1. Introduction
First-order Initial Value Problems (IVPs) play a fundamental role in theoretical and numerical analyses of physical and engineering problems [
1,
2,
3,
4,
5]. Theoretically, any higher order ordinary differential equations (ODEs) can equivalently be transformed into systems of first-order ODEs and hence successful numerical methods for the first-order IVPs can also be applied to the Boundary Value Problems (BVPs) in ODEs. Numerically, it is often easier to develop straightforward, flexible and robust methods since only the solution functions are solved for without the need to consider solution derivatives.
For adaptive analysis of the first-order IVPs, error estimation is required in certain kinds of norm. Instead of a thorough survey of various relevant numerical methods, the most used Runge–Kutta–Fehlberg method [
3,
6] is worth mentioning on account of its representativeness and the availability of algorithms for adaptive analysis. The conventional adaptive approach based on the Runge–Kutta method estimates the truncation errors of a fourth-order Runge–Kutta method using the solution of a fifth-order Runge–Kutta method. This approach is simple and effective and can effectively control the truncation errors to a certain extent. However, the solution obtained by this method is in a discrete form, and it is impossible to measure the errors by maximum norm, and it is difficult to use the
norm as well. Moreover, this method is not
A-stable for first-order IVPs [
6], which flaws its flexibility and reliability. Although many research works on this method have been conducted to improve this method in recent years [
7,
8,
9], the above-mentioned problems have not been fundamentally resolved.
The conventional Galerkin finite element method (FEM) [
10,
11,
12] is a convenient and effective tool for both BVPs and IVPs [
4,
13,
14,
15,
16,
17,
18,
19]. Although, for the second-order equation of motion in structural dynamics analysis, the conventional Galerkin FEM can only generate conditionally stable algorithms, it can generate unconditionally stable algorithms if the second-order IVPs are transformed to the first-order IVPs in system of ODEs [
13,
17,
20]. Specifically, characterized by piecewise polynomial spaces of degree
, the conventional Galerkin FEM for the first-order IVPs [
13,
17] can generate a one-step and
A-stable method with
accuracy within elements, and
accuracy at mesh points (element end nodes) [
13] for nodal solutions (
being the maximum element size), which is particularly advantageous for a procedure of the time integration type. Recently, the authors of this paper proposed a condensed Galerkin element [
20] for the first-order IVPs, which has been proved to be able to produce exactly identical nodal solutions as the conventional element of degree
for the IVPs with constant coefficients, and hence gains super-convergent nodal solutions of
; i.e.,
-degreed elements gain the nodal results of (
)-degreed elements.
For adaptive finite element (FE) analysis, unlike discrete methods, the FE method provides continuous solutions on the complete time domain and hence it is possible to employ an error estimator in the maximum norm, which is exclusively adopted in this paper. A more significant aspect of the FEM is its super-convergent nodal solutions, i.e., for the conventional element or for the condensed element, because the nodal solutions serve as the initial values for the next time-step (element) solution. However, as is well known, element accuracy is not the only criterion for overall performance. Based on numerous theoretical analyses and numerical experiments conducted by the authors, it has been identified that, for a reliable and robust adaptive FE analysis of the first-order IVPs with adaptive time-stepping (element sizing) controlled by the maximum norm, there are three crucial requirements for a high-performance algorithm to satisfy, described as follows.
Otherwise, the element can hardly be viewed to be fully reliable and robust.
This is to guarantee that the local (element) error estimate is reasonably reliable and the initial conditions for each new time-step (element) are of sufficiently high accuracy. Numerous numerical experiments have suggested that, especially for relatively long time domains, the ratio between the convergence orders at element end nodes and within elements is best up to two, i.e.,
In other words, for an element of degree with a convergence on the element, the nodal convergence order would best reach to .
With the requirement R2 satisfied, a super convergent solution with accuracy at least one order higher than the FE solution should be available to serve as an effective error estimator in the maximum norm.
Among the above three requirements, both the conventional and condensed elements satisfy R1, only the condensed element satisfies R2, and neither satisfies R3 unless an extra higher order super-convergent solution is available or constructed, which is a severe challenge to confront.
Based on the conventional element model, this paper proposes a novel approach, named the “reduced element” technique, which satisfies all the three requirements in a simple, direct, and straightforward way without the need for an additional separate computation to find an error estimator. Simply speaking, in this approach, suppose the adaptive analysis is aimed at an FE solution of -degreed elements with the pointwise errors required to satisfy the user preset tolerance ; we simply solve the problem by using elements of one order higher, i.e., degree , and then after the FE solution, we extract, on each element, the results up to degree as the target solution with the highest ordered (degree ) term used as a pointwise error estimator. Since the target solution is from the elements of reduced order (degree m) extracted from the elements of full order (degree ), it is simply called the “reduced element” technique.
6. Numerical Examples
In this section, representative numerical examples are given to test the proposed algorithm. To eliminate any accuracy loss due to insufficient numerical precision, the computation of
Section 6.1 and
Section 6.2 are performed by using the symbolic software Maple 12 with a precision of 32 decimal digits (roughly equivalent to quadruple precision in Fortran language on a 32-bit PC) to guarantee the results faithfully reflect the developed theory. To show pure numerical implementation,
Section 6.3 is computed by a Fortran 90 code with Gaussian quadrature and SOLVEBLOCK [
21] package employed. In the practical computation, various tolerances
ranging from
to
are adopted, and the linear (
) and cubic (
) reduced elements are employed for the presentation although other degreed elements have also been tested. For all the examples, the initial element size is taken as
.
6.1. An Illustrative Example
The first example is given to describe the detailed steps of the adaptive procedure, showing in particular how to form the FE matrix equation, how to estimate the maximum errors, and how to adjust the element size. The problem is the linearized Problem 3 in the next example, i.e.,
The objective is to solve for the solution on the first element
with the element size
being adaptively adjusted. The reduced linear element (
) is used as the final solution and, accordingly, the full element is a quadratic element, which can provide fourth-order nodal solutions (Equation (12)). From Equation (5), the trial and test functions are respectively as follows
Then the bilinear form in Equation (11) is
Note that by introducing the initial condition,
has been replaced by
. Then, from the arbitrariness of
and
, the matrix equation can be derived based on Equation (11) as
the solution of which is
Note that
is the FE solution at second end node of the element. It is easily seen that
which means the element is unconditionally stable. To see the local (truncated) error of the full FE solution, the series expansion of the true error gives
Note that the local error is of order 6, which is one order higher than it is estimated in Equation (12). This is because that the series expansion of the exact solution
lacks the term of order 5. With the full FE (conventional element) solution
obtained, the reduced solution
(Equation (13)), the estimated error term
(Equation (17)) and the estimated maximum error
(Equation (18)) are, respectively, as follows:
Now we are in a position to implement the adaptive FE analysis for the first element with the preset tolerance .
Taking the initial element size
and setting the initial value
, the following numerical results can be obtained from Equation (30)
The true error at the right end node is . It would be informative to calculate the same problem setting by using the fourth-order Runge–Kutta method, which yields the value at with the true error being 0.00236399, and turns out to be less accurate than the fourth-ordered solution of the quadratic element.
The true maximum error and the estimated error on the element are, respectively,
Since
, the formula in Equation (23) is used to generate a new element size
With this new
, updated nodal values are calculated
The subsequent computational steps are summarized in
Table 1, from which it can be seen that although the initial element size
is very large, it converges very fast, and after 4 adaptive steps, both the estimate error and the true error satisfy the required error tolerance
(Equation (22)). It can also be seen that the maximum error estimation of the reduced element is very accurate, and the nodal errors are much smaller than the element errors, to guarantee the provision of an initial value of higher order accuracy (with the error 0.652 × 10
−9) for the next time element.
6.2. Batch of 6 Numerical Examples
In this part, all the six problems originally solved in Ref. [
13] by using the Galerkin method with cubic (
) splines as basis functions and subsequently solved in Ref. [
20] by using the quadratic condensed element (
) on given uniform meshes will be resolved by the proposed adaptive FE algorithm using the reduced element.
The 6 problems, presented in Ref. [
13], are rearranged in sequence order in Ref. [
20], and this paper adopts the presentation in Ref. [
20] as follows.
Problem 1:
, Problem 4 in Ref. [
13]
Problem 2:
, Problem 5 in Ref. [
13]
Problem 3:
, Problem 1 in Ref. [
13]
Problem 4:
, Problem 2 in Ref. [
13]
Problem 5:
, Problem 3 in Ref. [
13]
Problem 6:
, Problem 6 in Ref. [
13]
Among the above problems, Problem 1 and 2 are examples of single linear ODEs with constant coefficients; Problems 3 to 5 are examples of single nonlinear ODEs; and Problem 6 is a system of nonlinear ODEs. The computed results are shown in
Table 2,
Table 3,
Table 4,
Table 5,
Table 6 and
Table 7 and
Figure 3,
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11,
Figure 12,
Figure 13 and
Figure 14. In the following, some brief remarks for each individual problem are given.
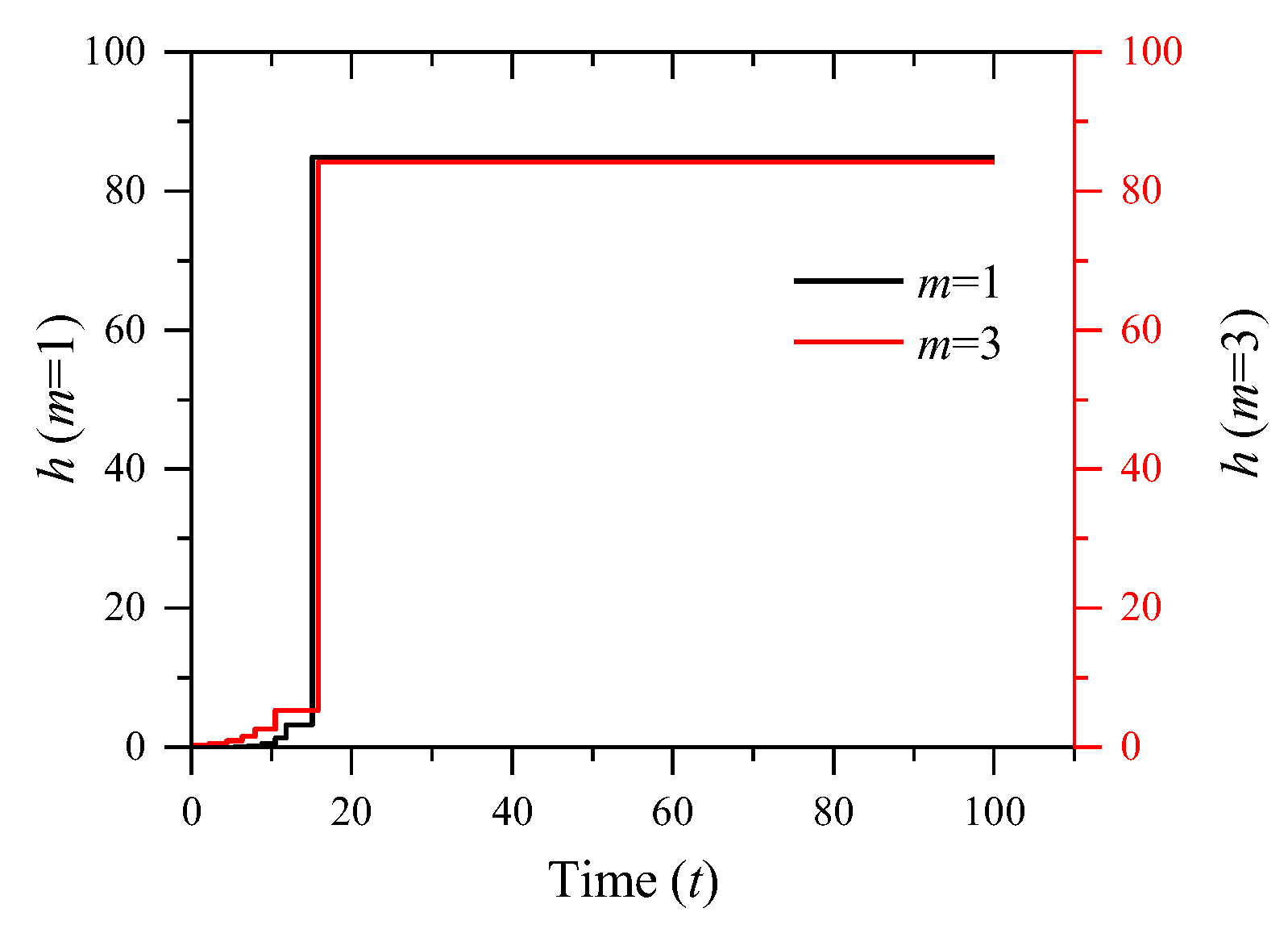
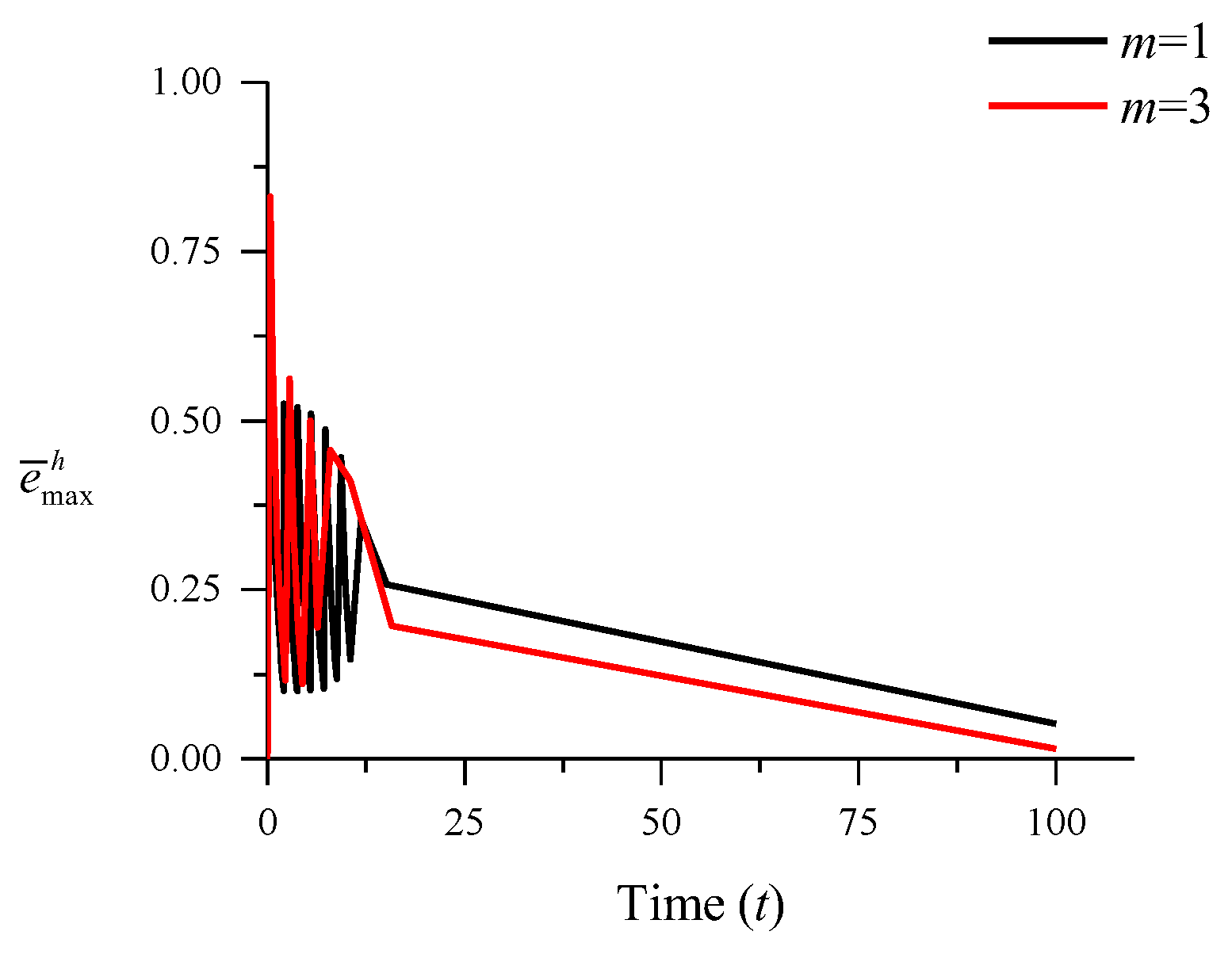
Problem 1 itself is an intrinsically unstable problem. The exact solution of Problem 1 is the exponential function, which soars up rapidly over time and reaches the magnitude of 22,026.47 at
. This presents a severe challenge to any algorithm with the stringent tolerance
in maximum norm, which means the algorithm should be able to gain at least 8 to 11 exact figures towards the terminal.
Table 2 shows the computed results for the problem, and
Figure 3 and
Figure 4 show the adapted step sizes and error distributions respectively, from which it is seen that proposed algorithm performs very well and all the FE solutions strictly meet the error tolerances.
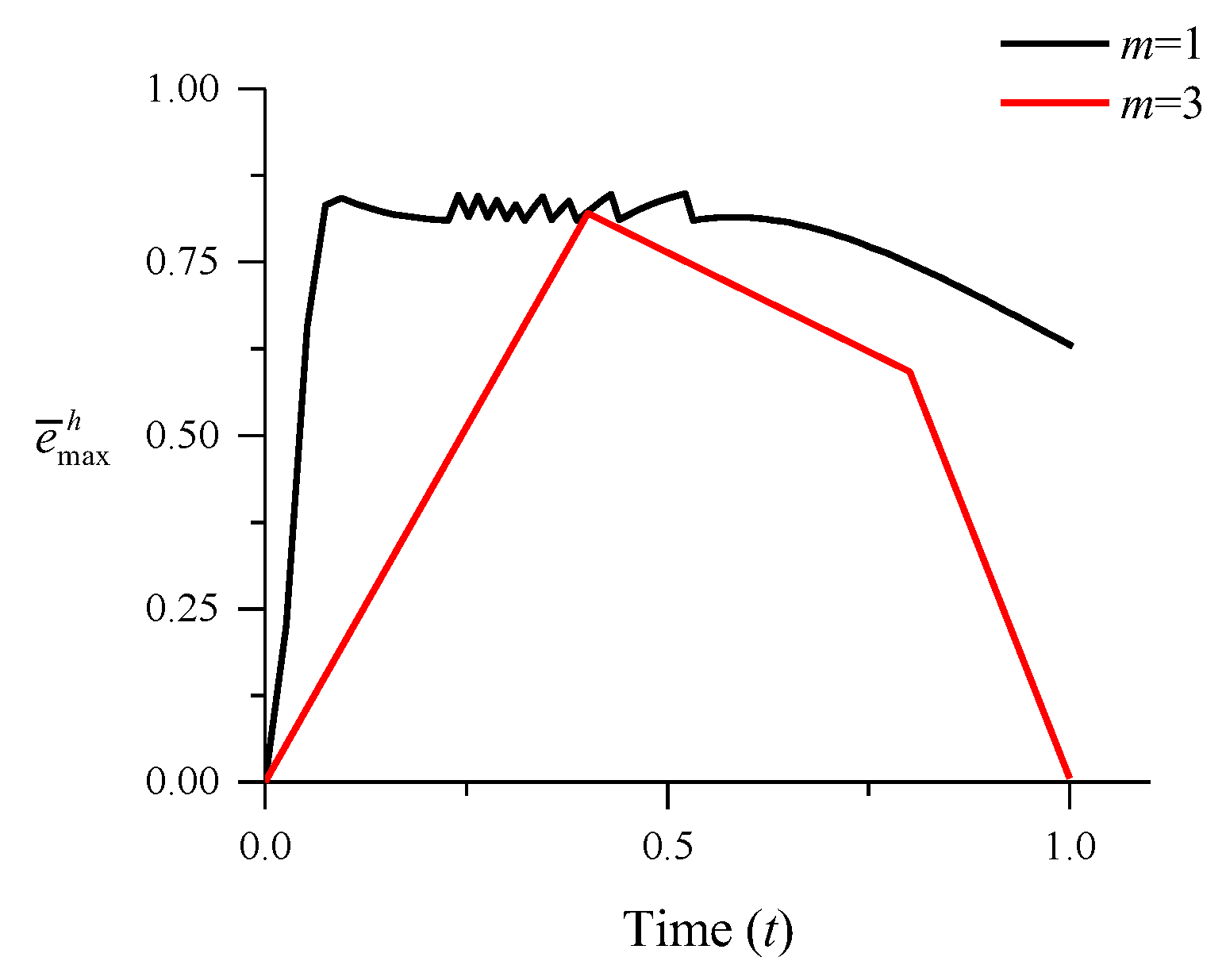
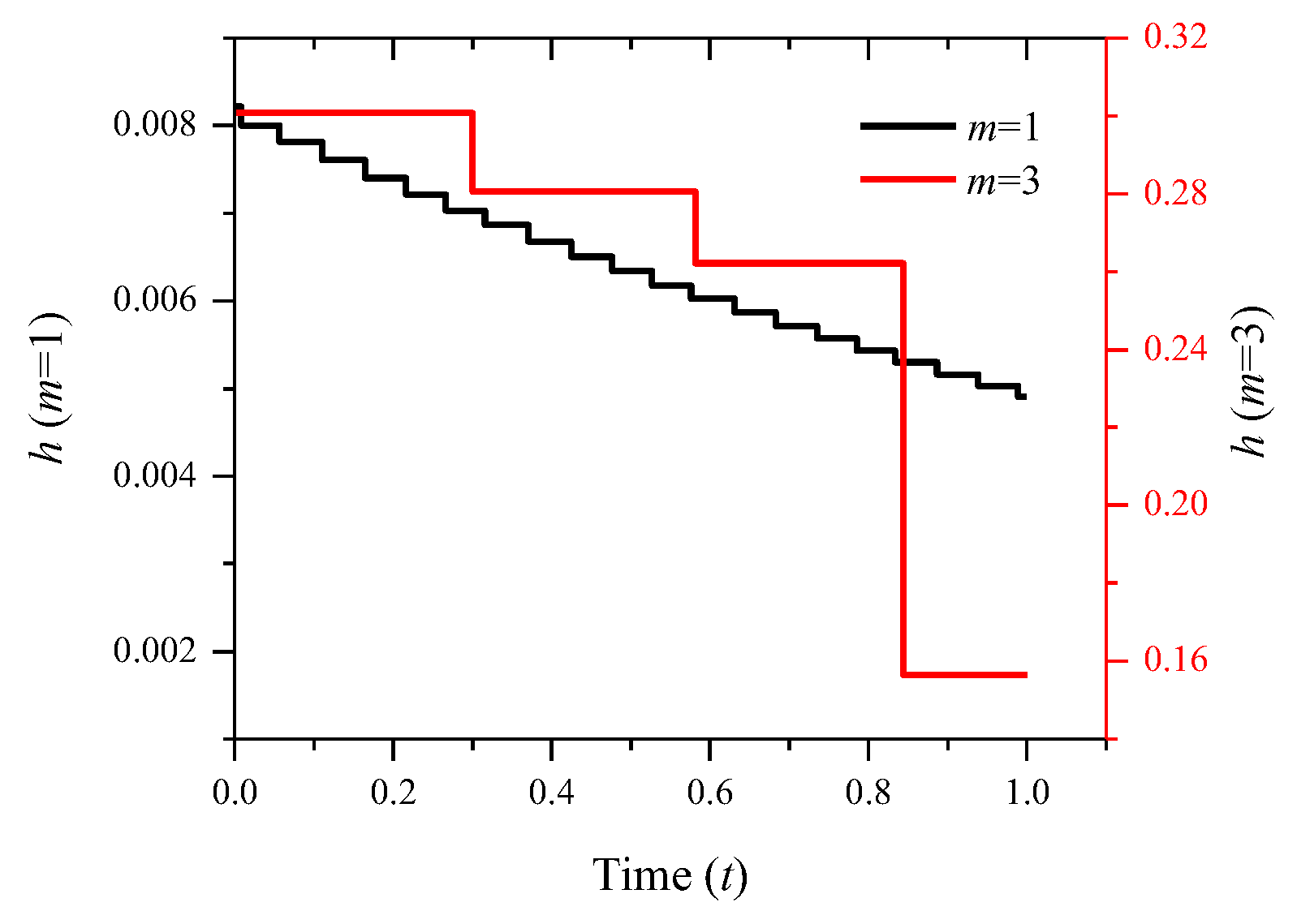
Problem 2 characterizes the opposite behavior to Problem 1, as its exact solution decays rapidly over time, resulting in a very large final step size as shown in
Figure 5. This reflects the adaptivity capability of the proposed algorithm.
Problems 3, 4, and 5 are nonlinear problems and are solved with no difficulties. Problem 6 is a system of nonlinear equations and, although the two solution components comprise a rapidly increased and a rapidly decayed functions, the proposed algorithm solves the problem without difficulties either.
For all the above problems, the proposed algorithm performs satisfactorily and all the computed FE solutions from the reduced elements are able to strictly satisfy the tolerances and hence have made full achievements of the adaptivity objective established in Equation (19).
6.3. A Dynamic Problem
The problem to be solved is a typical single degree-of-freedom problem [
22] posed in a second-order ODE form as follows:
which is typically an equation of motion and physically represents a damped harmonic motion subjected to a dynamic force. The exact solution is shown in
Figure 15. By introducing
and
, the problem can be equivalently transformed to a system of first-order ODEs:
which is solved by using the proposed algorithm with the reduced elements. Please note that, to test the stability of the algorithm for long time domains, a time domain of 256 s has been taken deliberately. The computed results are shown in
Table 8 and the adapted step sizes and error distributions are shown in
Figure 16 and
Figure 17, respectively. It is seen that all the FE solutions strictly satisfy the tolerances. It is also observed that the element size has changed at most five times and the number of adaptive iterations is no more than six times.
To access the performance of the reduced element compared with the standard (conventional) elements, the problem has also been solved by using the standard linear and quadratic Galerkin elements (see
Section 3) with the same adaptive step-size algorithm using the EEP (Element Energy Projection) [
16,
17,
18,
19] super-convergent solution as the error estimator. The computed results are shown in
Table 9 and the adapted step sizes and error distributions are shown in
Figure 18. It is seen that both standard elements fail to control the error to meet the given tolerance, and that the maximum error ratios are as high as 15.9 for the linear element and 5.63 for the quadratic element. The key reason is that neither of the accuracy ratios reaches two (one for the linear element and four thirds for the quadratic element), and hence neither of them can effectively provide satisfactory results.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}