
Advancements in Semi-Active Automotive Suspension Systems with Magnetorheological Dampers: A Review


Abstract
1. Introduction
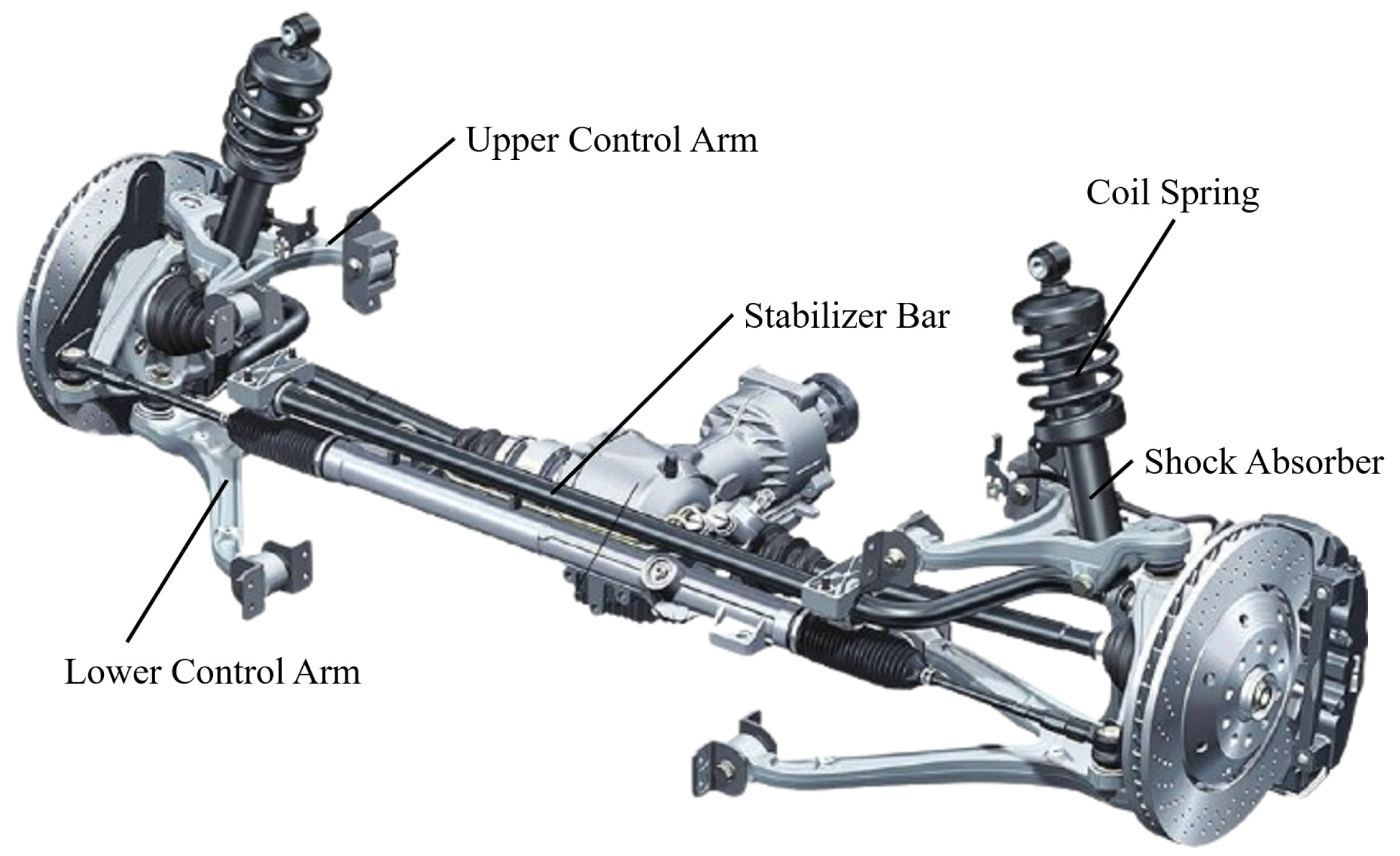
2. Suspension Systems
2.1. Functions of the Suspension Systems
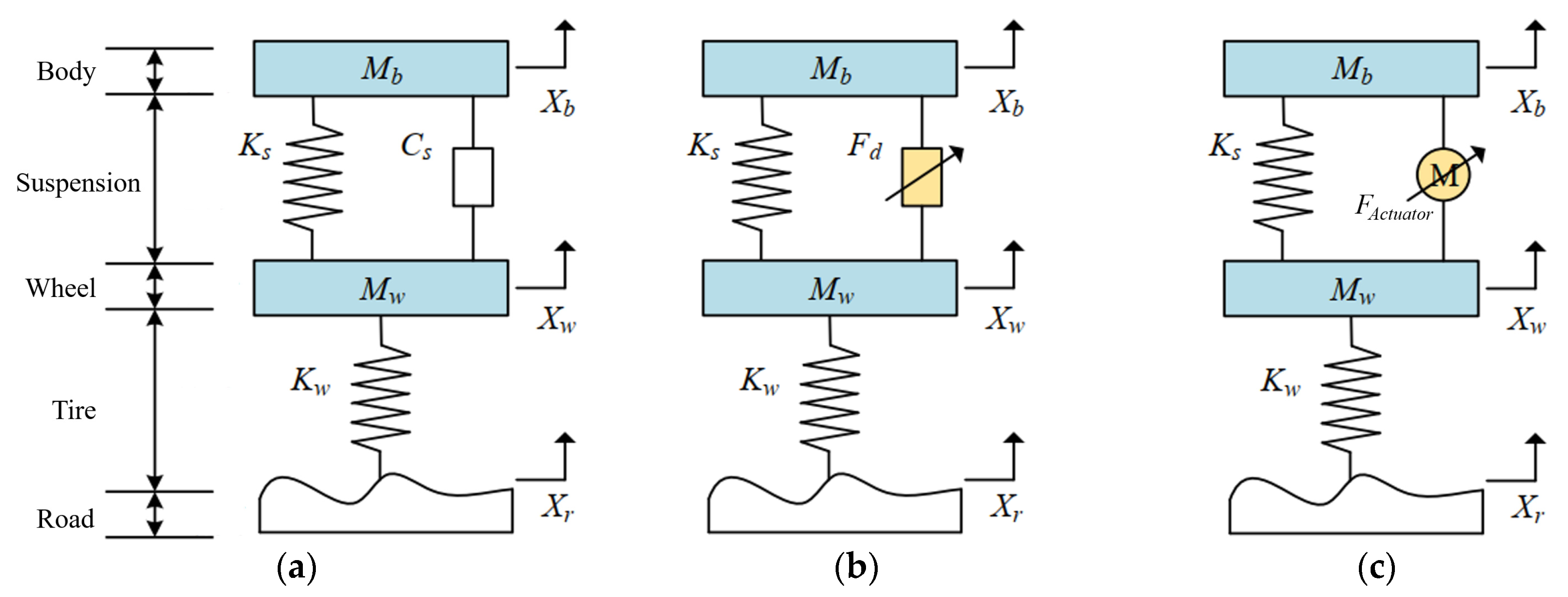
2.2. Types of the Suspension Systems
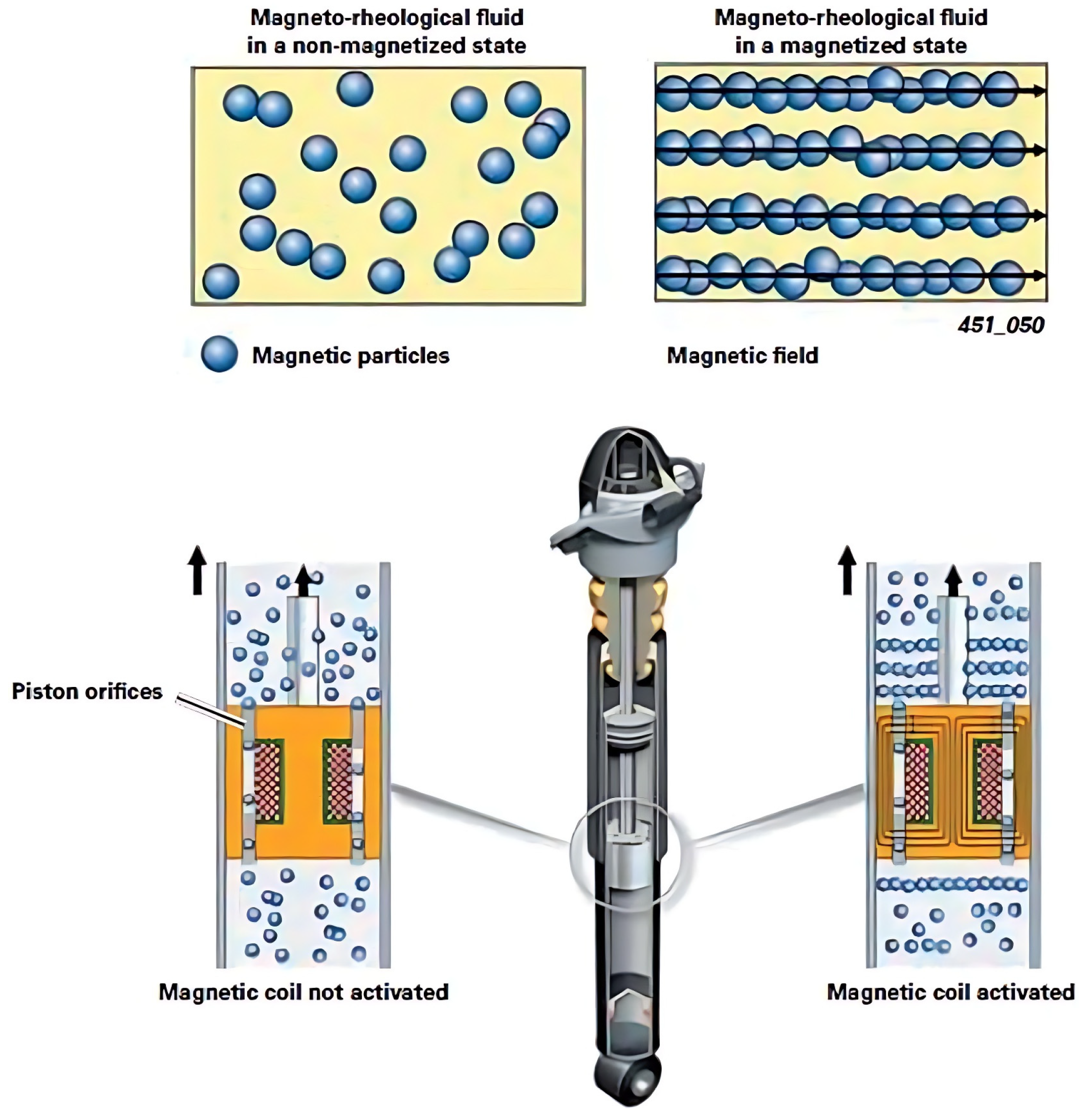
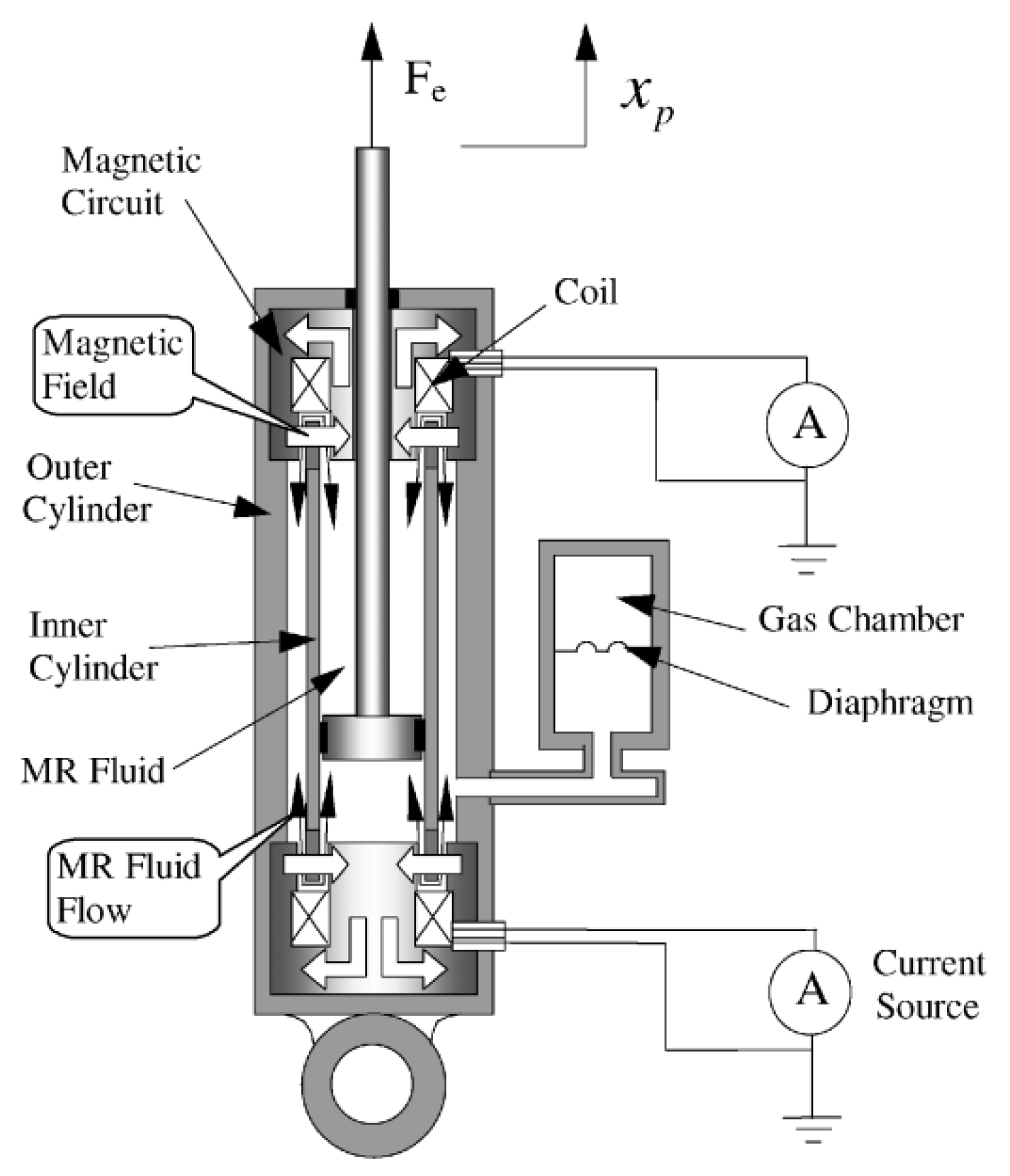
3. Magnetorheological Dampers (MRDs)
4. Semi-Active Control of Suspension Systems
4.1. Classical Control Strategies
4.1.1. Skyhook Control
4.1.2. Groundhook Control
4.1.3. Hybrid Control
4.2. Modern Control Strategies
4.2.1. Optimal Control
4.2.2. Model Predictive Control (MPC)
4.2.3. Robust Control
4.2.4. Adaptive Control
4.3. Intelligent Control Strategies
4.3.1. Fuzzy Control
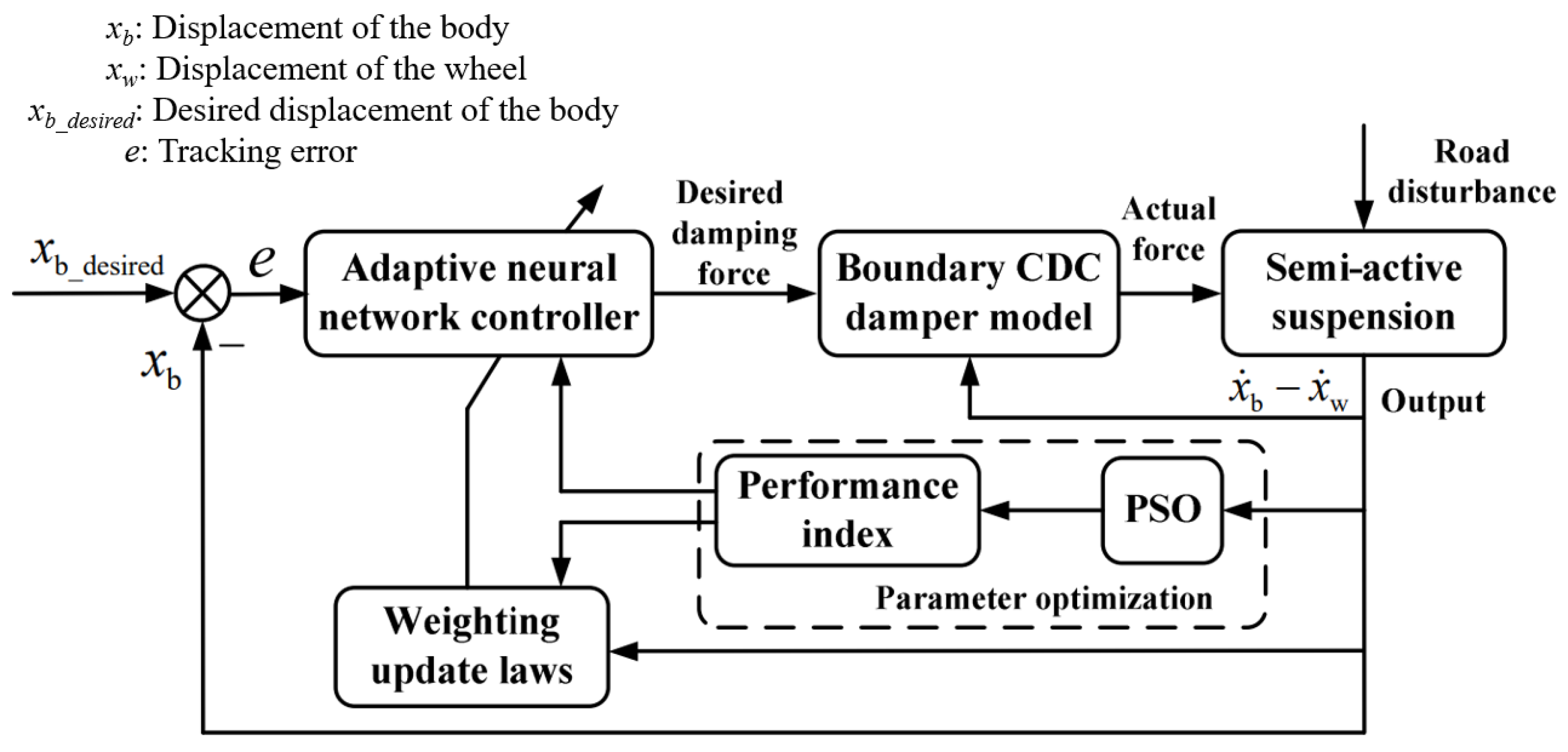
4.3.2. Neural Network Control
4.3.3. Bio-Inspired Optimization Algorithms
5. The Practical Applications of the MR Semi-Active Suspensions
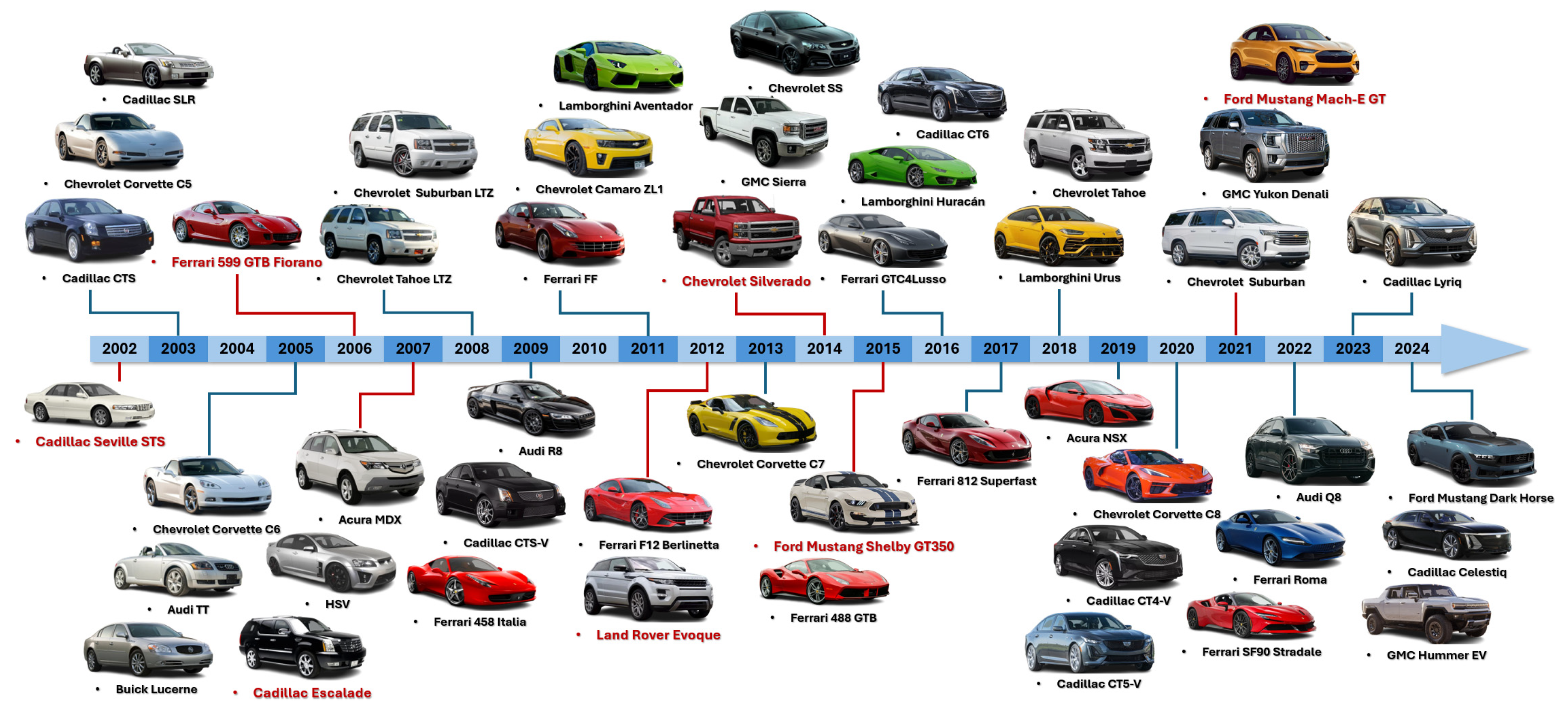
- Inheritance: The MagneRide has been consistently applied in several vehicle models. For instance, from the Corvette C5 to C8, this technology has undergone continuous refinement aimed at improving vehicle performance and comfort. Similarly, several Ferrari models such as the 458 Italia and F12 Berlinetta also incorporate MagneRide, highlighting the ongoing evolution of this technology within high-performance sports cars. Since its initial integration, Cadillac has likewise maintained the use of this technology across various models, demonstrating its sustained application in the luxury sedan segment.
- Versatility: Initially, MagneRide was predominantly used in sports cars and luxury sedans. Through advancements in sealing, structure, and control in its third-generation system, MagneRide has expanded its application to a wide range of vehicle types including SUVs, pickups, and off-road vehicles. Such widespread adoption ensures optimal handling and comfort whether during high-speed cruising, performance driving, or traversing challenging terrains.
- Scalability: The application of MagneRide has progressively broadened beyond its initial high-performance vehicle models (e.g., from the 2008 Suburban LTZ and Tahoe LTZ to the 2021 Suburban and Tahoe). Originally implemented in high-performance sports cars and luxury sedans like Ferrari and Cadillac, MagneRide has in recent years found integration into mainstream vehicle models. This integration underscores a notable trend of downward compatibility and the widespread adoption of this advanced technology.
- Electrification: MagneRide technology has adeptly responded to the evolution of automotive energy forms, shifting progressively from conventional fuel-powered vehicles to electric vehicles. The inclusion of MagneRide in models like the Ford Mustang Mach-E GT signifies a pivotal milestone in its successful integration and implementation within the electric vehicle sector. The electrification adaptability of this technology ensures that vehicles can deliver exceptional driving experiences across different energy forms.
6. Conclusions
- The paper emphasized the significant attributes of MRDs, including their rapid response, reversibility, compact size, low energy consumption, continuous damping adjustment, and high reliability. These characteristics have enabled MRDs to be widely adopted in various industries. The design and optimization of MRDs involve complex interactions among fluid dynamics, magnetic fields, and structural mechanics, with notable innovations such as twin-coil and twin-tube configurations, self-inductive and self-powered dampers, and advanced controllers enhancing their performance.
- The various control strategies employed in semi-active suspension systems were thoroughly discussed, which can be categorized into classical, modern, and intelligent methods. These strategies play a crucial role in optimizing suspension performance and improving vehicle ride comfort and stability. The current research focus on intelligent control is progressively pivoting towards hybrid control, which integrates modern control with intelligent control, which not only enhances the adaptability and performance of semi-active suspension systems but also potentially opens new avenues for the development of autonomous vehicles.
- The successful implementation of the MagneRide system by Lord Corporation and Delphi Corporation in 1999 marked a significant milestone in the practical application of MRDs in automotive suspension systems. The widespread adoption of MagneRide in high-end and luxury vehicles demonstrated its effectiveness in enhancing vehicle dynamics and user experience, despite challenges related to cost and technical complexity.
- Looking ahead, enhanced integration of artificial intelligence and machine learning, the development of hybrid control strategies, advancements in sensor technology, and a commitment to energy efficiency and sustainability will drive this progress. Moreover, seamless integration with autonomous and connected vehicles, along with increased collaboration and standardization among researchers, manufacturers, and industries, will facilitate the widespread adoption and consistent performance of advanced semi-active suspension systems across more vehicle models.
Author Contributions
Funding
Conflicts of Interest
References
- Jia, T.H.; Pan, Y.N.; Liang, H.J.; Lam, H.K. Event-Based Adaptive Fixed-Time Fuzzy Control for Active Vehicle Suspension Systems with Time-Varying Displacement Constraint. IEEE Trans. Fuzzy Syst. 2022, 30, 2813–2821. [Google Scholar] [CrossRef]
- Manna, S.; Mani, G.; Ghildiyal, S.; Stonier, A.A.; Peter, G.; Ganji, V.; Murugesan, S. Ant Colony Optimization Tuned Closed-Loop Optimal Control Intended for Vehicle Active Suspension System. IEEE Access. 2022, 10, 53735–53745. [Google Scholar] [CrossRef]
- Mihai, I.; Andronic, F. Behavior of a Semi-Active Suspension System Versus a Passive Suspension System on an Uneven Road Surface. Mechanika 2014, 20, 64–69. [Google Scholar] [CrossRef]
- Yong, H.; Seo, J.; Kim, J.; Kim, M.; Choi, J. Suspension Control Strategies Using Switched Soft Actor-Critic Models or Real Roads. IEEE Trans. Ind. Electron. 2023, 70, 824–832. [Google Scholar] [CrossRef]
- Olabi, A.G.; Grunwald, A. Design and Application of Magneto-Rheological fluid. Mater. Des. 2007, 28, 2658–2664. [Google Scholar] [CrossRef]
- Yazid, I.I.M.; Mazlan, S.A.; Kikuchi, T.; Zamzuri, H.; Imaduddin, F. Design of Magnetorheological Damper with a Combination of Shear and Squeeze Modes. Mater. Des. 2014, 54, 87–95. [Google Scholar] [CrossRef]
- Choi, S.B.; Lee, H.S.; Hong, S.R.; Cheong, C.C. Control and Response Characteristics of a Magneto-Rheological Fluid Damper for Passenger Vehicles. In Proceedings of the Society of Photo-Optical Instrumentation Engineers, Newport Beach, CA, USA, 5–9 March 2000. [Google Scholar]
- Chen, C.; Liao, W.H. Feasibility Study of Self-Powered Magnetorheological Damer Systems. In Proceedings of the Active and Passive Smart Structures and Integrated Systems, San Diego, CA, USA, 12–15 March 2012. [Google Scholar]
- Strecker, Z.; Roupec, J.; Mazurek, I.; Klapka, M. Limiting Factors of the Response Time of the Magnetorheological Damper. Int. J. Appl. Electromagn. Mech. 2015, 17, 25–41. [Google Scholar] [CrossRef]
- Ahmadian, M.; Vahdati, N. Transient Dynamics of Semiactive Suspensions with Hybrid Control. J. Intell. Mater. Syst. Struct. 2006, 17, 145–153. [Google Scholar] [CrossRef]
- Valasek, M.; Novak, M.; Sika, Z.; Vaculin, O. Extended Ground-Hook—New Concept of Semi-Active Control of Truck’s Suspension. Veh. Syst. Dyn. 1997, 27, 289–303. [Google Scholar] [CrossRef]
- Ahmadian, M. A Hybrid Semiactive Control for secondary suspension applications. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Dallas, TX, USA, 16–21 November 1997. [Google Scholar]
- Bubhardt, J.; Isermann, R. Realization of Adaptive Shock Absorbers by Estimating Physical Process Coefficients of a Vehicle Suspension System. In Proceedings of the American Control Conference, Chicago, IL, USA, 24–26 June 1992. [Google Scholar]
- Venhovens, P.J.T. The Development and Implementation of Adaptive Semiactive Suspension Control. Veh. Syst. Dyn. 1994, 23, 211–235. [Google Scholar] [CrossRef]
- Gordon, T.J.; Sharp, R.S. On Improving the Performance of Automotive Semi-Active Suspension Systems Through Road Preview. J. Sound Vibr. 1998, 217, 163–182. [Google Scholar] [CrossRef]
- Choi, S.B.; Lee, H.S.; Park, Y.P. H∞ Control Performance of a Full-Vehicle Suspension Featuring Magnetorheological Dampers. Veh. Syst. Dyn. 2002, 38, 341–360. [Google Scholar] [CrossRef]
- Huang, C.J.; Lin, J.S.; Chen, C.C. Road-Adaptive Algorithm Design for Half-Car Active Suspension System. Expert Syst. Appl. 2010, 37, 4392–4402. [Google Scholar] [CrossRef]
- Al-Holou, N.; Joo, D.S.; Shaout, A. The Development of Fuzzy Logic Based Controller for Semi-Active Suspension System. In Proceedings of the 1994 37th Midwest Symposium on Circuits and Systems, Lafayette, LA, USA, 3–5 August 1994. [Google Scholar]
- Liu, Y.J.; Zeng, Q.; Tong, S.C.; Chen, C.L.P.; Liu, L. Adaptive Neural Network Control for Active Suspension Systems with Time-Varying Vertical Displacement and Speed Constraints. IEEE Trans. Ind. Electron. 2019, 66, 9458–9466. [Google Scholar] [CrossRef]
- Ding, Z.S.; Zhao, F.; Qin, Y.C.; Tan, C. Adaptive Neural Network Control for Semi-Active Vehicle Suspensions. J. Vibroeng. 2017, 19, 2654–2669. [Google Scholar] [CrossRef]
- Ammon, D. Spring Damper-Strut. Germany Patent 19958178, 2 December 1999. [Google Scholar]
- Wan, Y.; Schimmels, J.M. Improved Vibration Isolation Seat Suspension Designs Based on Position-Dependent Nonlinear Stiffness and Damping Characteristics. J. Dyn. Syst. Meas. Control-Trans. ASME. 2003, 125, 330–338. [Google Scholar] [CrossRef]
- Fedrspiel-Labrosse, J.M. Beitrag Zum Stadium and Zur Vervolkommung der Aufhangung der Fahrzeuge. ATZ 1955, 57, 6370. [Google Scholar]
- Iijima, T.; Akatsu, Y.; Takahashi, K.; Murakami, H. Development of a Hydraulic Active Suspension; SAE International: Warrendale, PA, USA, 1993. [Google Scholar]
- Soliman, A.; Kaldas, M. Semi-active suspension systems from research to mass-market—A review. J. Low. Freq. Noise Vib. Act. Control 2021, 40, 1005–1023. [Google Scholar] [CrossRef]
- Huang, H.; Chen, C.; Zhang, Z.C.; Zheng, J.N.; Li, Y.Z.; Chen, S.M. Design and Experiment of a New Structure of MR Damper for Improving and Self-Monitoring the Sedimentation Stability of MR Fluid. Smart Mater. Struct. 2020, 29, 75012–75019. [Google Scholar] [CrossRef]
- Rabinow, J. The magnetic fluid clutch. Electr. Eng. 1948, 67, 1308–1315. [Google Scholar] [CrossRef]
- Winslow, W.M. Field Controlled Hydraulic Device. U.S. Patent 2661596, 8 December 1953. [Google Scholar]
- Carlson, J.D.; Chrzan, M.J. Magnetorheological Fluid Dampers. U.S. Patent 5277281, 11 January 1994. [Google Scholar]
- Schwemmer, L.J.; Wolfe, P.T.; Majoram, R.H.; Denton, G.R. Variable Shock Absorber with Integrated Controller, Actuator and Sensors. U.S. Patent 5396973, 14 March 1995. [Google Scholar]
- Kamath, G.M.; Wereley, N.M. A Nonlinear Viscoelastic-Plastic Model for Electrorheological Fluids. Smart Mater. Struct. 1997, 6, 351–359. [Google Scholar] [CrossRef]
- Wereley, N.M.; Pang, L.; Kamath, G.M. Idealized Hysteresis Modeling of Electrorheological and Magnetorheological Dampers. J. Intell. Mater. Syst. Struct. 1998, 9, 642–649. [Google Scholar] [CrossRef]
- Pare, C.A. Experimental Evaluation of Semiactive Magnetorheological Suspensions for Passenger Vehicles; Virginia Tech: Blacksburg, VA, USA, 1998. [Google Scholar]
- Lindler, J.E.; Dimock, G.A.; Wereley, N.M. Design of a Magnetorheological Automotive Shock Absorber. SPIE 2000, 3985, 426–437. [Google Scholar]
- Hitchock, G.H.; Wang, X.J.; Gordaninejad, F. A New Bypass Magnetorheological Fluid Damper. J. Vib. Acoust.-Trans. ASME 2007, 129, 641–647. [Google Scholar] [CrossRef]
- Sohn, J.W.; Oh, J.S.; Choi, S.B. Design and Novel Type of a Magnetorheological Damper Featuring Piston Bypass Hole. Smart Mater. Struct. 2015, 24, 035013. [Google Scholar] [CrossRef]
- Karnopp, D.; Crosby, M.J.; Harwood, R.A. Vibration Control Using Semi-Active Force Generators. J. Eng. Ind.-Trans. ASME 1974, 96, 619–626. [Google Scholar] [CrossRef]
- Margolis, D.L.; Tylee, J.L.; Hrovat, D. Heave Mode Dynamics of a Tracked Air Cushion Vehicle with Semiactive Airbag Secondary Suspension. J. Dyn. Sys. Meas. Control 1975, 97, 399–407. [Google Scholar] [CrossRef]
- Sammier, D.; Sename, O.; Dugard, L. Skyhook and H∞ Control of Semi-Active Suspensions: Some Practical Aspects. Veh. Syst. Dyn. 2003, 39, 279–308. [Google Scholar] [CrossRef]
- Shimoya, N.; Katsuyama, E. A Study of Vehicle Ride Comfort Using Triple Skyhook Control for Semi-Active Suspension System. Trans. Soc. Automot. Eng. Jpn. 2019, 50, 1631–1636. [Google Scholar]
- Du, X.M.; Yu, M.; Fu, J.; Huang, C.Q. Experimental Study on Shock Control of a Vehicle Semi-Active Suspension with Magneto-Rheological Damper. Smart Mater. Struct. 2020, 29, 074002. [Google Scholar] [CrossRef]
- Liu, W.; Wang, R.C.; Xie, C.Y.; Ye, Q. Investigation on Adaptive Preview Distance Path Tracking Control with Directional Error Compensation. Proc. Inst. Mech. Eng. Part I-J. Syst. Control Eng. 2020, 234, 484–500. [Google Scholar] [CrossRef]
- Ma, T.; Bi, F.R.; Wang, X.; Tian, C.F.; Lin, J.W.; Wang, J.; Pang, G.J. Optimized Fuzzy Skyhook Control for Semi-Active Vehicle Suspension with New Inverse Model of Magnetorheological Fluid Damper. Energies 2021, 14, 1674. [Google Scholar] [CrossRef]
- Savaresi, S.M.; Silani, E.; Bittanti, S. Semi-Active Suspensions: An Optimal Control Strategy for a Quarter-Car Model. IFAC Proc. Vol. 2004, 37, 553–558. [Google Scholar] [CrossRef]
- Savaresi, S.M.; Silani, E.; Bittanti, S. Acceleration-Driven-Damper (ADD): An Optimal Control Algorithm for Comfort-Oriented Semi-Active Suspensions. J. Dyn. Sys. Meas. Control 2005, 127, 218–229. [Google Scholar] [CrossRef]
- Savaresi, S.M.; Spelta, C. Mixed Sky-Hook and ADD: Approaching the Filtering Limits of a Semi-Active Suspension. J. Dyn. Syst. Meas. Control Trans. ASME 2007, 129, 382–392. [Google Scholar] [CrossRef]
- Ahmadian, M.; Pare, C.A. A Quarter-Car Experimental Analysis of Alternative Semiactive Control Methods. J. Intell. Mater. Syst. Struct. 2000, 11, 604–612. [Google Scholar] [CrossRef]
- Savaresi, S.M.; Poussot-Vassal, C.; Spelta, C.; Sename, O.; Dugard, L. Semi-Active Suspension Control Design for Vehicles; Elsevier: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Koo, J.H.; Ahmadian, M.; Setareh, M.; Murray, T. In Search of Suitable Control Methods for Semi-Active Tuned Vibration Absorbers. J. Vib. Control 2004, 10, 163–174. [Google Scholar] [CrossRef]
- Goncalves, F.D.; Ahmadian, M. A Hybrid Control Policy for Semi-Active Vehicle Suspensions. Shock Vib. 2003, 10, 59–69. [Google Scholar] [CrossRef]
- Mulla, A.; Jalwadi, S.; Unaune, D. Performance Analysis of Skyhook, Groundhook and Hybrid Control Strategies on Semiactive Suspension System. Int. J. Curr. Eng. Technol. 2014, 3, 265–269. [Google Scholar]
- Thompson, A.G. Optimal and Suboptimal Linear Active Suspensions for Road Vehicles. Veh. Syst. Dyn. 1984, 13, 61–72. [Google Scholar] [CrossRef]
- Tseng, H.E.; Hedrick, J.K. Semiactive Control Laws—Optimal and Suboptimal. Veh. Syst. Dyn. 1994, 23, 545–569. [Google Scholar] [CrossRef]
- Karkoub, M.A.; Zribi, M. Active/Semi-Active Suspension Control Using Magnetorheological Actuators. Int. J. Syst. Sci. 2006, 37, 35–44. [Google Scholar] [CrossRef]
- Chen, S.A.; He, R.; Liu, H.G.; Yao, M. Probe into Necessity of Active Suspension Based on LQG Control. Phys. Procedia 2012, 25, 932–938. [Google Scholar] [CrossRef]
- Unger, A.; Schimmack, F.; Lohmann, B.; Schwarz, R. Application of LQ-Based Semi-Active Suspension Control in a Vehicle. Control Eng. Pract. 2013, 21, 1841–1850. [Google Scholar] [CrossRef]
- Hirao, R.; Yamakado, M.; Ichimaru, N. Improvement of Ride Performance by Damping Force Control based on Bi-linear Optimal Control Applying Piston Speed Dependent Damping Coefficient Limitation. Trans. Soc. Automot. Eng. Jpn. 2019, 50, 1055–1061. [Google Scholar]
- Prassad, S.G.; Mohan, K.M. A Contemporary Adaptive Air Suspension Using LQR Control for Passenger Vehicles. ISA Trans. 2019, 93, 244–254. [Google Scholar]
- Rao, L.V.V.G.; Narayanan, S. Optimal Response of Half Car Vehicle Model with Sky-Hook Damper Using LQR with Look Ahead Preview Control. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 119–133. [Google Scholar] [CrossRef]
- Rawlings, J.B.; Mayne, D.Q. Model Predictive Control: Theory and Design; Nob Hill Publishing LLC: Madison, WI, USA, 2009. [Google Scholar]
- Giorgetti, N.; Bemporad, A.; Tseng, H.E.; Hrovat, D.; Peric, N.; Petrovic, I.; Butkovic, Z. Hybrid Model Predictive Control Application Towards Optimal Semi-Active Suspension. Int. J. Control 2006, 79, 521–533. [Google Scholar] [CrossRef]
- Canale, M.; Milanese, M.; Novara, C. Semi-Active Suspension Control Using “Fast” Model-Predictive Techniques. IEEE Trans. Control Syst. Technol. 2006, 14, 1034–1046. [Google Scholar] [CrossRef]
- Ahmed, M.; Svaricek, F. Preview Control of Semi-Active Suspension Based on A Half-Car Model Using Fast Fourier Transform. In Proceedings of the 10th International Multi-Conferences on Systems, Signals & Devices, Hammamet, Tunisia, 18–21 March 2013. [Google Scholar]
- Ahmed, M.M.; Svaricek, F. Preview Optimal Control of Vehicle Semi-Active Suspension Based on Partitioning of Chassis Acceleration and Tire Load Spectra. In Proceedings of the 2014 European Control Conference, Strasbourg, France, 24–27 June 2014. [Google Scholar]
- Nguyen, M.Q.; Canale, M.; Sename, O.; Dugard, L. A Model Predictive Approach for Semiactive Suspension Control Problem of a Full Car. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control, Las Vegas, NV, USA, 12–14 December 2016. [Google Scholar]
- Du, H.P.; Sze, K.Y.; Lam, J. Semi-Active H∞ Control with Magneto-Rheological Dampers. J. Sound Vibr. 2005, 283, 981–996. [Google Scholar] [CrossRef]
- Chen, H.; Liu, Z.Y.; Sun, P.Y. Application of Constrained H∞ Control to Active Suspension Systems on Half-Car Models. J. Dyn. Syst. Meas. Control Trans. ASME. 2005, 127, 177–188. [Google Scholar] [CrossRef]
- Félix-Herrán, L.C.; Mehdi, D.; Rodríguez-Ortiz, J.D.; Soto, R.; Ramírez-Mendoza, R. H∞ Control of a Suspension with a Magnetorheological Damper. Int. J. Control 2012, 85, 1026–1038. [Google Scholar] [CrossRef]
- Choi, H.D.; Ahn, C.K.; Lim, M.T.; Song, M.K. Dynamic Output-Feedback H∞ Control for Active Half-Vehicle Suspension Systems with Time-Varying Input Delay. Int. J. Control Autom. Syst. 2016, 14, 59–68. [Google Scholar] [CrossRef]
- Shao, X.X.; Naghdy, F.; Du, H.P.; Li, H.Y. Output Feedback H∞ Control for Active Suspension of in-Wheel Motor Driven Electric Vehicle with Control Faults and Input Delay. ISA Trans. 2019, 92, 94–108. [Google Scholar] [CrossRef] [PubMed]
- Choi, S.B.; Choi, Y.T.; Park, D.W. A Sliding Mode Control of a Full-Car Electrorheological Suspension System Via Hardware in-the-Loop Simulation. J. Dyn. Syst. Meas. Control-Trans. ASME 2000, 122, 114–121. [Google Scholar] [CrossRef]
- Yokoyama, M.; Hedrick, J.K.; Toyama, S. A Model Following Sliding Mode Controller for Semi-Active Suspension Systems with MR Dampers. In Proceedings of the 2001 American Control Conference, Arlington, VA, USA, 25–27 June 2001. [Google Scholar]
- Chen, Y. Skyhook Surface Sliding Mode Control on Semi-Active Vehicle Suspension Systems for Ride Comfort Enhancement. Engineering 2009, 1, 23–32. [Google Scholar] [CrossRef]
- Rui, B. Nonlinear Adaptive Sliding-Mode Control of the Electronically Controlled Air Suspension System. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419881527. [Google Scholar] [CrossRef]
- Yang, H.H.; Liu, Q.W.; Zhang, Y.C.; Yu, F. An Adaptive Sliding Mode Fault-Tolerant Control for Semi-Active Suspensions with Magnetorheological Dampers Based on T-S Fuzzy Vehicle models. J. Vib. Control 2023, 29, 251–264. [Google Scholar] [CrossRef]
- Li, H.Y.; Yu, J.Y.; Hilton, C.; Liu, H.H. Adaptive Sliding-Mode Control for Nonlinear Active Suspension Vehicle Systems Using T-S Fuzzy Approach. IEEE Trans. Ind. Electron. 2013, 60, 3328–3338. [Google Scholar] [CrossRef]
- Koch, G.; Kloiber, T. Driving State Adaptive Control of an Active Vehicle Suspension System. IEEE Trans. Control Syst. Technol. 2014, 22, 44–57. [Google Scholar] [CrossRef]
- Yildiz, A.S.; Sivrioglu, S.; Zergeroglu, E.; Çetin, S. Nonlinear Adaptive Control of Semi-Active MR Damper Suspension with Uncertainties in Model Parameters. Nonlinear Dyn. 2015, 79, 2753–2766. [Google Scholar] [CrossRef]
- Nichielea, T.C.; Unguritu, M.G. Design and Comparisons of Adaptive Harmonic Control for a Quarter-Car Active Suspension. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 343–352. [Google Scholar] [CrossRef]
- Meystel, A.M.; Albus, J.S. Intelligent Systems: Architecture, Design, and Control; John Wiley & Sons, Inc.: New York, NY, USA, 2000. [Google Scholar]
- Zadeh, L.A. Fuzzy Sets, Information and Control. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Dubois, D.J. Fuzzy Sets and Systems: Theory and Applications; Academic Press Inc.: San Diego, CA, USA, 1997. [Google Scholar]
- De Silva, C.W. Intelligent Control: Fuzzy Logic Applications; CRC Press LLC: Boca Raton, FL, USA, 2018. [Google Scholar]
- Rao, M.V.C.; Prahlad, V. A Tunable Fuzzy Logic Controller for Vehicle-Active Suspension Systems. Fuzzy Sets Syst. 1997, 85, 11–21. [Google Scholar] [CrossRef]
- Caponetto, R.; Diamante, O.; Fargione, G.; Risitano, A.; Tringali, D. A Soft Computing Approach to Fuzzy Sky-Hook Control of Semiactive Suspension. IEEE Trans. Control Syst. Technol. 2003, 11, 786–798. [Google Scholar] [CrossRef]
- Guclu, R. Fuzzy Logic Control of Seat Vibrations of a Non-Linear Full Vehicle Model. Nonlinear Dyn. 2005, 40, 21–34. [Google Scholar] [CrossRef]
- Demir, O.; Keskin, I.; Cetin, S. Modeling and Control of a Nonlinear Half-Vehicle Suspension System: A Hybrid Fuzzy Logic Approach. Nonlinear Dyn. 2012, 67, 2139–2151. [Google Scholar] [CrossRef]
- Kasemi, B.; Muthalif, A.G.A.; Rashid, M.M.; Fathima, S. Fuzzy-PID Controller for Semi-Active Vibration Control Using Magnetorheological Fluid Damper. Procedia Eng. 2012, 41, 1221–1227. [Google Scholar] [CrossRef]
- Kurczyk, S.; Pawełczyk, M. Fuzzy Control for Semi-Active Vehicle Suspension. J. Low Freq. Noise Vib. Act. Control 2013, 32, 217–225. [Google Scholar] [CrossRef]
- Tang, X.; Du, H.P.; Sun, S.S.; Ning, D.H.; Xing, Z.W.; Li, W.H. Takagi-Sugeno Fuzzy Control for Semi-Active Vehicle Suspension with a Magnetorheological Damper and Experimental Validation. IEEE-ASME Trans. Mechatron. 2017, 22, 291–300. [Google Scholar] [CrossRef]
- Pang, H.; Liu, F.; Xu, Z.R. Variable Universe Fuzzy Control for Vehicle Semi-Active Suspension System with MR Damper Combining Fuzzy Neural Network and Particle Swarm Optimization. Neurocomputing 2018, 306, 130–140. [Google Scholar] [CrossRef]
- Nguyen, V.; Jiao, R.Q.; Zhang, J.R. Control Performance of Damping and Air Spring of Heavy Truck Air Suspension System with Optimal Fuzzy Control. SAE Int. J. Veh. Dyn. Stab. NVH 2020, 4, 179–194. [Google Scholar] [CrossRef]
- Li, G.; Ruan, Z.Y.; Gu, R.H.; Hu, G.L. Fuzzy Sliding Mode Control of Vehicle Magnetorheological Semi-Active Air Suspension. Appl. Sci. 2021, 11, 10925. [Google Scholar] [CrossRef]
- Qin, Y.C.; Xiang, C.L.; Wang, Z.F.; Dong, M.M. Road Excitation Classification for Semi-Active Suspension System Based on System Response. J. Vib. Control 2018, 24, 2732–2748. [Google Scholar] [CrossRef]
- Jin, Y.; Yu, D.J. Adaptive Neuron Control Using an Integrated Error Approach with Application to Active Suspensions. Int. J. Automot. Technol. 2008, 9, 329–335. [Google Scholar] [CrossRef]
- Al Aela, A.M.; Kenne, J.P.; Mintsa, H.A. Adaptive Neural Network and Nonlinear Electrohydraulic Active Suspension Control System. J. Vib. Control 2022, 28, 243–259. [Google Scholar] [CrossRef]
- Lin, Y.C.; Nguyen, H.T.; Yang, J.F.; Chiou, H.J. A Reinforcement Learning Backstepping-Based Control Design for a Full Vehicle Active Macpherson Suspension System. IET Control Theory Appl. 2022, 16, 1417–1430. [Google Scholar] [CrossRef]
- Ab Talib, M.H.; Darus, I.Z.M. Intelligent Fuzzy Logic with Firefly Algorithm and Particle Swarm Optimization for Semi-Active Suspension System Using Magneto-Rheological Damper. J. Vib. Control 2017, 23, 501–514. [Google Scholar] [CrossRef]
- Samsuria, E.; Sam, Y.M.; Ramli, L. Active Suspension Control by Using Linear Quadratic Regulator and Sliding Mode Control Techniques with Optimisation. In Proceedings of the 2018 IEEE Conference on Systems, Process and Control, Melaka, Malaysia, 14–15 December 2018. [Google Scholar]
- Dahunsi, O.A.; Dangor, M.; Pedro, J.O.; Ali, M.M. Proportional Plus Integral Plus Derivative Control of Nonlinear Full-Car Electrohydraulic Suspensions Using Global and Evolutionary Optimization Techniques. J. Low Freq. Noise Vib. Act. Control 2020, 39, 393–415. [Google Scholar] [CrossRef]
- Cao, K.; Li, Z.Q.; Gu, Y.L.; Zhang, L.Y.; Chen, L.Q. The Control Design of Transverse Interconnected Electronic Control Air Suspension Based on Seeker Optimization Algorithm. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 2200–2211. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Suspension Type | Advantages | Disadvantages | Applications |
|---|---|---|---|
| Passive | Simple, reliable, low cost | Fixed damping, less effective in varying conditions | Most common, entry-level vehicles |
| Semi-active | Improved damping, energy-efficient, reliable | Complex design, control-dependent | Mid to high-end vehicles, aerospace |
| Active | Best performance, real-time adjustment | High energy consumption, expensive, less reliable | High-end vehicles, racing cars, limited use |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Liu, C.; Zheng, X.; Zhao, L.; Qiu, Y. Advancements in Semi-Active Automotive Suspension Systems with Magnetorheological Dampers: A Review. Appl. Sci. 2024, 14, 7866. https://doi.org/10.3390/app14177866
Wang Z, Liu C, Zheng X, Zhao L, Qiu Y. Advancements in Semi-Active Automotive Suspension Systems with Magnetorheological Dampers: A Review. Applied Sciences. 2024; 14(17):7866. https://doi.org/10.3390/app14177866
Chicago/Turabian StyleWang, Zunming, Chi Liu, Xu Zheng, Liang Zhao, and Yi Qiu. 2024. "Advancements in Semi-Active Automotive Suspension Systems with Magnetorheological Dampers: A Review" Applied Sciences 14, no. 17: 7866. https://doi.org/10.3390/app14177866
APA StyleWang, Z., Liu, C., Zheng, X., Zhao, L., & Qiu, Y. (2024). Advancements in Semi-Active Automotive Suspension Systems with Magnetorheological Dampers: A Review. Applied Sciences, 14(17), 7866. https://doi.org/10.3390/app14177866