Abstract
Sweeping jet (SWJ) actuators have become a hot research topic in flow control due to their larger sweep range and higher control efficiency. However, the linear relationship between frequency and velocity ratio (VR = Ujet/U∞) in the SWJ actuator makes it challenging to determine the dominant factor affecting the control effect. Decoupling the frequency and VR and determining the control mechanism of the SWJ actuator is, therefore, a difficult task. In this study, a novel type of SWJ actuator was designed using periodic synthetic jets instead of feedback channels. This achieved the implementation of different frequencies under the same VR, effectively decoupling frequency and VR. The SWJ actuator was then applied in flow separation control of a Hump airfoil, with F+ = f × c/U∞ = 0.375, F+ = 1, and F+ = 10 being the three forcing frequencies studied. Numerical results demonstrated that all three forcing frequencies displayed a control effect on flow separation. At VR = 1.8, the control effectiveness is optimal for F+ = 1, and as VR continues to increase, F+ = 10 becomes the optimal control frequency.
1. Introduction
A boundary layer separates when the fluid within it lacks the energy to counteract the kinetic energy losses caused by adverse pressure gradients and viscous dissipation in a given application. This separation can lead to substantial energy losses, resulting in increased drag, decreased lift, or reduced total pressure recovery, thus diminishing system performance. To mitigate this, separation control methods [1,2,3] are often implemented to energize the slowed fluid near the wall within the boundary layer. The main approaches for energizing the boundary layer and controlling flow separation involve adding momentum and vorticity to the boundary layer. This vorticity can be introduced either passively or actively.
Passive control methods such as vortex generators [4,5] and winglets [6,7] have been widely used in various scenarios to suppress boundary layer separation. However, passive control methods have the problem of modifying the geometric surface and not being able to suppress boundary layer separation according to actual operating conditions, and may even have side effects. On the contrary, active control methods can effectively suppress boundary layer separation by transmitting an additional momentum, which can be turned on and off according to actual operating conditions. Currently, it has become a research hotspot, and many active flow control methods and technologies have been proposed and validated, such as Synthetic jet [8,9], Plasma [10,11], Sweeping jet (SWJ) actuator [12,13,14], and so on.
In the flow control of synthetic jets, many studies have focused on momentum coefficient (Cμ) and frequency, as well as the position of actuators. Carlo Salvatore Greco et al. [15] investigated the impact of synthetic jets at various frequencies and momentum coefficients on the size of separation vortices and the drag resistance of a cylinder. They discovered that the maximum reduction in drag resistance occurred when the momentum coefficient, Cμ, was 10.8% and the frequency, f+, was 0.98. The definition of f+ is the ratio of the synthesized jet frequency to the Karman vortex street frequency.
Wen Wu et al. [16] studied the response of turbulent separation bubbles (TSB) to three driving frequencies of synthetic jets through direct numerical simulation. It was found that when the sinusoidal frequency was the two natural frequencies of the undisturbed separated bubbles, a very large scale lateral rotating vortex was formed, resulting in a 50% reduction in the average TSB length.
In addition to synthetic jets, SWJ actuators also have frequency characteristics.
As effective tools for flow control [17], sweeping jet actuators have been extensively studied [18,19,20,21]. Figure 1 illustrates the fundamental mechanism of the SWJ actuator.
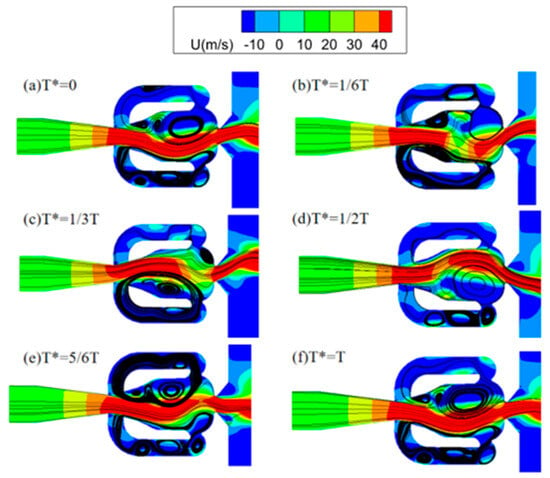
Figure 1.
Conceptual design of a representative SWJ actuator [22].
SWJ actuators without moving parts can generate a self-induced and self-sustaining oscillating jet, making it more practical and appealing than other flow control methods [23]. Significant research has been conducted to deepen the understanding of the jet oscillation mechanism in SWJ actuators [24,25,26] and their role in active flow control. Ostermann et al. [27,28] used phase-averaged particle image velocimetry (PIV) and time-resolved pressure measurements to visualize internal flow field structures within an enlarged SWJ actuator, providing detailed insights into the jet oscillation pattern. Wen et al. [29] conducted experiments using water as the working fluid to simultaneously measure the internal and external flow fields of an SWJ actuator, examining the synchronization and interaction of twin SWJ actuators. Tomac and Luzan [30] also explored the synchronization of a pair of opposed actuators.
On the other hand, numerical studies conducted by Kara et al. [31,32] in a quiescent environment have validated the feasibility of using an SWJ actuator for flow separation control. Efforts have also been made to develop SWJ actuator systems for suppressing flow separation over trailing edge flap [33], vertical tail [32,34], and hump [35]. It has been shown that SWJ actuators can effectively control flow separation over trailing edge flaps at deflection angles of up to 40°, providing the necessary control authority.
Mehti Koklu et al. [33] applied an SWJ actuator to a hump airfoil, comparing its performance to 2004 data. They found that, at the same flow rate, the SWJ actuator produced greater flow acceleration and smaller separation bubbles, proving more effective for flow control than steady suction or unsteady zero-net-mass-flow actuators. Kara et al. [25] used a two-dimensional NASA hump model with an integrated SWJ actuator to explore the potential of these actuators in reducing flow separation, demonstrating their clear effectiveness in flow control. Daniel J. Portillo et al. [36] experimentally studied the oscillation frequency, oscillation angle, and modal structure of fluid oscillators at different lengths. They found that the oscillation frequency is directly proportional to the flow velocity and inversely proportional to the scale size, while the oscillation angle is inversely proportional to the flow rate and directly proportional to the scale size. Bartosz J. Slupski et al. [37] made similar findings regarding oscillation frequency.
The frequency of the sweeping jet is related to its size and momentum coefficient. As the model is scaled and the momentum coefficient changes during flow control, the frequency of the sweeping jet actuator will also change. This variability raises uncertainty about whether the sweeping jet actuator has an optimal frequency similar to the driving frequency of a synthetic jet. Moreover, if such an optimal frequency exists, it may not be consistently maintained due to changes in size or increases in the momentum coefficient, potentially hindering optimal control efficiency. Therefore, determining if there is an optimal frequency for the sweeping jet actuator in flow control and how to maintain it becomes a critical issue.
In response to this issue, in this article, a new Sweeping jet actuator was designed to determine the effects of frequency and momentum coefficient on flow control effectiveness. It can achieve frequency variation while maintaining the momentum coefficient. The Hump airfoil, as a classic airfoil, has well-studied separation characteristics, which facilitates comparison of this study’s results with other research. Therefore, in this study, the new sweeping jet actuator is applied to the Hump airfoil to investigate the effects of frequency and velocity ratio on flow control.
2. Set Up and Numerical Simulation Methods
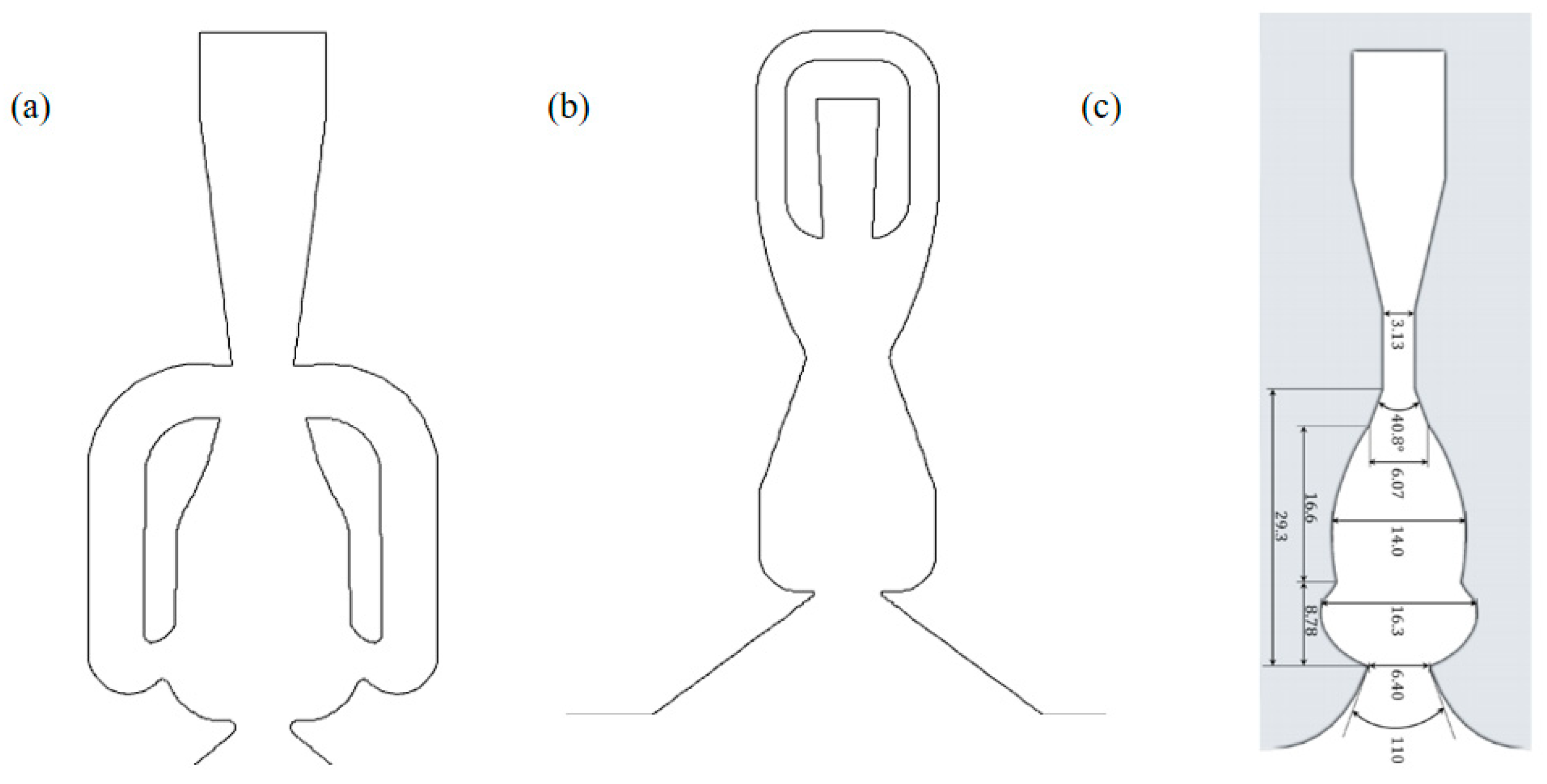
In the course of Sweeping jet actuator research, the prevailing design aspects encompass traditional dual-feedback actuators [21,22,23,24,25,26,27,28,29,30,31,32,33,34,35], single-feedback actuators, and feedback-free actuators [38]. The shapes of these three models are depicted as shown in Figure 2. However, during the design process of these models, it is not feasible to decouple the oscillation frequency from dimensions or velocity ratio.
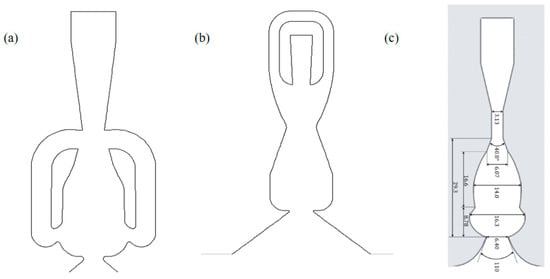
Figure 2.
The shapes of three actuators: (a) double-feedback actuator [21], (b) single-feedback actuator, and (c) feedback-free actuator [38].
In the author’s previous research on the SWJ actuator [22], a combination of numerical simulations and experiments was used to study the internal flow of the SWJ actuator. This research verified that the frequency of the SWJ actuator is proportional to the momentum coefficient or velocity ratio.
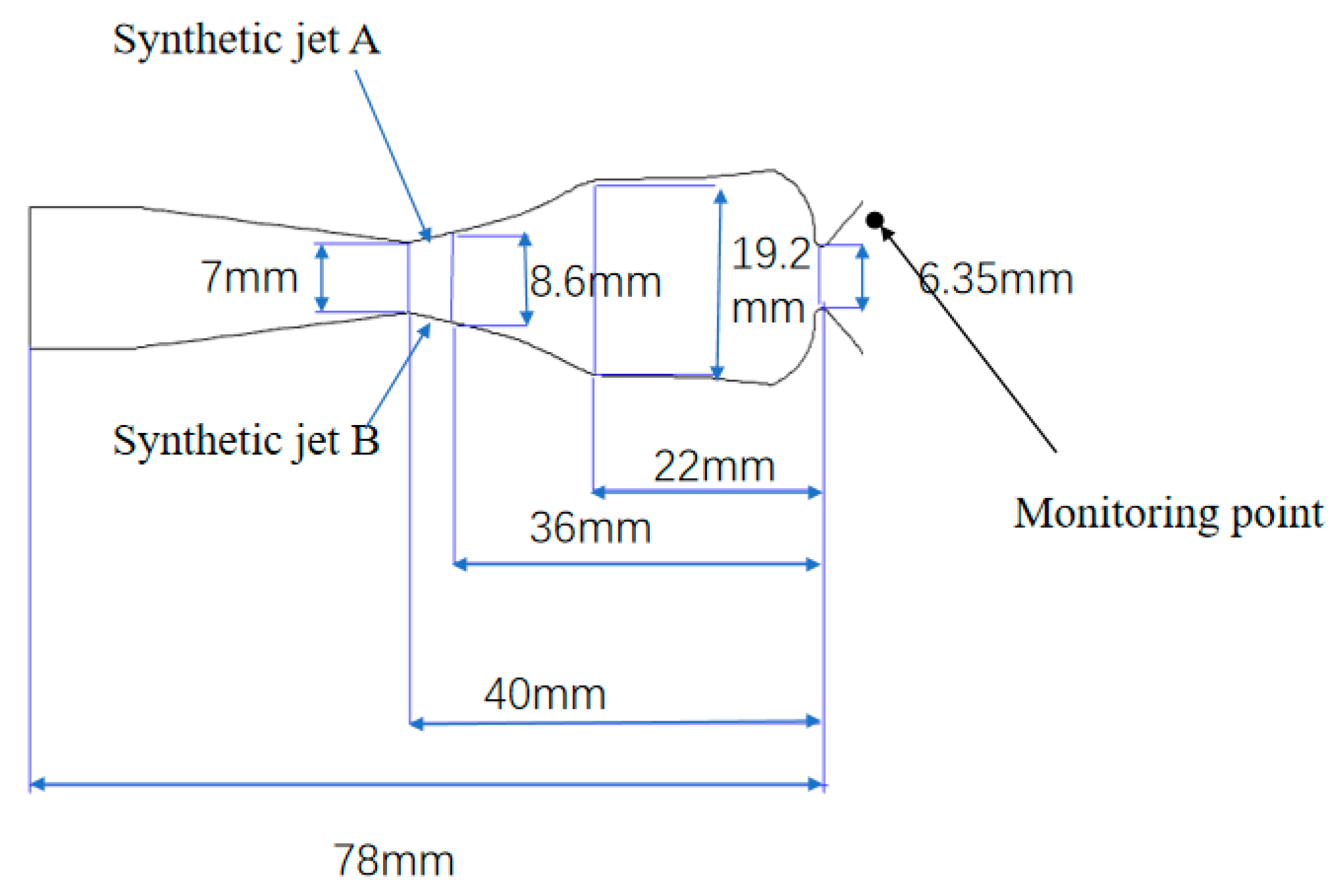
Therefore, in the current study, the design of the SWJ actuator model is innovative in that it replaces the feedback channel with synthetic jets while keeping other geometric dimensions and shapes unchanged. The positions of the two synthetic jets correspond to the locations of the feedback channel inlets in a traditional SWJ actuator, allowing for control of the jet at the inlet to achieve periodic sweeping. The dimensions of the novel SWJ actuator are shown in Figure 3.
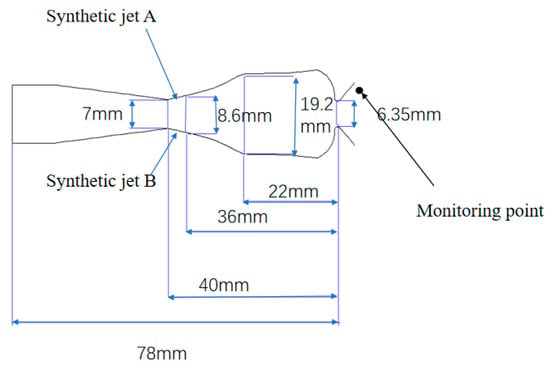
Figure 3.
New Sweeping jet actuator model and dimensions.
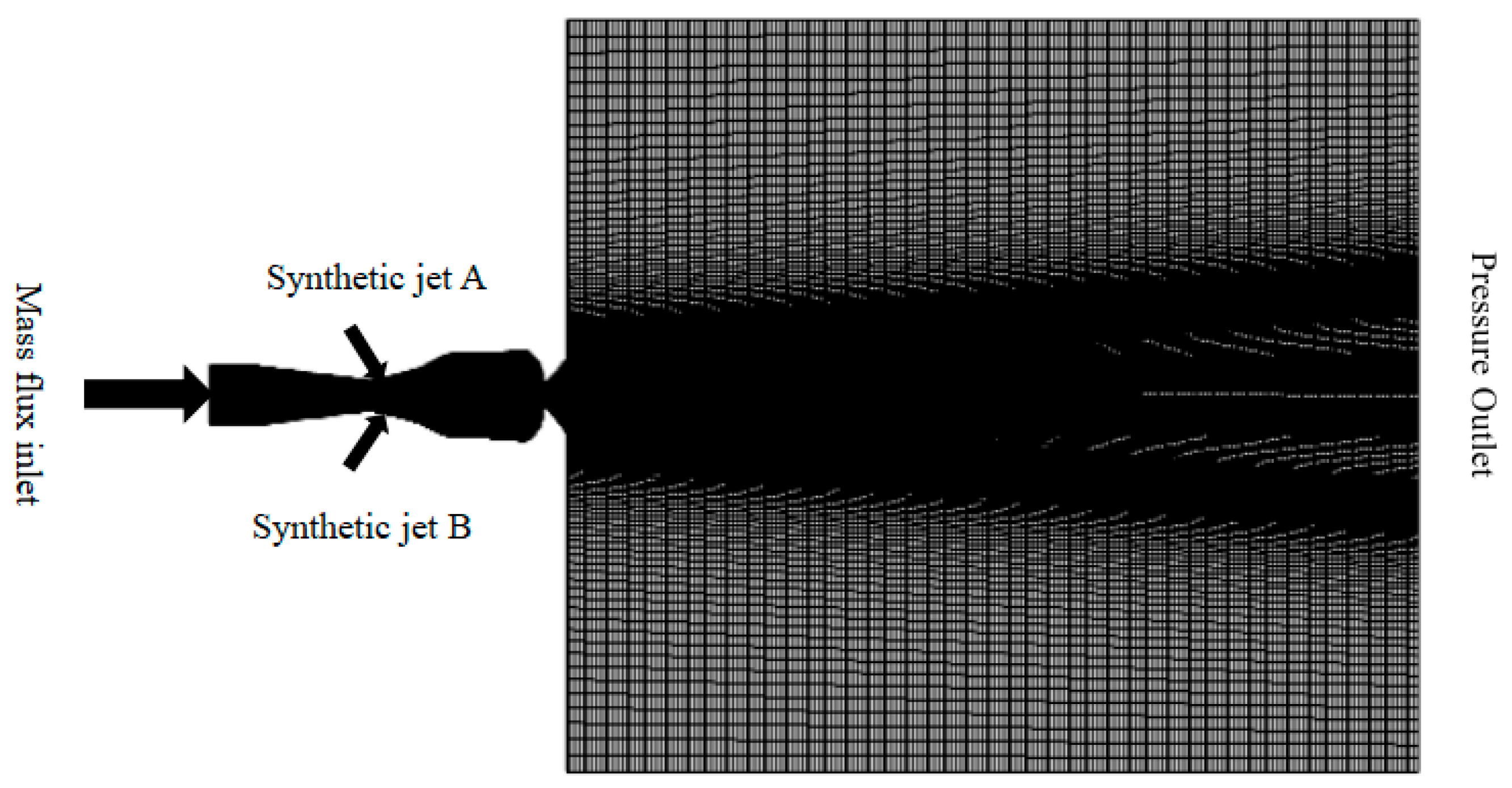
In this study, ICEM CFD was used for mesh generation. As shown in the Figure 4, the grid diagram of the Sweeping jet actuator is shown. The setting of boundary conditions is the same as previous research [38], the position of the synthesized jet is set as the velocity inlet, and the other settings are set as non-slip boundary conditions.
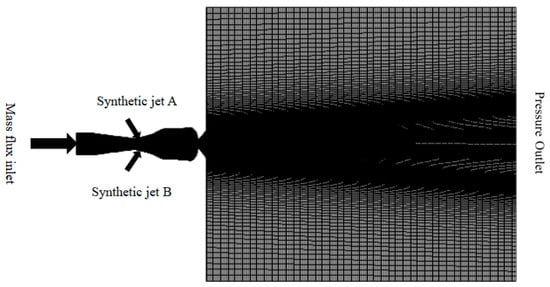
Figure 4.
Grid diagram of the Sweeping jet actuator.
In this study, the SST k-ω turbulence model was chosen, and its equations are shown as follows:
The expression for the model turbulent viscosity is shown in Equations (7)–(9) as follows:
In Equations (1)–(9), represents the Reynolds stress tensor, is the vorticity tensor, is the laminar viscosity, is the turbulent viscosity, and y is the distance to the wall. The model constants are as follows: = 0.31, = 0.09, = 0.41, = 0.85, = 0.5, = 1.0, = 0.856.
The two-dimensional Unsteady Reynolds-Averaged Navier-Stokes (URANS) equations are solved using the commercial computational fluid dynamics (CFD) software, Ansys Fluent v22.0. Air is used as the working fluid. A pressure-based, time-dependent solver with a constant time step of t = 10−5 s is employed.
In selecting the velocity for the synthetic jet, insights from the study [15] revealed that the velocity field within the feedback channel can be represented using sinusoidal or cosine functions. Therefore, a sinusoidal function was chosen for the waveform of the synthetic jet.
The velocity variation between synthetic jets A and B is defined as follows: Equation (11) represents the velocity of synthetic jet A, and Equation (12) represents the velocity of synthetic jet B. In these equations, “” stands for the amplitude, and “b0” corresponds to the mean velocity. “F+” signifies the dimensionless frequency.
The F+ is defined as follows:
where f represents the frequency of the novel Sweeping jet actuator, c is the chord of the Hump airfoil, and U∞ is the freestream velocity. c and U∞ will be provided later in this study.
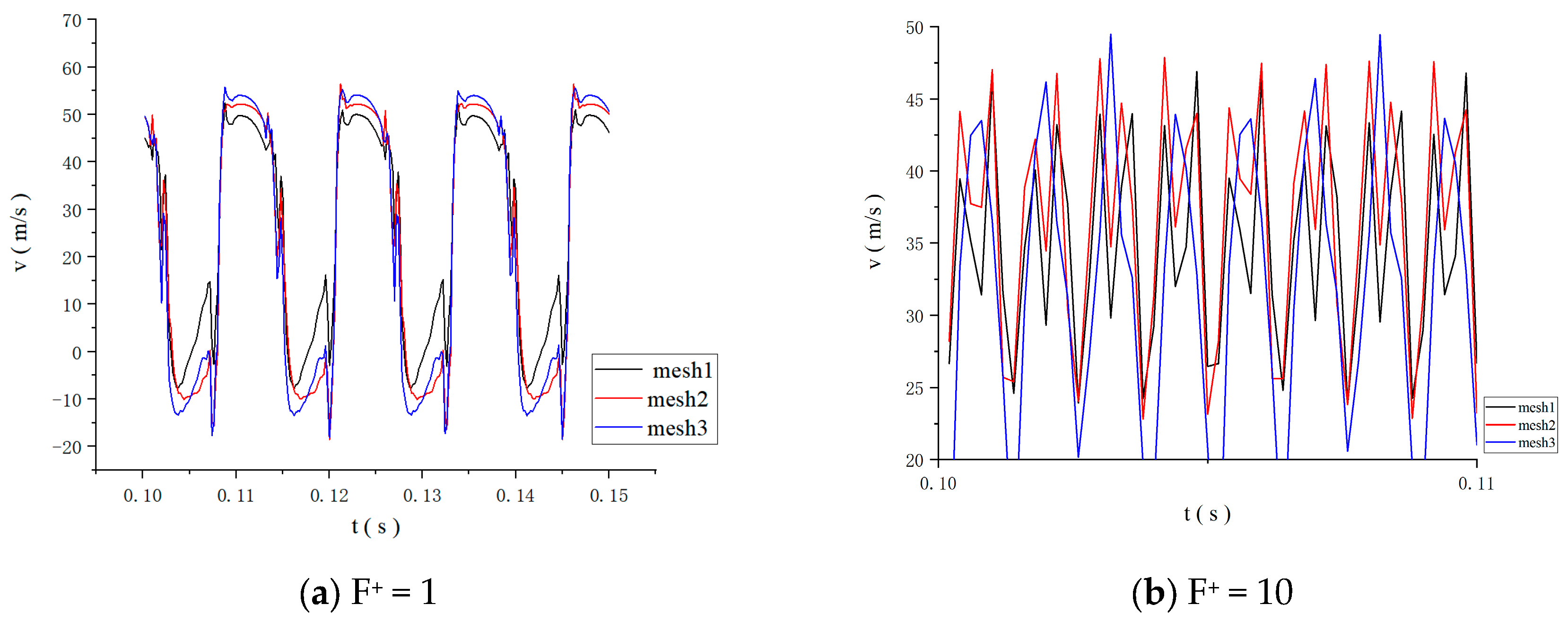
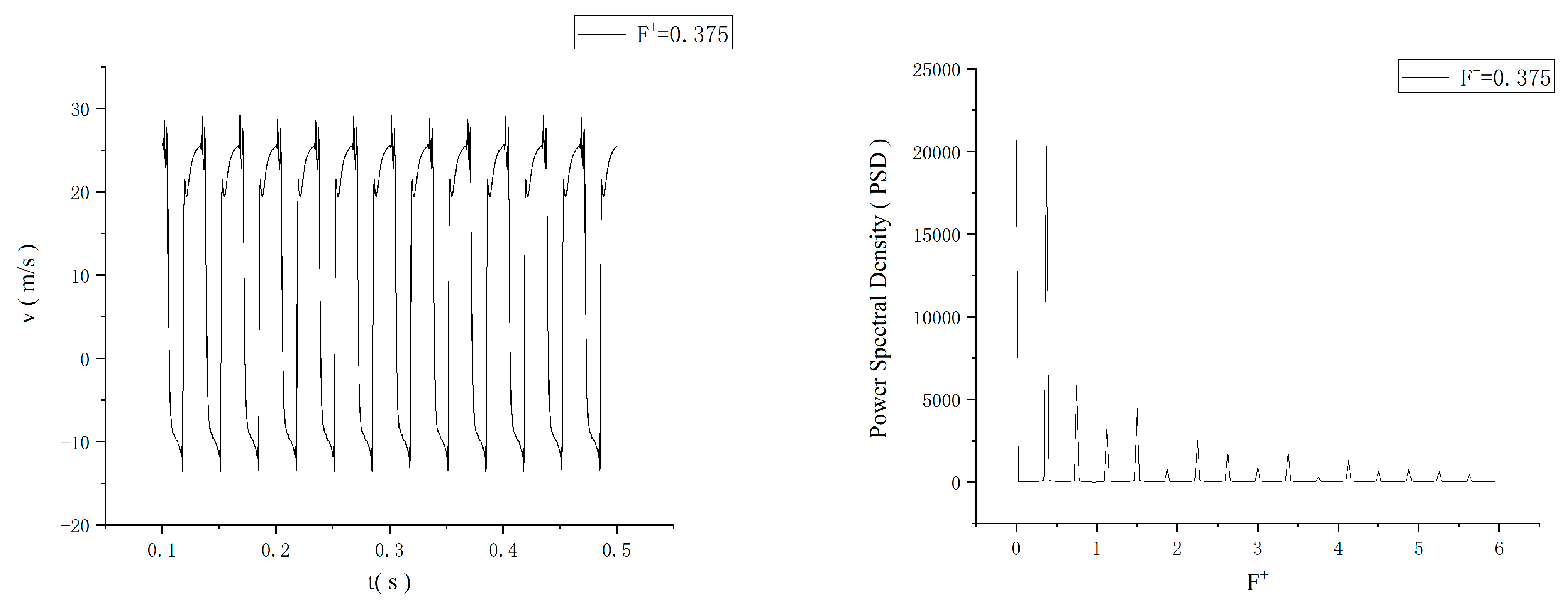
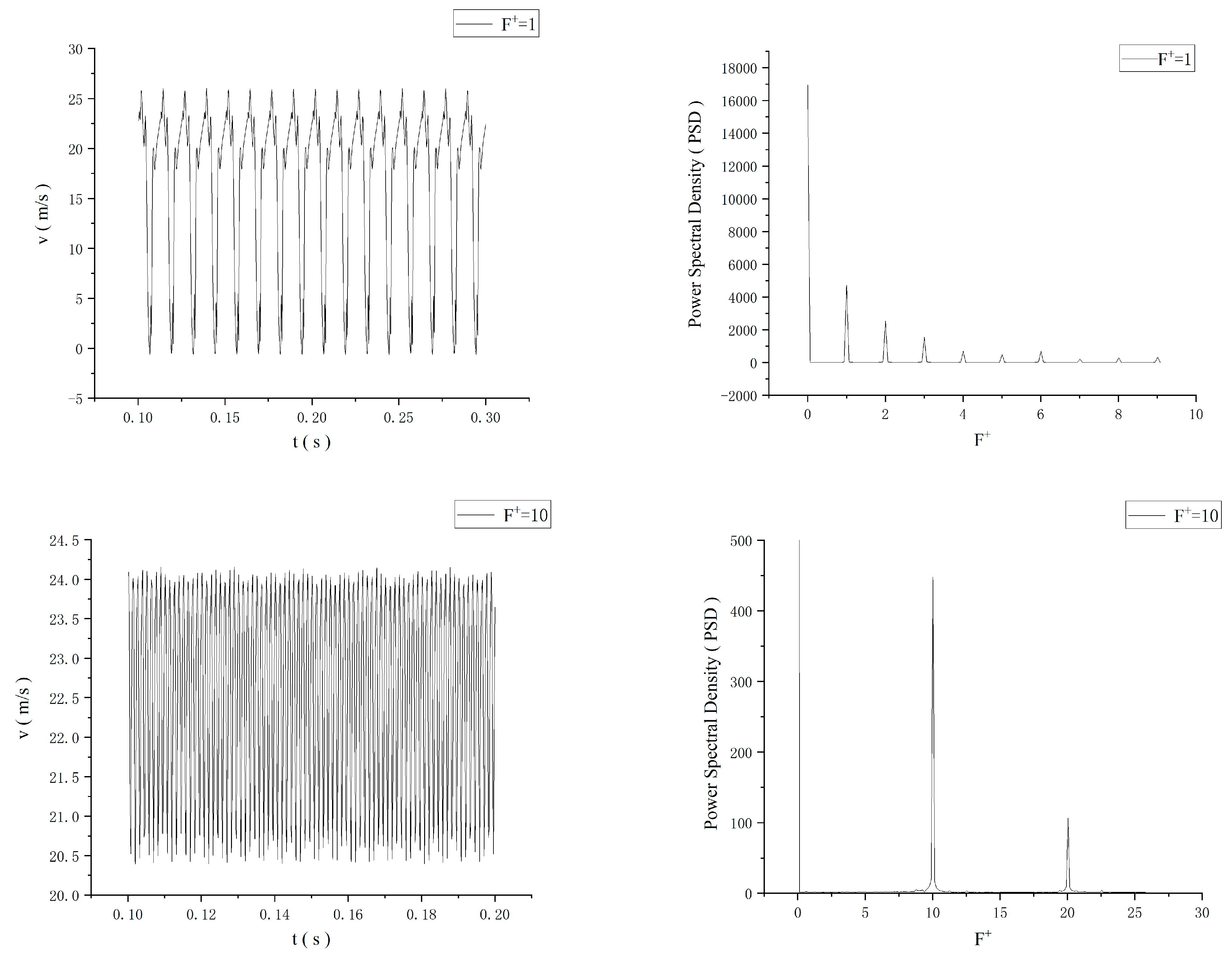
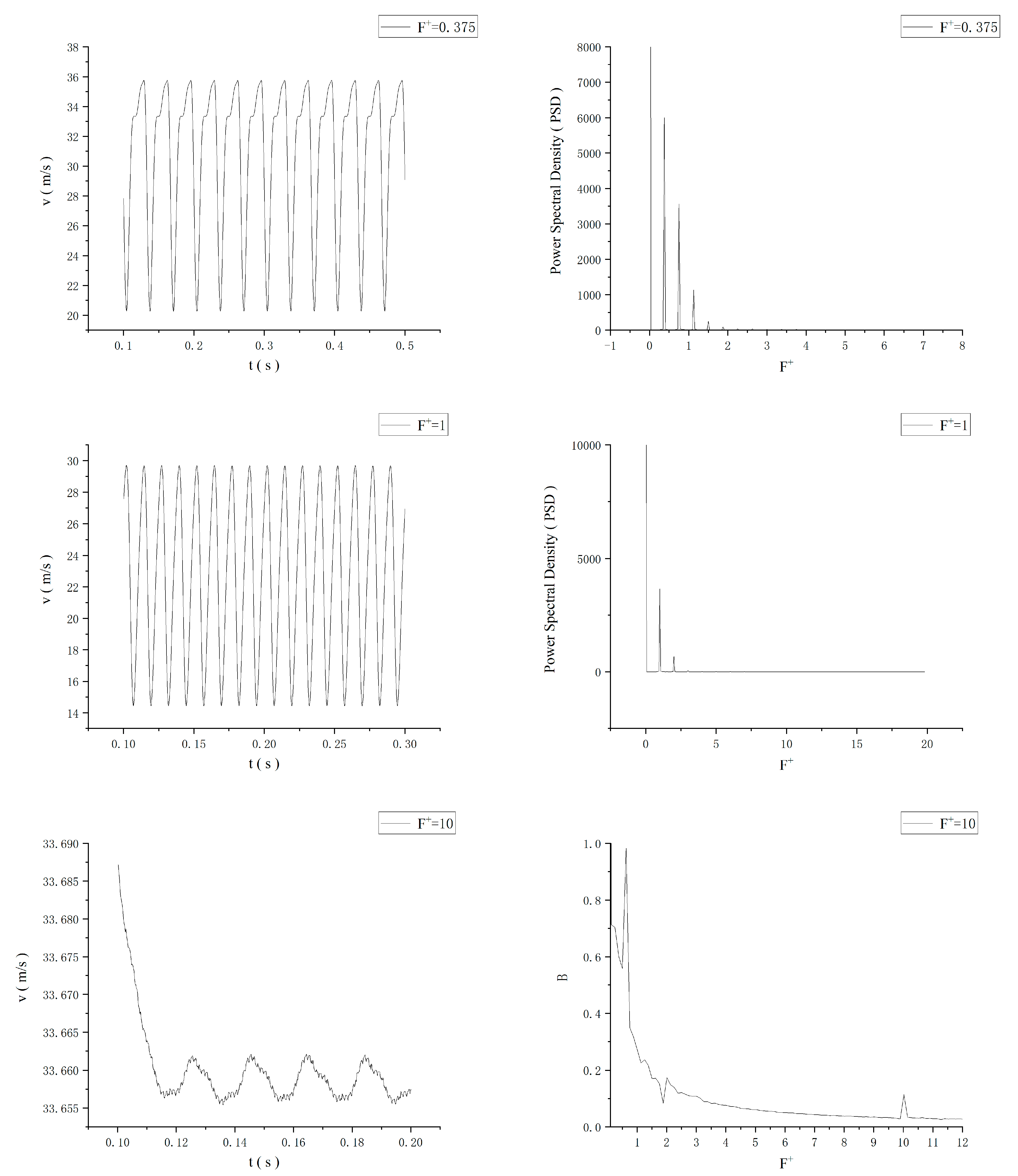
Grid independence verification was conducted, and the grid sizes selected for this study are shown in Table 1. Figure 5 illustrates the variation of internal velocity over time for several grids under control frequencies of 1 and 10. The monitoring point location for the SWJ actuator is shown in Figure 3. It can be observed that increasing the grid size slightly enhances the internal velocity, but the frequencies remain consistent across different grid sizes, confirming grid independence. Therefore, to save computational time while maintaining quality in the numerical simulations presented in this study, mesh2 grid size was chosen.

Table 1.
The number of grids.
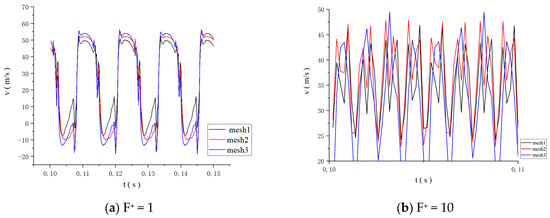
Figure 5.
Velocity variation over time of the SWJ actuator at F+ = 1 and 10.
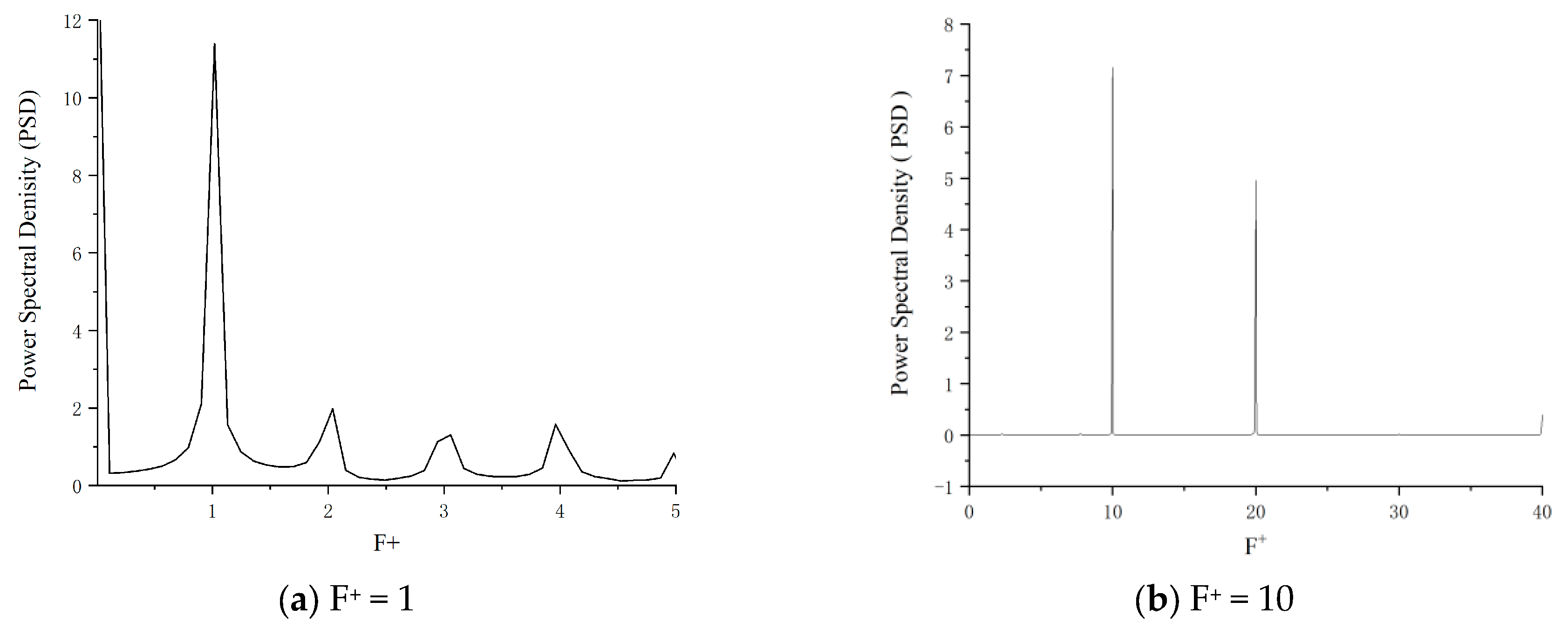
Figure 6 shows the frequency response of mesh2 under F+ = 1 and 10. It can be observed that the dominant frequency aligns with the set frequencies, validating the feasibility of this method. Additionally, the occurrence of harmonics in Figure 6 is consistent with the internal flow fields of other oscillating jet actuators. The occurrence of this phenomenon may be due to the inherent instability of the internal flow, resulting in periodic small disturbances, as depicted in Figure 7. These disturbances are recognized as periodic motions during the Fourier transform process, leading to the appearance of harmonics. However, their impact on the flow field is minimal. In subsequent steps, filtering techniques will be considered to eliminate these disturbances.
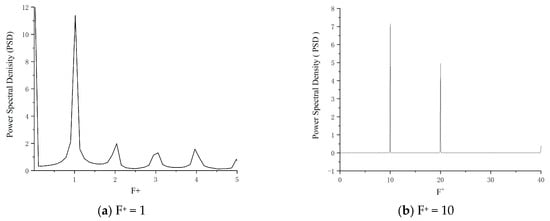
Figure 6.
Fast Fourier Transform analysis of the SWJ actuator at F+ = 1 and 10.
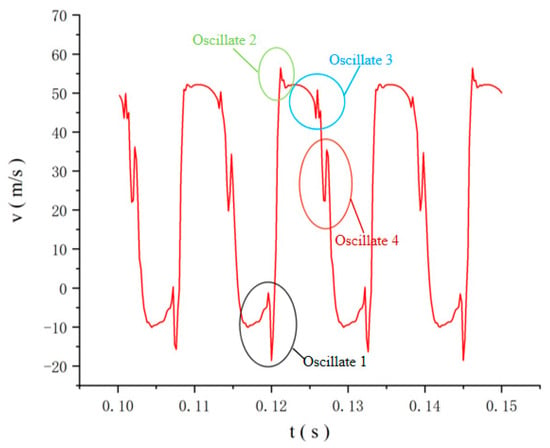
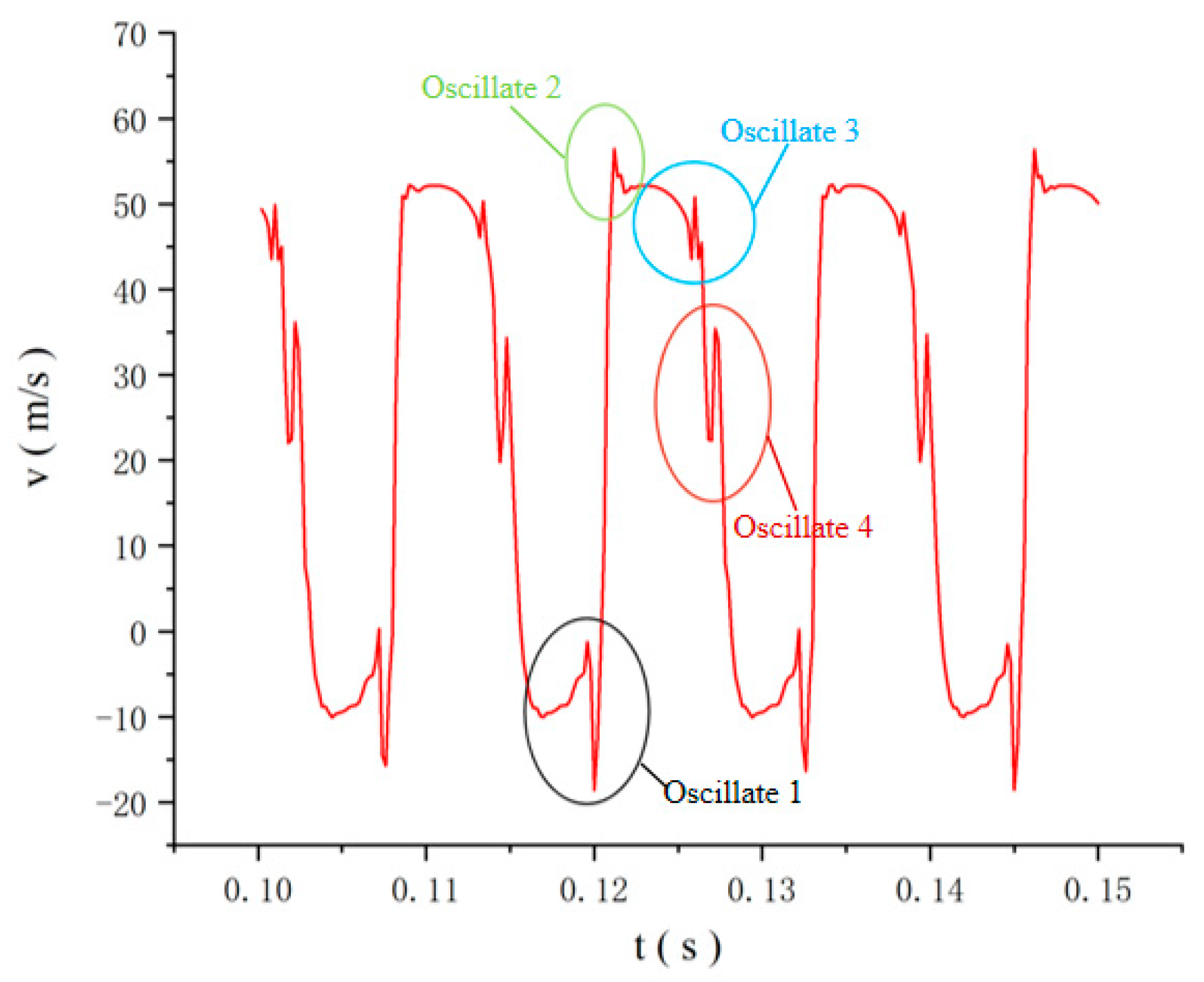
Figure 7.
Disturbance in the velocity flow field.
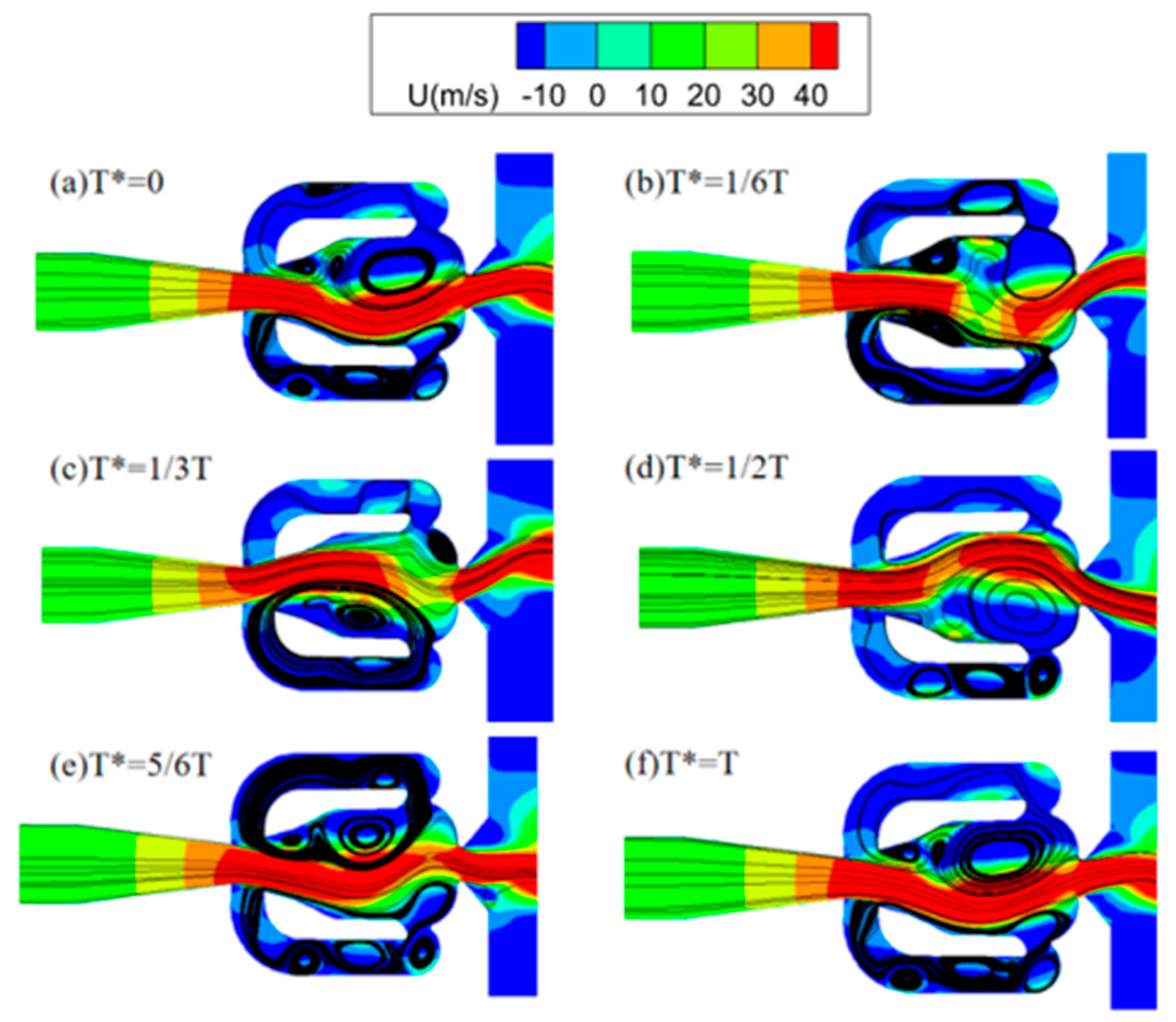
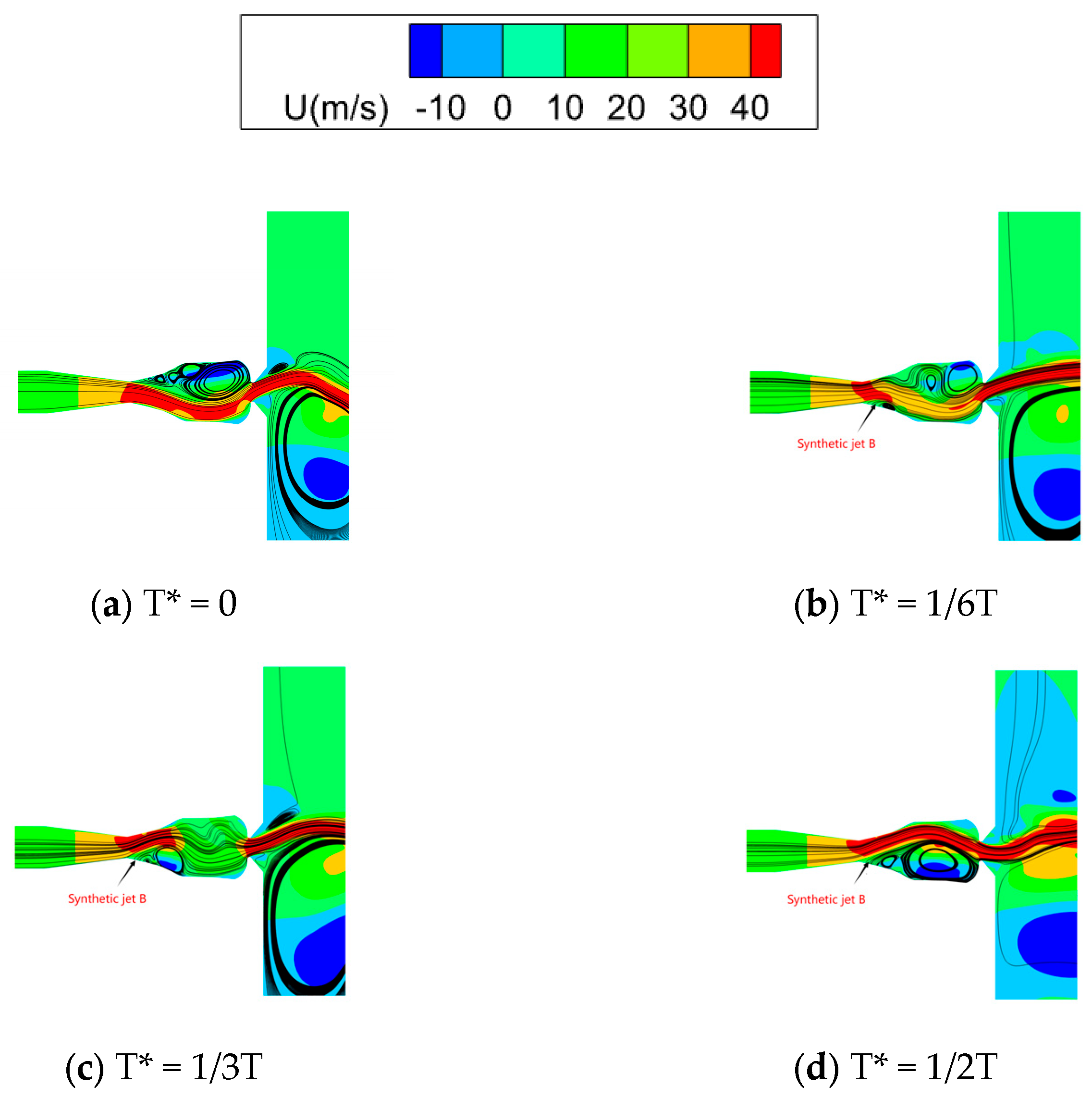
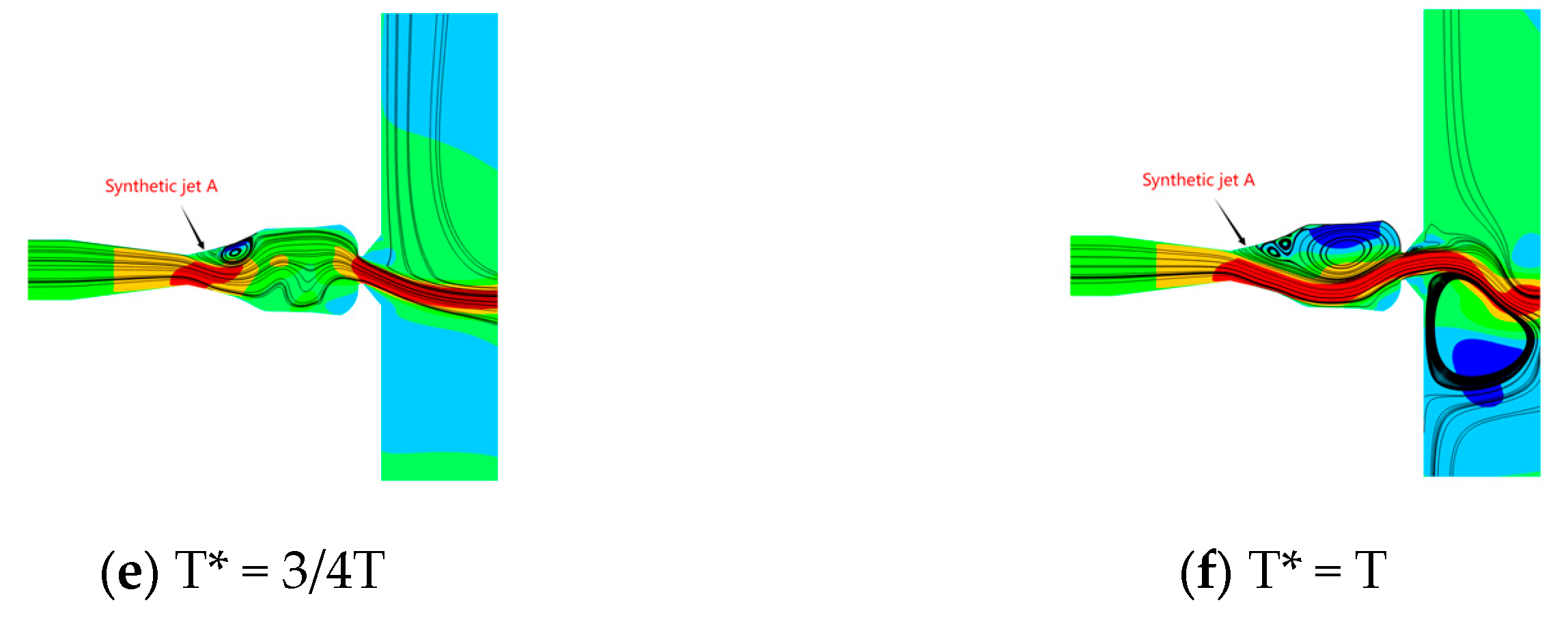
The operational principle of the SWJ actuator is depicted in the provided Figure 8 as follows:
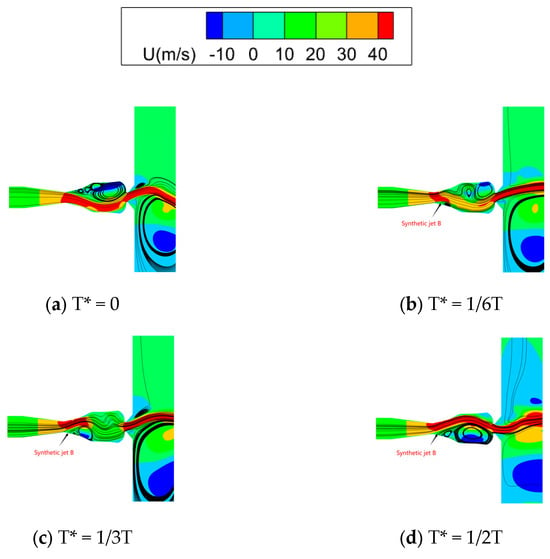
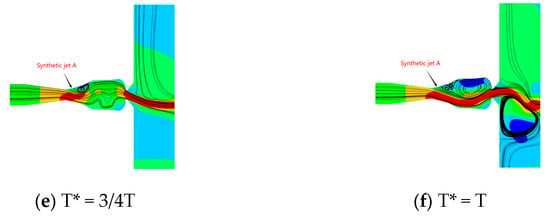
Figure 8.
Periodic flow field of the internal velocity within the SWJ actuator.
At T* = 0, the jet adheres to the lower wall. Due to the interaction between the jet and the wall, the jet’s direction at the exit is upwards. Subsequently, synthetic jet B initiates air expulsion, inducing the creation of separation vortices on the wall at that location. The energy from the synthetic jet promotes the growth of these separation vortices, propelling the jet to move toward the upper wall. By T* = 1/2T, the jet is observed to be fully attached to the upper wall, and its direction at the exit becomes downward. As synthetic jet A comes into play, the jet commences its downward motion towards the wall. By T* = T, a cyclic oscillation is achieved, completing a full period.
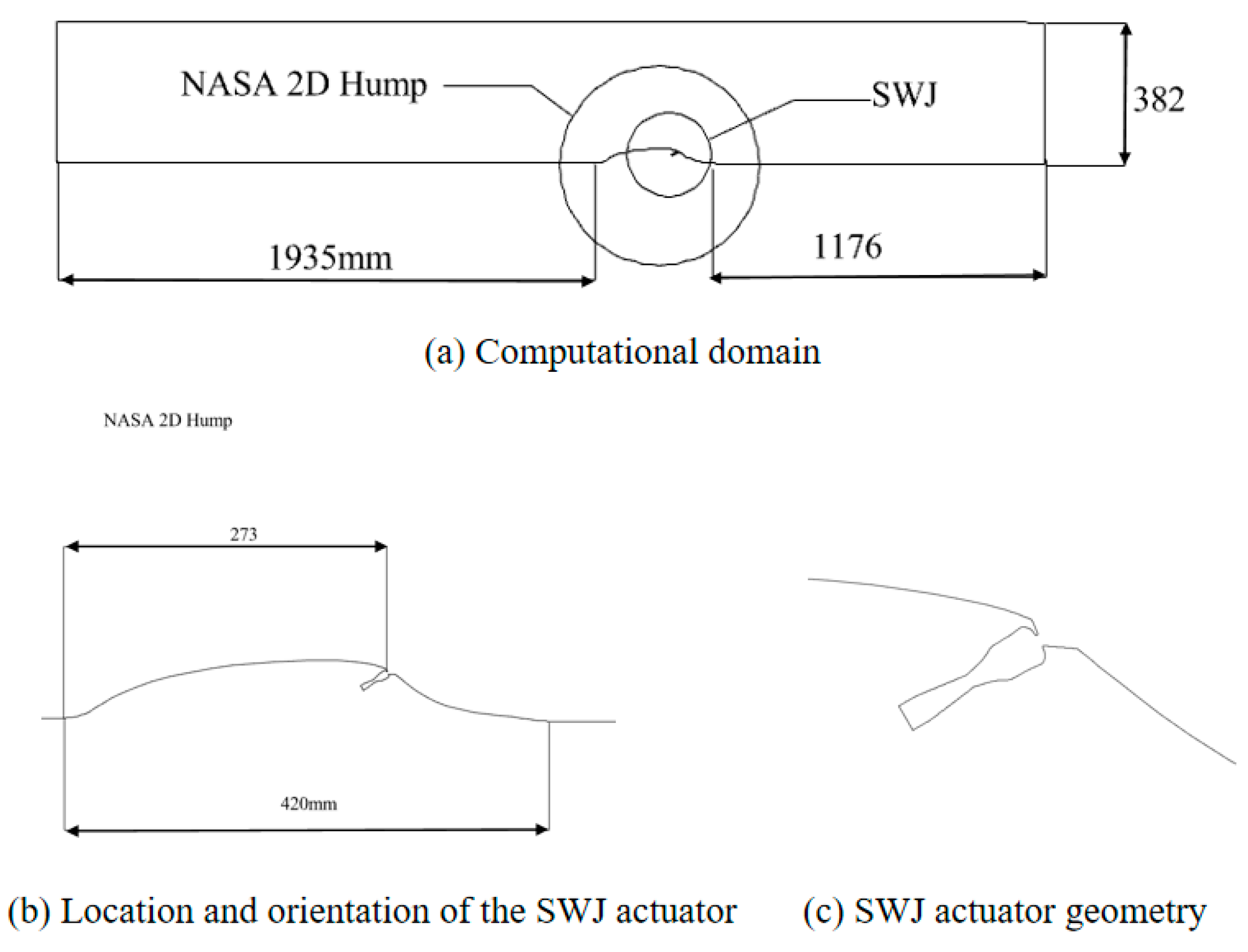
In this study, the location of the SWJ actuator and the hump model are shown in Figure 9. The chord length of the Hump airfoil is 420 mm. The height of the Hump airfoil is 50 mm. The position of the Hump separation point is around 65% of the chord length, so in order to better control the flow separation. The novel SWJ actuator model is positioned at 65% of the chord length and angled at 30° relative to the freestream direction. In this configuration, the size of the SWJ actuator is scaled down to 25%.
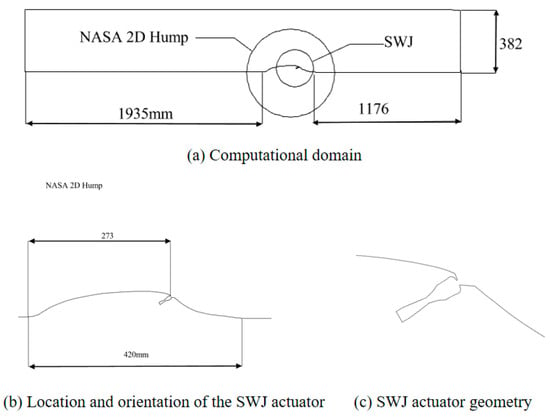
Figure 9.
Sketch of the novel SWJ actuator with 2D hump airfoil [39].
The left boundary of the calculation domain is defined as the velocity inlet and the right boundary is defined as the pressure outlet. Similar to the experiment [40], the inlet velocity is V∞ = 34.6 m/s (M = 0.1), which is horizontal to the right. D. Borgmann et al. conducted the experiment in a subsonic wind tunnel on a wall-mounted hump at chord Reynolds numbers of 0.68 × 106 < Re < 2.02 × 106 (Ma < 0.2). They only studied the efficiency of traditional sweeping jet actuators in a spanwise direction compared to fixed-length jets. The boundary conditions and numerical simulation methods for the oscillating jet device are consistent with the calculations mentioned above.
To investigate the influence of frequency and velocity ratio on flow control using the SWJ actuator, this paper focuses on studying F+ = 0.375, 1, and 10. Velocity ratios (VR) of 1.1, 1.8, 2.3, and 3.1 were chosen.
The VR is defined as follows:
where Ujet refers to the average velocity at the outlet of the SWJ actuator, while U∞ denotes the freestream velocity.
The momentum coefficient is another useful parameter that can be defined as follows:
In Equation (14), the reference area (Aref) is calculated by multiplying the chord length with the active span, which is determined by the jet spacing (∆z) and the number of active actuators (n). The jet velocity is derived based on the applied mass flow, assuming freestream conditions at the actuator nozzle exit (). With this assumption, Equation (14) transforms into the following:
In this paper, c = 420 mm and ∆z = 1; then, Equation (15) becomes the following:
Observing Equation (16), it is evident that the momentum coefficient is derived from VR. For simplicity, VR was directly used as the subject of investigation in this study.
3. Results
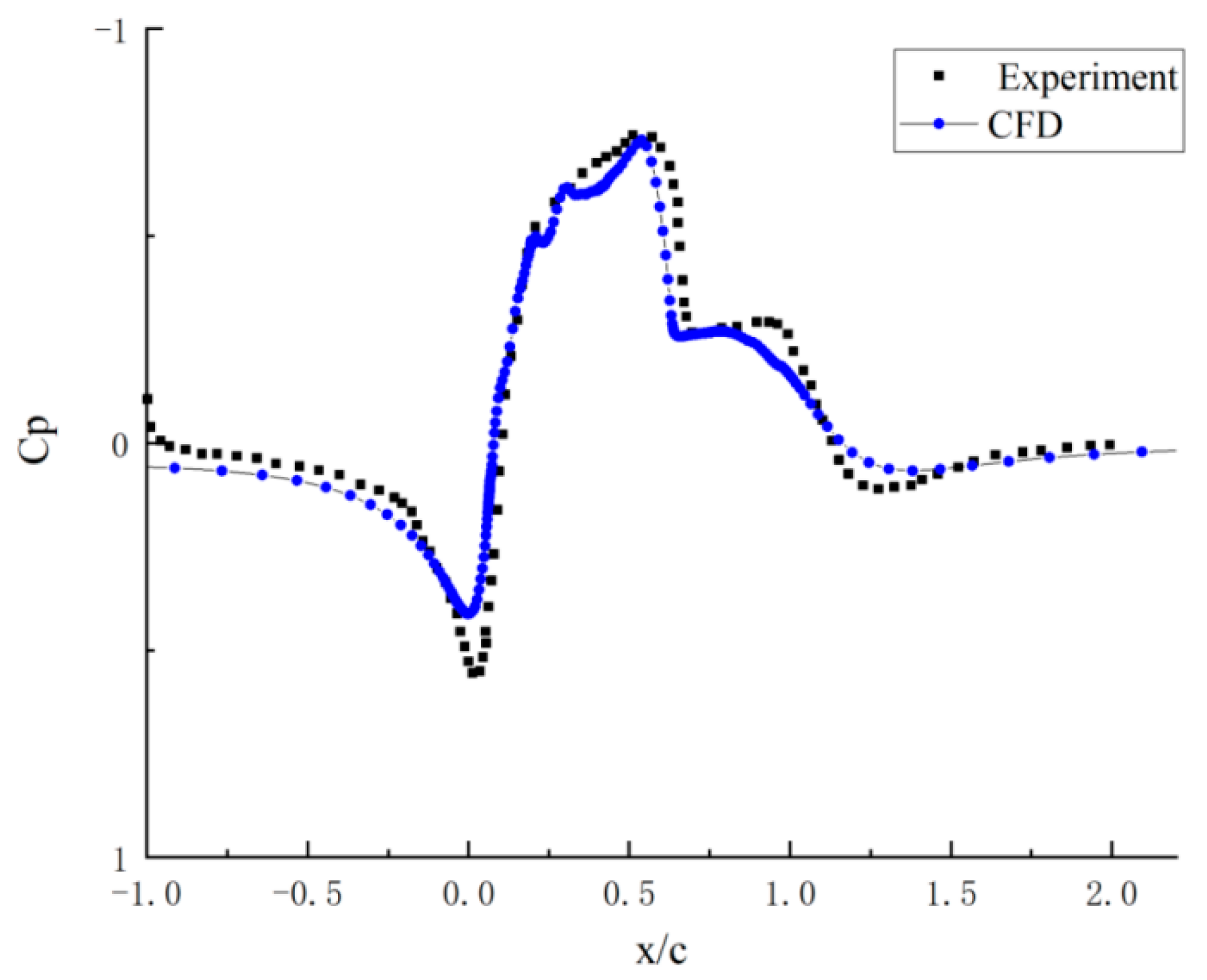
The Cp of the Hump airfoil is shown in Figure 10. The numerical calculation results clearly fit the experimental data well, which proves the feasibility of the numerical simulation method and grid.
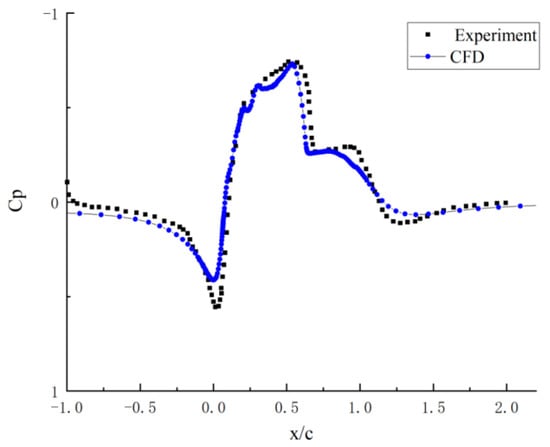
Figure 10.
The time-averaged coefficient of pressure (Cp) over the Hump airfoil in the no-flow-control scenario is compared with experimental data [40].
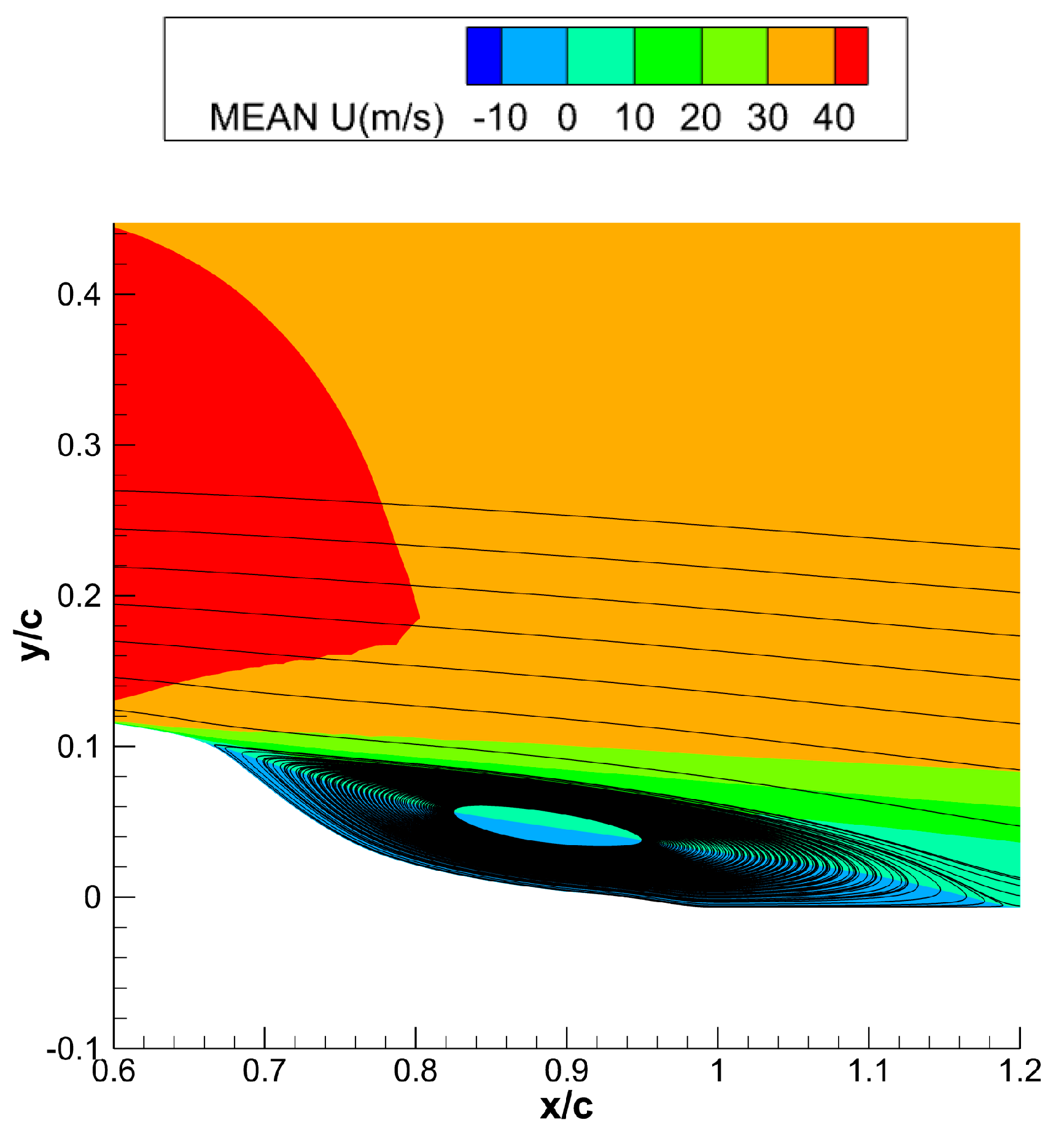
As shown in Figure 11, the average flow field of the streamwise velocity is depicted. In the streamwise velocity field, it can be observed that under uncontrolled conditions, there is significant separation of the Hump airfoil. The separation point at x/c = 0.65. The reattachment point at x/c = 1.2.
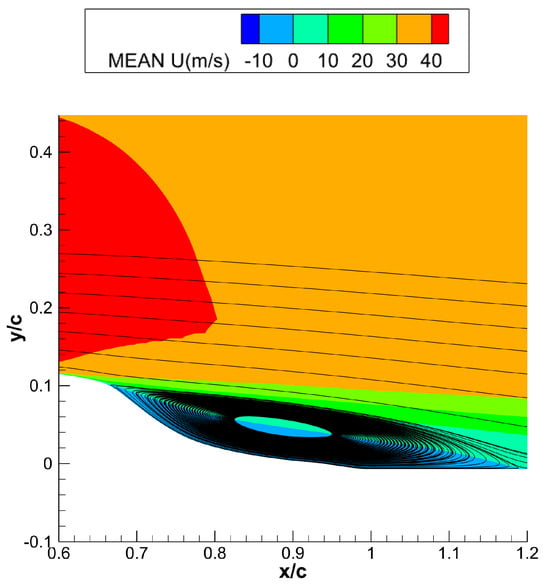
Figure 11.
Size of the separation vortex of the Hump airfoil.
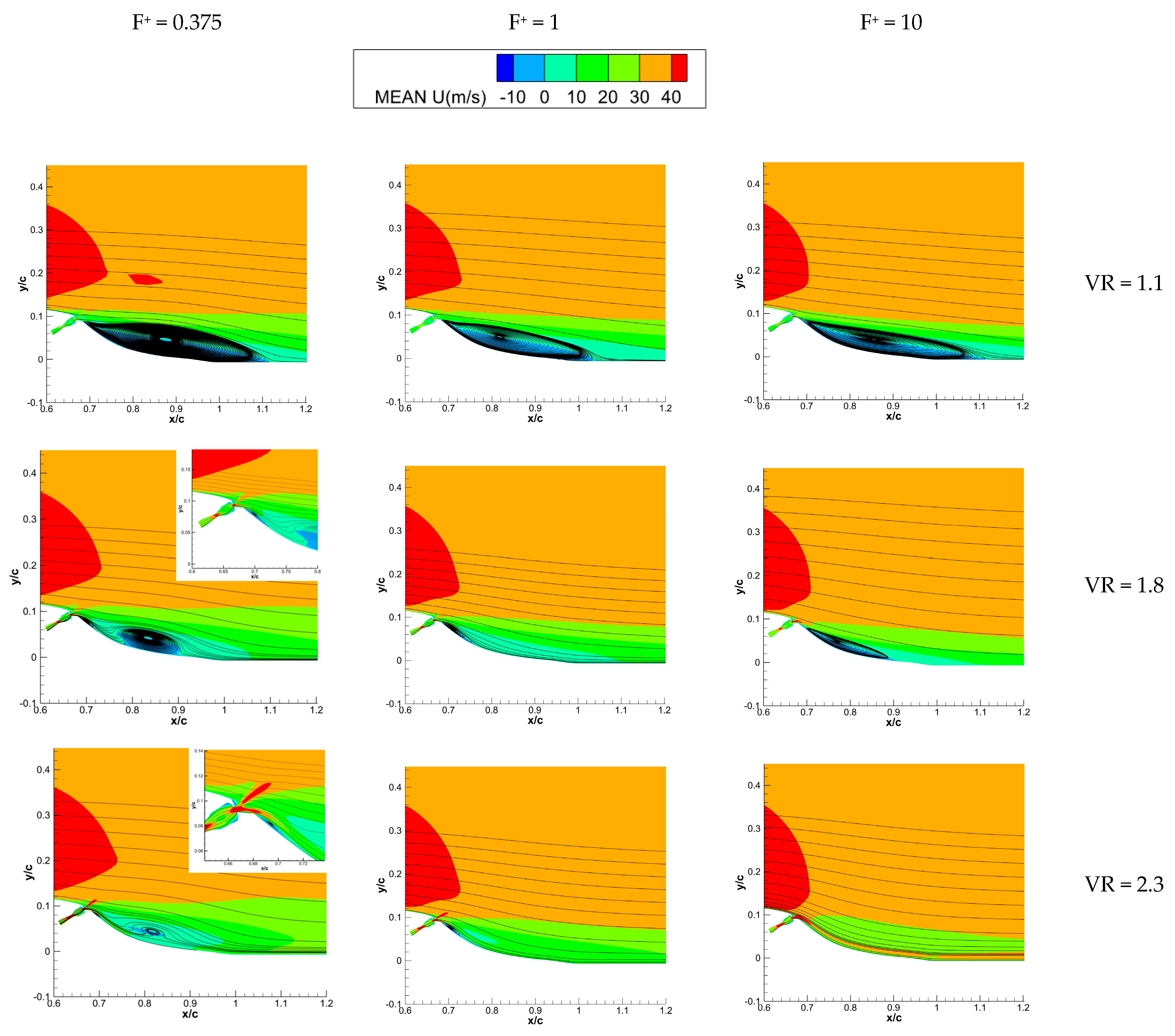
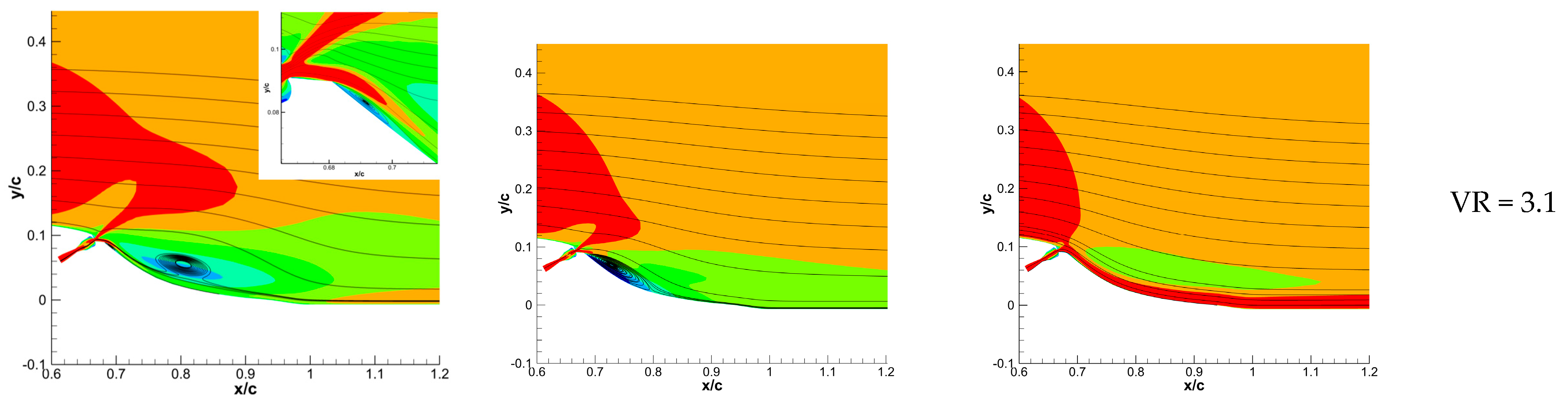
Figure 12 illustrates the average streamwise velocity field of the HUMP airfoil under SWJ actuator control. By comparing the average velocity fields of the HUMP airfoil under SWJ actuator control at different F+, it is observed that both F+ and VR have a certain impact on the size of the separation vortices. The separation point positions under SWJ actuator control are shown in Table 2. Due to the presence of two separation vortices on the surface of the Hump airfoil at F+ = 0.375, two separation points and reattachment points have been added to the table. The specific mechanism of generation will be further described below.
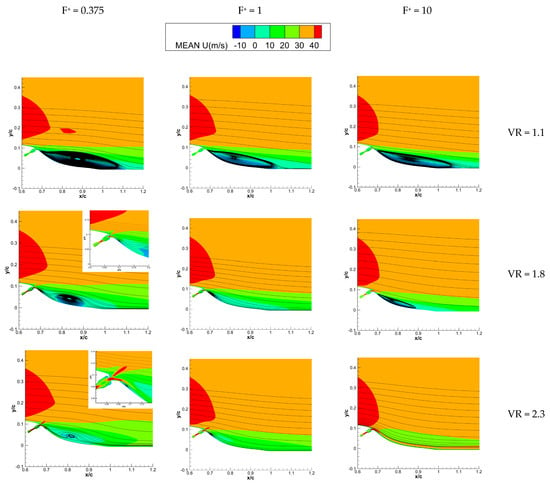
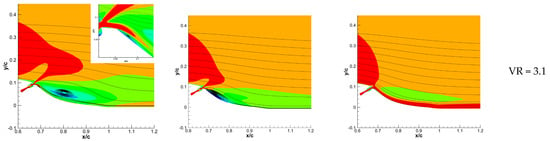
Figure 12.
Under F+ = 0.375, 1, and 10 control, the HUMP airfoil’s average flow field at various VR.
Table 2.
The separation point positions under SWJ actuator control.
At VR = 1.1, F+ has a relatively minor impact on the flow separation of the HUMP airfoil. Although at F+ = 1, the reattachment point is slightly closer to the upstream region, this effect is not very pronounced. As VR increases, the influence of frequency on the flow separation of the HUMP airfoil becomes significantly different. At VR = 1.8, it is evident that at F+ = 1, the flow separation control is most effective. It can shift the reattachment point from x/c = 1.2 to x/c = 0.76, an improvement of 0.14 compared to F+ = 10. This demonstrates that frequency has a certain impact on flow control, and at this momentum coefficient, F+ = 1 achieves the optimal flow separation control. However, with the continued increase in VR, F+ = 10 becomes the best control frequency, effectively suppressing flow separation on the HUMP airfoil, with the separation vortex essentially disappearing.
At VR = 3.1, for F+ = 0.375 and 1, the separation vortex size increases with the increasing VR, indicating that F+ may have an inhibitory effect on flow control during the operation of the SWJ actuator. Simultaneously, the control effects demonstrated by F+ = 1 and 10 at different momentum ratios suggest that selecting the appropriate frequency at different VR can optimize the control effectiveness.
In addition, at F+ = 0.375, a distinct alteration in the separation vortex shape is apparent. The separation vortex at the separation point is smaller in size, and its vortex center is located farther away from the separation point. Moreover, at this frequency, with an increase in velocity ratio, a notable phenomenon can be observed: due to the smaller height near the separation point, the separation vortex splits into two vortices with increasing momentum. One vortex remains at the separation point with a smaller size, while the other is positioned above the airfoil.
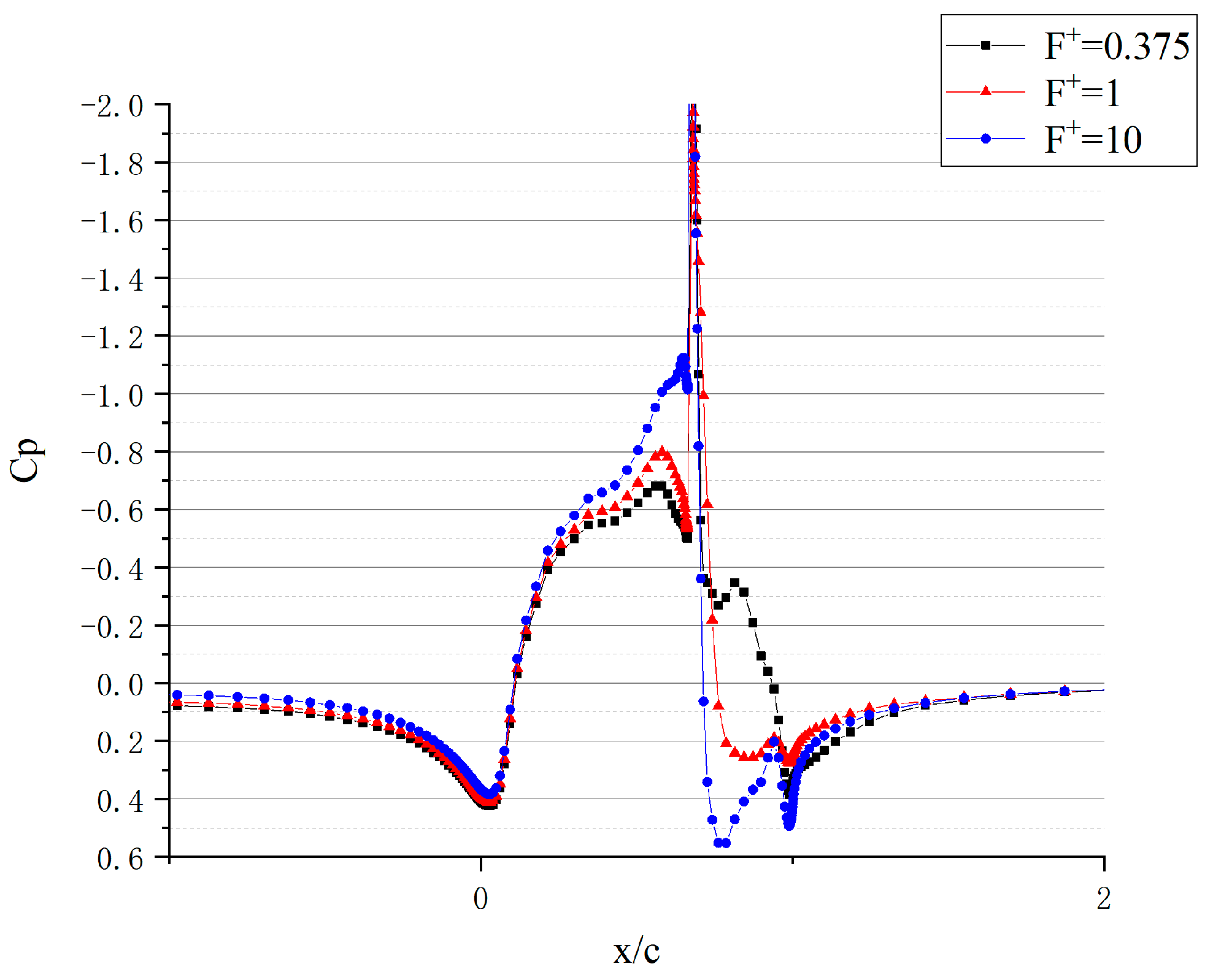
Figure 13 depicts the comparison of surface pressure coefficients under different F+ controls at VR = 3.1, showing consistent results with the average streamwise velocity field. The optimal control effect is observed at F+ = 10.
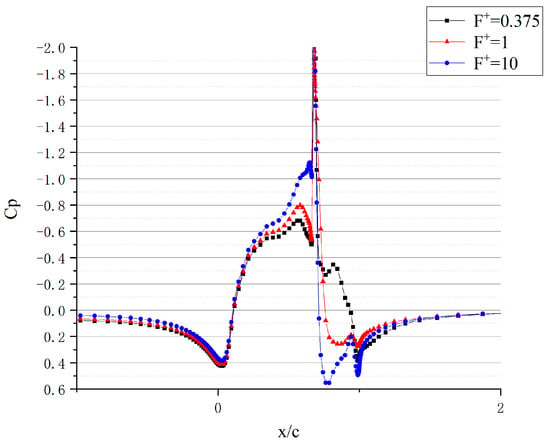
Figure 13.
Under F+ =0.375, 1 and 10 control, the time-averaged Cp at VR = 3.1.
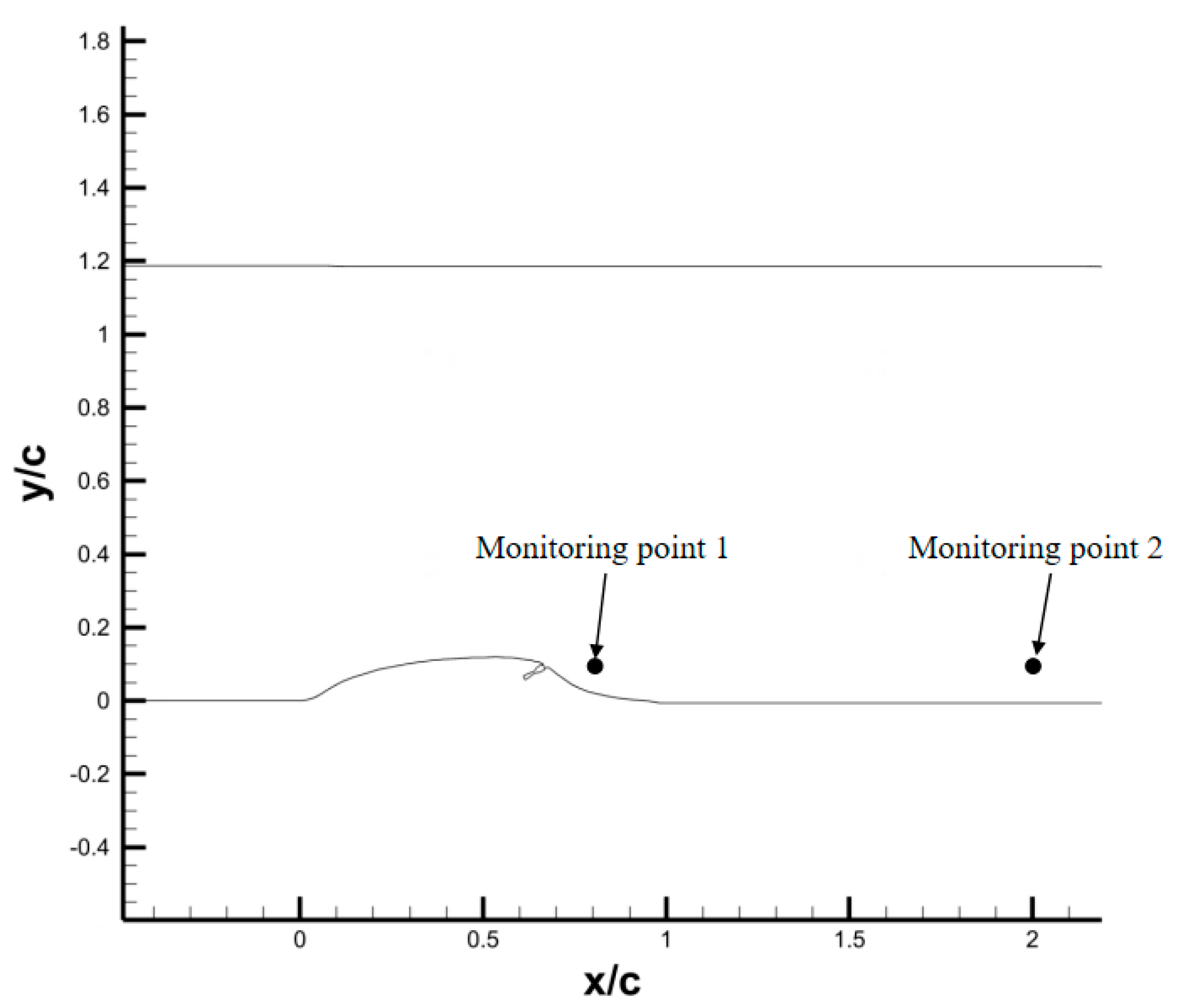
In response to the phenomena observed in Figure 12, this paper conducts a detailed investigation into the flow field mechanisms of the SWJ actuator on the HUMP airfoil at F+ = 0.375, 1, and 10. Initially, a study on the control of the flow field is conducted for SWJ actuators at different frequencies. Two monitoring points are established in the flow field:one (x/c = 0.8, y/c = 0.1) near the SWJ actuator and the other (x/c = 2, y/c = 0.1) at a distance of one chord length from the HUMP airfoil. The locations of these monitoring points are illustrated in Figure 14.
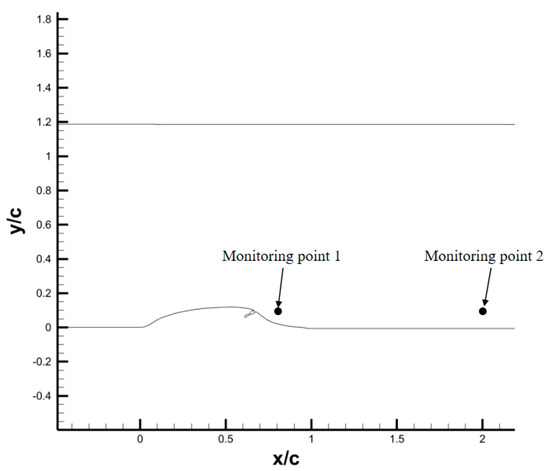
Figure 14.
The location of monitoring points.
As shown in Figure 15, the influence of SWJ actuators at various frequencies on the flow field at monitoring point 1 is illustrated. In this study, the velocity variation overtime at this point and the corresponding Fast Fourier Transform are investigated. It can be observed that the SWJ actuator effectively aligns the frequency of the flow field near the actuator with the frequency of the SWJ actuator itself.
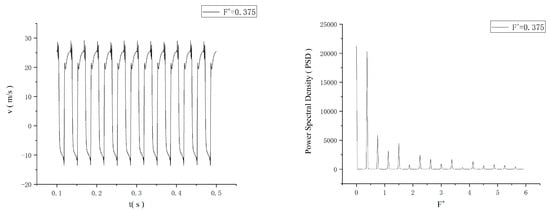
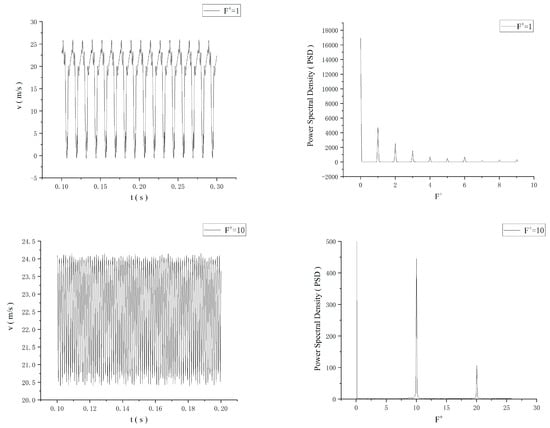
Figure 15.
The variation of velocity over time at monitoring point 1 and the corresponding Fast Fourier Transform at VR = 1.8.
The impact of SWJ actuators at various frequencies on the flow field at monitoring point 2 is illustrated in Figure 16. It can be observed that at a distance from the SWJ actuator, F+ = 0.375 and 1 continue to ensure consistency between the frequency of the entire flow field and the oscillation frequency. However, at F+ = 10, the periodicity at this point diminishes.
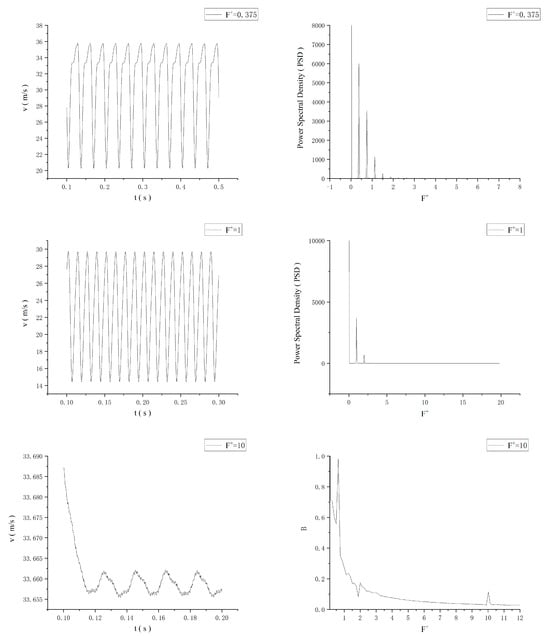
Figure 16.
The variation of velocity over time at monitoring point 2 and the corresponding Fast Fourier Transform at VR = 1.8.
By comparing the frequency information at two monitoring points, it was observed that at VR = 1.8 and F+ = 10, the impact on the flow field far from the SWJ actuator was minimal. However, at F+ = 0.375 or F+ = 1, the flow field frequency remained consistent with the oscillation frequency, ensuring that the frequency of the separated vortices matched the SWJ actuator frequency. This likely explains why F+ = 1 achieved better control effectiveness when VR ≤ 1.8. The reasons for the less effective control at F+ = 0.375 require further investigation of the flow field.
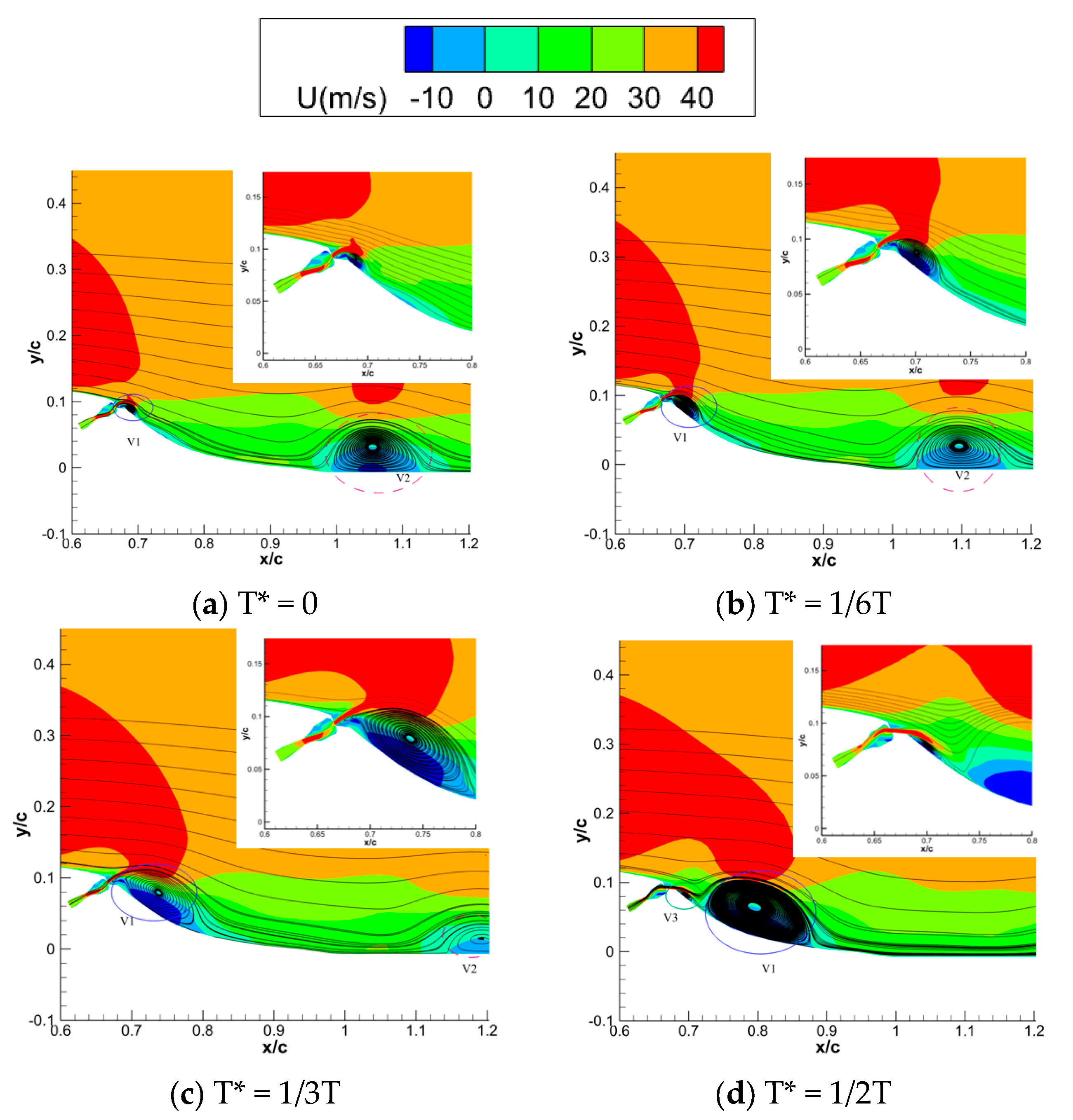
In addition, this paper investigates the periodic flow field under the control of the oscillating jet device and explores the working mechanism of the oscillating jet. As illustrated in Figure 17, the periodic flow field for F+ = 1 is shown.
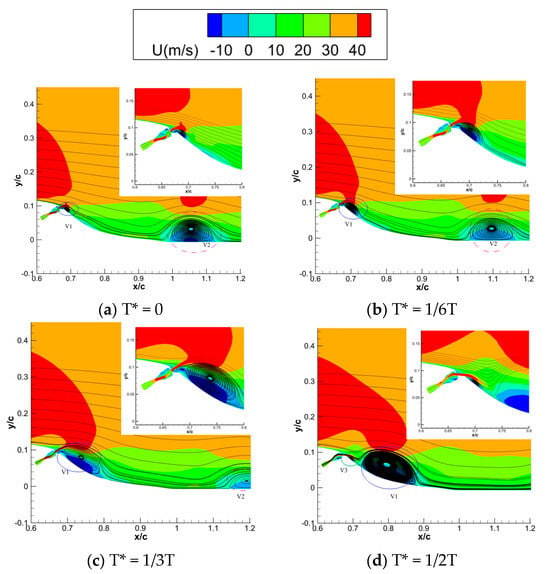
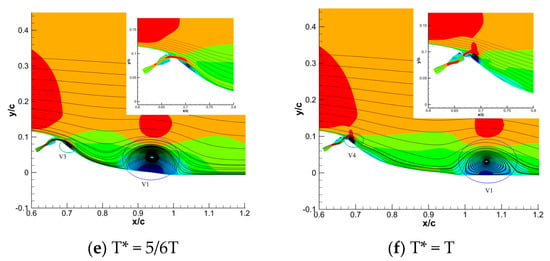
Figure 17.
Periodic flow field of the HUMP airfoil under F+ = 1 and VR = 1.8 control.
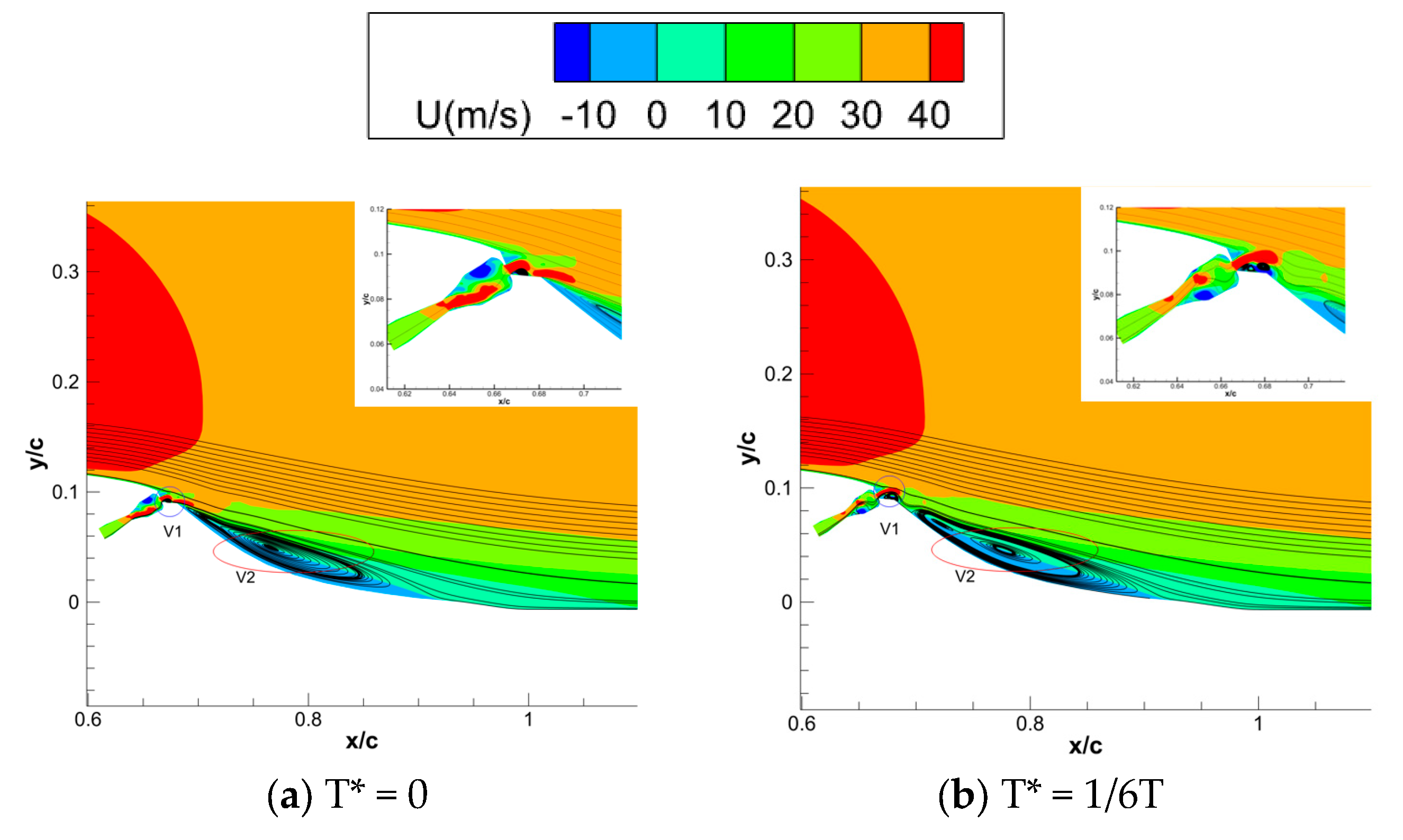
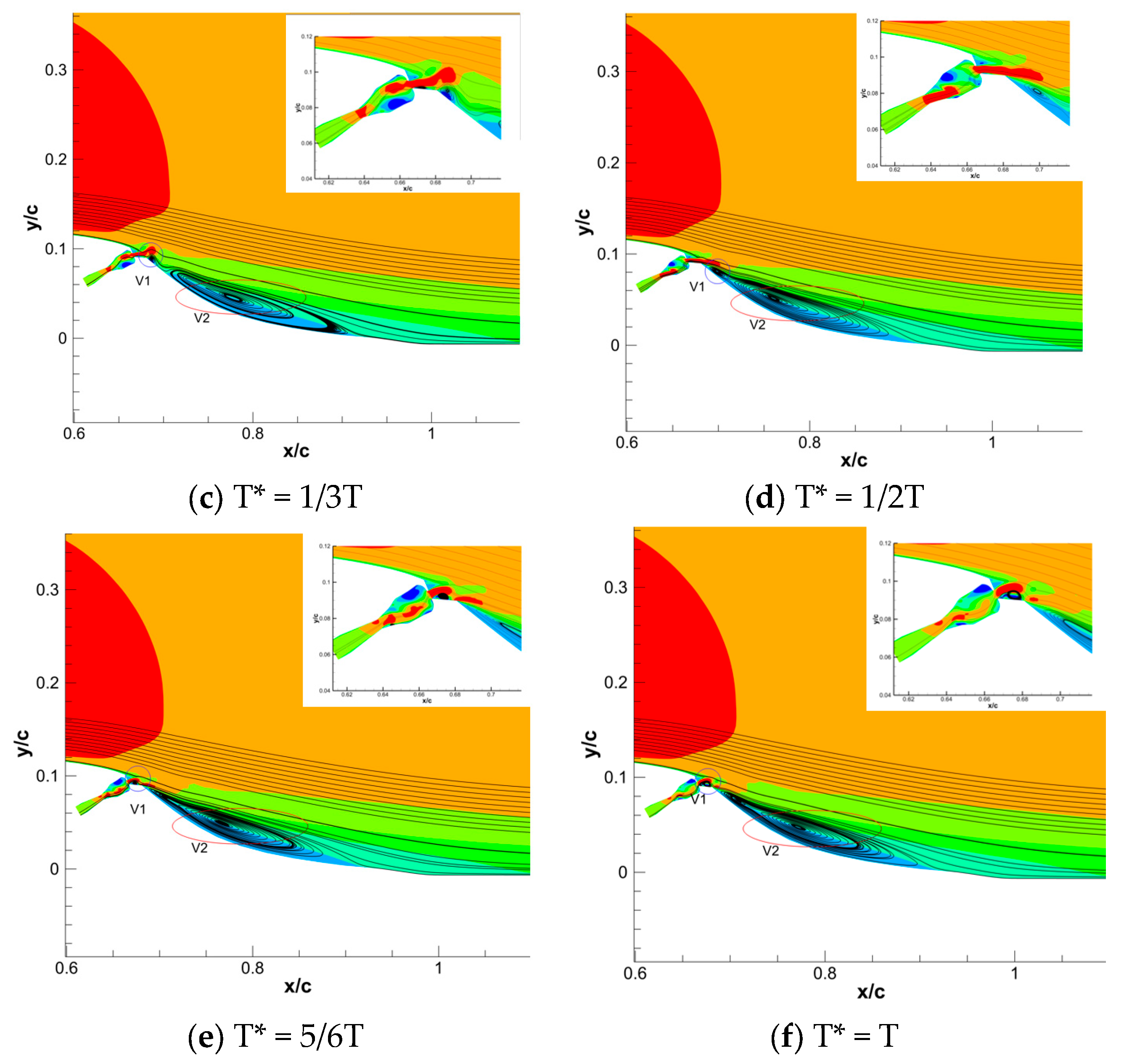
At time T* = 0, two separated vortices, V1 and V2, appear on the surface of the airfoil. The smaller-sized vortex, V1, is generated due to the interaction between the oscillating jet attached to the lower surface of the airfoil at the exit location and the incoming flow from the external environment. From T* = 0 to T* = 1/6T, the size of V1 gradually increases, as depicted in the upper right corner. V1 redirects the incoming flow from the external environment towards the surface of the airfoil, leading to a gradual reduction in the size of V2. By T* = 1/3T, the size of V2 has mostly disappeared.
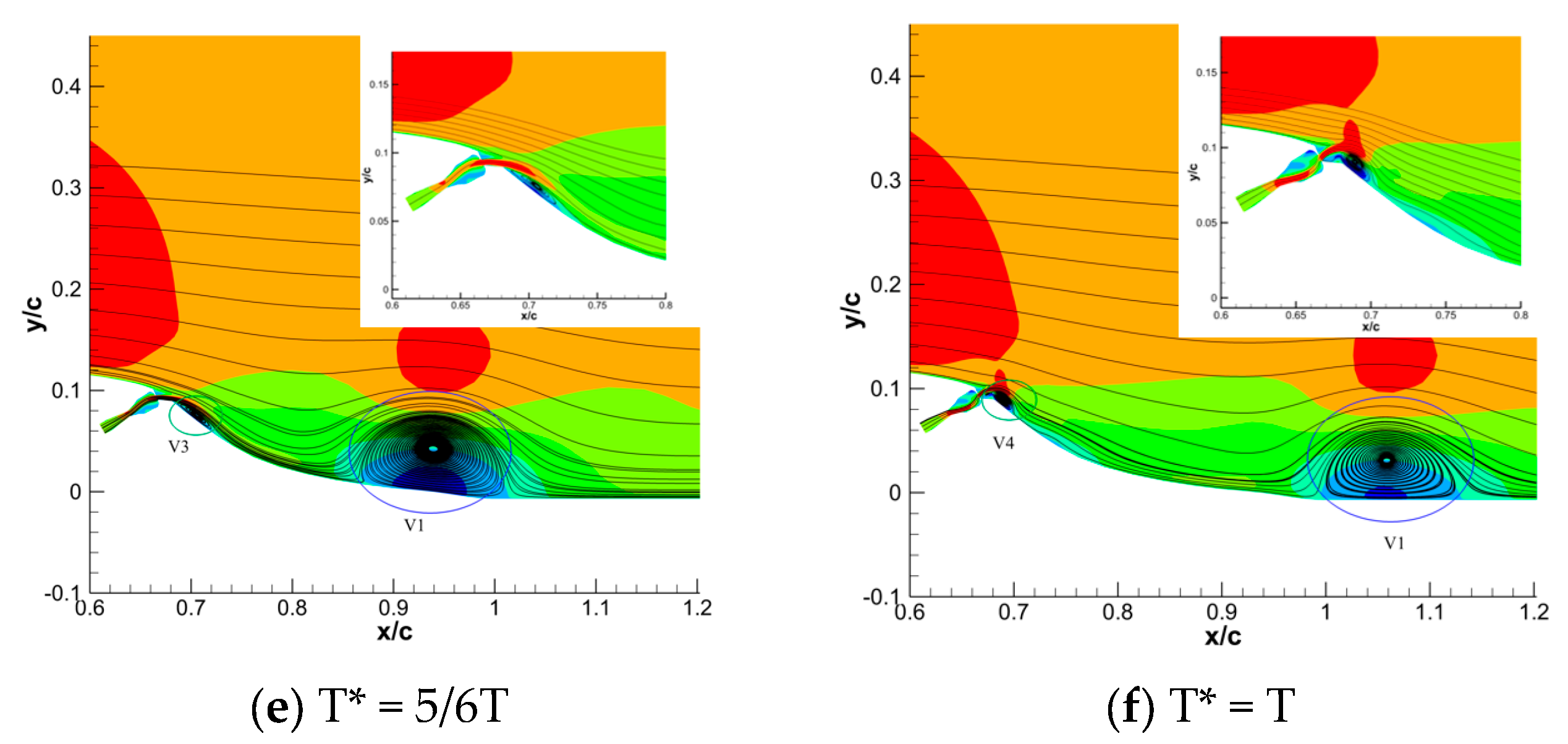
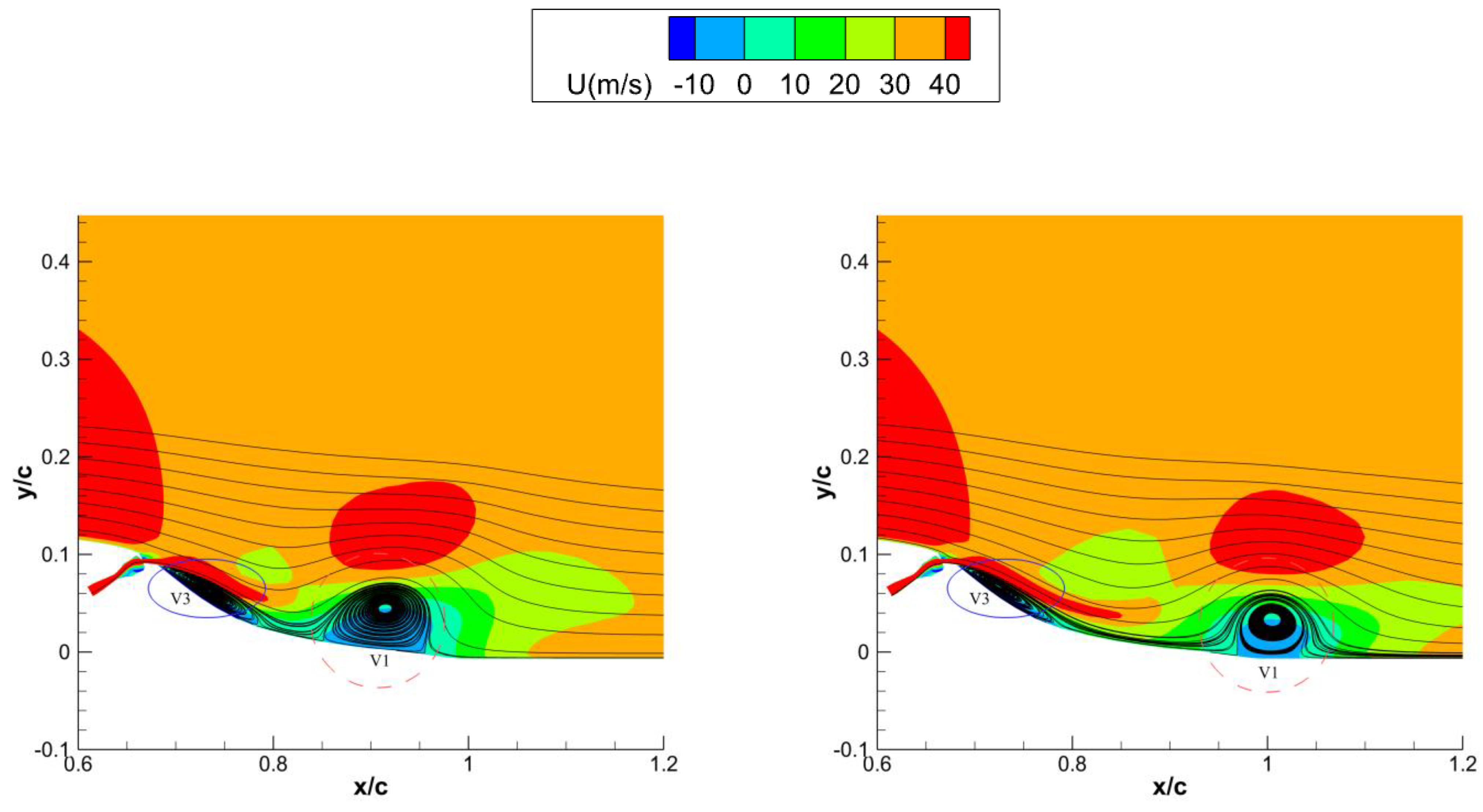
At T* = 1/2T, at this point, the jet is fully attached to the upper surface, generating a newly separated vortex V3 at the exit. Simultaneously, the size of V1 reaches its maximum and moves downstream.
At T* = 5/6T, the size of V3 does not increase significantly, and V1 continues to move downstream while its size decreases. At T* = T, the jet attaches to the lower surface, V4 appears, and V1 keeps moving downstream. At this point, one cycle is completed.
Throughout the entire cycle, V1 initially grows from a small size to form a large separation vortex, accompanied by a gradual reduction in the size of V2. When V1 reaches its maximum size, V2 disappears. Subsequently, with the appearance of V3, the development process of V1 is similar to that of V2, moving downstream and decreasing in size. When the new V1 emerges (i.e., V4), the entire cycle concludes.
The motion of V1 is also the reason behind maintaining consistency between the flow field frequency at the two monitoring points and the oscillation frequency.
At F+ = 0.375, the periodic behavior is essentially akin to F+ = 1. During the transition of the oscillating jet from the lower wall to the upper wall, V1 increases in size continuously, yet due to the longer cycle time, V1 achieves a larger size. During the phase where the oscillating jet moves from the upper wall to the lower wall, V3 maintains a constant size and the slower downstream motion of V1 results in the existence of two separation regions within the average flow field.
As shown in Figure 18, the periodic flow field for F+ = 10 exhibits similarities to the flow field for F+ = 1, but there are also some differences. From T* = 0 to T* = 1/3T, the size of V1 gradually increases; however, it remains relatively small. V2 moves downstream, but due to the shorter cycle, the movement is less pronounced. At T* = 1/2T, V1 replaces the V3 from the F+ = 1 case, and at T* = 5/6T, it merges with V2 to form a new V2.
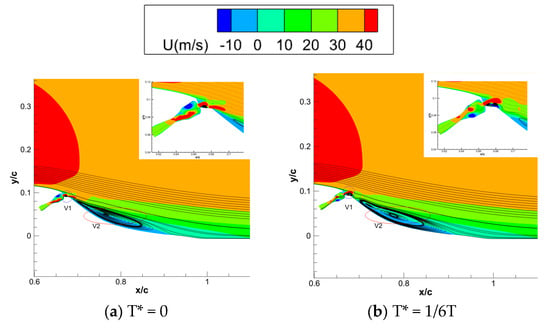
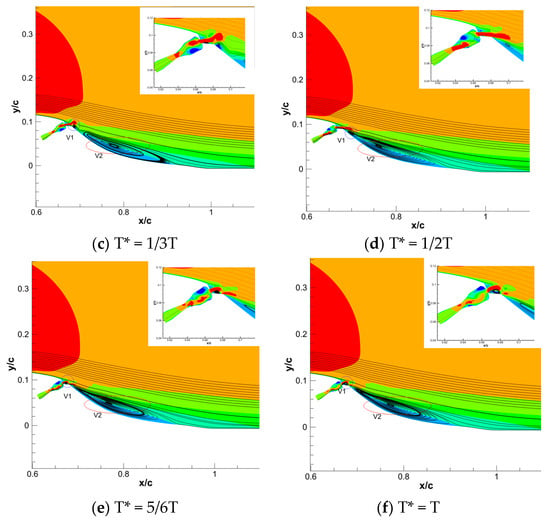
Figure 18.
Periodic flow field of the HUMP airfoil under F+ = 10 and VR = 1.8 control.
Throughout the entire cycle, the size of V2 does not exhibit as significant variations as in other F+. It essentially represents the size of the separation region. The subtle motion of V2 is the reason for the lower frequency observed at monitoring point 2.
Furthermore, the presence of V1 exhibits an entrainment effect, as it can assist in directing the outflow from the SWJ actuator and the incoming external flow along the direction of the airfoil. This results in more momentum being applied to flow control. However, at this VR, the SWJ actuator provides limited entrainment energy, and V1 dissipates too quickly, resulting in poor flow control effectiveness.
With an increase in the VR, V1 can entrain more energy, which reduces the size of V2. When VR = 3.1, V2 almost disappears, achieving complete flow separation.
In the periodic flow fields described above, studies were conducted on the cyclic flow patterns for F+ = 1 and 10, elucidating the operational mechanisms of the SWJ actuator under different F+ conditions. However, at VR = 3.1, a suppressive effect on flow control was observed specifically for F+ = 1. In response to this phenomenon, an investigation was conducted on the flow field at VR = 3.1 with F+ = 1. In Figure 19, it was found that throughout the entire cycle, the developmental trend of V1 remained consistent with previous observations. However, the size of V3 noticeably increased during this process, with its dimensions essentially matching the size of the separation vortex in the average streamwise velocity field. This finding suggests that the inhibitory effect on flow control is attributed to the growth of V3.
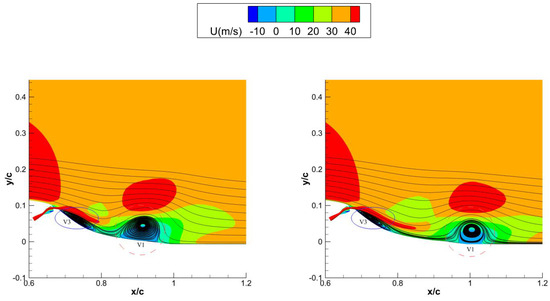
Figure 19.
The flow field of the HUMP airfoil under F+ = 1 and VR = 3.1 control.
4. Conclusions
In this paper, a feedback-free sweeping jet actuator that can efficiently decouple frequency and velocity ratio was designed and applied to flow control for the HUMP airfoil. The study investigates the impact of frequency and velocity ratio on flow control.
In the design of SWJ actuators, a novel approach has been proposed using a feedback-free configuration, where the basic shape and dimensions are similar to traditional dual-feedback SWJ actuators. However, instead of feedback channels, two synthetic jets are used to decouple frequency from velocity ratio and size. This design facilitates determining the SWJ actuator’s frequency impact on flow control. In this study, numerical simulations validated the feasibility and effectiveness of this SWJ actuator.
When applying the SWJ actuator to flow control on the Hump airfoil, the following observations were made:
When VR ≤ 1.8, the control effectiveness is optimal at F+ = 1. Specifically, at VR = 1.1, the reattachment point shifted from x/c = 1.2 to x/c = 1.03. At F+ = 10 and under VR = 1.1, the reattachment point shifted from x/c = 1.2 to x/c = 1.1. At F+ = 0.375, the control effectiveness was similar to F+ = 10. At VR = 1.8, F+ = 1 effectively shifted the reattachment point from x/c = 1.2 to x/c = 0.76, significantly reducing flow separation. In contrast, at F+ = 10 under the same VR control, the reattachment point shifted from x/c = 1.2 to x/c = 0.9. This demonstrates that by appropriately adjusting the frequency, better control effectiveness can be achieved with the SWJ actuator, validating its feasibility in practical applications.
At VR > 1.8, the control effectiveness was highest at F+ = 10, effectively preventing flow separation. Conversely, at F+ = 1 during this process, the control effectiveness improved less and even led to an increase in separation area at VR = 3.1. This is because as the VR increases, more energy is provided to the flow field to suppress flow separation. At high VR, the energy provided by the SWJ actuator is sufficient to suppress flow separation, which explains why F+ = 10 effectively prevents flow separation. At F+ = 1, the mechanism involves the SWJ actuator attaching to the lower surface of the main jet flow, creating a clockwise vortex at the outlet that effectively entrains energy from both the SWJ actuator and the incoming flow to induce it onto the airfoil surface. This causes the separation vortex to move downstream while gradually diminishing in size. When the separation vortex disappears, this clockwise vortex becomes a new separation vortex. Similarly, when the SWJ actuator attaches to the upper surface of the main jet flow, it also creates a clockwise vortex with entrainment effects, but without enlarging in size, its role is to push the previously generated separation vortex downstream, effectively maintaining consistency between the flow field frequency and the SWJ actuator frequency. This is why F+ = 1 achieves better control effectiveness at VR ≤ 1.8. However, at VR > 1.8, the maximum size of the clockwise vortex created when the SWJ actuator attaches to the upper surface of the main jet flow also increases, matching the size of the final separation vortex, leading to an increase in separation area under control F+ = 1.
Throughout the process of applying the SWJ actuator to flow control on the Hump airfoil, it was observed that both velocity ratio and frequency can influence flow control. However, the optimal frequency is not fixed. Therefore, future studies will focus on ensuring that the SWJ actuator consistently maintains its optimal frequency in flow control.
Author Contributions
Writing—original draft, T.Z.; Writing—review & editing, Y.B. All authors have read and agreed to the published version of the manuscript.
Funding
Open access funding provided by the Fundamental Research Funds and the Priority Academic Program Development of Jiangsu Higher Education Institutions, National Natural Science Foundation of China (11402115), Jiangsu Province Natural Science Foundation (BK20130782) of China.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References
- Zhang, W.; Wang, X.; Zhang, Z.; Su, T. Numerical Investigation on the Jet Characteristics and the Heat and Drag Reductions of Opposing Jet in Hypersonic Nonequilibrium Flows. Aerospace 2022, 9, 554. [Google Scholar] [CrossRef]
- Cui, P.; Jia, H.; Chen, J.; Zhou, G.; Wu, X.; Ma, M.; Li, H.; Tang, J. Numerical Investigation on Unsteady Shock Wave/Vortex/Turbulent Boundary Layer Interactions of a Hypersonic Vehicle during Its Shroud Separation. Aerospace 2022, 9, 619. [Google Scholar] [CrossRef]
- Koike, S.; Ito, Y.; Kusunose, K.; Nakajima, T.; Sato, M.; Kanda, H.; Murayama, M.; Nakakita, K.; Yamamoto, K. Effect of Vortex Generators on Two-Dimensional Wings in Transonic Flows; JAXA-RR-14-002; Japan Aerospace Exploration Agency: Tokyo, Japan, 2014; pp. 1–349. (In Japanese) [Google Scholar]
- Ichikawa, Y.; Koike, S.; Ito, Y.; Murayama, M.; Nakakita, K.; Yamamoto, K.; Kusunose, K. Size effects of vane-type rectangular vortex generators installed on high-lift swept-back wing flap on lift force and flow fields. Exp. Fluids 2021, 62, 160. [Google Scholar] [CrossRef]
- Ichikawa, Y.; Koike, S.; Kojima, Y.; Ito, Y.; Murayama, M.; Nakakita, K.; Yamamoto, K.; Iwamoto, H.; Nakajima, T.; Yamamoto, T.; et al. Wind Tunnel Testing about Flow-Separation Suppression Effect of Vortex Generators Installed on a Two Dimensional High-Lift Wing flap Surface. In Proceedings of the 60th Aircraft Symposium, Niigata-shi, Japan, 11–13 October 2022; The Japan Society for Aeronautical and Space Sciences: Tokyo, Japan, 2022; pp. 1–8. (In Japanese). [Google Scholar]
- Xu, W.; Lu, W.; Sun, D.; Ren, G.; Zou, S. Effect of pressure-side tip winglet with different heights and lengths on clearance flow in a compressor cascade. Phys. Fluids 2024, 36, 034107. [Google Scholar] [CrossRef]
- Younes, E.; Hamidouche, S.; Gautier, R.; Russeil, S. An in-depth examination of flow structures organization downstream of a delta-winglet pair vortex generator under laminar, transitional, and turbulent flow regimes. Phys. Fluids 2024, 36, 024117. [Google Scholar] [CrossRef]
- Abe, Y.; Nonomura, T.; Fujii, K. Flow instability and momentum exchange in separation control by a synthetic jet. Phys. Fluids 2023, 35, 065114. [Google Scholar] [CrossRef]
- Sun, K.; Sun, J.; Fan, Y.; Yu, L.; Chen, W.; Kong, X.; Yu, C. Characterization of a synthetic jet vortex ring flowing through honeycomb. Phys. Fluids 2023, 35, 075123. [Google Scholar] [CrossRef]
- Zhang, W.; Ding, B.; Shi, Z.; Shu, Y.; Sun, F. Investigation of drag reduction mechanism for blunt bodies with plasma spikes. Phys. Fluids 2023, 35, 086115. [Google Scholar] [CrossRef]
- Zavarian, Z.; Abdizadeh, G.R.; Noori, S. Numerical investigation of the effect of dielectric barrier discharge plasma actuator-induced momentum jet parameters on flow control of an oscillating wind turbine airfoil. Phys. Fluids 2023, 35, 065137. [Google Scholar] [CrossRef]
- Qenawy, M.; Chen, Y.; Zhu, Y.; Wang, J.; Tian, J.; Chen, B. Improving fluid flow and heat transfer of cryogen spray cooling using sweeping cold air jet. Phys. Fluids 2024, 36, 043302. [Google Scholar] [CrossRef]
- Chen, X.; Zhong, S.; Liu, T.; Ozer, O.; Gao, G. Manipulation of the flow induced by afterbody vortices using sweeping jets. Phys. Fluids 2024, 36, 035147. [Google Scholar] [CrossRef]
- Chen, X.; Zhong, S.; Ozer, O.; Weightman, A.; Gao, G. On the unsteady interactions between a sweeping jet and afterbody vortices. Phys. Fluids 2023, 35, 105153. [Google Scholar] [CrossRef]
- Greco, C.S.; Paolillo, G.; Astarita, T.; Cardone, G. The von Kármán street behind a circular cylinder: Flow control through synthetic jet placed at the rear stagnation point. J. Fluid Mech. 2020, 901, A39. [Google Scholar] [CrossRef]
- Wu, W.; Meneveau, C.; Mittal, R. Spatio-temporal dynamics of turbulent separation bubbles. J. Fluid Mech. 2020, 883, A45. [Google Scholar] [CrossRef]
- Seele, R.; Tewes, P.; Woszidlo, R.; McVeigh, M.; Lucas, N.; Wygnanski, I. Discrete sweeping jets as tools for improving the performance of the V-22. AIAA J. Aircr. 2009, 46, 2098–2106. [Google Scholar] [CrossRef]
- Woszidlo, R.; Ostermann, F.; Schmidt, H. Fundamental properties of fluidic oscillators for flow control applications. AIAA J. 2019, 57, 978–992. [Google Scholar] [CrossRef]
- Vatsa, V.N.; Duda, B.; Lin, J.C.; Melton, L.P.; O’Connell, M. Numerical simulation of a simplified high-lift CRM configuration embedded with fluidic actuators. In Proceedings of the 2018 Applied Aerodynamics Conference, Atlanta, GA, USA, 25–29 June 2018. AIAA Paper 2018-3063. [Google Scholar] [CrossRef]
- Sundström, E.; Tomac, M.N. Aeroacoustic Characteristics of a Synchronized Fluidic Oscillator. Flow Turbul. Combust 2021, 106, 61–77. [Google Scholar] [CrossRef]
- Andino, M.Y.; Lin, J.C.; Washburn, A.E.; Whalen, E.A.; Graff, E.C.; Wygnanski, I.J. Flow separation control on a full-scale vertical tail model using sweeping jet actuators. In Proceedings of the 53rd AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 5–9 January 2015; pp. 1–0785. [Google Scholar] [CrossRef]
- Zhao, T.; Bai, Y.; Gao, C.; Ding, L.; Huang, D.; Wang, W. Sweeping JET actuator for the control of flow separation on a hump airfoil. Int. J. Comput. Mater. Sci. Eng. 2024. [Google Scholar] [CrossRef]
- Aram, S.; Lee, Y.; Shan, H.; Vargas, A. Computational fluid dynamic analysis of fluidic actuator for active flow control applications. AIAA J. 2018, 56, 111–120. [Google Scholar] [CrossRef]
- Ostermann, F.; Woszidlo, R.; Nayeri, C.; Paschereit, C.O. Experimental comparison between the flow field of two common fluidic oscillator designs. In Proceedings of the 53rd AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 5–9 January 2015. AIAA Paper 1–14. [Google Scholar] [CrossRef]
- Kara, K.; Kim, D.; Morris, P.Z. Flow-separation control using sweeping jet actuator. In Proceedings of the 35th AIAA Applied Aerodynamics Conference, Denver, CO, USA, 5–9 June 2017. AIAA Paper 2017-3041. [Google Scholar] [CrossRef]
- Kara, K. Numerical simulation of a sweeping jet actuator. In Proceedings of the 34th AIAA Applied Aerodynamics Conference, Washington, DC, USA, 13–17 June 2016. AIAA Paper 1–19. [Google Scholar] [CrossRef]
- Ostermann, F.; Woszidlo, R.; Nayeri, C.; Paschereit, C.O. Phase-averaging methods for the natural flow field of a fluidic oscillator. AIAA J. 2015, 53, 2359–2368. [Google Scholar] [CrossRef]
- Ostermann, F.; Woszidlo, R.; Nayeri, C.; Paschereit, C.O. Interaction between a jet emitted by an Fluidic Oscillator and a Crossflow at a skew angle. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. AIAA Paper 2019-0887. [Google Scholar] [CrossRef]
- Wen, X.; Li, Z.; Zhou, L.; Yu, C.; Muhammad, Z.; Liu, Y.; Wang, S.; Liu, Y. Flow dynamics of a fluidic oscillator with internal geometry variations. Phys. Fluids 2020, 32, 075111. [Google Scholar] [CrossRef]
- Tomac, M.N.; de Luzan, C.F. Synchronization of a pair of opposed facing oscillators in a side-by-side configuration. Int. J. Heat Fluid Flow 2020, 84, 108605. [Google Scholar] [CrossRef]
- Kara, K. Numerical study of internal flow structures in a sweeping jet actuator. In Proceedings of the 33rd AIAA Applied Aerodynamics Conference, Dallas, TX, USA, 22–26 June 2015. AIAA Paper No. 2015-2424. [Google Scholar] [CrossRef]
- Melton, L.P.; Koklu, M.; Andino, M.; Lin, J.C. Active flow control via discrete sweeping and steady jets on a simple-hinged flap. AIAA J. 2018, 56, 2961–2973. [Google Scholar] [CrossRef]
- Koklu, M.; Owens, L.R. Comparison of sweeping jet actuators with different flow-control techniques for flow-separation control. AIAA J. 2017, 55, 848–860. [Google Scholar] [CrossRef]
- Dandois, J.; Verbeke, C.; Ternoy, F. Performance enhancement of a vertical tail model with sweeping jets. AIAA J. 2020, 58, 5202–5215. [Google Scholar] [CrossRef]
- Kim, S.H.; Kim, K.Y. Effects of installation conditions of fluidic oscillators on control of flow separation. AIAA J. 2019, 57, 5208–5219. [Google Scholar] [CrossRef]
- Portillo, D.J.; Hoffman, E.N.; Garcia, M.; LaLonde, E.; Hernandez, E.; Combs, C.S.; Hood, L. Modal Analysis of a Sweeping Jet Emitted by a Fluidic Oscillator. In Proceedings of the AIAA AVIATION Forum, Virtual, 2–6 August 2021. [Google Scholar]
- Slupski, B.Z.; Kara, K.; Parezanovic, V.; Kyritsis, D. Experimental Inner Pressure Analysis of a Sweeping Jet Actuator. In Proceedings of the 2018 Applied Aerodynamics Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- Wen, X.; Li, Z.; Liu, Y.; Wang, S. Feedback-Free and Single-Feedback Sweeping Jet Oscillators with High Sweeping Frequencies. AIAA J. 2021, 59, 2811–2815. [Google Scholar] [CrossRef]
- Greenblatt, D.; Paschal, K.B.; Yao, C.S.; Harris, J.; Schaeffler, N.W.; Washburn, A.E. Experimental investigation of separation control Part 1: Baseline and steady suction. AIAA J. 2006, 44, 2820–2830. [Google Scholar] [CrossRef]
- Borgmann, A.; Little, P.J.; Woszidlo, R. Experimental Study of Discrete Jet Forcing for Flow Separation Control on a Wall Mounted Hump. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017. AIAA Paper 2017-1450. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).