
Multi-Objective Optimization of Crashworthiness of Shrink Tube Energy Absorption Structure

Abstract
1. Introduction
2. Geometry and Finite Element Modeling
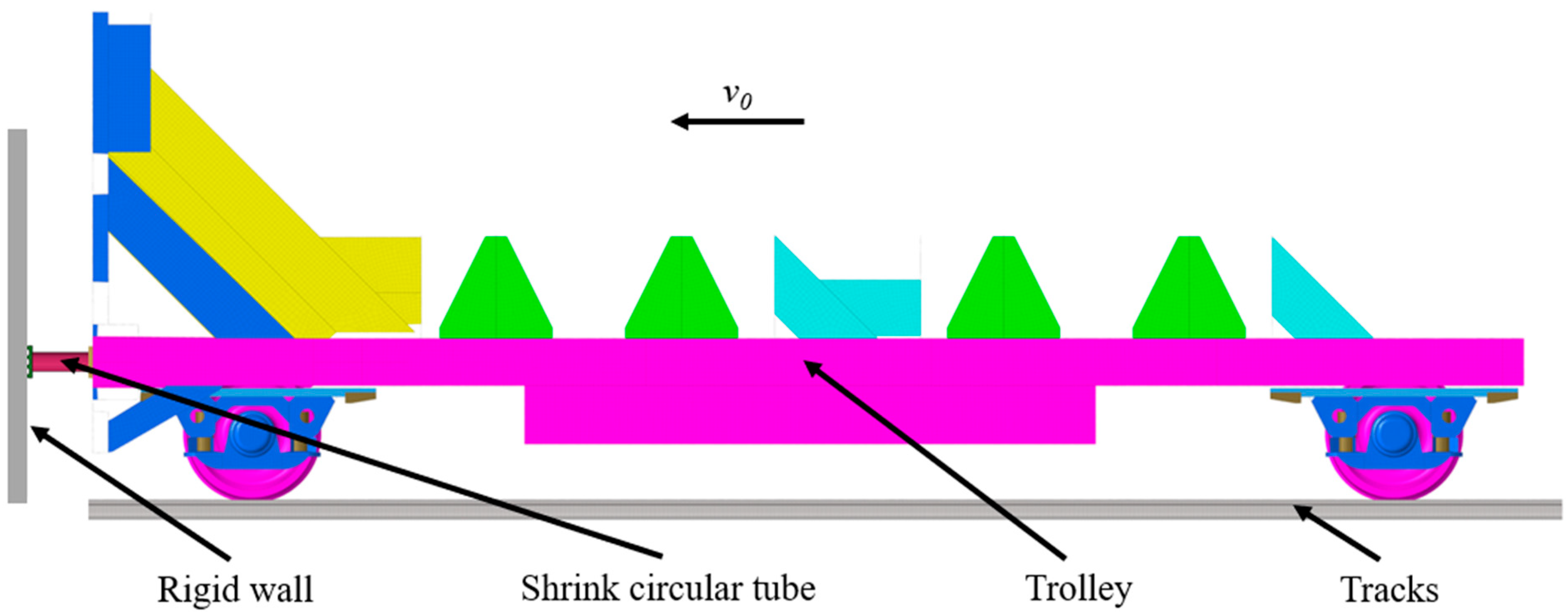
2.1. Shrink Tube Anti-Climb Structure
2.2. Finite Element Modeling
3. Test Verification and Crashworthiness Evaluation
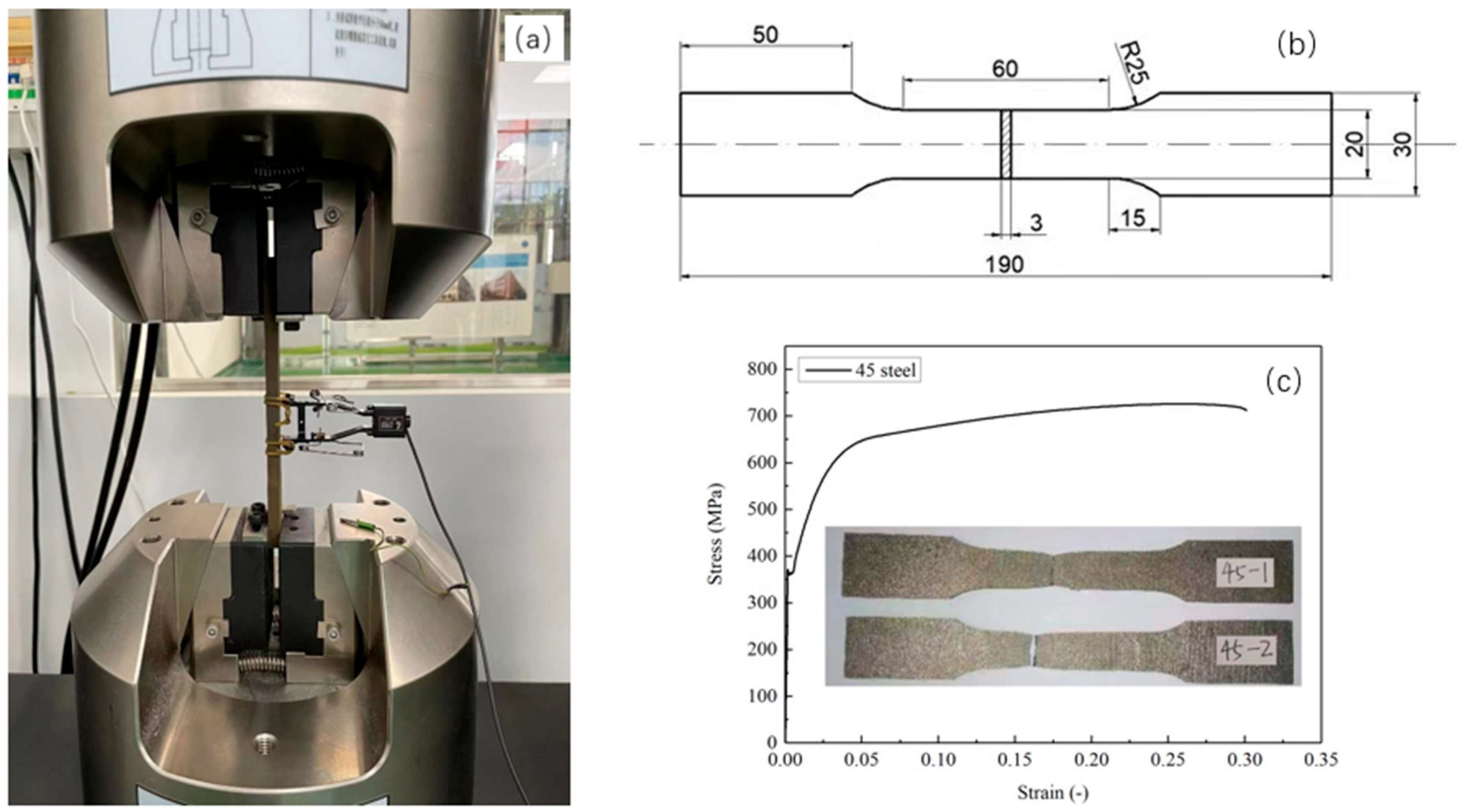
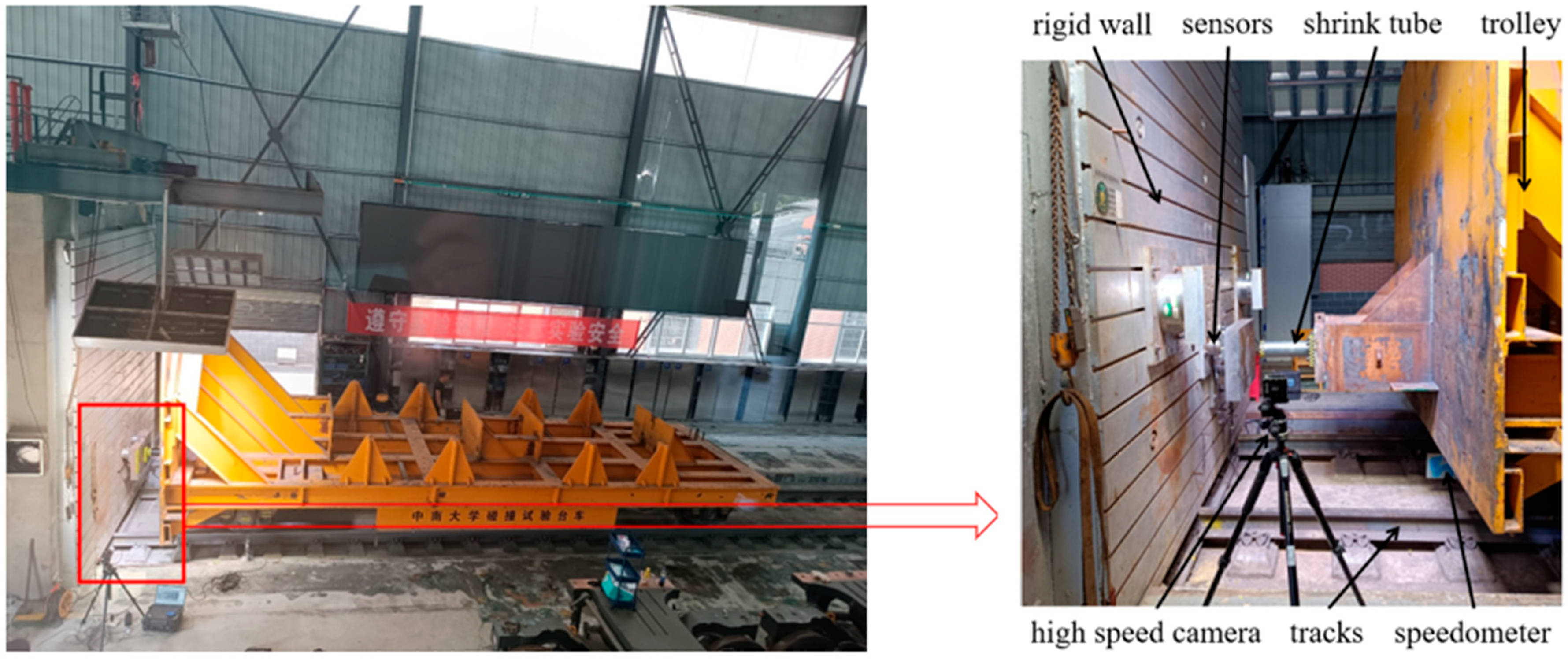
3.1. Test Verification
3.2. Evaluation Index
4. Main Causes and Response Surface Analysis
4.1. Design of Experiments
4.2. Analysis of the Main Causes
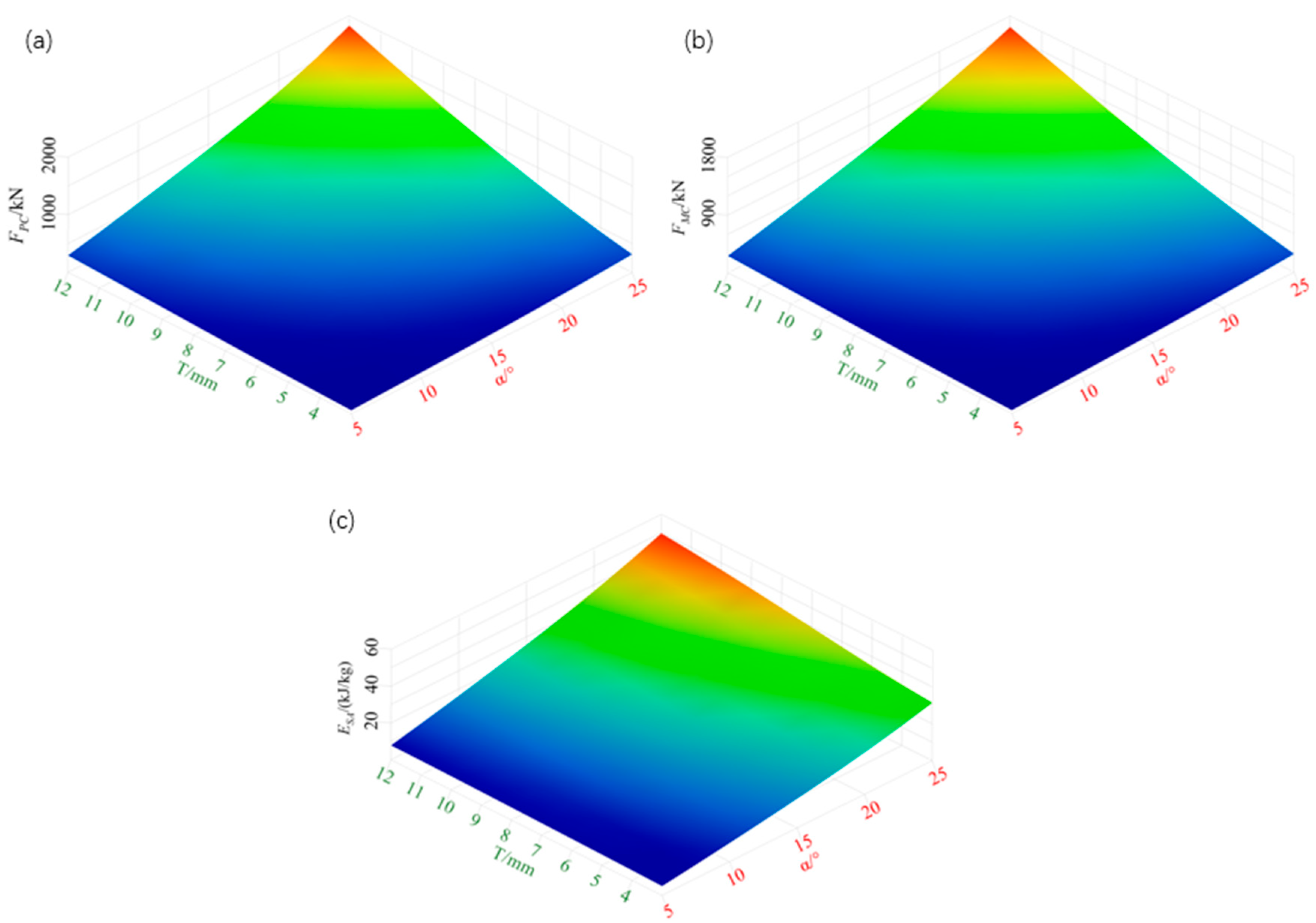
4.3. Response Surface Modelling and Agent Modelling
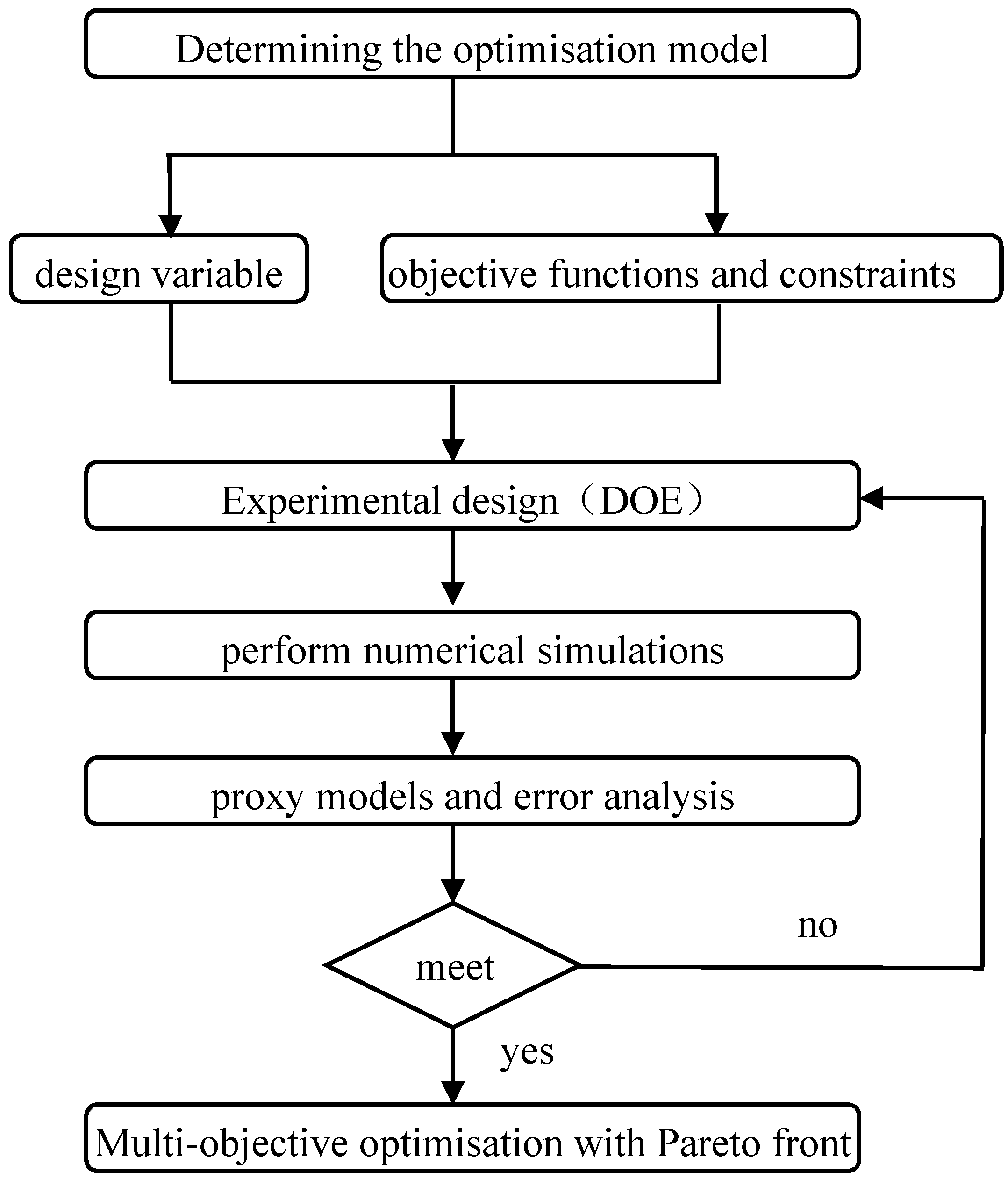
5. Multi-Objective Optimization
5.1. Optimal Algorithm
5.2. Optimization Objectives and Boundary Conditions
5.3. Optimization Results
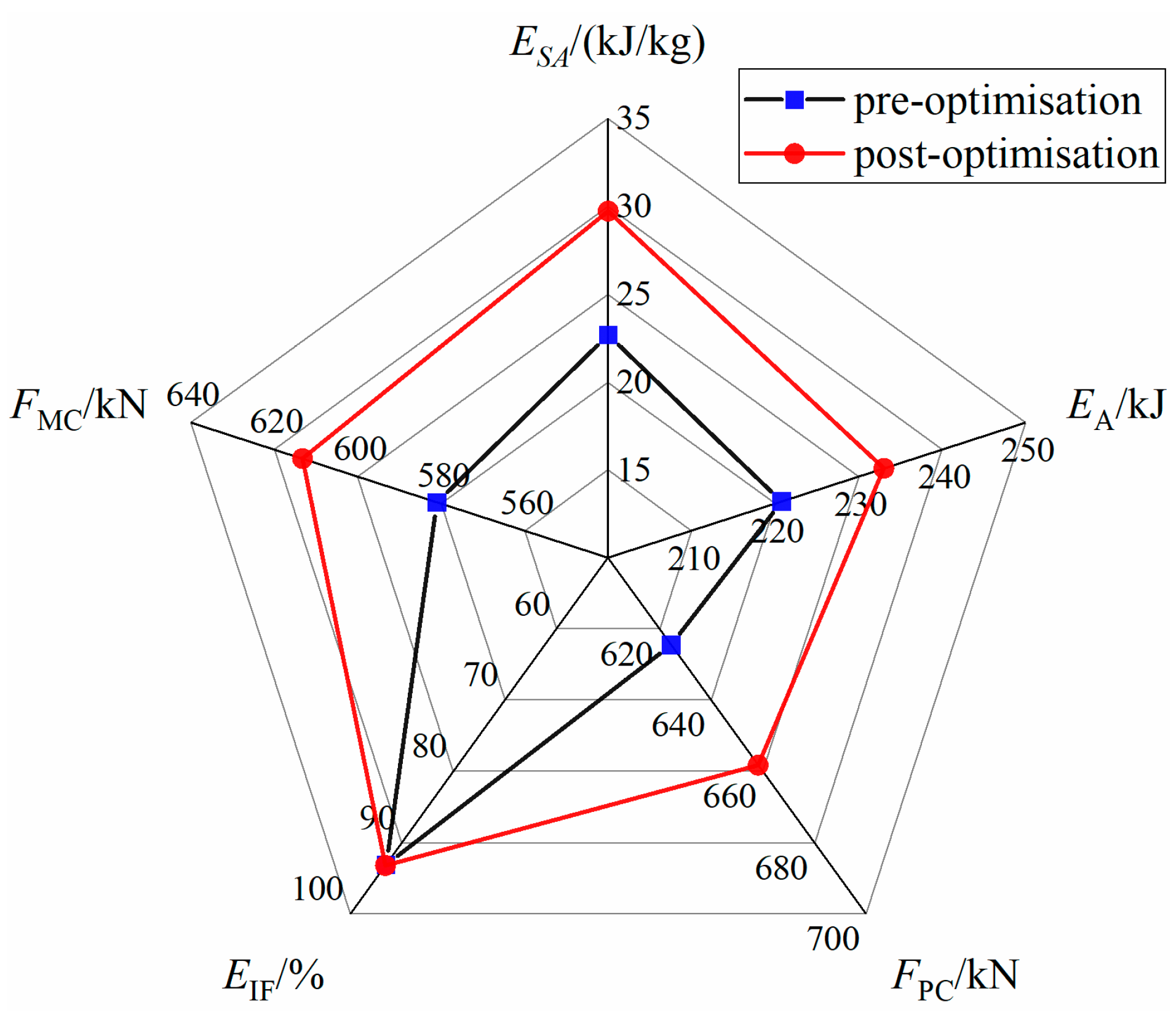
5.4. Comparison of Crashworthiness
6. Conclusions
- (1)
- The effects of the cone angle, shrink tube thickness, friction coefficient and friction cone axial length on the crashworthiness of the shrink tube were studied, and the main causes were analyzed. It was found that the cone angle and thickness had the greatest impact on crashworthiness. Within the variable design interval, the mean force increased by 476.42% and 515.72% with the thickness and angle, respectively, and the specific energy absorption increased by 58.59% and 531.19% with the thickness and angle, respectively.
- (2)
- The global response surface method was used to perform multi-objective optimization on the structural parameters of the shrink tube. Among the optimal structural parameters obtained, the cone angle was 20.2°, the tube wall thickness was 7.1 mm, the friction coefficient was 0.1 and the friction cone axial direction length was 25 mm. After optimization, the specific absorption energy was 29.73 kJ (kg)−1, which was 31.03% higher than before optimization.
- (3)
- The mean force obtained through surrogate model optimization was 613.23 kN. The mean force obtained by simulating the optimal structural parameters was 605.32 kN. The mean force error was 1.31%, which shows that the surrogate model has high accuracy.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, Z.; Zhai, W.; Cai, C.; Sun, Y. Safety threshold of high-speed railway pier settlement based on train-track-bridge dynamic interaction. Sci. China-Technol. Sci. 2015, 58, 202–210. [Google Scholar] [CrossRef]
- Wang, T.; Wang, L.; Wang, C.; Zou, X. Crashworthiness analysis and multi-objective optimization of a commercial vehicle frame: A mixed meta-modeling-based method. Adv. Mech. Eng. 2018, 10, 1687814018778480. [Google Scholar] [CrossRef]
- Fang, J.; Gao, Y.; Sun, G.; Zhang, Y.; Li, Q. Crashworthiness design of foam-filled bitubal structures with uncertainty. Int. J. Non-Linear Mech. 2014, 67, 120–132. [Google Scholar] [CrossRef]
- Xiao, Z.; Fang, J.; Sun, G.; Li, Q. Crashworthiness design for functionally graded foam-filled bumper beam. Adv. Eng. Softw. 2015, 85, 81–95. [Google Scholar] [CrossRef]
- He, Q.; Ma, D.; Zhang, Z.; Yao, L. Mean compressive stress constitutive equation and crashworthiness optimization design of three novel honeycombs under axial compression. Int. J. Mech. Sci. 2015, 99, 274–287. [Google Scholar] [CrossRef]
- Ko, Y.; Ahn, K.; Huh, H.; Choi, W.; Jung, H.; Kwon, T. Evaluation of Crash Energy Absorption Capacity of a Tearing Tube. Exp. Appl. Mech. 2011, 6, 647–654. [Google Scholar]
- Liu, Y.; Qiu, X. A theoretical study of the expansion metal tubes. Int. J. Mech. Sci. 2016, 114, 157–165. [Google Scholar] [CrossRef]
- Liu, Y.; Qiu, X.; Wang, W.; Yu, T.X. An improved two-arcs deformational theoretical model of the expansion tubes. Int. J. Mech. Sci. 2017, 133, 240–250. [Google Scholar] [CrossRef]
- Yang, J.; Luo, M.; Hua, Y.; Lu, G. Energy absorption of expansion tubes using a conical–cylindrical die: Experiments and numerical simulation. Int. J. Mech. Sci. 2010, 52, 716–725. [Google Scholar] [CrossRef]
- Yan, J.; Yao, S.; Xu, P.; Peng, Y.; Shao, H.; Zhao, S. Theoretical prediction and numerical studies of expanding circular tubes as energy absorbers. Int. J. Mech. Sci. 2016, 105, 206–214. [Google Scholar] [CrossRef]
- Yao, S.; Yan, K.; Lu, S.; Xu, P. Prediction and application of energy absorption characteristics of thin-walled circular tubes based on dimensional analysis. Thin-Walled Struct. 2018, 130, 505–519. [Google Scholar] [CrossRef]
- Hu, Y.; Liu, C.; Zhang, J.; Ding, G.; Wu, Q. Research on carbon fiber-reinforced plastic bumper beam subjected to low-velocity frontal impact. Adv. Mech. Eng. 2015, 7, 1687814015589458. [Google Scholar] [CrossRef]
- Tang, Z.; Liu, F.J.; Guo, S.H.; Chang, J.; Zhang, J.J. Evaluation of coupled finite element/meshfree method for a robust full-scale crashworthiness simulation of railway vehicles. Adv. Mech. Eng. 2016, 8, 1687814016642954. [Google Scholar] [CrossRef]
- Daxner, T.; Rammerstorfer, F.G.; Fischer, F.D. Instability phenomena during the conical expansion of circular cylindrical shells. Comput. Methods Appl. Mech. Eng. 2005, 194, 2591–2603. [Google Scholar] [CrossRef]
- Fischer, F.D.; Rammerstorfer, F.G.; Daxner, T. Flaring—An analytical approach. Int. J. Mech. Sci. 2006, 48, 1246–1255. [Google Scholar] [CrossRef]
- Shakeri, M.; Salehghaffari, S.; Mirzaeifar, R. Expansion of circular tubes by rigid tubes as impact energy absorbers: Experimental and theoretical investigation. Int. J. Crashworthiness 2007, 12, 493–501. [Google Scholar] [CrossRef]
- Seibi, A.C.; Al-Hiddabi, S.; Pervez, T. Structural Behavior of a Solid Tubular Under Large Radial Plastic Expansion. J. Energy Resour. Technol. 2005, 127, 323–327. [Google Scholar] [CrossRef]
- Seibi, A.C.; Barsoum, I.; Molki, A. Experimental and Numerical Study of Expanded Aluminum and Steel Tubes. Procedia Eng. 2011, 10, 3049–3055. [Google Scholar] [CrossRef]
- Karrech, A.; Seibi, A. Analytical model for the expansion of tubes under tension. J. Mater. Process. Technol. 2010, 210, 356–362. [Google Scholar] [CrossRef]
- Liu, Y.; Qiu, X.; Yu, T.X. A theoretical model of the inversion tube over a conical die. Thin-Walled Struct. 2018, 127, 31–39. [Google Scholar] [CrossRef]
- Niknejad, A.; Moeinifard, M. Theoretical and experimental studies of the external inversion process in the circular metal tubes. Mater. Des. 2012, 40, 324–330. [Google Scholar] [CrossRef]
- Rosa, P.; Baptista, R.; Rodrigues, J.; Martins, P. An investigation on the external inversion of thin-walled tubes using a die. Int. J. Plast. 2004, 20, 1931–1946. [Google Scholar] [CrossRef]
- Rosa, P.A.R.; Rodrigues, J.M.C.; Martins, P.A.F. External inversion of thin-walled tubes using a die: Experimental and theoretical investigation. Int. J. Mach. Tools Manuf. 2003, 43, 787–796. [Google Scholar] [CrossRef]
- Yu, X.; Qiu, X.; Yu, T.X. Analysis of the free external inversion of circular tubes based on deformation theory. Int. J. Mech. Sci. 2015, 100, 262–268. [Google Scholar] [CrossRef]
- Yu, X.; Qiu, X.; Yu, T.X. Theoretical model of a metal tube under inversion over circular dies. Int. J. Mech. Sci. 2016, 108–109, 23–28. [Google Scholar] [CrossRef]
- Huang, X.; Lu, G.; Yu, T.X. On the axial splitting and curling of circular metal tubes. Int. J. Mech. Sci. 2002, 44, 2369–2391. [Google Scholar] [CrossRef]
- Moreno, C.; Beaumont, R.; Hughes, D.J.; Williams, T.; Dashwood, R. Quasi-static and dynamic testing of splitting, expansion and expansion-splitting hybrid tubes under oblique loading. Int. J. Impact Eng. 2017, 100, 117–130. [Google Scholar] [CrossRef]
- Moreno, C.; Williams, T.; Beaumont, R.; Hughes, D.J.; Dashwood, R. Testing, simulation and evaluation of a novel hybrid energy absorber. Int. J. Impact Eng. 2016, 93, 11–27. [Google Scholar] [CrossRef]
- Niknejad, A.; Rezaei, B.; Liaghat, G.H. Empty circular metal tubes in the splitting process—Theoretical and experimental studies. Thin-Walled Struct. 2013, 72, 48–60. [Google Scholar] [CrossRef]
- Rouzegar, J.; Karimi, M. Numerical and experimental study of axial splitting of circular tubular structures. Thin-Walled Struct. 2016, 105, 57–70. [Google Scholar] [CrossRef]
- Li, J.; Gao, G.; Guan, W.; Wang, S.; Yu, Y. Experimental and numerical investigations on the energy absorption of shrink circular tube under quasi-static loading. Int. J. Mech. Sci. 2018, 137, 284–294. [Google Scholar] [CrossRef]
- Yao, S.; Li, Z.; Ma, W.; Xu, P. Crashworthiness analysis of a straight-tapered shrink tube. Int. J. Mech. Sci. 2019, 157–158, 512–527. [Google Scholar] [CrossRef]
- Liu, Y.; Qiu, X. A theoretical model of the shrinking metal tubes. Int. J. Mech. Sci. 2018, 144, 564–575. [Google Scholar] [CrossRef]
- Almeida, B.P.P.; Alves, M.L.; Rosa, P.A.R.; Brito, A.G.; Martins, P.A.F. Expansion and reduction of thin-walled tubes using a die: Experimental and theoretical investigation. Int. J. Mach. Tools Manuf. 2006, 46, 1643–1652. [Google Scholar] [CrossRef]
- Alves, M.L.; Almeida, B.P.P.; Rosa, P.A.R.; Martins, P.A.F. End forming of thin-walled tubes. J. Mater. Process. Technol. 2006, 177, 183–187. [Google Scholar] [CrossRef]
- Guan, W.; Gao, G.; Yu, Y. Crushing analysis and multiobjective crashworthiness optimization of combined shrinking circular tubes under impact loading. Struct. Multidiscip. Optim. 2021, 64, 1649. [Google Scholar] [CrossRef]
- Tanaskovic, J.; Milkovic, D.; Lucanin, V.; Vasic Franklin, G. Experimental investigations of the shrinking–splitting tube collision energy absorber. Thin-Walled Struct. 2015, 86, 142–147. [Google Scholar] [CrossRef]
- ISO 6892-1:2009; Metallic Materials—Tensile Testing. Part 1: Method of Test at Room Temperature. ISO: Geneva, Switzerland, 2009.
- Fang, J.; Sun, G.; Qiu, N.; Kim, N.H.; Li, Q. On design optimization for structural crashworthiness and its state of the art. Struct. Multidiscip. Optim. 2017, 55, 1091–1119. [Google Scholar] [CrossRef]
- Guan, W.; Gao, G. Crashworthiness analysis of shrink circular tube energy absorbers with anti-climbers under multiple loading cases. Mech. Adv. Mater. Struct. 2022, 30, 1453–1469. [Google Scholar] [CrossRef]
- Gao, G.; Guan, W.; Li, J.; Dong, H.; Zou, X.; Chen, W. Experimental investigation of an active-passive integration energy absorber for railway vehicles. Thin-Walled Struct. 2017, 117, 89–97. [Google Scholar] [CrossRef]
- Xie, S.; Zhou, H. Analysis and optimisation of parameters influencing the out-of-plane energy absorption of an aluminium honeycomb. Thin-Walled Struct. 2015, 89, 169–177. [Google Scholar] [CrossRef]
- Aye, C.M.; Pholdee, N.; Yildiz, A.R.; Bureerat, S.; Sait, S.M. Multi-surrogate-assisted metaheuristics for crashworthiness optimisation. Int. J. Veh. Des. 2019, 80, 223–240. [Google Scholar] [CrossRef]
- Peta, K.; Żurek, J. Prediction of Air Leakage in Heat Exchangers for Automotive Applications Using Artificial Neural Networks; Faculty of Mechanical Engineering and Management, Poznan University of Technology: Poznan, Poland, 2018. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh Size/mm | Mean Force/kN | Relative Error (%) |
|---|---|---|
| 5 × 5 × 5 | 700 | 22.16 |
| 4 × 4 × 4 | 587 | 2.44 |
| 3 × 3 × 3 | 573 | - |
| Variable Names | Cone Angle α/° | Thicknesses T/mm | Friction Coefficient u | Axial Length S/mm |
|---|---|---|---|---|
| Variable values | 5, 15, 25 | 3, 6, 9, 12 | 0.02, 0.04, 0.06, 0.08, 0.1 | 21, 23, 25, 27, 29 |
| Variant | R2 | Eraa | Erms |
|---|---|---|---|
| FPC | 0.999 | 0.007 | 7.789 |
| FMC | 0.991 | 0.052 | 18.986 |
| ESA | 0.999 | 0.008 | 0.133 |
| Indicator | FPC/kN | ESA/(kJ/kg) | FMC/kN |
|---|---|---|---|
| optimal value | 658.16 | 29.73 | 613.23 |
| simulation value | 648.71 | 29.34 | 605.32 |
| errors | 1.46% | 1.33% | 1.31% |
| Indicator | ESA/(kJ/kg) | EA/kJ | FPC/kN | EIF/% | FMC/kN |
|---|---|---|---|---|---|
| original value | 22.69 | 220.78 | 624.41 | 93.05 | 581.01 |
| optimal value | 29.73 | 233.03 | 658.16 | 93.17 | 613.23 |
| elevation | 31.03% | 5.5% | 5.41% | 0.13% | 5.55% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, F.; Yao, S. Multi-Objective Optimization of Crashworthiness of Shrink Tube Energy Absorption Structure. Appl. Sci. 2024, 14, 7347. https://doi.org/10.3390/app14167347
Zou F, Yao S. Multi-Objective Optimization of Crashworthiness of Shrink Tube Energy Absorption Structure. Applied Sciences. 2024; 14(16):7347. https://doi.org/10.3390/app14167347
Chicago/Turabian StyleZou, Fan, and Shuguang Yao. 2024. "Multi-Objective Optimization of Crashworthiness of Shrink Tube Energy Absorption Structure" Applied Sciences 14, no. 16: 7347. https://doi.org/10.3390/app14167347
APA StyleZou, F., & Yao, S. (2024). Multi-Objective Optimization of Crashworthiness of Shrink Tube Energy Absorption Structure. Applied Sciences, 14(16), 7347. https://doi.org/10.3390/app14167347