
Research on the Design of Multi-Rope Friction Hoisting System of Vertical Shaft Gravity Energy Storage System
Abstract
:1. Introduction
2. Design Theory of Multi-Rope Friction Hoisting System with Double Cages in Vertical Shaft
2.1. Calculation Theory and Selection of the Structural Parameters of the Hoisting System
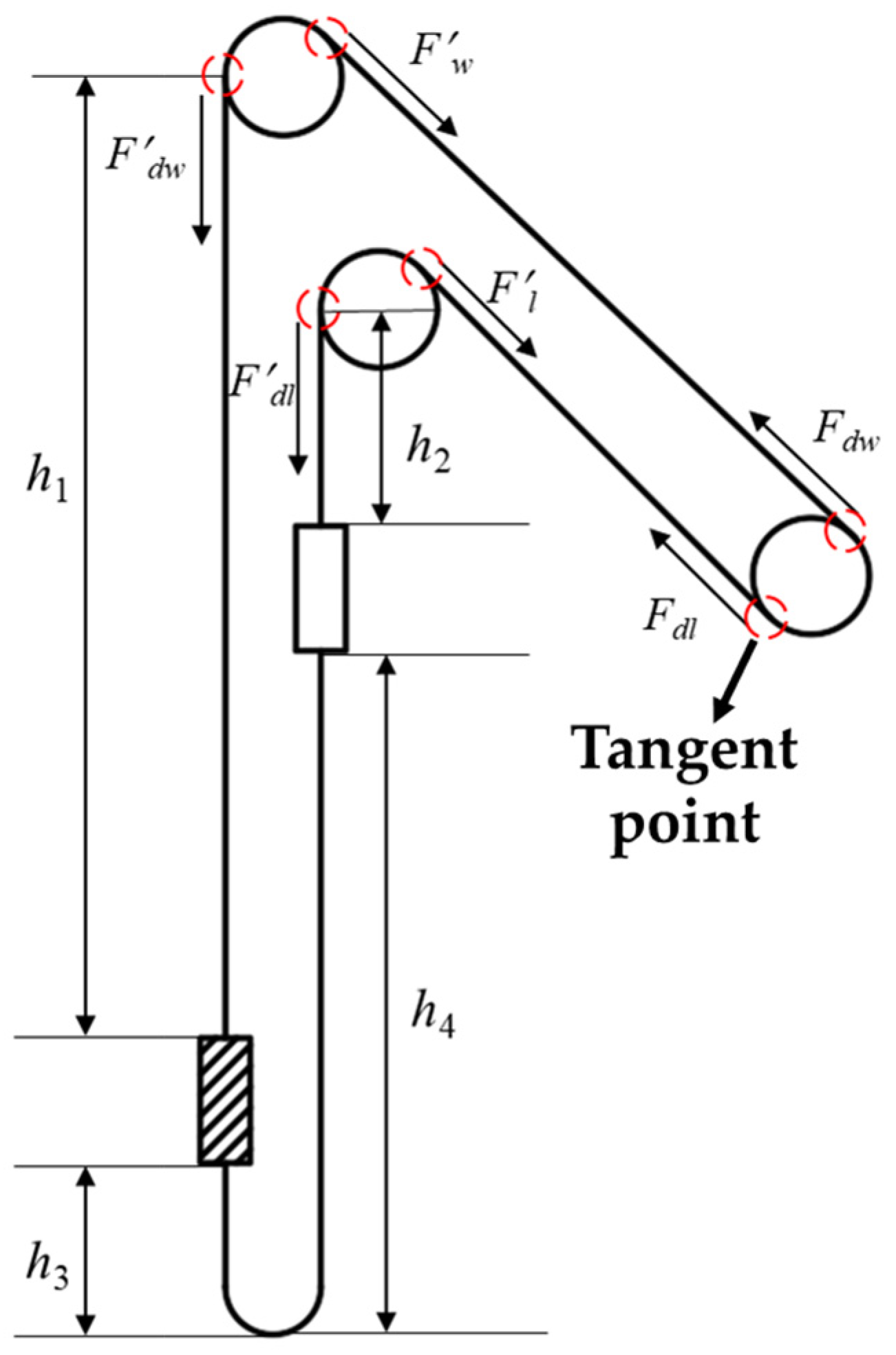
2.1.1. Calculation of Chord Length and Elevation Angle of Upper and Lower Ropes
2.1.2. Calculation of Parameters of Friction Wheel
2.2. Calculation Theory and Selection of Hoisting Rope and Tail Rope
2.2.1. Initial Overhang Height of Hoisting Rope and Tail Rope
2.2.2. Approximate Unit Weight and Minimum Breaking Force of Hoisting Rope
2.2.3. Minimum Nominal Diameter of Hoisting Wire Rope
2.2.4. Safety Coefficient of Hoisting Wire Rope
2.2.5. Type Selection of Hoisting Wire Rope
2.2.6. Type Selection of Balance Tail Rope
2.3. Static Calculation Theory of Hoisting System
2.3.1. Static Tension Calculation of Hoisting Wire Rope
2.3.2. Calculation of the Static Anti-Slip Safety Coefficient between Hoisting Rope and Friction Lining
2.3.3. Calculation of Contact Pressure between Hoisting Rope and Friction Lining
2.4. Dynamic Calculation Theory of Hoisting System
2.4.1. Equivalent Mass of the Hoisting System
2.4.2. Limiting Acceleration/Deceleration
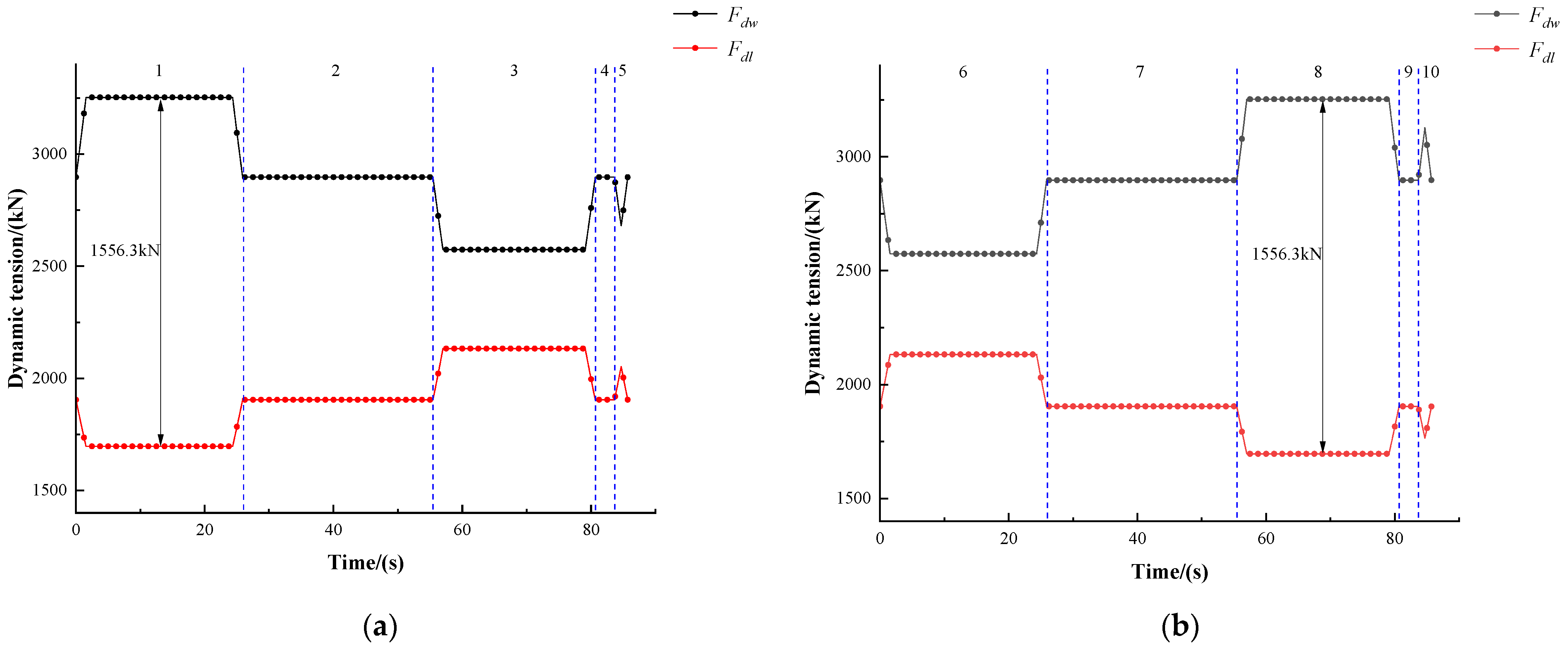
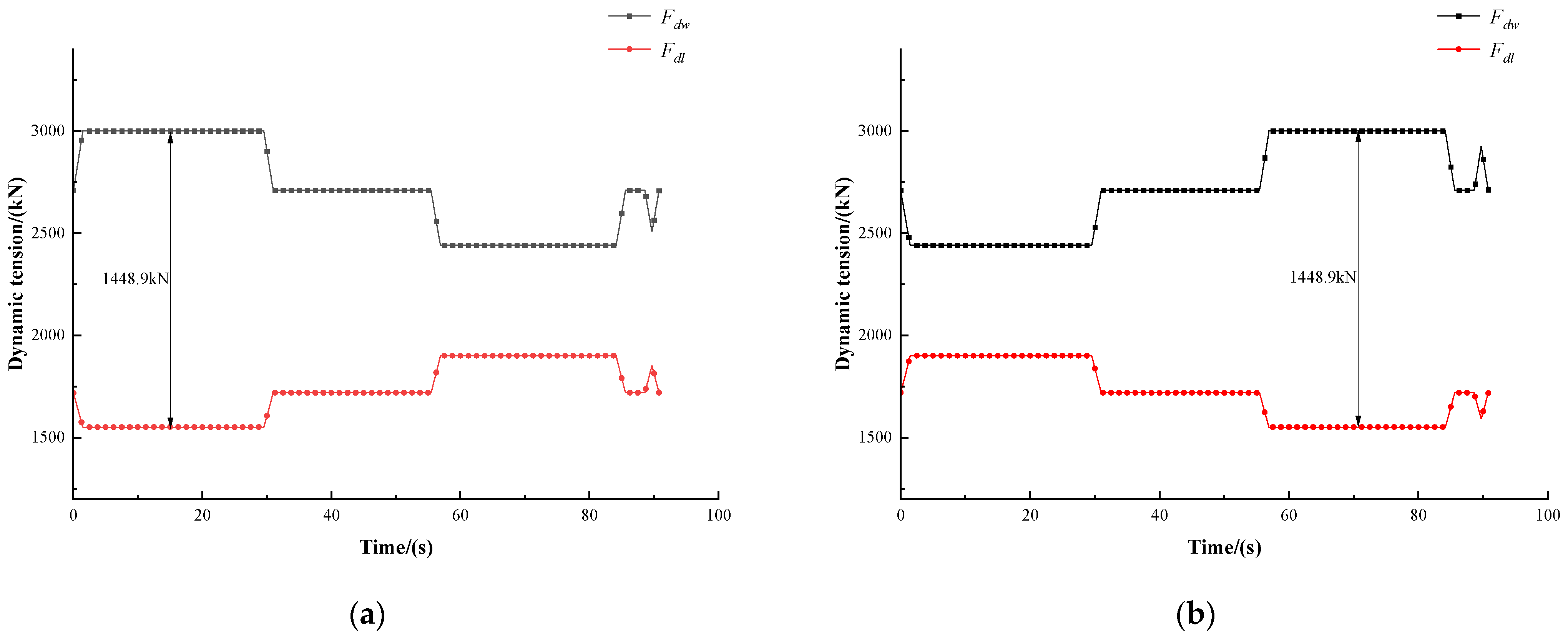
2.4.3. Dynamic Tension of the Hoisting Rope
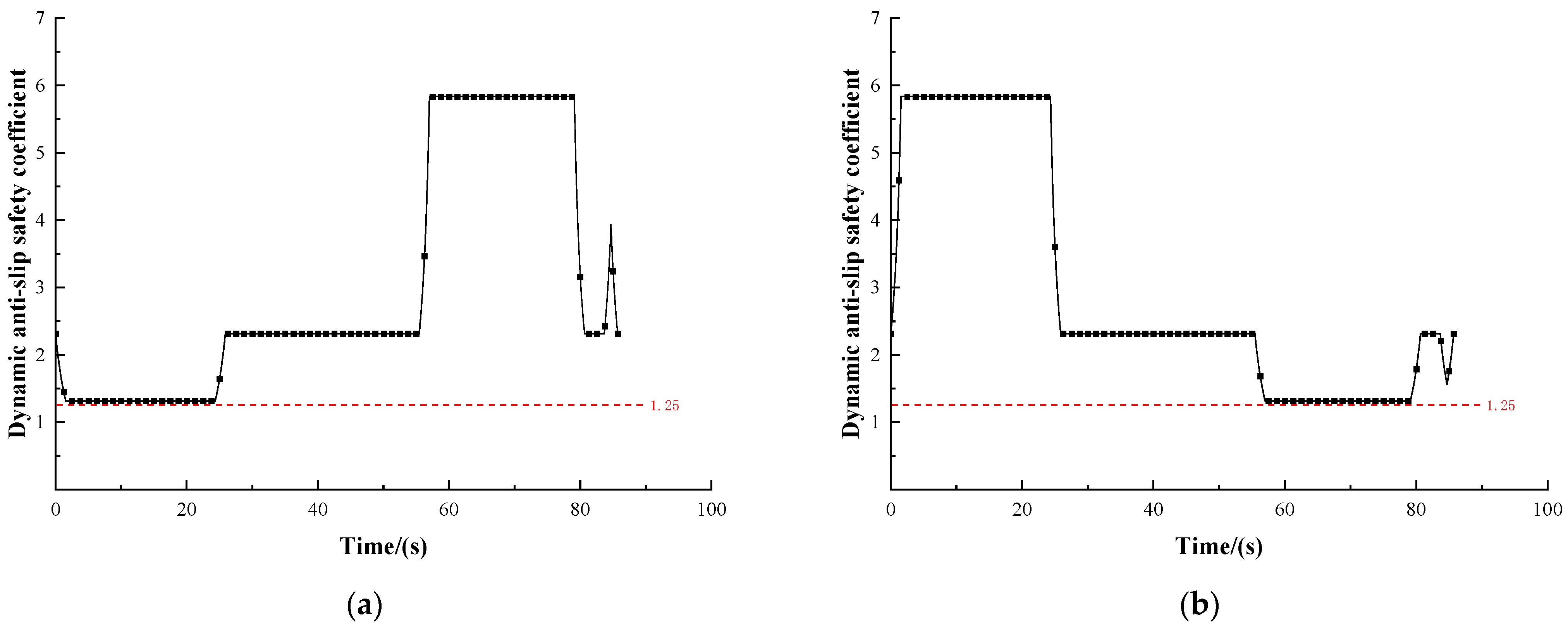
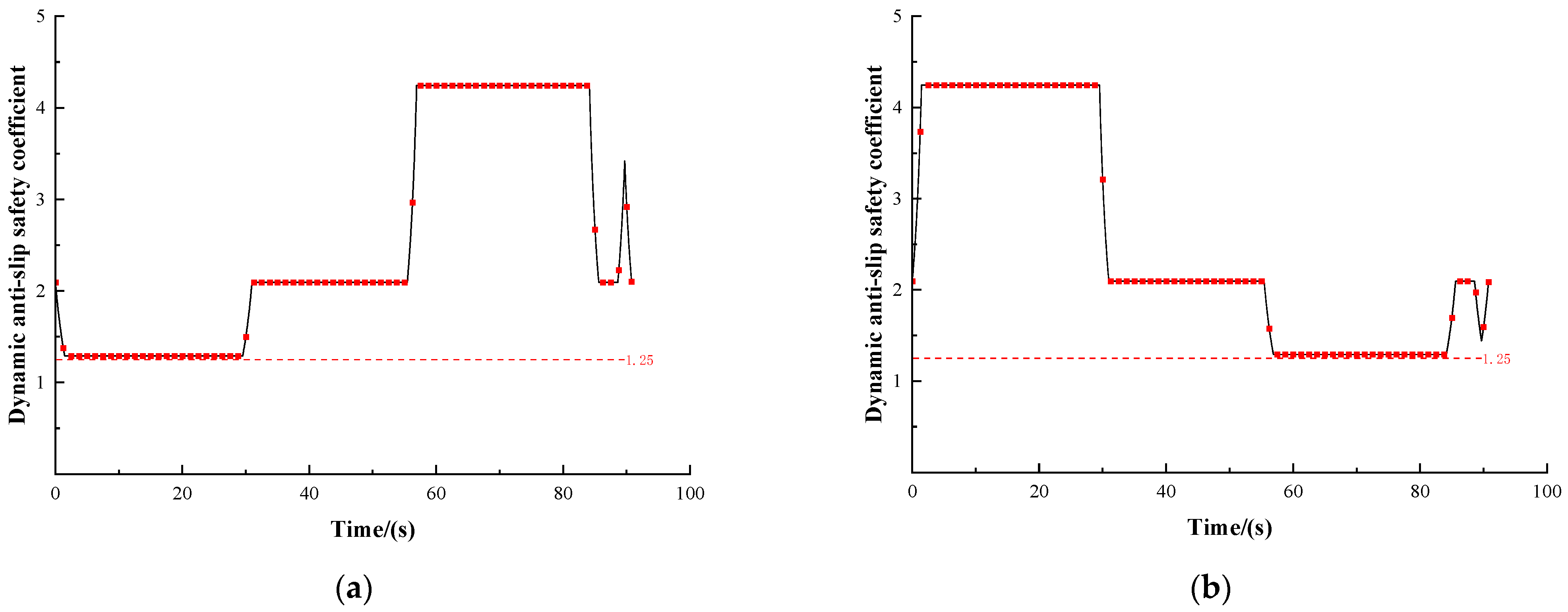
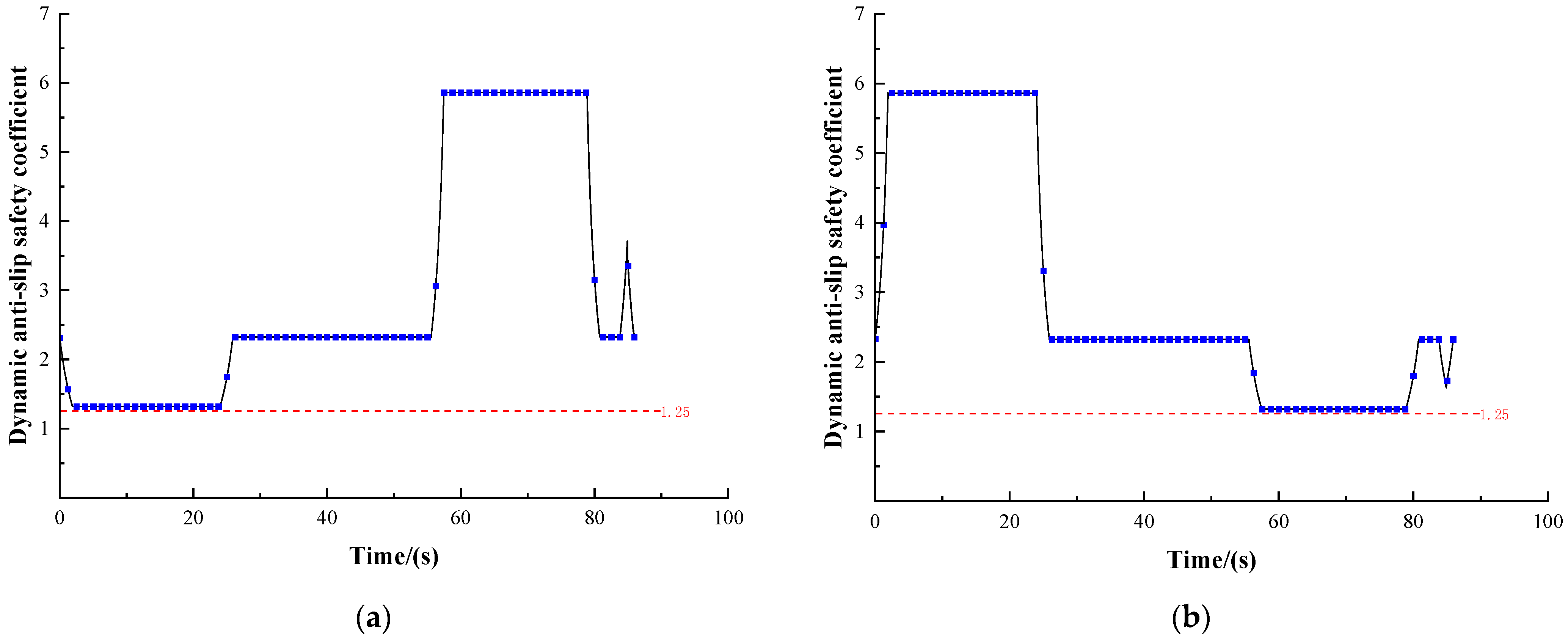
2.4.4. Dynamic Anti-Slip Safety Coefficient
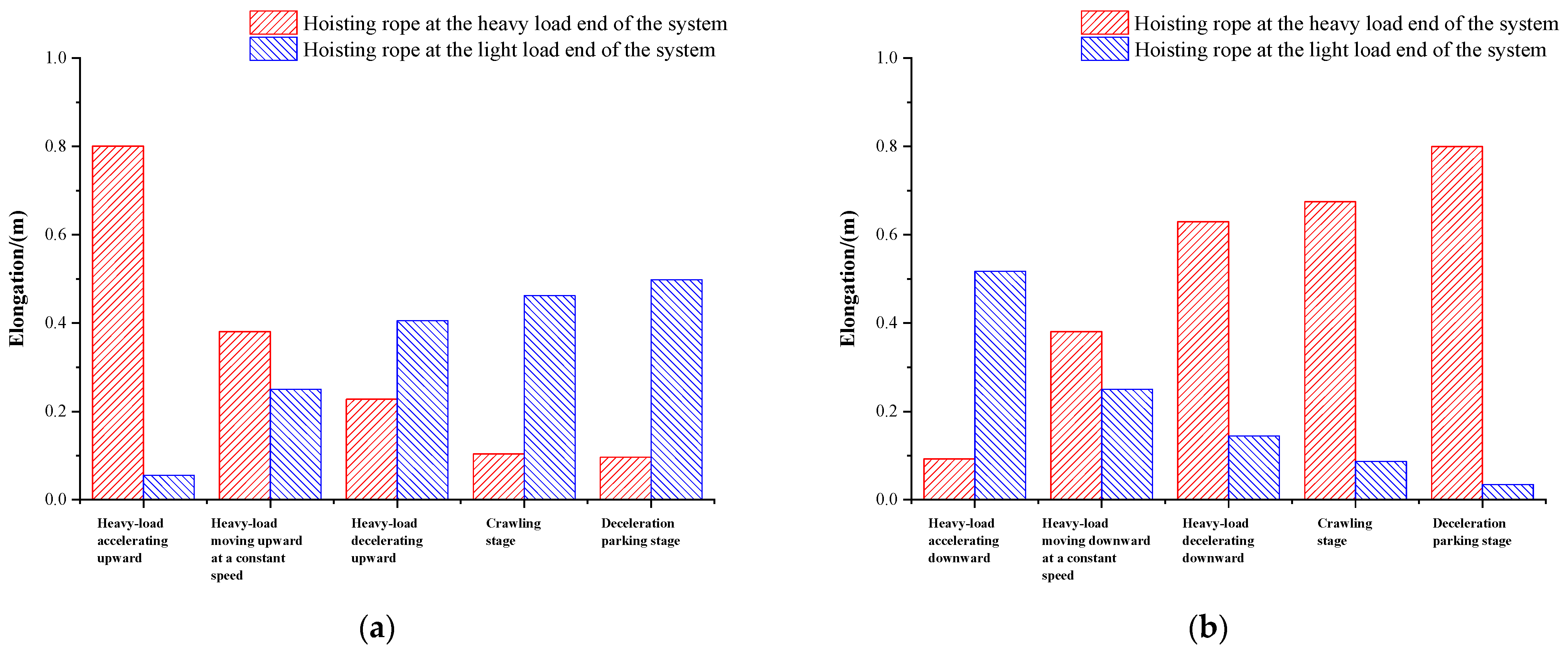
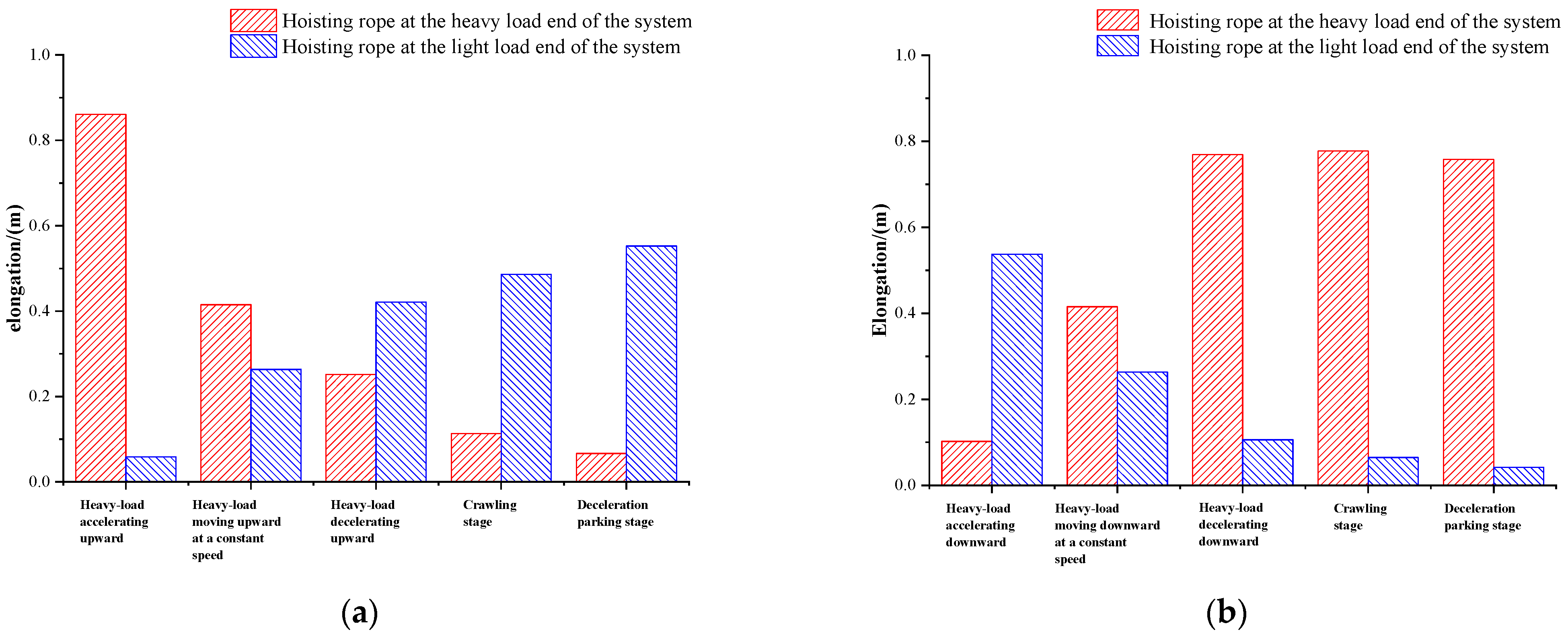
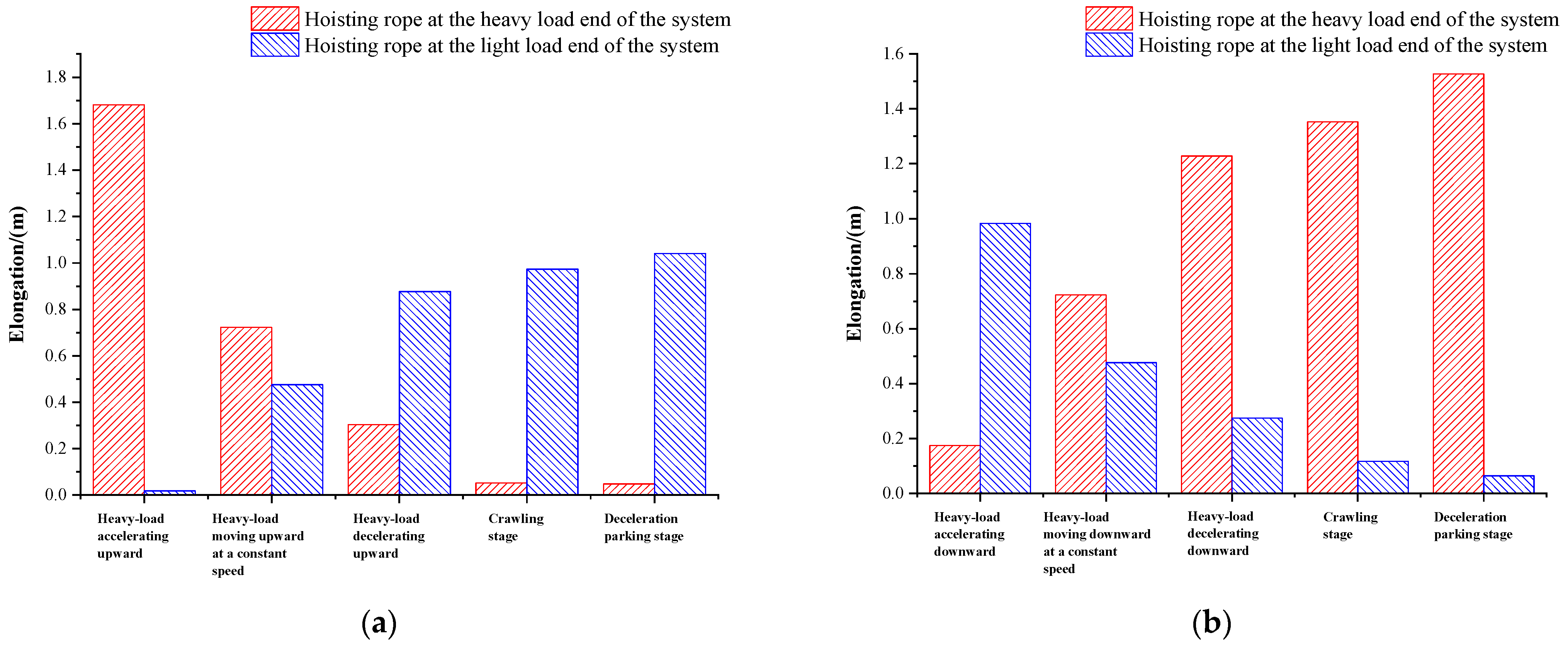
2.4.5. Elongation of Hoisting Wire Rope
3. Design and Calculation Results of Vertical Shaft Multi-Rope Friction Hoisting System
3.1. Operational and Structural Parameters of Typical Hoisting System
3.2. Selection Parameters of Hoisting Wire Rope and Balancing Tail Rope
3.3. Static Analysis and Calculation of the Hoisting System
3.4. Dynamic Analysis and Calculation of the Hoisting System
3.4.1. Equivalent Mass and Limit Acceleration/Deceleration
3.4.2. Dynamic Tension and Dynamic Anti-Slip Safety Coefficient of Hoisting Rope
3.4.3. Elongation of Hoisting Wire Rope
4. Conclusions
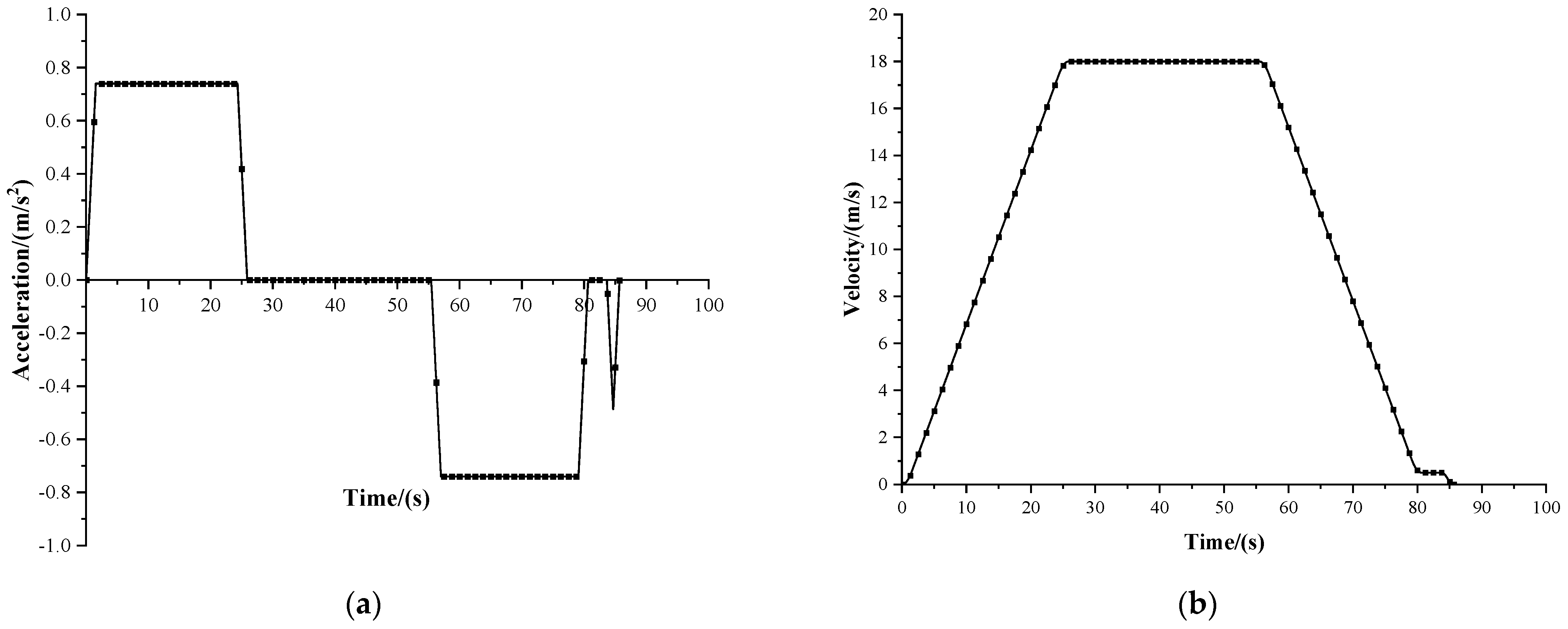
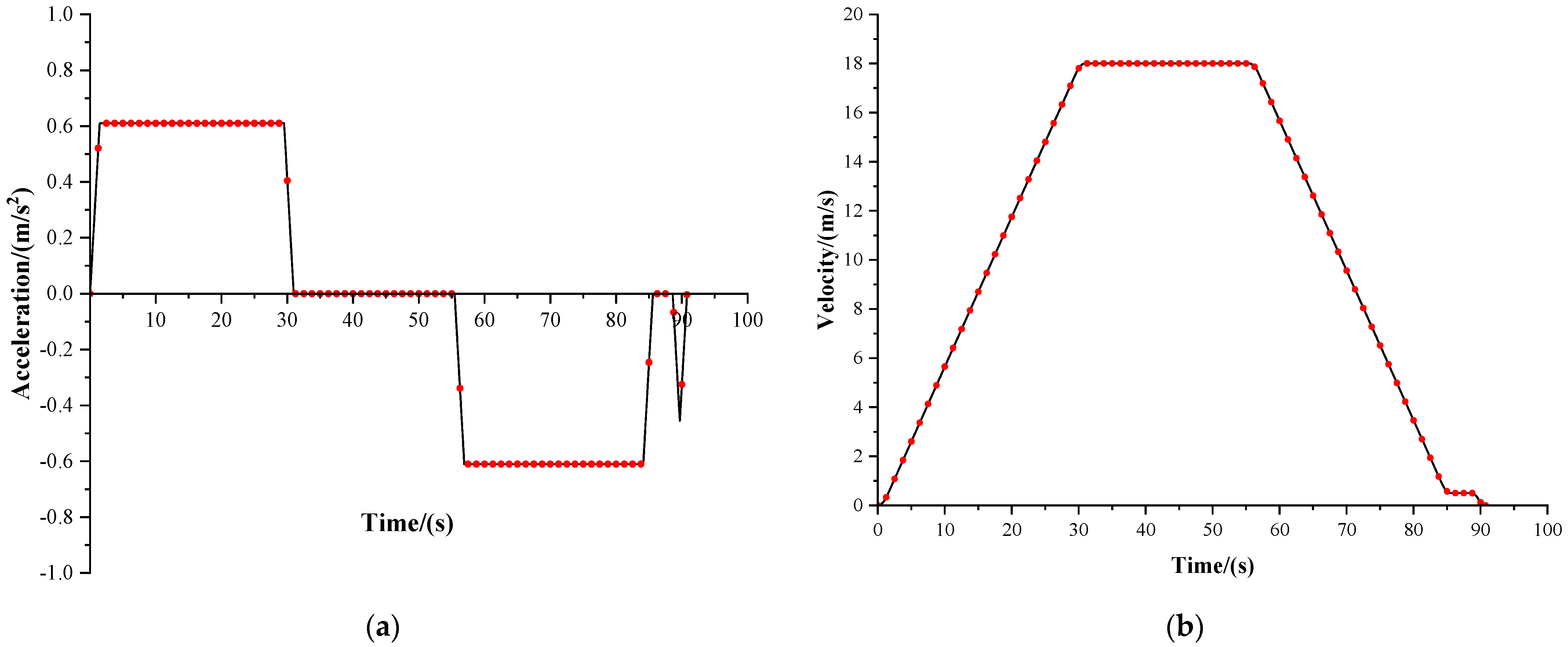
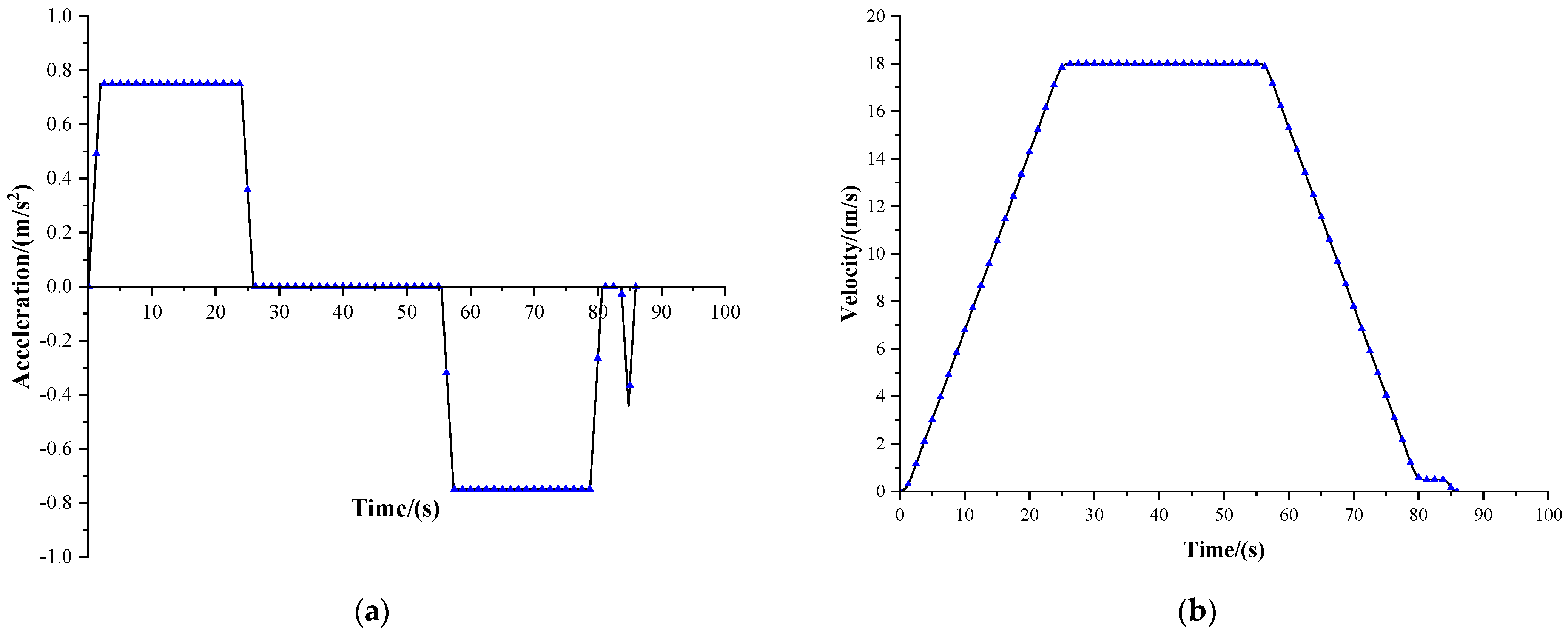
- The results show that the maximum acceleration/deceleration speed of the compacted strand steel wire rope is 0.75 m/s2, and the time of lifting/lowering is the shortest, which is 85.7 s. The maximum acceleration/deceleration speed of the triangular strand steel wire rope is the smallest, which is 0.61 m/s2, and the time of lifting/lowering is the longest, which is 90.7 s.
- The maximum static tension at the tangent point of the friction wheel in different rope selection schemes was all at the heavy-load end when the right side was the heavy-load end, which was 2756 kN, 2576 kN, and 2797 kN, respectively, and the ratio of static tension was 1.56, 1.62, and 1.55, respectively. The static anti-slip safety coefficient between the hoisting rope and friction lining and the specific pressure between the hoisting rope and friction lining meet the requirements of the Safety Regulations for Coal Mines.
- The dynamic tension of the hoisting rope at the heavy-load end is positively correlated with the acceleration, and the maximum values are at the acceleration lifting stage and the deceleration lowering stage of the heavy load: 3252.8 kN, 3000 kN, and 3302.6 kN, respectively. At this time, the dynamic tension of the hoisting rope at the light-load end is the lowest: 1696.5 kN, 1551.1 kN, and 1726.6 kN, respectively. The minimum values appear at the deceleration lifting stage and the acceleration lowering stage of the heavy load: 2573.7 kN, 2400.6 kN, and 2614.2 kN, respectively. At this time, the dynamic tension of the hoisting rope at light-load end is the largest: 2132.8 kN, 1900.6 kN, and 2168.1 kN, respectively.
- The dynamic anti-slip safety coefficient of the hoisting system in the different rope selection schemes is greater than the minimum value of 1.25 stipulated in the Safety Regulations for Metal and Non-Metal Mines. The elastic modulus of the hoisting rope has a great influence on the elongation of the wire rope. Considering that the elongation of the wire rope will cause the cages on both sides to fail to reach the designated parking position at the same time, it is recommended that hoisting ropes with large elastic moduli be used.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, B.; Li, R. Impact of reduced renewable energy costs on carbon peak and carbon neutrality of power industry. Enterp. Econ. 2021, 40, 53–63. [Google Scholar]
- Wu, J.; Tang, G.; Wang, R.; Yanwei, S. Multi-objective optimization for China’s power carbon emission reduction by 2035. J. Therm. Sci. 2019, 28, 184–194. [Google Scholar] [CrossRef]
- Ding, J.; Xu, Y.; Wang, Z.; Hu, S.; Chen, H. Estimating the economics of electrical energy storage based on different policies in China. J. Therm. Sci. 2020, 29, 352–364. [Google Scholar] [CrossRef]
- Liu, S.; Song, L.; Dai, B.; VICTOR, N. Analysis on optimal dispatching of integrated energy system with additional carbon tax. J. Eng. Thermophys. 2022, 43, 1790–1800. [Google Scholar]
- Husin, H.; Zaki, M. A Critical Review of the Integration of Renewable Energy Sources with Various Technologies. Prot. Control. Mod. Power Syst. 2021, 6, 1–18. [Google Scholar]
- Li, J.; Zhang, L.; Zhang, B.; Tang, W. Coordinated planning for flexible interconnection and energy storage system in low-voltage distribution networks to improve the accommodation capacity of photovoltaic. Glob. Energy Interconnect. 2023, 6, 700–713. [Google Scholar] [CrossRef]
- Tong, W.; Lu, Z.; Chen, W.; Han, M.; Zhao, G.; Wang, X.; Deng, Z. Solid gravity energy storage: A review. J. Energy Storage 2022, 53, 105226. [Google Scholar] [CrossRef]
- Triebel, C.; Reincke-Collon, C.; Berninger, U.; Tröndle, T. Method and Apparatus for Operating an Electrical Energy Storage System. U.S. Patent 11,025,063, 1 June 2021. [Google Scholar]
- Zhang, Z.; Wu, A.; Zhang, H. Gravity Energy Storage System Depending on Coal Mine. Chinese Patent 209,676,010U, 22 November 2019. [Google Scholar]
- Song, L.; Dong, B.; Wang, D.; Wang, S.; Zhu, L.; Wu, Y. Gravity Energy Storage System of Hoisting and Transporting System Based on Mine Vertical Shaft. Chinese Patent 109,665,430A, 23 April 2019. [Google Scholar]
- Pedretti, A.; Gross, W. Energy Storage System and Method. U.S. Patent 20,200,028,379, 23 January 2020. [Google Scholar]
- O’Grady, C. Gravity powers batteries for renewable energy. Science 2021, 372, 446. [Google Scholar] [CrossRef]
- Chaves, E. Modular Gravitational Energy Storage Systems. U.S. Patent 20,210,336,478, 28 October 2021. [Google Scholar]
- Qiu, Q.; Xiao, L.; Zhang, J.; Wang, S.; Xia, X.; Tang, W.; Zhang, D.; Guo, W.; Xu, X. Gravity Energy Storage System Based on Vertical Shaft and Roadway. Chinese Patent 113,460,841A, 1 October 2021. [Google Scholar]
- Qiu, Q.; Xiao, L.; Nie, Z.; Zhang, J.; Teng, Y.; Wang, S.; Zhao, Y.; Zhou, W. Gravity Energy Storage System Based on Efficient Lifting and Transferring of Multiple Heavy Objects. Chinese Patent 114,151,296A, 8 March 2022. [Google Scholar]
- Qiu, Q.; Zhao, Y.; Xiao, L.; Nie, Z.; Zhang, J.; Teng, Y.; Wang, S.; Luo, X.; Zhou, W. Automatic Connection and Parking System for Multi-Weight Gravity Energy Storage. Chinese Patent 114,899,951A, 12 August 2022. [Google Scholar]
- Xiao, L.; Zhang, J.; Nie, Z.; Wang, Z.; Wang, S.; Tang, W.; Yan, C.; Li, X.; Xia, X.; Qiu, Q.; et al. Underground energy storage project engineering. Adv. Technol. Electr. Eng. Energy 2022, 41, 1–9. (In Chinese) [Google Scholar]
- Emergency Management Department. China’s Safety Regulations for Coal Mines; Emergency Management Department: Beijing, China, 2016.
- AQ 1014-2005; Safety Inspections-Testing Specifications of In-Service Friction Hoist System for Coal Mines. State Administration of Work Safety: Beijing, China, 2005.
- GB/T 10599-2023; Multi-Rope Friction Hoist. State Administration for Market Regulation, Standardization Administration of China: Beijing, China, 2023.
- GB/T 8918-2006; Steel Wire Ropes for Important Purposes. General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China: Beijing, China, 2006.
- Li, Y.; Co, Z. Basic Theory of Mine Hoisting System; Coal Industry Press: Beijing, China, 2013. [Google Scholar]
- YB/T 5359-2020; Compacted Strand Ropes. Ministry of Industry and Information Technology of the People’s Republic of China: Beijing, China, 2020.
- Wang, S. Selection and damage analysis of balance rope of multi rope friction elevator in coal mine vertical shaft. Technol. Enterp. 2013, 3, 273. (In Chinese) [Google Scholar]
- GB/T 20119-2023; Steel Wire Ropes for Balance. State Administration for Market Regulation, Standardization Administration of China: Beijing, China, 2023.
- GB 16423-2020; Safety Regulation for Metal and Nonmetal Mines. State Administration for Market Regulation, Standardization Administration of China: Beijing, China, 2020.
- Ding, S. Study on measuring method of equivalent mass of mine elevating system. Coal Mine Mach. 2017, 38, 53–55. (In Chinese) [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Use Classification | Minimum Ratio | |
|---|---|---|
| Friction wheel and the sheave wheel of the floor-standing friction hoisting system, and the friction wheel of the tower friction hoisting system with a wrapping angle greater than 180° | Aboveground | 90 |
| Underground | 80 | |
| Friction wheel of the tower friction hoisting system with a wrapping angle of 180° | Aboveground | 80 |
| Underground | 70 | |
| Guide wheel of friction hoisting system | 80 | |
| Drum and the sheave wheel with a wrapping angle greater than 90° of the ground winding hoisting system | 80 | |
| Sheave wheel with a wrapping angle smaller than 90° of the ground winding hoisting system | 60 | |
| Drum of the underground winding hoist and drilling hoist, the leading wheel and tail guide wheel and the sheave wheel with a wrapping angle greater than 90° of the underground overhead passenger device | 60 | |
| Sheave wheel with a wrapping angle smaller than 90° of the underground winding hoist, the drilling hoist and the underground overhead passenger device | 40 | |
| Service Classification | Minimum Safety Coefficient | ||
|---|---|---|---|
| Single rope winding hoisting system | Specially designed for hoisting personnel | 9 | |
| Hoist personnel and materials | Hoist personnel | 9 | |
| Mixed hoist | 9 | ||
| Hoist materials | 7.5 | ||
| Specially designed for hoisting materials | 6.5 | ||
| Friction wheel hoisting system | Specially designed for hoisting personnel | 9.2–0.0005H | |
| Hoist personnel and materials | Hoist personnel | 9.2–0.0005H | |
| Mixed hoist | 9.2–0.0005H | ||
| Hoist materials | 8.2–0.0005H | ||
| Specially designed for hoisting materials | 7.2–0.0005H | ||
| Cage guide rope, anti-collision rope and hoisting rope | 6 | ||
| Parameters | Hoisting Rope | ||||
|---|---|---|---|---|---|
| Round Strand | Triangular Strand | Compacted Strand | |||
| Operational Parameters | Maximum operating speed, vmax/(m/s) | 18 | |||
| Hoisting acceleration/deceleration, a/(m/s2) | 0.74 | 0.61 | 0.75 | ||
| Operating time, T/(s) | 85.9 | 90.7 | 85.7 | ||
| Structural parameters | Upper rope length, Ls/(m) | 62.2 | |||
| Lower rope length, Lx/(m) | 49.49 | ||||
| Upper rope angle, βs/(°) | 53.04 | ||||
| Lower rope angle, βx/(°) | 54.39 | ||||
| Wrapping angle of hoisting rope on friction lining, α/(rad) | 181.35 | ||||
| Sheave wheel diameter ratio | The calculation result of Equation (6)/(mm) | ≥5580 | ≥5220 | ≥5400 | |
| The calculation result of Equation (7)/(mm) | ≥3936 | ≥3804 | ≥4400 | ||
| Friction wheel-groove spacing/(mm) | 425 | ||||
| Design Parameter | Selection Scheme | |||
|---|---|---|---|---|
| Selection design of hoisting rope | Structure | Round strand | Triangular strand | Compacted strand |
| 6 × 37S + IWR | 6V × 37 + FC | 35W × K19S | ||
| Number of hoisting rope, n1 | 6 | 6 | 6 | |
| Minimum safety coefficient, ma specified by Regulations | 6.7 | 6.7 | 6.7 | |
| Minimum nominal diameter, dmin/(mm) | 60 | 67.2 | 54 | |
| Actual selected nominal diameter, d1/(mm) | 62 | 58 | 60 | |
| Weightlift factor, K1 | 0.418 | 0.405 | 0.48 | |
| Minimum breaking force factor, K2 | 0.356 | 0.36 | 0.395 | |
| Conversion factor, K3 | 1.321 | 1.177 | 1.287 | |
| Nominal tensile strength, R0/(MPa) | 1770 | 1770 | 1960 | |
| Unit weight, pk/(kg/m) | 16.6 | 13.6 | 17.3 | |
| Cross-sectional area, A/(mm2) | 3019 | 2642 | 2827 | |
| Elastic modulus, ES/(GPa) | 210 | 206 | 120 | |
| Minimum breaking force, F0/(kN) | 2420 | 2140 | 2787 | |
| Calculated minimum breaking force, F0/(kN) | 2422 | 2144 | 2787 | |
| Safety coefficient, m (Calculated value) | 6.9 | 5.8 | 7.6 | |
| Load ratio = Effective lifting load/Rope weight | 1.54 | 1.88 | 1.48 | |
| Selection design of balance tail rope | Number of tail rope, n2 | 4 | 4 | 3 |
| Unit weight, qk/(kg/m) | 24.9 | 20.4 | 34.2 | |
| Elastic modulus, Ew/(GPa) | 120 | 120 | 120 | |
| Heavy-Load End Position | Calculation Parameter | Round Strand | Triangular Strand | Compacted Strand |
|---|---|---|---|---|
| Left cage as heavy-load end | Static tension at friction wheel cut point at heavy-load end, Fj1/(kN) | 2752 | 2573 | 2793 |
| Static tension at friction wheel cut point at light-load end, Fj2/(kN) | 1776 | 1596 | 1805 | |
| Ratio of static tension, Fj1/Fj2 | 1.55 | 1.61 | 1.54 | |
| Static anti-slip safety coefficient of the rope-lining, δ | 2.19 | 1.97 | 2.20 | |
| Pressure ratio of the rope-lining, P/(MPa) | 1.74 | 1.71 | 1.82 | |
| Right cage as heavy-load end | Static tension at friction wheel cut point at heavy-load end, Fj3/(kN) | 2756 | 2576 | 2797 |
| Static tension at friction wheel cut point at light-load end, Fj4/(kN) | 1771 | 1593 | 1802 | |
| Ratio of static tension, Fj1/Fj2 | 1.56 | 1.62 | 1.55 | |
| Static anti-slip safety coefficient of the rope-lining, δ | 2.17 | 1.96 | 2.18 | |
| Pressure ratio of the rope-lining, P/(MPa) | 1.74 | 1.71 | 1.82 |
| Parameters | Position of the Heavy-Load End | Calculation Parameter | Hoisting Rope | ||
|---|---|---|---|---|---|
| Round Strand | Triangular Strand | Compacted Strand | |||
| Displacement mass of hoisting system | Left cage | Maximum displacement mass at heavy-load end, m1/(t) | 332 | 312 | 335 |
| Minimum displacement mass at light-load end, m2/(t) | 229 | 210 | 234 | ||
| Right cage | Maximum displacement mass at heavy-load end, m3/(t) | 329 | 310 | 334 | |
| Minimum displacement mass at light-load end, m4/(t) | 232 | 212 | 235 | ||
| Total displacement mass of hoisting system, ∑M/(t) | 736 | 696 | 744 | ||
| Limiting acceleration/deceleration of hoisting system | Left cage | Limiting acceleration/deceleration, amax/(m/s2) | 0.94 | 0.78 | 0.95 |
| Right cage | 0.93 | 0.76 | 0.94 | ||
| Actual acceleration/deceleration value = 0.8·Min [Left, Right amax] | 0.74 | 0.61 | 0.75 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Q.; Wang, D.; Zeng, X.; Guo, Y.; Wang, H.; Xu, Z.; Deng, Q.; Zhong, H.; Wang, B.; Li, C. Research on the Design of Multi-Rope Friction Hoisting System of Vertical Shaft Gravity Energy Storage System. Appl. Sci. 2024, 14, 7556. https://doi.org/10.3390/app14177556
Shi Q, Wang D, Zeng X, Guo Y, Wang H, Xu Z, Deng Q, Zhong H, Wang B, Li C. Research on the Design of Multi-Rope Friction Hoisting System of Vertical Shaft Gravity Energy Storage System. Applied Sciences. 2024; 14(17):7556. https://doi.org/10.3390/app14177556
Chicago/Turabian StyleShi, Qinpeng, Dagang Wang, Xiaochao Zeng, Yinan Guo, Hao Wang, Ziyang Xu, Qiao Deng, Hailang Zhong, Bo Wang, and Chenchen Li. 2024. "Research on the Design of Multi-Rope Friction Hoisting System of Vertical Shaft Gravity Energy Storage System" Applied Sciences 14, no. 17: 7556. https://doi.org/10.3390/app14177556