
Research on Ride Comfort Control of Air Suspension Based on Genetic Algorithm Optimized Fuzzy PID

Abstract
:1. Introduction
2. Dynamic Modeling of Air Suspension Systems
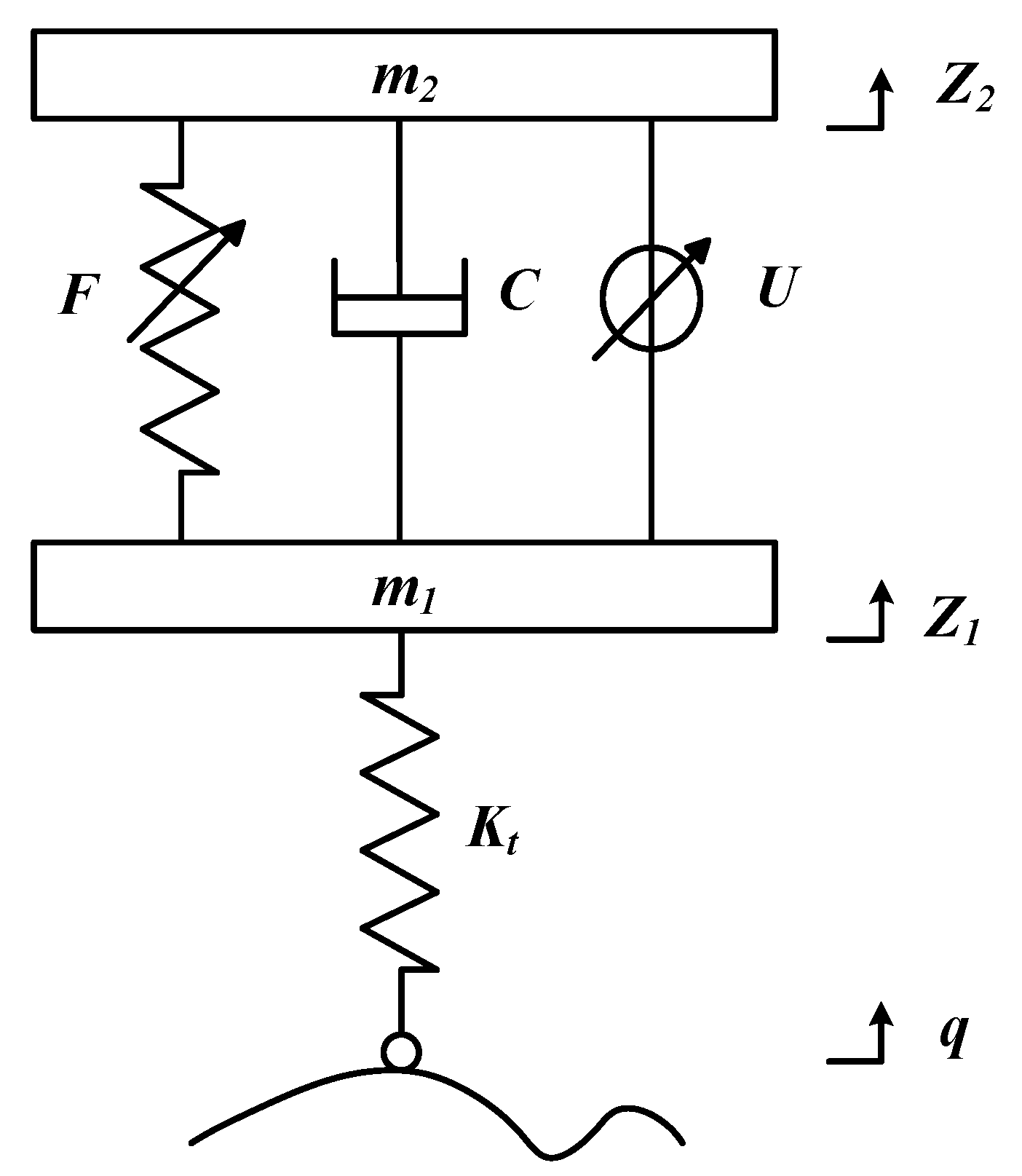
2.1. Vehicle Model Construction
- (1)
- During vehicle operation, the road surface unevenness excitation experienced by the left and right tires is identical;
- (2)
- The effects of the engine, steering, and drivetrain systems on vibrations are neglected in the modeling process;
- (3)
- The damping of the tires is significantly less than that of the suspension dampers; hence, only the stiffness of the tires is considered, and tire damping is ignored in the modeling;
- (4)
- The time delay effect of the suspension is neglected in the modeling.
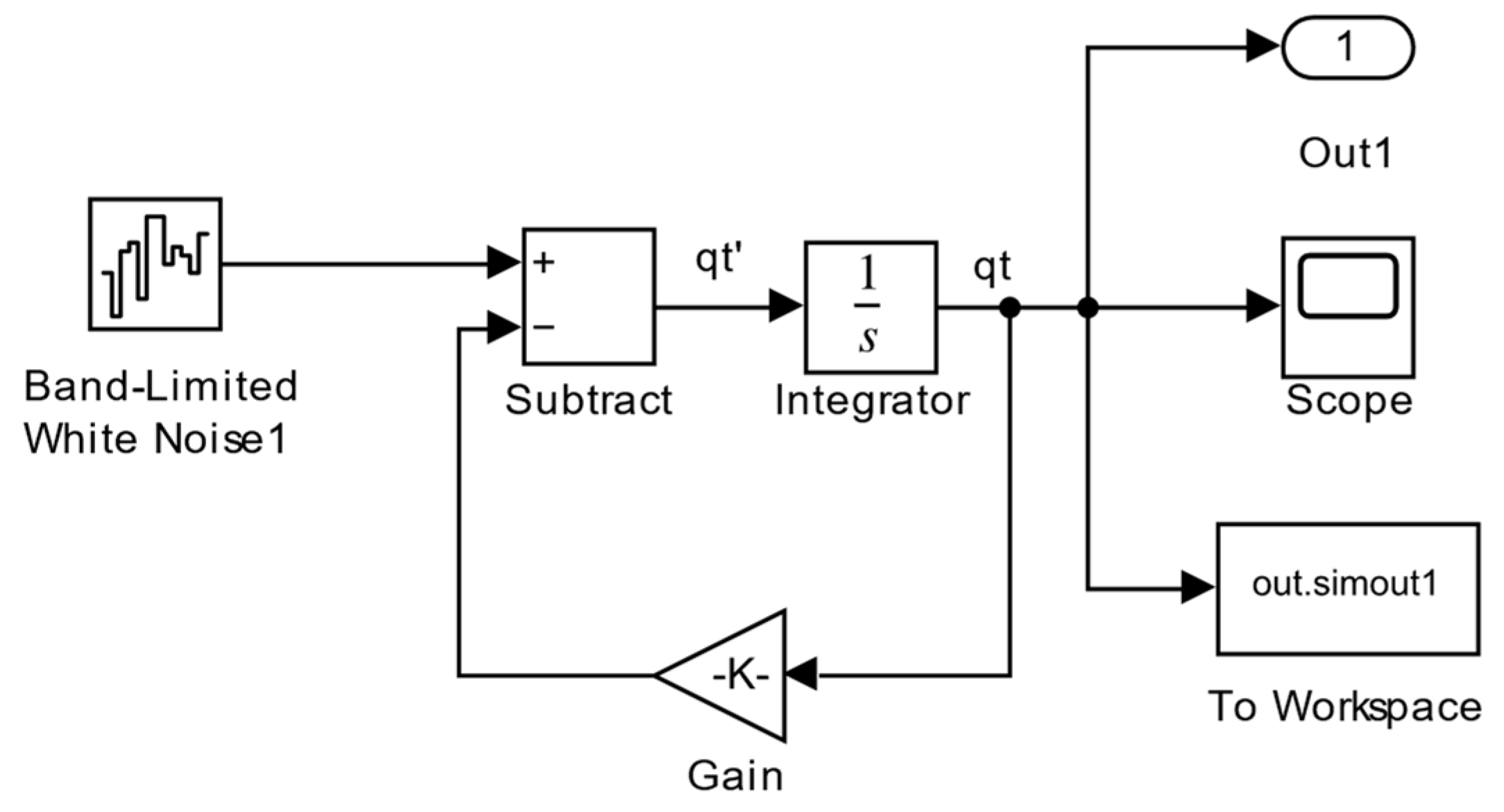
2.2. Road Input Model
2.3. Selection of Simulation Parameters
3. Control Algorithm
3.1. PID Controller
3.2. Fuzzy PID Controller
3.2.1. Input and Output of Fuzzy Controller
3.2.2. Selection of Input and Output Variable Domains
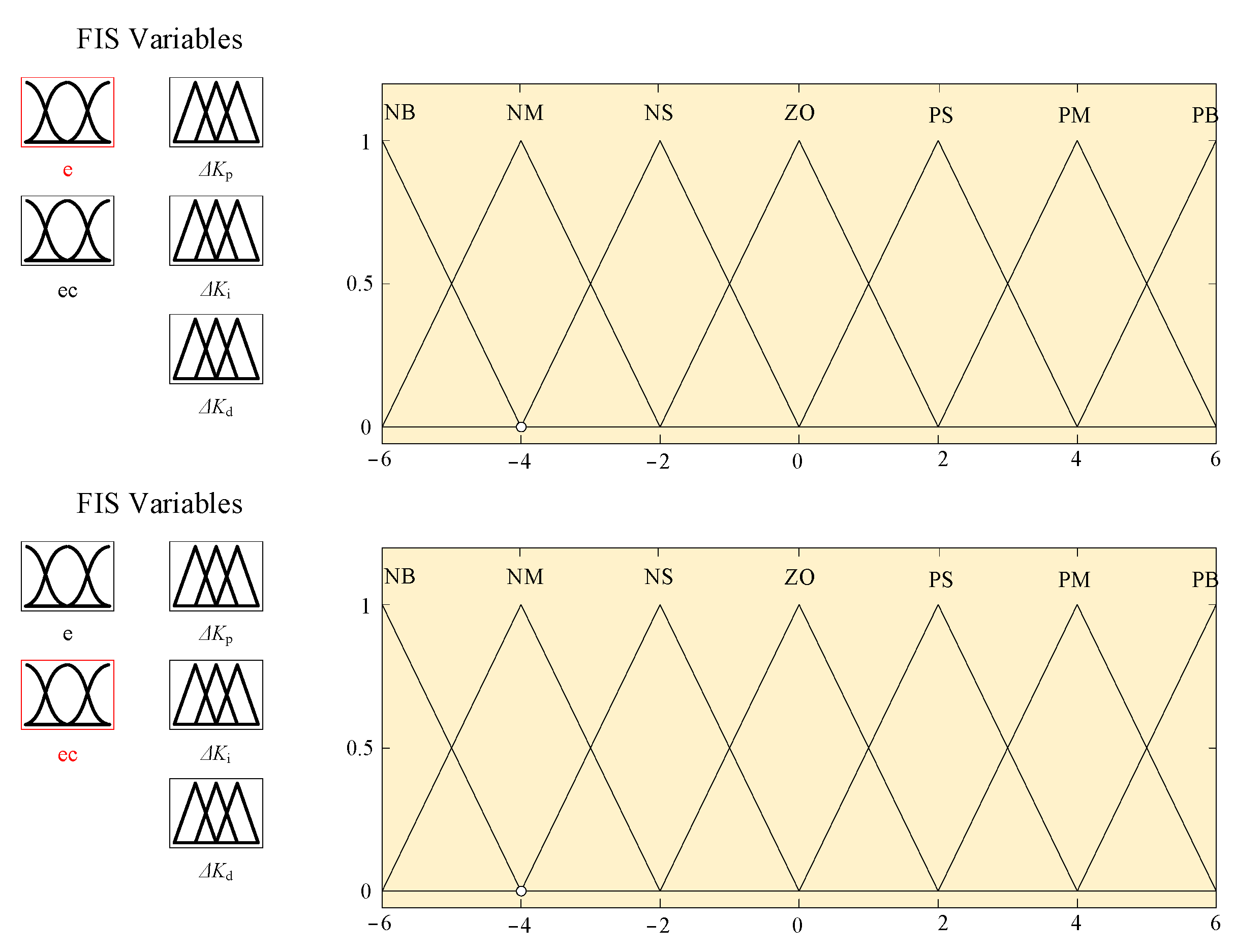
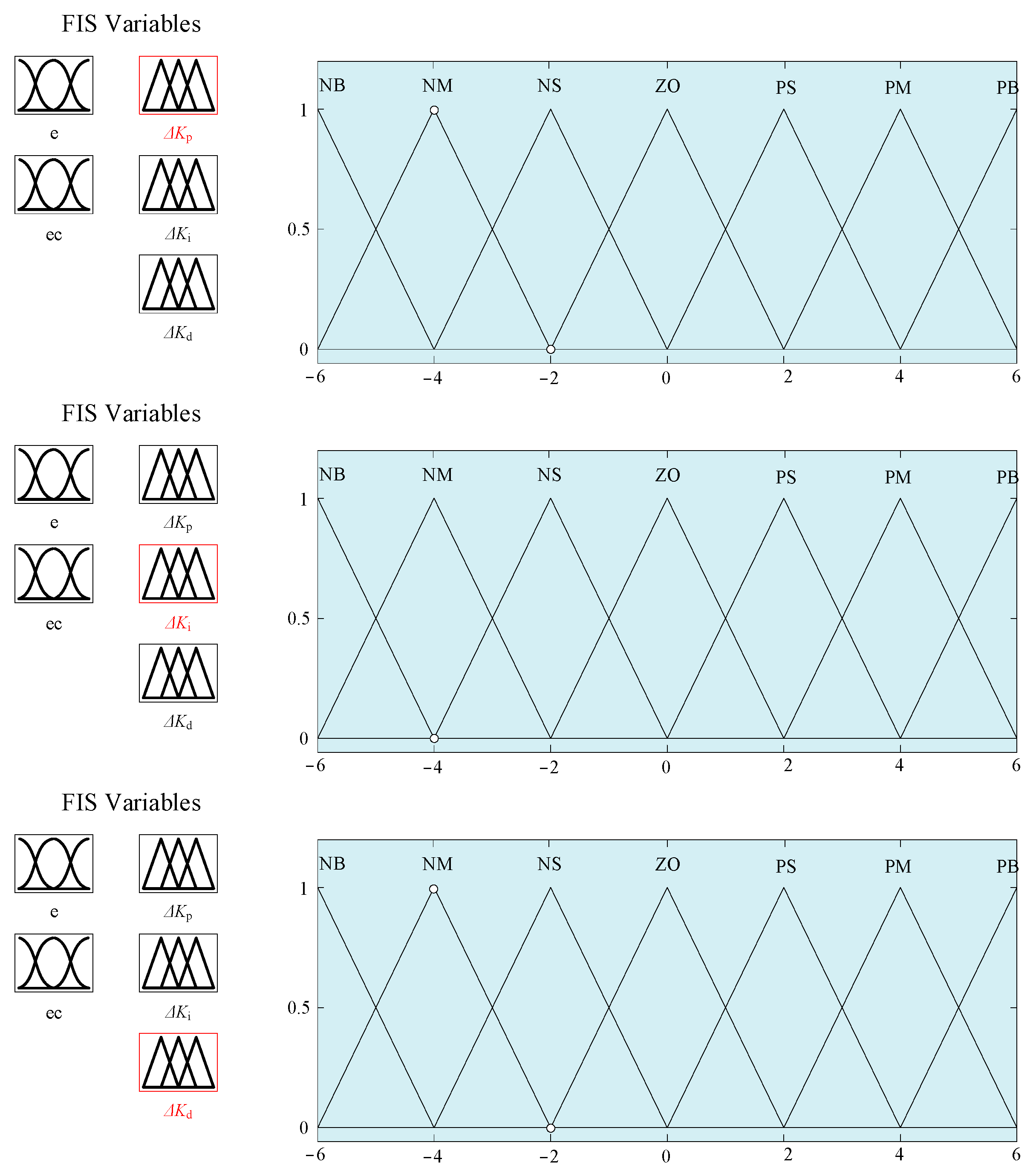
3.2.3. Membership Functions of Fuzzy Variables
3.2.4. Establishment of Fuzzy Control Rules
- (1)
- When |e| undergoes significant changes, choose a larger ∆Kp and smaller ∆Ki, ∆Kd to ensure system stability and effectively control the instantaneous deviation;
- (2)
- If there are no significant changes in |e| and |ec|, reduce ∆Kp appropriately and select suitable ∆Ki, ∆Kd based on system requirements to ensure minimal overshoot and effectively reduce system response time;
- (3)
- When |e| changes minimally, increase the values of ∆Kp and ∆Ki, adjusting ∆Kd based on the variation in |ec|. For small |ec|, choose a larger ∆Kd; for large |ec|, choose a smaller ∆Kd;
- (4)
- When e and ec change in the same direction, indicating an increasing error trend, increase ∆Kp; conversely, decrease ∆Kp.
3.3. GA F-PID Controller
3.3.1. Selection of Objective Function
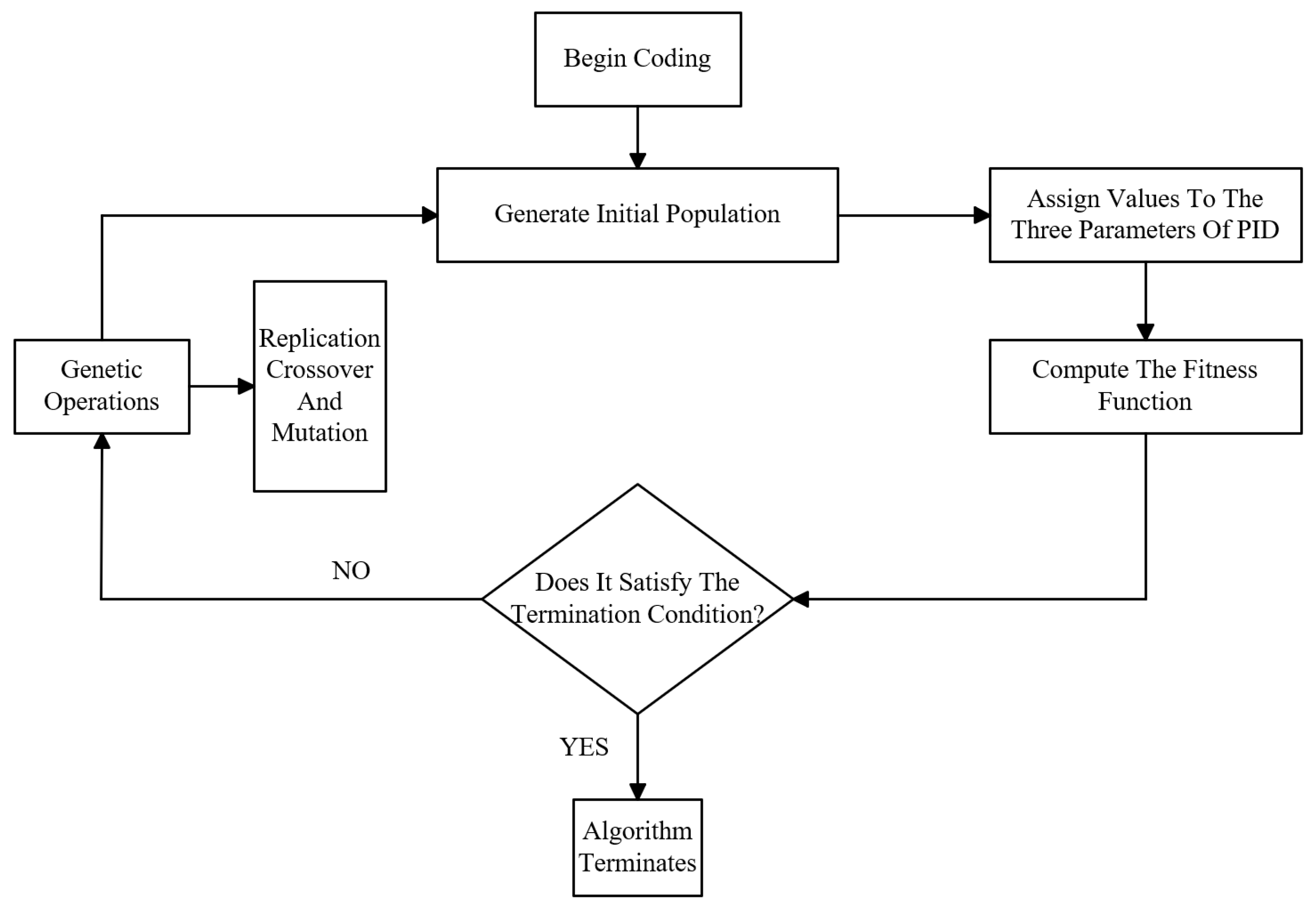
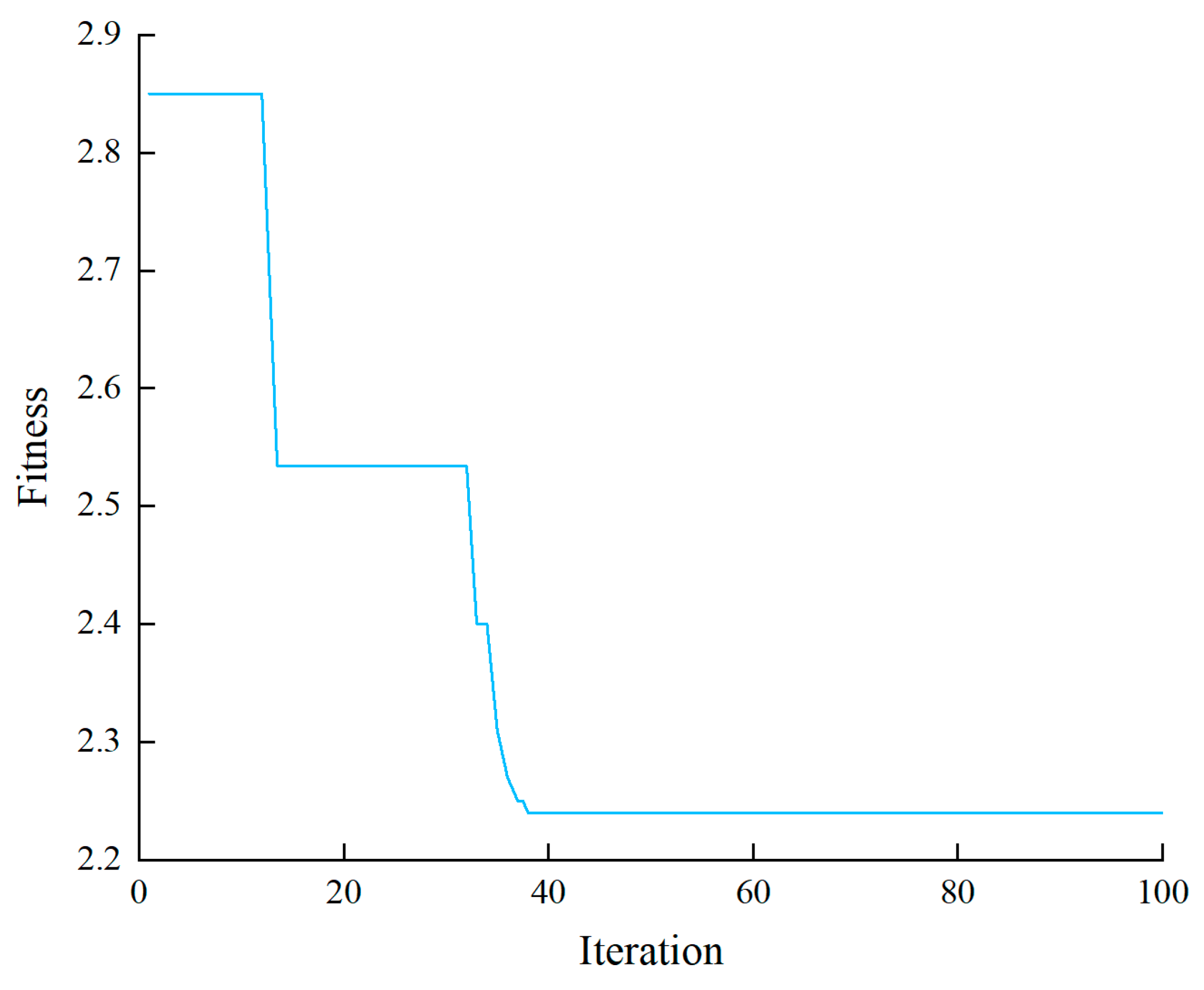
3.3.2. Controller GA Optimization Algorithm
4. Experimental Research
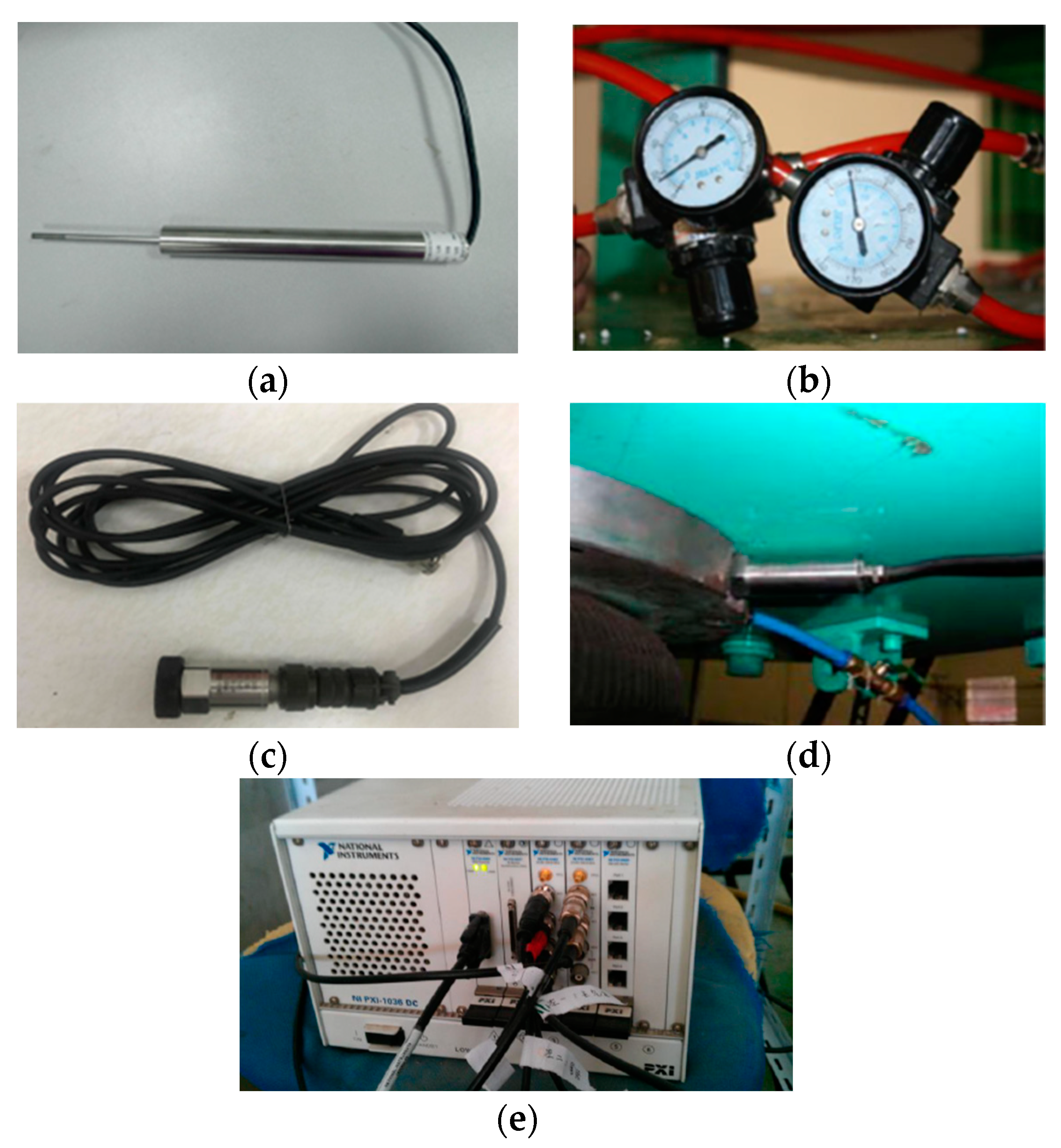
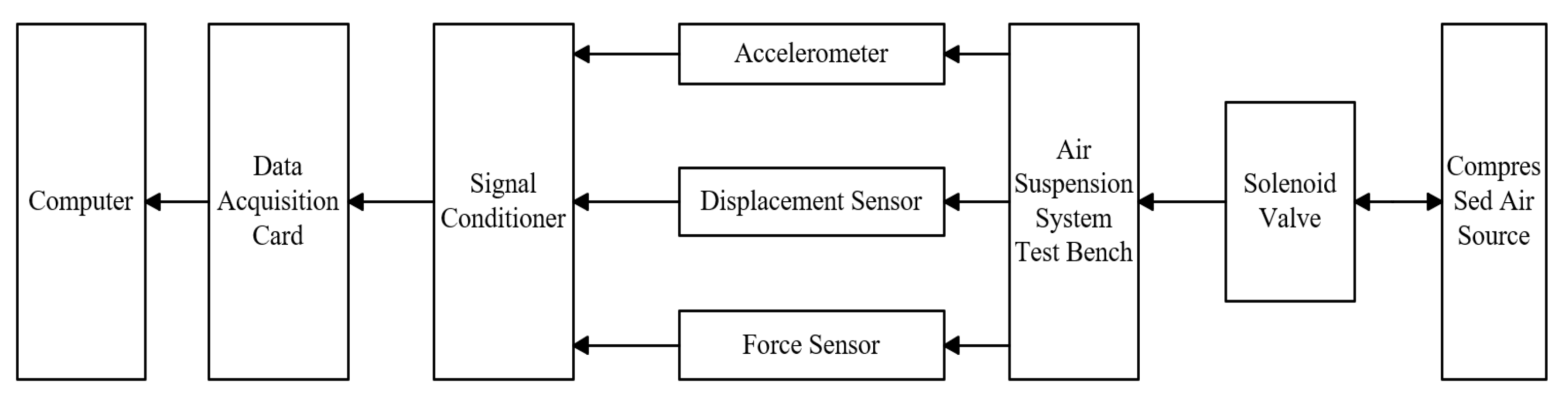
4.1. Air Suspension System Bench Test
4.2. Model Validation
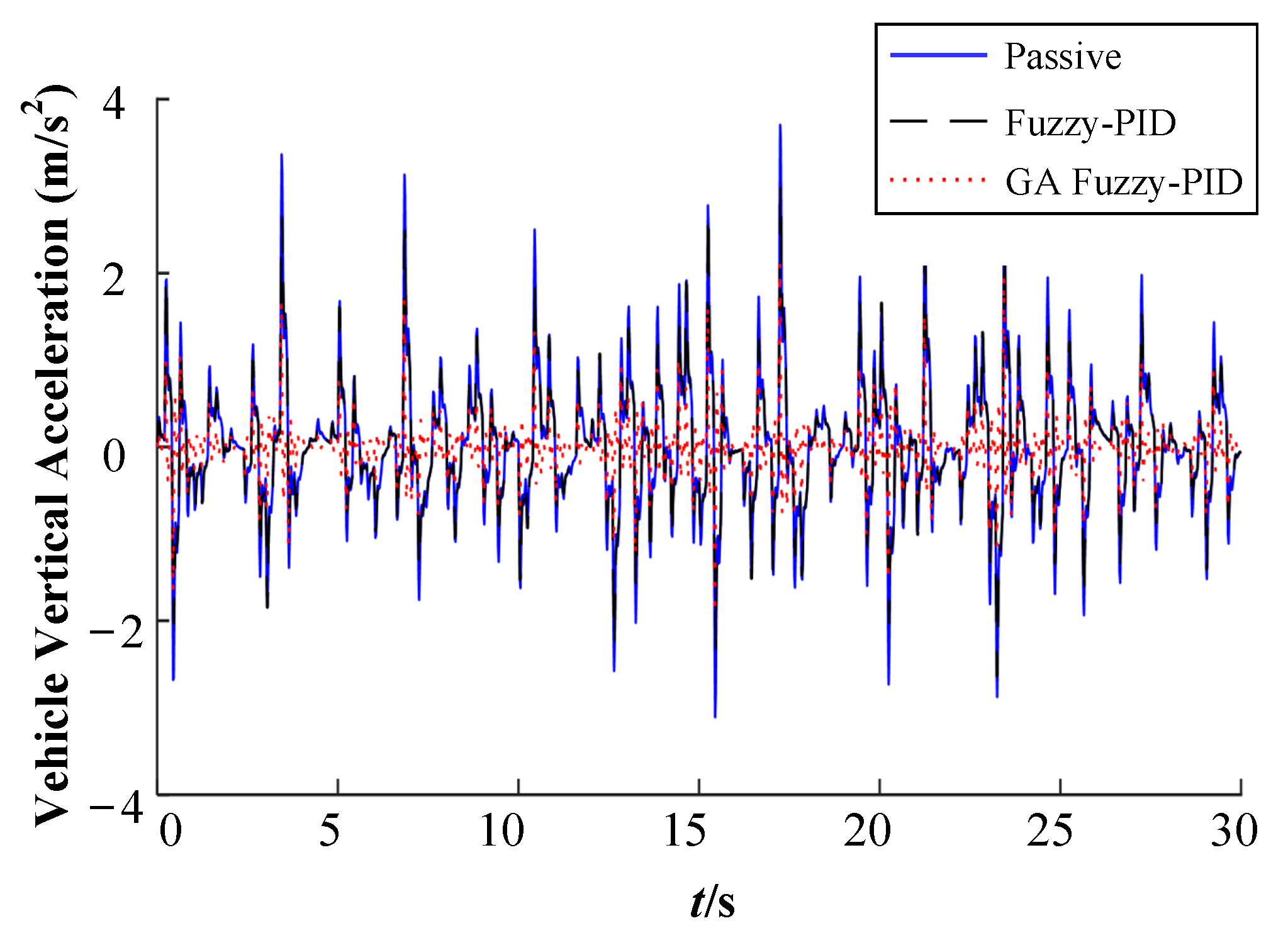
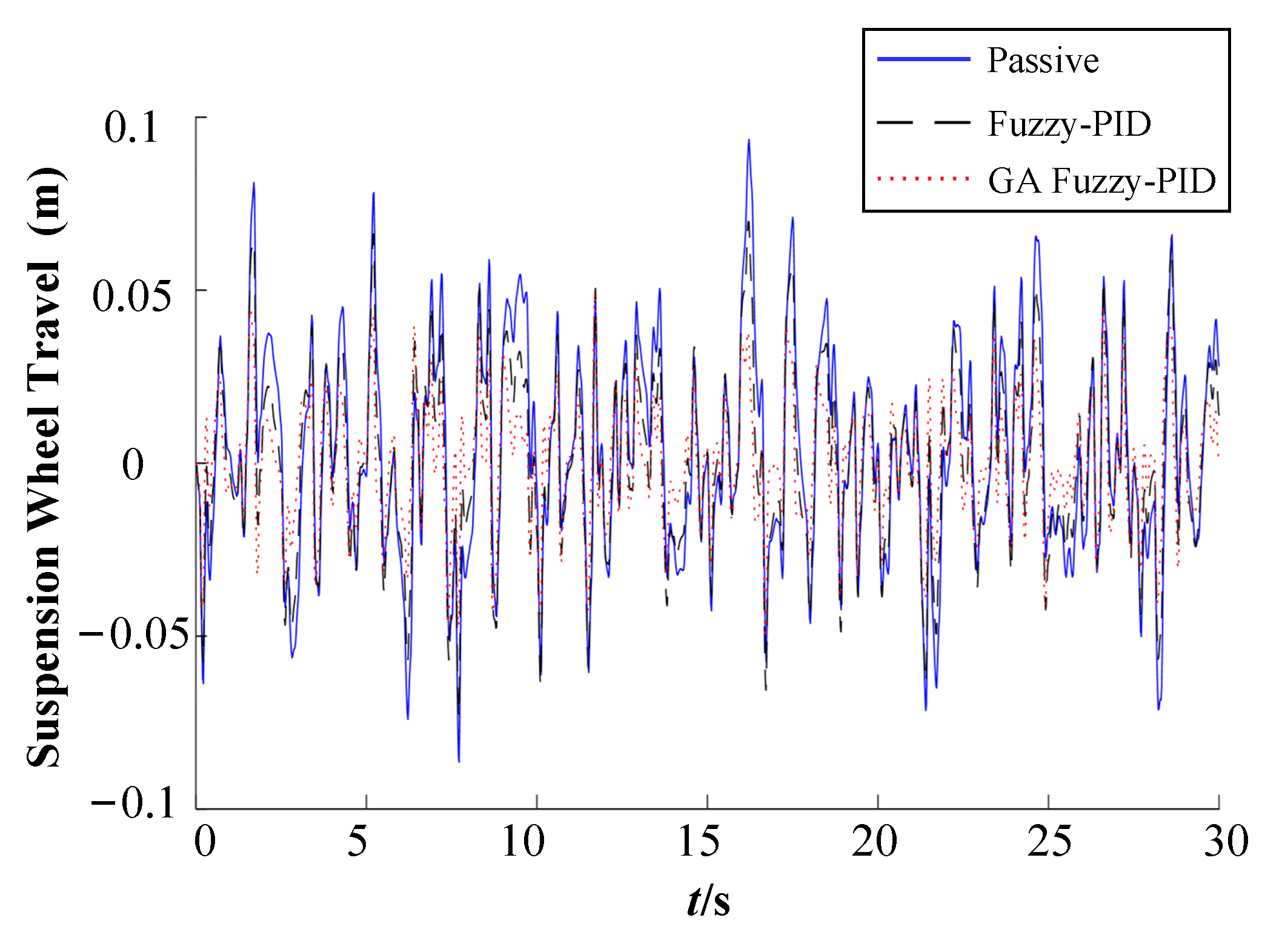
5. Simulation Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ming, M. Intelligent Manufacturing Technology of New Energy Vehicle Lightweight Chassis Suspension System. Mach. Build. Autom. 2021, 50, 224–226. [Google Scholar]
- Chao, L.Y. Suspension System Optimization and Study on Control of the Electric Vehicle. Master’s Thesis, Qingdao University of Science, Qingdao, China, 2018. [Google Scholar]
- Lei, S.S. Research on Control Strategy of Charging and Deflating Characteristics of Electronically Controlled Active Air Suspension. Master’s Thesis, Taiyuan University of Technology, Taiyuan, China, 2019. [Google Scholar]
- Rui, B. Nonlinear adaptive sliding-mode control of the electronically controlled air suspension system. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419881527. [Google Scholar] [CrossRef]
- Nazemian, H.; Masih-Tehrani, M. Hybrid Fuzzy-PID Control Development for a Truck Air Suspension System. SAE Int. J. Commer. Veh. 2020, 13, 55–69. [Google Scholar] [CrossRef]
- Li, H.; Li, S.; Sun, W.; Wang, L.; Lv, D. The optimum matching control and dynamic analysis for air suspension of multi-axle vehicles with anti-roll hydraulically interconnected system. Mech. Syst. Signal Process. 2020, 139, 106605. [Google Scholar] [CrossRef]
- Nguyen, V.; Jiao, R.; Zhang, J. Control Performance of Damping and Air Spring of Heavy Truck Air Suspension System with Optimal Fuzzy Control. SAE Int. J. Veh. Dyn. Stab. NVH 2020, 4, 179–194. [Google Scholar] [CrossRef]
- Prassad, S.G.; Malar Mohan, K. A contemporary adaptive air suspension using LQR control for passenger vehicles. ISA Trans. 2019, 93, 244–254. [Google Scholar]
- Chen, Y.; Zhang, S.; Mao, E.; Du, Y.; Chen, J.; Yang, S. Height stability control of a large sprayer body based on air suspension using the sliding mode approach. Inf. Process. Agric. 2020, 7, 20–29. [Google Scholar] [CrossRef]
- Ma, X.F.; Li, K. The Simulation of Air Suspension System Based on PID Control Strategy. Autmobile Appl. Technol. 2017, 8, 142–145. [Google Scholar] [CrossRef]
- Anh, N.T. Control an active suspension system by using PID and LQR controller. Int. J. Mech. Prod. Eng. Res. Dev. 2020, 10, 7003–7012. [Google Scholar]
- Ab Talib, M.H.; Mat Darus, I.Z.; Mohd Samin, P.; Mohd Yatim, H.; Ardani, M.I.; Shaharuddin, N.M.; Hadi, M.S. Vibration control of semi-active suspension system using PID controller with advanced firefly algorithm and particle swarm optimization. J. Ambient. Intell. Humaniz. Comput. 2021, 12, 1119–1137. [Google Scholar] [CrossRef]
- Tian, M.; Nguyen, V. Control performance of suspension system of cars with PID control based on 3D dynamic model. Journal of Mechanical Engineering. Autom. Control. Syst. 2020, 1, 1–10. [Google Scholar]
- Shafiei, B. A Review on PID Control System Simulation of the Active Suspension System of a Quarter Car Model While Hitting Road Bumps. J. Inst. Eng. (India) Ser. C 2022, 103, 1001–1011. [Google Scholar] [CrossRef]
- Han, S.Y.; Dong, J.F.; Zhou, J.; Chen, Y.H. Adaptive fuzzy PID control strategy for vehicle active suspension based on road evaluation. Electronics 2022, 11, 921. [Google Scholar] [CrossRef]
- Bashir, A.O.; Rui, X.; Zhang, J. Ride comfort improvement of a semi-active vehicle suspension based on hybrid fuzzy and fuzzy-PID controller. Stud. Inform. Control 2019, 28, 421–430. [Google Scholar] [CrossRef]
- Zhang, P.; Yue, H.; Shi, Z.; Lin, J.; Chen, Z. A fuzzy pid algorithm-based attitude control method of suspension-type small rail vehicles. J. Vib. Eng. Technol. 2022, 10, 111–130. [Google Scholar] [CrossRef]
- Ilesanmi, D.; Khumbulani, M.; Adefemi, A.; Kazeem, B. The use of adaptive fuzzy-PID for vibration control in the suspension system of a railcar. In Proceedings of the 2020 IEEE 11th International Conference on Mechanical and Intelligent Manufacturing Technologies (ICMIMT), Cape Town, South Africa, 20–22 January 2020; pp. 130–134. [Google Scholar]
- Chen, G.; Lv, S.; Dai, J. Study on PID control of vehicle semi-active suspension based on genetic algorithm. Int. J. Innov. Comput. Inf. Control 2019, 15, 1093–1114. [Google Scholar]
- Wang, Y.; Chen, K.; Dong, M. Research on active suspension system of heavy commercial vehicle controlled by PID controller based on genetic algorithm. In Advances in Precision Instruments and Optical Engineering, Proceedings of the International Conference on Precision Instruments and Optical Engineering, Guangzhou, China, 20–22 August 2021; Springer Nature: Singapore, 2022; pp. 555–566. [Google Scholar]
- Mudduluru, S.R.; Chizari, M. Quarter and full car models optimisation of passive and active suspension system using genetic algorithm. arXiv 2021, arXiv:2101.12629. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control; Springer: New York, NY, USA, 2011. [Google Scholar]
- GB 7031-1987; Vehicle Vibration Input—Road Flatness Representation. China Standard Press: Beijing, China, 1987.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Notation | Value |
|---|---|---|
| Sprung mass | m2/kg | 500 |
| Unsprung mass | m1/kg | 50 |
| Suspension damping | c/N·s·m−1 | 1700 |
| Tire stiffness | kt/N·m−1 | 200,000 |
| Parameters | Rise Time | Overshoot | Setting Time | Steady-State Error |
|---|---|---|---|---|
| Kp | Decrease | Increase | Slight Change | Decrease |
| Ki | Decrease | Increase | Increase | Eliminate |
| Kd | Slight Change | Decrease | Decrease | Slight Change |
| e | ec | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PB | PB | PM | PM | PS | ZO | ZO |
| NM | PB | PB | PM | PS | PS | ZO | NS |
| NS | PM | PM | PM | PS | ZO | NS | NS |
| ZO | PM | PM | PS | ZO | NS | NM | NM |
| PS | PS | PS | ZO | NS | NS | NM | NM |
| PM | PS | ZO | NS | NM | NM | NM | NB |
| PB | ZO | ZO | NM | NM | NM | NB | NB |
| e | ec | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | NB | NB | NM | NM | NS | ZO | ZO |
| NM | NB | NB | NM | NS | NS | ZO | ZO |
| NS | NB | NM | NS | NS | ZO | PS | PS |
| ZO | NM | NM | NS | ZO | PS | PM | PM |
| PS | NM | NS | ZO | PS | PS | PM | PB |
| PM | ZO | ZO | PS | PS | PM | PB | PB |
| PB | ZO | ZO | PS | PM | PM | PB | PB |
| e | ec | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PS | NS | NB | NB | NB | NM | PS |
| NM | PS | NS | NB | NM | NM | NS | ZO |
| NS | ZO | NS | NM | NM | NS | NS | ZO |
| ZO | ZO | NS | NS | NS | NS | NS | ZO |
| PS | ZO | ZO | ZO | ZO | ZO | ZO | ZO |
| PM | PB | PS | PS | PS | PS | PS | PB |
| PB | PB | PM | PM | PM | PS | PS | PB |
| Parameters | Explanation | Parameters | Explanation |
|---|---|---|---|
| Encoding Method | Binary Encoding | Mutation Function | Constrained Adaptive Mutation |
| Initial Population | Randomly Generate Within Specified Bounds | Crossover Probability | 0.9 |
| Population Size | 30 | Mutation Function | 0.1 |
| Selection Function | Random Uniform Selection | Maximum Evolution Generations | 100 |
| Crossover Function | Diversified Crossover | Stopping Generation | 100 |
| Evaluation Criteria | Passive Suspension | Fuzzy PID | GA-Fuzzy PID | Percentage of Fuzzy PID Optimization | Percentage of GA-Fuzzy PID Optimization |
|---|---|---|---|---|---|
| Vehicle Vertical Acceleration (m/s2) | 1.0473 | 0.8169 | 0.7541 | 22% | 28% |
| Suspension Wheel Travel (m) | 0.0156 | 0.0129 | 0.0117 | 17% | 25% |
| Dynamic Tire Load (kN) | 4.3454 | 4.1281 | 4.0412 | 5% | 7% |
| Evaluation Criteria | Passive Suspension | Fuzzy PID | GA-Fuzzy PID | Percentage of Fuzzy PID Optimization | Percentage of GA-Fuzzy PID Optimization |
|---|---|---|---|---|---|
| Vehicle Vertical Acceleration (m/s2) | 1.8062 | 1.3908 | 1.2643 | 23% | 30% |
| Suspension Wheel Travel (m) | 0.0337 | 0.0276 | 0.0249 | 18% | 26% |
| Dynamic Tire Load (kN) | 6.0895 | 5.7241 | 5.5414 | 6% | 9% |
| Evaluation Criteria | Passive Suspension | Fuzzy PID | GA-Fuzzy PID | Percentage of Fuzzy PID Optimization | Percentage of GA-Fuzzy PID Optimization |
|---|---|---|---|---|---|
| Vehicle Vertical Acceleration (m/s2) | 2.7638 | 2.0729 | 1.9070 | 25% | 31% |
| Suspension Wheel Travel (m) | 0.0611 | 0.0489 | 0.0446 | 20% | 27% |
| Dynamic Tire Load (kN) | 8.8378 | 8.3959 | 8.1308 | 5% | 8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Li, M.; Li, J.; Xu, J.; Wang, Z.; Liu, S. Research on Ride Comfort Control of Air Suspension Based on Genetic Algorithm Optimized Fuzzy PID. Appl. Sci. 2024, 14, 7787. https://doi.org/10.3390/app14177787
Zhang S, Li M, Li J, Xu J, Wang Z, Liu S. Research on Ride Comfort Control of Air Suspension Based on Genetic Algorithm Optimized Fuzzy PID. Applied Sciences. 2024; 14(17):7787. https://doi.org/10.3390/app14177787
Chicago/Turabian StyleZhang, Shaobo, Mei Li, Jinsong Li, Jie Xu, Zelong Wang, and Shuaihang Liu. 2024. "Research on Ride Comfort Control of Air Suspension Based on Genetic Algorithm Optimized Fuzzy PID" Applied Sciences 14, no. 17: 7787. https://doi.org/10.3390/app14177787