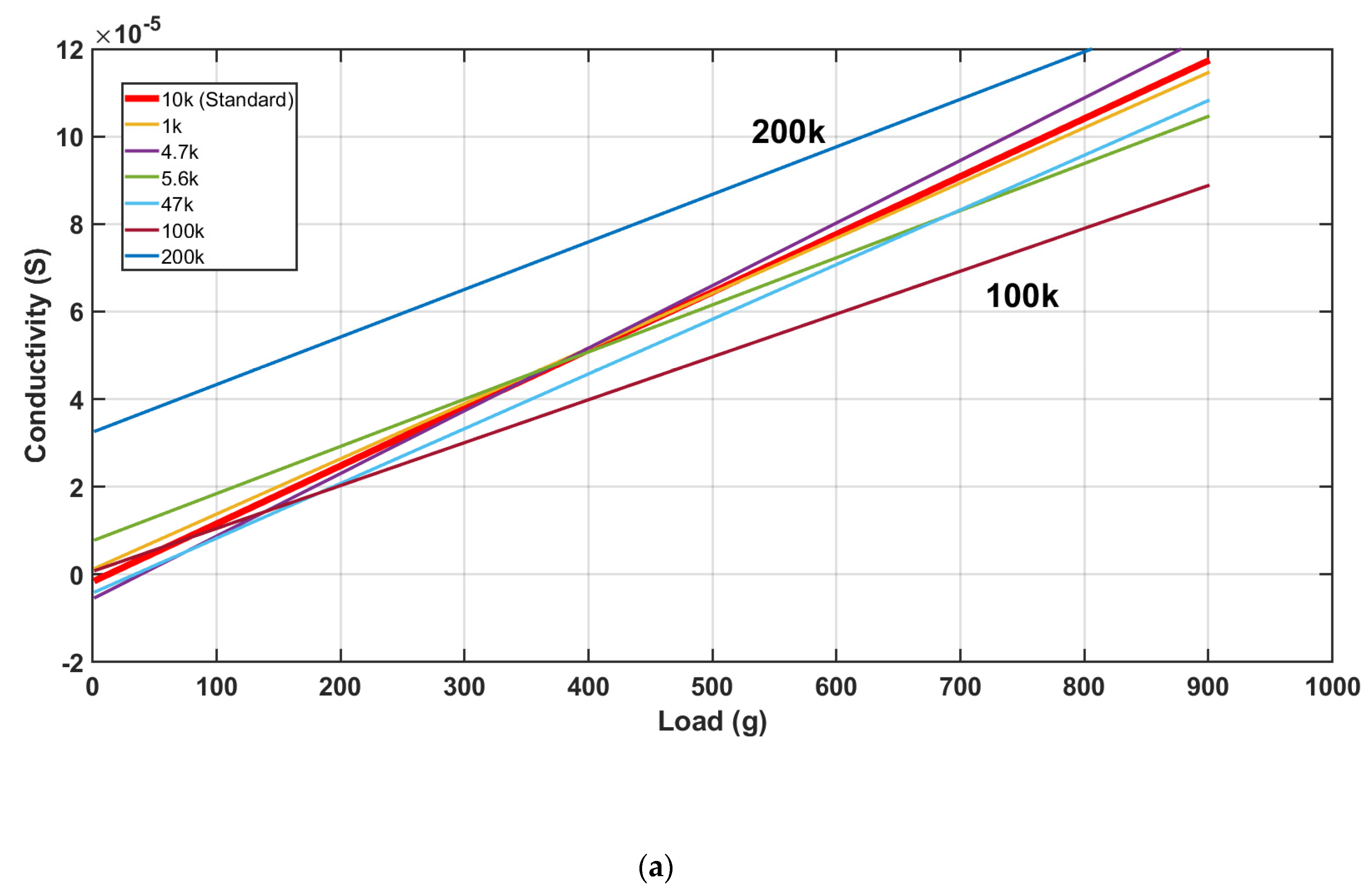
3.1. Analysis of the Average Measured Voltage and Conductivity
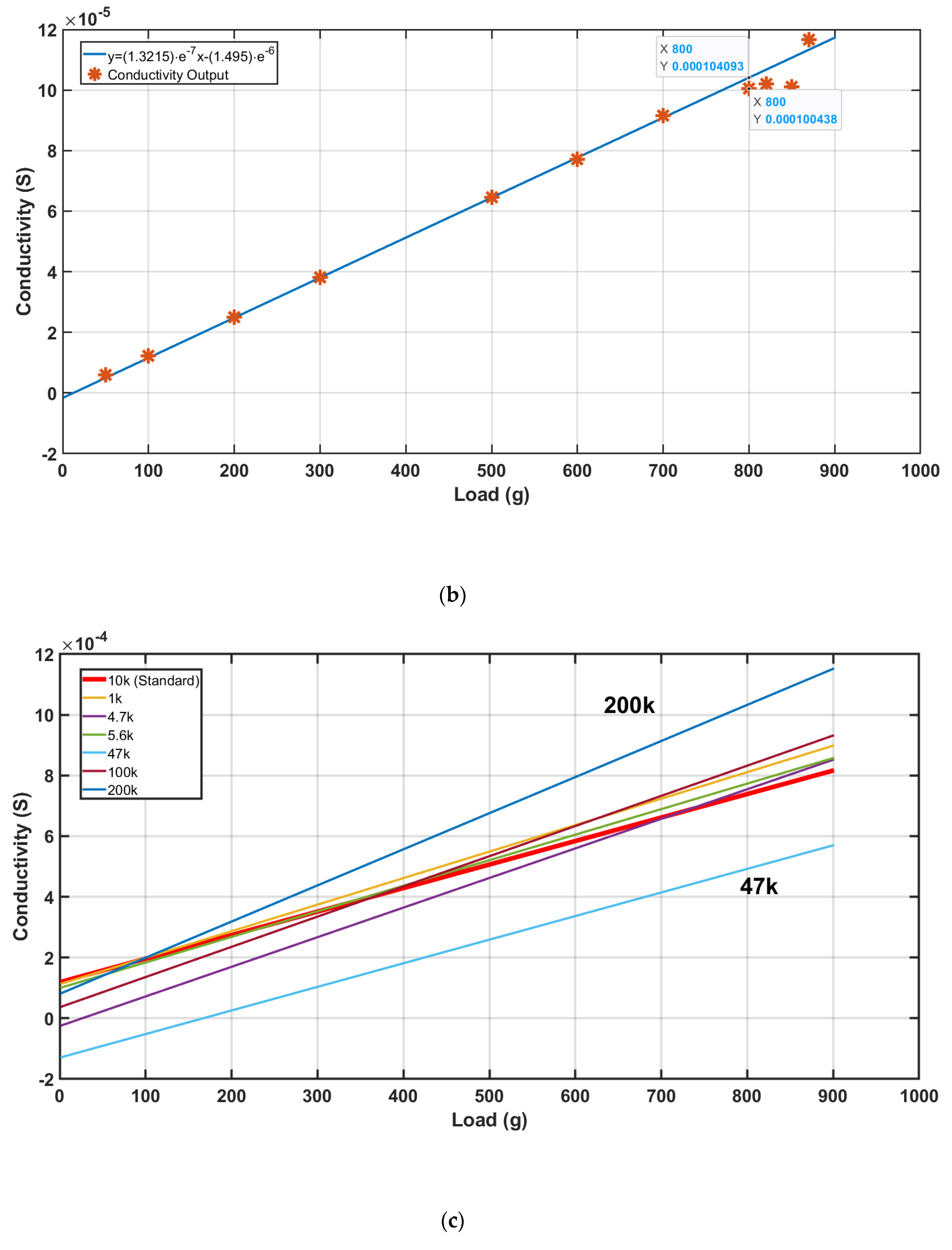
3.2. Equation of the Straight Line of the FSR Sensor Using Conductivity Data
4. Discussion
5. Conclusions
- High Linearity and Repeatability: Both the Flexiforce A201-1 and Interlink FSR-402 sensors demonstrated excellent linearity and repeatability, ensuring reliable and accurate force measurements.
- Comparison of Sensors: Interlink FSR-402 exhibited slightly higher conductivity compared with Flexiforce A201-1, highlighting differences in material composition and design.
- Calibration Methodology: Utilizing a voltage divider circuit and multiple fixed resistances, we derived calibration equations that significantly enhance measurement precision.
- Practical Applications: Precisely calibrated thin film FSR sensors are suitable for use in various applications, including medical devices, robotics, and consumer electronics, because of their cost-effectiveness and flexibility.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Saadeh, M.Y.; Carambat, T.D.; Arrieta, A.M. Evaluating and Modeling Force Sensing Resistors for Low Force Applications. In Proceedings of the ASME 2017 Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS2017), Snowbird, UT, USA, 18–20 September 2017; pp. 1–11. [Google Scholar]
- Sadun, A.S.; Jalani, J.; Sukor, J.A. Force Sensing Resistor (FSR): A Brief Overview and the Low-Cost Sensor for Active Compliance Control. Proc. SPIE 2016, 10011, 1001112. [Google Scholar]
- Bhargav, S.; Sundara Rajan, J. Force Sensitive Resistors: A New and Emerging Field of Research in Conducting Polymers. J. Mines Met. Fuels 2022, 70, 215–221. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, Y.; Li, Y.; Wang, P.; Hu, D. Recent Development of Flexible Force Sensors with Multiple Environmental Adaptations. Nano Energy 2024, 124, 109443. [Google Scholar] [CrossRef]
- Dahiya, R.; Navaraj, W.T.; Khan, S.; Polat, E.O. Developing Electronic Skin with Sense of Touch. Inf. Disp. 2015, 31, 6–10. [Google Scholar] [CrossRef]
- Qi, Z.; Song, Q.; Liu, Y.; Guo, C. FSM-HSVM-Based Locomotion Mode Recognition for Exoskeleton Robot. Appl. Sci. 2022, 12, 5483. [Google Scholar] [CrossRef]
- Yin, Z.; Zheng, J.; Huang, L.; Gao, Y.; Peng, H.; Yin, L. SA-SVM-Based Locomotion Pattern Recognition for Exoskeleton Robot. Appl. Sci. 2021, 11, 5573. [Google Scholar] [CrossRef]
- Castellarin, G.; Merlini, M.; Bettinelli, G.; Riso, R.; Bori, E.; Innocenti, B. Effect of an Innovative Biofeedback Insole on Patient Rehabilitation after Total Knee Arthroplasty. Appl. Sci. 2022, 12, 2456. [Google Scholar] [CrossRef]
- Lee, S.H.; Son, J. Development of a Safety Management System Tracking the Weight of Heavy Objects Carried by Construction Workers Using FSR Sensors. Appl. Sci. 2021, 11, 1378. [Google Scholar] [CrossRef]
- Ascioglu, G.; Senol, Y. Activity Recognition Using Different Sensor Modalities and Deep Learning. Appl. Sci. 2023, 13, 10931. [Google Scholar] [CrossRef]
- Seon, M.; Lee, Y.; Moon, C. Medical Robotic Bed to Prevent Pressure Sores. Appl. Sci. 2021, 11, 8459. [Google Scholar] [CrossRef]
- Jin, J.; Wang, S.; Zhang, Z.; Mei, D.; Wang, Y. Progress on Flexible Tactile Sensors in Robotic Applications on Objects Properties Recognition, Manipulation, and Human-Machine Interactions. Soft Sci. 2023, 3, 8. [Google Scholar]
- Luo, Y.; Matusik, W.; Rus, D.; Palacios, T.; Liu, C.; Lee, Y.J.; DelPreto, J.; Foshey, M.; Torralba, A.; Wu, K.; et al. Adaptive Tactile Interaction Transfer via Digitally Embroidered Smart Gloves. Nature 2023, 15, 868. [Google Scholar] [CrossRef] [PubMed]
- Ozioko, O.; Dahiya, R.S. Smart Tactile Gloves for Haptic Interaction, Communication, and Rehabilitation. Adv. Intell. Syst. 2021, 4, 2100091. [Google Scholar] [CrossRef]
- Polishchuck, A.; Navaraj, W.T.; Heidari, H.; Dahiya, R. Multisensory Smart Glove for Tactile Feedback in Prosthetic Hand. In Proceedings of the 30th Eurosensors Conference, Budapest, Hungary, 4–7 September 2016; Volume 168, pp. 1605–1608. [Google Scholar]
- Esposito, D.; Andreozzl, E.; Fratini, A.; Gargiulo, G. Piezoresistive Sensor to Measure Muscle Contraction and Mechanomyography. Sensors 2018, 18, 2553. [Google Scholar] [CrossRef] [PubMed]
- Cheng, M.; Zhu, G.; Zhang, F.; Tang, W.-L.; Jianping, S.; Yang, J.-Q.; Zhu, L.-Y. A Review of Flexible Force Sensors for Human Health Monitoring. J. Adv. Res. 2020, 26, 53–68. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Zhang, X. A Focused Review on the Flexible Wearable Sensors for Sports: From Kinematics to Physiologies. Micromachines 2022, 13, 1356. [Google Scholar] [CrossRef] [PubMed]
- Giovanelli, D.; Farella, E. Force Sensing Resistor and Evaluation of Technology for Wearable Body Pressure Sensing. J. Sens. 2016, 2016, 9391850. [Google Scholar] [CrossRef]
- Xu, J.; Pan, J.; Cui, T.; Zhang, S.; Yang, Y.; Ren, T.-L. Recent Progress of Tactile and Force Sensors for Human-Machine Interaction. Sensors 2023, 23, 1868. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.H.; Kwon, Y.C.; Kim, K.G.; Cha, Y.S. Estimation of Hand Motion from Piezoelectric Soft Sensor Using Deep Recurrent Network. Appl. Sci. 2020, 10, 2194. [Google Scholar] [CrossRef]
- Almassri, A.; Wada, C.; Wan Hasan, W.Z. Evaluation of a Commercial Force Sensor for Real-Time Applications. ICIC Express Lett. 2020, 11, 421–426. [Google Scholar]
- Hall, R.S.; Desmoulin, G.T.; Milner, T.E. A Technique for Conditioning and Calibrating Force-Sensing Resistors for Repeatable and Reliable Measurement of Compressive Force. J. Biomech. 2008, 41, 3492–3495. [Google Scholar] [CrossRef] [PubMed]
- Leonel, P.-M.; Arnaldo, M.; Jorge, O.B.; Carlos, A.-P.V.; Elkin, I.G.V. Underlying Physics of Conductive Polymer Composites and Force Sensing Resistors (FSRs): A Study on Creep Response and Dynamic Loading. Materials 2017, 10, 1334. [Google Scholar] [CrossRef] [PubMed]
- Nacy, S.; Baqer, I.A.; Tawfik, M.A. Static and Dynamic Calibration for FlexiForce Sensor Using a Special Purpose Apparatus. Innov. Syst. Des. Eng. 2013, 4, 2222–2871. [Google Scholar]
- Gutierrez Velasquez, E.I.; Gomez, V.I.; Paredes-Madrid, L.; Colorado, H.A. Error Compensation in Force Sensing Resistors. Sens. Bio-Sens. Res. 2019, 26, 100300. [Google Scholar]
- Swanson, E.C.; Weathersby, E.J.; Cagle, J.C.; Sanders, J.E. Evaluation of Force Sensing Resistors for the Measurement of Interface Pressures in Lower Limb Prosthetics. J. Biomech. Eng. 2019, 141, 101009. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flexiforce | Interlink Electronics | ||
|---|---|---|---|
| Model no. | A201-1 | FSR-402 | |
| Sensor type | Thru | Shunt | |
| Force-sensing range | 0~4.4 N | 0.1~10 N | |
| Actuation force | - | 0.1 N | |
| Size 1 | 9.53 mm | 18.28 mm | |
| Sensing area | 71.29 mm2 | 92.32 mm2 | calculated value |
| Response time | <5 µs |
| Weight Load (g) ± Tolerance (mg) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 20 ± 2.5 | 50 ± 3 | 100 ± 5 | 200 ± 10 | 300 ± 15 | |||||||
| Test load (g) | |||||||||||
| 20 | 50 | 100 | 200 | 300 | 500 | 600 | 700 | 800 | 820 | 850 | 870 |
| Fixed Resistance (Ω) | Conductivity | Equation of the Straight Line | Note | |
|---|---|---|---|---|
| 300 g | 500 g | |||
| 1 k | ||||
| 4.7 k | 3 | |||
| 5.6 k | ||||
| 10 k | Standard | |||
| 47 k | ||||
| 100 k | ||||
| 200 k | 3 | |||
| Fixed Resistance (Ω) | Conductivity | Equation of the Straight Line | Note | |
|---|---|---|---|---|
| 300 g | 500 g | |||
| 1 k | ||||
| 4.7 k | ||||
| 5.6 k | ||||
| 10 k | .75 | Standard | ||
| 47 k | ||||
| 100 k | ||||
| 200 k | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, J.; Lee, K.; Kim, B. Precision Calibration and Linearity Assessment of Thin Film Force-Sensing Resistors. Appl. Sci. 2024, 14, 6859. https://doi.org/10.3390/app14166859
Jung J, Lee K, Kim B. Precision Calibration and Linearity Assessment of Thin Film Force-Sensing Resistors. Applied Sciences. 2024; 14(16):6859. https://doi.org/10.3390/app14166859
Chicago/Turabian StyleJung, Jinwoo, Kihak Lee, and Bonghwan Kim. 2024. "Precision Calibration and Linearity Assessment of Thin Film Force-Sensing Resistors" Applied Sciences 14, no. 16: 6859. https://doi.org/10.3390/app14166859