
Pre-Launch Calibration of the Bidirectional Reflectance Distribution Function (BRDF) of Ultraviolet-Visible Hyperspectral Sensor Diffusers
 , ,
, ,
Abstract
:1. Introduction
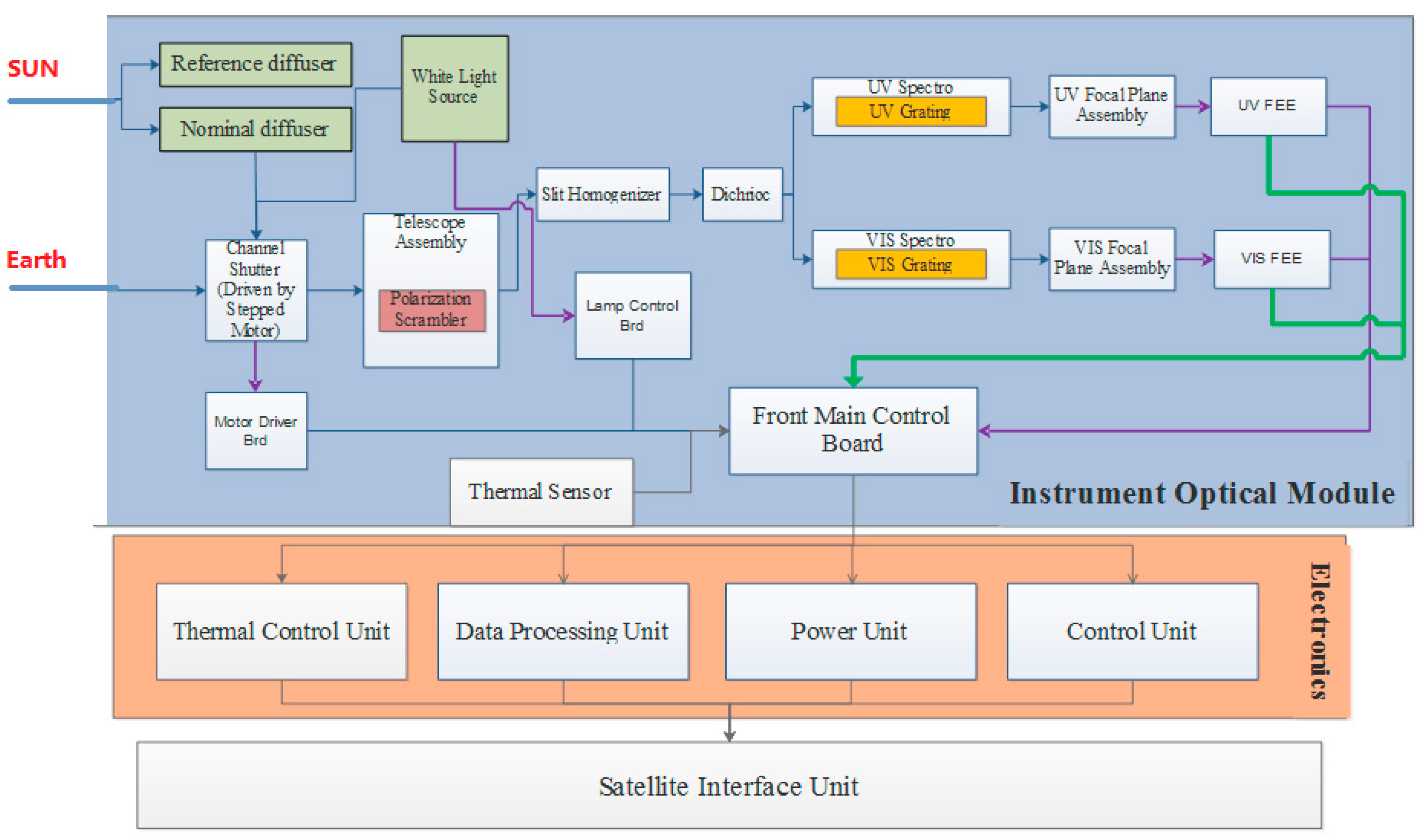
1.1. Overview
1.2. Description of BRDF
2. Experiment
2.1. Equipment for Calibration
- Solar simulator
- 2.
- Five-dimensional mobile station
- 3.
- Standard diffuser
2.2. Calibration Setup
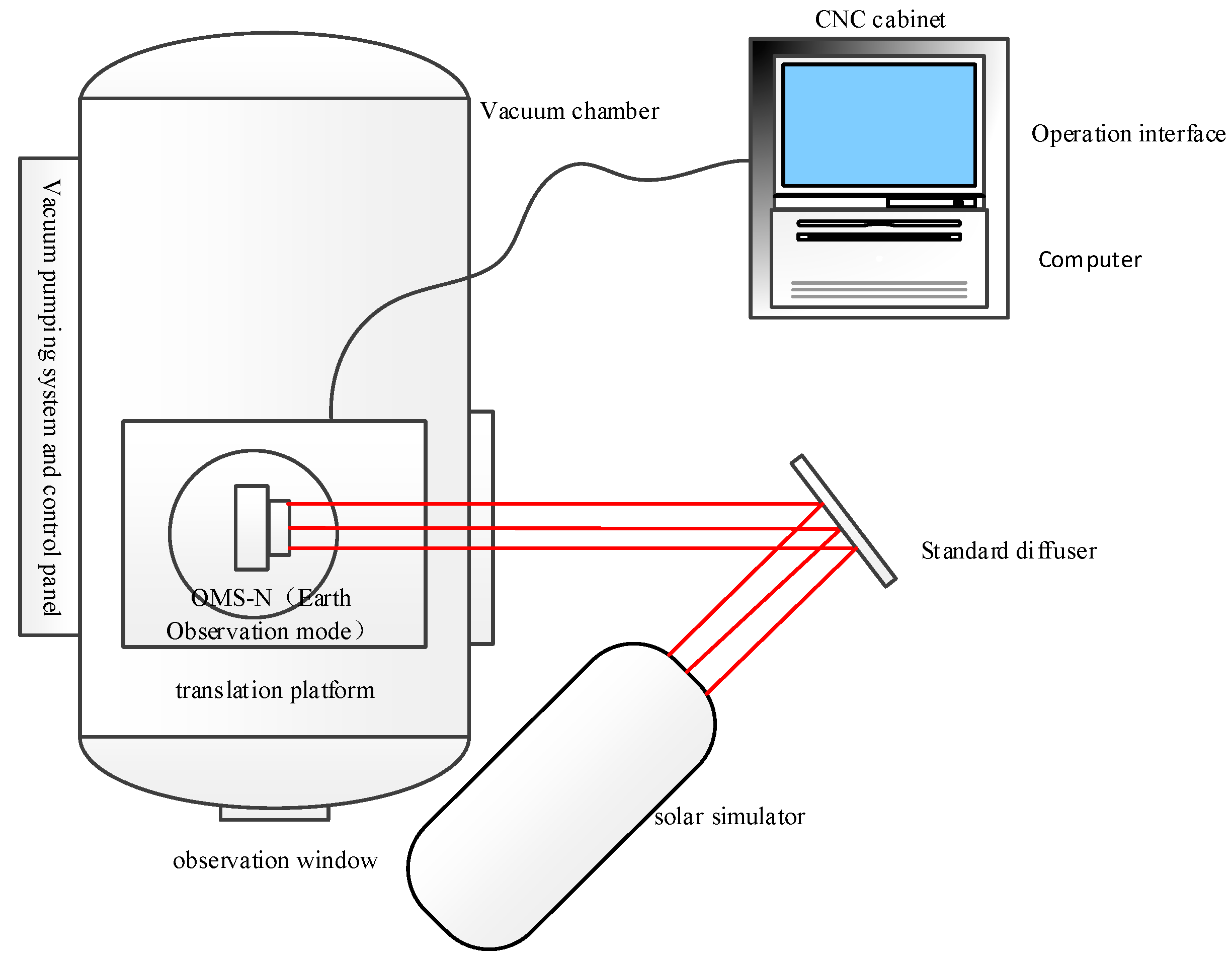
- The centers of these two surfaces must be perpendicular to their respective planes, with a consistent distance of approximately L, in accordance with the standard irradiance calibration.
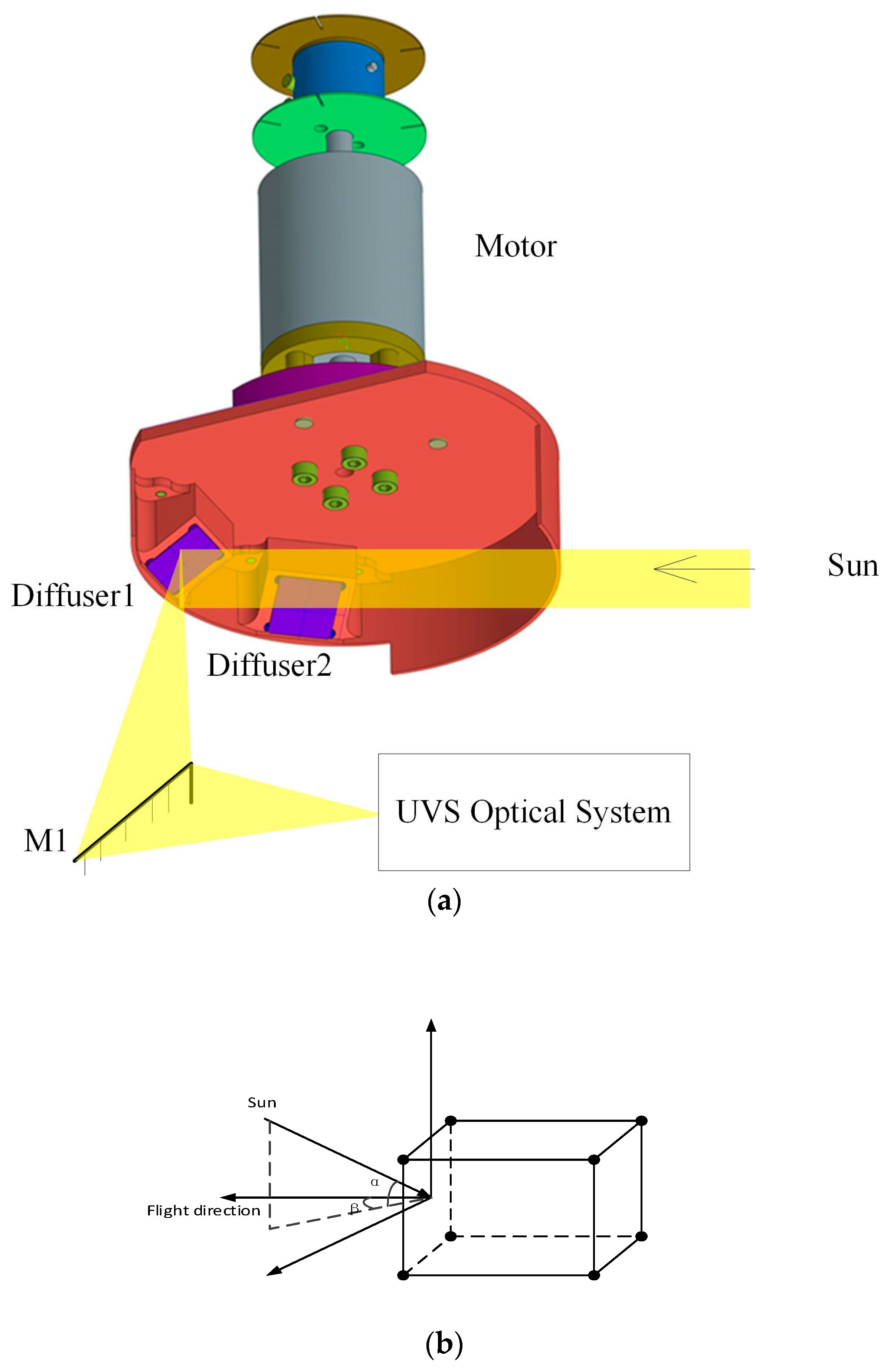
- This involves transitioning the UVS operational mode to “earth mode” to initiate observations of a designated point beneath the Earth’s surface. Adjustments are made to align the line connecting the center of the Earth port with the center of the diffuser to create a 30° angle with the normal of the diffuse reflector plate. Before commencing the calibration process, the light source is activated and allowed to stabilize for ten minutes.
- To capture comprehensive data, the rotation of the payload turntable begins, starting from the edge of the payload field of view (FOV) and progressing in 0.5° intervals until the instrument completes a full FOV scan. Ten observations are collected for each rotation position.
- Following this, the payload’s operational mode is transitioned to “solar mode”, and the onboard diffuse reflective plate is configured to “calibration 1” mode. The test apparatus is setup according to the provided diagram, ensuring that the front surface of the light source outlet aligns parallel to the sun port’s surface.Equal distances must be maintained between the optical stimulus and the onboard diffuser, both in the irradiance mode and the radiance mode, through careful adjustments.
- The angles are set to β = 26.45° and α = 0, and 50 data frames are acquired. α measurements start from −4°, adjusting in 1° increments up to +4°, with images captured at each α angle. Starting at 14.95°, β is measured in 1° increments up to 37.95°, and α is recorded at each β angle. Finally, the onboard diffuse reflector calibration board is transitioned to calibration 2 mode, and the test procedure is repeated to conclude the BRDF calibration for both onboard diffuse reflector boards.
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Butler, J.J.; Park, H.; Barnes, P.Y.; Early, E.A.; van Eijk-Olij, C.; Zoutman, A.R.; van Buller-Leeuwen, S.; Schaarsberg, J.G. Comparison of ultraviolet bidirectional reflectance distribution function (BRDF) measurements of diffusers used in the calibration of the Total Ozone Mapping Spectrometer (TOMS). In Proceedings of the International Symposium on Remote Sensing, Crete, Greece, 23–27 September 2002. [Google Scholar]
- Smorenburg, K.; van Valkenburg, A.L.G.; Werij, H.G.C. Absolute radiometric calibration facility. In Proceedings of the Satellite Remote Sensing II, Paris, France, 25–28 September 1995. [Google Scholar]
- Wohltmann, I.; Barry, B.; Klein, U.; Langer, J.; Lindner, K.; Kunzi, K.F.; von der Gathen, P. Comparison of ozone measuring instruments in Ny-lesund, Spitsbergen. In Proceedings of the Fifth European Symposium, Saint Jean de Luz, France, 27 September–1 October 1999. [Google Scholar]
- Lumpe, J.D.; Alfred, J.M.; Shettle, E.P.; Bevilacqua, R.M. Ten years of Southern Hemisphere polar mesospheric cloud observations from the Polar Ozone and Aerosol Measurement instruments. J. Geophys. Res. Atmos. 2008, 113, D04205. [Google Scholar] [CrossRef]
- de Vries, J.; van den Oord, G.H.J.; Hilsenrath, E.; te Plate, M.B.J.; Levelt, P.F.; Dirksen, R. Ozone monitoring instrument (OMI). In Proceedings of the SPIE Conference Imaging Spectrometry VII, San Diego, CA, USA, 29 July–3 August 2001. [Google Scholar]
- Hilker, T.; Coops, N.C.; Hall, F.G.; Black, T.A.; Wulder, M.A.; Nesic, Z.; Krishnan, P. Separating physiologically and directionally induced changes in PRI using BRDF models. Remote Sens. Environ. 2008, 112, 2777–2788. [Google Scholar] [CrossRef]
- Kleipool, Q.; Ludewig, A.; Babić, L.; Bartstra, R.; Braak, R.; Dierssen, W.; Dewitte, P.J.; Kenter, P.; Landzaat, R.; Leloux, J.; et al. Pre-launch calibration results of the TROPOMI payload on-board the Sentinel 5 Precursor satellite. Atmos. Meas. Tech. 2018, 11, 6439–6479. [Google Scholar] [CrossRef]
- Lawrence, J.; Rusinkiewicz, S.; Ramamoorthi, R. Efficient BRDF importance sampling using a factored representation. In Proceedings of the Special Interest Group on Computer Graphics and Interactive Techniques, Los Angeles, CA, USA, 8–12 August 2004. [Google Scholar]
- Schlick, C. An inexpensive BRDF model for physically-based rendering. Comput. Graph. Forum 1994, 13, 233–246. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Characteristics | ||
|---|---|---|---|
| Scientific objectives | O3, SO2, NO2, BrO, O3 profile, Aerosol, Cloud, etc. | ||
| Channel | UV1 | UV2 | UVIS |
| Spectral range/nm | 250–300 nm | 300–320 nm | 310–495 nm |
| Spectral resolution/nm | ~1 | 0.5 | ~0.6 |
| Field of view | 112° | ||
| Spatial resolution | 28 km × 21 km (at nadir) | 7 km × 7 km (at nadir) | 7 km × 7 km (at nadir) |
| SNR | >50 | >200 | >200@ UV >1000@ VIS |
| Wavelength calibration accuracy | 0.05 nm | 0.05 nm | 0.05 nm |
| BRDF calibration accuracy | 3% | ||
| UV1 | UV2 | VIS | |
|---|---|---|---|
| Source non-uniformity | 1.5% | 1. 5% | 1.5% |
| Standard diffuser plate uncertainty | 1% | 1% | 1% |
| UVS non-stationarity | 0.42% | 0.42% | 0.47% |
| Source non-stationarity | 1% | 1% | 1% |
| Solar simulator distance error | 0.5% | 0.5% | 0.5% |
| Total | 2.162% | 2.162% | 2.173% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, J.; Wang, Y.; Shi, E.; Wang, J.; Yao, S.; Zhu, J. Pre-Launch Calibration of the Bidirectional Reflectance Distribution Function (BRDF) of Ultraviolet-Visible Hyperspectral Sensor Diffusers. Appl. Sci. 2024, 14, 7278. https://doi.org/10.3390/app14167278
Mao J, Wang Y, Shi E, Wang J, Yao S, Zhu J. Pre-Launch Calibration of the Bidirectional Reflectance Distribution Function (BRDF) of Ultraviolet-Visible Hyperspectral Sensor Diffusers. Applied Sciences. 2024; 14(16):7278. https://doi.org/10.3390/app14167278
Chicago/Turabian StyleMao, Jinghua, Yongmei Wang, Entao Shi, Jinduo Wang, Shun Yao, and Jun Zhu. 2024. "Pre-Launch Calibration of the Bidirectional Reflectance Distribution Function (BRDF) of Ultraviolet-Visible Hyperspectral Sensor Diffusers" Applied Sciences 14, no. 16: 7278. https://doi.org/10.3390/app14167278