
Simulation Study on the Installation of Helical Anchors in Sandy Soil Using SPH-FEM



Abstract
1. Introduction
2. Establishment of SPH-FEM Model
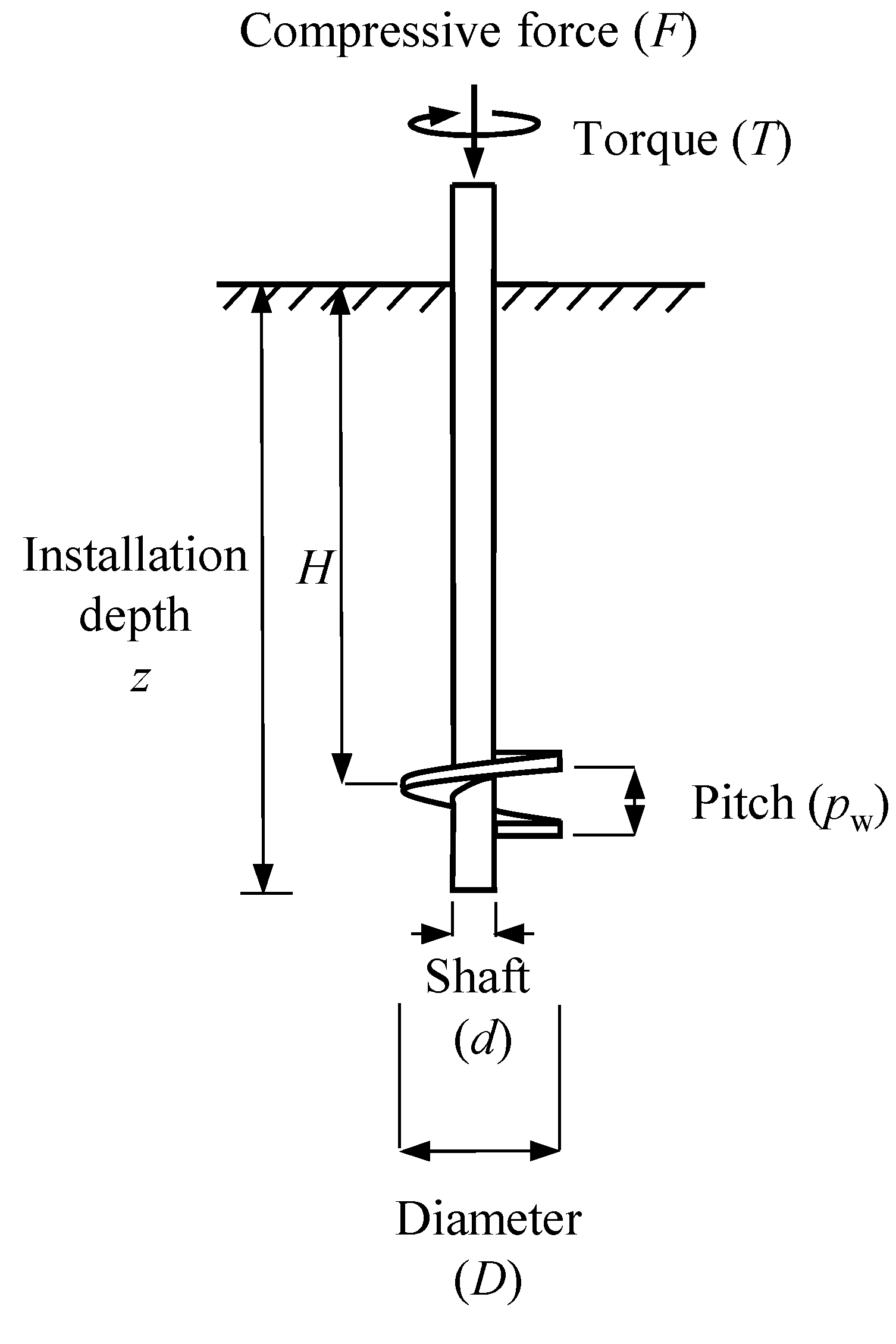
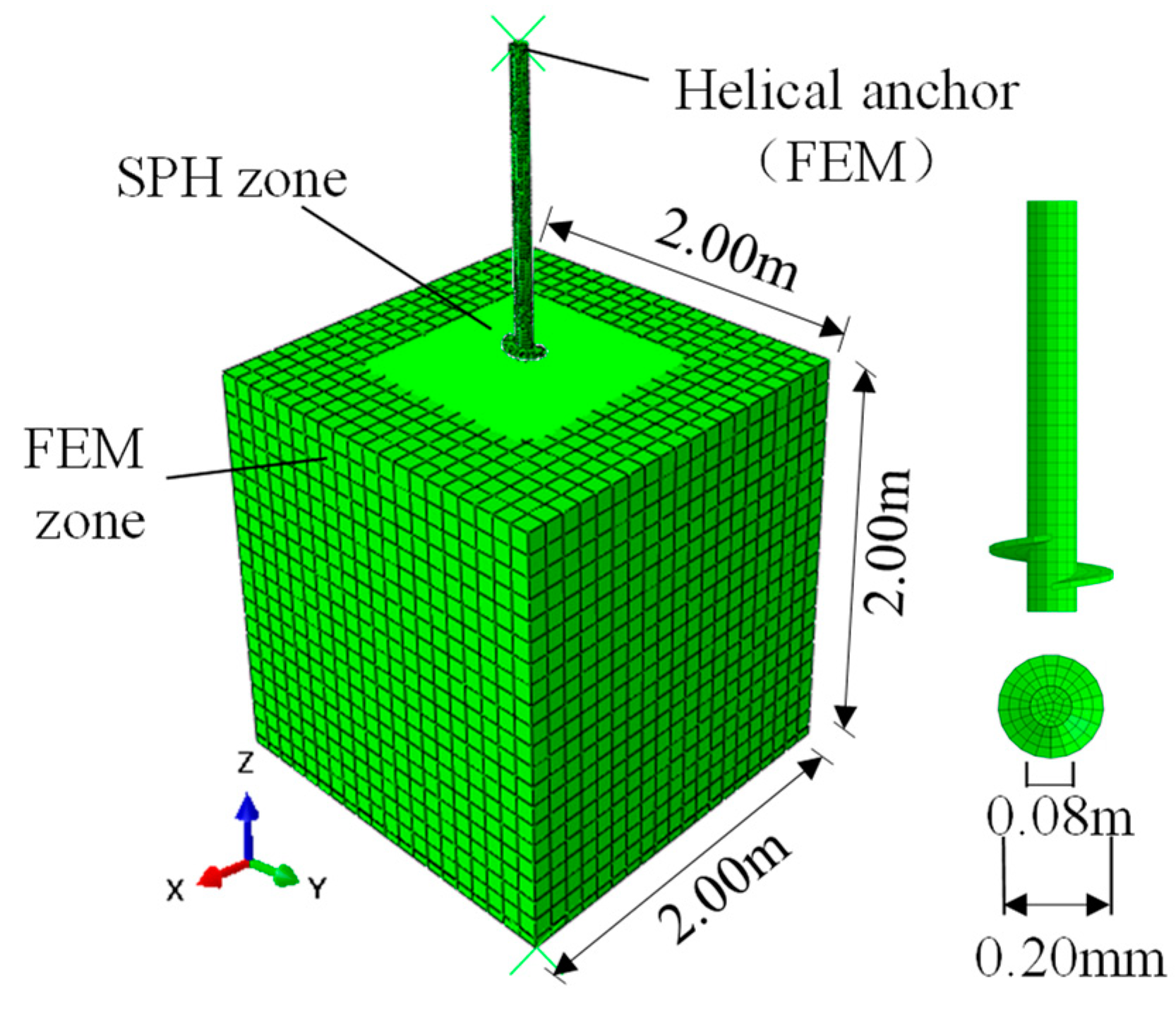
2.1. Computational Model and Material Parameters
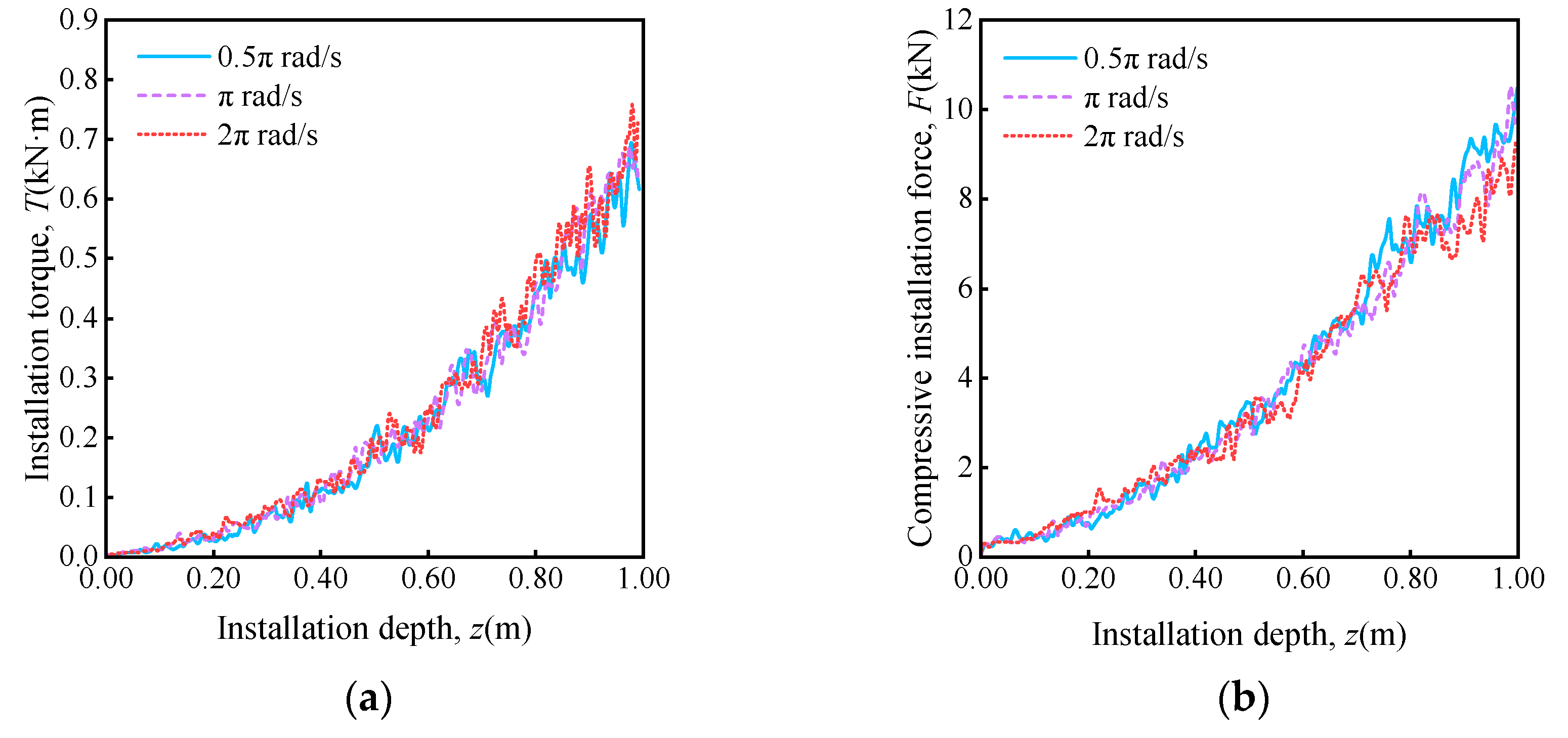
2.2. Initial Boundary Conditions and Sensitivity Analysis of Installation Speed
2.3. Model Verification
3. Simulation Results and Discussion
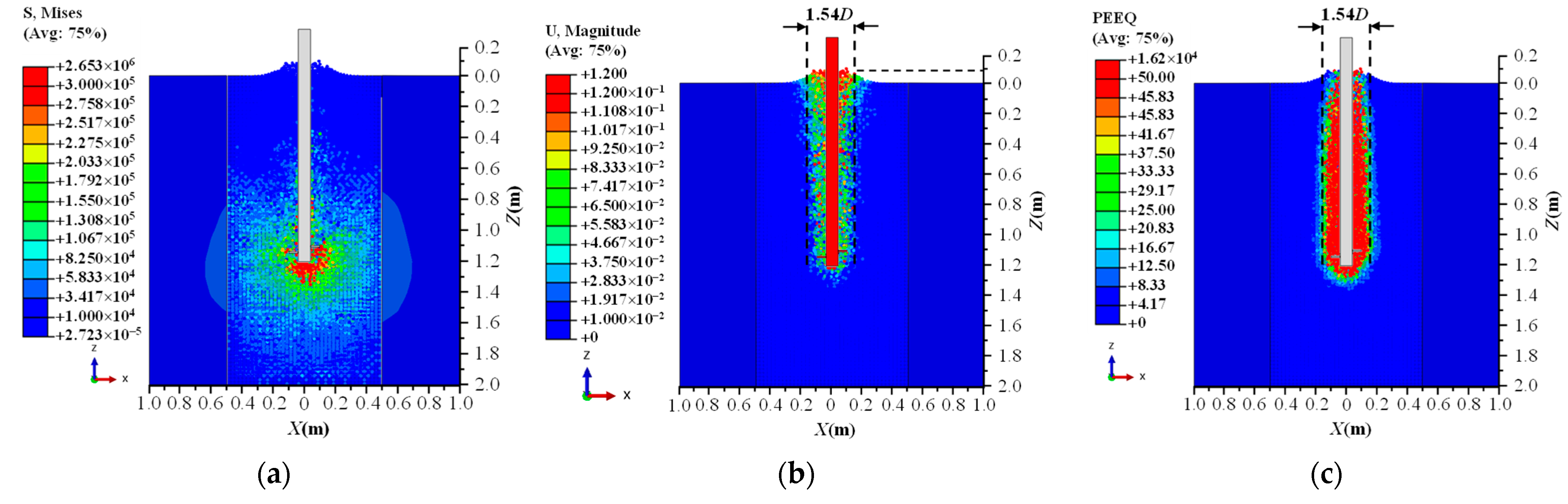
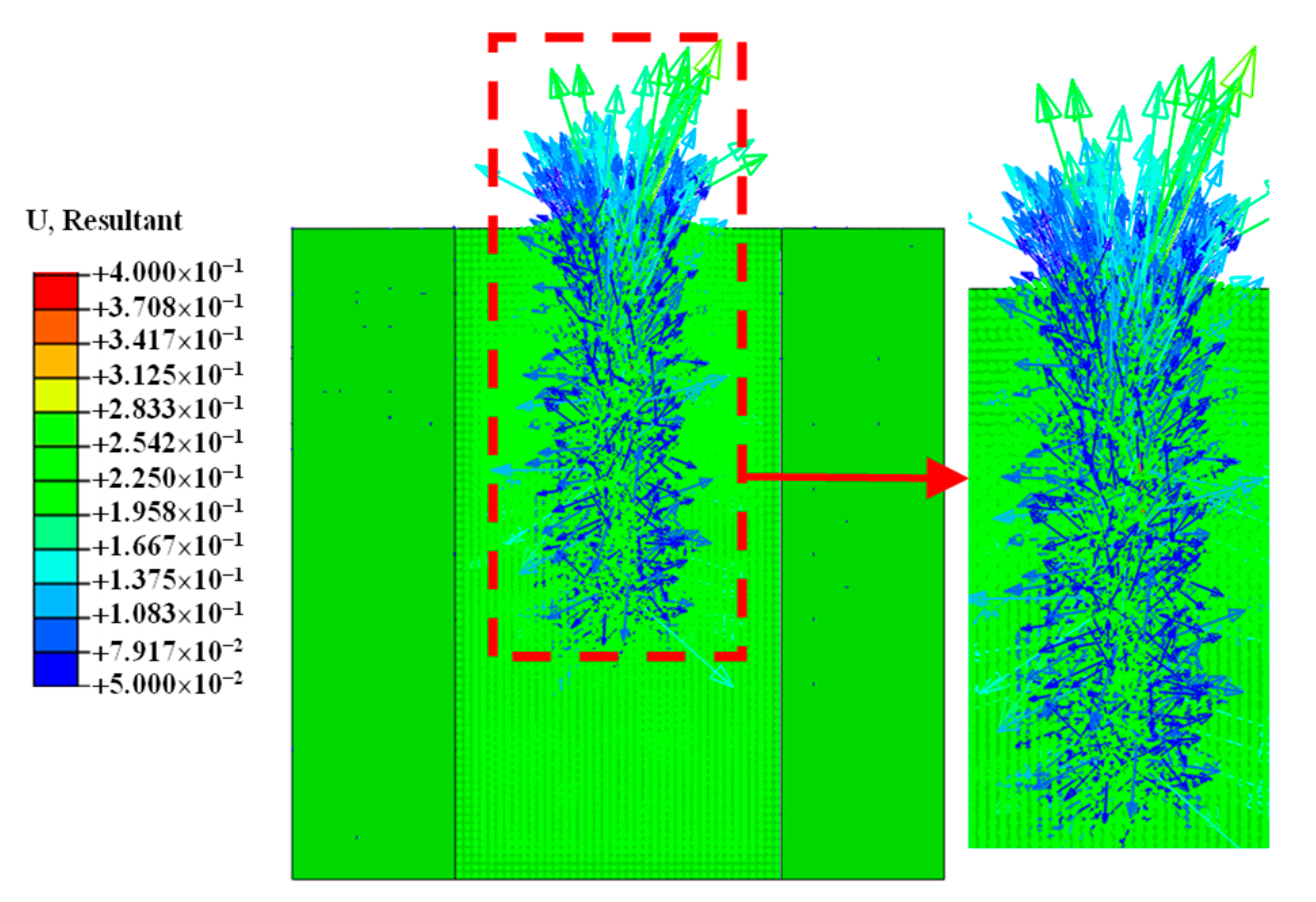
3.1. Disturbance to the Soil by Helical Anchor Installation
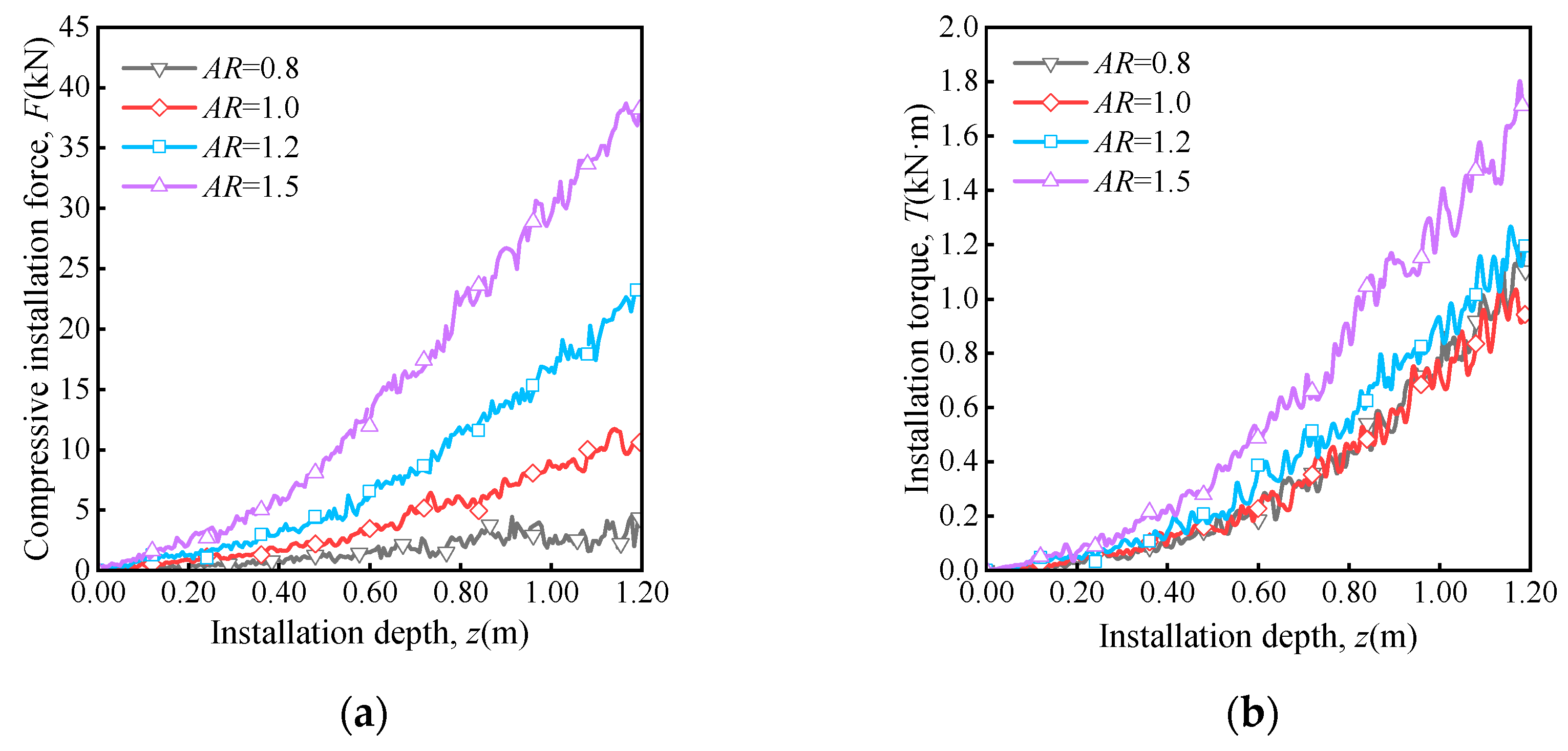
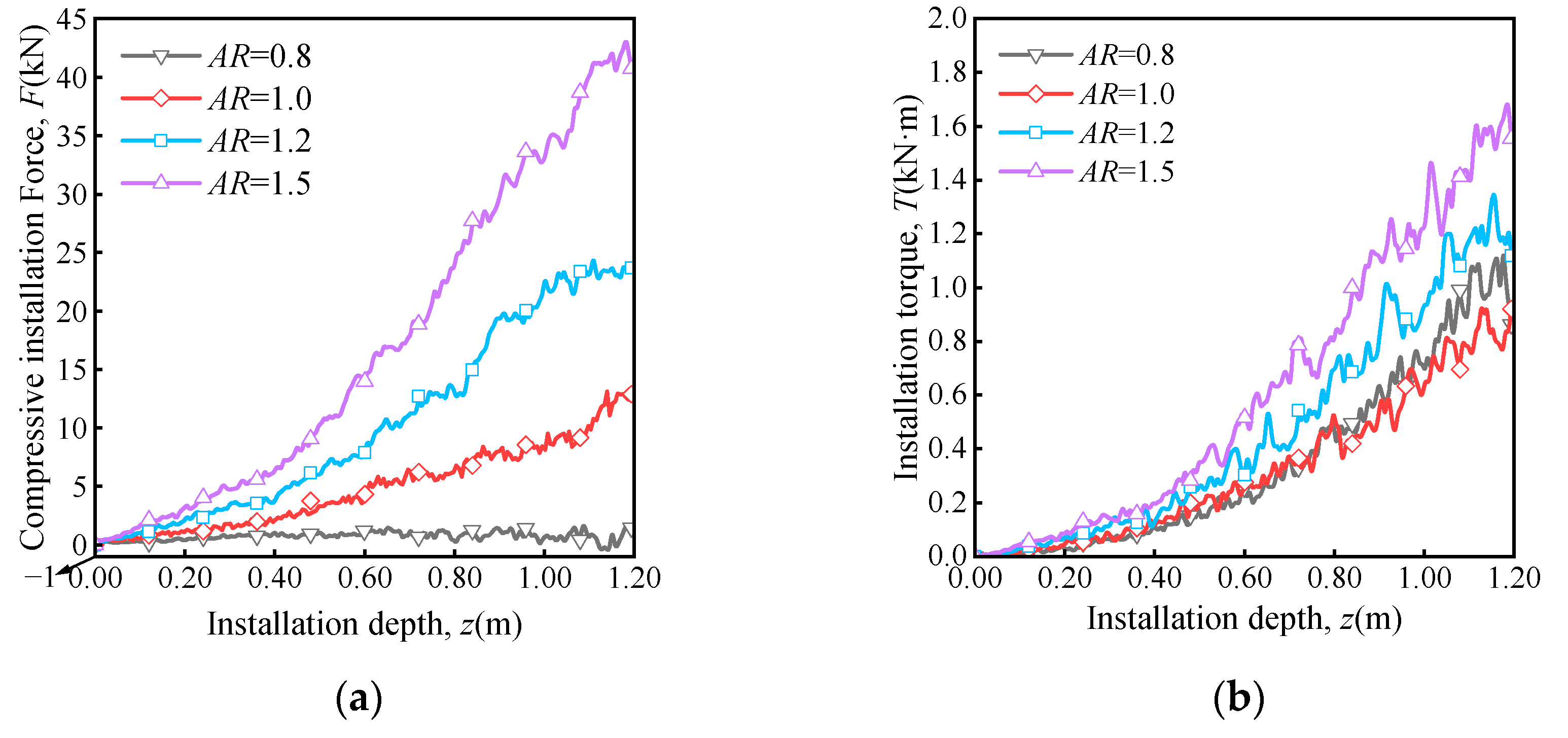
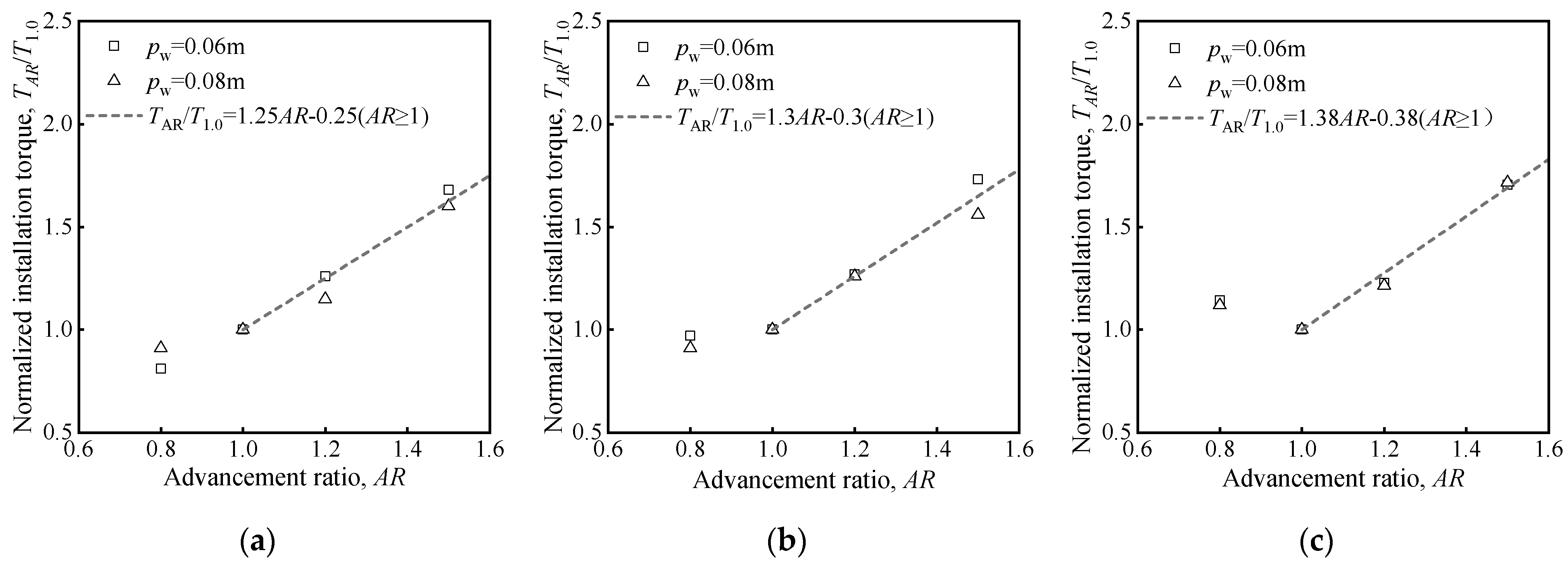
3.2. Influence of AR on Installation Force and Torque
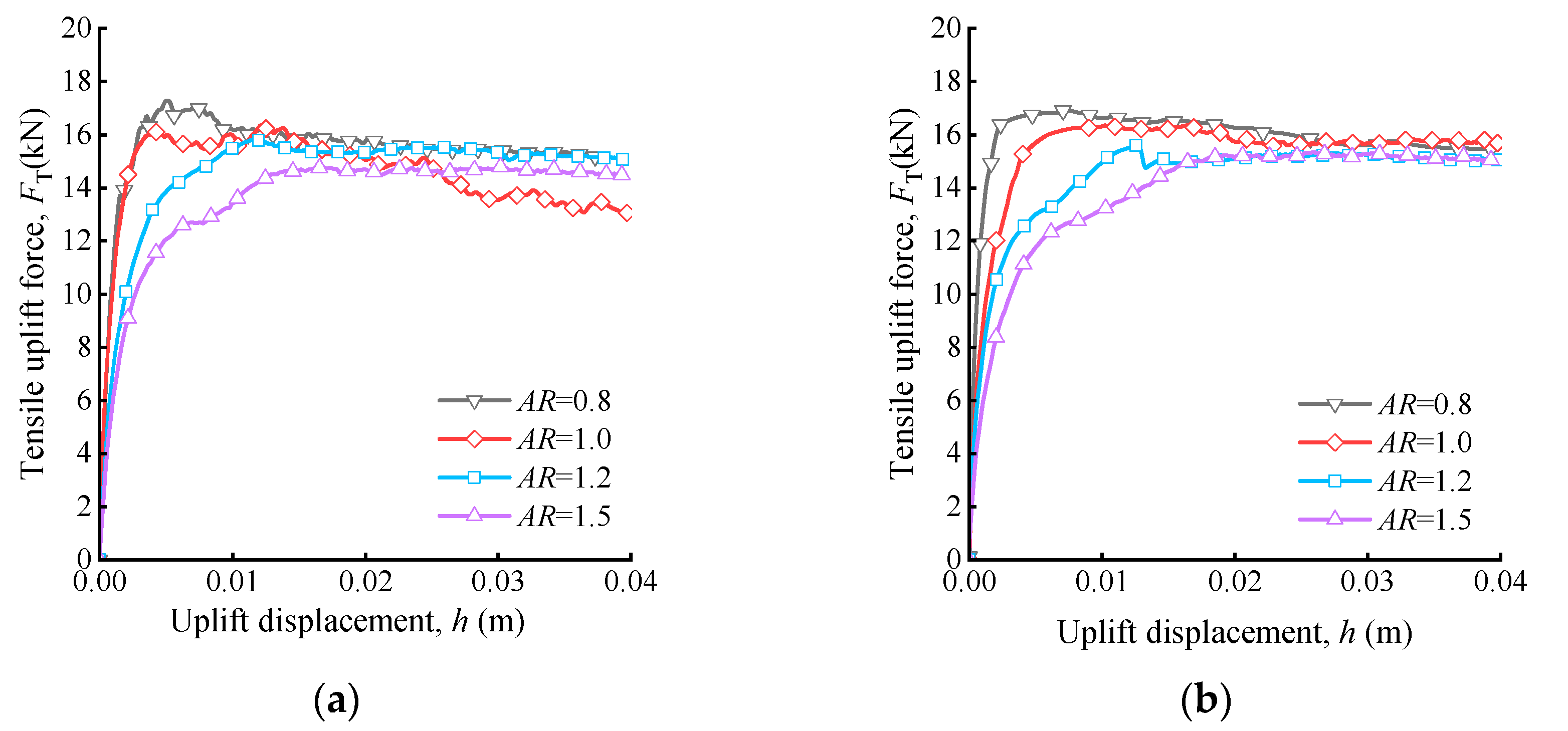
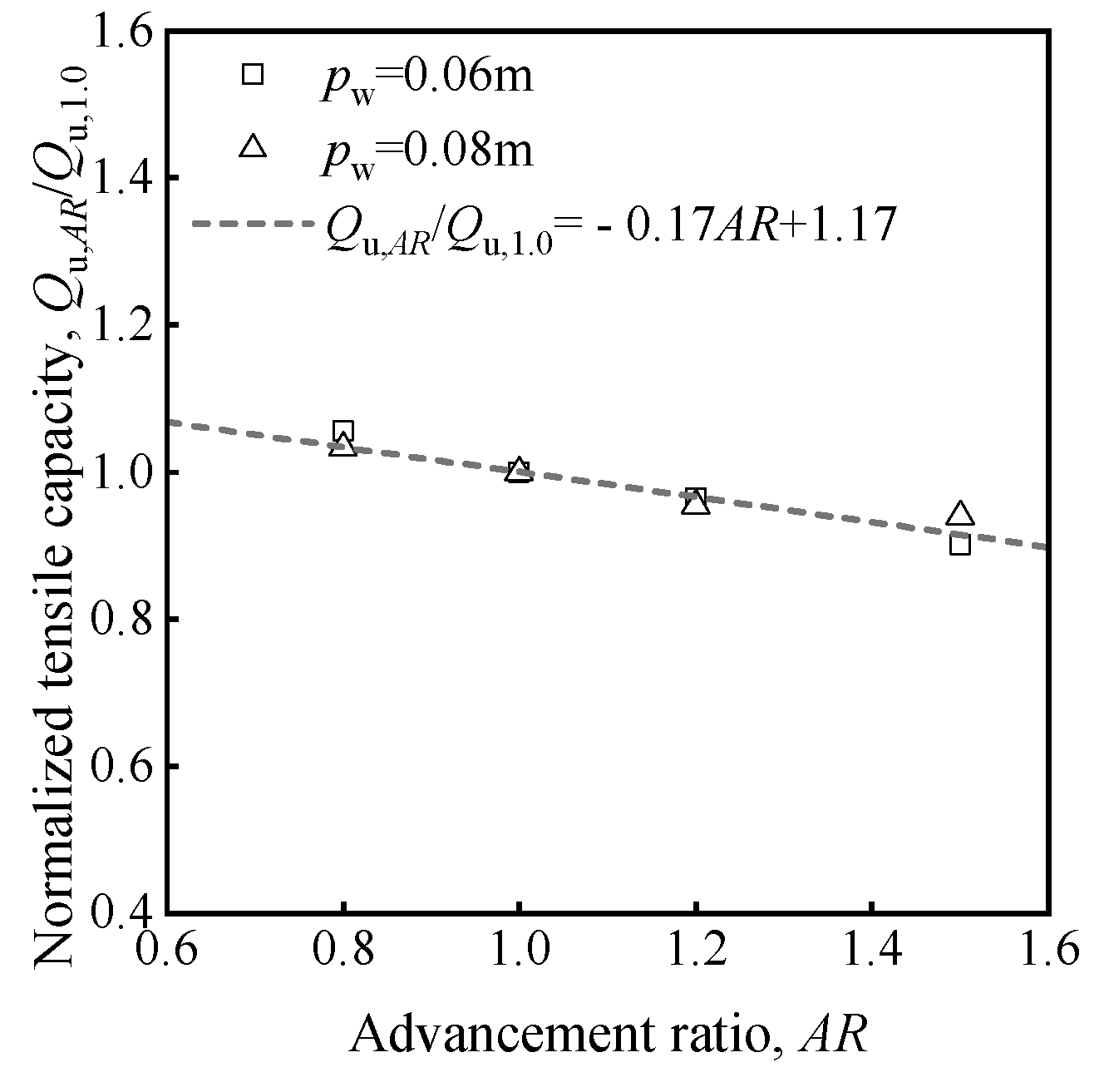
3.3. Influence of AR on the Uplift Bearing Capacity of Helical Anchor Foundations
3.4. Influence of AR on the Torque Correlation Factor Kt
4. Conclusions
- (1)
- The AR significantly influences the installation force and torque of the helical anchor. Compared to the “pitch-matched” (AR = 1.0) installation method, employing a high AR (AR = 1.2, 1.5) results in a significant increase in both installation force and torque, with the force increase being more pronounced than that of the torque. Conversely, using a low AR (AR = 0.8) for installation can significantly reduce the installation force, although the change in installation torque is relatively minor.
- (2)
- The ultimate uplift capacity of the helical anchor foundation is linearly and negatively correlated with the AR. At a low AR (AR = 0.8), the foundation achieves its maximum ultimate uplift capacity, which is approximately 4% higher than that obtained with the “pitch-matched” installation (AR = 1.0).
- (3)
- The AR affects the torque correlation coefficient Kt. The Kt value peaks when using the “pitch-matched” installation (AR = 1.0). Utilizing the Kt value determined at this AR to predict the ultimate uplift capacity of the helical anchor under other AR will likely result in an overestimation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lutenegger, A.J.; Tsuha, C.d.H. Evaluating installation disturbance from helical piles and anchors using compression and tension tests. In From Fundamentals to Applications in Geotechnics; IOS Press: Amsterdam, The Netherlands, 2015; pp. 373–381. [Google Scholar]
- Yu, H.; Zhou, H.; Sheil, B.; Liu, H. Finite element modelling of helical pile installation and its influence on uplift capacity in strain softening clay. Can. Geotech. J. 2022, 59, 2050–2066. [Google Scholar] [CrossRef]
- Annicchini, M.M.; Schiavon, J.A.; Tsuha, C.d.H.C. Effects of installation advancement rate on helical pile helix behavior in very dense sand. Acta Geotech. 2023, 18, 2795–2811. [Google Scholar] [CrossRef]
- Davidson, C.; Brown, M.J.; Cerfontaine, B.; Al-Baghdadi, T.; Knappett, J.; Brennan, A.; Augarde, C.; Coombs, W.; Wang, L.; Blake, A. Physical modelling to demonstrate the feasibility of screw piles for offshore jacket-supported wind energy structures. Géotechnique 2022, 72, 108–126. [Google Scholar] [CrossRef]
- BS 8004:2015; Code of Practice for Foundations. British Standards Institution: London, UK, 2015.
- Perko, H.A. Helical Piles: A Practical Guide to Design and Installation; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Al-Baghdadi, T. Screw Piles as Offshore Foundations: Numerical and Physical Modelling. Doctoral Thesis, University of Dundee, Dundee, UK, 2018. [Google Scholar]
- Ghaly, A.; Hanna, A. Experimental and theoretical studies on installation torque of screw anchors. Can. Geotech. J. 1991, 28, 353–364. [Google Scholar] [CrossRef]
- Shi, D.; Yang, Y.; Deng, Y.; Liu, W. Experimental study of the effect of drilling velocity ratio on the behavior of auger piling in sand. Rock Soil Mech. 2018, 39, 1981–1990. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, P.; Ding, H.; Tian, Y.; Qi, X. The uplift capacity of single-plate helical pile in shallow dense sand including the influence of installation. Mar. Struct. 2020, 71, 102697. [Google Scholar] [CrossRef]
- Sharif, Y.U.; Brown, M.J.; Cerfontaine, B.; Davidson, C.; Ciantia, M.O.; Knappett, J.A.; Ball, J.D.; Brennan, A.; Augarde, C.; Coombs, W. Effects of screw pile installation on installation requirements and in-service performance using the discrete element method. Can. Geotech. J. 2021, 58, 1334–1350. [Google Scholar] [CrossRef]
- He, H.; Karsai, A.; Liu, B.; Hammond III, F.L.; Goldman, D.I.; Arson, C. Simulation of compound anchor intrusion in dry sand by a hybrid FEM+ SPH method. Comput. Geotech. 2023, 154, 105137. [Google Scholar] [CrossRef]
- Nagai, H.; Tsuchiya, T.; Shimada, M. Influence of installation method on performance of screwed pile and evaluation of pulling resistance. Soils Found. 2018, 58, 355–369. [Google Scholar] [CrossRef]
- Ghaly, A.; Hanna, A.; Hanna, M. Uplift behavior of screw anchors in sand. I: Dry sand. J. Geotech. Eng. 1991, 117, 773–793. [Google Scholar] [CrossRef]
- Perez, Z.A.; Schiavon, J.A.; Tsuha, C.d.H.C.; Dias, D.; Thorel, L. Numerical and experimental study on influence of installation effects on behaviour of helical anchors in very dense sand. Can. Geotech. J. 2018, 55, 1067–1080. [Google Scholar] [CrossRef]
- Hoyt, R. Uplift capacity of helical anchors in soil. In Proceedings of the 12th International Conference on Soil Mechanics and Foundation Engineering, Rio De Janeiro, Brazil, 13–18 August 1989; pp. 1019–1022. [Google Scholar]
- da Silva, B.O.; Hollanda Cavalcanti Tsuha, C.; Beck, A.T. A procedure to estimate the installation torque of multi-helix piles in clayey sand using SPT data. Int. J. Civ. Eng. 2021, 19, 1357–1368. [Google Scholar] [CrossRef]
- Tsuha, C.d.H.C.; Aoki, N. Relationship between installation torque and uplift capacity of deep helical piles in sand. Can. Geotech. J. 2010, 47, 635–647. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Type | Young’s Modulus E (MPa) | Poisson’s Ratio ν (-) | Internal Friction Angle φ (°) | Dilatancy Angle ψ (°) | Density ρ (kg/m3) |
|---|---|---|---|---|---|
| Helical Anchor | 2.06 × 105 | 0.30 | - | - | 7.85 × 103 |
| Soil | 60.00 | 0.25 | 37.00 | 7.00 | 1.69 × 103 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, H.; Yuan, C.; Zheng, H. Simulation Study on the Installation of Helical Anchors in Sandy Soil Using SPH-FEM. Appl. Sci. 2024, 14, 7672. https://doi.org/10.3390/app14177672
Hu H, Yuan C, Zheng H. Simulation Study on the Installation of Helical Anchors in Sandy Soil Using SPH-FEM. Applied Sciences. 2024; 14(17):7672. https://doi.org/10.3390/app14177672
Chicago/Turabian StyleHu, Haiyang, Chi Yuan, and Hong Zheng. 2024. "Simulation Study on the Installation of Helical Anchors in Sandy Soil Using SPH-FEM" Applied Sciences 14, no. 17: 7672. https://doi.org/10.3390/app14177672
APA StyleHu, H., Yuan, C., & Zheng, H. (2024). Simulation Study on the Installation of Helical Anchors in Sandy Soil Using SPH-FEM. Applied Sciences, 14(17), 7672. https://doi.org/10.3390/app14177672