


CNN-Based Damage Identification of Submerged Structure-Foundation System Using Vibration Data

Abstract
1. Introduction
- A CNN deep learning approach is developed to identify damage in submerged structure-foundation systems using both time-history and SVD data.
- The performance of the CNN model is evaluated with partially untrained cases, where certain damage levels were excluded from the training and validation datasets.
- A comparative study between CNN trained using time-history and SVD data is conducted. The results from the two models are integrated to strengthen the damage classification performance.
2. Literature Reviews
2.1. Vibration-Based Techniques for Caisson-Foundation Systems
2.2. 1-D CNN Deep Learning and Data Acquisition
3. Methodology
3.1. Research Framework
3.2. Vibration-Data Acquisition Technique
3.2.1. Vibration Monitoring Method
3.2.2. Vibration Feature Extraction
3.3. Architecture of a 1-D CNN Model
3.4. Foundation-Damage Classification Approach
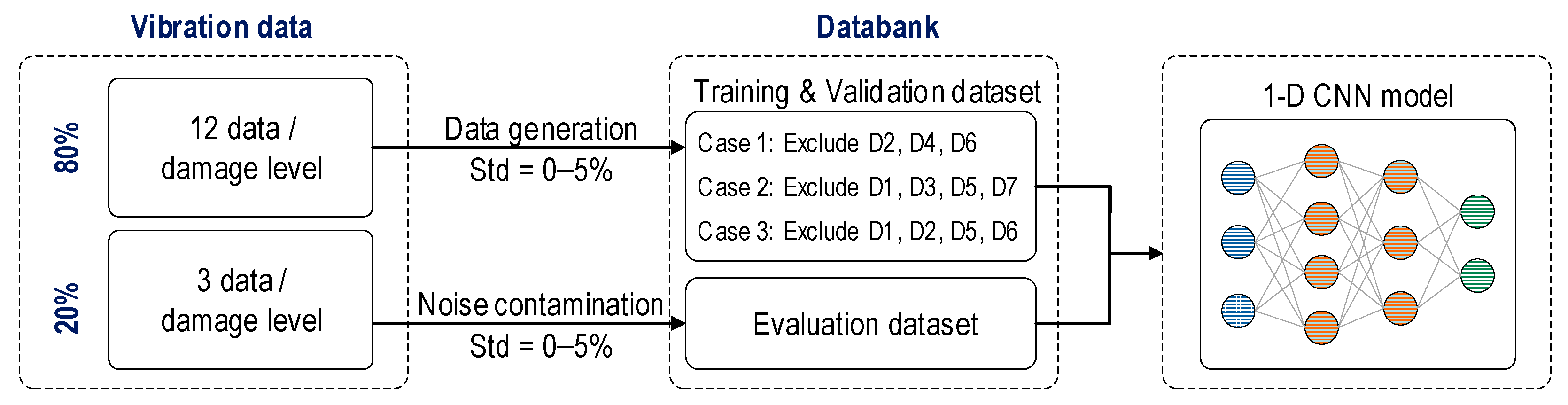
3.4.1. Deep Learning of Noise-Contaminated Databank
3.4.2. Deep Learning of Partially Untrained Databanks
4. Experiment on a Lab-Scale Caisson-Foundation System
4.1. Vibration Test on a Lab-Scale Caisson System
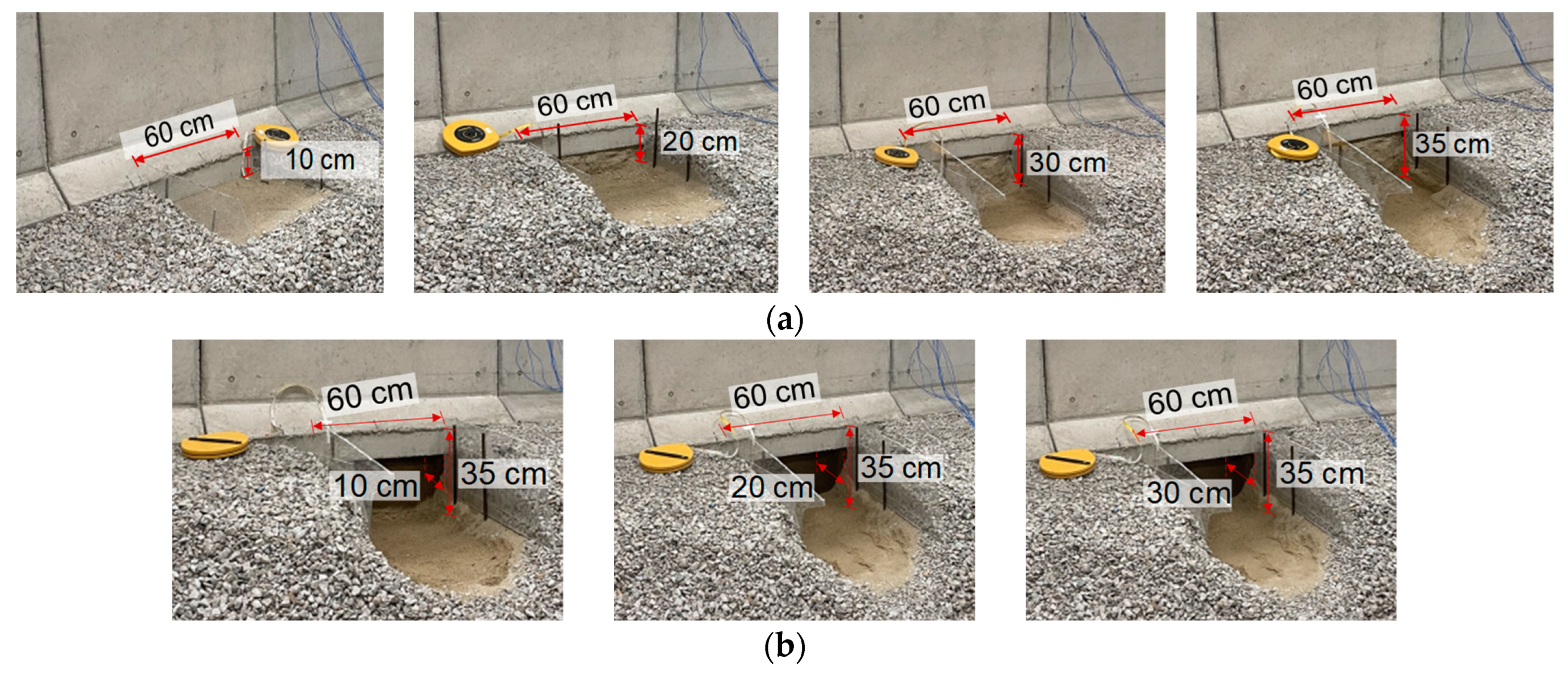
4.2. Foundation-Damage Scenarios
4.3. Vibration Data Acquired from Accelerometers
5. Development of 1-D CNN Models
5.1. 1-D CNN Model Using Time-History Response
5.1.1. Databank of Time-History Responses
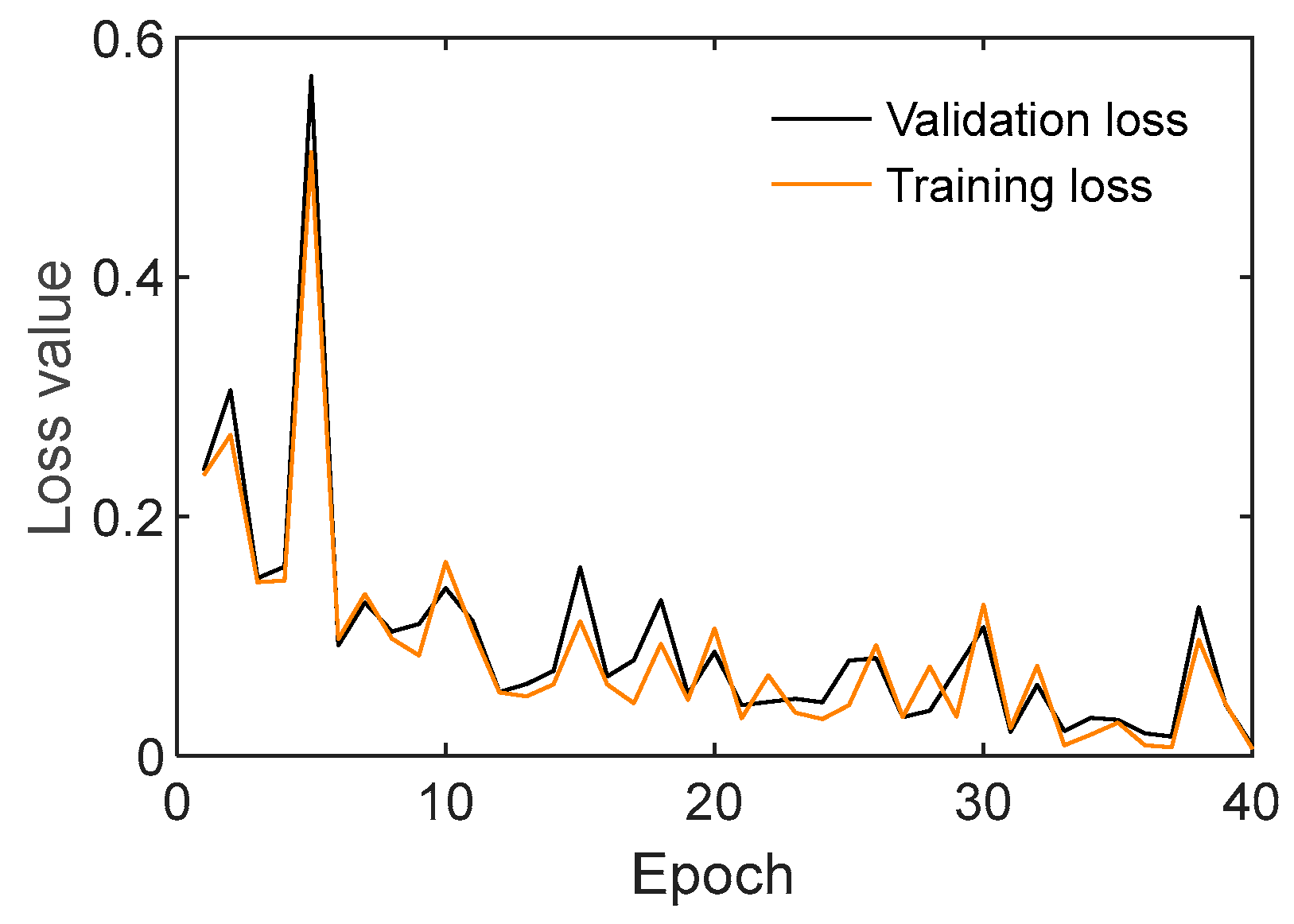
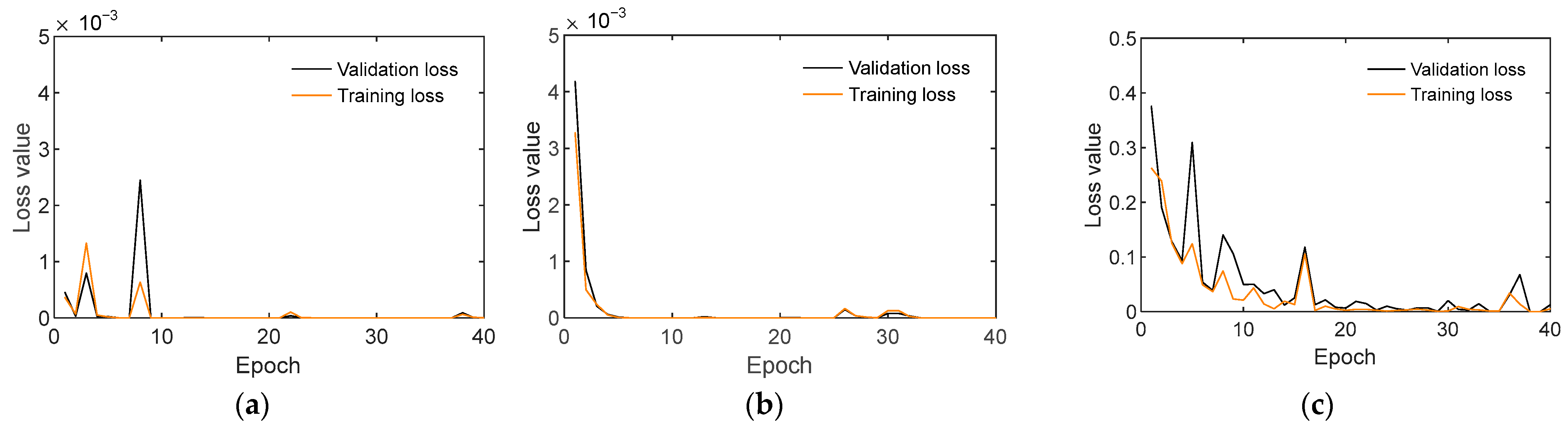
5.1.2. Training Procedures of Time-History Responses
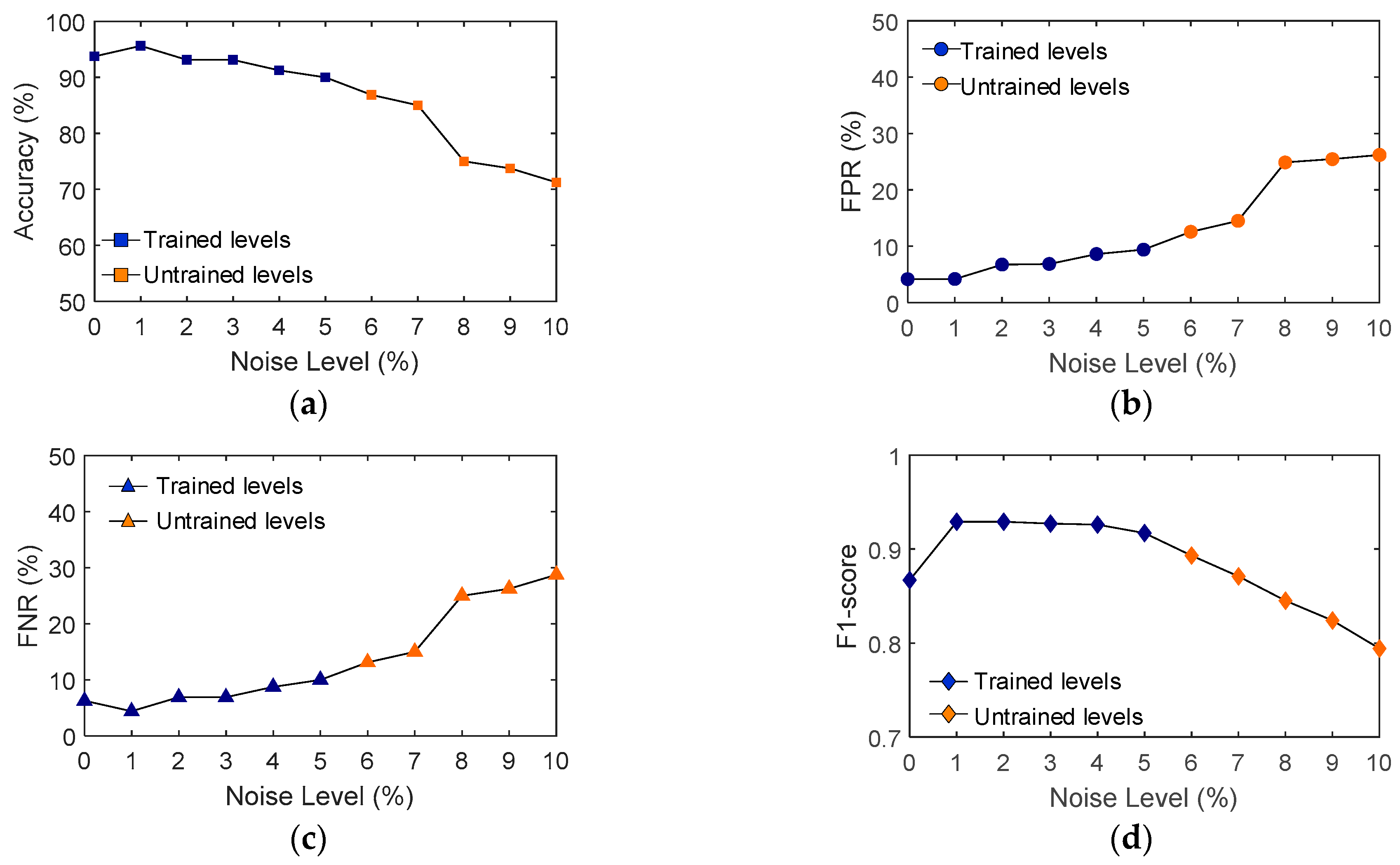
5.1.3. Evaluation of 1-D CNN Model Using Time-History Responses
5.2. 1-D CNN Model Using SVD Responses
5.2.1. Databank of SVD Responses
5.2.2. Training Procedures of SVD Responses
5.2.3. Evaluation of the 1-D CNN Model Using SVD Responses
6. Evaluation of 1-D CNN Models for Untrained Damage Cases
6.1. Damage Classification by 1-D CNN Model Using Time-History Responses
6.2. Damage Classification by 1-D CNN Models Using SVD Responses
6.3. Discussion on Damage Classification Results
7. Conclusions
- (1)
- The CNN deep learning model trained using time-history and SVD responses successfully classified the foundation damage of the caisson system.
- (2)
- The t-test evaluation on performance metrics indicated that the CNN model trained using SVD responses outperformed the CNN model trained using time-history responses, particularly when dealing with untrained noise levels. The findings underscore the effectiveness of using additional vibration features such as SVD data.
- (3)
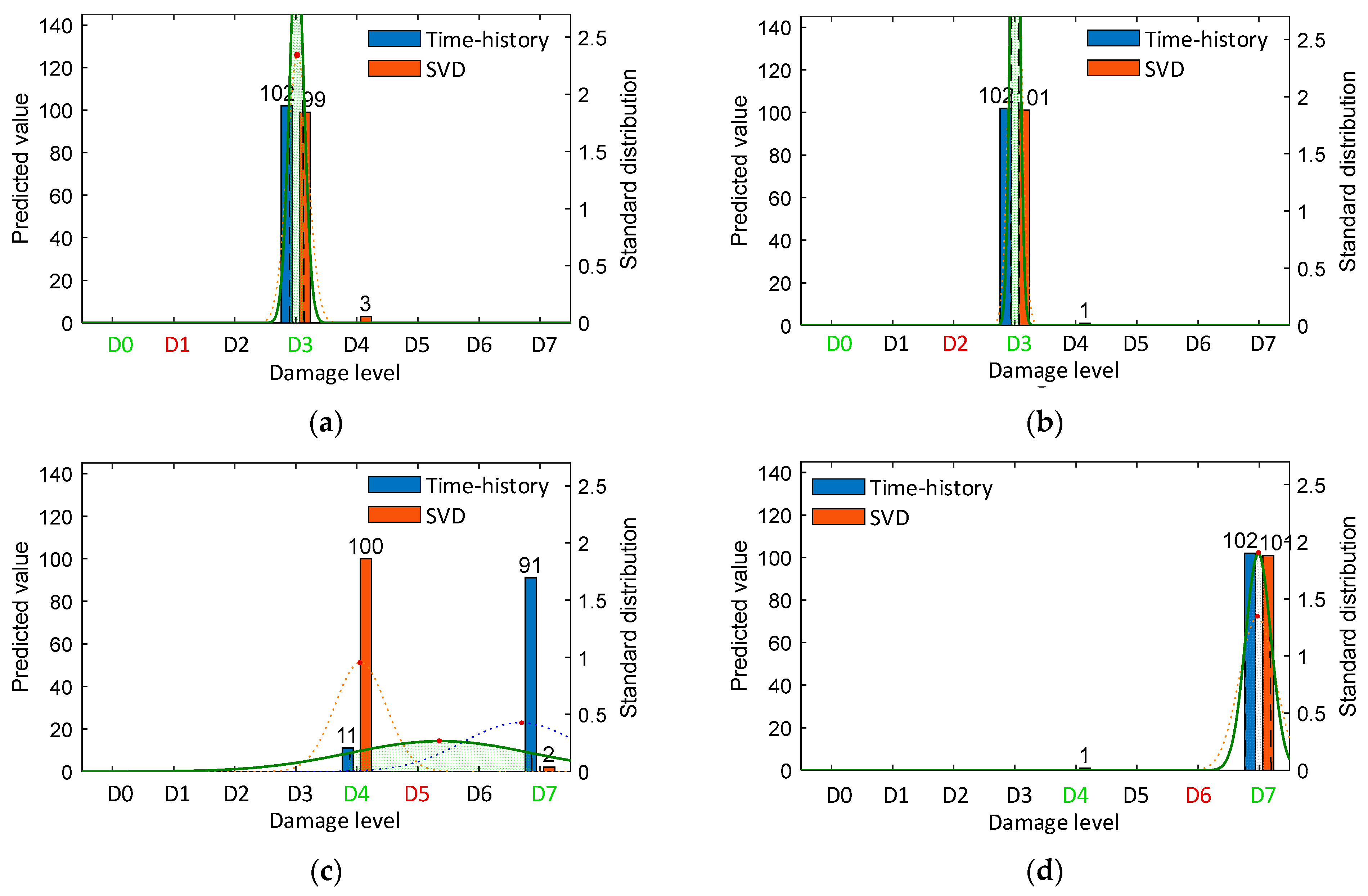
- The performance of the CNN model was maintained with partially untrained cases. The CNN models trained using time-history and SVD responses successfully classified the untrained damage levels as the most similar trained damage levels. This outcome demonstrates the robustness and potential effectiveness of the CNN model under in situ conditions.
- (4)
- Integrating the time-history and SVD responses strengthened the damage classification results and provided additional insights for investigators.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Brunn, P. Port structures, wharves, quays, terminals, and mooring devices. J. Coast. Res. 2005, SI, 139–158. [Google Scholar]
- Matsui, T.; Oda, K. Foundation damage of structures. Soils Found. 1996, 36, 189–200. [Google Scholar] [CrossRef] [PubMed]
- Oumeraci, H.; Kortenhaus, A. Analysis of the dynamic response of caisson breakwaters. Coast. Eng. 1994, 22, 159–183. [Google Scholar] [CrossRef]
- Yu, C. Numerical simulation of pounding damage to caisson under storm surge. E3S Web Conf. 2018, 38, 03046. [Google Scholar] [CrossRef]
- Catbas, F.N.; Ciloglu, S.K.; Hasancebi, O.; Grimmelsman, K.; Aktan, A.E. Limitations in structural identification of large constructed structures. J. Struct. Eng. 2007, 133, 1051–1066. [Google Scholar] [CrossRef]
- Ho, D.D.; Kim, J.T.; Stubbs, N.; Park, W.S. Prestress-force estimation in PSC girder using modal parameters and system identification. Adv. Struct. Eng. 2012, 15, 997–1012. [Google Scholar] [CrossRef]
- Li, H.N.; Yi, T.H.; Ren, L.; Li, D.S.; Huo, L.S. Reviews on innovations and applications in structural health monitoring for infrastructures. Struct. Monit. Maint. 2014, 1, 1. [Google Scholar] [CrossRef]
- Lee, S.Y.; Nguyen, K.D.; Huynh, T.C.; Kim, J.T.; Yi, J.H.; Han, S.H. Vibration-based damage monitoring of harbor caisson structure with damaged foundation-structure interface. Smart Struct. Syst. 2012, 10, 517–546. [Google Scholar] [CrossRef]
- Huynh, T.C.; Lee, S.Y.; Kim, J.T.; Park, W.S.; Han, S.H. Simplified planar model for damage estimation of interlocked caisson system. Smart Struct. Syst. 2013, 12, 441–463. [Google Scholar] [CrossRef]
- Huynh, T.C.; Lee, S.Y.; Dang, N.L.; Kim, J.T. Vibration-based structural identification of caisson-foundation system via in situ measurement and simplified model. Struct. Control Health Monit. 2019, 26, e2315. [Google Scholar] [CrossRef]
- Lee, S.Y.; Huynh, T.C.; Kim, J.T. A practical scheme of vibration monitoring and modal analysis for caisson breakwater. Coast. Eng. 2018, 137, 103–119. [Google Scholar] [CrossRef]
- Lee, S.Y.; Huynh, T.C.; Dang, N.L.; Kim, J.T. Vibration characteristics of caisson breakwater for various waves, sea levels, and foundations. Smart Struct. Syst. 2019, 24, 525–539. [Google Scholar]
- Pham, N.L.; Ta, Q.B.; Kim, J.T. Pseudo-Damage Simulation and CNN Deep Learning for Damage Identification of Submerged Structure-Foundation System. Struct. Health Monit. 2024; under review. [Google Scholar]
- Teng, S.; Chen, G.; Yan, Z.; Cheng, L.; Bassir, D. Vibration-based structural damage detection using 1-D convolutional neural network and transfer learning. Struct. Health Monit. 2023, 22, 2888–2909. [Google Scholar] [CrossRef]
- Huang, J.; Yin, X.; Kaewunruen, S. Quantification of dynamic track stiffness using machine learning. IEEE Access 2022, 10, 78747–78753. [Google Scholar] [CrossRef]
- Li, F.; Wang, L.; Wang, D.; Wu, J.; Zhao, H. An adaptive multiscale fully convolutional network for bearing fault diagnosis under noisy environments. Measurement 2023, 216, 112993. [Google Scholar] [CrossRef]
- Ming, G.; Guanying, D.; Jihua, Y. Dynamic studies on caisson-type breakwaters. Coast. Eng. 1988, 2469–2478. [Google Scholar] [CrossRef]
- Khodabandehlou, H.; Pekcan, G.; Fadali, M.S. Vibration-based structural condition assessment using convolution neural networks. Struct. Control Health Monit. 2019, 26, e2308. [Google Scholar] [CrossRef]
- Lin, Y.Z.; Nie, Z.H.; Ma, H.W. Structural damage detection with automatic feature-extraction through deep learning. Comput.-Aided Civ. Infrastruct. Eng. 2017, 32, 1025–1046. [Google Scholar] [CrossRef]
- Brincker, R.; Zhang, L.; Andersen, P. Modal identification of output-only systems using frequency domain decomposition. Smart Mater. Struct. 2001, 10, 441. [Google Scholar] [CrossRef]
- Yi, J.H.; Yun, C.B. Comparative study on modal identification methods using output-only information. Struct. Eng. Mech. Int. J. 2004, 17, 445–466. [Google Scholar] [CrossRef]
- Ewins, D.J. Modal Testing: Theory, Practice and Application; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Sarawgi, Y.; Somani, S.; Chhabra, A.; Sangwan, D. Nonparametric vibration-based damage detection technique for structural health monitoring using 1D CNN. In Proceedings of the Computer Vision and Image Processing: 4th International Conference, Jaipur, India, 27–29 September 2019. [Google Scholar]
- Pearson, K. Contributions to the mathematical theory of evolution. Philos. Trans. R. Soc. London 1894, 185, 71–110. [Google Scholar]
- Loeve, M.M. Probability Theory, 2nd ed.; Springer: New York, NY, USA, 1960. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Type | Depth | Filter | Stride | No. | Type | Depth | Filter | Stride |
|---|---|---|---|---|---|---|---|---|---|
| 1 | Conv1 | 6 | 1 × 4 | 1 | 8 | ReLU | - | - | - |
| 2 | ReLU | - | - | - | 9 | Maxpool3 | - | 1 × 2 | 2 |
| 3 | Maxpool1 | - | 1 × 2 | 2 | 10 | Flatten | |||
| 4 | Conv2 | 4 | 1 × 4 | 1 | 11 | Fc1 | 48 | - | - |
| 5 | ReLU | - | - | - | 12 | Fc2 | 16 | - | - |
| 6 | Maxpool2 | - | 1 × 2 | 2 | 13 | Fc3 | 4 | - | - |
| 7 | Conv3 | 5 | 1 × 8 | 1 | 14 | Classification | - | - | - |
| Case | Gravel Removed (% of Gravel Armor) | Sand Removed (% of Sand Mound) | Descriptions |
|---|---|---|---|
| D0 | - | - | Undamaged intact state |
| D1 | 0.37 kN (2.3%) | - | Damage in front slope |
| D2 | 0.46 kN (2.8%) | 0.44 kN (0.7%) | |
| D3 | 0.56 kN (3.4%) | 0.91 kN (1.5%) | |
| D4 | 0.58 kN (3.6%) | 1.14 kN (1.9%) | |
| D5 | 0.58 kN (3.6%) | 1.35 kN (2.2%) | Damage expanded to foundation–caisson interface |
| D6 | 0.58 kN (3.6%) | 1.56 kN (2.5%) | |
| D7 | 0.58 kN (3.6%) | 1.77 kN (2.9%) |
| Case | Scenario | Data Type | |
|---|---|---|---|
| Training & Validation Datasets | Evaluation Dataset | ||
| 1 | Excluding damage levels D2, D4, and D6 | 3060 | 1224 |
| 2 | Excluding damage levels D1, D3, D5, and D7 | 2448 | |
| 3 | Excluding damage levels D1, D2, D5, and D6 | 2448 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pham, N.-L.; Ta, Q.-B.; Kim, J.-T. CNN-Based Damage Identification of Submerged Structure-Foundation System Using Vibration Data. Appl. Sci. 2024, 14, 7508. https://doi.org/10.3390/app14177508
Pham N-L, Ta Q-B, Kim J-T. CNN-Based Damage Identification of Submerged Structure-Foundation System Using Vibration Data. Applied Sciences. 2024; 14(17):7508. https://doi.org/10.3390/app14177508
Chicago/Turabian StylePham, Ngoc-Lan, Quoc-Bao Ta, and Jeong-Tae Kim. 2024. "CNN-Based Damage Identification of Submerged Structure-Foundation System Using Vibration Data" Applied Sciences 14, no. 17: 7508. https://doi.org/10.3390/app14177508
APA StylePham, N.-L., Ta, Q.-B., & Kim, J.-T. (2024). CNN-Based Damage Identification of Submerged Structure-Foundation System Using Vibration Data. Applied Sciences, 14(17), 7508. https://doi.org/10.3390/app14177508