Featured Application
The gained knowledge can be applied by road marking material manufacturers and automotive proving ground operators to provide road marking scenarios on test tracks to test perception systems that work with camera or LiDAR sensors. The investigated method is especially useful for urban scenarios with road markings that have complex geometric shapes, such as small radii, symbols, lettering, and specific corner shapes for parking slots.
Abstract
In order to test camera- and LiDAR-based perception of road markings for automated driving, vehicle developers have started to utilize concepts for the agile alteration of road marking patterns on proving grounds. Road marking materials commonly used within this concept are different types of tape that can easily be applied and removed on asphalt and concrete. Due to the elasticity of tape, it cannot be used efficiently for small radii, symbols, lettering, and specific corner shapes (e.g., for parking slots). These road marking patterns are common in urban environments. With the growing capability of automated driving systems and more applications for urban environments, edgy road marking shapes gain importance for proving ground testing. This study examines the use of water-soluble road marking paint specifically designed for the use case of temporary applications on proving grounds for camera- and LiDAR-based perception testing. We found that white, water-soluble paint with 1.5% binder content and 2.25% coalescing agent content can provide realistic road markings for vehicle testing purposes. However, solubility affects the paint’s vulnerability to fading during rain. Hence, renewal activities over the course of longer test drives might be necessary. The paint could be removed using water pressure without significant residue or damaging of the asphalt.
Keywords:
active perception; autonomous driving; image processing; paints; road marking; road safety; sensors; testing 1. Introduction
Automated driving systems for highway use cases are increasingly being implemented in road traffic, e.g., in [1,2]. Compared to country roads, urban areas or rural environments, highway traffic is less complex and yet still provides a high traffic throughput. Within the automotive industry, a challenge for the coming years will be to extend the operational design domain (ODD)—meaning the environmental conditions in which an automated vehicle can safely operate. For automated vehicles relying on onboard sensors to navigate safely through different types of road traffic, their capabilities of detecting and correctly interpreting road markings need to grow. Whereas highways in many parts of the world only possess wide longitudinal markings on straights and in curves that have a big radius, road markings in urban areas are far more complex [3]. Transverse lines are common, longitudinal lines might be narrower, arrows can indicate turning lanes, text and symbols might stipulate certain rules, and rectangular boxes indicate parking slots. The variety and geometric complexity are vast, making it difficult to introduce automated vehicles for door-to-door transportation in cities.
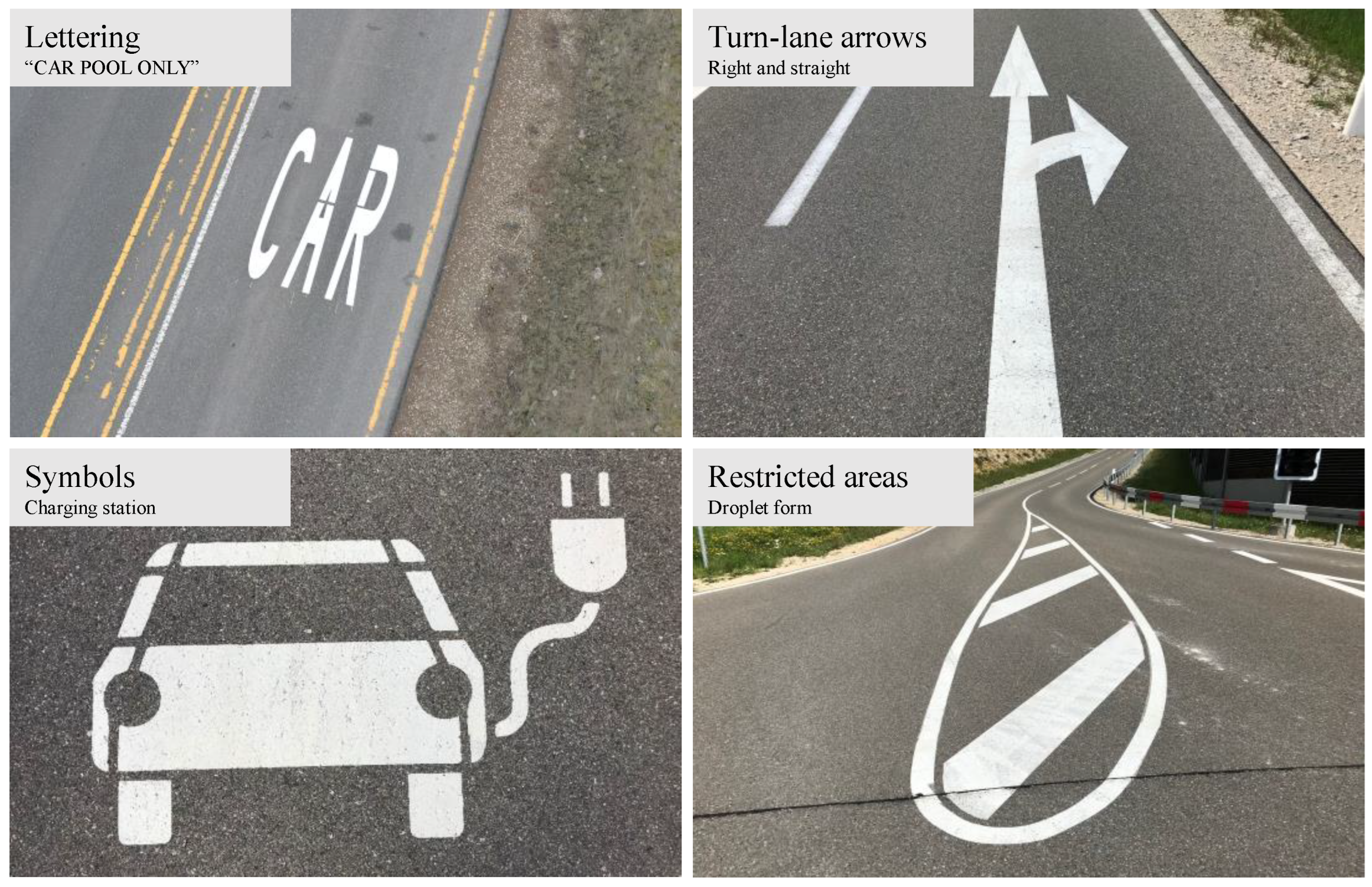
To validate and verify the functionality of automated driving systems, vehicle developers utilize proving grounds. A common approach is scenario-based testing, where representative traffic scenarios are created on test tracks [4]. Proving grounds provide isolated, controllable, private test tracks to perform driving maneuvers in a reproducible manner. Since proving grounds only have confined space, some of their operators offer temporary road markings to increase the number of tests that can be conducted on site and to react quickly to customers’ demands. According to the IAMTS testbed database [5], at least 14 proving grounds offer a temporary road marking service. Analogous to road markings for road works on highways, this service often utilizes road marking tape. Since the tape is prefabricated, it has a homogenous geometric shape and clear edges and is therefore suitable in terms of reproducibility. Furthermore, it can easily be pressed on the road, allowing comparably low application and removal efforts. The concept described in [6] recommends tape that is homologated for use in road works in public traffic and provides a visibility above the minimum requirements for public road traffic [7,8,9,10]. In general, road marking tape is also available for permanent road markings with higher adhesion attributes; however, easy removability is desired for the use case of agile scenario alteration on proving grounds. The advantage of low application effort, which temporary road marking tape has, does not persist for the complex geometric shapes that are often found in urban environments, such as text and symbols. By cutting the tape into fragments of the shape that is required, tape can theoretically be used; however, this process involves significant manual labor compared to using paint and a stencil. In addition, consistent line segments with radii of only a few meters cannot be marked effectively with tape due to its lack of plasticity. A potential solution for the temporary application of complex geometric shapes on proving grounds is removable road marking paint. Figure 1 provides some example use cases.
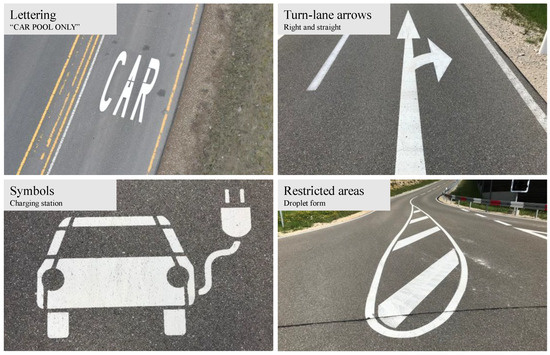
Figure 1.
Example use cases for temporary road marking paints on proving grounds are shapes with round edges.
To provide geometrically complex, temporary road markings for perception tests, a specific paint was developed in a collaborative project between Mercedes-Benz and SWARCO. The paint was required to maintain good, constant visibility over the course of a test drive, which usually has a duration of up to four weeks. Ideally, the road marking paint should not be affected by precipitation. Regardless, it should be easily removable without residuals or other traces. Lastly, the paint should be cost-effective and environmentally compatible. Multiple samples with different material properties were manufactured and tested at the Mercedes-Benz Technology Center (MTC) in Immendingen, Germany. Measurements were performed using cameras and a retroreflectometer.
This study builds upon the author’s previous research that investigated materials for temporary road marking tape for use on automotive proving grounds [6], as well as a method for high-accuracy pre-marking [11].
By expanding the knowledge and portfolio of methods to alter scenarios in an agile manner on proving grounds, the work presented in this article contributes to the development of automated driving systems in multiple ways:
- The acceleration of vehicle testing allows for shorter development times, which can accelerate the market introduction of new automated driving systems.
- Reduced removal and re-application efforts facilitate a more cost-effective test scenario alteration on proving grounds.
- Increased flexibility in applying road marking shapes enables reproducible tests of edge cases, which increases the gain of knowledge through testing.
- Reducing the prevalence of undesired phantom tracks on proving grounds increases the realism of proving ground tests.
This work’s main contribution is enabling engineers and scientists to improve automated driving systems faster and more cost-effectively. In addition, it allows for increased knowledge about a vehicle’s performance, which can subsequently improve the performance and behavioral competences of automated vehicles. In addition to this article’s contribution to the automotive domain, it can support the work of material engineers and scientists developing paints for similar use cases.
2. Related Work
A literature review was conducted using the search engine Google Scholar. Only English and German literature was screened since the literature regarding automated driving and road traffic infrastructure is predominantly published in these languages. The tags used were “temporary road marking”, “temporary road marking paint”, and “proving ground road markings”. Further relevant literature was identified through the reference lists of thematically relevant articles.
Road markings are common on public roads and regarded as a basic low-cost safety measure [12]. The relationship between road markings and automotive sensors is increasingly being investigated in the fields of automotive and civil engineering. Many recent studies in this context focus on the improvement of sensor technology to correctly detect and classify valid road markings—see, e.g., [13,14,15]. Since longer periods with a mixed traffic environment are expected, during which automated vehicles and human-driven vehicles share the roads [16], road markings need to possess high visibility for machine as well as human vision. The authors of [17] point out that specifications for road markings that are highly visible for humans can be transferred to facilitate high visibility for machines, too. According to [18], the recognizability of road markings through machine vision is dependent on the sensor system itself and the road markings’ retroreflectivity, structure, and color, and the type of glass beads used. The attributes of road markings change over time due to weather and overruns. Proper and frequent maintenance can support a constant and high visibility. To identify renewal demands, machine vision can be used [19]. Increasing numbers of vehicles equipped with machine vision can therefore present an opportunity for more efficient maintenance concepts and a generally improved road marking quality on public roads. Next to the long-term effects weather has on the visibility of road markings, lighting and road conditions (wet/dry) correlate with visibility [20]. Besides optical attributes, uniformity and standardization are expected to positively contribute to accelerating the performance improvements of automotive sensor systems that are intended for recognizing road markings [21].
The impact of the agile alteration of road markings on the number of tests of automated driving systems on proving grounds was revealed through two previous studies. An expert survey conducted in 2020 revealed the need for road markings that are easy to apply and remove for flexible scenario generation [22]. In addition, ref. [6] revealed that approximately one-quarter of road vehicle tests in published protocols from certifications, ratings, and standards have specifications for road markings.
The published literature on the use of temporary road markings for vehicle and sensor tests on proving grounds is scarce; however, articles investigating temporary road markings in general or for the use case of traffic control in construction zones were found. Commonly, either removable paint or tape are used. For temporary road markings, as well as for permanent road markings, visibility is crucial in both daytime and nighttime. To increase the reflectivity of the markings, especially at night, retroreflective beads can be used [23,24].
The requirements for temporary road marking paint relate to the visibility, removability, durability, and environmental compatibility of the material. The challenge in using road marking paint lies in being able to remove it completely without any residue on the road surface [25]. Removability and durability are partly perceived as conflicting objectives [26]. For temporary road marking paint, environmental compatibility is especially crucial since the removal process usually involves a liquid for dissolving the paint that drains into either a sewage system or adjacent nature [ibid.].
Studies regarding road marking tapes implied that the tape is mainly applicable for geometrically simple lane shapes [6] and must be removed properly to prevent safety hazards [27].
TRIWO Automotive Testing, a proving ground in Pferdsfeld, Germany, states on its website that they use special temporary road marking paint to provide a wide variety of shapes [28]. Another proving ground (Digitrans) in St. Valentin, Austria, is collaborating with SWARCO to provide temporary road marking paint to test automated driving systems [29].
To circumvent the limitation of the high application efforts needed for geometrically complex temporary road marking shapes for perception tests on proving grounds, water-based road marking paint could be effective. Hence, this study aimed at answering the research question of whether water-based road marking paint could be an effective material for use in concepts of the agile altering of road marking patterns. To be considered an effective material, a road marking paint should maintain a constant visibility over the course of a test drive and be removable without causing phantom tracks.
This study has an explorative character and does not examine correlations between ingredient quantities (independent variables) and changes in visibility or residue after removal (dependent variables) in consideration of weather influences and vehicle overruns (control variables).
3. Experiment
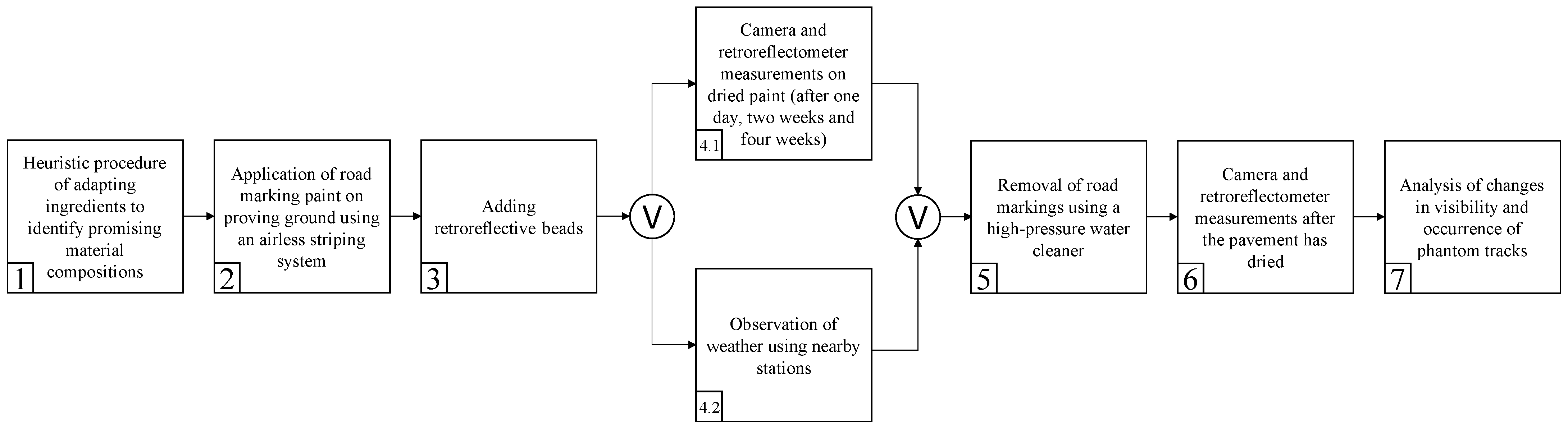
The experiment was conducted in two trial periods—one in 2022 and one in 2023—on urban areas at the MTC in Immendingen, Germany. Figure 2 shows the general experimental process followed for the second trial period. The process was improved between the first and the second trial periods. One change was the addition of retroreflectometer measurements. The exact times of measurement and application were adjusted based on the weather and the availability of measurement equipment. In the following section, a detailed description of each process step is provided.
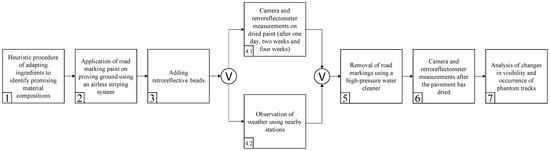
Figure 2.
Overview of the experiment’s process. The changes in visibility over time and the occurrence of phantom tracks after removing the paint were investigated.
3.1. Experimental Setup
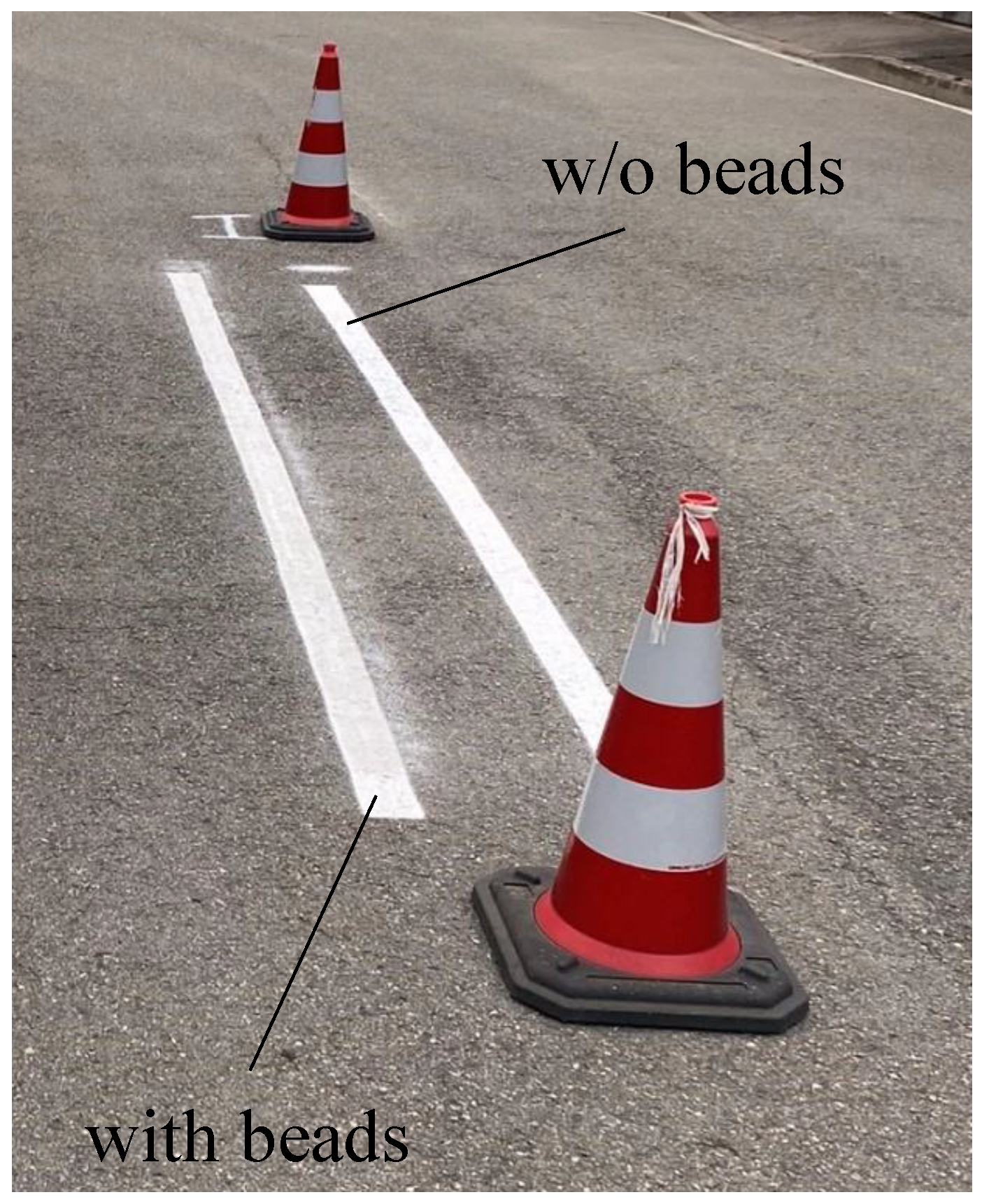
The first trial period was in August 2022, and the second one was in April 2023. In each trial, two different material compositions of water-based paint were applied as line segments with a width of 12 cm on asphalt (see Figure 3). The machine used was a LineLazer 3400 (Graco Inc., Minneapolis, MN, USA). Removal was conducted four to five weeks after the application. Four measurements were conducted over the course of each trial: (1) immediately after application, (2) after two weeks, (3) after four weeks (respectively five weeks during the trial phase in 2022), and (4) immediately after removal. This measurement cycle served as an orientation since it considered the typical durations of test drives (two or four weeks). The cycle served as a rough orientation for the measurement times during the first trial. As for the second trial, we strictly adhered to this schedule.
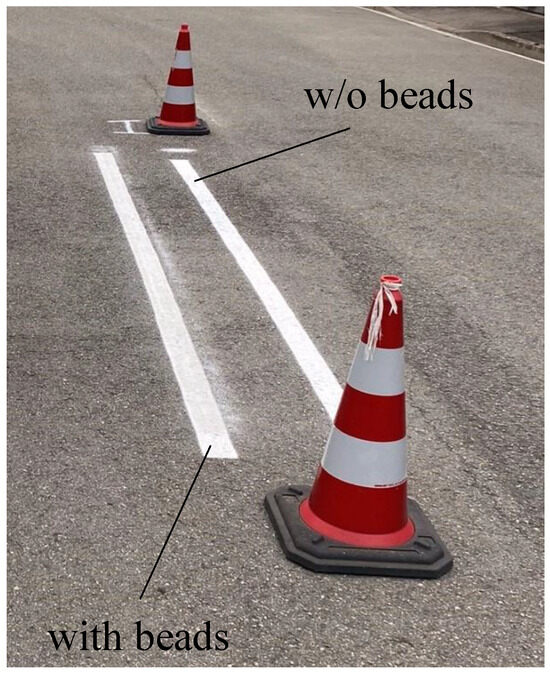
Figure 3.
Experiment setup (sample 3). Road marking paints were applied with and without retroreflective beads.
During the first experimental trial in 2022, two temporary marking paint samples were tested, which were shown to have adhesion exceeding the requirements. This caused insufficient removability leading to residuals and phantom tracks due to damage to the asphalt surface. Based on these results, the material properties of the paint were altered to decrease the adhesion. Following alteration, the second trial period in 2023 was conducted with improved paint samples. During the second trial, each sample was applied individually and with the supplement of retroreflective beads (Swarcolux P21 T14 M25 from SWARCO AG, Wattens, Austria). The road marking team dispersed the beads using a mechanical glass bead application apparatus mounted on the LineLazer 3400 to ensure uniformity across sample lines. Vehicle overruns over the sample lines were only made with the measuring vehicle while the test series was being carried out, otherwise the markings were cordoned off. During the first trial, a few, infrequent, slow vehicle overruns were conducted additionally.
After the last measurement, the temporary marking paint was removed with a high-pressure water cleaner (approx. 100 bar) to investigate whether phantom tracks were created after removal. It was checked whether these phantom tracks were visible on camera images and how strongly they were visible.
3.2. Samples
The road markings tested were temporary water-based paints. A total of four different material compositions were tested. A heuristic procedure was used to create material compositions for the four samples, during which the material ratios were continuously altered. The paint was applied and inspected on a small test area within the laboratory until the material composition showed promising effects. This resulted in four samples being chosen for the more thorough proving ground testing. Samples 3 and 4 were tested with and without the supplement of retroreflective beads, resulting in six different road markings. Please refer to Table 1 for an overview of the analyzed road markings. The four samples differed in binder content and coalescing agent content. In the first trial period, two samples with binder contents of 2 and 1.75% and coalescing agent contents of 1.75 and 1.5% were compared with each other. In the second trial period, the binder content of the two samples was reduced to 1.5 and 1%. Accordingly, the coalescing agent content of the samples was increased to 2.25 and 2.5%. The binder content is decisive for the adhesion between the paint and the pavement as well as between the individual ingredients. Additionally, it facilitates film formation. The binder content for the temporary paint samples was deliberately low to ensure easy removability. To ensure the reliable drying of the paint with such a low binder content, the coalescing agent is crucial. It helps reduce the risk for slow drying and crack formations. Furthermore, the coalescing agent affects viscosity and storage stability. Table 2 shows the ingredients of the four samples.

Table 1.
Tested temporary road markings.
Table 2.
Composition of ingredients.
3.3. Measurements
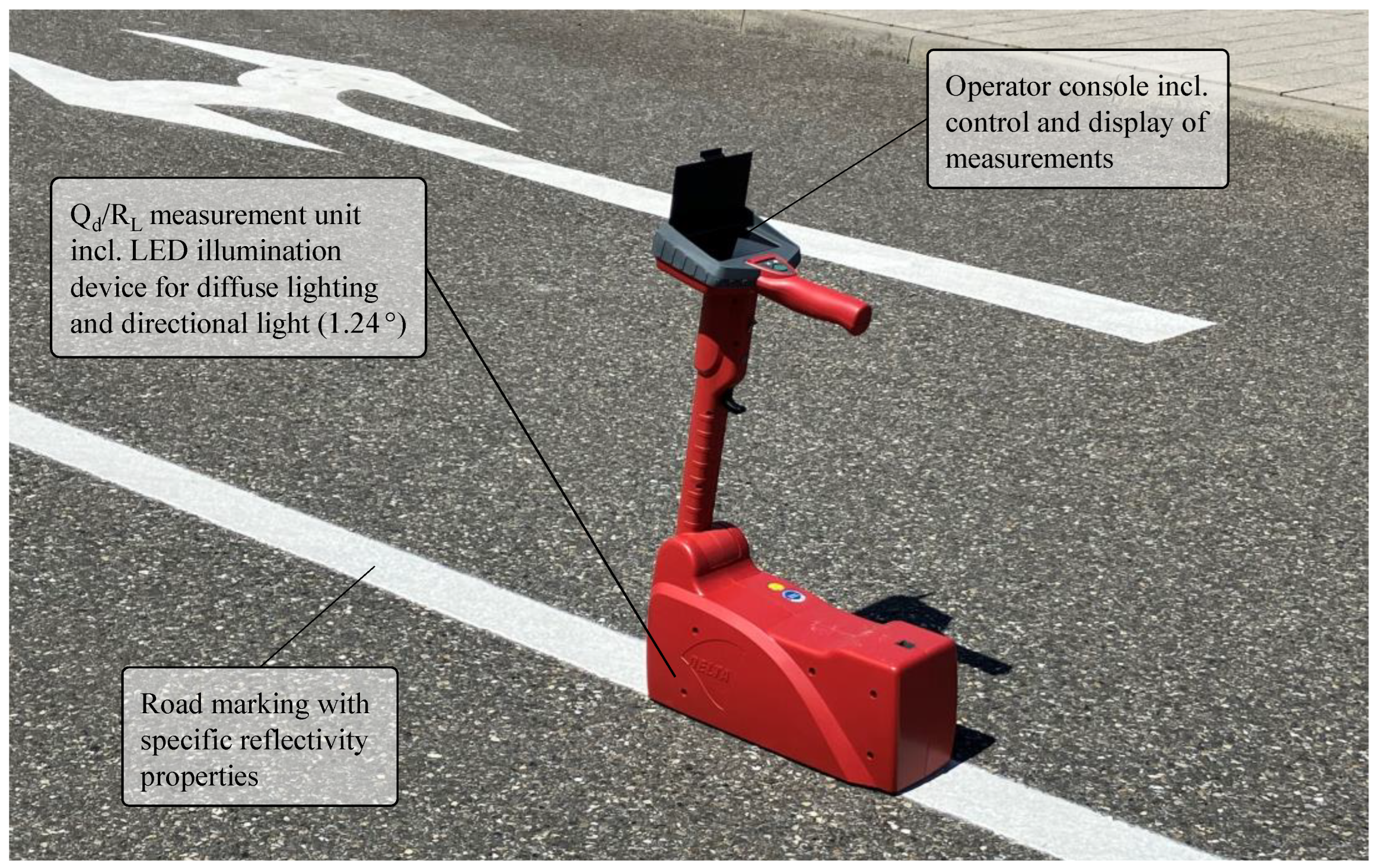
During the first trial period in August 2022, camera recordings of the road markings were made using a smartphone and the front camera of a Mercedes-Benz S-Class (W223), which is an SMPC5 S16 camera with a field of view of 70°. We drove over each sample at walking speed two times to create two recordings of each sample. For the second attempt in April 2023, in addition to camera recordings, retroreflectivity values were measured using a retroreflectometer (LTL 3500 from Traffic Data Systems GmbH, Hamburg, Germany; see Figure 4). Moreover, the camera recording method using a smartphone (iPhone 11) was improved to ensure a consistent camera orientation parallel to the ground and a consistent distance of 1 m toward the road marking. For the first trial in August 2022, the photographs were taken from an oblique, undefined angle. Regarding the retroreflectometer measurements, we measured the both the nighttime visibility and the daytime visibility of each sample in mcd/(lx × m2) four times and computed the mean. In addition, we measured the adjacent asphalt with the same approach to analyze the contrast between road markings and pavement based on retroreflection.
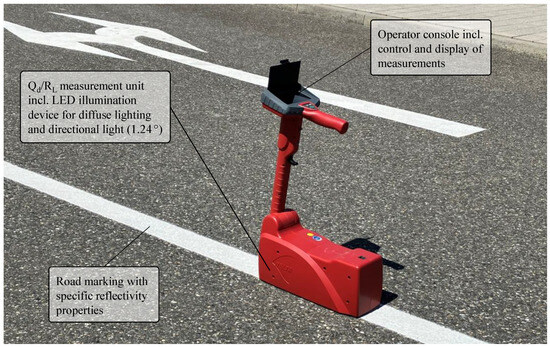
Figure 4.
Retroreflectometer measurement. The measurement device creates diffuse lighting similar to daylight conditions to measure diffuse reflectivity and directional light similar to the headlights of vehicles to measure retroreflectivity.
The measurements were always conducted when the asphalt was dry in the afternoon (approx. 2:00–4:00 p.m.). The first measurement of 2023 was conducted immediately after the road marking paint had dried on 29 March. First, reflectivity was measured, then the photographs were taken, and lastly the vehicle recordings were performed. The second measurement day was 12 April. Since the test vehicle was unavailable that day, only the retroreflectivity values and the recordings from the smartphone camera were collected. The vehicle recordings were performed one day later on 13 April. The third measurement and removal of the four samples was performed on 26 April—exactly two weeks after the second measurement, following the same procedure as for measurements one and two. After the third data collection, parts of the samples were removed using a high-pressure water cleaner. We then recorded camera footage using the test vehicle to analyze whether phantom tracks were visible. Because the ground was wet from the high-pressure cleaner, the retroreflectivity values and iPhone 11 recordings were performed under dry conditions one day later on 27 April. The premise of the project was that no permanent phantom tracks would remain after removal.
3.4. Data Evaluation
The goal of the data evaluation was to analyze temporal changes in the visibility of the road markings over the course of a test drive with a maximum duration of four weeks.
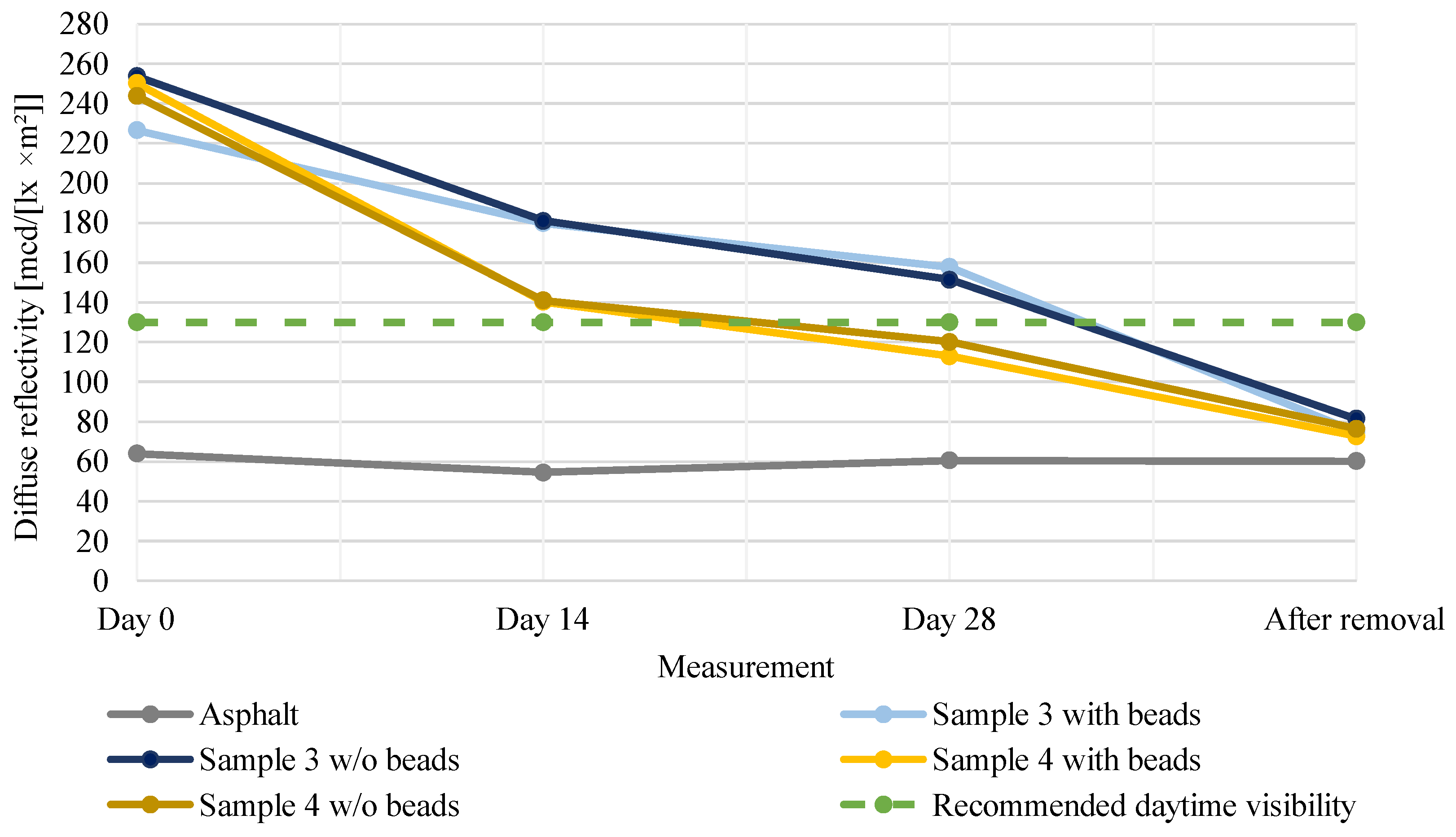
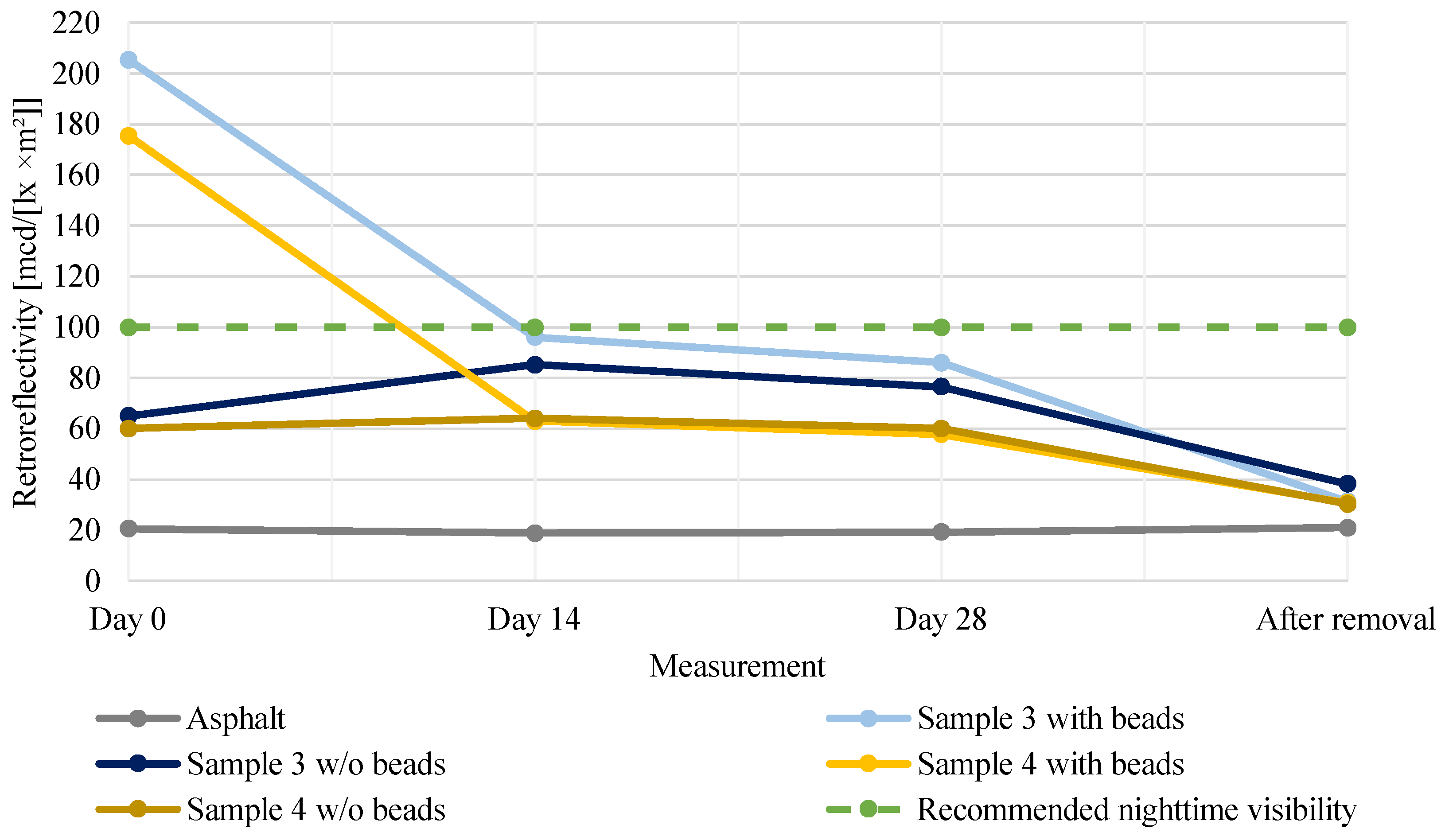
The data of the individual road marking lines recorded with the retroreflectometer were compared with the data of the asphalt. For the evaluation of reflectivity, the means of the four values collected per measurement per sample were determined. Subsequently, these means were compared to the recommended minimum values of the luminance coefficient for used road markings specified by the German Road and Transportation Research Association (Forschungsgesellschaft für Straßen- und Verkehrswesen or FGSV) [7]. These values define the requirements for the visibility of road markings in daylight and nighttime conditions for Germany. Figure 5 shows the measurement results for daytime visibility (Qd). The dashed horizontal green line marks the minimum value, which was set at 130 mcd/(lx × m2). For the values of nighttime visibility (RL), the threshold was set at 100 mcd/(lx × m2), as can be seen in Figure 6. According to the FGSV, the determination of the luminance coefficient is only comparable when the marking surface is dry. Thus, the data were collected one day after removal, as the asphalt was initially wet from the removal with the high-pressure water cleaner.
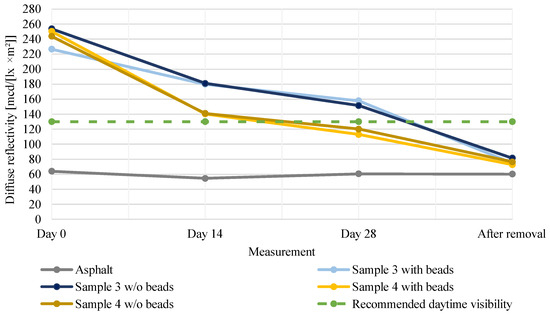
Figure 5.
Diffuse reflectivity (daytime).
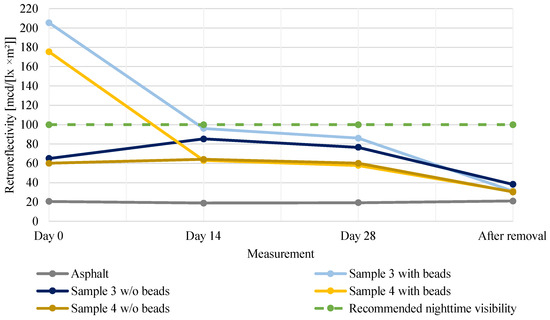
Figure 6.
Retroreflectivity (nighttime).
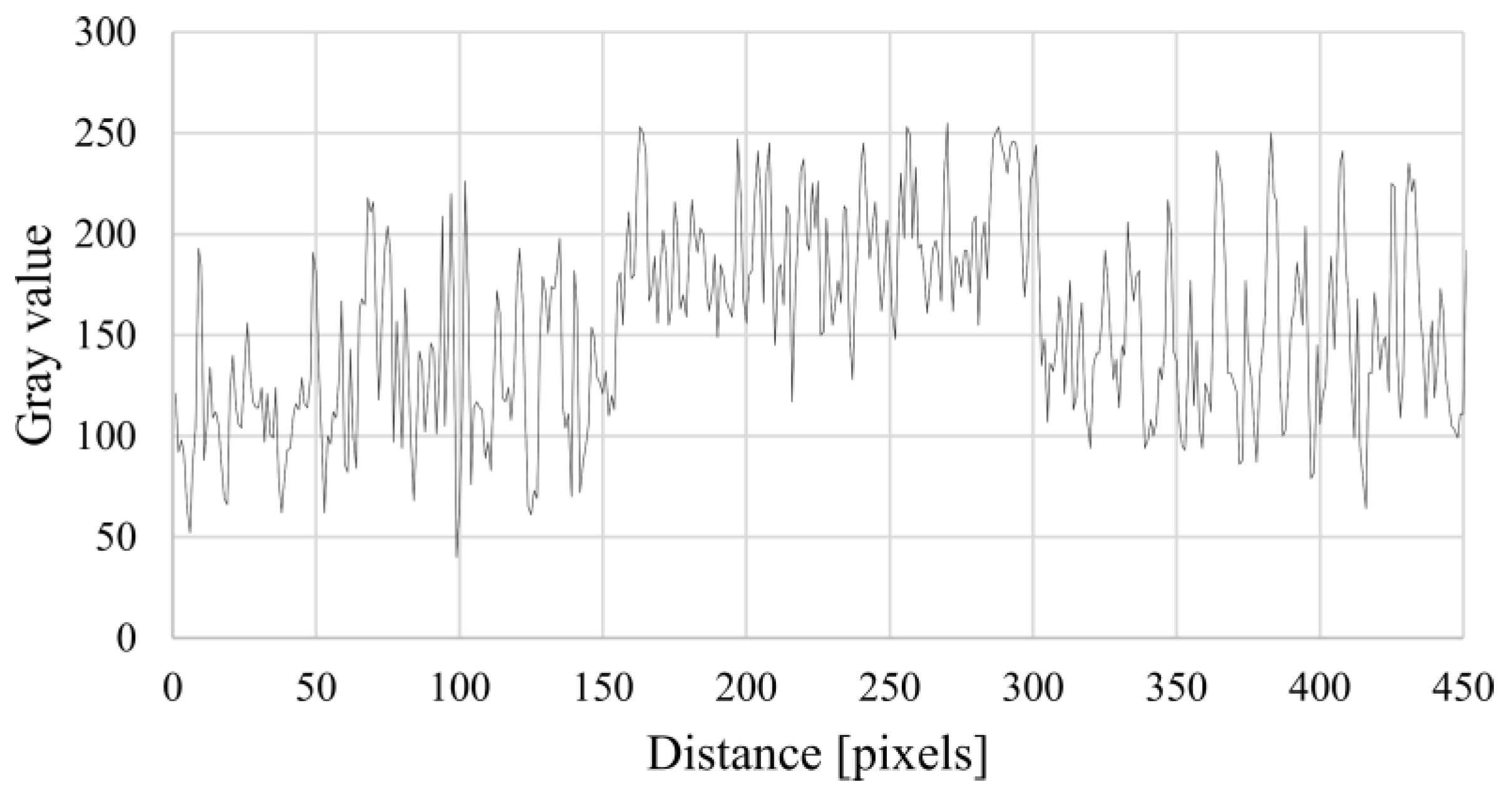
For camera sensors, a key attribute for visibility is the contrast between the road marking and the pavement. To analyze the contrast, we used RGB images created with a smartphone. The smartphone images allowed a better analysis of the contrast compared with the vehicle camera images due to the direct, parallel orientation toward the road marking on the ground. We converted the RGB images into grayscale images using the software GIMP (Version 2.10.24). We then created grayscale plots (8-bit scale) using the software ImageJ (Version 1.54d 30 March 2023) to analyze the difference between the asphalt and the paint. This was achieved by comparing the intensity of the pixels in a selected area of the road marking paint with the unmarked road surface. The gray values are dependent on the incidence of light [6]. Hence, this analysis only allows for a comparison with the adjacent road surface but not with a measurement from another day, since weather differences affect diffuse lighting.
3.5. Weather during the Experiment Phase
As the tested paint is soluble in water, weather, especially precipitation, is expected to have a significant impact on the durability of these road markings. Since the road marking paint was tested outdoors, precipitation data were crucial for the interpretation of the results. The methodological decision to test the paint outdoors was made for the benefit of a more realistic test environment regarding weather, pavement, and usage (i.e., overruns by test vehicles during the first trial).
During the first trial period in 2022, temperatures averaged between 13 °C and 26 °C, with a minimum value of 8 °C and a maximum value of 34 °C. The mean temperature was 19.8 °C. Precipitation was relatively low during this time, occurring on a total of 11 out of 35 days. The maximum precipitation intensity recorded was 54.7 mm/h. It occurred four days prior to the removal.
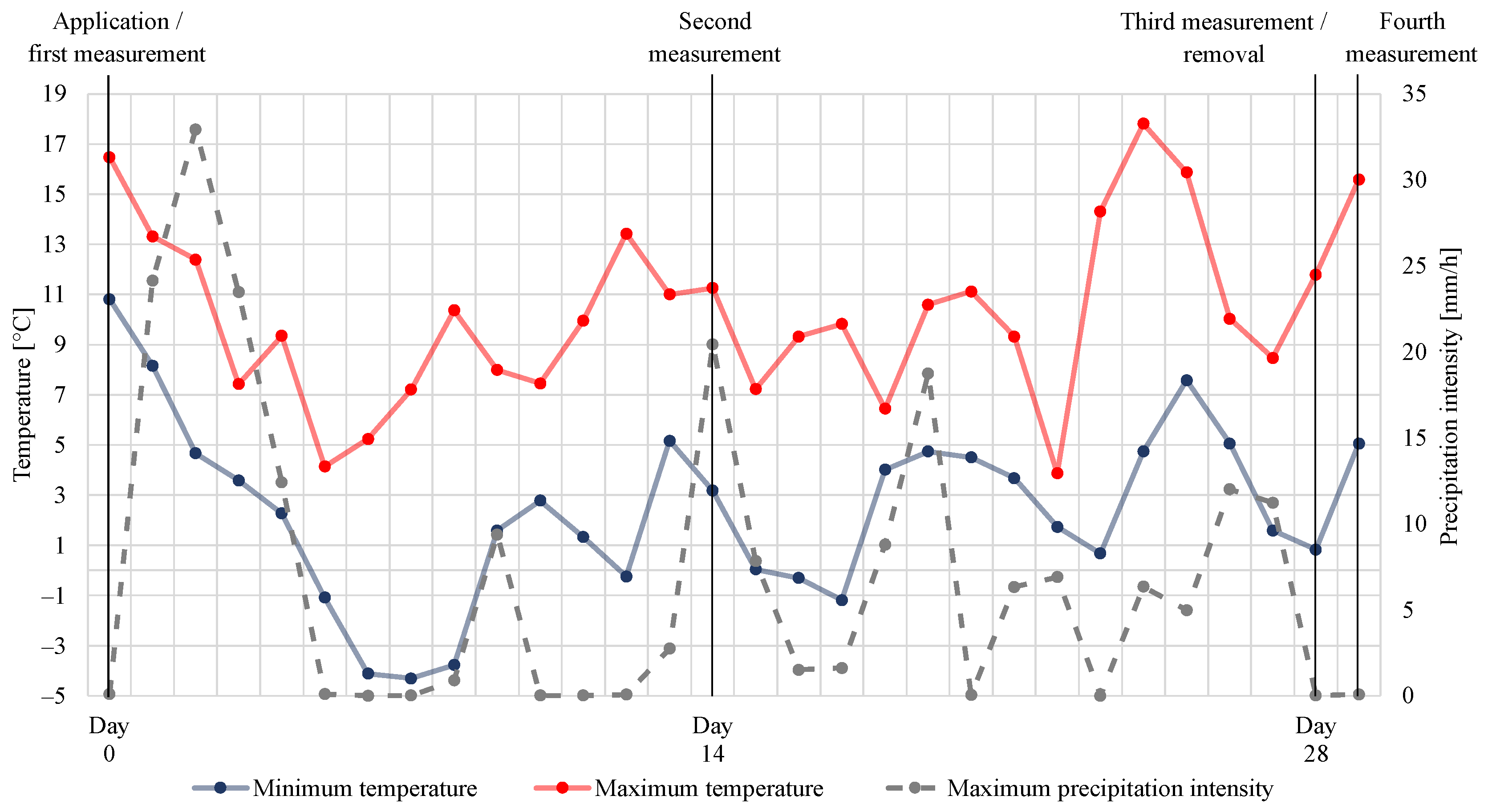
Figure 7 presents an overview of the meteorological data during the second experimental period in 2023 in which samples 3 and 4 were tested. Temperatures significantly fluctuated between −4 °C and 18 °C. The mean temperature for the trial period was 5.7 °C. On the third day after the day of application, a precipitation event of up to 33 mm/h precipitation intensity occurred. Between the measurements on days 14 and 28, multiple smaller precipitation events were recorded. Rain occurred on 27 out of 30 experiment days.
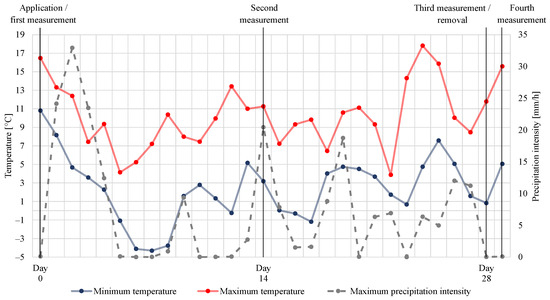
Figure 7.
Weather during experiment phase in 2023.
4. Results
From the tested water-soluble temporary road marking paints, the paint with 1.5% binder content and 2.25% coalescing agent content provided the best balance between durability and removability, which are key attributes for the use case of applying maneuver markings for vehicle tests on proving grounds. Fourteen days after the application, the visibility dropped below the recommended threshold for permanent marking in public traffic. Hence, based on weather conditions, renewal might be necessary over the course of a test drive. Furthermore, a lack of reproducibility needs to be considered.
4.1. Reflectivity
Reflectivity was only measured during the second trial phase for samples 3 and 4. Figure 5 and Figure 6 show the reflectivity of the two samples from the second trial with and without retroreflective beads as well as the reflectivity of the asphalt surface. The y-axis shows the reflectivity value, and the x-axis shows the measurement instance. Included in the figures is the measurement of reflectivity immediately after the removal of the paint. Hence, the data presented in this part of the figures do not show the measurements of the paint—they show the measurements of the asphalt at the location where the paint was before removal to detect potential phantom tracks.
Figure 5 shows the diffuse reflectivity (daytime visibility). The diffuse reflectivity of the asphalt is similar for all measurements (55–64 mcd/(lx × m2)). Small fluctuations might be caused by different degrees of wetness. Both samples (with and without retroreflective beads) still provide sufficient visibility after two weeks; however, after four weeks, only sample 3 is above the threshold value of 130 mcd/(lx × m2). It can be noticed that the daytime visibility degradation is significantly higher within the first two weeks. A potential explanation for this initial decrease is provided by the measured precipitation intensities over the course of the experiment. Rainfalls with high precipitation intensities occurred within the first week of the experiment between 30 March and 1 April 2023, and possibly washed away the retroreflective beads. The diffuse reflectivity values after the removal range from 73 mcd/(lx × m2) for sample 4 with beads up to 83 mcd/(lx × m2) for sample 3 without beads, which is above the asphalt’s diffuse reflectivity of 60 mcd/(lx × m2). This indicates phantom tracks. However, the diffuse reflectivity was lowered significantly by the removal process. A reason for the higher diffuse reflectivity after the paint was removed could be that the high-pressure water cleaner removed smaller particles between the construction aggregate particles, exposing reflective rock. This effect could fade over time as the crevices are filled with dust and abrasion by weather and vehicle overruns.
Figure 6 represents the retroreflectivity (i.e., the nighttime visibility) of the road markings. The retroreflectivity of the asphalt remains similar for all measurements in a range of 19–21 mcd/(lx × m2). Both samples 3 and 4 show degradations in visibility over time, especially within the first two weeks, when glass beads were used. As expected, the retroreflectivity initially is significantly higher when beads are used, which confirms the effectiveness of the beads. For sample 4, the retroreflectivity of the line with beads drops to the same level of the line without beads, which suggests that beads were removed during the first two weeks, possibly due to rain. The retroreflectivity of sample 3 is noticeably higher than the retroreflectivity of sample 4. Only sample 3 with beads can be assumed to be above the recommended visibility threshold of 100 mcd/(lx × m2) during the first two weeks, since it was just marginally below the threshold (96 mcd/(lx × m2)) at the time of measurement. The sample was therefore categorized as a class R2 road marking (RL ≥ 100 mcd/(lx × m2)) according to EN 1436 [30]. After the removal, the phantom track measurements revealed values between 30 mcd/(lx × m2) for sample 4 without beads and 38 mcd/(lx × m2) for sample 3 without beads, which is above the values of adjacent asphalt at 21 mcd/(lx × m2).
4.2. Contrast
The first trial period in 2022 showed that samples 1 and 2 could still provide a very good contrast to the asphalt after more than four weeks. The measurement revealed a mean gray value of 239 for the painted line compared to a mean gray value of 108 for the adjacent pavement. The experiment was conducted in July and August of 2022 and only three small rain events occurred. Since the asphalt was damaged and phantom tracks were created in the process of removing the markings with the high-pressure water cleaner, the samples were labeled as improper despite their good durability and visibility.
The contrast evaluation for samples 3 and 4 in general shows smaller contrasts than for samples 1 and 2; however, this result might be influenced by the incidence of light since the weather was much sunnier during the first trial period. The maximum solar radiation per day ranged from 411 W/m2 to 1174 W/m2 (Mean = 988 W/m2) during the first trial period compared to 346 W/m2 to 1142 W/m2 (Mean = 793 W/m2) during the second trial period.
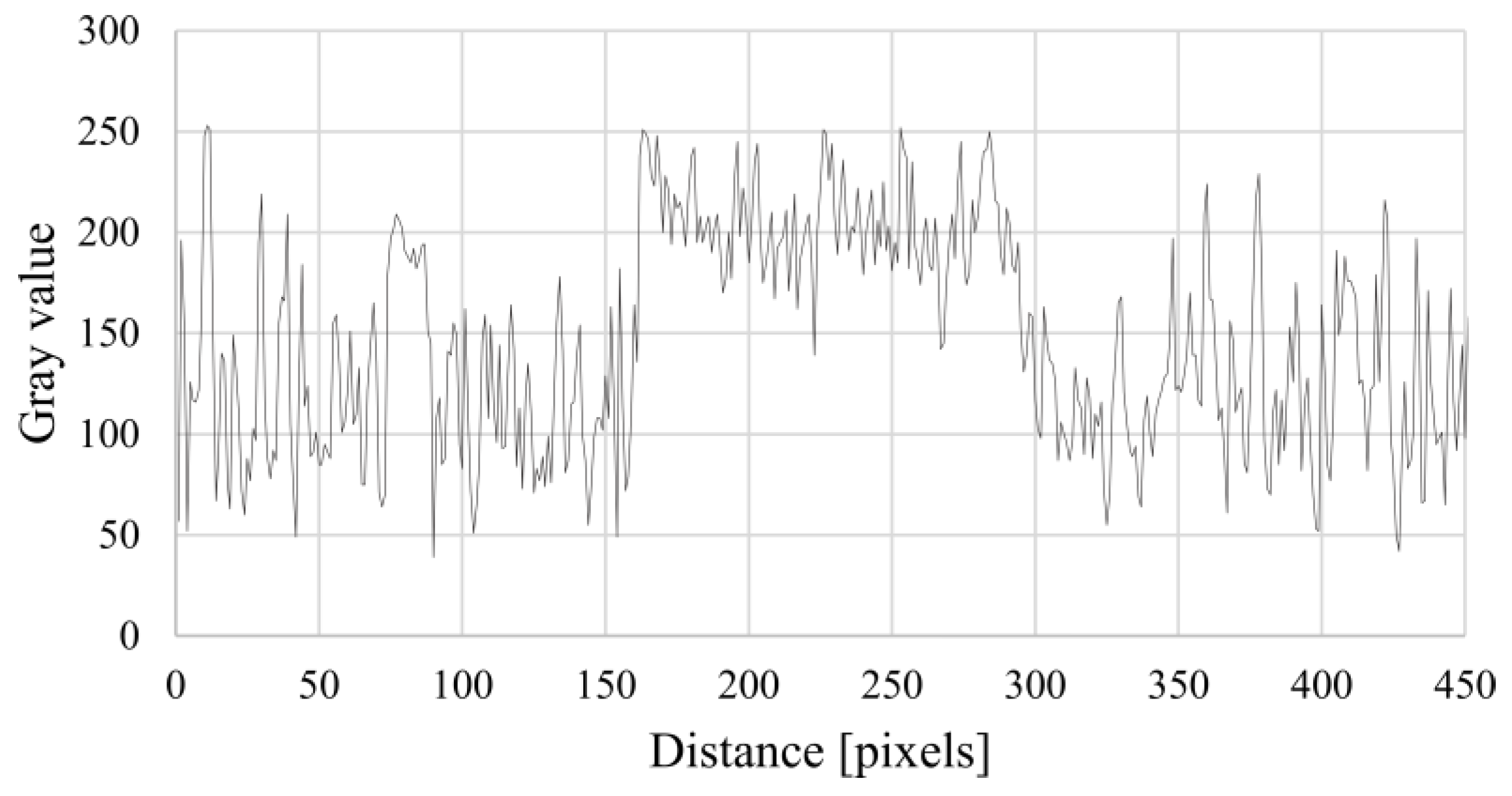
The contrast between the unmarked road and the road marking is sufficiently high for samples 3 and 4 with and without beads immediately after the application. The contrast of sample 4 deteriorates with time more than the contrast of sample 3. Even though a contrast is still recognizable for sample 4 after 28 days (see Figure 8), the risk of false negatives in camera-based lane marking detection systems should not be neglected. The contrast for sample 3 (with and without beads) provides for a clear edge after 28 days (see Figure 9). The utilization of beads did not affect the contrasts significantly for either sample.
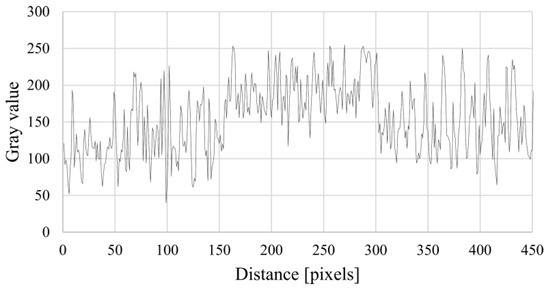
Figure 8.
Contrast for sample 4 without beads after 28 days.
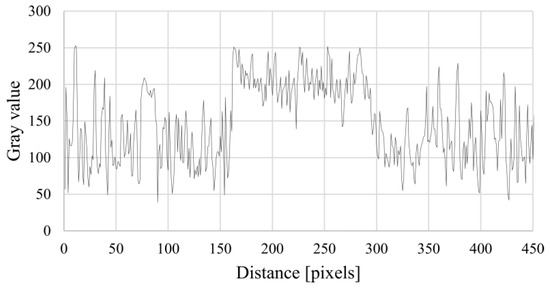
Figure 9.
Contrast for sample 3 without beads after 28 days.
After the removal, no difference in contrast between the spot on the asphalt where the line was applied and the adjacent asphalt could be recognized (see Appendix A).
4.3. Removability and Residue
The removal process of samples 1 and 2 was not simple and required multiple cleaning loops, which resulted in damaging the asphalt and still having paint residue at the end. Three undesired effects occurred:
- Phantom tracks;
- Reduced pavement durability, which results in higher maintenance costs;
- Changes in friction.
Samples 3 and 4 could be removed more easily. However, the reflectivity of the asphalt beneath the road marking paint was higher than the adjacent asphalt, which indicates that phantom tracks could be detected by LiDAR sensors. Since the contrast measurements did not show significant differences in gray values between the asphalt beneath the road marking paint and the adjacent asphalt, we assume a lower risk for camera sensors to detect phantom tracks. Figure 10 shows the removal process as well as the asphalt after the removal.

Figure 10.
Removal and residue of sample 3.
The liquid paint before application is classified as slightly hazardous to water (WGK 1) based on the German ordinance on facilities for handling substances that are hazardous to water [31]. As soon as the material is hardened after its application, all hazardous substance is bound and does not dissolve anymore. Hence, after the material is removed, it needs to be disposed of as regular commercial waste. It should therefore be collected and disposed of according to local regulations.
5. Discussion
Sample 1 (binder = 2%; coalescing agent = 1.75%) and 2 (binder = 1.75%; coalescing agent = 1.5%) provided the highest contrast values and the least degradation over the course of four weeks, which is the typical maximum length of a test drive on a proving ground. However, since damage to the asphalt surface occurs when removing these materials, we do not recommend its utilization for agile altering of road marking patterns to test road vehicles. From the tested material compositions in the second trial, sample 3 (binder = 1.5%; coalescing agent = 2.25%) with beads resulted in the best overall visibility regarding reflectivity and contrast. In addition, the risk for phantom tracks is low; however, the retroreflectivity of the road was influenced, which could result in LiDAR systems detecting false positives.
In direct comparison to concepts using road marking tape [6], the water-soluble paint has clear drawbacks, notably the following:
- Much lower visibility: the tape recommended in [6] consistently had a reflectivity greater than 600 mcd/(lx × m2);
- Lower reproducibility: the contrasts of tape were less altered during the course of a test drive and the edges stayed straighter;
- The mechanical process for removal increases the risk of phantom tracks;
- Rainfalls have a greater effect on the durability.
Besides these drawbacks, the paint allows the application of complex geometric shapes, such as symbols and text. Hence, we recommend using sample 3 for test drives with a short duration that require complex shapes. Retroreflective beads should only be used when high retroreflectivity is desired for a test (e.g., of a LiDAR system), since the visibility for camera sensors was not significantly increased by using beads. We suggest renewal of the road marking patterns after rainfalls with precipitation intensities >15 mm/h or rain falls with smaller precipitation intensities that last for longer periods. However, even when these maintenance requirements are fulfilled, sufficient reproducibility might still not be achieved depending on the test case in scope. For test drives that do not require complex road marking shapes, we recommend the usage of tape according to [6].
The removability was higher when the binder content was lower. The visibility (contrast) after four weeks was higher when the binder content was higher. This shows a trade-off between removability and durability. Sample 3 provides an acceptable balance between these two opposing factors. In the context of this research, a road marking paint was desired that did not deteriorate over time but could be removed easily on demand and without residue. A decent method of removing permanent road markings without residue is ultra-high-pressure low-volume water blasting [32]; however, the machinery and procedure required to generate up to 3500 bar, as shown in [33], is cumbersome and therefore costly to use. A set of methods to remove temporary road markings in construction zones can be found in [27]. This study suggests using non-MeCl chemical stripping as a removal technique, which might be suitable for removing temporary, water-based road marking paint on automotive proving grounds as well. However, in contrast to temporary road marking paints for construction zones on roads, the paint for proving grounds is usually stressed less by overruns. Hence, the wear resistance requirements are lower, which results in less chemical and physical force being required for removal. Whether non-MeCl chemical stripping is suitable for this use case or not should be investigated further.
This experiment showed that samples 3 and 4 deteriorated rapidly after application and remained at a constant level after the first degradation phase. Figure 6 shows that the retroreflectivity barely changed during day 14 and day 28. Hence, the paint might be used to create reproducibly damaged or worn road markings for lane recognition tests [34]. With constant performance improvements of lane detection systems, it is plausible to assume that the importance of reproducible, worn road markings will rise.
Due to the different weather influences between the first trial phase in 2022 and the second trial phase in 2023, this study is limited in a sense in that the results from these two phases cannot be compared to each other. Furthermore, we utilized a smartphone camera and a parallel orientation toward the road marking to measure the contrast. Angles of forward-facing vehicle cameras might result in different contrasts perceived by the driving system. In addition, the retroreflectivity measured immediately after the application might be higher when a different type of retroreflective bead is used. For the tested road markings with retroreflective beads, visibility is most likely not only attributed to the paint but also to the beads. The adhesive properties of different types of beads might also influence the changes in visibility of the road marking over time. Suggestions regarding the maintenance of the road marking paints after rain events could be improved by investigating the correlations between the durability of the road marking paint and precipitation parameters in a different experimental setup. Individual, intense precipitation events could have a greater impact on the durability than longer-lasting rainfalls with lower precipitation intensities or vice versa.
The threshold values for retroreflectivity from German standards were selected since the proving ground where the experiment was conducted is in Germany. In addition, the German threshold values for the reflected luminance of used road markings of 100 mcd/(lx × m2) at night (retroreflectivity) and 130 mcd/(lx × m2) during the day (diffuse reflectivity) [7] are among the highest requirements in an international context. For instance, the minimum value for China is 80 mcd/(lx × m2) retroreflectivity [9]. In the United States of America, the minimum retroreflectivity is 50 mcd/(lx × m2) for driving speeds between 35 and 70 mph and 100 mcd/(lx × m2) for driving speeds greater than 70 mph [8]. However, there are examples of higher minimum threshold values, such as in the United Kingdom where 150 mcd/(lx × m2) is required for used road markings in unlit areas [10].
This study’s aim was to examine whether the usage of water-based paint for road markings with complex geometric shapes for vehicle tests on proving grounds is generally a promising approach. For economic reasons, only four paint samples were manufactured and tested. Based on the results, a more thorough investigation is recommended that investigates correlations between different percentages of binder, coalescing agent, and pigment (independent variables) and changes in visibility as well as residue after removal (dependent variables) while controlling for effects from vehicle overruns and different weather parameters (precipitation, temperature, humidity, etc.). Appendix B provides a research model for a follow-up study. The considered independent and control variables are expected to significantly correlate with changes in visibility over time and removability without creating phantom tracks. One desired attribute of temporary road marking paint for test maneuvers on proving grounds is that the visibility does not change over the course of a test drive. We have defined durability as the paint’s capability to resist removal by precipitation and vehicle overruns. Yet, another target attribute of the paint is that it is easily removable on demand without leaving phantom tracks (i.e., residuals of paint or the altered macro texture of the asphalt). These target values do not necessarily provide a trade-off scenario since the removal technique could be of a different nature than natural removal by rain or vehicle overruns; however, in practice, a trade-off is present since high-pressure water jet cleaning is a simple method of removal that uses a similar working principle to rainfall (i.e., accelerated water). To analyze the relationship between independent variables and dependent variables while considering the control variables, a variance analysis such as a multivariate analysis of covariance (MANCOVA) could be used. Previously computing a correlation matrix could indicate what variables could be excluded.
The expected gain of knowledge for a follow-up study is a better understanding of what material compositions should be used under specific weather conditions. In addition, the material composition might be improved to allow better values for the consistency of visibility over the course of a test drive and a higher resilience against weather influences.
The research model proposed in Appendix B is designed for an outdoor experiment or a living lab with varying material composition. Based on the results of this experiment, precipitation is expected to have major influences on the durability and therefore changes in the visibility of water-soluble paint. Hence, examining correlations using an indoor experiment with a controllable irrigation system and temperature regulation to simulate weather conditions might provide further insight into the effects precipitation has on road marking paint. In the inferential analysis of an indoor experiment, weather influences could be regarded rather as independent variables; however, weather might moderate the relationship between the percentages of material ingredients and the consistency of visibility. Regarding the material, we suggest varying the values of the binder, coalescing agent, and pigment. Regarding the precipitation, we suggest varying the values of maximum precipitation intensities of 0, 10, 20, and 30 mm/h with a constant duration of 10 min. Water-based paint bonds to the pavement through water evaporation. Hence, it is expected that the temperature and humidity during the application process and within the hours after application is decisive for the durability and therefore the change in visibility.
A few years ago, before the need to test the lane detection competences of automated vehicles grew significantly, standard permanent road markings designed for public traffic were customary for use on proving grounds. Common materials used for permanent markings on public roads are paints, reactive (cold plastic) materials, thermoplastics, and permanent tape (i.e., foils) [35]. Road markings on proving grounds experience fewer overruns compared to heavily trafficked public roads. Thus, high-solid paint is often sufficient for use on proving grounds. The following Table 3 compares the three different road marking materials (high-solid paint, temporary tape, and the special water-soluble paint investigated in this study) for the use case of altering road markings on automotive proving grounds. The comparison shows that tape combines the benefits of permanent road markings (i.e., high and consistent visibility) and those of temporary road markings (low removal efforts and minimal phantom tracks). For edgy road markings, such as small radii, letters, or symbols, standard 100 m rolls with a width of 150 mm are not suitable due to their lack of plasticity and high efforts for application. Prefabricated tape tailored to the required shape could mitigate this drawback; however, this solution would require significant procurement efforts since proving grounds need to provide numerous region-specific road marking shapes that are mostly supplied to a specific market as off-the-shelf products. For these use cases, paints are advantageous since these can be applied using stencils. While permanent paint does not significantly deteriorate in terms of visibility, it causes phantom tracks when removed using milling due to damage to the pavement as well as paint residue. In proving ground operations, where patterns need to be changed frequently, this constant alteration process including milling would eventually result in a test track full of phantom tracks. Samples 3 and 4 of the water-soluble paint caused a change in the reflectivity of the asphalt when removed, even though the asphalt did not appear damaged to the human eye, indicating faint phantom tracks that might fade over time. The main drawback of this material is its lower consistency in visibility which decreases the reproducibility of tests and requires frequent renewal efforts. Hence, the water-soluble paint is mainly recommended for test drives of a few days with low precipitation for which edgy road marking shapes are required.
Table 3.
Comparison of materials for alteration of road markings on proving grounds.
An important criterion not listed in Table 3 is the realism of appearance to camera- and LiDAR-based perception systems. It is not listed because this evaluation requires more research and is dependent on the specific sensor in scope. The road markings applied in a proving ground should realistically represent road markings from public roads; however, road marking materials on public roads differ based on legal requirements, region, manufacturing procedures, availability, use cases, expected overruns, maintenance concepts, budgets, and weather. Additionally, the visibility of road markings on public roads changes over time due to weather and overruns. Hence, there is no clear specification for the realism of road markings. Different indicators characterizing road markings can be found in the published literature [36]. In theory, a statistical analysis could be conducted to identify the most prevalent types of road markings on public roads; however, the most prevalent types of road markings are not necessarily the ones that are the most challenging or relevant for automated driving systems. Due to these reasons, we based our investigation on the minimum requirements found in standards for public roads [6,7,8,9]. Common permanent road marking, such as high-solid paint, is manufactured and certified for public roads. Therefore, it realistically represents new road markings. Similarly, the temporary tape used in [5] is eligible for the use on public roads. Both materials can therefore be classified as realistic. The temporary water-soluble paint investigated in this study is not recommended for use on public roads due to its low durability and visibility after a few weeks. For LiDAR sensors to recognize road markings, a reflectivity higher than the surrounding pavement is essential [37]. For standard camera sensors, a noticeable contrast between the road marking and the pavement is required [13]. Sufficient reflectivity can be reached with water-soluble paint by using glass beads, which are also commonly used on public roads to increase the retroreflectivity of road markings [23]. Hence, we expect that the road markings with temporary paint will be visible for LiDAR sensors intended for use on public roads. Sample 3 still showed a noticeable contrast difference after 28 days (see Figure 9). Likewise, we expect visibility for standard automotive camera sensors used for lane detection. Since camera- and LiDAR-based sensor systems are expected to perceive temporary road marking paint as regular, real road markings, they are qualified for validation tests on proving grounds. For verification tests or tests that require high reproducibility, changes in the visibility of the road marking should be observed to maintain a constant visibility. In these cases, temporary tape or permanent road markings might be more suitable.
Improvements in the methods used to test automated vehicles facilitate better knowledge about the performance of the developed vehicles. This knowledge is the foundation for the approval and subsequently the market introduction of new automated driving systems. These systems bear the potential to increase safety, efficiency, mobility, and comfort in road traffic [38]. The results of the performed study contribute to realizing these potentials.
6. Conclusions
This study’s results suggest that water-based road marking paint provides a suitable material to apply temporary road marking patterns that have delicate geometric shapes. Paint with 1.5% binder content and 2.25% coalescing agent content provided the best balance between removability and visibility. However, the reproducibility, especially after rainfalls, was lower compared to road marking tape. If the temporary road marking paint is used for other purposes than to test vehicle sensors, its reproducibility constraints are neglectable. The insight provided by this study can support proving ground operators and vehicle testers to validate the performance of driving systems in an agile manner. This concept increases the number of tests that can be conducted at one proving ground. Since the approach of using water-soluble road marking paint on proving grounds has been shown to be potentially beneficial to automotive testing processes, a holistic concept that combines temporary tape as well as temporary water-soluble paint should be developed to fulfill future testing demands for automated driving systems in an efficient manner. Automotive proving grounds are supposed to be a realistic representation of public roads. Parallel to the development of automated vehicles, civil engineers are working on improving the visibility of road markings for human drivers as well as automated vehicles. For proving grounds to realistically represent road markings on public roads, the proposed concepts for the agile alteration of road marking patterns on test tracks should be reviewed and updated regularly. Furthermore, a close collaboration between automotive engineers and road engineers in development projects is highly recommended to ensure that the overall system of road transportation is as safe as possible.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/app14167362/s1, Table S1: Data on Reflectivity for Figure 5 and Figure 6; Figure S1: Contrast Plots for Sample 4; Figure S2: Contrast Plots for Sample 3; Figure S3: Contrast Plots for Pavement after Removal.
Author Contributions
Conceptualization, N.K.; methodology, N.K.; validation, N.K., L.-M.L. and L.S.; formal analysis, N.K., L.-M.L. and L.S.; investigation, L.-M.L. and L.S.; data curation, N.K., L.-M.L. and L.S.; writing—original draft preparation, N.K., L.-M.L. and L.S.; writing—review and editing, N.K.; visualization, N.K., L.-M.L. and L.S.; supervision, N.K.; project administration, N.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The original contributions presented in the study are included in the article and the Supplementary Materials. Further inquiries can be directed to the corresponding author. For confidentiality reasons, image data and detailed material ingredients cannot be shared.
Acknowledgments
We would like to express our gratitude to Patrick Wesche, Oliver Menges, and Mario Langer for their support with the experiment. In addition, we thank Reiner Imdahl for the discussions during the ideation phase prior to the research project. Finally, we thank Mercedes-Benz AG and SWARCO LIMBURGER LACKFABRIK GmbH for the provisioning of materials and equipment.
Conflicts of Interest
The authors declare no conflicts of interest.
Appendix A
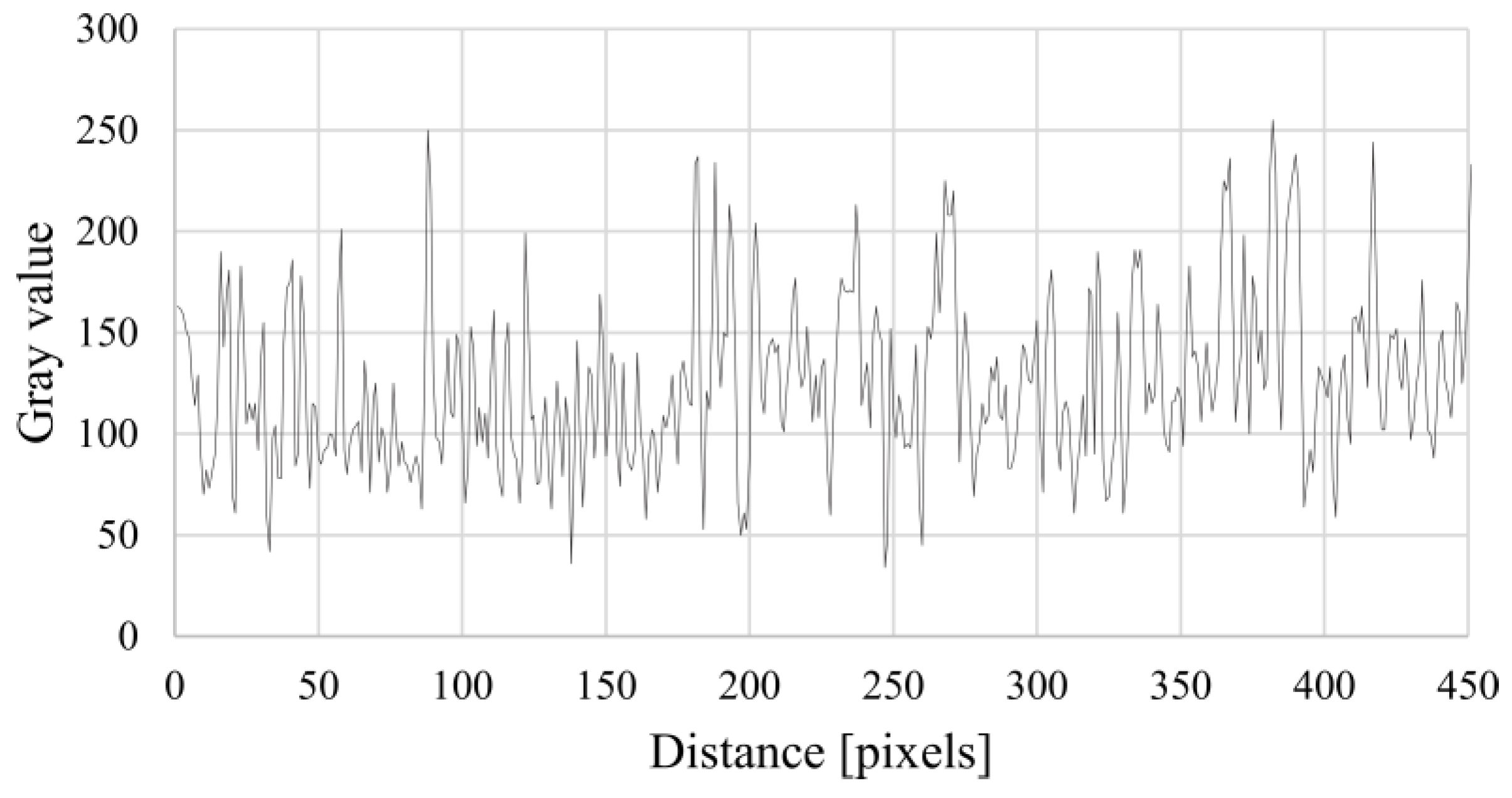
Figure A1 shows the contrast after the removal of the paint. Due to the lack of a clear contrast difference between the road marking and the pavement, it is unlikely that lane-recognition sensor systems will perceive the remains as a valid lane marking.
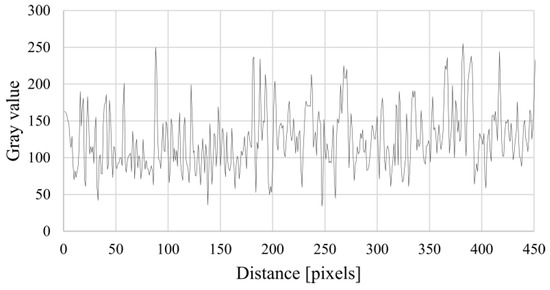
Figure A1.
Contrast between the spots on the road where sample 3 without beads was removed and the adjacent pavement.
Figure A1.
Contrast between the spots on the road where sample 3 without beads was removed and the adjacent pavement.
Appendix B
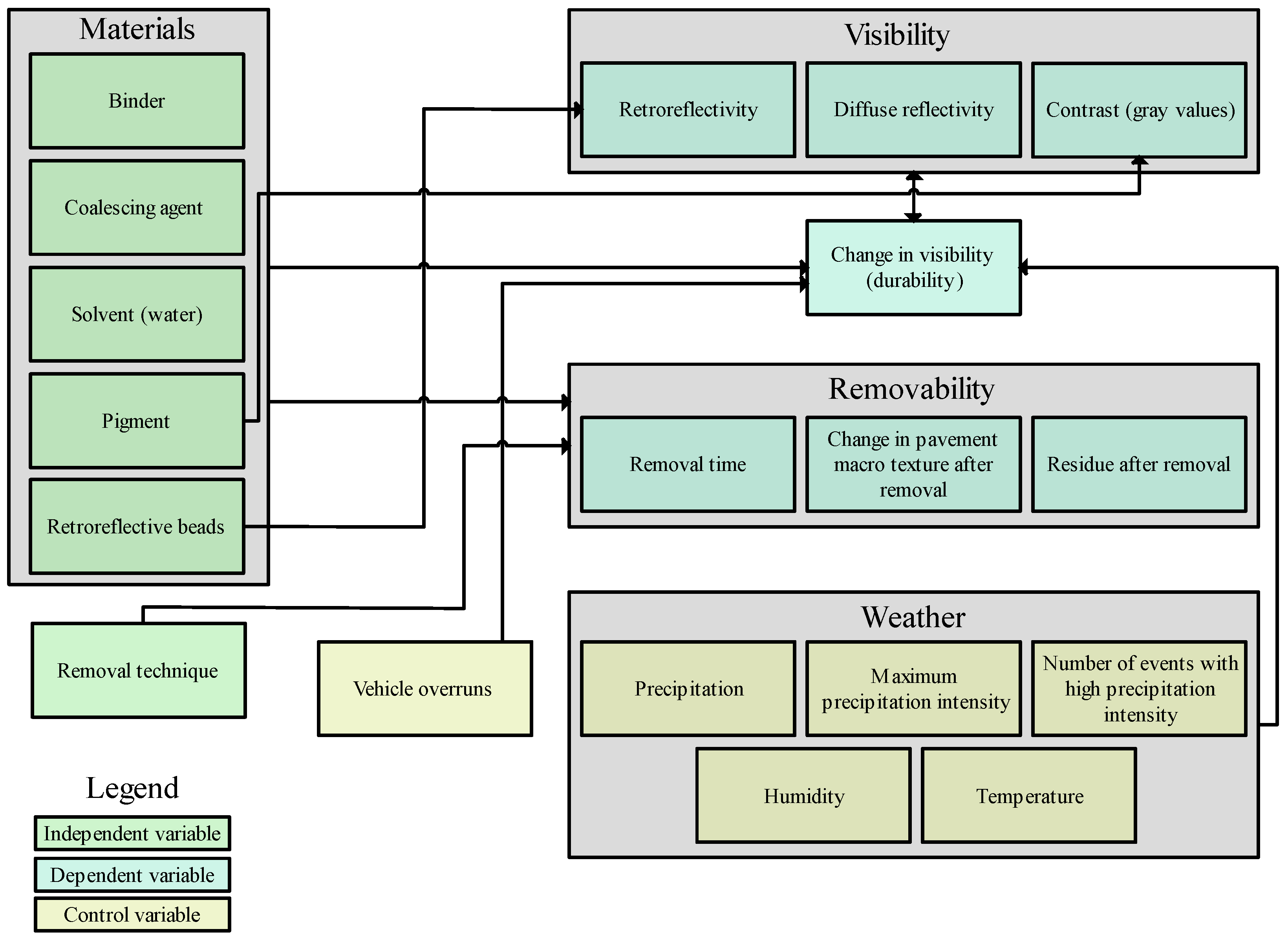
Figure A2 presents the possible correlations between the variables relevant to the validation of the effectiveness of temporary road marking paint for tests of automated driving systems on proving grounds. These correlations could be investigated in a follow-up study under reproducible conditions.
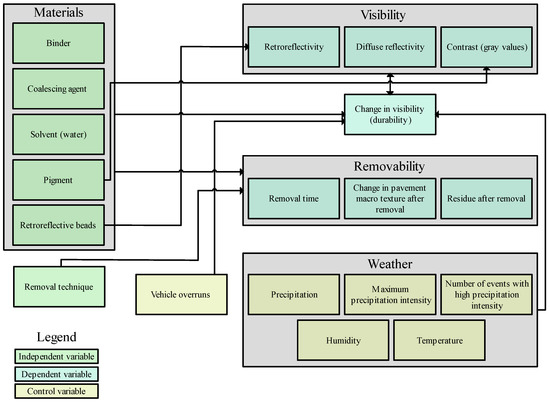
Figure A2.
Research model for follow-up study.
Figure A2.
Research model for follow-up study.
References
- Introducing DRIVE PILOT: An Automated Driving System for the Highway. Available online: https://group.mercedes-benz.com/dokumente/innovation/sonstiges/2023-03-06-vssa-mercedes-benz-drive-pilot.pdf (accessed on 22 June 2024).
- Schäfer, P. Automated Driving at Level 3 in the BMW 7 Series. Available online: https://www.springerprofessional.de/automated-driving/sedans/automated-driving-at-level-3-in-the-bmw-7-series/26523234 (accessed on 3 August 2024).
- Aly, M. Real Time Detection of Lane Markers in Urban Streets. In Proceedings of the IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 7–12. [Google Scholar] [CrossRef]
- Nalic, D.; Mihalj, T.; Bäumler, M.; Lehmann, M.; Eichberger, A.; Bernsteiner, S. Scenario Based Testing of Automated Driving Systems: A Literature Survey. In Proceedings of the FISITA Web Congress 2020, Virtual Event, 24 November 2020. [Google Scholar]
- Testbeds Worldwide. Available online: https://iamts.org/en/testbeds (accessed on 22 June 2024).
- Katzorke, N.; Kastner, S.; Kolar, P.; Lasi, H. Agile Altering of Road Marking Patterns for Lane Detection Testing. IEEE Trans. Intell. Transp. Syst. 2022, 23, 21996–22001. [Google Scholar] [CrossRef]
- Drewes, C.; John, D.; Meseberg, H.-H. ZTV M 13 Handbuch und Kommentar für Markierungen auf Straßen, 1st ed.; Kirschbaum Verlag: Bonn, Germany, 2015. [Google Scholar]
- U.S. Department of Transportation, Federal Highway Administration. A Manual on Uniform Traffic Control Devices for Streets and Highways 2009 Edition; Department of Transportation, Federal Highway Administration: Washington, DC, USA, 2022. Available online: https://mutcd.fhwa.dot.gov/pdfs/2009r1r2r3/mutcd2009r1r2r3edition.pdf (accessed on 22 June 2024).
- GB/T 16311-2009; Specification and Test Method for Road Traffic Markings (English Translation). General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China the Standardization Administration of the People’s Republic of China: Beijing, China, 2009.
- TD 26/17; Inspection and Maintenance of Road Markings and Road Studs on Motorways and All-Purpose Trunk Roads. Highways England; Transport Scotland; Llywodraeth Cymru Welsh Government; Department for Infrastructure Northern Ireland; RSMA: Gainsborough, UK, 2017. Available online: https://rsma.co.uk/wp-content/uploads/2018/12/DESIGN-MANUAL-FOR-ROADS-AND-BRIDGES.pdf (accessed on 22 June 2024).
- Katzorke, N. Using RTK-Based Automated Vehicles to Pre-Mark Temporary Road Marking Patterns for Test Maneuvers of Automated Vehicles. In Proceedings of the International Conference on Connected Vehicles and Expo (ICCVE), Lakeland, FL, USA, 7–9 March 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Babić, D.; Fiolić, M.; Babić, D.; Gates, T. Road Markings and Their Impact on Driver Behaviour and Road Safety: A Systematic Review of Current Findings. J. Adv. Transp. 2020, 1, 7843743. [Google Scholar] [CrossRef]
- Hoang, T.M.; Nam, S.H.; Park, K.R. Enhanced Detection and Recognition of Road Markings Based on Adaptive Region of Interest and Deep Learning. IEEE Access 2019, 7, 109817–109832. [Google Scholar] [CrossRef]
- Hu, J.; Abubakar, S.; Liu, S.; Dai, X.; Yang, G.; Sha, H. Near-Infrared Road-Marking Detection Based on a Modified Faster Regional Convolutional Neural Network. J. Sens. 2019, 1, 7174602. [Google Scholar] [CrossRef]
- Ye, X.-Y.; Hong, D.-S.; Chen, H.-H.; Hsiao, P.-Y.; Fu, L.-C. A Two-Stage Real-Time YOLOv2-Based Road Marking Detector with Lightweight Spatial Transformation-Invariant Classification. Image Vis. Comput. 2020, 102, 103978. [Google Scholar] [CrossRef]
- Mousavi, S.M.; Osman, O.A.; Lord, D.; Dixon, K.K.; Dadashova, B. Investigating the Safety and Operational Benefits of Mixed Traffic Environments with Different Automated Vehicle Market Penetration Rates in the Proximity of a Driveway on an Urban Arterial. Accid. Anal. Prev. 2021, 152, 105982. [Google Scholar] [CrossRef] [PubMed]
- Burghardt, T.E.; Mosböck, H.; Pashkevich, A.; Fiolić, M. Horizontal Road Markings for Human and Machine Vision. Transp. Res. Procedia 2020, 48, 3622–3633. [Google Scholar] [CrossRef]
- Burghardt, T.E.; Popp, R.; Helmreich, B.; Reiter, T.; Böhm, G.; Pitterle, G.; Artmann, M. Visibility of Various Road Markings for Machine Vision. Case Stud. Constr. Mater. 2021, 15, e00579. [Google Scholar] [CrossRef]
- Xu, S.; Wang, J.; Wu, P.; Shou, W.; Wang, X.; Chen, M. Vision-Based Pavement Marking Detection and Condition Assessment—A Case Study. Appl. Sci. 2021, 11, 3152. [Google Scholar] [CrossRef]
- Gibbons, R.B.; Hankey, J. Wet Night Visibility of Pavement Markings: Dynamic Experiment. Transp. Res. Rec. J. Transp. Res. Board 2007, 2015, 73–80. [Google Scholar] [CrossRef]
- Babić, D.; Babić, D.; Fiolic, M.; Ferko, M. Road Markings and Signs in Road Safety. Encyclopedia 2022, 2, 1738–1752. [Google Scholar] [CrossRef]
- Katzorke, N. Prüfung und Entwicklung der Markierungserkennung durch Fahrerassistenzsysteme und automatisierte Fahrzeuge. In Proceedings of the BASt Symposium Straßenausstattung, Bergisch Gladbach, Germany, 30 January 2020. [Google Scholar] [CrossRef]
- Wenzel, K.M.; Burghardt, T.E.; Pashkevich, A.; Buckermann, W.A. Glass Beads for Road Markings: Surface Damage and Retroreflection Decay Study. Appl. Sci. 2022, 12, 2258. [Google Scholar] [CrossRef]
- Burghardt, T.; Ettinger, K.; Köck, B.; Hauzenberger, C. Glass Beads for Road Markings and Other Industrial Usage: Crystallinity and Hazardous Elements. Case Stud. Constr. Mater. 2022, 17, e01213. [Google Scholar] [CrossRef]
- Kemper, D.; Schacht, A.; Klaproth, C.; Oeser, M. Beanspruchung und Entfernbarkeit temporärer Fahrbahnmarkierungen. Berichte Der Bundesanst. Für Straßenwesen 2016, 94, 1–67. Available online: https://www.bast.de/DE/Publikationen/Berichte/unterreihe-s/2017-2016/s094.html?nn=1836812 (accessed on 22 June 2024).
- Messant, G.; Ortais, Y. Peinture, not Amment Pour Marquage Routier Temporaire, A Base de Polymeres Biodegradables. International Patent WO 2013/054040 A2, 10 October 2012. [Google Scholar]
- Cho, Y.; Kabassi, K.; Pyeon, J.H.; Choi, K.; Wang, C.; Norton, T. Effectiveness Study of Methods for Removing Temporary Pavement Markings in Roadway Construction Zones. J. Constr. Eng. Manag. 2013, 139, 257–266. [Google Scholar] [CrossRef]
- Temporary Road Markings are Now Available! Available online: https://www.triwo-testcenter.de/en/temporaere-fahrbahnmarkierungen-ab-sofort-erhaeltlich/ (accessed on 22 June 2024).
- New Cooperation Partner in Automated Driving. Available online: https://www.swarco.com/solutions/road-marking-systems/autonomous-driving/digitrans (accessed on 22 June 2024).
- EN 1436:2018; Road Marking Materials—Road Marking Performance for Road Users and Test Methods. Comité Européen de Normalisation: Brussels, Belgium, 2018. [CrossRef]
- German Federal Environmental Agency. Verordnung über Anlagen Zum Umgang mit Wassergefährdenden Stoffen (AwSV); German Federal Environmental Agency: Bonn, Germany, 2017; Available online: https://www.umweltbundesamt.de/wgk-einstufung (accessed on 22 June 2024).
- Ellis, R.; Ruth, B.; Carola, P. Development of Improved Procedures for the Removal of Pavement Markings During FDOT Construction Projects; Florida Department of Transportation: Tallahassee, FL, USA, 1999. [Google Scholar]
- High-Pressure Water Systems. Available online: https://traffic-lines.de/en/high-pressure-water-systems/ (accessed on 22 June 2024).
- Katzorke, N. Verfahren Zur Physischen Simulation Von Geschädigten Fahrbahnmarkierungen Und/Oder Rückständen Entfernter Fahrbahnmarkierungen. German Patent DE 10 2023 000 230.5 A1, 27 January 2023. [Google Scholar]
- Zedler, M. Turntable Road-Marking Test System (RPA). Available online: https://www.bast.de/EN/Traffic_Engineering/Technology/RPA.html (accessed on 3 August 2024).
- Tine, D.; Joffrey, G.; Valérie, M.; Nuyttens, R.; Ritter, J.; Sorensen, K.; Huanyu, Z. Synthesis of Bibliographic Analysis of WG2 Project RMCAD (Road Marking for Connected Automated Driving). Task Group 100. CEN. 2023. Available online: https://hal.science/hal-04576528 (accessed on 22 June 2024).
- Yan, L.; Liu, H.; Tan, J.; Li, Z.; Xie, H.; Chen, C. Scan Line Based Road Marking Extraction from Mobile LiDAR Point Clouds. Sensors 2016, 16, 903. [Google Scholar] [CrossRef] [PubMed]
- Bengler, K.; Dietmayer, K.; Färber, B.; Maurer, M.; Stiller, C.; Winner, H. Three decades of driver assistance systems: Review and future perspectives. IEEE Intell. Transp. Syst. Mag. 2014, 6, 6–22. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).