



NPS6D200—A Long Range Nanopositioning Stage with 6D Closed Loop Control


Abstract
:1. Introduction
2. State of the Art
3. Setup and Subsystems of the 6D Nanopositioning System
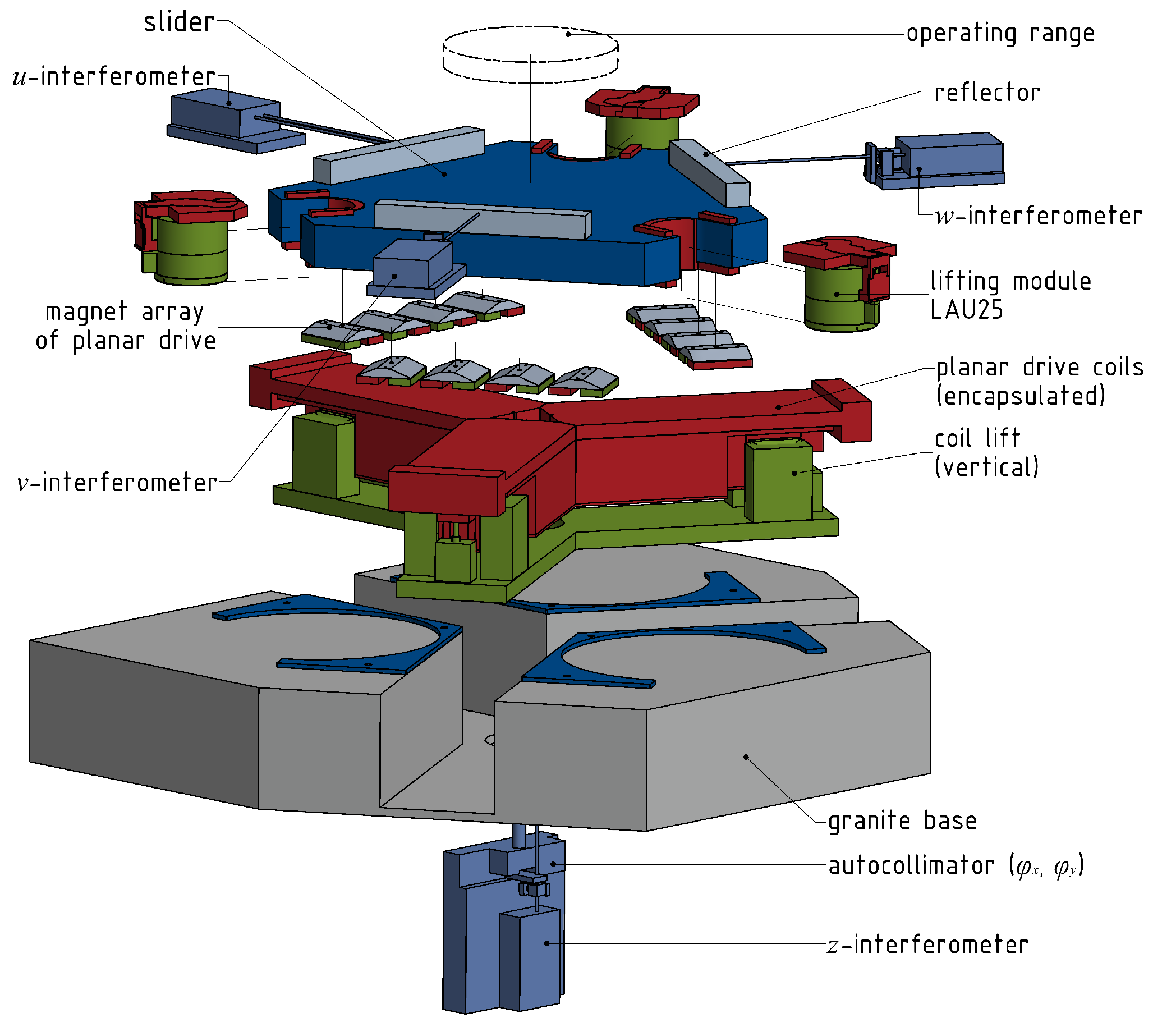
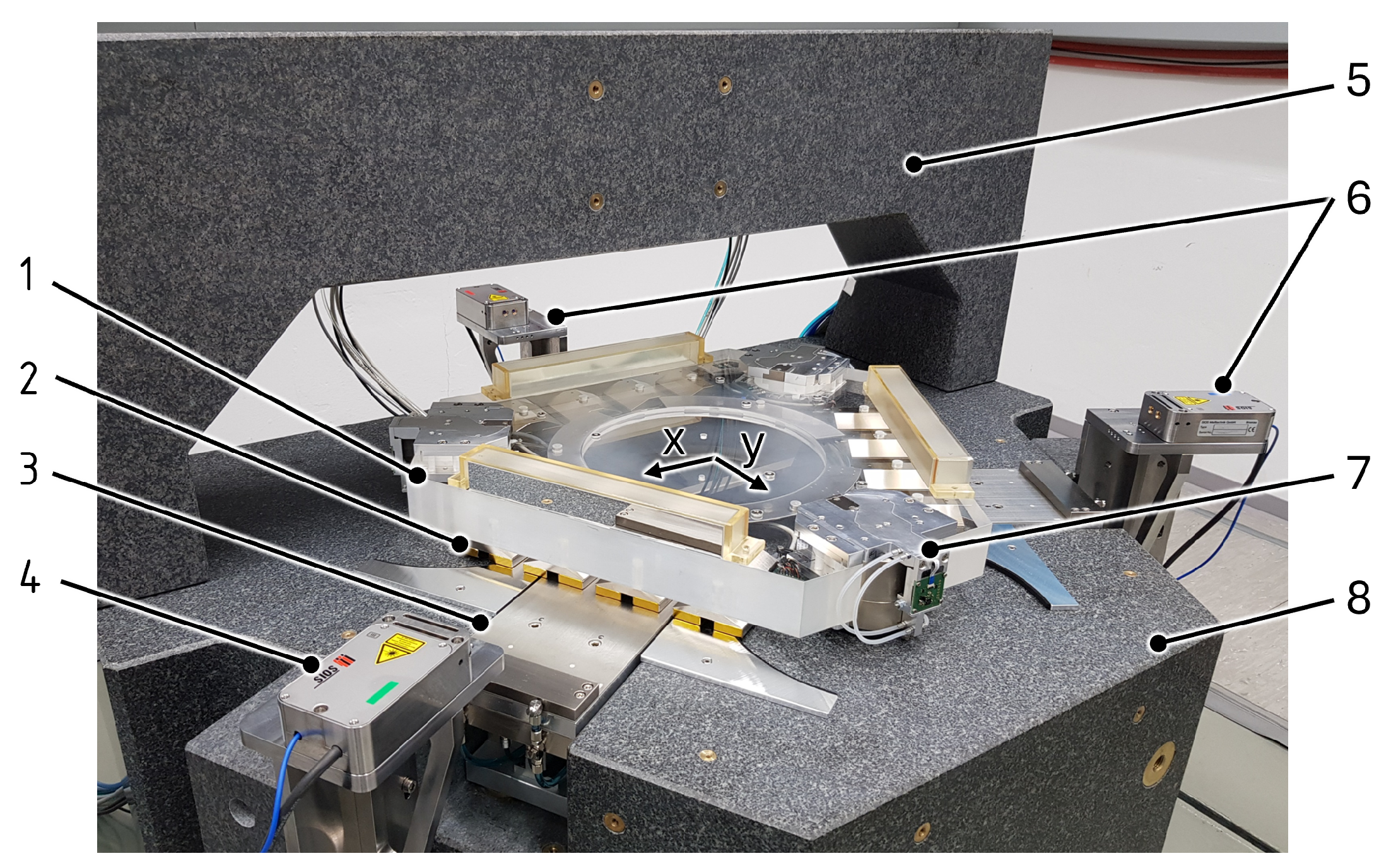
3.1. Stage Concept
- Compensate guiding deviations in z, , ;
- Compensate vertical shift at tilted probes;
- Measure 3D objects, tilted surfaces and macroscopic step heights;
- Enable applications that require vertical displacements, e.g., focus height variations in interferometry, contour following mode in atomic force microscopy
- Enable load/unload of the measurement object without having to remove the tool
- Nanopositioning platform for Ø200 mm × 25 mm operating range;
- Multiaxial direct drive system with contactless force application to the moving part;
- Pneumatic weight force compensation;
- Frictionless aerostatic guiding;
- High resolution 6D measurement of the slider position;
- 6D closed loop control;
- Scalable design approach;
- Open architecture to implement different applications and sensor tools.
3.2. Planar Drive System with Aerostatic Guiding
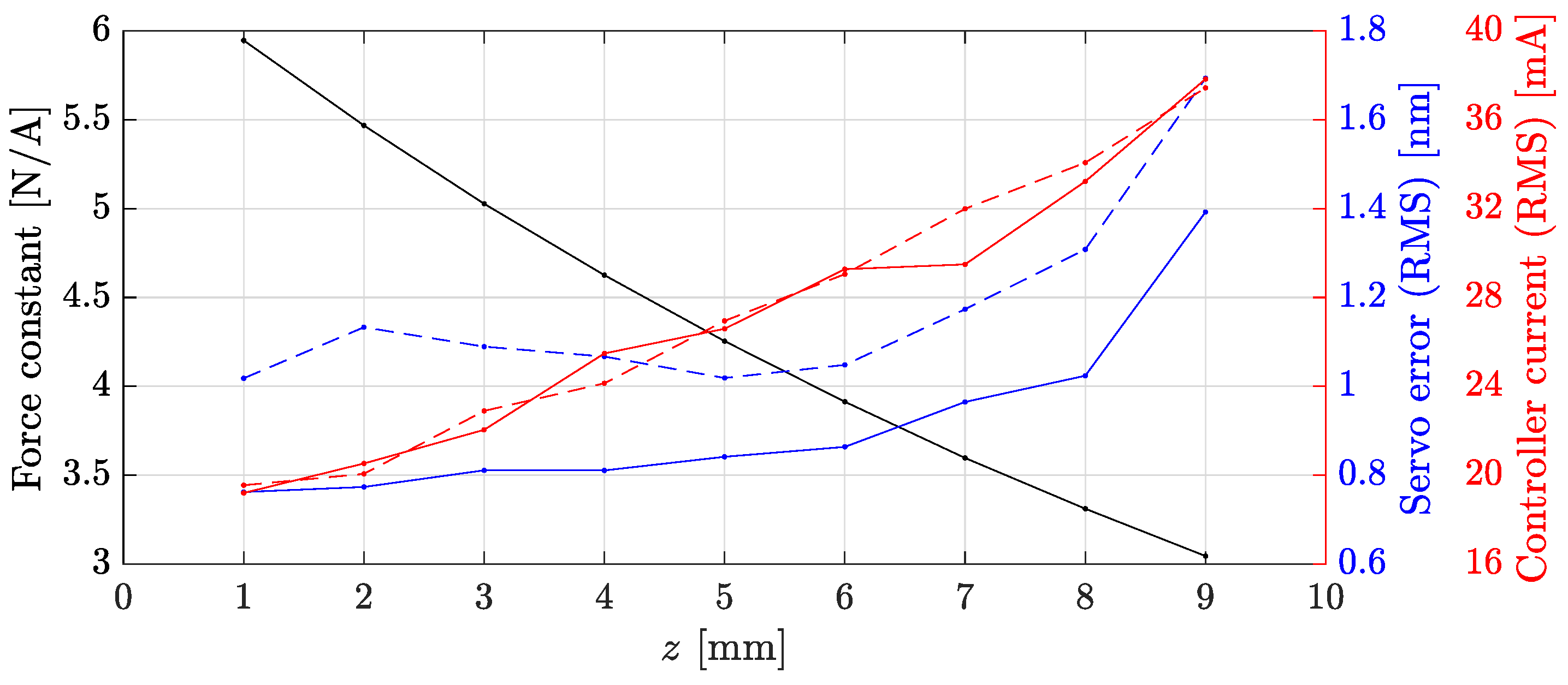
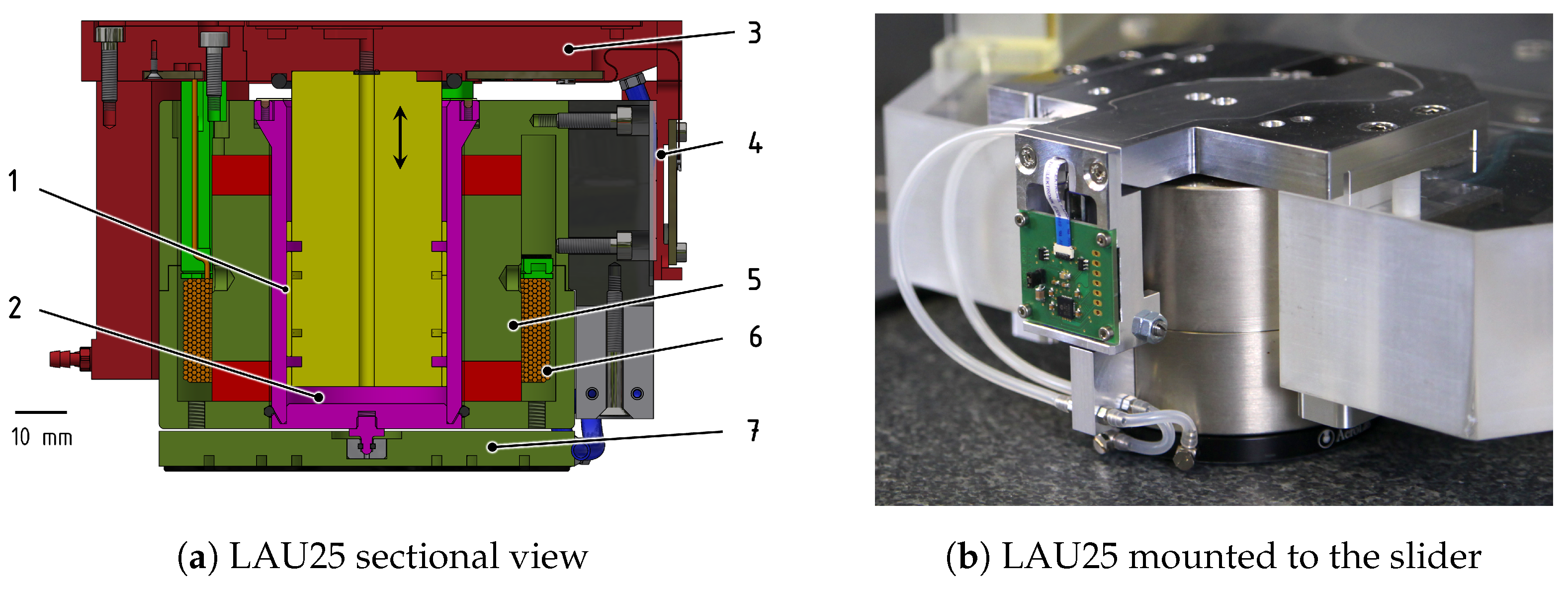
3.3. Vertical Drive System with Aerostatic Guiding and Weight Force Compensation
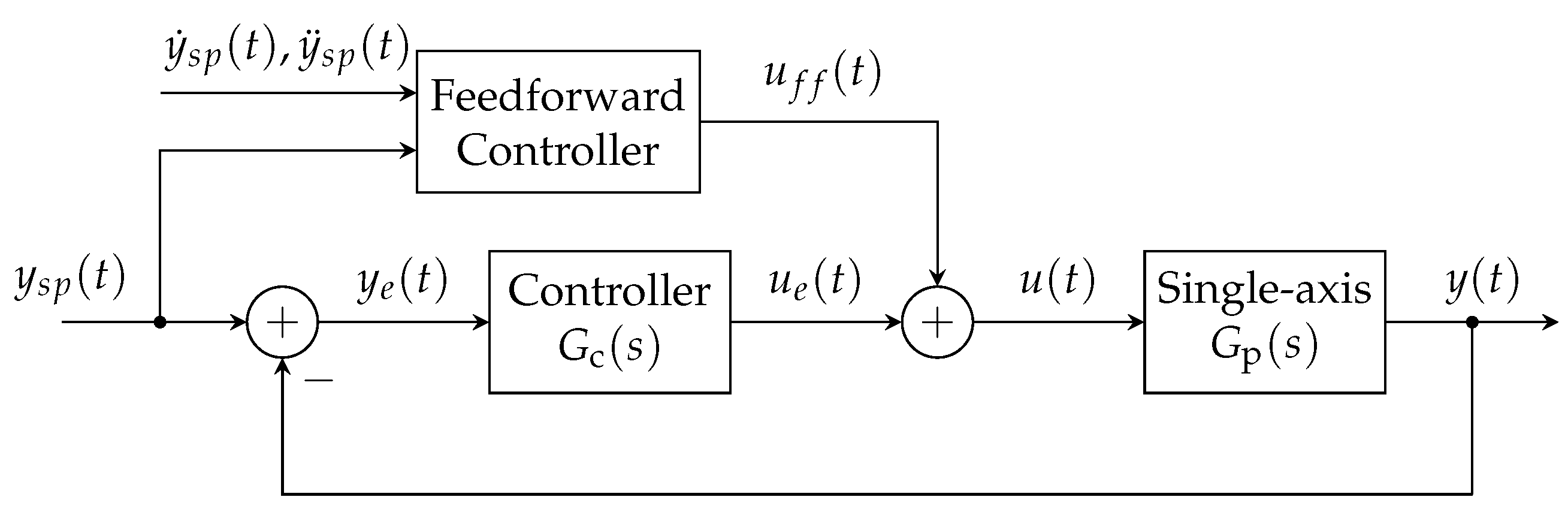
3.4. Control System
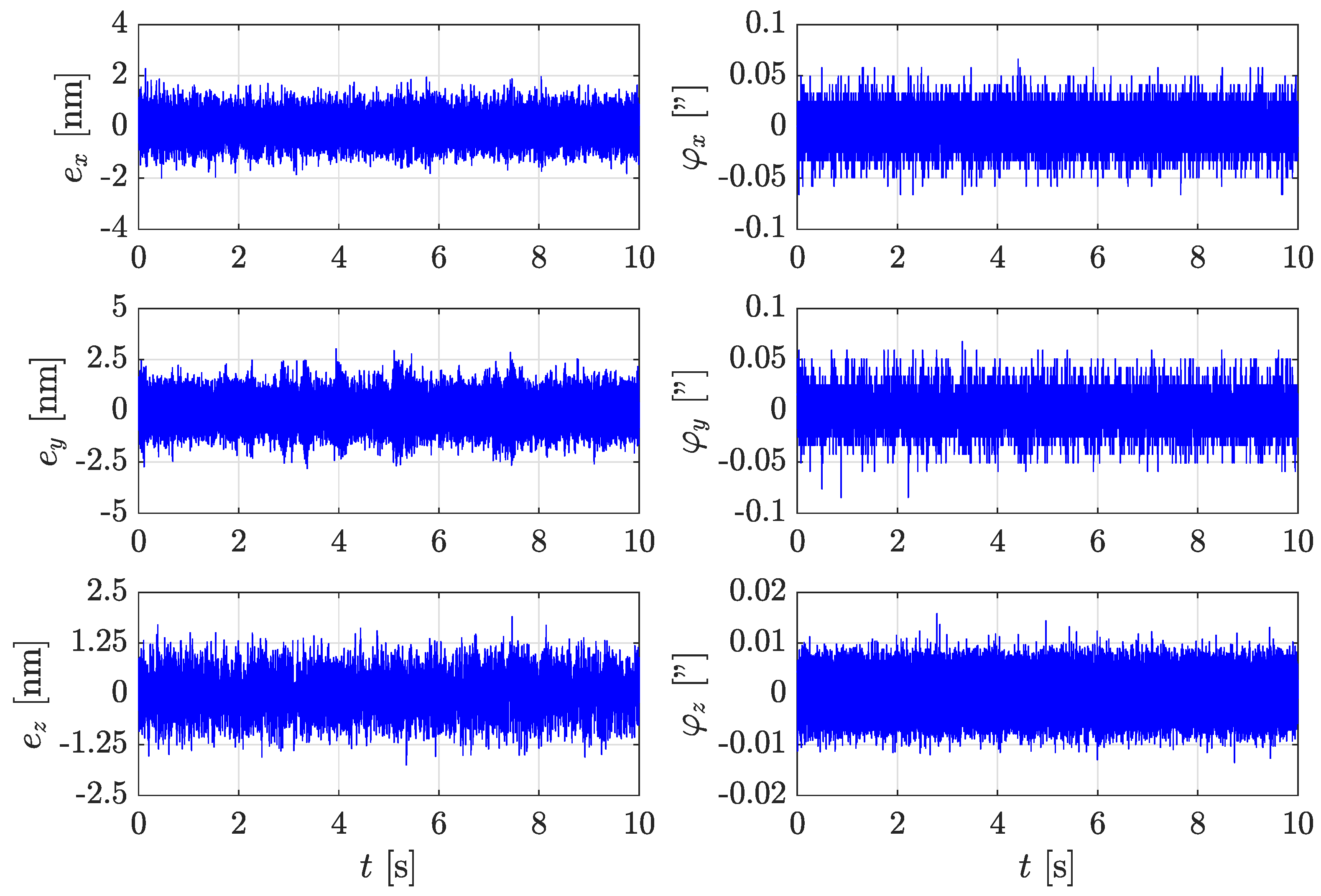
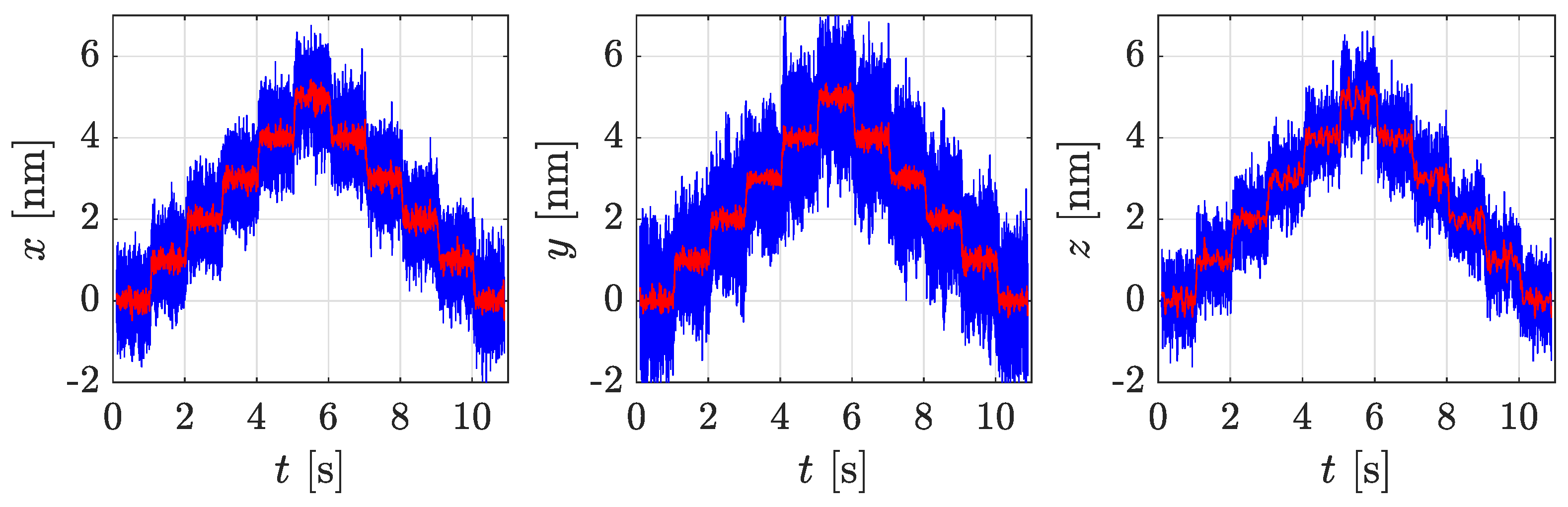
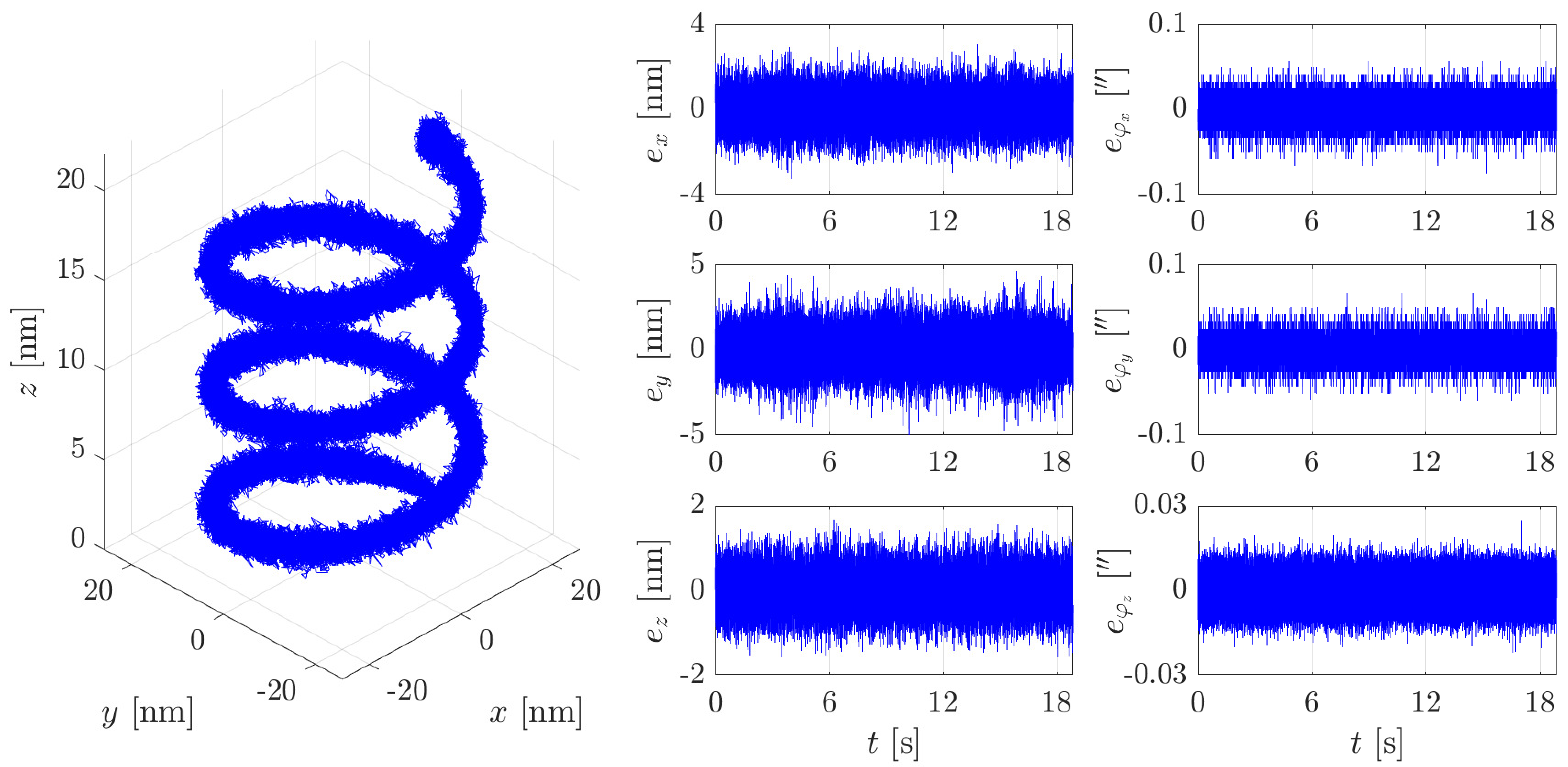
4. Positioning Characteristics in 6D Closed Loop Control
5. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DOF | Degree of freedom |
| LAU | Lifting and actuation unit |
| NPS | Nanopositioning system |
| CMM | Coordinate measurement machine |
| DI | Differential interferometer |
| RMS | Root mean square |
| PID | Proportional integral derivative (controller) |
References
- Chen, Y.; Shu, Z.; Zhang, S.; Zeng, P.; Liang, H.; Zheng, M.; Duan, H. Sub-10 nm fabrication: Methods and applications. Int. J. Extrem. Manuf. 2021, 3, 032002. [Google Scholar] [CrossRef]
- The International Roadmap for Devices and Systems: 2022. Technical Report, Executive Summary. 2022. Available online: https://irds.ieee.org/editions/2022/executive-summary (accessed on 28 March 2024).
- Oh, D.K.; Jeong, H.; Kim, J.; Kim, Y.; Kim, I.; Ok, J.G.; Rho, J. Top-down nanofabrication approaches toward single-digit-nanometer scale structures. J. Mech. Sci. Technol. 2021, 35, 837–859. [Google Scholar] [CrossRef]
- He, Y.X.; Lin, R.W.; Li, R.J.; Li, J.; Cheng, Z.Y.; Pan, Q.S.; Huang, Q.X.; Fan, K.C. Nanopositioning X–Y stage with an embedded Six-DOF error compensation system based on Abbe and Bryan principles. Measurement 2024, 227, 114218. [Google Scholar] [CrossRef]
- Fan, K.C.; Fei, Y.T.; Yu, X.; Chen, Y.; Wang, W.L.; Chen, F.; Liu, Y. Development of a low-cost micro-CMM for 3D micro/nano measurements. Meas. Sci. Technol. 2006, 17, 524. [Google Scholar] [CrossRef]
- Kim, W.J.; Verma, S.; Shakir, H. Design and precision construction of novel magnetic-levitation-based multi-axis nanoscale positioning systems. Precis. Eng. 2007, 31, 337–350. [Google Scholar] [CrossRef]
- Ro, S.K.; Park, J.K. A compact ultra-precision air bearing stage with 3-DOF planar motions using electromagnetic motors. Int. J. Precis. Eng. Manuf. 2011, 12, 115–119. [Google Scholar] [CrossRef]
- Werner, C. A 3D Translation Stage for Metrological AFM. Ph.D. Thesis, Technische Universiteit Eindhoven, Eindhoven, The Netherlands, 2010. [Google Scholar] [CrossRef]
- Hocken, R.J.; Fesperman, R.; Overcash, J.; Ozturk, O.; Stroup, C. Engineering nanotechnology: The top down approach. Key Eng. Mater. 2008, 381, 3–6. [Google Scholar] [CrossRef]
- Brand, U.; Kirchhoff, J. A micro-CMM with metrology frame for low uncertainty measurements. Meas. Sci. Technol. 2005, 16, 2489. [Google Scholar] [CrossRef]
- Hausotte, T. Nanopositionier-und Nanomessmaschine. Ph.D. Thesis, Technische Universität Ilmenau, Ilmenau, Germany, 2002. [Google Scholar]
- Moers, A.; van Riel, M.C.; Bos, E.J. Design and Verification of the Trinano Ultra Precision CMM; Universitätsbibliothek Ilmenau: Ilmenau, Germany, 2011. [Google Scholar]
- Abbe, E. Messapparate für Physiker. Z. Instrumentenkunde 1890, 10, 446–448. [Google Scholar]
- Bryan, J.B. The Abbe principle revisited: An updated interpretation. Precis. Eng. 1979, 1, 129–132. [Google Scholar] [CrossRef]
- Schellekens, P.; Rosielle, N.; Vermeulen, H.; Vermeulen, M.; Wetzels, S.; Pril, W. Design for precision: Current status and trends. CIRP Ann. 1998, 47, 557–586. [Google Scholar] [CrossRef]
- Yagüe-Fabra, J.A.; Gao, W.; Archenti, A.; Morse, E.; Donmez, A. Scalability of precision design principles for machines and instruments. CIRP Ann. 2021, 70, 659–680. [Google Scholar] [CrossRef]
- Torralba, M.; Yagüe-Fabra, J.A.; Albajez, J.A.; Aguilar, J.J. Design optimization for the measurement accuracy improvement of a large range nanopositioning stage. Sensors 2016, 16, 84. [Google Scholar] [CrossRef] [PubMed]
- Yoshioka, H.; Sawano, H.; Shinno, H. A newly developed ultraprecision machine tool ‘angel’. In Proceedings of the 10th Euspen International Conference, Delft, The Netherlands, 31 May–4 June 2010; Volume 2, p. 239. [Google Scholar]
- Widdershoven, I.; Donker, R.; Spaan, H. Realization and calibration of the “Isara 400” ultra-precision CMM. In Proceedings of the 13th International Conference on Metrology and Properties of Engineering Surfaces, Twickenham, UK, 12–15 April 2011; IOP Publishing: Bristol, UK, 2011; Volume 311, p. 012002. [Google Scholar]
- Vermeulen, M.M.P.A.; Rosielle, P.; Schellekens, P. Design of a high-precision 3D-coordinate measuring machine. CIRP Ann. 1998, 47, 447–450. [Google Scholar] [CrossRef]
- Seggelen, J. NanoCMM; A 3D Coordinate Measuring Machine with Low Moving Mass for Measuring Small Products in Array with Nanometer Uncertainty. Ph.D. Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 2007. [Google Scholar]
- Ruijl, T.A.M. Ultra Precision Coordinate Measuring Machine-Design, Calibration and Error Compensation. Ph.D. Thesis, Technische Universiteit Delft, Delft, The Netherlands, 2001. [Google Scholar]
- Tsutsumi, H.; Yoshizumi, K.; Takeuchi, H. Ultrahighly accurate 3D profilometer. Optical Design and Testing II. Photonics Asia. Proc. SPIE 2005, 5638, 387–394. [Google Scholar]
- Chung, T.T.; Chu, C.H.; Chian, H.F.; Huang, C.; Fan, K.C.; Yen, J.Y.; Szu, K.I. Structural design and analysis of a nano-positioning planar motion stage. In Proceedings of the 2011 9th World Congress on Intelligent Control and Automation, Taipei, Taiwan, 21–25 June 2011; pp. 833–838. [Google Scholar]
- Liu, C.H.; Jywe, W.Y.; Jeng, Y.R.; Hsu, T.H.; Li, Y.T. Design and control of a long-traveling nano-positioning stage. Precis. Eng. 2010, 34, 497–506. [Google Scholar] [CrossRef]
- Kallenbach, E.; König, K.; Saffert, E.; Schäffel, C.; Eccarius, M. Integrated Design of Shape and Function in Mechatronic Systems. In From Design Methods to Industrial Applications, Proceedings of the Third Conference on Mechatronics and Robotics, Paderborn, Germany, 4–6 October 1995; Springer: Berlin/Heidelberg, Germany, 1995; pp. 44–51. [Google Scholar]
- Hesse, S.; Schäffel, C.; Katzschmann, M.; Maaß, T.; Mohr, H. Planar motor concept for positioning with nanometer position uncertainty. In Proceedings of the 8th International Conference of the European Society for Precision Engineering and Nanotechnology, Zurich, Switzerland, 18–21 August 2008; pp. 150–154. [Google Scholar]
- Hesse, S.; Schäffel, C.; Mohr, H.U.; Katzschmann, M.; Büchner, H.J. Design and performance evaluation of an interferometric controlled planar nanopositioning system. Meas. Sci. Technol. 2012, 23, 074011. [Google Scholar] [CrossRef]
- Jäger, G.; Hausotte, T.; Manske, E.; Büchner, H.J.; Mastylo, R.; Dorozhovets, N.; Hofmann, N. Nanomeasuring and nanopositioning engineering. Measurement 2010, 43, 1099–1105. [Google Scholar] [CrossRef]
- Manske, E.; Jäger, G.; Hausotte, T.; Füßl, R. Recent developments and challenges of nanopositioning and nanomeasuring technology. Meas. Sci. Technol. 2012, 23, 074001. [Google Scholar] [CrossRef]
- Manske, E.; Fröhlich, T.; Füßl, R.; Ortlepp, I.; Mastylo, R.; Blumröder, U.; Dontsov, D.; Kühnel, M.; Köchert, P. Progress of nanopositioning and nanomeasuring machines for cross-scale measurement with sub-nanometre precision. Meas. Sci. Technol. 2020, 31, 085005. [Google Scholar] [CrossRef]
- Kühnel, M.; Ortlepp, I.; Hofmann, M.; Weidenfeller, L.; Kirchner, J.; Supreeti, S.; Mastylo, R.; Füßl, R.; Rangelow, I.; Fröhlich, T.; et al. Nanopositioning and Nanomeasuring Machines (NPMM) and their application for nanofabrication in extended working volumes. In Proceedings of the 14th International Symposium on Measurement Technology and Intelligent Instruments ISMTII, Niigata, Japan, 1–4 September 2019. [Google Scholar]
- Ortlepp, I.; Fröhlich, T.; Füßl, R.; Reger, J.; Schäffel, C.; Sinzinger, S.; Strehle, S.; Theska, R.; Zentner, L.; Zöllner, J.P.; et al. Tip-and laser-based 3D nanofabrication in extended macroscopic working areas. Nanomanuf. Metrol. 2021, 4, 132–148. [Google Scholar] [CrossRef]
- Fern, F.; Fuessl, R.; Manske, E.; Schienbein, R.; Theska, R.; Ortlepp, I.; Leineweber, J. Measurement uncertainty analysis on a five-axis nano coordinate measuring machine NMM-5D following a vectorial approach. Tech. Mess. 2021, 88, 61–70. [Google Scholar] [CrossRef]
- Stauffenberg, J.; Ortlepp, I.; Blumröder, U.; Dontsov, D.; Schäffel, C.; Holz, M.; Rangelow, I.W.; Manske, E. Investigations on the positioning accuracy of the Nano Fabrication Machine (NFM-100). Tech. Mess. 2021, 88, 581–589. [Google Scholar] [CrossRef]
- Stauffenberg, J.; Ortlepp, I.; Belkner, J.; Dontsov, D.; Langlotz, E.; Hesse, S.; Rangelow, I.; Manske, E. Measurement precision of a planar nanopositioning machine with a range of motion of Ø100 mm. Appl. Sci. 2022, 12, 7843. [Google Scholar] [CrossRef]
- Stauffenberg, J.; Reibe, M.; Krötschl, A.; Reuter, C.; Ortlepp, I.; Dontsov, D.; Hesse, S.; Rangelow, I.W.; Strehle, S.; Manske, E. Tip-based nanofabrication below 40 nm combined with a nanopositioning machine with a movement range of Ø100 mm. Micro Nano Eng. 2023, 19, 100201. [Google Scholar] [CrossRef]
- Gorges, S.; Hesse, S.; Schäffel, C.; Ortlepp, I.; Manske, E.; Langlotz, E.; Dontsov, D. Integrated planar 6-DOF nanopositioning system. IFAC-PapersOnLine 2019, 52, 313–318. [Google Scholar] [CrossRef]
- SIOS GmbH. Differential Laser Interferometer SP 5000 DI/F. 2024. Available online: https://www.sios-precision.com/en/products/length-measurement-systems/differential-laser-interferometer-sp-5000-di-f (accessed on 24 May 2024).
- Gorges, S. A Lifting and Actuating Unit for a Planar Nanoprecision Drive System. Ph.D. Thesis, Technische Universität Ilmenau, Ilmenau, Germany, 2020. [Google Scholar]
- dSpace GmbH. Scalexio Modular Real-Time System. 2024. Available online: https://www.dspace.com/en/pub/home/products/hw/simulator_hardware/scalexio.cfm (accessed on 27 May 2024).
- Eleftheriou, E.; Moheimani, S.R. Control Technologies for Emerging Micro and Nanoscale Systems; Springer: Berlin/Heidelberg, Germany, 2011; Volume 413. [Google Scholar]
- Fleming, A.J.; Leang, K.K. Design, Modeling and Control of Nanopositioning Systems; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Huaman, A.S.; Reger, J. Robust Tracking Control with L1 Adaptive Augmentation for a Long-Stroke Vertical Nanopositioning System: Part I. In Proceedings of the IEEE Conference on Control Technology and Applications (CCTA), Trieste, Italy, 23–25 August 2022; pp. 614–620. [Google Scholar]
- Huaman, A.S.; Reger, J. Robust Tracking Control with L1 Adaptive Augmentation for a Long-Stroke Vertical Nanopositioning System: Part II. In Proceedings of the IEEE Conference on Control Technology and Applications (CCTA), Trieste, Italy, 23–25 August 2022; pp. 621–627. [Google Scholar]
- Huaman, A.S.; Reger, J. Robust Adaptive Tracking Control of a 3D Vertical Motion System for Nanometer Precision Applications. IFAC World Congr. 2023, 56, 5332–5339. [Google Scholar] [CrossRef]
- Huaman, A.S. Highly Dynamic Nanopositioning: A Robust Adaptive Control Approach. Ph.D. Thesis, Technische Universität Ilmenau, Ilmenau, Germany, 2024. [Google Scholar]
- Hovakimyan, N.; Cao, C. L1 Adaptive Control Theory: Guaranteed Robustness with Fast Adaptation; SIAM: Philadelphia, PA, USA, 2010. [Google Scholar]
- Gibson, T.E.; Annaswamy, A.M.; Lavretsky, E. On adaptive control with closed-loop reference models: Transients, oscillations, and peaking. IEEE Access 2013, 1, 703–717. [Google Scholar] [CrossRef]
- Zhao, P.; Snyder, S.; Hovakimyan, N.; Cao, C. Robust adaptive control of linear parameter-varying systems with unmatched uncertainties. J. Guid. Control. Dyn. 2024, 1–18. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| -operating range | Ø200 |
| z-operating range | 25 |
| planar velocity 1 | 50 |
| vertical velocity | 2 |
| acceleration | 250 |
| moving mass | 36 |
| payload | 5 |
| overall dimensions (W × L × H) | 1115 × 980 × 980 |
| Parameter | Value |
|---|---|
| displacement measurement resolution V, W, Z | 20 |
| resulting feedback resolution x | 17 |
| resulting feedback resolution y | 10 |
| angular resolution | |
| angular resolution , | 40 |
| Parameter | Value |
|---|---|
| linear actuator force constant | |
| linear actuator motor constant | / |
| planar drive motor constant | / |
| Function | Description | Design Choice |
|---|---|---|
| dynamic actuation | generation of vertical driving force with high sensitivity and high bandwidth | voice coil actuator, moving coil |
| quasistatic actuation | generation of vertical driving force with high sensitivity and low bandwidth | pneumatic actuator with contactless sealing |
| planar guiding | frictionless support of the moving body | planar air bearing pad |
| vertical guiding | frictionless internal guiding for 25 mm vertical stroke | cylindrical air bushing |
| displacementmeasurement | internal measurement of the LAU displacement | optical encoder with linear scale |
| Subsystem | Parameter | Value |
|---|---|---|
| mechanics | z—strokemass moving part mass stationary part size (ØD × H) | 25 Ø83 × 90 |
| voice coil actuator | force constant motor constant maximum current current increment (LSB) | / |
| pneumatic actuator | force constant maximum pressure pressure increment (LSB) | bar |
| aerostatic guiding | supply pressure supply air flow drain air flow | bar NLPM NLPM |
| encoder feedback system | scale pitch measurement resolution | 256 4 |
| Specifications | -axis | -axis | -axis | -axis | -axis | -axis |
|---|---|---|---|---|---|---|
| Gain margin | dB | dB | dB | dB | dB | dB |
| Phase margin | ||||||
| Bandwidth |
| Commanded Helix Path | RMS Servo Errors | RMS Currents (Planar Coils) | RMS Currents (Lifting Modules) |
|---|---|---|---|
|
Ø40
×
20
7 | |||
|
Ø40
×
50
7 | |||
| Ø40 × 5 7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hesse, S.; Huaman, A.; Katzschmann, M.; Leistritz, B.; Herzog, L. NPS6D200—A Long Range Nanopositioning Stage with 6D Closed Loop Control. Appl. Sci. 2024, 14, 6972. https://doi.org/10.3390/app14166972
Hesse S, Huaman A, Katzschmann M, Leistritz B, Herzog L. NPS6D200—A Long Range Nanopositioning Stage with 6D Closed Loop Control. Applied Sciences. 2024; 14(16):6972. https://doi.org/10.3390/app14166972
Chicago/Turabian StyleHesse, Steffen, Alex Huaman, Michael Katzschmann, Bianca Leistritz, and Ludwig Herzog. 2024. "NPS6D200—A Long Range Nanopositioning Stage with 6D Closed Loop Control" Applied Sciences 14, no. 16: 6972. https://doi.org/10.3390/app14166972