
Harmonic Suppression in Permanent Magnet Synchronous Motor Currents Based on Quasi-Proportional-Resonant Sliding Mode Control
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. A Harmonic Model of PMSMs
3. The Dynamic Harmonic Compensation Sliding Mode Control Method
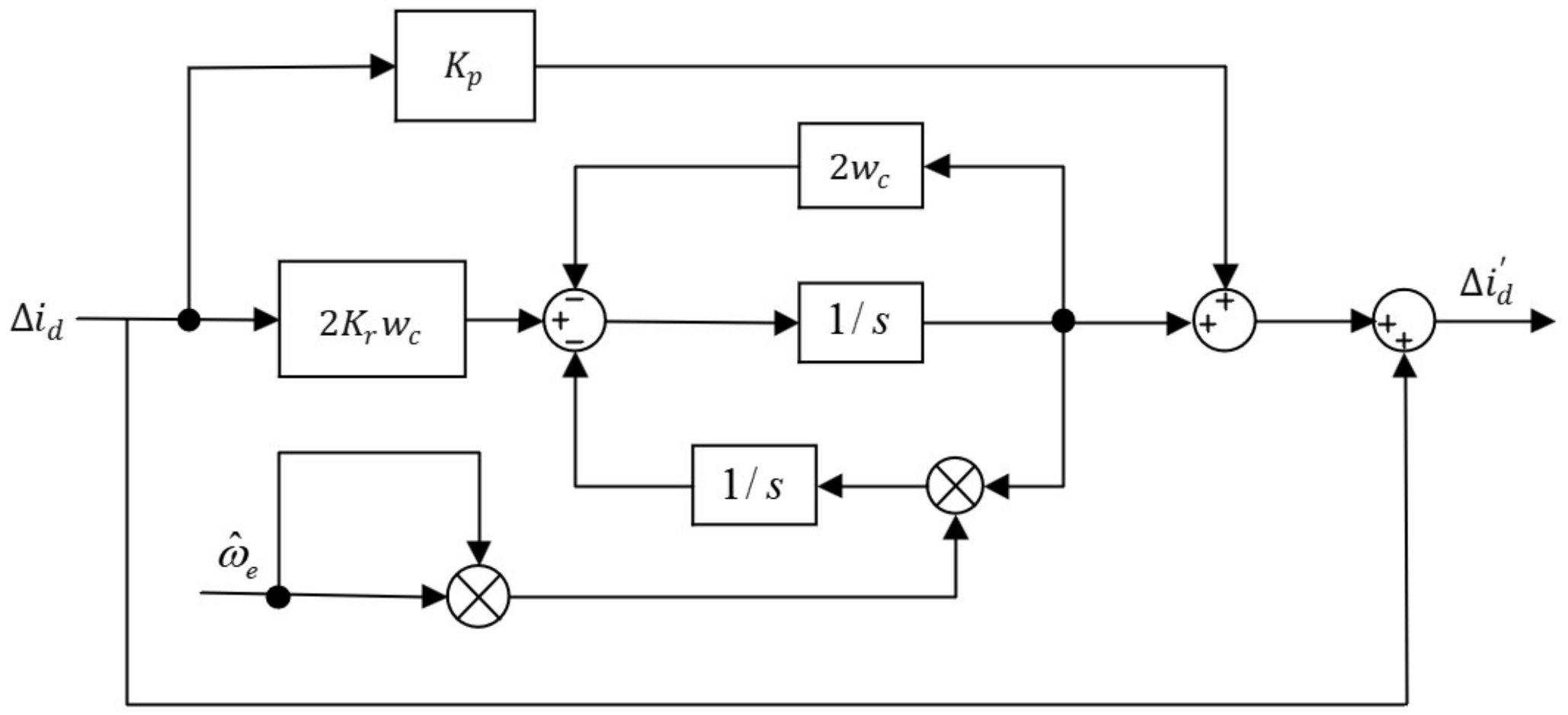
3.1. Proportional Resonant Controller
3.2. Design of the Current Error-Quasi-Proportional-Resonant-Sliding Mode Control Surface
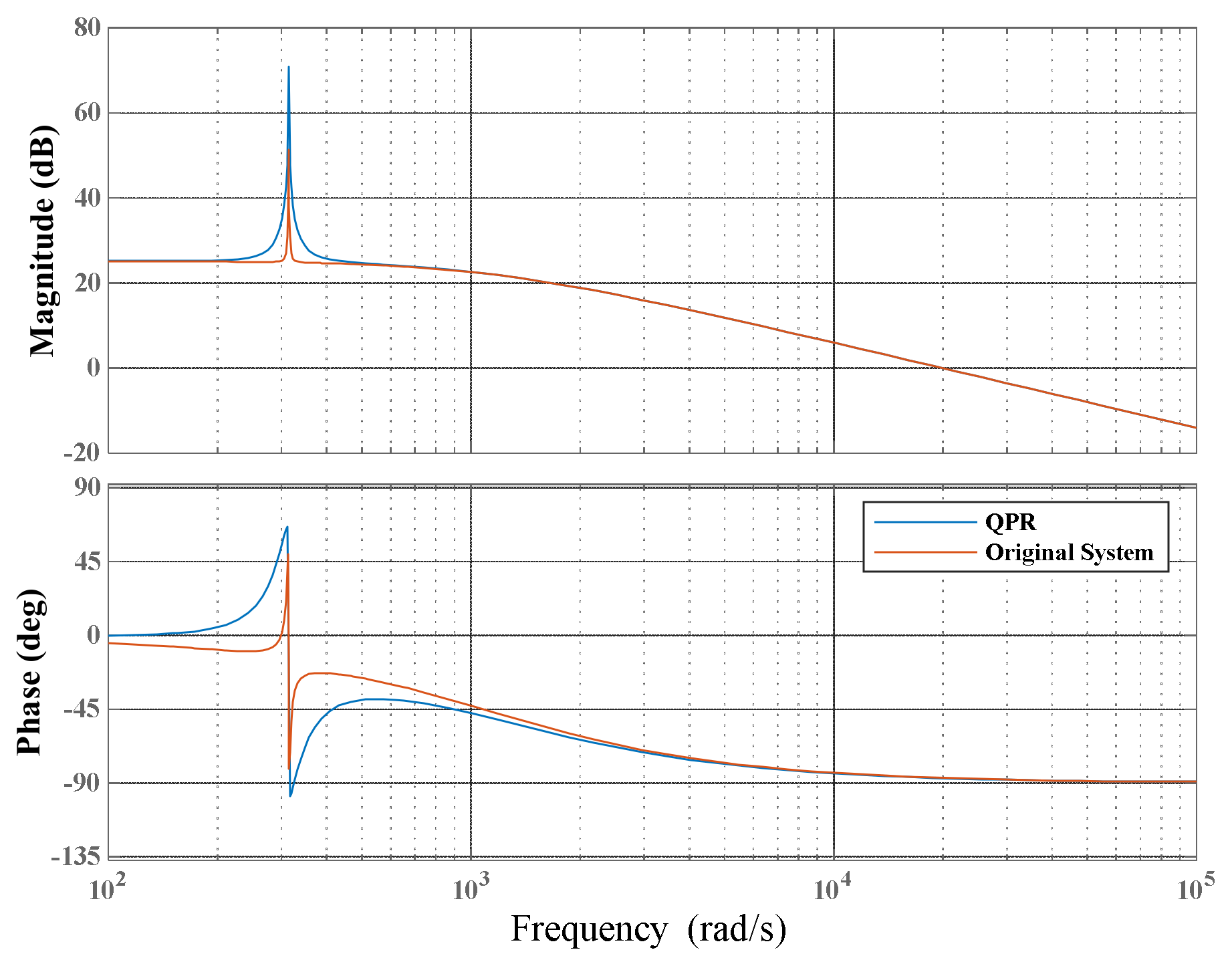
3.3. Theoretical Analysis of QPR-Cascaded SMC
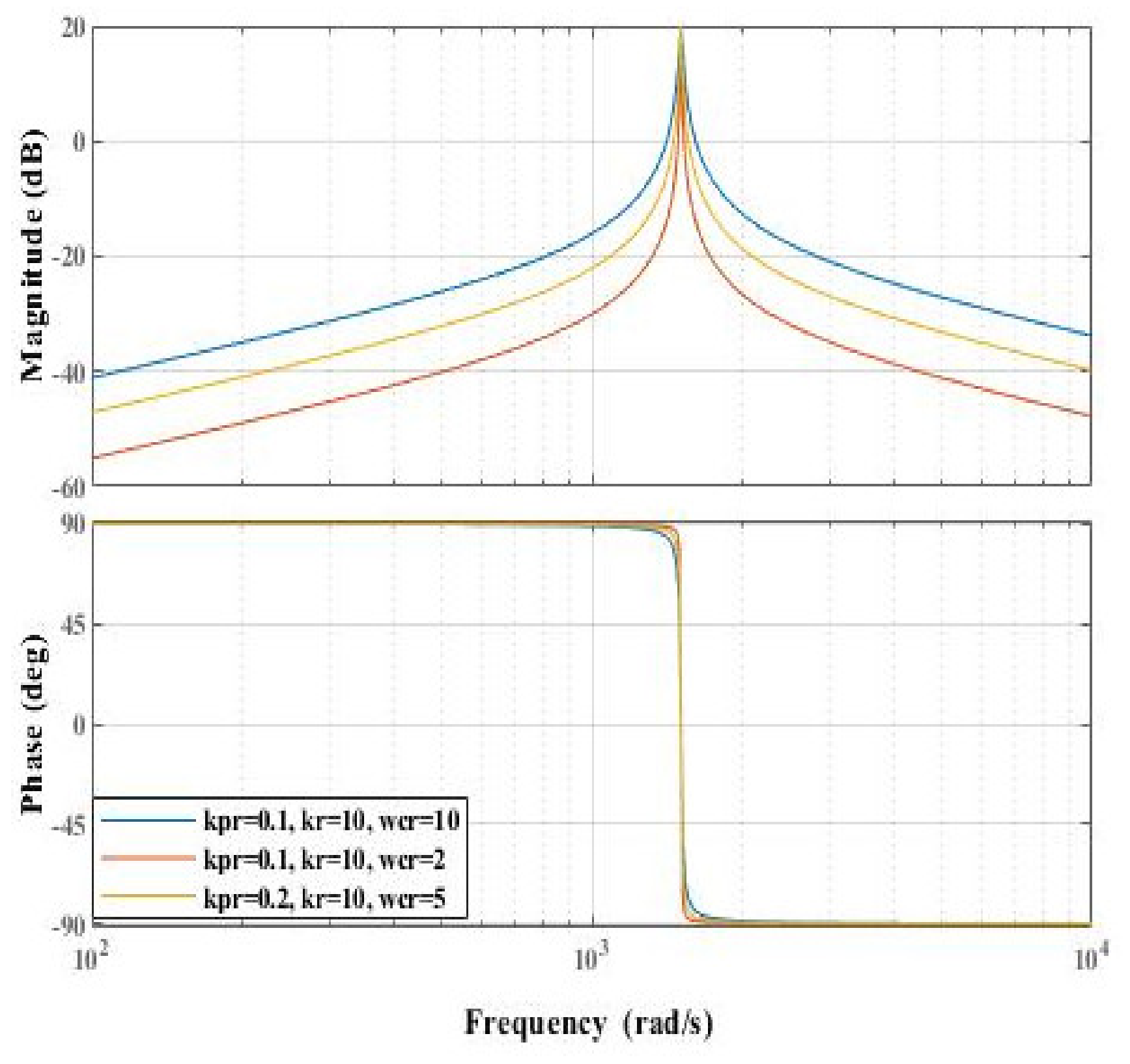
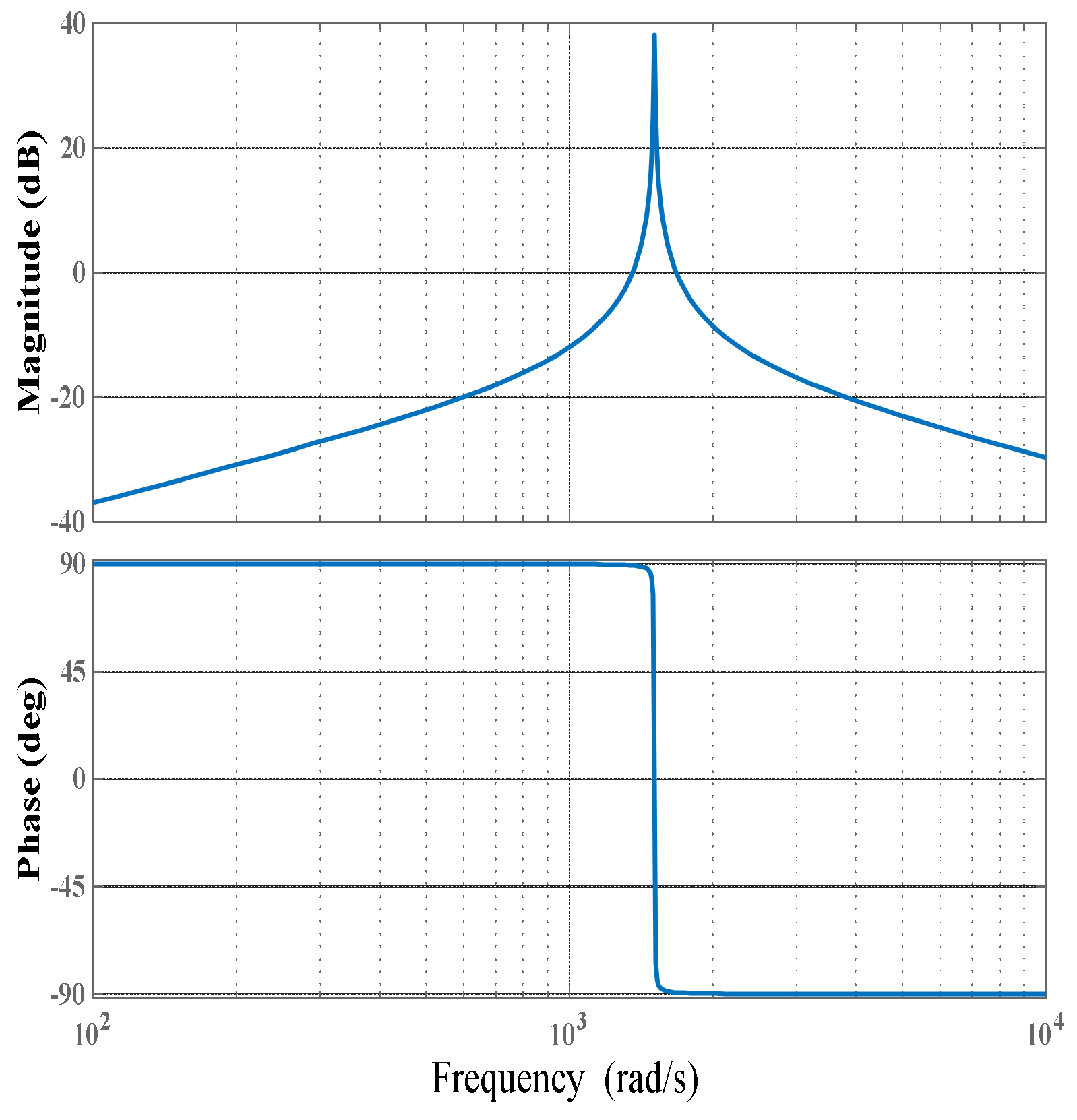
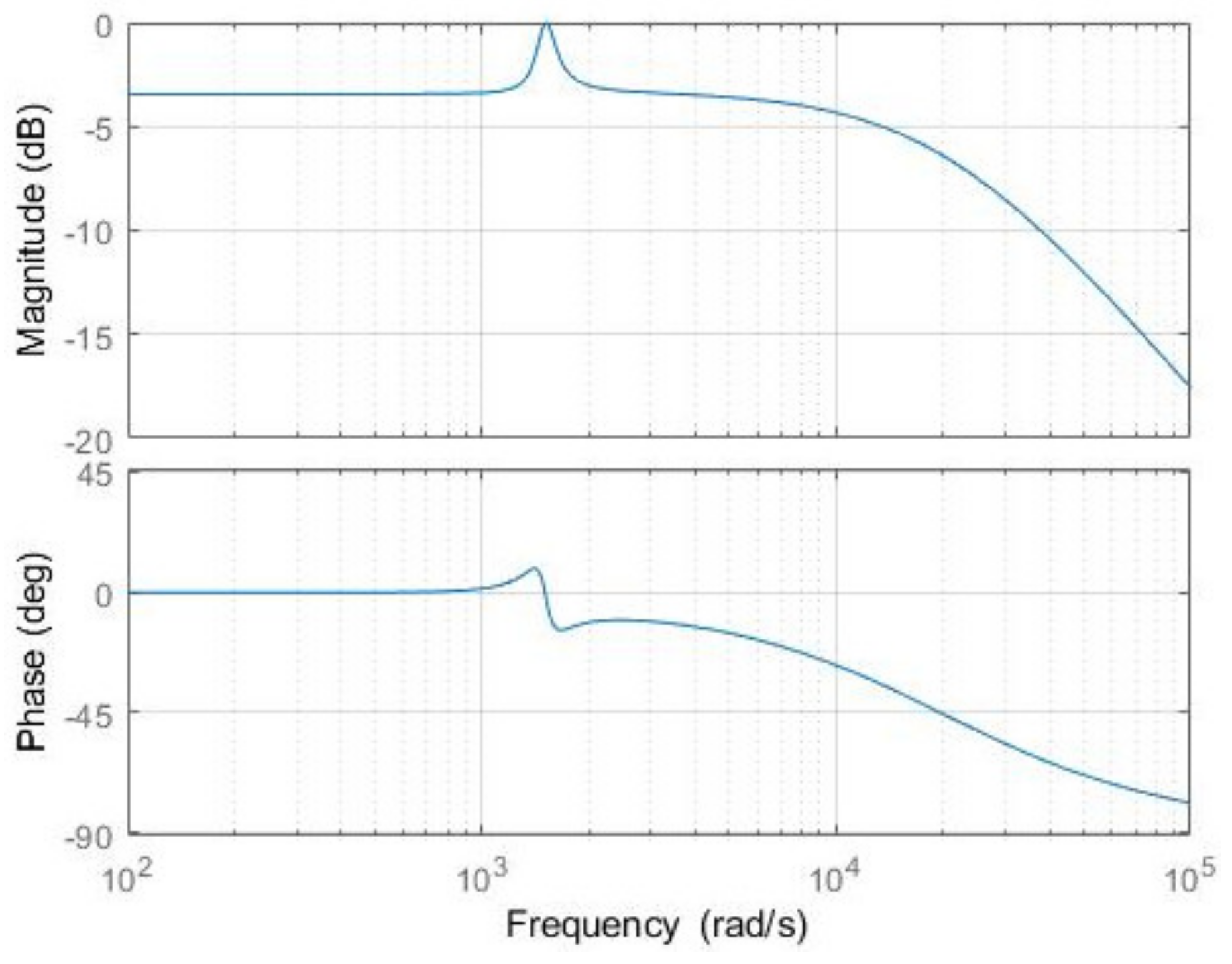
3.4. Parameter Design of the Proportional Resonant Filter
- When the proportional gain coefficient decreases, the overall gain of the controller decreases, the phase margin increases, and the effect on bandwidth is minimal.
- Increasing enhances the gain at the resonant frequency, resulting in a faster dynamic response. Different values of primarily affect the attenuation of frequency signals other than at the resonant point; the smaller is, the lower the gain at other frequencies, but it does not impact the gain at the resonant point, thus having a minimal effect on bandwidth.
- Increasing broadens the bandwidth of the resonant gain band without affecting the gain at the resonant point. Conversely, decreasing narrows the bandwidth of the resonant gain band, improving adaptability to frequency variations. Therefore, the cutoff frequency mainly influences the bandwidth of the controller; the smaller is, the better the frequency selection characteristics of the controller. However, due to current frequency fluctuations caused by harmonics in the AC drive system, a smaller results in greater gain fluctuations of the controller, making the system stability more susceptible to influence. Hence, the value of should not be too small.
3.5. Stability Analysis
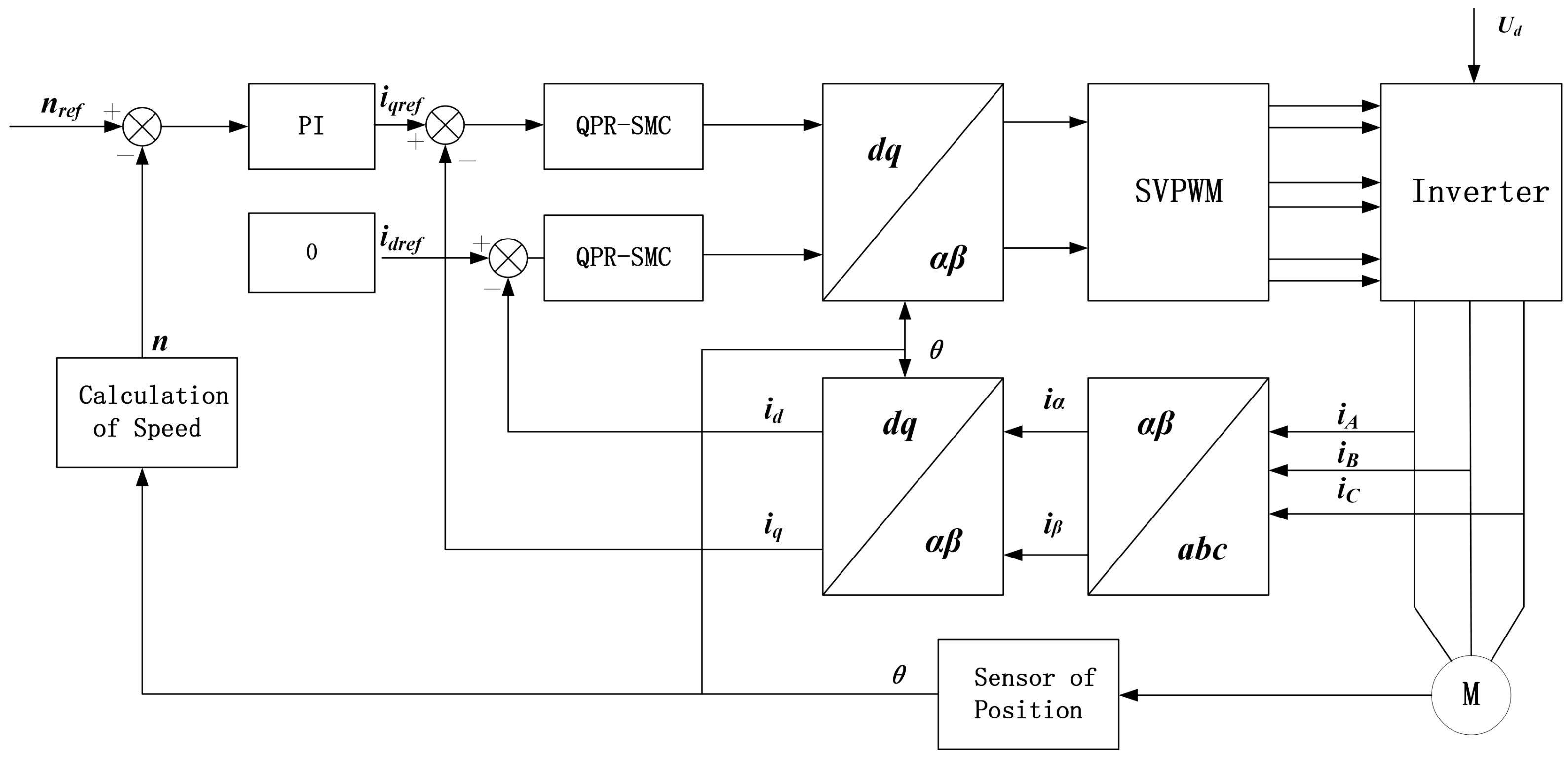
3.6. System Structure
4. Experimental Verification
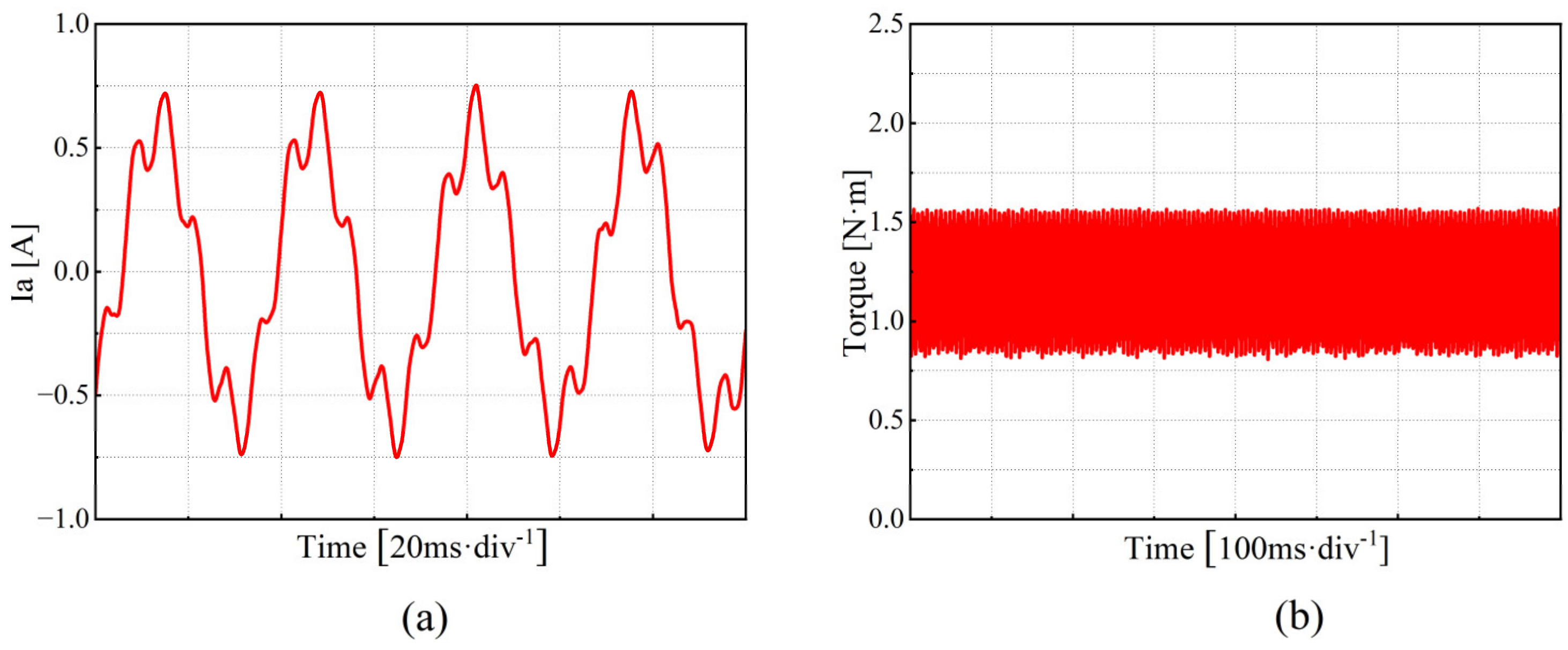
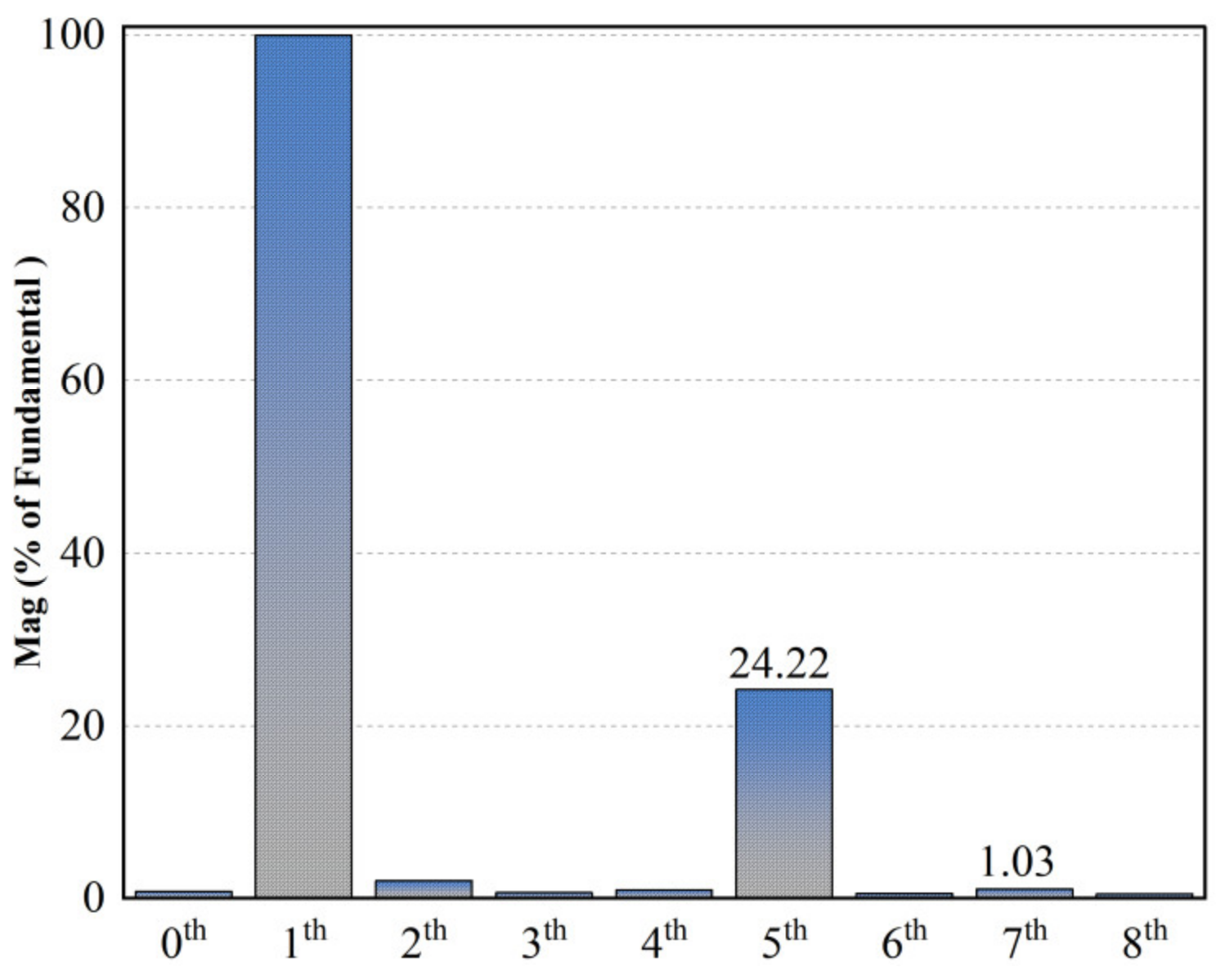
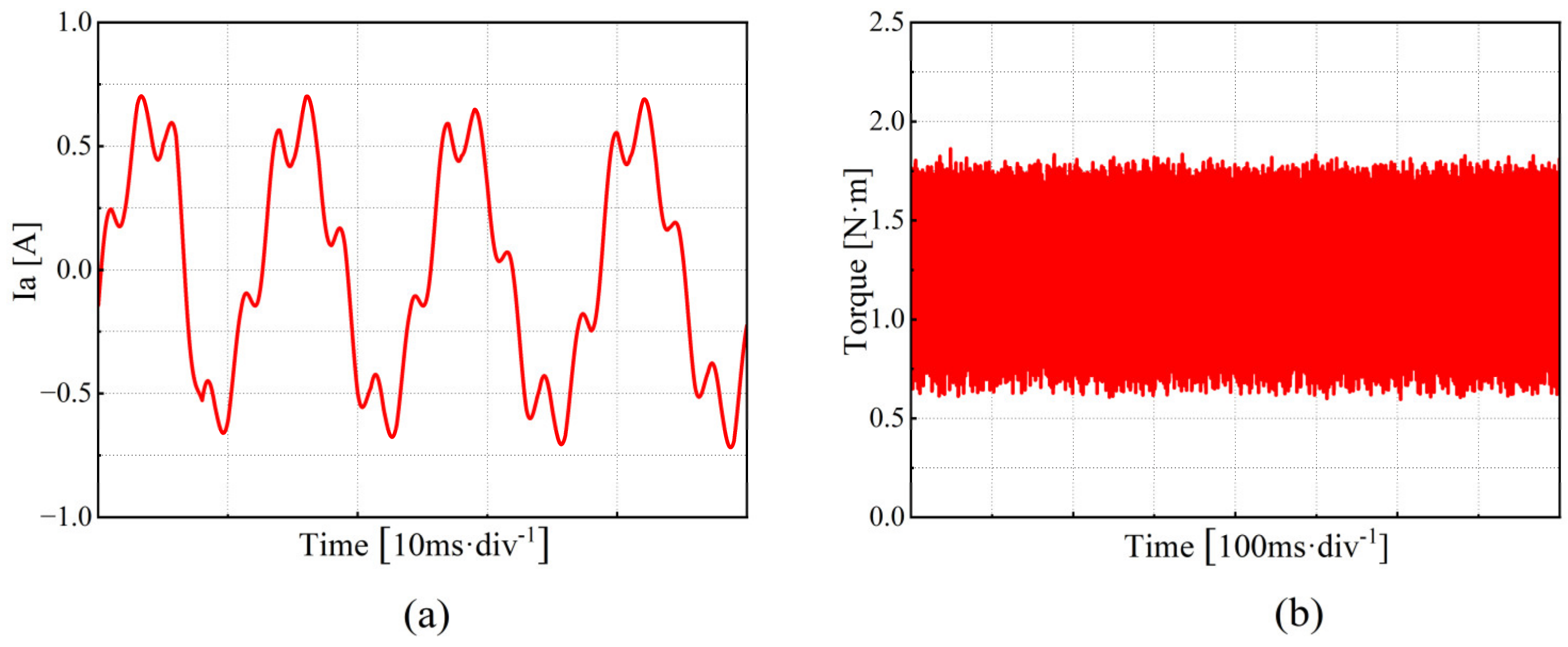
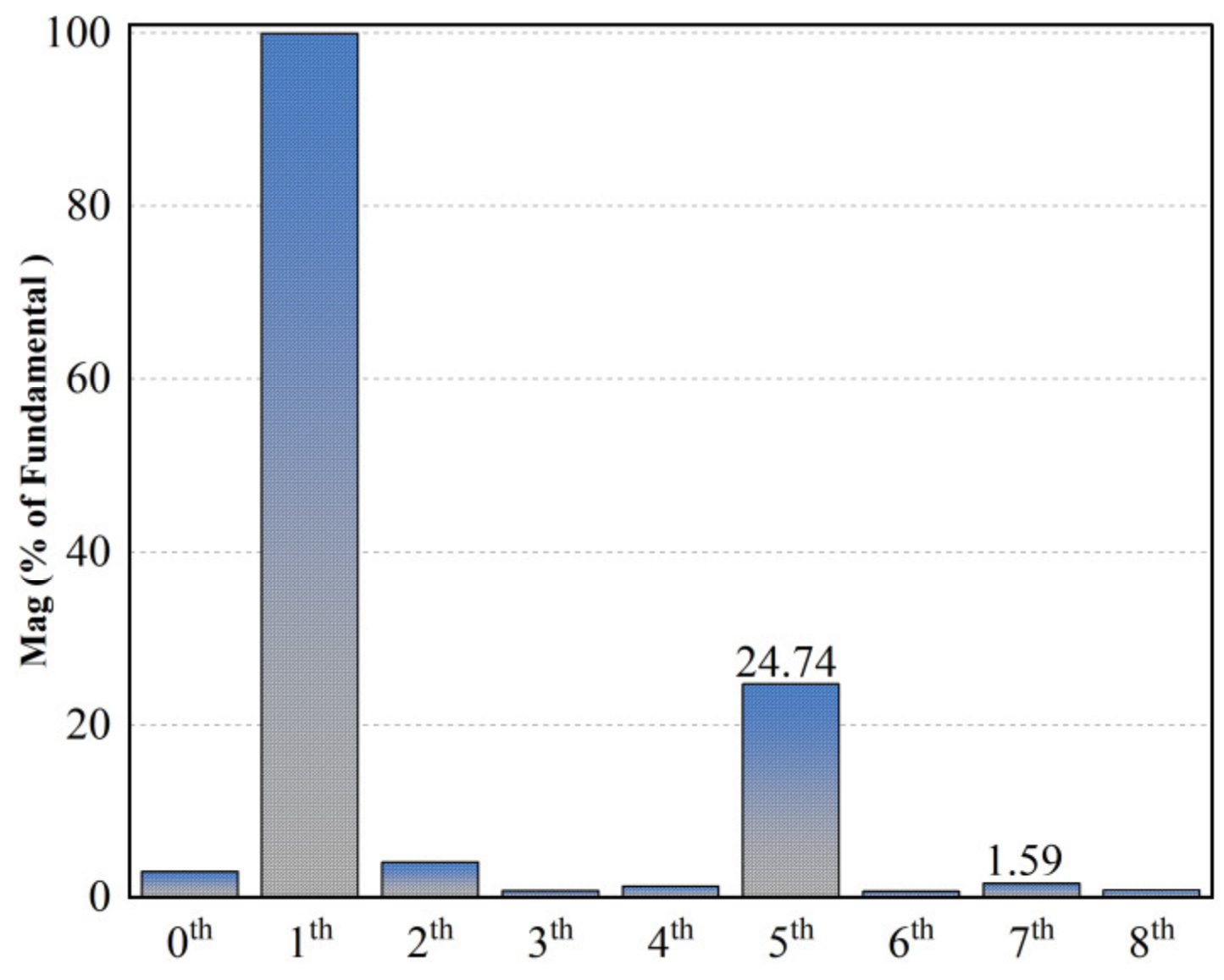
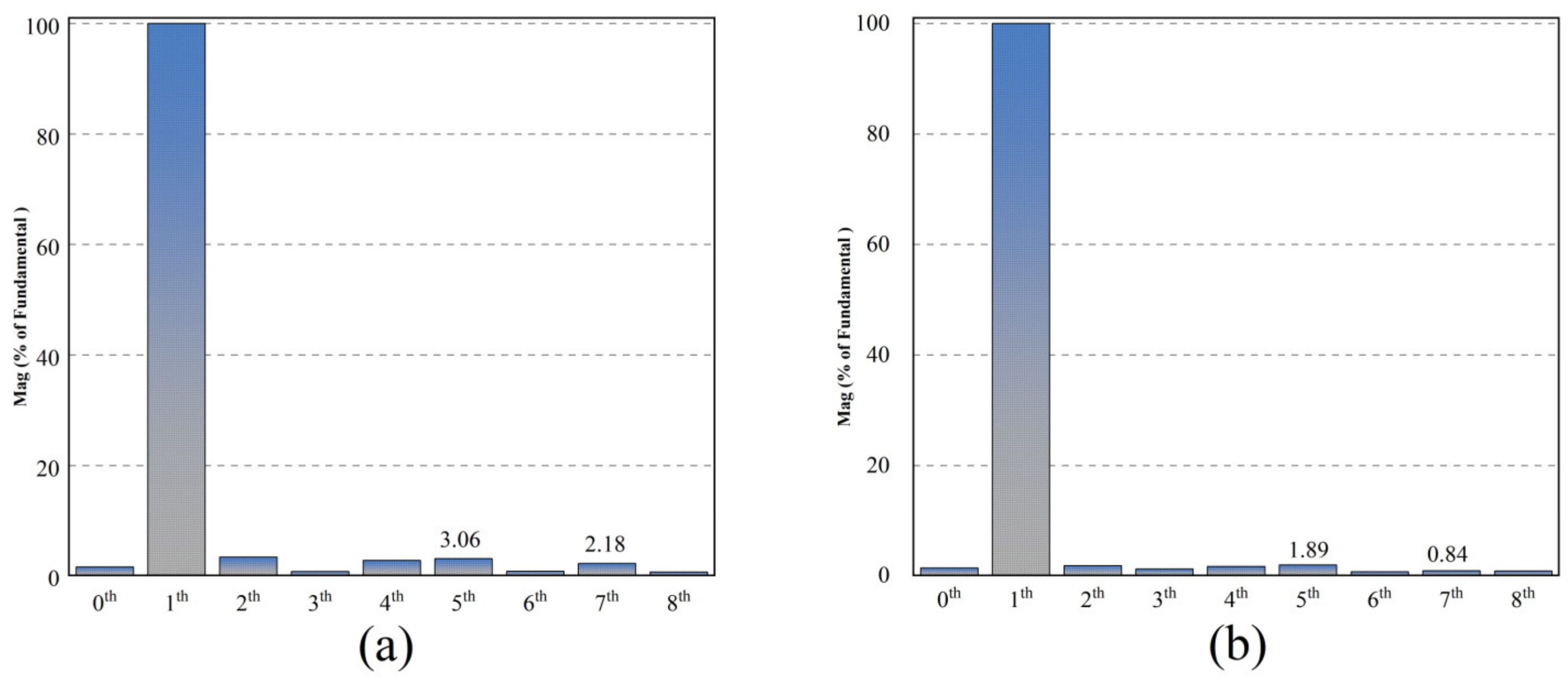
4.1. Analysis of the Performance of the Traditional PI Control Method in Current Harmonic Suppression
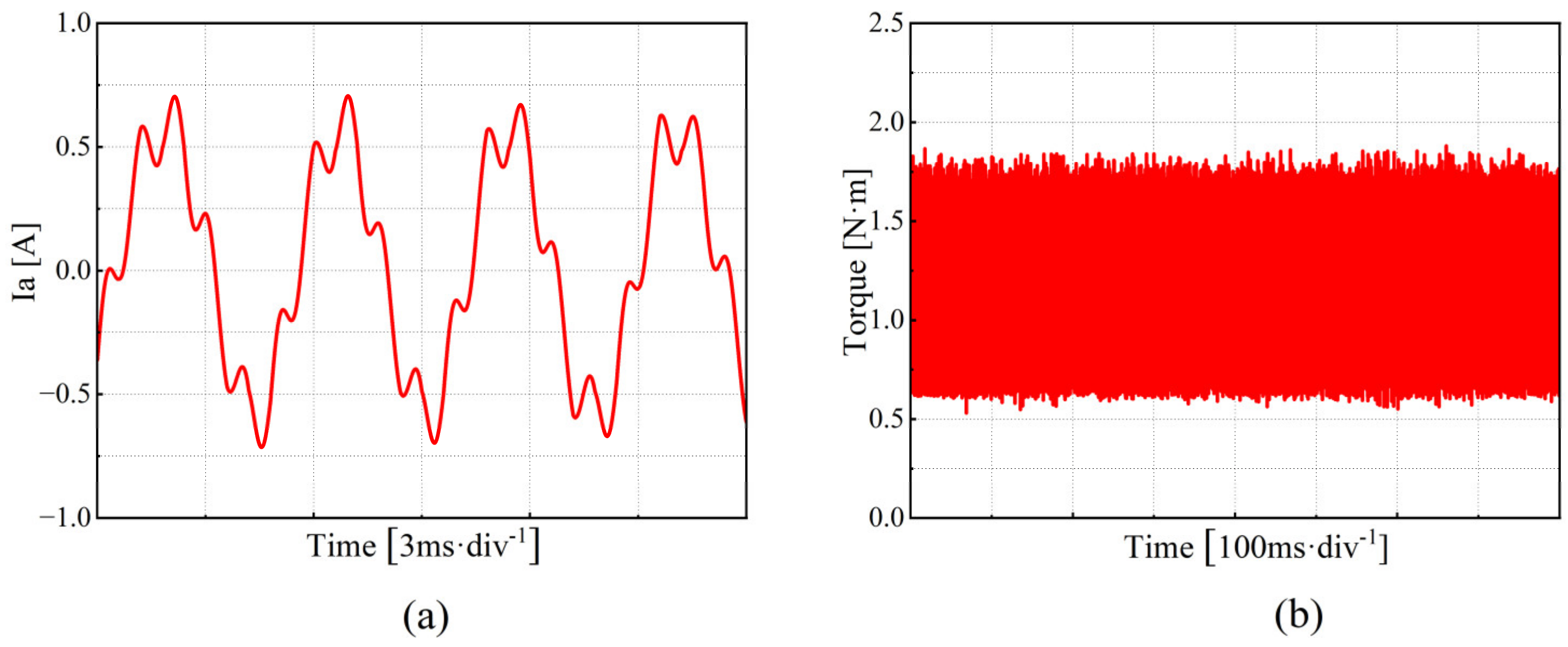
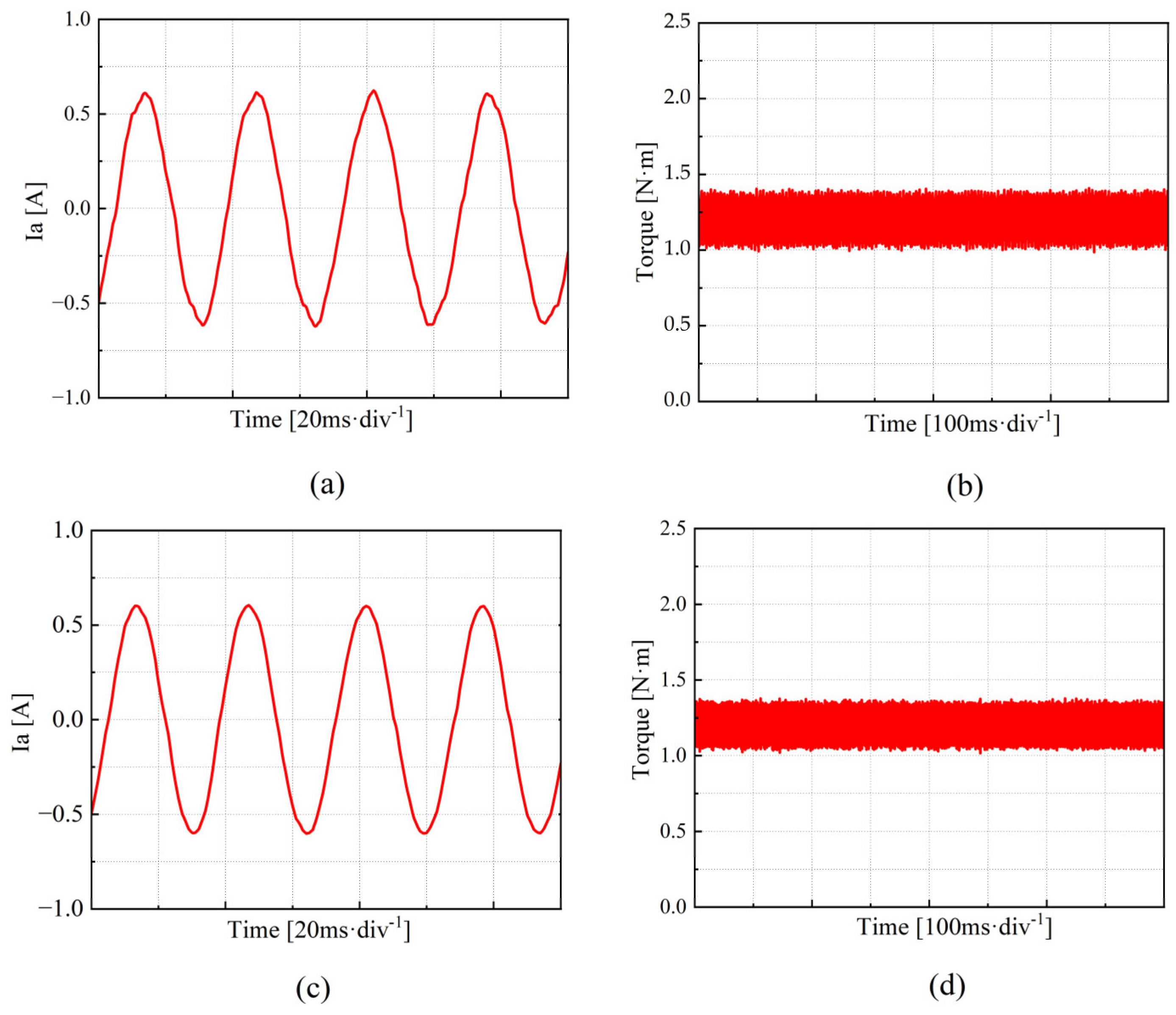
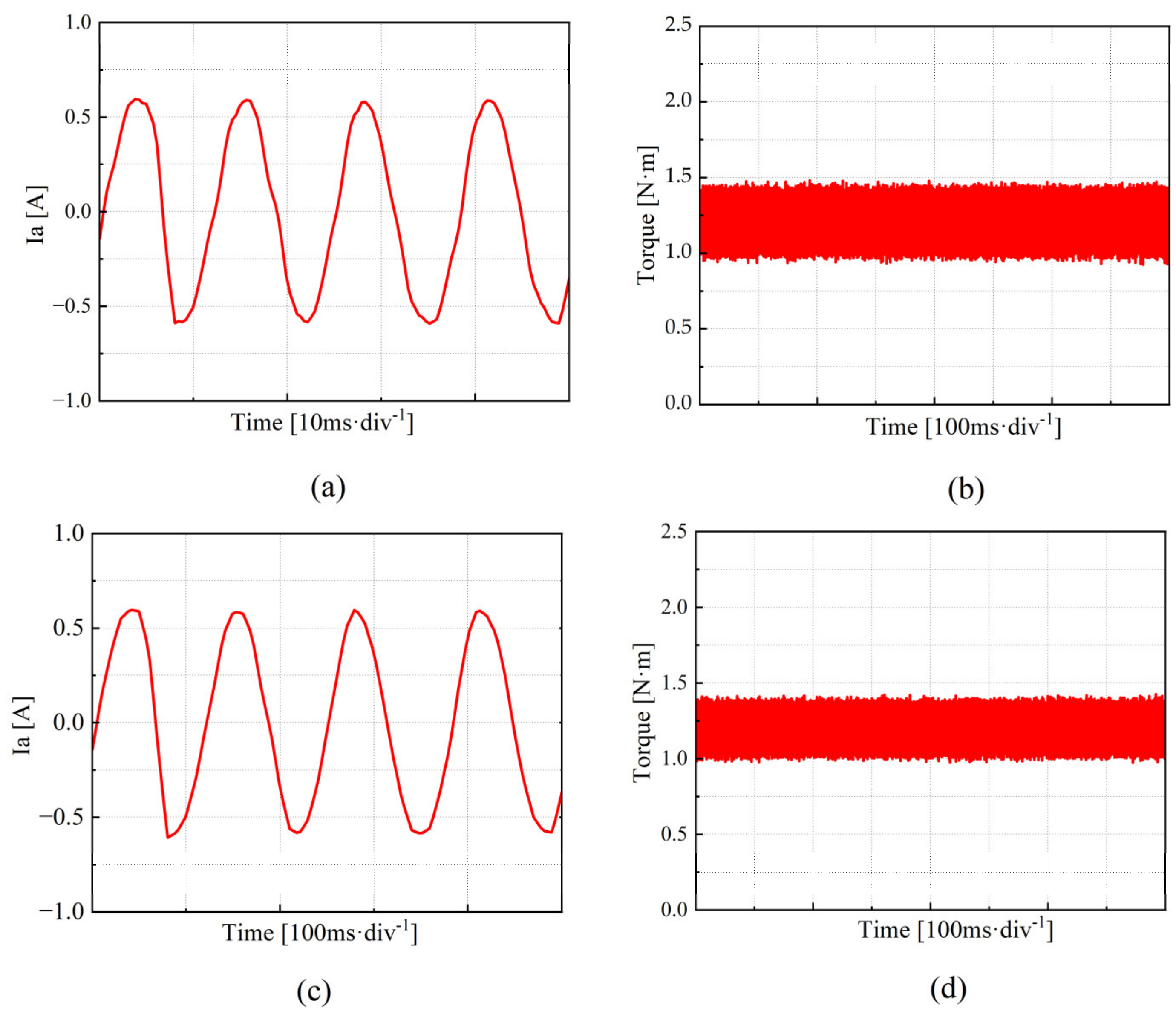
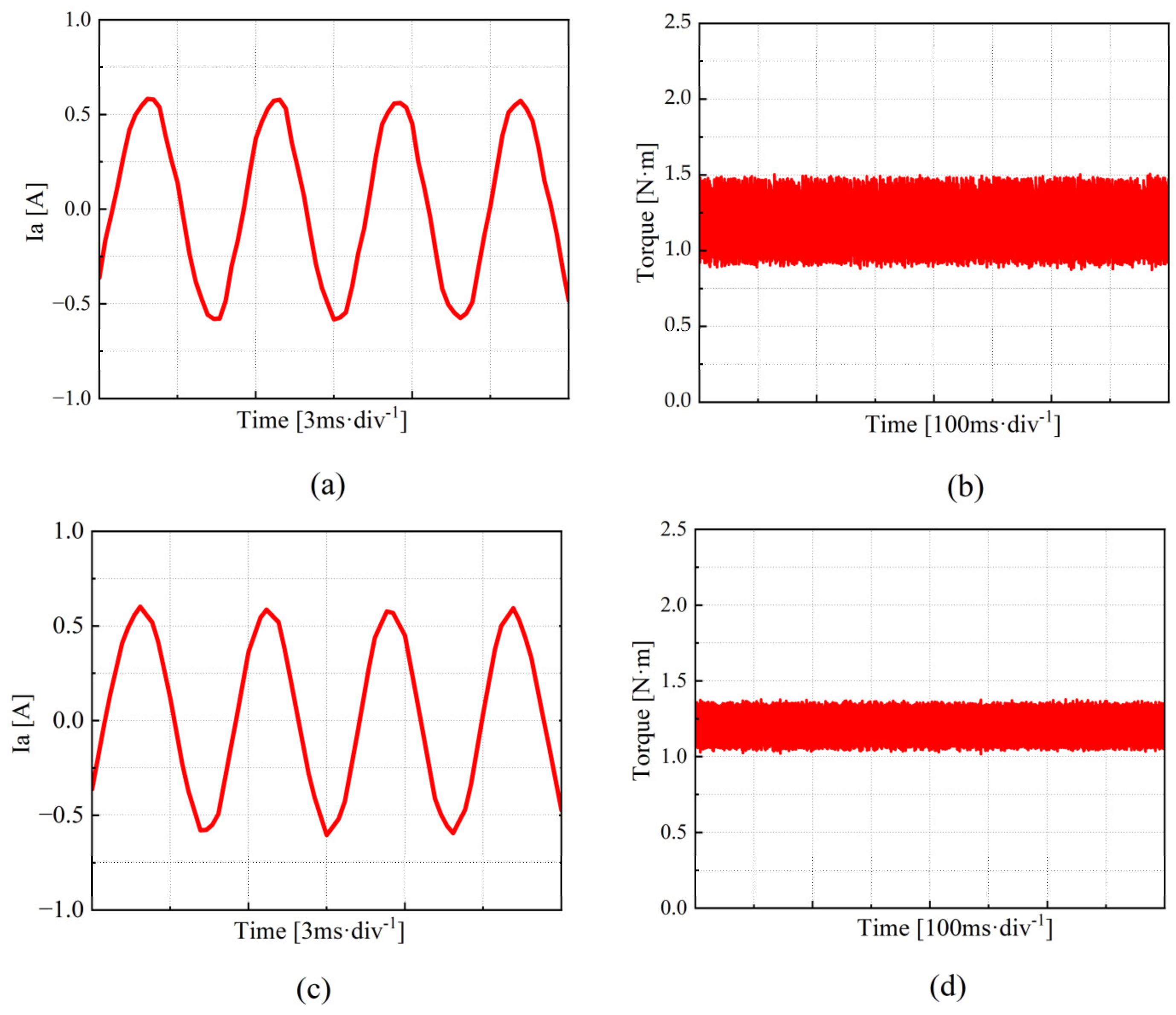
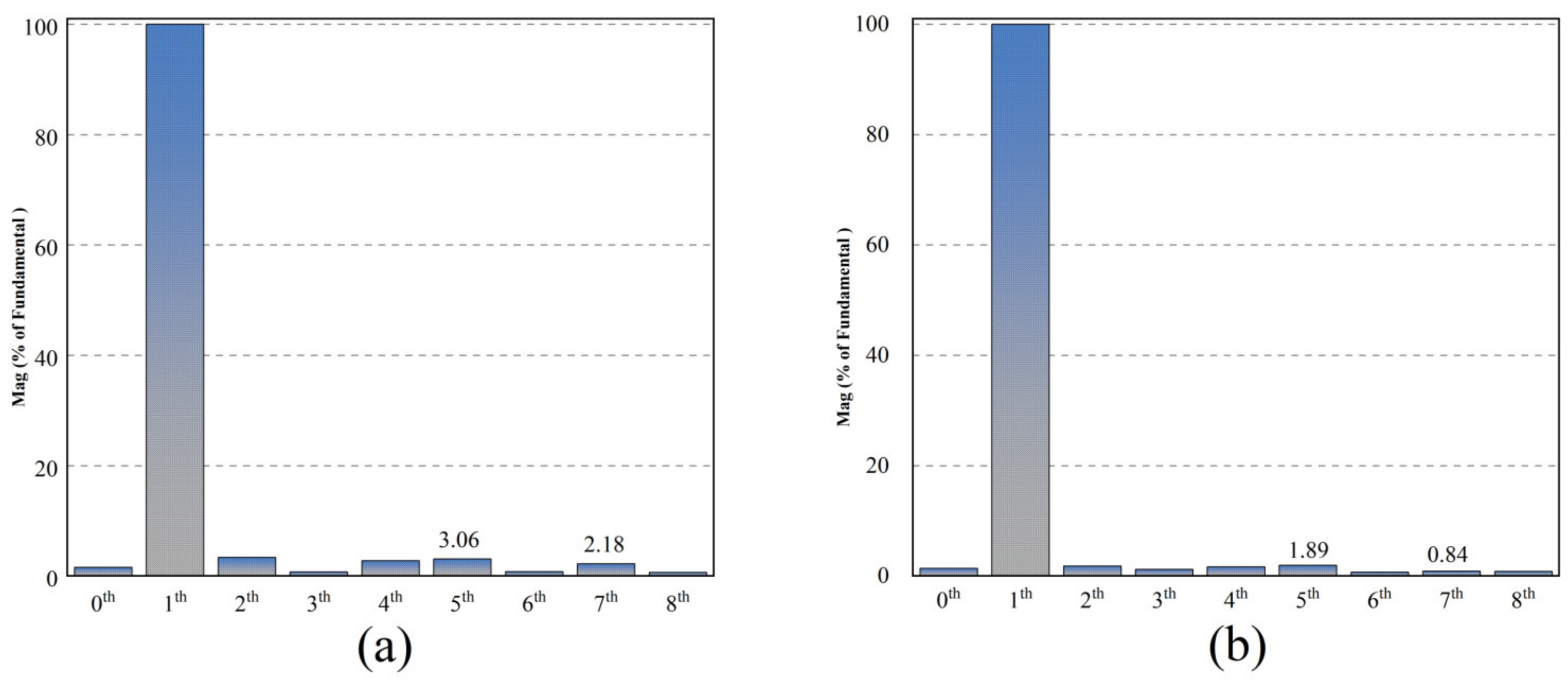
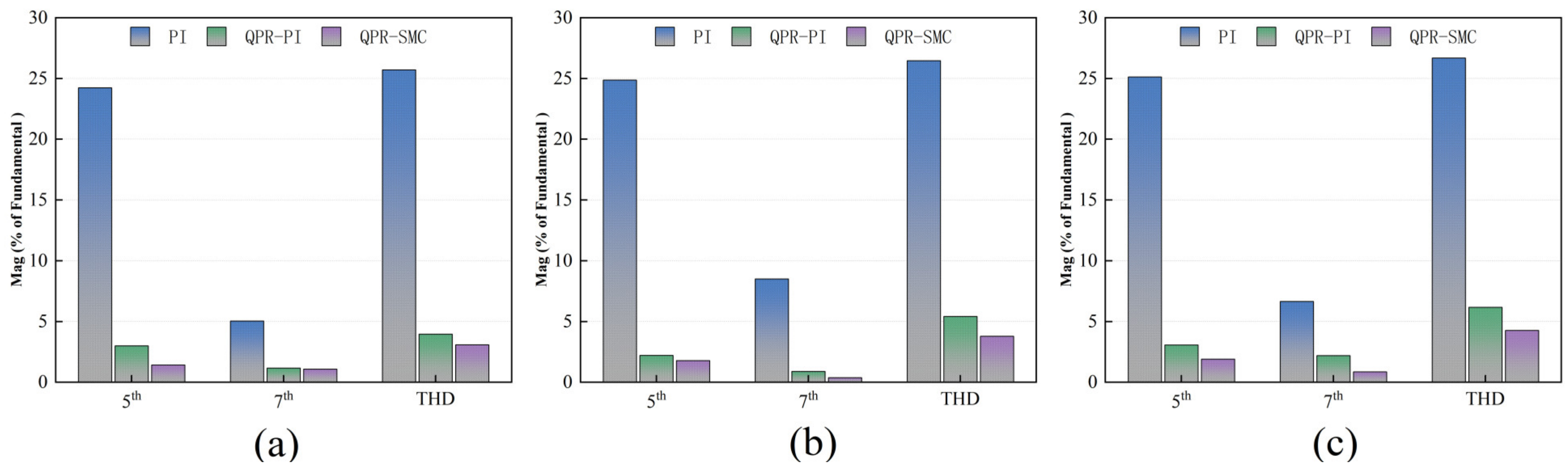
4.2. Comparison of QPR-PI and QPR-SMC Control Strategies in Current Harmonic Suppression Performance
5. Conclusions
- The resonant frequency of the proportional resonant controller can be designed and adjusted as needed, allowing for selective suppression of harmonics at specific frequencies without causing distortion at other frequencies.
- Traditional QPR-PI controllers have limited effectiveness in dealing with nonlinear disturbances such as dead time and voltage drops, which introduce harmonics, thereby affecting current harmonic suppression. Compared to the traditional QPR-PI feedforward compensation method, the QPR-SMC method results in lower harmonic content and provides better current harmonic suppression, making the stabilized current waveform closely resemble the ideal sinusoidal waveform.
- To verify the correctness of the proposed scheme, a corresponding test platform was established, and comparative experiments were conducted. The results show that this method can adaptively cancel the sixth harmonic component in the stator voltage in the d–q axis system, successfully reducing the fifth and seventh harmonic components in the three-phase current, and significantly mitigating motor torque ripple.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Khanh, P.Q.; Anh, H.P.H. Hybrid optimal fuzzy Jaya technique for advanced PMSM driving control. Electr. Eng. 2023, 105, 3629–3646. [Google Scholar] [CrossRef]
- Rafaq, M.S.; Midgley, W.; Steffen, T. A Review of the State of the Art of Torque Ripple Minimization Techniques for Permanent Magnet Synchronous Motors. IEEE Trans. Ind. Inform. 2024, 20, 1019–1031. [Google Scholar] [CrossRef]
- Minghe, T.; Bo, W.; Yong, Y.; Xing, M.; Qinghua, D.; Dianguo, X. Proportional resonant-based active disturbance rejection control for speed fluctuation suppression of PMSM drives. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 1–14 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Wu, L.; Chen, H.; Yu, T.; Sun, C.; Wang, L.; Ye, X.; Zhai, G. Robust Design Optimization of the Cogging Torque for a PMSM Based on Manufacturing Uncertainties Analysis and Approximate Modeling. Energies 2023, 16, 663. [Google Scholar] [CrossRef]
- Wang, Y.; Gao, Y.; Zhao, C.; Li, X. Iterative Learning Based Torque Ripple Suppression of Flux-Modulation Double-Stator Machine. IEEE Trans. Ind. Electron. 2022, 69, 6645–6656. [Google Scholar] [CrossRef]
- Li, Z.; Kong, W.; Cheng, Y.; Qu, R. An Iterative Learning Based Direct Torque Control Strategy of DC-Biased Vernier Reluctance Machines for Torque Ripple Reduction. IEEE Trans. Power Electron. 2023, 38, 15456–15466. [Google Scholar] [CrossRef]
- Bi, G.; Zhang, G.; Wang, G.; Wang, Q.; Hu, Y.; Xu, D. Adaptive Iterative Learning Control-Based Rotor Position Harmonic Error Suppression Method for Sensorless PMSM Drives. IEEE Trans. Ind. Electron. 2022, 69, 10870–10881. [Google Scholar] [CrossRef]
- Li, H.; Guo, Y.; Xu, Q. PMSM Torque Ripple Suppression Method Based on SMA-Optimized ILC. Sensors 2023, 23, 9317. [Google Scholar] [CrossRef]
- Qing, H.; Zhang, C.; Chai, X.; He, H.; Wang, X. Research on grid-connected harmonic current suppression of three-phase four-wire energy storage inverters. J. Power Electron. 2023, 23, 972–983. [Google Scholar] [CrossRef]
- Li, J.; Chen, P.; Pan, Y.; Liu, J.; Chen, Q.; Cui, P. High-Precision Suppression of Harmonic Vibration Force by Repetitive Controller With Triple-Loop Structure. IEEE Trans. Power Electron. 2023, 38, 10821–10828. [Google Scholar] [CrossRef]
- Cai, K.; Deng, Z.; Peng, C.; Li, K. Suppression of Harmonic Vibration in Magnetically Suspended Centrifugal Compressor Using Zero-Phase Odd-Harmonic Repetitive Controller. IEEE Trans. Ind. Electron. 2020, 67, 7789–7797. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, J.; Han, X.; Zhou, Y. Adaptive odd repetitive control for magnetically suspended rotor harmonic currents suppression. J. Vib. Control 2023, 29, 2077–2085. [Google Scholar] [CrossRef]
- Li, D.; Zhao, D. Single Current Feedback Control Strategy of an LCL Grid-Connected Inverter Based on GI-ESO and Delay Compensation. Energies 2022, 15, 2893. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, X.; Yang, J.; Yan, L.; Deng, R. Smooth and Robust Current Control of PMSMs With Decoupling-Type Extended State Observers. IEEE Trans. Ind. Electron. 2023, 71, 10377–10388. [Google Scholar] [CrossRef]
- Memije Garduno, D.; Rodriguez Rivas, J.J.; Carranza Castillo, O.; Ortega Gonzalez, R.; Rodarte Gutierrez, F.E. Current Distortion Rejection in PMSM Drives Using an Adaptive Super-Twisting Algorithm. IEEE Trans. Energy Convers. 2022, 37, 927–934. [Google Scholar] [CrossRef]
- Li, Y.; Hu, Y.; Zhu, Z.Q. Current Harmonics and Unbalance Suppression of Dual Three-Phase PMSM Based on Adaptive Linear Neuron Controller. IEEE Trans. Energy Convers. 2023, 38, 2353–2363. [Google Scholar] [CrossRef]
- Chu, Y.; Hou, S.; Wang, C.; Fei, J. Recurrent-Neural-Network-Based Fractional Order Sliding Mode Control for Harmonic Suppression of Power Grid. IEEE Trans. Ind. Inform. 2023, 19, 9979–9990. [Google Scholar] [CrossRef]
- Chen, G.; Xu, L. Adaptive quasi-proportional resonant control with parameter estimation for PMSM sensorless control. Adv. Mech. Eng. 2023, 15, 16878132231154069. [Google Scholar] [CrossRef]
- Xie, F.; Xu, J.; Shen, M.; Zheng, Z. Current harmonic suppression strategy for permanent magnet synchronous motor based on small phase angle resonant controller. IET Electr. Power Appl. 2024, 18, 556–564. [Google Scholar] [CrossRef]
- Cao, H.; Deng, Y.; Li, H.; Wang, J.; Liu, X.; Sun, Z.; Yang, T. Generalized Active Disturbance Rejection With Reduced-Order Vector Resonant Control for PMSM Current Disturbances Suppression. IEEE Trans. Power Electron. 2023, 38, 6407–6421. [Google Scholar] [CrossRef]
- Zhang, Q.; Guo, H.; Guo, C.; Liu, Y.; Wang, D.; Lu, K.; Zhang, Z.; Zhuang, X.; Chen, D. An adaptive proportional-integral-resonant controller for speed ripple suppression of PMSM drive due to current measurement error. Int. J. Electr. Power Energy Syst. 2021, 129, 106866. [Google Scholar] [CrossRef]
- Pal, K.; Kumar, S.; Singh, B.; Kandpal, T.C. Enhanced resonant two-degree of freedom-based PID controller for grid-integrated PV power generating system. IET Renew. Power Gener. 2020, 14, 3550–3557. [Google Scholar] [CrossRef]
- Lyu, J.; Yan, Y.; Wu, F.; Sun, Z.; Farooq, A.; Xu, W. Parameter co-design of active damping loop and grid current controller for a 3-phase LCL-filtered grid-connected inverter. Int. J. Electr. Power Energy Syst. 2021, 133, 107203. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, K.; Zhang, Y.; Lu, W.; Qi, Y.; Shi, W. Harmonic Suppression in Permanent Magnet Synchronous Motor Currents Based on Quasi-Proportional-Resonant Sliding Mode Control. Appl. Sci. 2024, 14, 7206. https://doi.org/10.3390/app14167206
Wu K, Zhang Y, Lu W, Qi Y, Shi W. Harmonic Suppression in Permanent Magnet Synchronous Motor Currents Based on Quasi-Proportional-Resonant Sliding Mode Control. Applied Sciences. 2024; 14(16):7206. https://doi.org/10.3390/app14167206
Chicago/Turabian StyleWu, Kelu, Yongchao Zhang, Wenqi Lu, Yubao Qi, and Weimin Shi. 2024. "Harmonic Suppression in Permanent Magnet Synchronous Motor Currents Based on Quasi-Proportional-Resonant Sliding Mode Control" Applied Sciences 14, no. 16: 7206. https://doi.org/10.3390/app14167206