


Vital Views into Drone-Based GPR Application: Precise Mapping of Soil-to-Rock Boundaries and Ground Water Level for Foundation Engineering and Site-Specific Response



Abstract
:1. Introduction
2. Materials and Methods
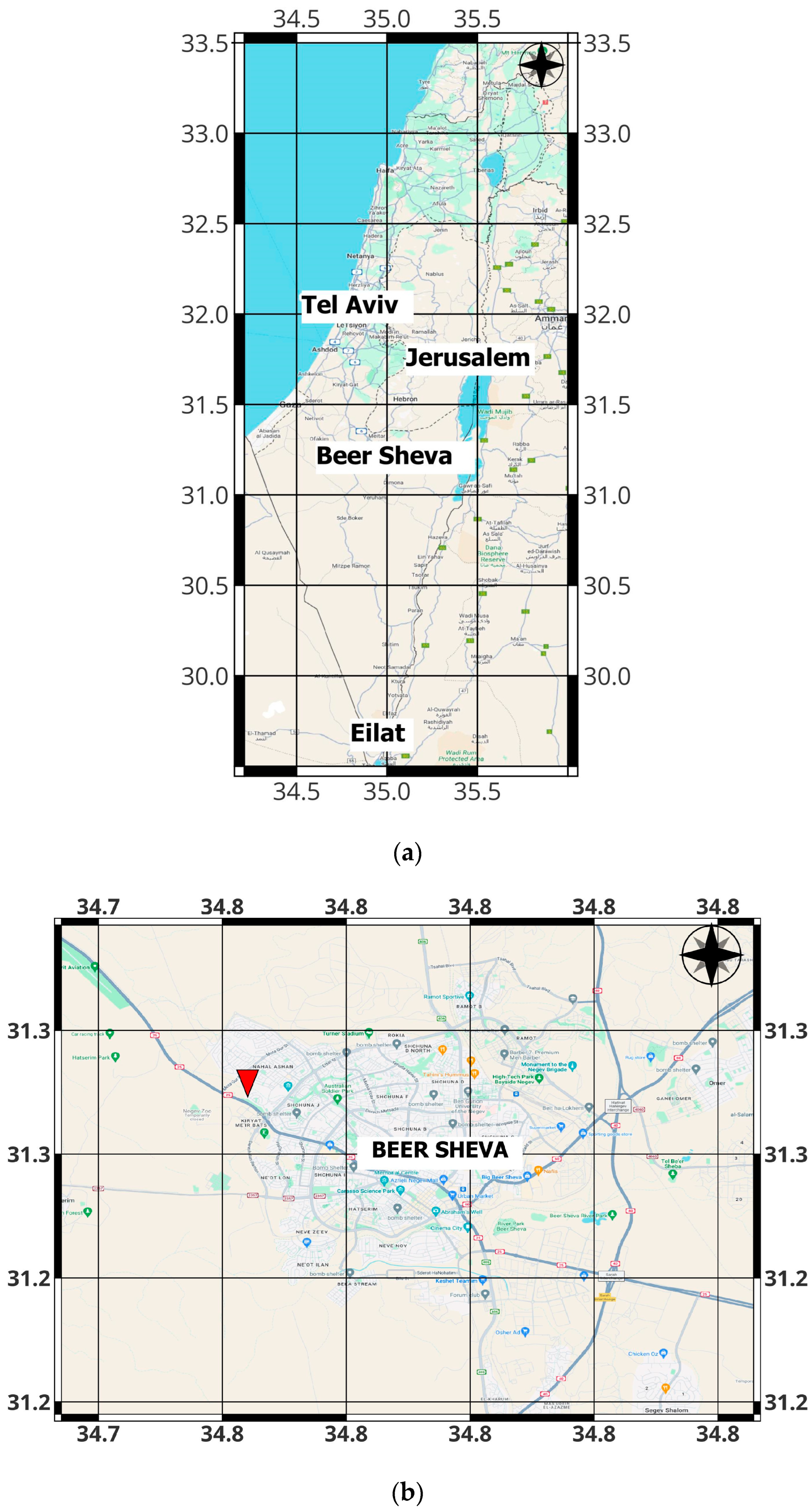
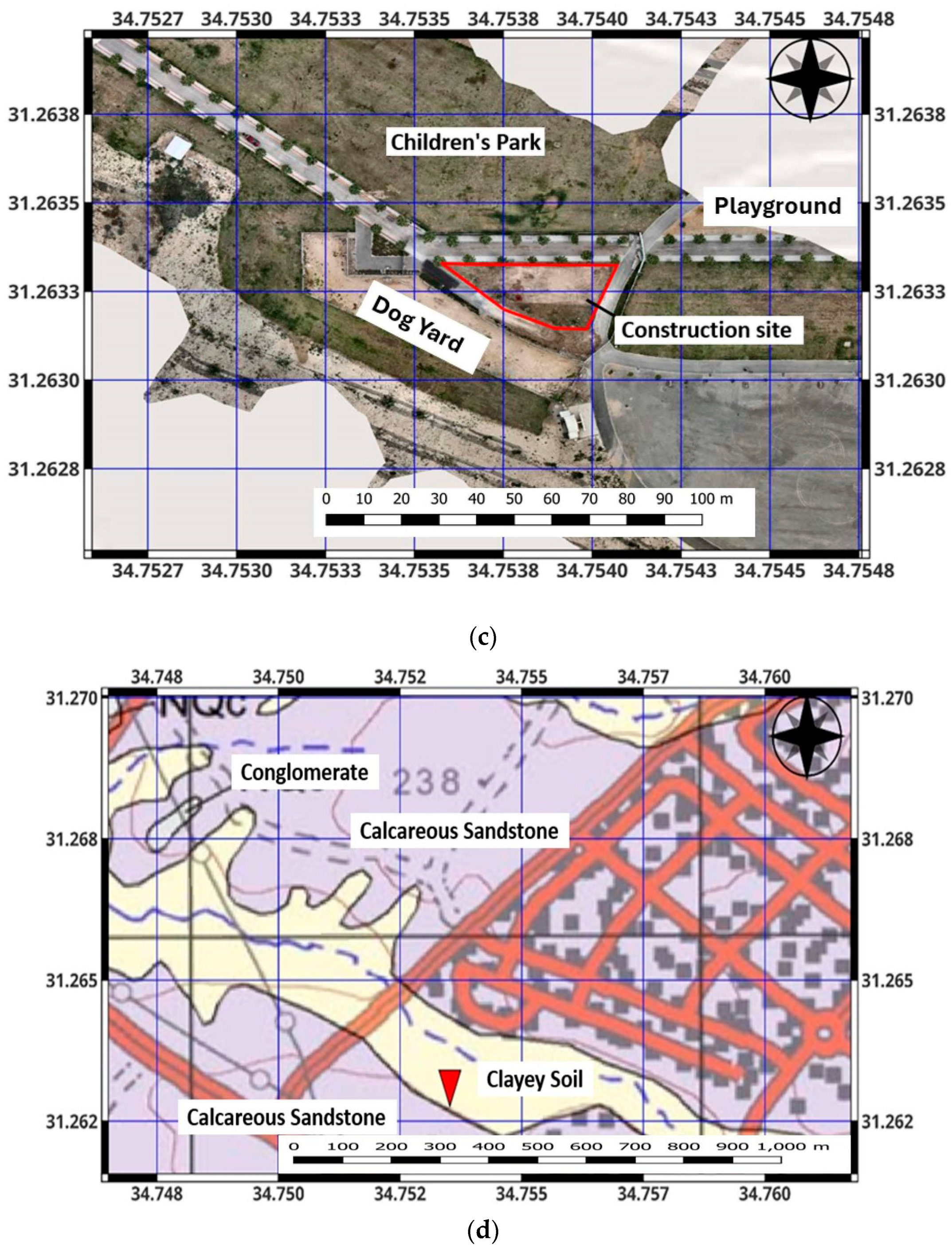
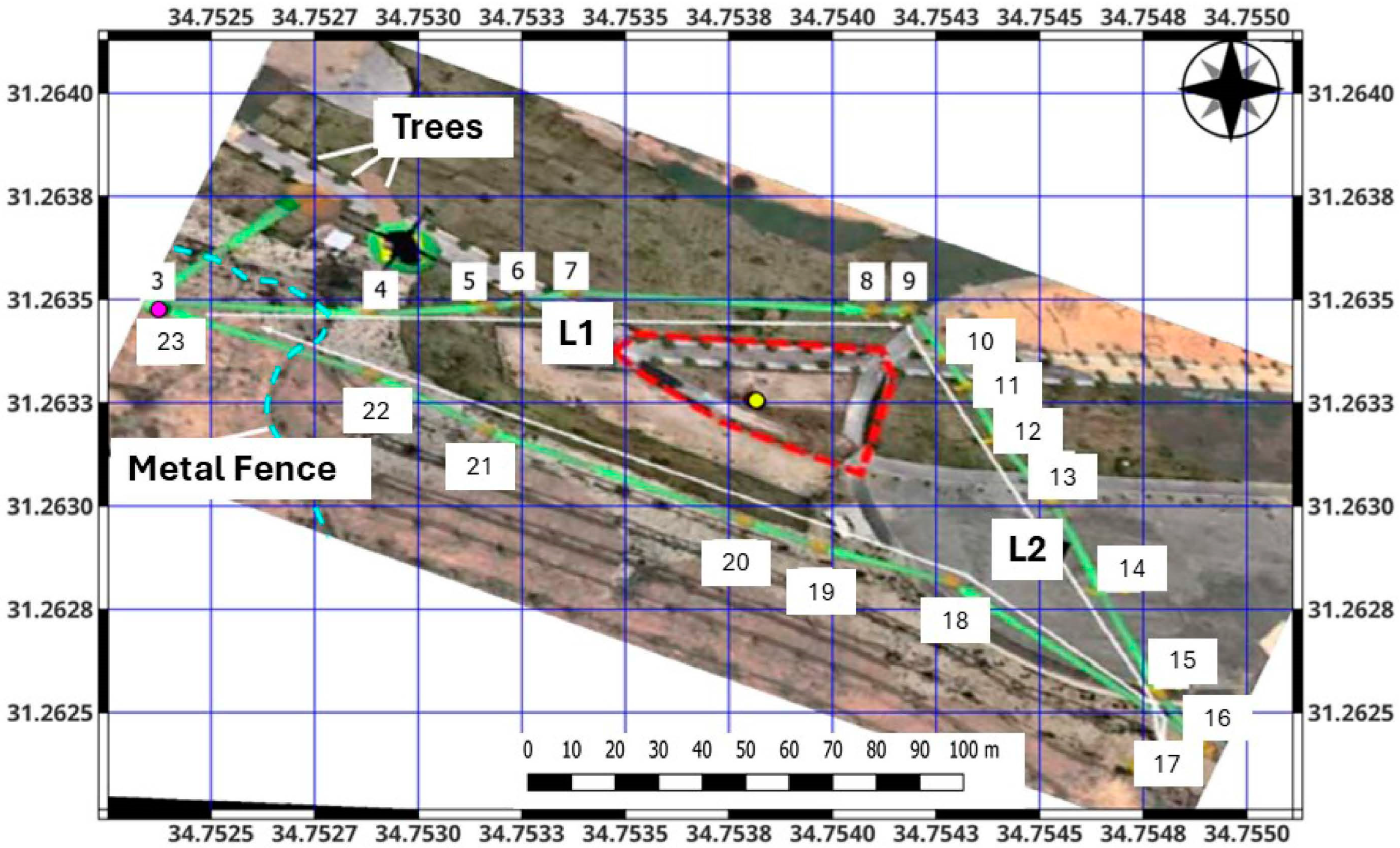
2.1. The Site under Study
2.2. The Design of the Drone-Based GPR System
2.3. A Brief Description of the Theoretical Principles of Drone-Based GPR Measurements
2.4. The Processing of Data Collected by Drone-Based GPR
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Solla, M.; Pérez-Gracia, V.; Fontul, S. A review of GPR application on transport infrastructures: Troubleshooting and best practices. Remote Sens. 2021, 13, 672. [Google Scholar] [CrossRef]
- Sass, O.; Friedmann, A.; Haselwanter, G.; Wetzel, K.-F. Investigating thickness and internal structure of alpine mires using conventional and geophysical techniques. Catena 2010, 80, 195–203. [Google Scholar] [CrossRef]
- Algeo, J.; Van Dam, R.L.; Slater, L. Early-Time GPR: A Method to Monitor Spatial Variations in Soil Water Content during Irrigation in Clay Soils. Vadose Zone J. 2016, 15, 1–9. [Google Scholar] [CrossRef]
- Bersezio, R.; Giudici, M.; Mele, M. Combining sedimentological and geophysical data for high-resolution 3-D mapping of fluvial architectural elements in the Quaternary Po plain (Italy). Sediment. Geol. 2007, 202, 230–248. [Google Scholar] [CrossRef]
- Mele, M.; Bersezio, R.; Giudici, M. Hydrogeophysical imaging of alluvial aquifers: Electrostratigraphic units in the quaternary Po alluvial plain (Italy). Int. J. Earth Sci. 2012, 101, 2005–2025. [Google Scholar] [CrossRef]
- Ortuani, B.; Benedetto, A.; Giudici, M.; Mele, M.; Tosti, F. A non-invasive approach to monitor variability of soil water content with electromagnetic methods. Procedia Environ. Sci. 2013, 19, 446–455. [Google Scholar] [CrossRef]
- Benedetto, A.; Tosti, F.; Ortuani, B.; Giudici, M.; Mele, M. Mapping the spatial variation of soil moisture at the large scale using GPR for pavement applications. Near Surf. Geophys. 2015, 13, 269–278. [Google Scholar] [CrossRef]
- Das, B.M. Principles of Foundation Engineering, 7th ed.; Cengage: Boston, MA, USA, 2016. [Google Scholar]
- Ranjan, G.; Rao, A.S. Basic and Applied Soil Mechanics, 3rd ed.; New Age International Publication: New Delhi, India, 2016. [Google Scholar]
- Murthy, V.N.S. Textbook of Soil Mechanics and Foundation Engineering; Marcel Dekker. Inc.: New York, NY, USA, 2005. [Google Scholar]
- Terzaghi, K. Theoretical Soil Mechanics, 1st ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1943. [Google Scholar] [CrossRef]
- Meyerhof, G.G. The Ultimate Bearing Capacity of Foundations. Géotechnique 1951, 2, 301–332. [Google Scholar] [CrossRef]
- Šepac, Z. Foundation engineering structure. In Proceedings of the 7th International Conference on Road and Rail Infrastructure, Cavtat, Croatia, 15–17 May 2024. [Google Scholar]
- Ngo, V.L.; Lee, C.; Kim, J.M. Effects of stratification on soil–foundation–structure interaction: Centrifugal observation and numerical simulation. Appl. Sci. 2021, 11, 623. [Google Scholar] [CrossRef]
- Patil, N.N.; Rajashekar Swamy, H.M.; Shivashankar, R. Effect of Reinforced Soil–Structure Interaction on Foundation Settlement Characteristics of a Three-Dimensional Structure. In Innovations in Soft Computing and Information Technology: Proceedings of ICEMIT 2017; Springer: Singapore, 2019; Volume 3, pp. 135–161. [Google Scholar]
- Hasheminezhad, A.; Bahadori, H. Deep soil mixing columns improved the seismic response of shallow foundations over liquefiable soils. Comput. Geotech. 2019, 110, 251–273. [Google Scholar] [CrossRef]
- Mehrzad, B.; Haddad, A.; Jafarian, Y. Centrifuge and numerical models to investigate liquefaction-induced response of shallow foundations with different contact pressures. Int. J. Civ. Eng. 2016, 14, 117–131. [Google Scholar] [CrossRef]
- Borghei, A.; Ghayoomi, M.; Turner, M. Effects of Groundwater Level on Seismic Response of Soil–Foundation Systems. J. Geotech. Geoenviron. Eng. 2020, 146, 04020110. [Google Scholar] [CrossRef]
- Demir, S. Effect of Groundwater Level on Site Response Behavior of a One-Layered Liquefiable Soil. J. Eng. Sci. Des. 2021, 9, 796–808. [Google Scholar] [CrossRef]
- Yoshikawa, T.; Noda, T.; Kodaka, T.; Takaine, T. Analysis of the effect of groundwater level on the seismic behavior of an unsaturated embankment on clayey ground. Soil Dyn. Earthq. Eng. 2016, 85, 217–230. [Google Scholar] [CrossRef]
- Frid, A.; Frid, V. Moisture effect on asphalt dielectric permittivity: Simulating, sensitivity analysis, and experimental validation. Int. J. Pavement Res. Technol. 2024, 17, 999–1013. [Google Scholar] [CrossRef]
- Bekić, G. Railroad Survey Application. Application Notes. Available online: www.geoscanners.com (accessed on 5 March 2015).
- Kovacevic, M.S.; Gavin, K.; Stipanovic Oslakovic, I.; Bacic, M. A new methodology for assessment of railway infrastructure condition. Transp. Res. Procedia 2016, 14, 1930–1939. [Google Scholar] [CrossRef]
- Frid, M.; Kamai, R. Characterizing Nonlinear Effects in Vertical Site Response of Dry Soils Using KiK-Net Data. J. Earthq. Eng. 2023, 27, 2570–2586. [Google Scholar] [CrossRef]
- Frid, M.; Kamai, R. An analytical approach for estimating the spectral P/S ratio within ground motions. Comput. Geotech. 2020, 119, 103379. [Google Scholar] [CrossRef]
- Allen, N.F.; Woods, R.D.; Richart, F.E., Jr. Fluid wave propagation in saturated and nearly saturated sands. J. Geotech. Eng. Div. 1980, 106, 235–254. [Google Scholar] [CrossRef]
- Beresnev, I.A.; Nightengale, A.M.; Silva, W.J. Properties of vertical ground motions. Bull. Seismol. Soc. Am. 2002, 92, 3152–3164. [Google Scholar] [CrossRef]
- Han, B.; Zdravkovic, L.; Kontoe, S. Numerical and analytical investigation of compressional wave propagation in saturated soils. Comput. Geotech. 2016, 75, 93–102. [Google Scholar] [CrossRef]
- Liu, H.-W.; Tsai, C.-C. Site effect of vertical motion amplification behavior observed from downhole arrays. J. GeoEng. 2018, 13, 39–48. [Google Scholar]
- Gülerce, Z.; Kamai, R.; Abrahamson, N.A.; Silva, W.J. Ground motion prediction equations for the vertical ground motion component based on the NGA-W2 database. Earthq. Spectra 2017, 33, 499–528. [Google Scholar] [CrossRef]
- ASTM D6429-99; Standard Guide for Selecting Surface Geophysical Methods. ASTM International: West Conshohocken, PA, USA, 2017. [CrossRef]
- Cheng, Q.; Su, Q.; Binley, A.; Liu, J.; Zhang, Z.; Chen, X. Estimation of surface soil moisture by a multi-elevation UAV-based ground penetrating radar. Water Resour. Res. 2023, 59, e2022WR032621. [Google Scholar] [CrossRef]
- Guo, W.; Dong, C.; Lin, C.; Zhang, T.; Zhao, Z.; Li, J. 3D Sedimentary Architecture of Sandy Braided River, Based on Outcrop, Unmanned Aerial Vehicle and Ground Penetrating Radar Data. Minerals 2022, 12, 739. [Google Scholar] [CrossRef]
- Abdulraheem, M.I.; Chen, H.; Li, L.; Moshood, A.Y.; Zhang, W.; Xiong, Y.; Zhang, Y.; Taiwo, L.B.; Farooque, A.A.; Hu, J. Recent Advances in Dielectric Properties-Based Soil Water Content Measurements. Remote Sens. 2024, 16, 1328. [Google Scholar] [CrossRef]
- Lombardi, F.; Ortuani, B.; Facchi, A.; Lualdi, M. Assessing the Perspectives of Ground Penetrating Radar for Precision Farming. Remote Sens. 2022, 14, 6066. [Google Scholar] [CrossRef]
- Lombardi, F.; Podd, F.; Solla, M. From Its Core to the Niche: Insights from GPR Applications. Remote Sens. 2022, 14, 3033. [Google Scholar] [CrossRef]
- Klewe, T.; Strangfeld, C.; Kruschwitz, S. Review of moisture measurements in civil engineering with ground penetrating radar—Applied methods and signal features. Constr. Build. Mater. 2021, 278, 122250. [Google Scholar] [CrossRef]
- Bayarri, V.; Prada, A.; García, F.; De Las Heras, C.; Fatás, P. Remote Sensing and Environmental Monitoring Analysis of Pigment Migrations in Cave of Altamira’s Prehistoric Paintings. Remote Sens. 2024, 16, 2099. [Google Scholar] [CrossRef]
- Zayed, T.; Dawood, T.; Abouhamad, M.; Alsharqawi, M. Special Issue “Ground Penetrating Radar (GPR) Applications in Civil Infrastructure Systems”. Remote Sens. 2022, 14, 5682. [Google Scholar] [CrossRef]
- Altdorff, D.; Schliffke, N.; Riedel, M.; Schmidt, V.; van der Kruk, J.; Vereecken, H.; Becken, M. UAV-borne electromagnetic induction and ground-penetrating radar measurements: A feasibility test. Water Resour. Res 2014, 42, W11403. [Google Scholar]
- Eröss, R.; Stoll, J.B.; Bergers, R.; Tezkan, B. Three-component VLF using an unmanned aerial system as sensor platform. First Break 2013, 31. [Google Scholar] [CrossRef]
- Booth, A.D.; Koylass, T.M. Drone-mounted ground-penetrating radar surveying: Flight-height considerations for diffraction-based velocity analysis. Geophysics 2022, 87, WB69–WB79. [Google Scholar] [CrossRef]
- Shin, Y.H.; Shin, S.Y.; Rastiveis, H.; Cheng, Y.T.; Zhou, T.; Liu, J.; Habib, A. UAV-Based Remote Sensing for Detection and Visualization of Partially-Exposed Underground Structures in Complex Archaeological Sites. Remote Sens. 2023, 15, 1876. [Google Scholar] [CrossRef]
- Wu, S.; Wang, L.; Zeng, X.; Wang, F.; Liang, Z.; Ye, H. UAV-Mounted GPR for Object Detection Based on Cross-Correlation Background Subtraction Method. Remote Sens. 2022, 14, 5132. [Google Scholar] [CrossRef]
- Frid, M.; Frid, V. A Case Study of the Integration of Ground-Based and Drone-Based Ground-Penetrating Radar (GPR) for an Archaeological Survey in Hulata (Israel): Advancements, Challenges, and Applications. Appl. Sci. 2024, 14, 4280. [Google Scholar] [CrossRef]
- Ruols, B.; Baron, L.; Irving, J. High-density 3D and 4D GPR data acquisitions over alpine glaciers using a newly developed drone-based system (No. EGU23-9619). In Proceedings of the Copernicus Meetings, Vienna, Austria, 23–28 April 2023. [Google Scholar]
- Vergnano, A.; Franco, D.; Godio, A. Drone-Borne Ground Penetrating Radar for Snow Cover Mapping. Remote Sens. 2022, 14, 1763. [Google Scholar] [CrossRef]
- Saponaro, A.; Dipierro, G.; Cannella, E.; Panarese, A.; Galiano, A.M.; Massaro, A. A UAV-GPR Fusion Approach for the Characterization of a Quarry Excavation Area in Falconara Albanese, Southern Italy. Drones 2021, 5, 40. [Google Scholar] [CrossRef]
- Edemsky, D.; Popov, A.; Prokopovich, I.; Garbatsevich, V. Airborne ground penetrating radar, field test. Remote Sens. 2021, 13, 667. [Google Scholar] [CrossRef]
- Sulaiman, N.; Nordiana, M.M.; Azwin, I.N.; Taqiuddin, Z.M.; Maslinda, U.; Hisham, H.; Nordiana, A.N. Integration of Ground Penetrating Radar (GPR) and 2-D Resistivity Imaging methods for soil investigation. In IOP Conference Series: Earth and Environmental Science, Proceedings of the Southeast Asian Conference on Geophysics, Bali, Indonesia, 31 August–3 September 2016; IOP Publishing Ltd.: Bristol, UK, 2017; Volume 62, p. 012007. [Google Scholar]
- Zhang, M.; Feng, X.; Bano, M.; Xing, H.; Wang, T.; Liang, W.; Zhang, Y. Review of ground penetrating radar applications for water dynamics studies in unsaturated zone. Remote Sens. 2022, 14, 5993. [Google Scholar] [CrossRef]
- Klotzsche, A.; Jonard, F.; Looms, M.C.; van der Kruk, J.; Huisman, J.A. Measuring soil water content with ground penetrating radar: A decade of progress. Vadose Zone J. 2018, 17, 1–9. [Google Scholar] [CrossRef]
- ASTM D2487-00; Standard Practice for Classification of Soils for Engineering Purposes (Unified Soil Classification System). ASTM International: West Conshohocken, PA, USA, 2000.
- Zilberman, E. Geological Map of Israel, Beer Sheva, Sheet 14-IV, 1:50,000; Israel Geological Survey: Jerusalem, Israel, 2018. [Google Scholar]
- Annan, A.P. Electromagnetic principles of ground penetrating radar. In Ground Penetrating Radar: Theory and Applications; Jol, H.M., Ed.; Elsevier Science: Amsterdam, The Netherlands; The Boulevard: Oxford, UK, 2009. [Google Scholar]
- Daniels, D. Ground Penetrating Radar; The Institute of Electrical Engineers: London, UK, 2004. [Google Scholar]
- Huisman, J.A.; Hubbard, S.S.; Redman, J.D.; Annan, A.P. Measuring soil water content with ground penetrating radar: A review. Vadose Zone J. 2003, 2, 476–491. [Google Scholar] [CrossRef]
- Benedetto, A.; Pajewski, L. Civil Engineering Applications of Ground Penetrating Radar; Springer: Cham, Switzerland; Berlin/Heidelberg, Germany; New York, NY, USA; Dordrecht, The Netherlands; London, UK, 2015; 373p. [Google Scholar] [CrossRef]
- Zhang, D.; Zeng, Y.; Zhang, F.; Xiong, J. Contactless Vital Signs Monitoring. In WiFi CSI-Based Vital Signs Monitoring; Elsevier Inc.: Amsterdam, The Netherlands, 2022; Chapter 11; pp. 231–255. [Google Scholar] [CrossRef]
- Benedetto, A. Water content evaluation in unsaturated soil using GPR signal analysis in the frequency domain. J. Appl. Geophys. 2010, 71, 26–35. [Google Scholar] [CrossRef]
- Wu, K.; Rodriguez, G.A.; Zajc, M.; Jacquemin, E.; Clément, M.; De Coster, A.; Lambot, S. A new drone-borne GPR for soil moisture mapping. Remote Sens. Environ. 2019, 235, 111456. [Google Scholar] [CrossRef]
- Noviello, C.; Gennarelli, G.; Esposito, G.; Ludeno, G.; Fasano, G.; Capozzoli, L.; Soldovieri, F.; Catapano, I. An Overview on Down-Looking UAV-Based GPR Systems. Remote Sens. 2022, 14, 3245. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Eq. | Frequency, MHz | |||
|---|---|---|---|---|---|
| 50 | 100 | 150 | |||
| 1 | Wavelength in air, m | 2 | 6 | 3 | 2 |
| 2 | Speed velocity in clay, mm/ns | 1 | 77.5 | ||
| 3 | Wavelength in clay, m | 2 | 1.55 | 0.78 | 0.52 |
| 4 | Footprint at Earth’s surface R1, m | 3 | 4.24 | 2.7 | 2.1 |
| 5 | Footprint at target depth R2, m | 4 | 6.7 | 4.4 | 3.5 |
| 6 | Vertical resolution, m | 5 | 0.77 | 0.39 | 0.26 |
| 7 | Minimum size of a detectable object, m | 6 | 2 | 2 | 2 |
| Filter Type | |
|---|---|
| 1 | Data Editing |
| 2 | Dewow |
| 3 | Static Correction |
| 4 | Background Removal |
| 5 | X-Interpolation by GPS Coordinates |
| 6 | Median Filter |
| 7 | Automatic Gain Control |
| 8 | Stolt (f-k domain) Migration |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Frid, M.; Frid, V. Vital Views into Drone-Based GPR Application: Precise Mapping of Soil-to-Rock Boundaries and Ground Water Level for Foundation Engineering and Site-Specific Response. Appl. Sci. 2024, 14, 7889. https://doi.org/10.3390/app14177889
Frid M, Frid V. Vital Views into Drone-Based GPR Application: Precise Mapping of Soil-to-Rock Boundaries and Ground Water Level for Foundation Engineering and Site-Specific Response. Applied Sciences. 2024; 14(17):7889. https://doi.org/10.3390/app14177889
Chicago/Turabian StyleFrid, Michael, and Vladimir Frid. 2024. "Vital Views into Drone-Based GPR Application: Precise Mapping of Soil-to-Rock Boundaries and Ground Water Level for Foundation Engineering and Site-Specific Response" Applied Sciences 14, no. 17: 7889. https://doi.org/10.3390/app14177889
APA StyleFrid, M., & Frid, V. (2024). Vital Views into Drone-Based GPR Application: Precise Mapping of Soil-to-Rock Boundaries and Ground Water Level for Foundation Engineering and Site-Specific Response. Applied Sciences, 14(17), 7889. https://doi.org/10.3390/app14177889