
A Carbon Benefits-Based Signal Control Method in a Connected Environment



Abstract
1. Introduction
- Higher ceiling of carbon emissions reduction at signal control intersection;
- Ensured higher CR of vehicles by taking advantage of carbon economic incentives;
- Provided a method for calculating carbon emissions reduction at the intersection.
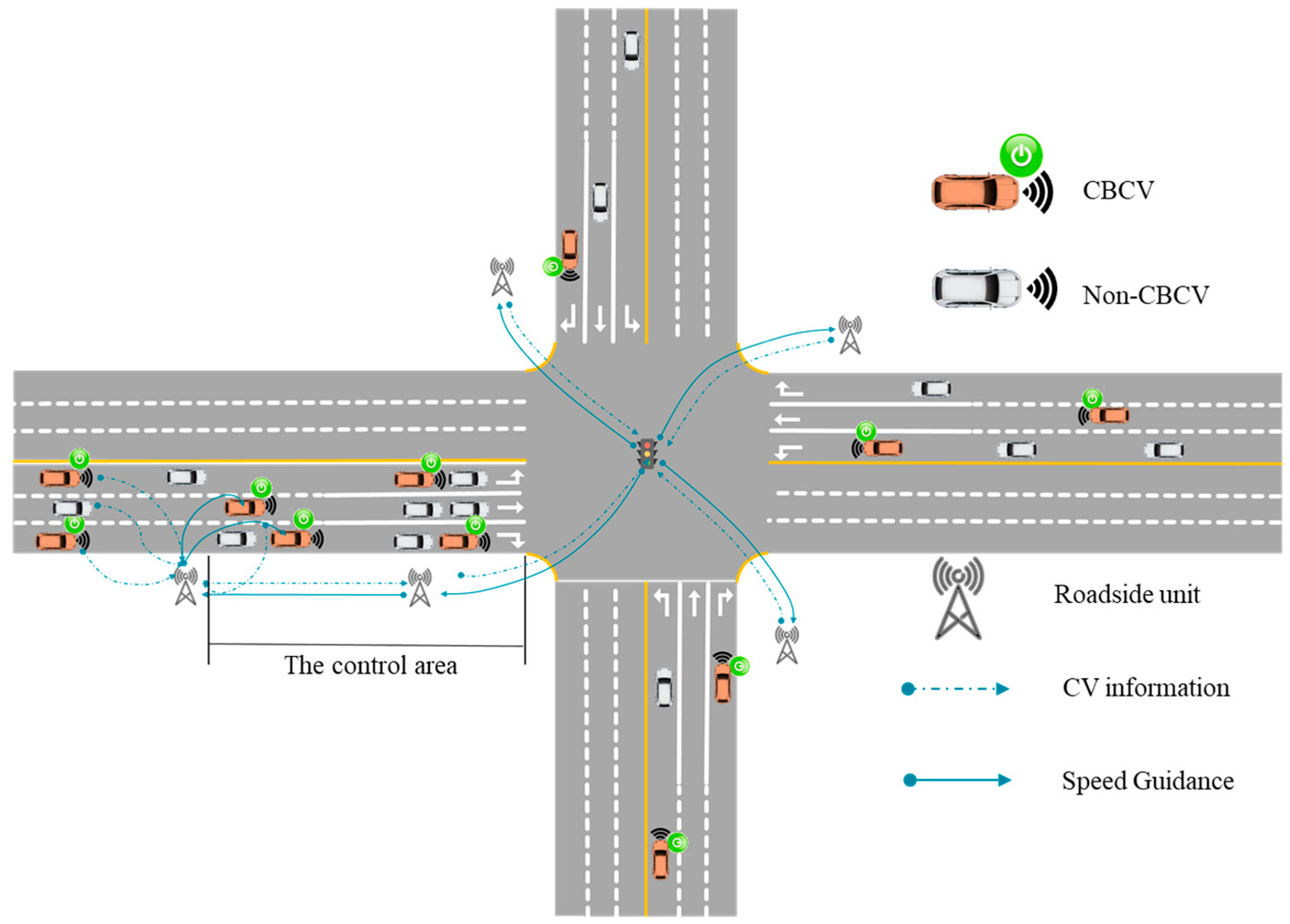
2. Control Mechanism
3. Problem Statements
4. Methodology
4.1. Parameters and Notations
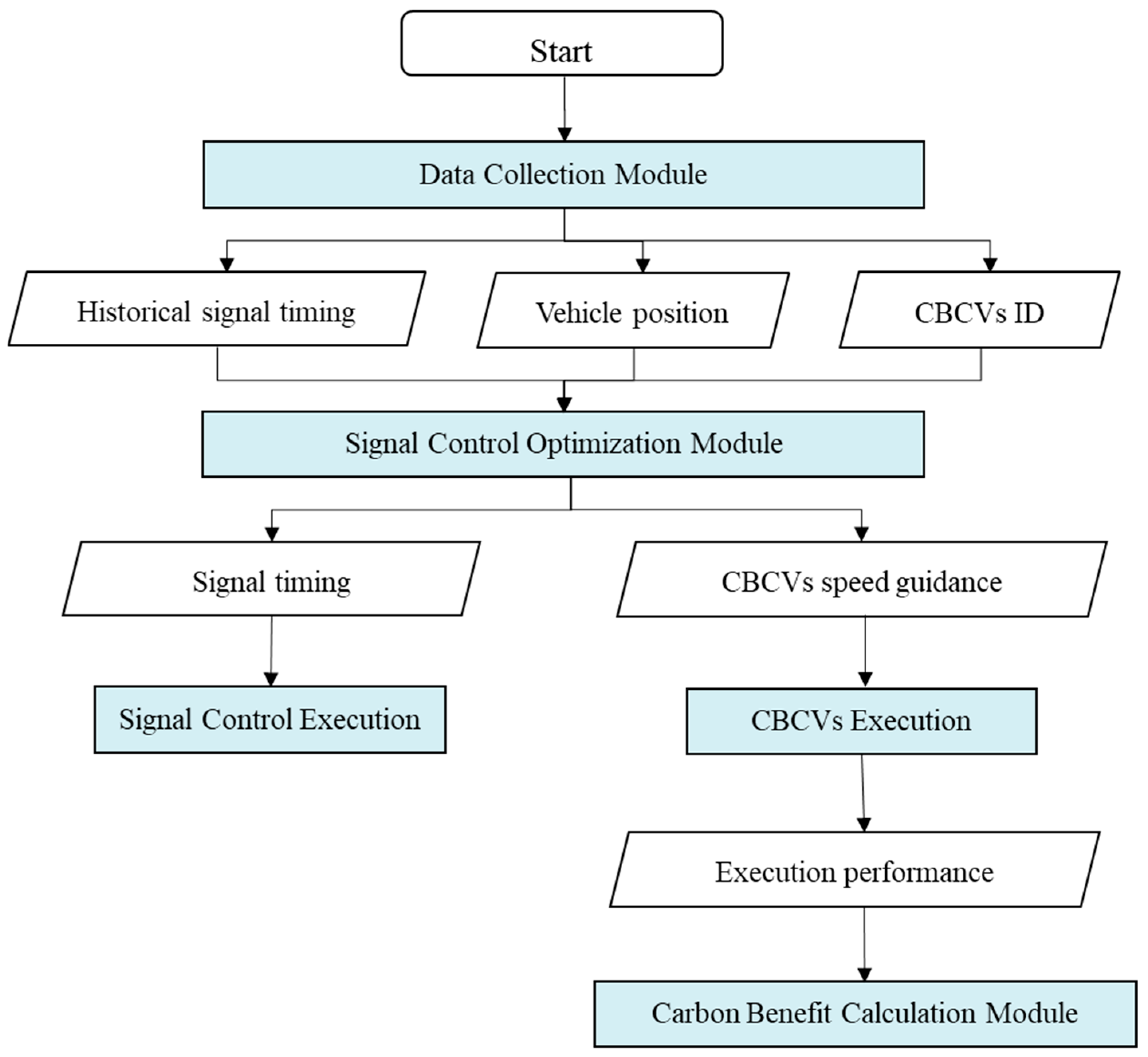
4.2. Control Structure
- Data collection module: This module collects historical signal timing, determines vehicles positions within the control area, and identifies the IDs of CBCVs.
- Signal control optimization module: This module provides the signal timing plan and speed guidance to CBCVs.
- Carbon benefit calculation module: This module evaluates the execution performance of CBCVs based on speed guidance and computes their carbon benefits.
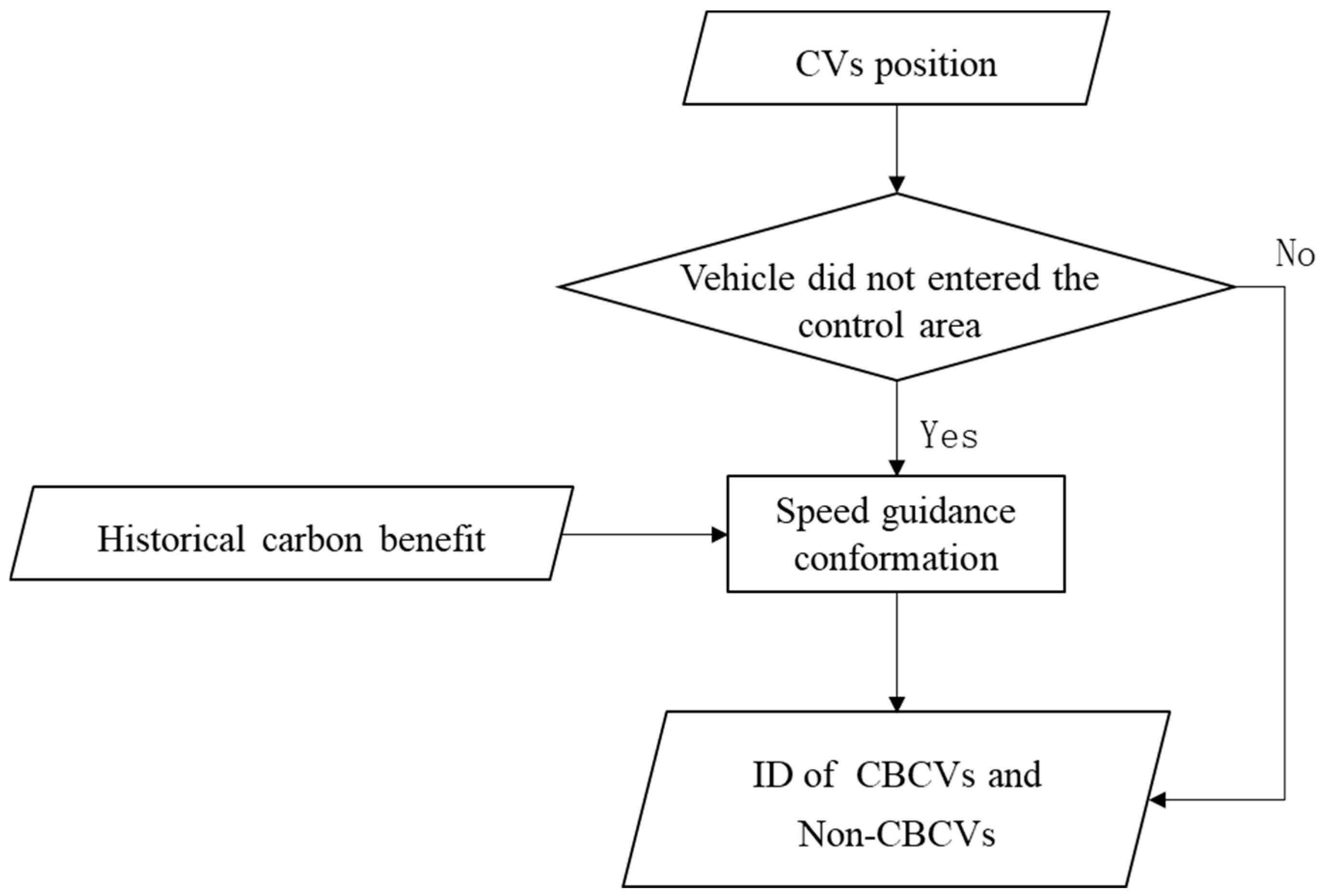
4.3. Data Collection Module
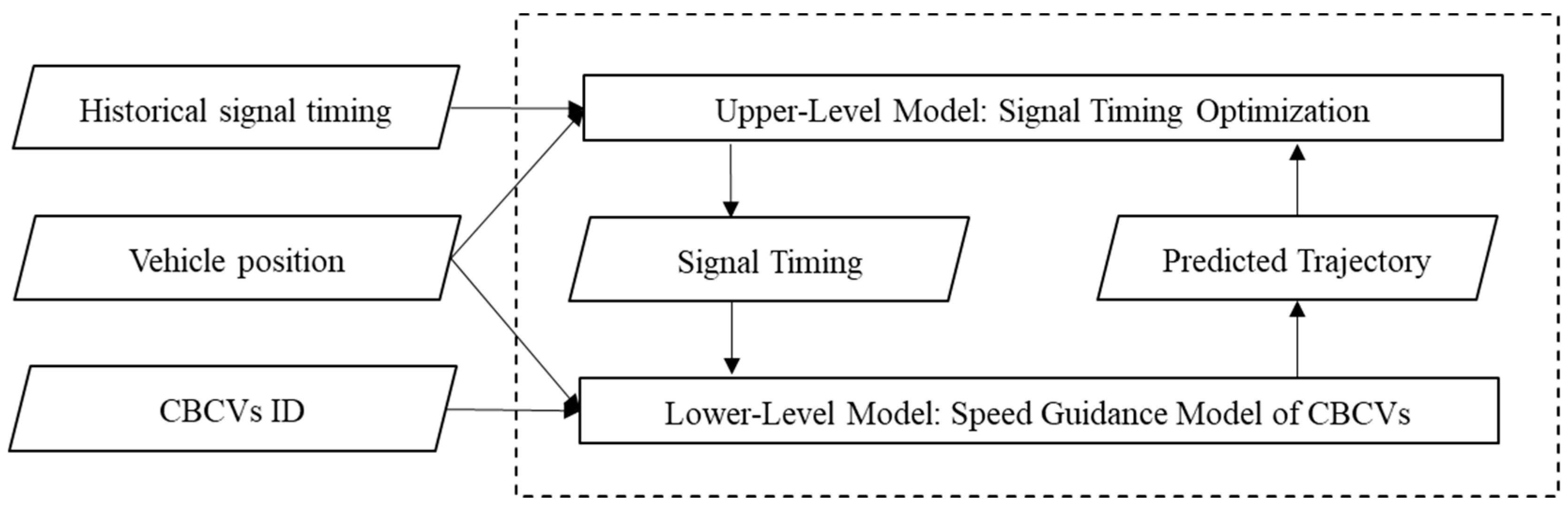
4.4. Signal Control Optimization Module
- 1.
- Upper-level model
- a.
- Calculation of Delay
- b.
- Constraints on Signal timing.
- c.
- Constraints on the smoothness of signal timing.
- 2.
- Lower-level model
- a.
- Trajectory prediction for non-CBCVs
- b.
- Target speed optimization for CBCVs
- (a)
- Trajectory planning of CBCVs:
- (b)
- Speed guidance for CBCVs:
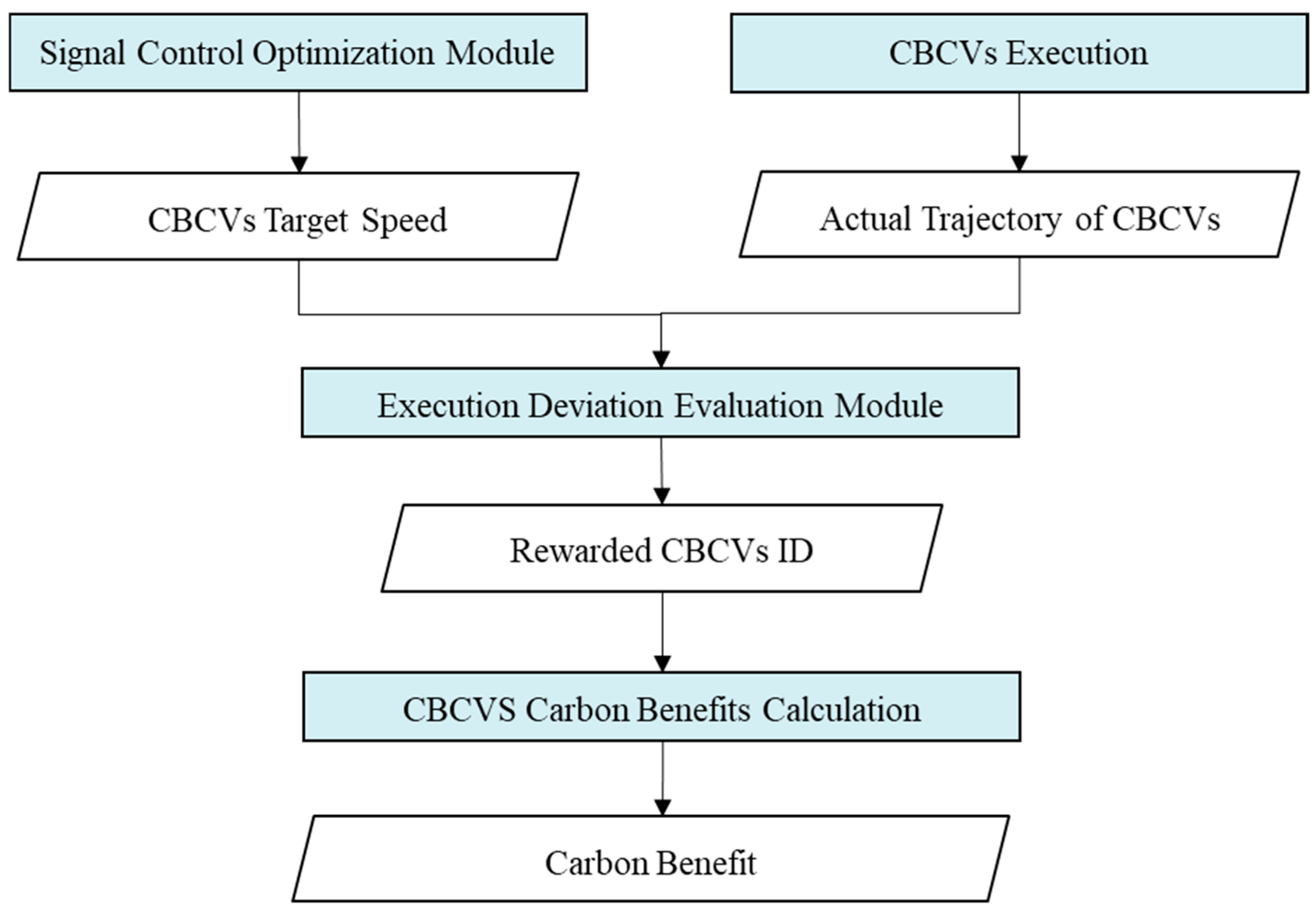
4.5. Carbon Benefit Calculation Module
- a.
- Data Preparation
- b.
- Execution Deviation Evaluation Module
- c.
- CBCVs Carbon Benefit Calculation
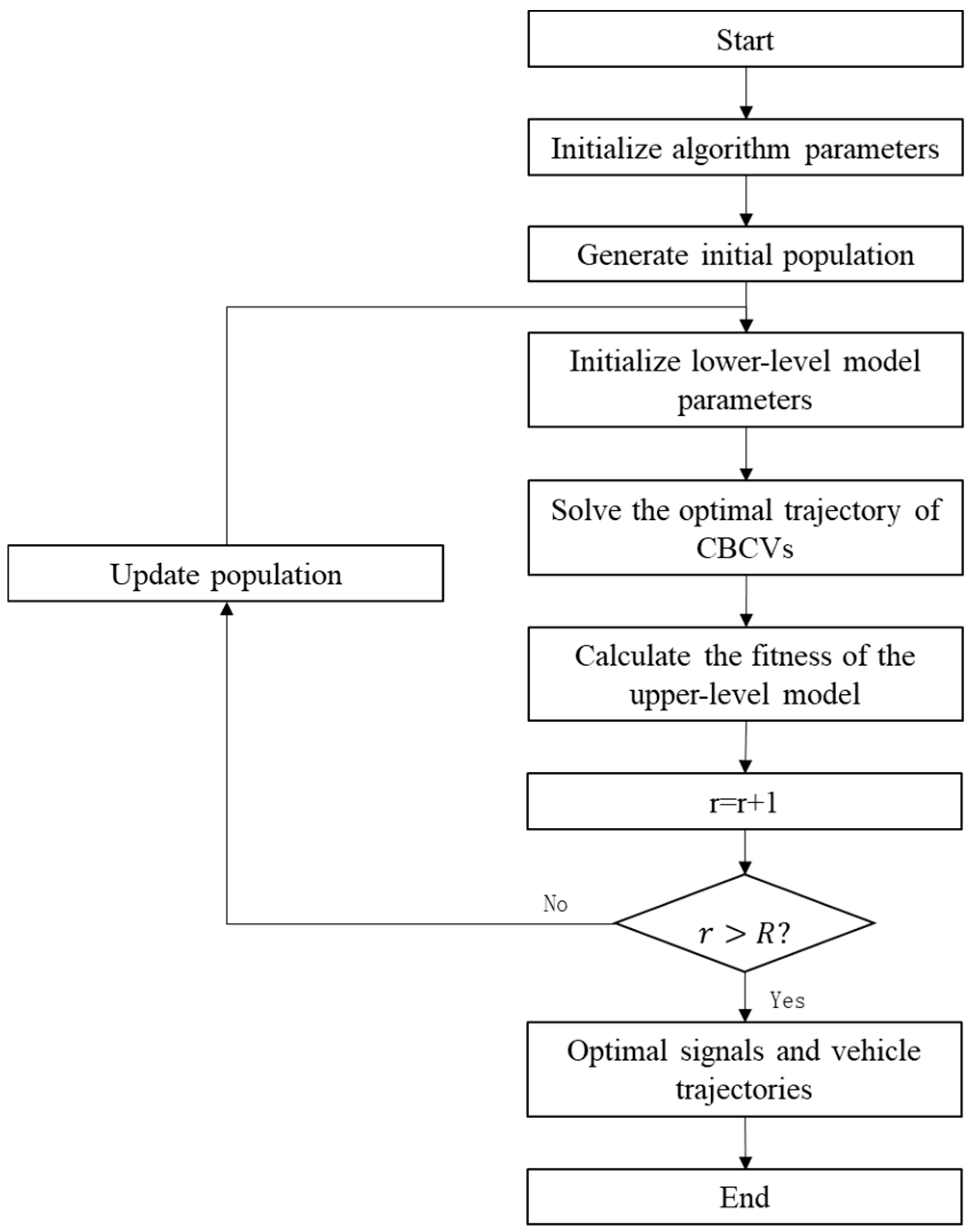
4.6. Solution
5. Evaluation
5.1. Experiment Design
5.1.1. Testbed
5.1.2. Simulation Platform
5.1.3. Tested Model
5.1.4. Sensitivity Analysis
- (i)
- Balanced traffic demand in all directions.
- (ii)
- Uneven straight-through traffic demand on arteries.
- (iii)
- Uneven left-turn traffic demand on main arteries.
- (iv)
- Uneven traffic demand of both straight-through and left-turn traffic on main arteries.
5.1.5. Measurement of Effectiveness
5.2. Results
5.2.1. Carbon Emission
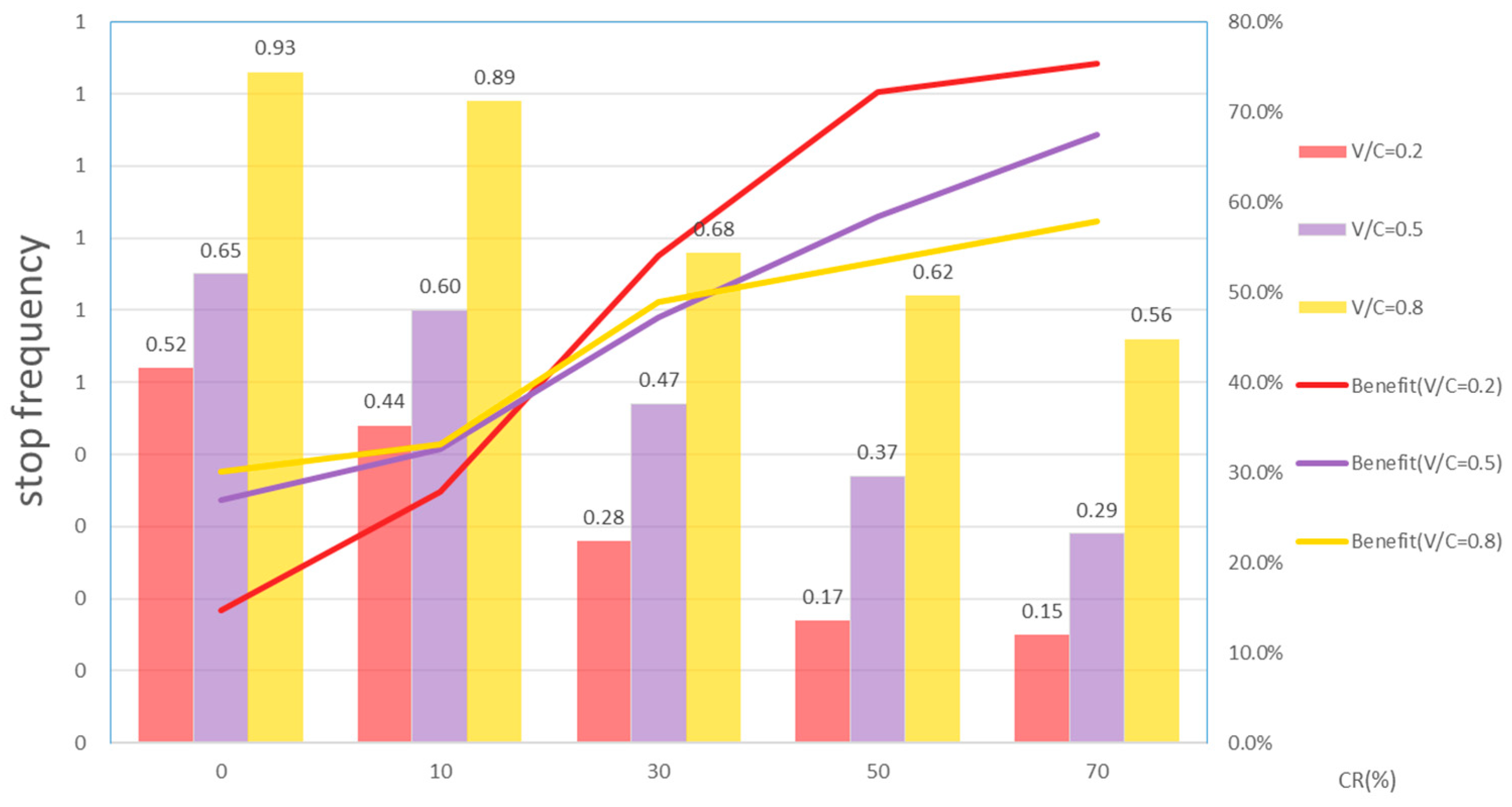
5.2.2. Stop Frequency
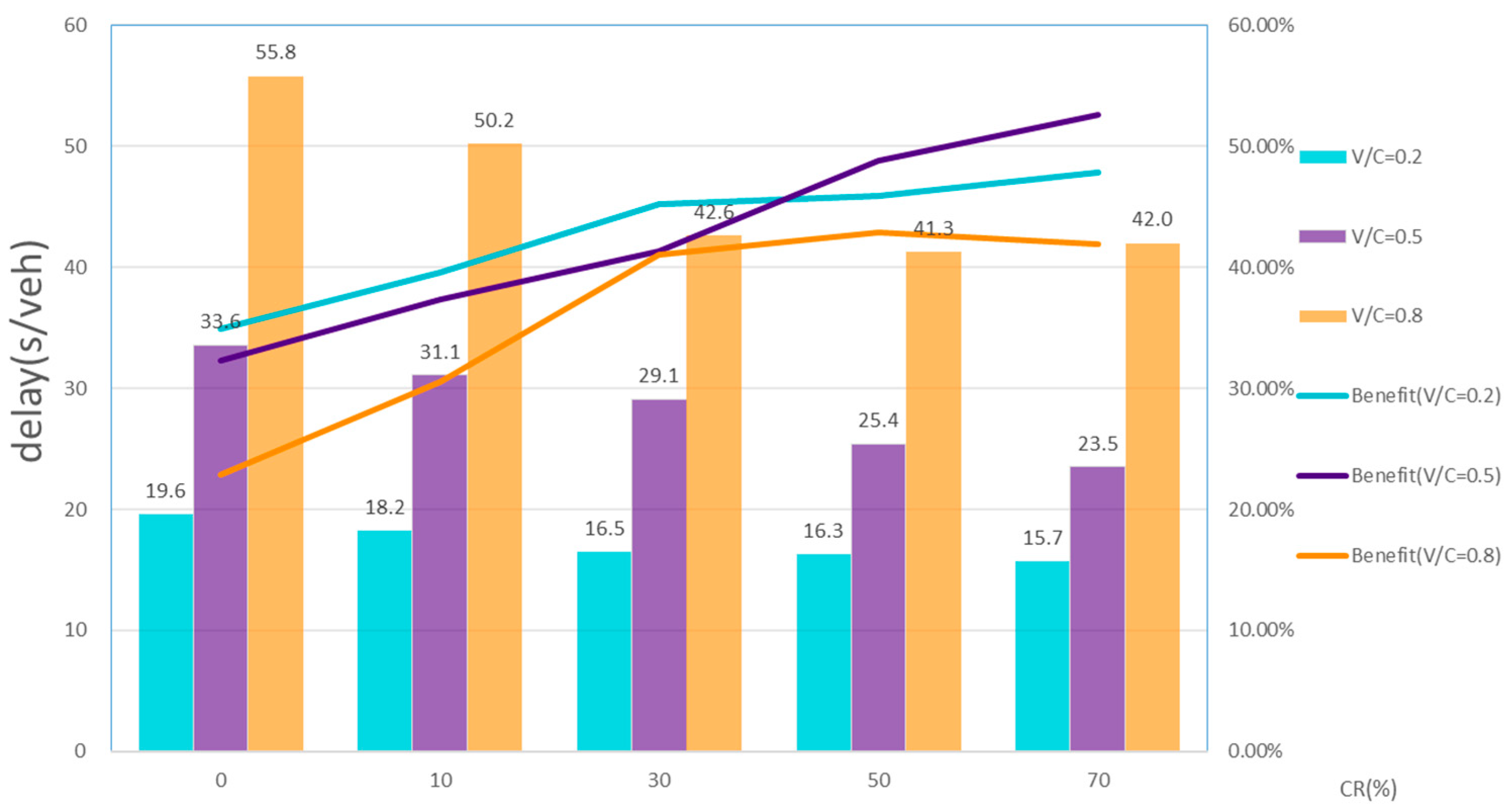
5.2.3. Delay
5.2.4. Carbon Benefits
6. Discussion
6.1. Summary and Analysis of the Results
6.2. Advantages and Limitations
6.3. Prospects for Application
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Agency (IEA). CO2 Emissions in 2022; International Energy Agency: Paris, France, 2023. [Google Scholar]
- Lents, J.; Nikkila, N. IVE Model User Manual (Version 1.1.1); International Sustainable Systems Research Center (ISSRC), EUA: La Habra, CA, USA, 2004. [Google Scholar]
- Liu, H.; He, K.; Barth, M. Traffic and emission simulation in China based on statistical methodology. Atmos. Environ. 2011, 45, 1154–1161. [Google Scholar] [CrossRef]
- Kang, Z.; An, L.; Lai, J.; Yang, X.; Sun, W. Eco-Speed Harmonization with Partially Connected and Automated Traffic at an Isolated Intersection. J. Adv. Transp. 2023, 2023, 9948462. [Google Scholar] [CrossRef]
- Zhong, S.; Zhao, Y.; Ge, L.; Shan, Z.; Ma, F. Vehicle State and Bias Estimation Based on Unscented Kalman Filter with Vehicle Hybrid Kinematics and Dynamics Models. Automot. Innov. 2023, 6, 571–585. [Google Scholar] [CrossRef]
- Feng, Y.; Head, K.L.; Khoshmagham, S.; Zamanipour, M. A real-time adaptive signal control in a connected vehicle environment. Transp. Res. Part C Emerg. Technol. 2015, 55, 460–473. [Google Scholar] [CrossRef]
- Chen, S.; Sun, D.J. An improved adaptive signal control method for isolated signalized intersection based on dynamic programming. IEEE Intell. Transp. Syst. Mag. 2016, 8, 4–14. [Google Scholar] [CrossRef]
- Ren, Y.; Wang, Y.; Yu, G.; Liu, H.; Xiao, L. An adaptive signal control scheme to prevent intersection traffic blockage. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1519–1528. [Google Scholar] [CrossRef]
- Yao, Z.; Jiang, Y.; Zhao, B.; Luo, X.; Peng, B. A dynamic optimization method for adaptive signal control in a connected vehicle environment. J. Intell. Transp. Syst. 2020, 24, 184–200. [Google Scholar] [CrossRef]
- Zheng, L.; Li, X. Simulation-based optimization method for arterial signal control considering traffic safety and efficiency under uncertainties. Comput.-Aided Civ. Infrastruct. Eng. 2023, 38, 640–659. [Google Scholar] [CrossRef]
- Koch, L.; Brinkmann, T.; Wegener, M.; Badalian, K.; Andert, J. Adaptive Traffic Light Control with Deep Reinforcement Learning: An Evaluation of Traffic Flow and Energy Consumption. IEEE Trans. Intell. Transp. Syst. 2023, 24, 15066–15076. [Google Scholar] [CrossRef]
- Lin, Y.; Guan, H.; Lu, K.; Ma, Y.; Zhao, S. Eco-oriented signal control of intersections with vehicle type considerations using integrated estimation of driving behavior. J. Clean. Prod. 2022, 375, 133986. [Google Scholar] [CrossRef]
- Tang, T.-Q.; Zhang, J.; Liu, K. A speed guidance model accounting for the driver’s bounded rationality at a signalized intersection. Phys. A Stat. Mech. Its Appl. 2017, 473, 45–52. [Google Scholar] [CrossRef]
- Almannaa, M.H.; Chen, H.; Rakha, H.A.; Loulizi, A.; El-Shawarby, I. Field implementation and testing of an automated eco-cooperative adaptive cruise control system in the vicinity of signalized intersections. Transp. Res. Part D Transp. Environ. 2019, 67, 244–262. [Google Scholar] [CrossRef]
- Li, D.; Zhang, K.; Dong, H.; Wang, Q.; Li, Z.; Song, Z. Physics-augmented data-enabled predictive control for eco-driving of mixed traffic considering diverse human behaviors. IEEE Trans. Control. Syst. Technol. 2024, 32, 1479–1486. [Google Scholar] [CrossRef]
- Naeem, H.M.Y.; Butt, Y.A.; Ahmed, Q.; Bhatti, A.I. Optimal-Control-Based Eco-Driving Solution for Connected Battery Electric Vehicle on a Signalized Route. Automot. Innov. 2023, 6, 586–596. [Google Scholar] [CrossRef]
- Chen, P.; Yan, C.; Sun, J.; Wang, Y.; Chen, S.; Li, K. Dynamic eco-driving speed guidance at signalized intersections: Multi vehicle driving simulator based experimental study. J. Adv. Transp. 2018, 2018, 6031764. [Google Scholar] [CrossRef]
- Yu, S.; Fu, R.; Guo, Y.; Xin, Q.; Shi, Z. Consensus and optimal speed advisory model for mixed traffic at an isolated signalized intersection. Phys. A Stat. Mech. Its Appl. 2019, 531, 121789. [Google Scholar] [CrossRef]
- Zhang, Z.; Zou, Y.; Zhang, X.; Zhang, T. Green light optimal speed advisory system designed for electric vehicles considering queuing effect and driver’s speed tracking error. IEEE Access 2020, 8, 208796–208808. [Google Scholar] [CrossRef]
- Rabinowitz, A.I.; Ang, C.C.; Mahmoud, Y.H.; Araghi, F.M.; Meyer, R.T.; Kolmanovsky, I.; Asher, Z.D.; Bradley, T.H. Real-time implementation comparison of urban eco-driving controls. IEEE Trans. Control. Syst. Technol. 2023, 32, 143–157. [Google Scholar] [CrossRef]
- Tajalli, M.; Hajbabaie, A. Traffic signal timing and trajectory optimization in a mixed autonomy traffic stream. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6525–6538. [Google Scholar] [CrossRef]
- Liu, H.; Lu, X.-Y.; Shladover, S.E. Traffic signal control by leveraging cooperative adaptive cruise control (CACC) vehicle platooning capabilities. Transp. Res. Part C Emerg. Technol. 2019, 104, 390–407. [Google Scholar] [CrossRef]
- Yao, Z.; Zhao, B.; Yuan, T.; Jiang, H.; Jiang, Y. Reducing gasoline consumption in mixed connected automated vehicles environment: A joint optimization framework for traffic signals and vehicle trajectory. J. Clean. Prod. 2020, 265, 121836. [Google Scholar] [CrossRef]
- Pourmehrab, M.; Elefteriadou, L.; Ranka, S.; Martin-Gasulla, M. Optimizing signalized intersections performance under conventional and automated vehicles traffic. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2864–2873. [Google Scholar] [CrossRef]
- Niroumand, R.; Tajalli, M.; Hajibabai, L.; Hajbabaie, A. Joint optimization of vehicle-group trajectory and signal timing: Introducing the white phase for mixed-autonomy traffic stream. Transp. Res. Part C Emerg. Technol. 2020, 116, 102659. [Google Scholar] [CrossRef]
- Guo, Y.; Ma, J. DRL-TP3: A learning and control framework for signalized intersections with mixed connected automated traffic. Transp. Res. Part C Emerg. Technol. 2021, 132, 103416. [Google Scholar] [CrossRef]
- Hu, J.; Li, S.; Wang, H.; Wang, Z.; Barth, M.J. Eco-approach at an isolated actuated signalized intersection: Aware of the passing time window. J. Clean. Prod. 2024, 435, 140493. [Google Scholar] [CrossRef]
- Hu, Y.; Yang, P.; Zhao, M.; Li, D.; Zhang, L.; Hu, S.; Hua, W.; Ji, W.; Wang, Y.; Guo, J. A generic approach to eco-driving of connected automated vehicles in mixed urban traffic and heterogeneous power conditions. IEEE Trans. Intell. Transp. Syst. 2023, 24, 11963–11980. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, G.; Hao, P.; Barth, M.J. Cluster-wise cooperative eco-approach and departure application for connected and automated vehicles along signalized arterials. IEEE Trans. Intell. Veh. 2018, 3, 404–413. [Google Scholar] [CrossRef]
- Hill, C.J.; Garrett, J.K. AASHTO Connected Vehicle Infrastructure Deployment Analysis; Joint Program Office for Intelligent Transportation Systems: Washington, DC, USA, 2011. [Google Scholar]
- Shukla, P.R.; Skea, J.; Slade, R.; Al Khourdajie, A.; Van Diemen, R.; McCollum, D.; Pathak, M.; Some, S.; Vyas, P.; Fradera, R. Climate change 2022: Mitigation of climate change. Contrib. Work. Group III Sixth Assess. Rep. Intergov. Panel Clim. Change 2022, 10, 9781009157926. [Google Scholar]
- Shahbaz, M.; Li, J.; Dong, X.; Dong, K. How financial inclusion affects the collaborative reduction of pollutant and carbon emissions: The case of China. Energy Econ. 2022, 107, 105847. [Google Scholar] [CrossRef]
- Chen, Z.; Du, H.; Li, J.; Southworth, F.; Ma, S. Achieving low-carbon urban passenger transport in China: Insights from the heterogeneous rebound effect. Energy Econ. 2019, 81, 1029–1041. [Google Scholar] [CrossRef]
- Ghate, A.T.; Qamar, S. Carbon footprint of urban public transport systems in Indian cities. Case Stud. Transp. Policy 2020, 8, 245–251. [Google Scholar] [CrossRef]
- Li, X.; Tan, X.; Wu, R.; Xu, H.; Zhong, Z. Paths for Carbon Peak and Carbon Neutrality in Transport Sector in China. Strateg. Study CAE 2021, 23, 15–21. [Google Scholar] [CrossRef]
- Ghosh, A. Possibilities and challenges for the inclusion of the electric vehicle (EV) to reduce the carbon footprint in the transport sector: A review. Energies 2020, 13, 2602. [Google Scholar] [CrossRef]
- Li, R.; Fang, D.; Xu, J. Does China’s carbon inclusion policy promote household carbon emissions reduction? Theoretical mechanisms and empirical evidence. Energy Econ. 2024, 132, 107462. [Google Scholar] [CrossRef]
- Yu, L.; Liu, Y.; Cheng, Y.; Zhou, Y. Carbon Inclusion for Green Travel and Practices in Beijing. Urban Transp. China 2024, 22, 67–73. [Google Scholar]
- Ma, C.; Yu, C.; Zhang, C.; Yang, X. Signal timing at an isolated intersection under mixed traffic environment with self-organizing connected and automated vehicles. Comput.-Aided Civ. Infrastruct. Eng. 2023, 38, 1955–1972. [Google Scholar] [CrossRef]
- Lai, J.; Hu, J.; Cui, L.; Chen, Z.; Yang, X. A generic simulation platform for cooperative adaptive cruise control under partially connected and automated environment. Transp. Res. Part C Emerg. Technol. 2020, 121, 102874. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Explanation | Unit |
|---|---|---|
| TD | The total delay at the intersection | s |
| Y | The signal timing plan | |
| K | The set of all phases | |
| The vehicles set within the control area of phase k | ||
| The vehicles set based on CBCVs grouping within the control area of phase k | ||
| The phase number | ||
| The vehicle number, indicating the ωk-th vehicle in phase k | ||
| The number of CBCVs in the direction of phase k | ||
| The delay of vehicle ωk during passing through the intersection | s | |
| The start time of the i-th green time for phase k | ||
| The end time of the i-th green time for phase k | ||
| The number of optimization cycles | ||
| The distance between vehicle and the stop line | m | |
| The planning time interval. | s | |
| The start time of the control algorithm. | ||
| The time when vehicle crosses the stop line in trajectory planning | s | |
| The time when the vehicle passes the stop line under signal control | s | |
| The time taken by the vehicle to accelerate from crossing the stop line to its desired speed | s | |
| The time the vehicle spends in free flow to reach the point where it achieves | s | |
| The speed of the vehicle as it crosses the stop line | m/s | |
| The speed limit on the road | m/s | |
| The length of the control area | m | |
| The clearance time required during phase switching | s | |
| The minimum green time duration | s | |
| The maximum green time duration | s | |
| Execution cycle of the rolling horizon scheme | s | |
| The safety interval in the rolling horizon scheme | s | |
| The weight of the stop time | ||
| Time lag in the Newswell model | s | |
| Spatial lag in the Newswell model | m | |
| The transmission interval for speed instructions | ||
| Maximum deceleration of the vehicle | m/s2 | |
| Maximum acceleration of the vehicle | m/s2 | |
| m/s | ||
| The threshold for judging whether the vehicle has complied with the speed guidance. | ||
| g | ||
| The incentive amount per unit of carbon emission reduction | ||
| g | ||
| g |
| Parameter | Value |
|---|---|
| Length of the segment under control (m) | 300 |
| Simulation duration (s) | 1200 |
| The update time interval of signal control (s) | 1 |
| Duration of the clearance time (s) | 3 |
| Minimum green time interval (s) | 15 |
| Maximum green time interval (s) | 50 |
| Saturation flow rate (veh/h) | 1440 |
| Maximum acceleration (m/s2) | 3.5 |
| Minimum acceleration (m/s2) | −4 |
| Time lag in the Newswell model (s) | 1.6 |
| Spatial lag in the Newswell model (m) | 6 |
| Speed limit of the road (km/h) | 60 |
| The average length of vehicles (m) | 4.5 |
| The transmission interval for CBCVs speed guidance (s) | 3 |
| Execution cycle of the rolling horizon scheme (s) | 15 |
| The safety interval in the rolling horizon scheme (s) | 5 |
| The gradient of the road segment | 0 |
| Traffic Demand Structure | Traffic Demand (V/C) | |||||||
|---|---|---|---|---|---|---|---|---|
| s-n | s-w | e-w | e-s | n-s | n-e | w-e | w-n | |
| I | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 |
| II | 0.5 | 0.5 | 0.8 | 0.5 | 0.5 | 0.5 | 0.2 | 0.5 |
| III | 0.5 | 0.5 | 0.5 | 0.8 | 0.5 | 0.5 | 0.5 | 0.2 |
| IV | 0.5 | 0.5 | 0.8 | 0.8 | 0.5 | 0.5 | 0.2 | 0.2 |
| Traffic Demand Structure | Fixed Signal Control Method | Adaptive Signal Control Method | The Proposed Method | Compared to the Fixed Signal Control Method | Compared to the Adaptive Signal Control Method |
|---|---|---|---|---|---|
| I | 152.3 | 142.1 | 130.2 | 14.51% | 8.37% |
| II | 167.1 | 162.4 | 147.8 | 11.55% | 8.99% |
| III | 161.2 | 154.3 | 140.1 | 13.09% | 9.20% |
| IV | 169.3 | 161.2 | 154.2 | 8.92% | 4.34% |
| Traffic Demand Structure | Fixed Signal Control Method | Adaptive Signal Control Method | The Proposed Method | Compared to the Fixed Signal Control Method | Compared to the Adaptive Signal Control Method |
|---|---|---|---|---|---|
| I | 0.89 | 0.65 | 0.47 | 47.19% | 27.69% |
| II | 0.97 | 0.78 | 0.58 | 40.21% | 25.64% |
| III | 0.93 | 0.69 | 0.54 | 41.94% | 21.74% |
| IV | 1.01 | 0.82 | 0.59 | 41.58% | 28.05% |
| Traffic Demand Structure | Fixed Signal Control Method (s) | Adaptive Signal Control Method (s) | The Proposed Method (s) | Compared to the Fixed Signal Control Method | Compared to the Adaptive Signal Control Method |
|---|---|---|---|---|---|
| I | 49.6 | 33.6 | 29.1 | 41.33% | 13.39% |
| II | 52.1 | 33.9 | 29.5 | 43.38% | 12.98% |
| III | 51.1 | 34.1 | 30.1 | 41.10% | 11.73% |
| IV | 52.9 | 35.1 | 30.2 | 42.91% | 13.96% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, Z.; An, L.; Yang, X.; Lai, J. A Carbon Benefits-Based Signal Control Method in a Connected Environment. Appl. Sci. 2024, 14, 7638. https://doi.org/10.3390/app14177638
Kang Z, An L, Yang X, Lai J. A Carbon Benefits-Based Signal Control Method in a Connected Environment. Applied Sciences. 2024; 14(17):7638. https://doi.org/10.3390/app14177638
Chicago/Turabian StyleKang, Zhen, Lianhua An, Xiaoguang Yang, and Jintao Lai. 2024. "A Carbon Benefits-Based Signal Control Method in a Connected Environment" Applied Sciences 14, no. 17: 7638. https://doi.org/10.3390/app14177638
APA StyleKang, Z., An, L., Yang, X., & Lai, J. (2024). A Carbon Benefits-Based Signal Control Method in a Connected Environment. Applied Sciences, 14(17), 7638. https://doi.org/10.3390/app14177638