
Nonlinear Modeling and Transient Stability Analysis of Grid-Connected Voltage Source Converters during Asymmetric Faults Considering Multiple Control Loop Coupling

Abstract
:1. Introduction
- (1)
- Considering the coupling of multiple control loops, including positive and negative sequence separation, current control, and PLL control, a full-order nonlinear mathematical model of the VSC grid-connected system under asymmetric fault conditions is constructed. The phase trajectory method is used to analyze the system’s transient synchronization stability under asymmetric faults.
- (2)
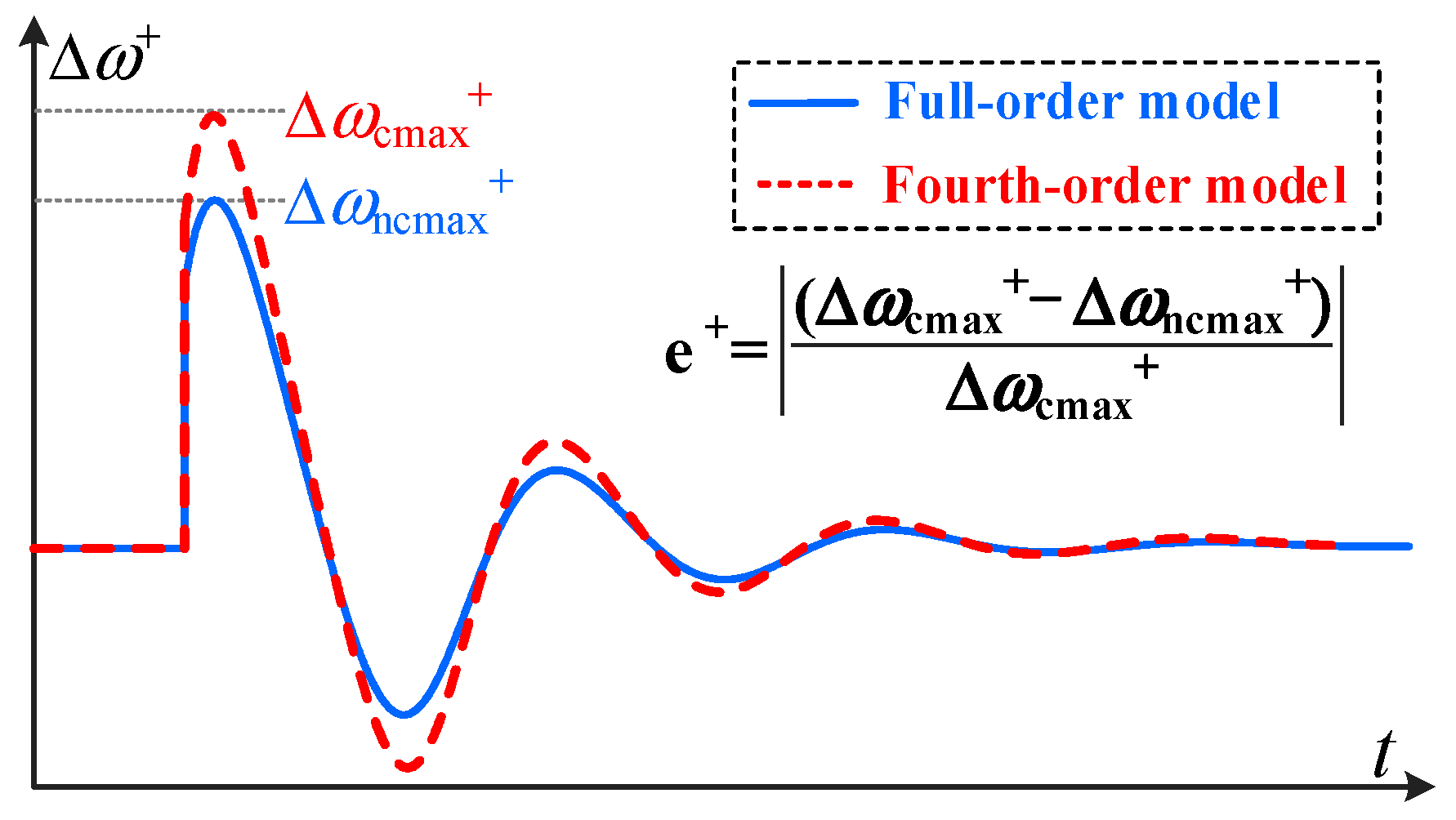
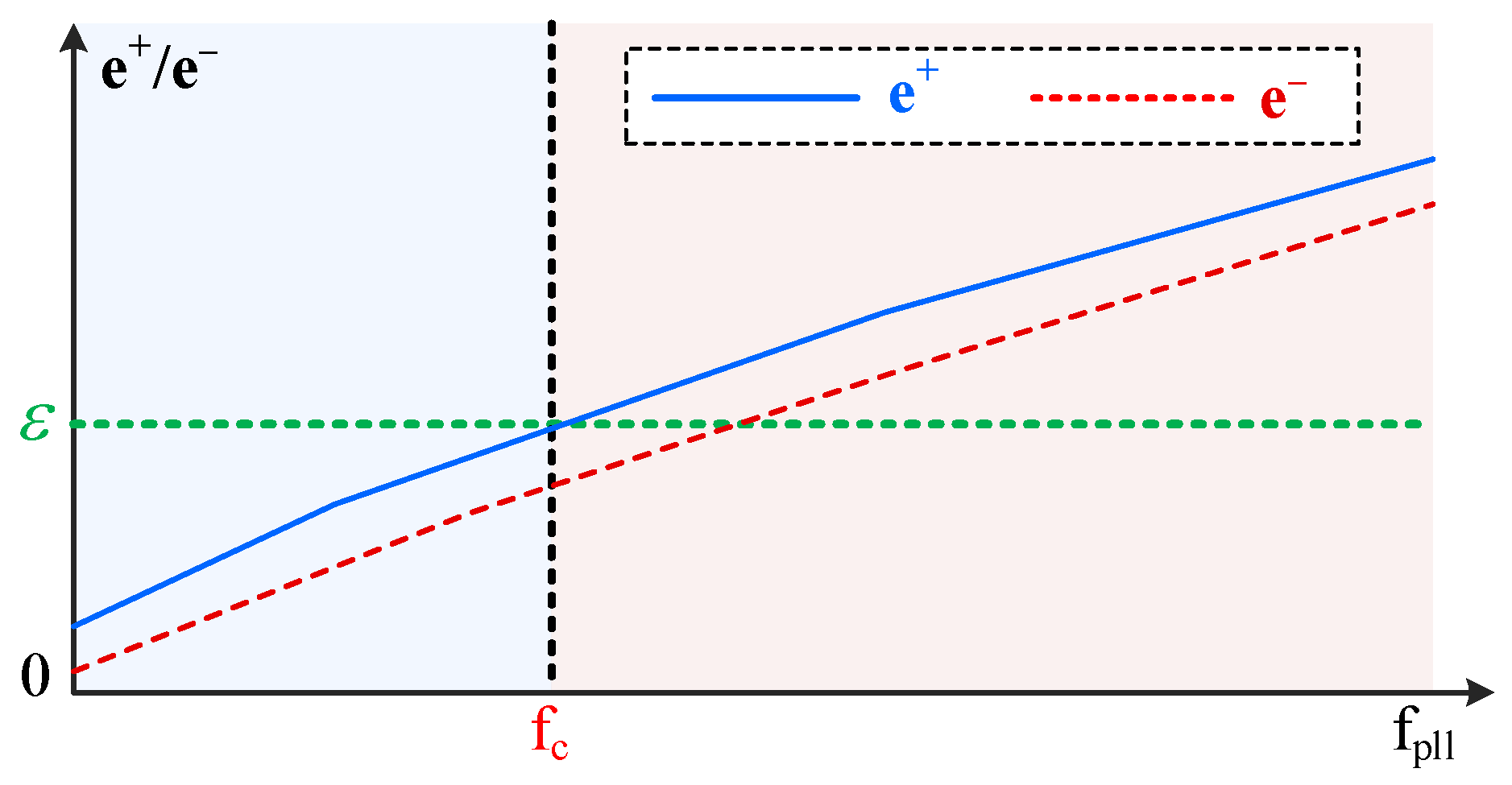
- Based on the full-order mathematical model established in this paper, numerical methods are used to analyze the PLL bandwidth threshold within which the impacts of positive and negative sequence separation and current control dynamics can be ignored. This provides a theoretical basis for the design of control parameters for grid-connected converters.
2. System Description
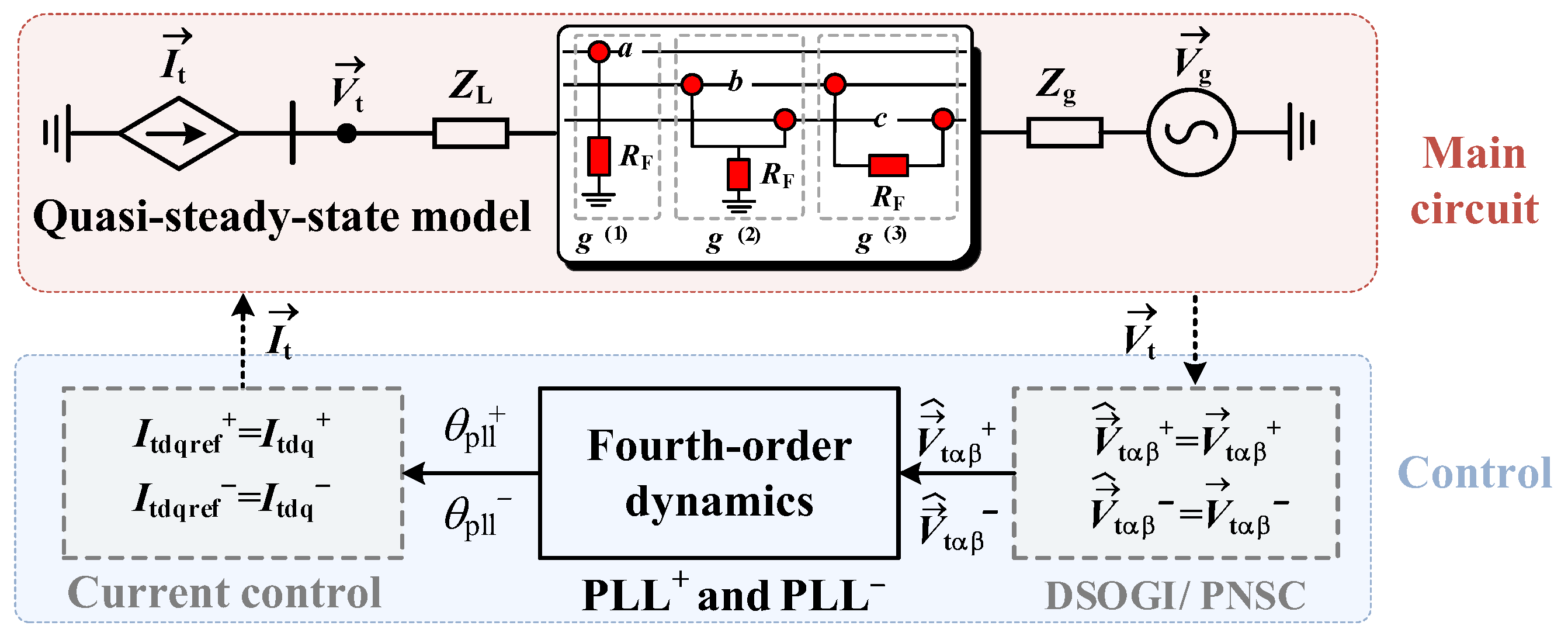
2.1. System Overview
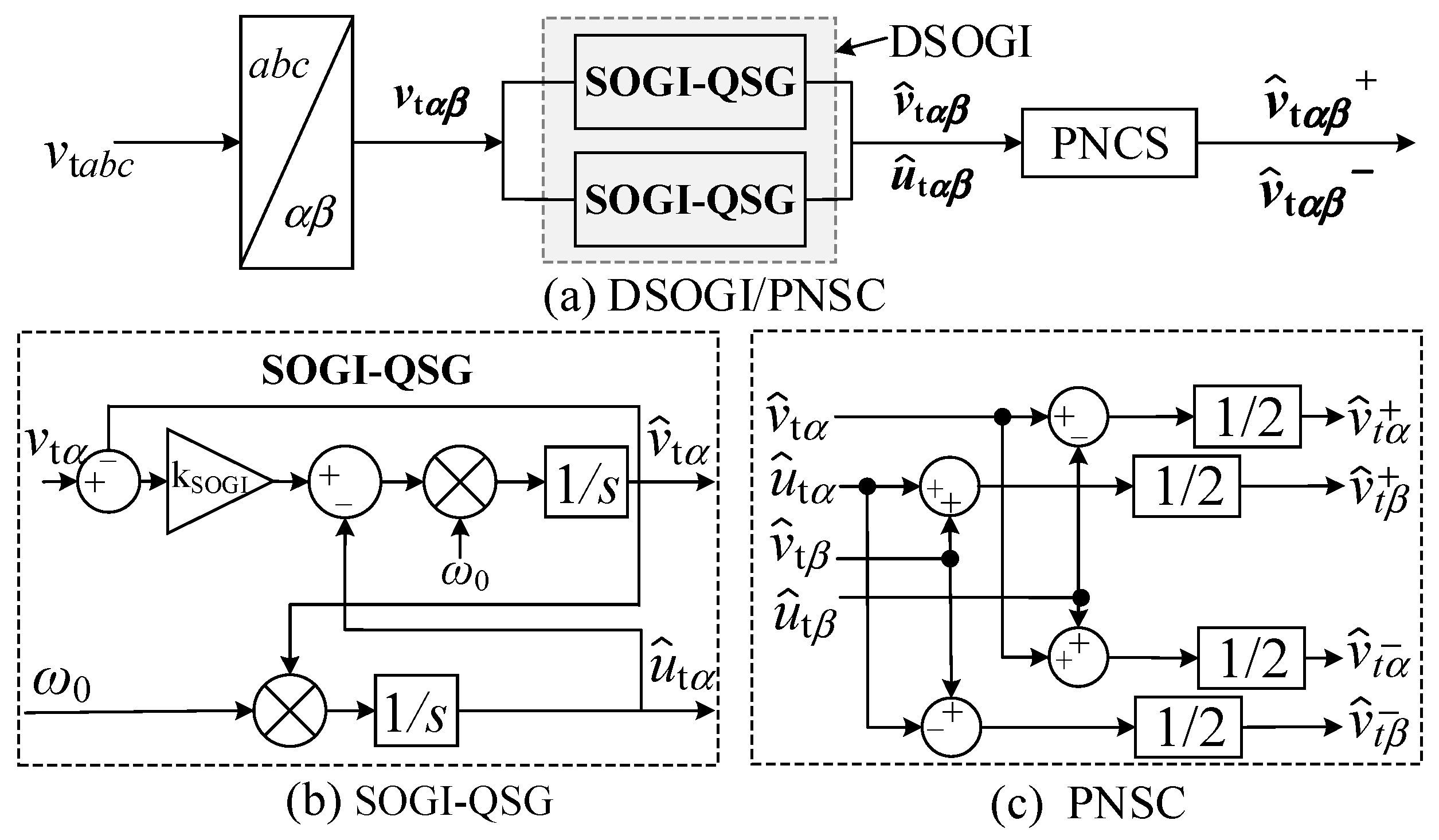
2.2. DSOGI/PNSC Control Structure
2.3. PLL+ and PLL− Control Structure
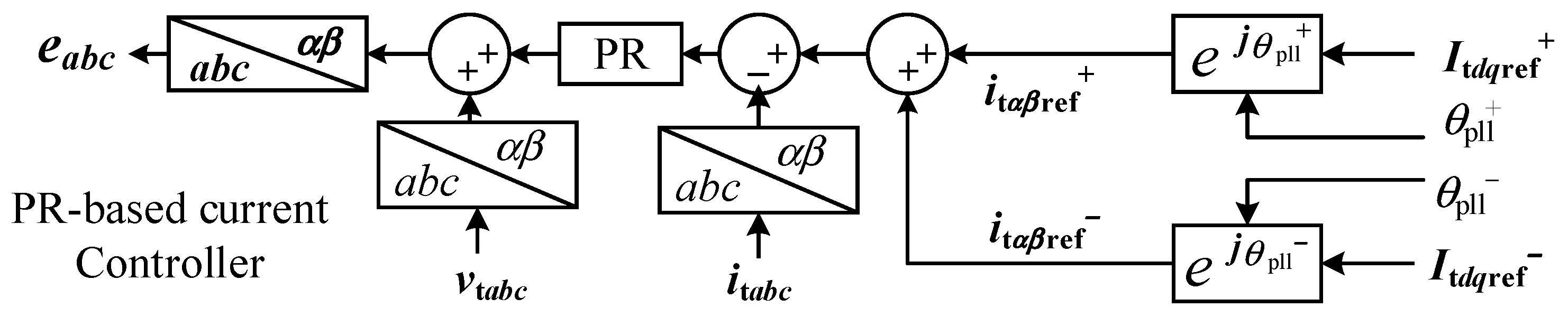
2.4. PR-Based Dual-Sequence Current Control
2.5. Fourth-Order Model Considering Only Phase-Locked Loop Dynamics
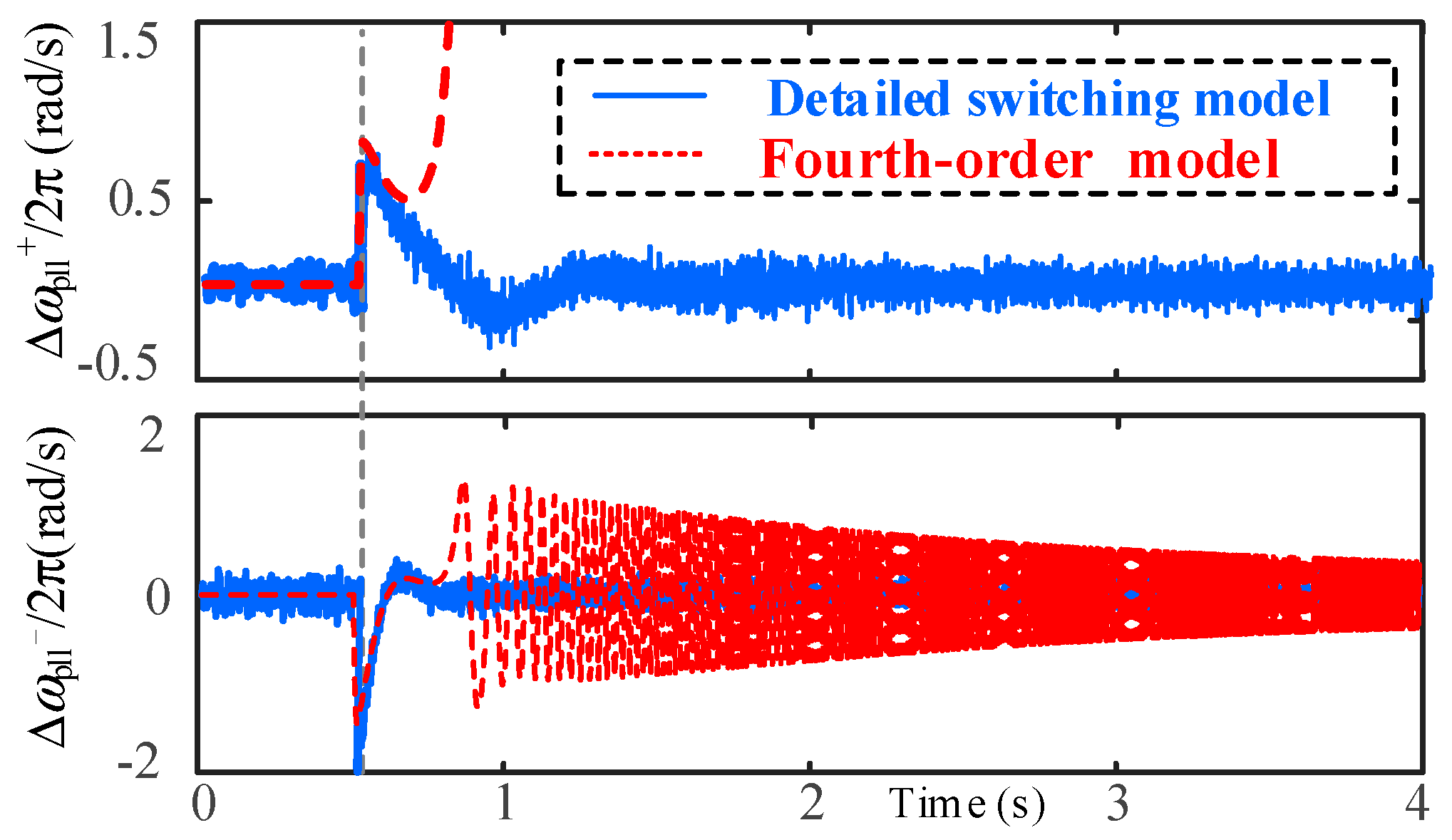
2.6. The Necessity of Considering Multiple Control Coupling
3. Detailed Nonlinear Modeling of Grid-Connected VSCs during Asymmetric Faults
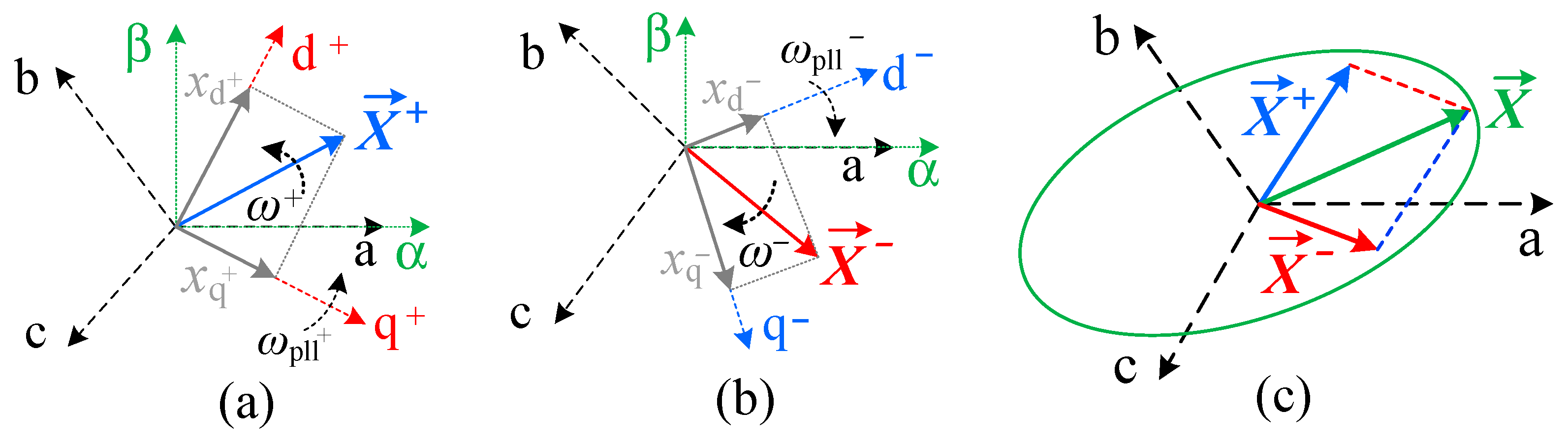
3.1. Coordinate System
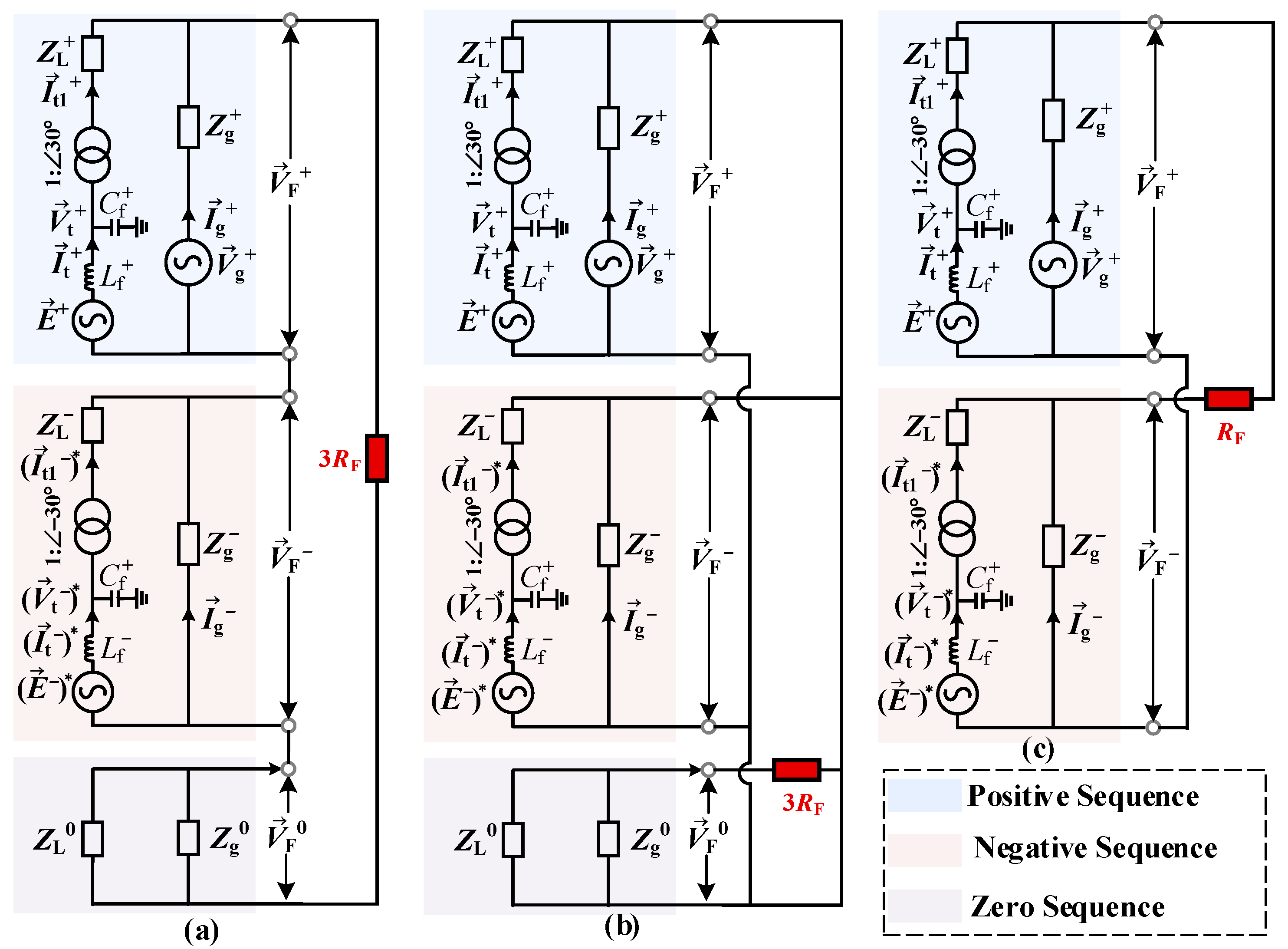
3.2. Main Circuit Modeling
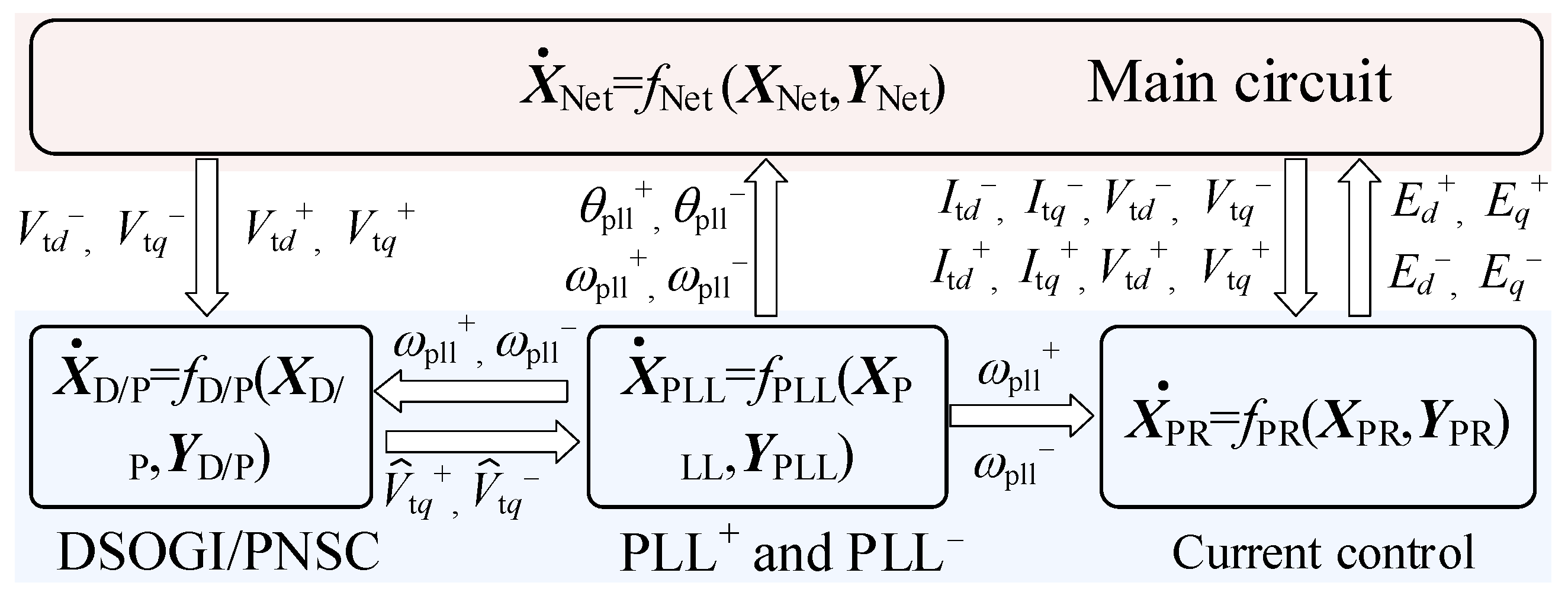
3.3. Control Modeling
- (a)
- DSOGI/PNSC modeling
- (b)
- PLL+ and PLL− modeling
- (c)
- PR-based current controller modeling
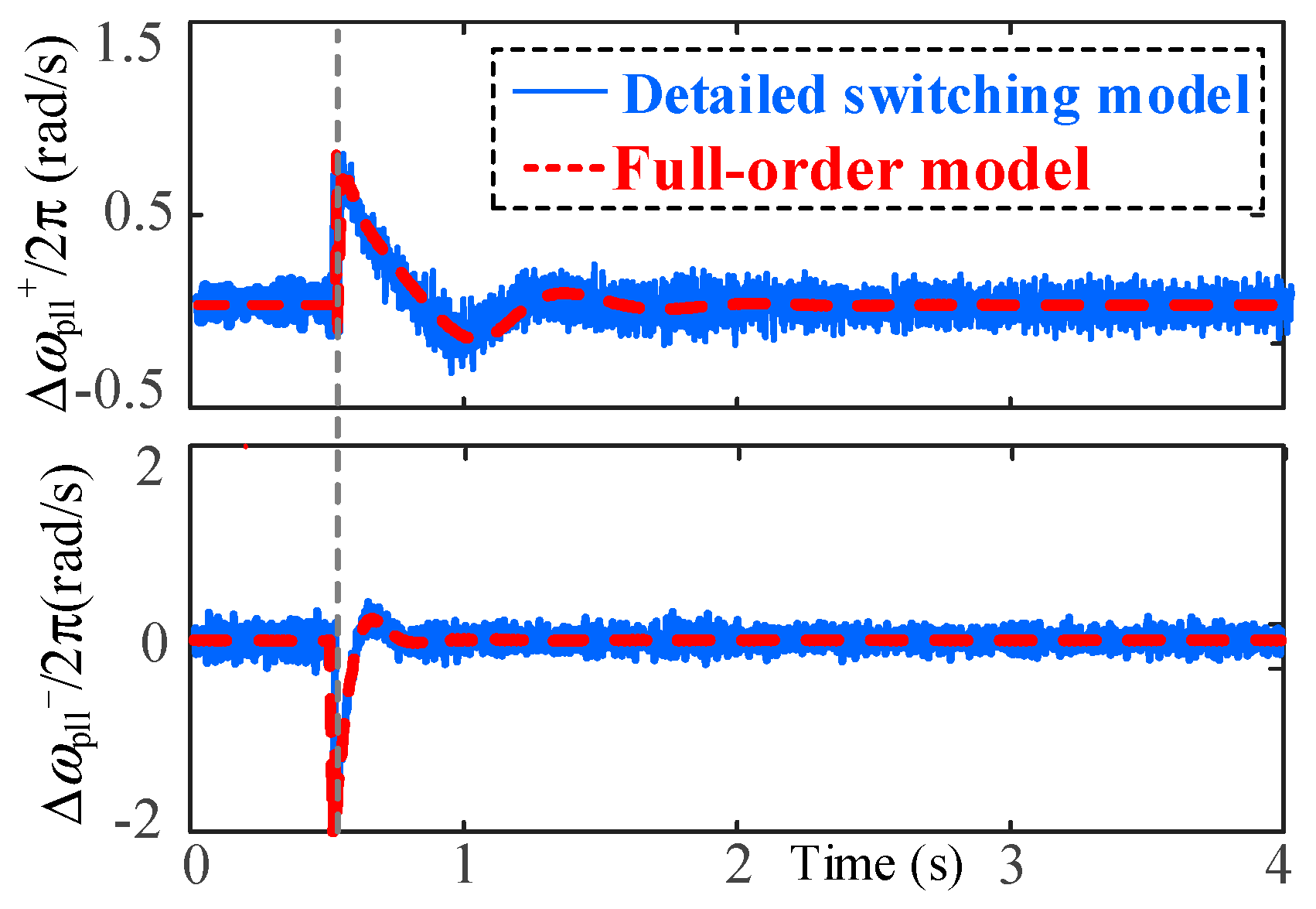
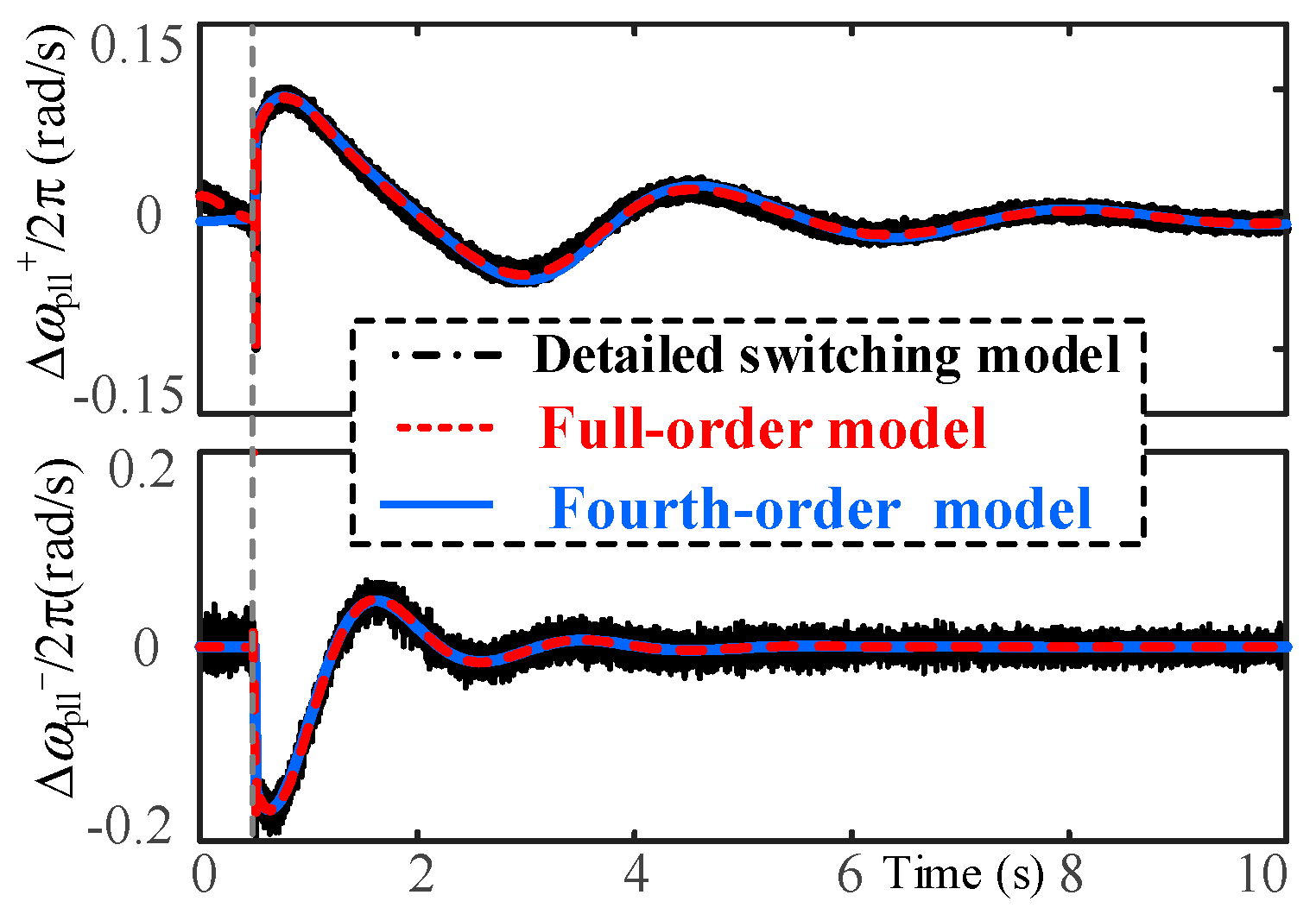
3.4. Complete Nonlinear Mathematical Model of the System and Validation
4. Transient Stability Analysis
4.1. The Phase Trajectory Method
- Step 1: Determine Initial Conditions:
- Step 2: Solve Differential Equations:
- Step 3: Visualize Phase Trajectory:
4.2. Transient Stability Analysis with the Phase Trajectory Method
4.3. Analysis of Condition for Considering Only PLL Dynamics
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Parameter Name | Value |
|---|---|---|
| Base values | Base value of power | 50 kW |
| Base value of AC voltage | 400 V | |
| Base value of frequency | 50 Hz | |
| Hardware parameters | Switching frequency | 10 kHz |
| LC filter Lf/Cf | 0.1/0.04 pu | |
| XL/RL | 0.5/0.05 pu | |
| Xg/Rg | 0.4/0.04 pu | |
| Ground resistance RF | 4.5 × 10−6 pu | |
| Itd,0+/Itq,0+/Vg | 0.9 pu/0.4 pu/1 pu | |
| Maximum current Im | 1 pu | |
| Control parameters | PLL PI parameters kp/ki | 100/2000 |
| Gain of SOGI unit kSOGI | 1.414 | |
| PR parameters kpi/kri/ωc | 0.5/5/6.5 |
Appendix B
References
- Zhou, Q.; Shahidehpour, M.; Alabdulwahab, A.; Abusorrah, A.M. Flexible Division and Unification Control Strategies for Resilience Enhancement in Networked Microgrids. IEEE Trans. Power Syst. 2020, 35, 474–486. [Google Scholar] [CrossRef]
- Li, Y.; Gu, Y.; Green, T.C. Revisiting grid-forming and grid-following inverters: A duality theory. IEEE Trans. Power Syst. 2022, 37, 4541–4554. [Google Scholar] [CrossRef]
- Taul, M.G.; Wang, X.; Davari, P.; Blaabjerg, F. An Overview of Assessment Methods for Synchronization Stability of Grid-Connected Converters under Severe Symmetrical Grid Faults. IEEE Trans. Power Electron. 2019, 34, 9655–9670. [Google Scholar] [CrossRef]
- Sun, R.; Ma, J.; Yang, W.; Wang, S.; Liu, T. Transient synchronization stability control for LVRT with power angle estimation. IEEE Trans. Power Electron. 2021, 36, 10981–10985. [Google Scholar] [CrossRef]
- Li, X.; Tian, Z.; Zha, X.; Sun, P.; Hu, Y.; Huang, M. An Iterative Equal Area Criterion for Transient Stability Analysis of Grid-tied Converter Systems with Varying Damping. IEEE Trans. Power Syst. 2023, 39, 1771–1784. [Google Scholar] [CrossRef]
- He, X.; Geng, H.; Xi, J.; Guerrero, J.M. Resynchronization Analysis and Improvement of grid-connected VSCs during grid faults. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 438–445. [Google Scholar] [CrossRef]
- Wu, H.; Wang, X. Design-Oriented Transient Stability Analysis of PLL-Synchronized Voltage-Source Converters. IEEE Trans. Power Electron. 2020, 35, 3573–3589. [Google Scholar] [CrossRef]
- Wang, X.; Wu, H.; Wang, X.; Dall, L.; Kwon, J.B. Transient Stability Analysis of Grid-Following VSCs Considering Voltage-Dependent Current Injection during Fault Ride-Through. IEEE Trans. Energy Convers. 2022, 37, 2749–2760. [Google Scholar] [CrossRef]
- Hu, Q.; Fu, L.; Ma, F.; Ji, F. Large Signal Synchronizing Instability of PLL-Based VSC Connected to Weak AC Grid. IEEE Trans. Power Syst. 2019, 34, 3220–3229. [Google Scholar] [CrossRef]
- Hu, Q.; Fu, L.; Ma, F.; Wang, G.; Liu, C.; Ma, Y. Impact of LVRT Control on Transient Synchronizing Stability of PLL-Based Wind Turbine Converter Connected to High Impedance AC Grid. IEEE Trans. Power Syst. 2022, 38, 5445–5458. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, C.; Cai, X. Large-Signal Grid-synchronization Stability Analysis of PLL-based VSCs Using Lyapunov’s Direct Method. IEEE Trans. Power Syst. 2022, 37, 788–791. [Google Scholar] [CrossRef]
- Zhang, Z.; Schuerhuber, R.; Fickert, L.; Friedl, K.; Chen, G.; Zhang, Y. Region of Attraction’s Estimation for Grid Connected Converters with Phase-Locked Loop. IEEE Trans. Power Syst. 2022, 37, 1351–1362. [Google Scholar] [CrossRef]
- Li, X.; Wang, Z.; Liu, Y.; Wang, Z.; Zhu, L.; Guo, L.; Zhang, C.; Zhu, J.; Wang, C. The Largest Estimated Domain of Attraction and its Applications for Transient Stability Analysis of PLL Synchronization in Weak-Grid-Connected VSCs. IEEE Trans. Power Syst. 2023, 38, 4107–4121. [Google Scholar] [CrossRef]
- Hu, Q.; Fu, L.; Ma, F.; Ji, F.; Zhang, Y. Analogized Synchronous-Generator Model of PLL-Based VSC and Transient Synchronizing Stability of Converter Dominated Power System. IEEE Trans. Sustain. Energy 2021, 12, 1174–1185. [Google Scholar] [CrossRef]
- Liu, C.C.; Yang, J.; Tse, C.K.; Huang, M. Transient Synchronization Stability of Grid-Following Converters Considering Nonideal Current Loop. IEEE Trans. Power Electron. 2023, 38, 13757–13769. [Google Scholar] [CrossRef]
- Wu, C.; Lyu, Y.; Wang, Y.; Blaabjerg, F. Transient Synchronization Stability Analysis of Grid-Following Converter Considering the Coupling Effect of Current Loop and Phase Locked Loop. IEEE Trans. Energy Convers. 2024, 39, 544–554. [Google Scholar] [CrossRef]
- NERC. 1200 MW Fault Induced Solar Photovoltaic Resource Interruption Disturbance Report—Southern California 8/16/2016 Event. June 2017. Available online: www.nerc.com (accessed on 8 June 2017).
- Göksu, Ö.; Teodorescu, R.; Bak, C.L.; Iov, F.; Kjær, P.C. Impact of wind power plant reactive current injection during asymmetrical grid faults. IET Renew. Power Gener. 2013, 7, 484–492. [Google Scholar] [CrossRef]
- Taul, M.G.; Golestan, S.; Wang, X.; Davari, P.; Blaabjerg, F. Modeling of converter synchronization stability under grid faults: The general case. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 10, 2790–2804. [Google Scholar] [CrossRef]
- He, X.; He, C.; Pan, S.; Geng, H.; Liu, F. Synchronization Instability of Inverter-Based Generation during Asymmetrical Grid Faults. IEEE Trans. Power Syst. 2022, 37, 1018–1031. [Google Scholar] [CrossRef]
- Liu, R.; Yao, J.; Sun, P.; Pei, J.; Zhang, H.; Zhao, Y. Complex Impedance-Based Frequency Coupling Characteristics Analysis of DFIG-Based WT during Asymmetric Grid Faults. IEEE Trans. Ind. Electron. 2021, 68, 8274–8288. [Google Scholar] [CrossRef]
- Akhavan, A.; Golestan, S.; Vasquez, J.C.; Guerrero, J.M. Control and Stability Analysis of Current-Controlled Grid-Connected Inverters in Asymmetrical Grids. IEEE Trans. Power Electron. 2022, 37, 14252–14264. [Google Scholar] [CrossRef]
- Li, Y.; Lin, C.; Hu, J.; Guo, J. PLL Synchronization Stability of Grid-Connected VSCs Under Asymmetric AC Faults. IEEE Trans. Energy Convers. 2022, 37, 2438–2448. [Google Scholar] [CrossRef]
- Li, X.; Wang, Z.; Zhu, L.; Guo, L.; Wang, C. Analytical Dual-Sequence Current Injections Feasible Region of Weak-Grid Connected VSC under Asymmetric Grid Faults. IEEE Trans. Power Syst. 2023, 38, 5546–5559. [Google Scholar] [CrossRef]
- Wang, Z.; Guo, L.; Li, X.; Pang, X.; Li, X.; Zhou, X.; Wang, C. PLL Synchronization Transient Stability Analysis of a Weak-Grid Connected VSC during Asymmetric Faults. IEEE Trans. Power Electron. 2024, 39, 2140–2154. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, J.; Zhai, D.; Li, X.; Wang, Z. Nonlinear Modeling and Transient Stability Analysis of Grid-Connected Voltage Source Converters during Asymmetric Faults Considering Multiple Control Loop Coupling. Appl. Sci. 2024, 14, 7834. https://doi.org/10.3390/app14177834
Guo J, Zhai D, Li X, Wang Z. Nonlinear Modeling and Transient Stability Analysis of Grid-Connected Voltage Source Converters during Asymmetric Faults Considering Multiple Control Loop Coupling. Applied Sciences. 2024; 14(17):7834. https://doi.org/10.3390/app14177834
Chicago/Turabian StyleGuo, Jingkuan, Denghui Zhai, Xialin Li, and Zhi Wang. 2024. "Nonlinear Modeling and Transient Stability Analysis of Grid-Connected Voltage Source Converters during Asymmetric Faults Considering Multiple Control Loop Coupling" Applied Sciences 14, no. 17: 7834. https://doi.org/10.3390/app14177834