
Convergence of AI and Urban Emergency Responses: Emerging Pathway toward Resilient and Equitable Communities

Abstract
:1. Introduction
2. Development of Seismic Resilience of Modern Urban Communities
2.1. Establishment of a Resilience Assessment Framework for Integrated CISs–Communities
2.2. Research on Seismic Resilience of Modern CISs
2.2.1. Seismic Resilience of Individual CISs
2.2.2. Seismic Resilience of Interdependent CISs
3. Emergence of Resilience-Oriented Post-Shock Emergency Responses
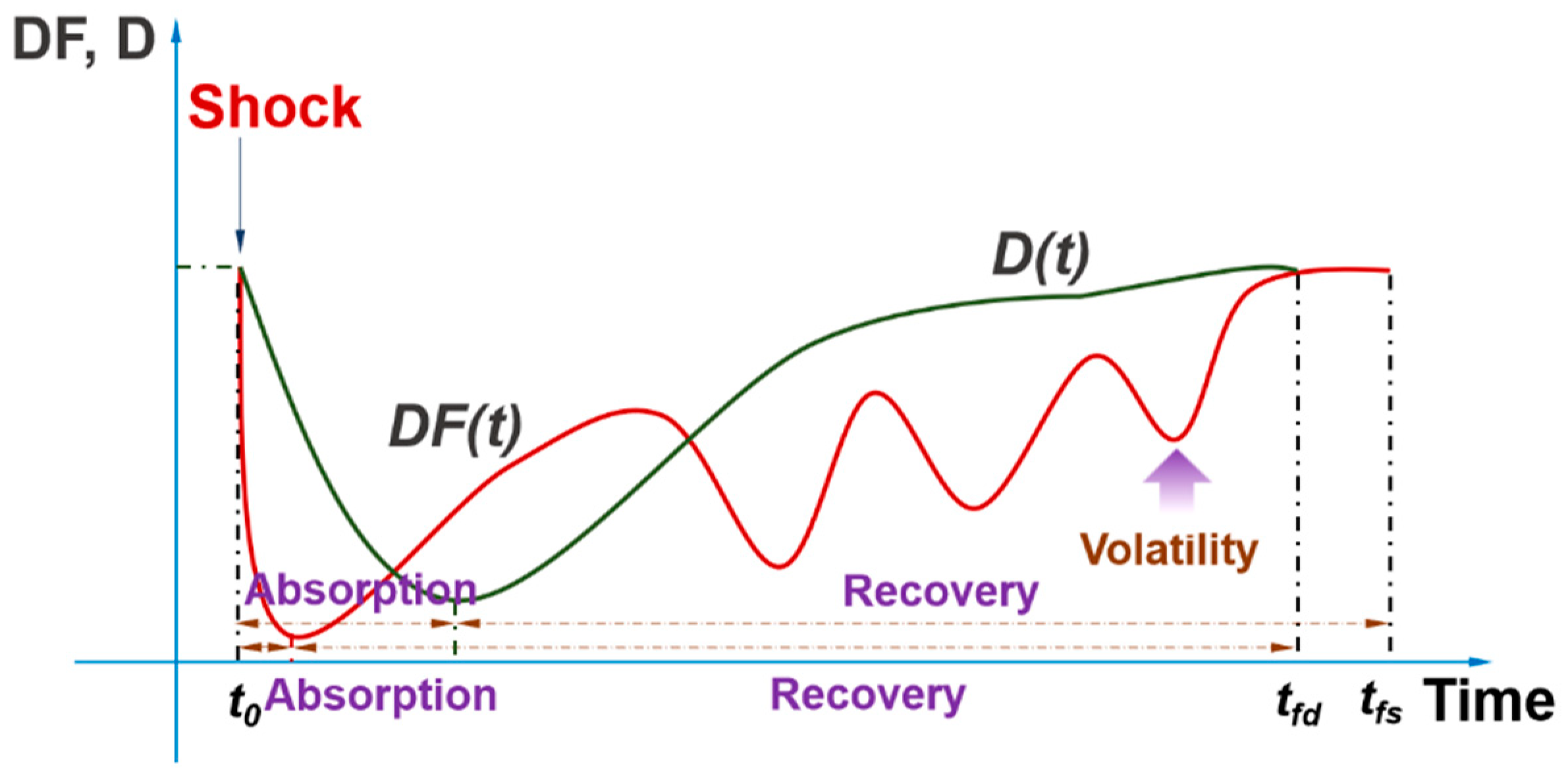
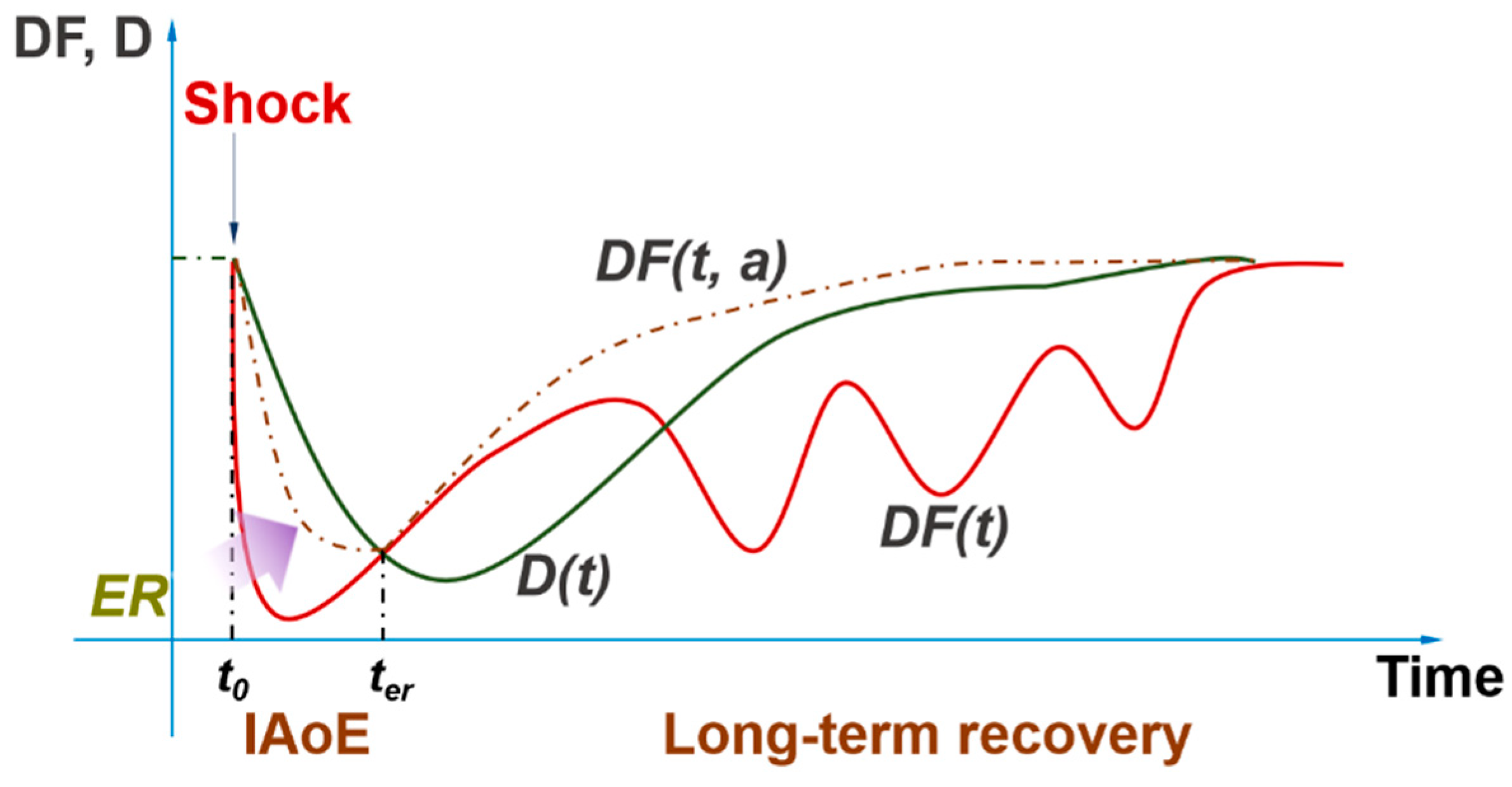
3.1. The Concept of Post-Shock Emergency Responses
3.2. Challenges Faced by Post-Shock Emergency Responses
- Challenges from a computational perspective: In the case of widespread earthquake-initiated damages, potential permutations for restoring a single CIS alone can be massive due to the scale and heterogeneity of modern CISs [81]. Brute-force search algorithms are thus computationally unaffordable for discovering the optimal sequence of restoration actions [81,82];
- Challenges from a technical perspective: In light of the potentially pervasive damage in the wake of damaging earthquakes, the emergency response associated with any single CIS could be hindered not only by the damage to the other CISs, but also by self-inflicted ones [76]; furthermore, damage to a set of different CISs providing critical services can render an affected area uninhabitable or inaccessible to human beings [83], significantly affecting community restoration efforts;
- Challenges from a socio-economic perspective: In the context of hazard-impacted communities, top-down planning is commonly favoured. These planning approaches emphasize centralized decision-making and coordination, which are crucial for efficient resource allocation, streamlined communication, and rapid deployment of emergency measures; however, top-down planning can also lead to a lack of transparency and accountability. Consequently, emergency response campaigns may be influenced by biases and misconceptions, inadvertently exacerbating environmental and societal disruptions [78].
4. Resilience-Oriented Emergency Responses Driven by Machine Learning
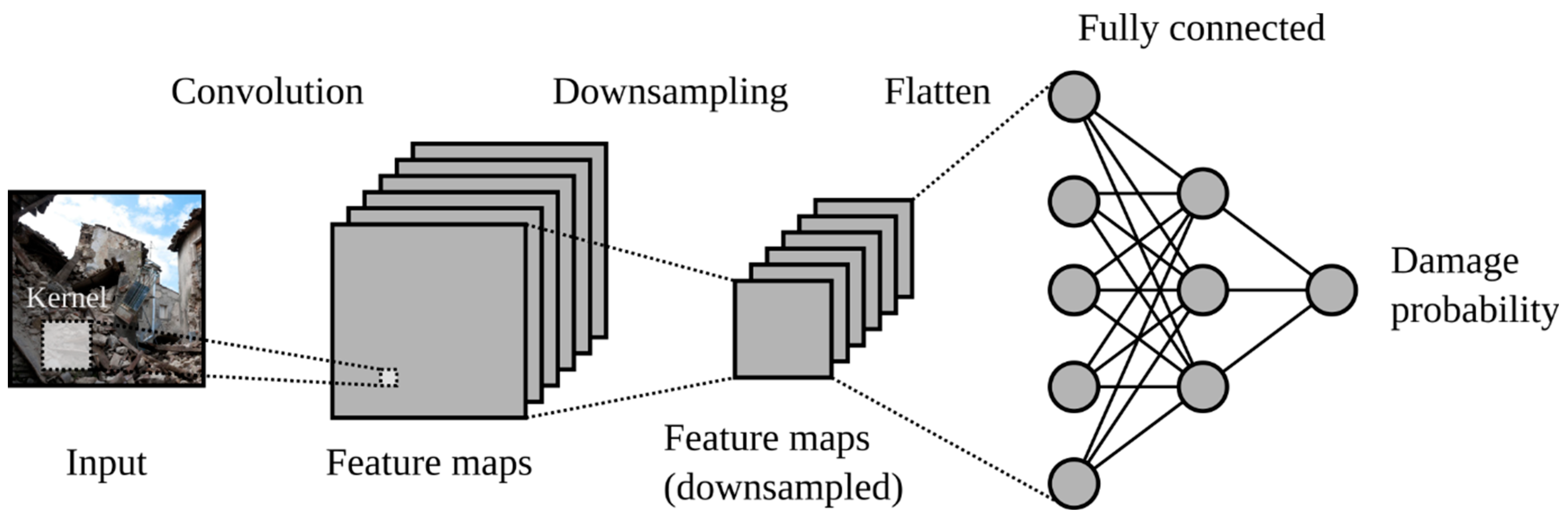
4.1. Rapid Damage Assessment
4.2. The Reinforcement Learning-Driven Emergency Response and Recovery
5. Prospects and Challenges
5.1. Holy Grail—Autonomous, Grouped, and Humanoid Recovery Robots
- Instead of human beings, these autonomous recovery robots will “bear the brunt” in the wake of catastrophes. Traditionally, human responders have borne the initial risks during catastrophes; however, the severity of natural or man-made disasters often renders affected areas uninhabitable and inaccessible to humans. For instance, in major fire accidents, smoke inhalation and extreme temperatures pose fatal threats to firefighters themselves [134]. Similarly, the release of radioactive materials triggered by hazardous events like earthquakes will substantially jeopardize the well-being of first responders [137]; consequently, not only can post-hazard emergency responses be significantly delayed and thwarted, but additional human and societal losses may also occur. To address this challenge, humanoid recovery robots—operating autonomously and cooperatively—can venture into affected zones, bearing the initial brunt of danger [136];
- The adaptivity of decision-making, as well as the agility (and manoeuvrability) of autonomous recovery robots. In urban communities facing hazardous events, post-hazard restoration decisions typically adhere to top-down, experience-based protocols; however, real-world observations reveal that restoration campaigns often suffer from sluggishness and poor management due to a lack of adaptivity in decision-making processes (i.e., decision-making lacks the agility needed to respond swiftly to dynamic situations; additionally, uncertainties and evolving conditions also challenge traditional protocols), ambiguity in stakeholder roles (can be both public and private institutions), as well as coordination gaps between them [73]; on the contrary, as manifested and inspired by a series of substantial successes in the pursuit of AI-capable agents [86,88,90], grouped and humanoid recovery robots would be able to serve as full-fledged first responders in future urban communities. Leveraging state-of-the-art AI algorithms, they can explore vast state-action spaces within hazard-impacted CISs, allowing them to chart coordinated restoration pathways, even amidst uncertainties and noise. It is therefore expected that these robots could outperform human responders, even without domain-specific knowledge [88,90]. In parallel, they could effectively mitigate the negative impact of panic and irrationality inherent in human responders and decision-makers; additionally, with quality maintenance, the robots would be readily available on-site, agile, and manoeuvrable across harsh terrains.
5.2. Challenges Ahead
- The safety of deployment. Machine learning models, particularly deep neural networks, have showcased remarkable performance in controlled benchmarks; however, their safety and trustworthiness in real-world applications raise valid concerns, especially in safety-critical scenarios like post-hazard emergency responses [6]. The crux of the issue lies in the fact that minimizing a statistically motivated loss function during training does not guarantee optimal real-world performance. When these models encounter data during in situ deployment—data that significantly diverge from their training and testing datasets—their robustness against distribution shifts becomes compromised [138], exacerbated by the scarcity of hazard-related datasets. Furthermore, uncertainty compounds the challenge of ensuring model safety [139]. Inaccurate or false predictions can have severe unintended consequences during real-world hazard events. For instance, mischaracterizing the damage status of CISs using CNN-based image recognition may lead to significant disaster mismanagement; similarly, the uncertainty and dynamics surrounding the functionality of CISs during such periods can amplify the impact of unsafe actions of autonomous agents. These actions may trigger cascading failures whose consequences could, paradoxically, go substantially beyond the initial hazard [64,65]. Against this backdrop, in-depth research should be undertaken to institutionalize the certification of autonomous recovery robots [138]. It is also vital to develop a more interpretable and scalable DRL framework [140] to enable these robots to shun unsafe actions while still fulfilling the optimization objectives of post-shock emergency response campaigns [141,142];
- Ethical decision-making. As AI penetrates modern societies, ethical questions arise regarding how AI-capable machines navigate complex decisions; for instance, autonomous vehicles, faced with unavoidable harm during crashes, must grapple with the difficult choice between running over pedestrians or sacrificing themselves and their passengers [143,144,145]. This principle of the “greater good” becomes even more intricate in the context of post-hazard emergency responses, or early warnings [146,147]. Recovery robots, deployed after disasters, face a delicate balancing act. Functionality gaps between supply and demand in hazard-impacted CISs, coupled with limited restoration resources, lead to critical decisions. These robots must prioritize certain neighbourhoods while “sacrificing” others [57]. Although well-intentioned, such decisions can evoke anxiety and discontent among local inhabitants, exacerbating societal inequality and sapping the long-term resilience of urban communities affected by hazards [148,149,150,151,152]. It is thus crucial for private and public sectors to collaborate to address such a thorny challenge by proposing an inclusive regulatory framework to guide recovery robots to select a strategy that reconciles widely recognized moral values with the self-interest of affected neighbourhoods.
6. Conclusions
- The majority of the state-of-the-art resilience assessment frameworks indiscriminately characterize the criticality across different temporal windows during hazard events. Conversely, damage or dysfunction initiated by a hazard in any single CIS tends to propagate, potentially triggering a full-blown cascading failure in the immediate aftermath of such events;
- In this context, post-shock emergency responses emerge as a promising pathway toward resilient urban communities. These responses aim to swiftly restore the functionality of hazard-impacted CISs to a minimal yet acceptable level immediately after shocking events. By effectively inhibiting potential cascading failures triggered by the initial damage, these emergency responses facilitate smoother long-term recovery;
- Practical implementation of emergency responses faces obstacles from computational, technical, and socio-economic perspectives;
- Pilot studies have utilized advanced machine learning techniques to enhance post-shock emergency responses of Critical Infrastructure Systems (CISs). These efforts underscore AI-driven strategies that can rapidly restore functionality and bolster resilience in the aftermath of disasters. Notably, deep learning has proven to be a powerful tool for swift damage assessment immediately following hazardous events. Progress in this field has established the groundwork for adaptive post-shock emergency responses, with (deep) reinforcement learning playing a crucial role;
- By integrating state-of-the-art AI with robotics engineering, autonomous, grouped, and humanoid recovery robots could potentially revolutionize urban crisis management. These robots not only shield human responders from hazard-induced dangers but also devise strategies that may surpass traditional top-down, experience-based protocols.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dunn, S.; Wilkinson, S.; Ford, A. Spatial structure and evolution of infrastructure networks. Sustain. Cities Soc. 2016, 27, 23–31. [Google Scholar] [CrossRef]
- United Nations Department of Economic and Social Affairs. World Population Prospects 2022: Summary of Results; United Nations Fund for Population Activities: New York, NY, USA, 2023. [Google Scholar]
- Bettencourt, L.M.A.; Lobo, J.; Helbing, D.; Kuhnert, C.; West, G.B. Growth, innovation, scaling, and the pace of life in cities. Proc. Natl. Acad. Sci. USA 2007, 104, 7301–7306. [Google Scholar] [CrossRef] [PubMed]
- Batty, M. The size, scale, and shape of cities. Science 2008, 319, 769–771. [Google Scholar] [CrossRef]
- Alesch, D.J. Complex urban systems and extreme events: Toward a theory of disaster recovery. In Proceedings of the 1st International Conference on Urban Disaster Reduction, Kobe, Japan, 18–20 January 2005. [Google Scholar]
- Kröger, W.; Zio, E. Vulnerable Systems; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Glaeser, E. Cities, productivity, and quality of life. Science 2011, 333, 592–594. [Google Scholar] [CrossRef]
- World Health Organization. WHO Coronavirus (COVID-19) Dashboard. 2024. Available online: https://covid19.who.int/ (accessed on 31 March 2024).
- Helbing, D. Globally networked risks and how to respond. Nature 2013, 497, 51–59. [Google Scholar] [CrossRef] [PubMed]
- Buldyrev, S.V.; Parshani, R.; Paul, G.; Stanley, H.E.; Havlin, S. Catastrophic cascade of failures in interdependent networks. Nature 2010, 464, 1025–1028. [Google Scholar] [CrossRef]
- Brummitt, C.D.; D’Souza, R.M.; Leicht, E.A. Suppressing cascades of load in interdependent networks. Proc. Natl. Acad. Sci. USA 2012, 109, E680–E689. [Google Scholar] [CrossRef] [PubMed]
- Bashan, A.; Berezin, Y.; Buldyrev, S.V.; Havlin, S. The extreme vulnerability of interdependent spatially embedded networks. Nat. Phys. 2013, 9, 667–672. [Google Scholar] [CrossRef]
- Bodenmann, L.; Galanis, P.; Broccardo, M.; Stojadinović, B. The role of risk measures in making seismic upgrading decisions. Earthq. Spectra 2020, 36, 1802–1822. [Google Scholar] [CrossRef]
- Rosowsky, D.V. Projecting the effects of a warming climate on the hurricane hazard and insured losses: Methodology and case study. Struct. Saf. 2021, 88, 102036. [Google Scholar] [CrossRef]
- Liu, C.; Ouyang, M.; Mao, Z.J.; Xu, X.L. A multi-perspective framework for seismic retrofit optimization of urban infrastructure systems. Earthq. Eng. Struct. Dyn. 2022, 51, 2771–2790. [Google Scholar] [CrossRef]
- Fraser, S.; Raby, A.; Pomonis, A.; Goda, K.; Chian, S.C.; Macabuag, J.; Offord, M.; Saito, K.; Sammonds, P. Tsunami damage to coastal defences and buildings in the March 11th 2011 Mw 9.0 Great East Japan earthquake and tsunami. Bull. Earthq. Eng. 2013, 11, 205–239. [Google Scholar] [CrossRef]
- British Broadcasting Corporation. Climate Change: Huge Toll of Extreme Weather Disasters in 2021. 2021. Available online: https://www.bbc.co.uk/news/science-environment-59761839 (accessed on 4 September 2024).
- Milly, P.C.D.; Wetherald, R.T.; Dunne, K.A.; Delworth, T.L. Increasing risk of great floods in a changing climate. Nature 2002, 415, 514–517. [Google Scholar] [CrossRef] [PubMed]
- Tellman, B.; Sullivan, J.A.; Kuhn, C.; Kettner, A.J.; Doyle, C.S.; Brakenridge, G.R.; Erickson, T.A.; Slayback, D.A. Satellite imaging reveals increased proportion of population exposed to floods. Nature 2021, 596, 80–86. [Google Scholar] [CrossRef] [PubMed]
- Bruneau, M.; Chang, S.E.; Eguchi, R.T.; Lee, G.C.; O’Rourke, T.D.; Reinhorn, A.M.; Shinozuka, M.; Tierney, K.; Wallace, W.A.; Von Winterfeldt, D. A framework to quantitatively assess and enhance the seismic resilience of communities. Earthq. Spectra 2003, 19, 733–752. [Google Scholar] [CrossRef]
- Ouyang, M.; Dueñas-Osorio, L.; Min, X. A three-stage resilience analysis framework for urban infrastructure systems. Struct. Saf. 2012, 36–37, 23–31. [Google Scholar] [CrossRef]
- Sun, L.; Didier, M.; Delé, E.; Stojadinovic, B. Probabilistic demand and supply resilience model for electric power supply system under seismic hazard. In Proceedings of the 12th International Conference on Applications of Statistics and Probability in Civil Engineering (ICASP2015), Vancouver, BC, Canada, 12–15 July 2015. [Google Scholar]
- Rinaldi, S.A.; Peerenboom, J.P.; Kelly, T.K. Identifying, understanding, and analyzing critical infrastructure interdependencies. IEEE Control Syst. Mag. 2001, 21, 11–25. [Google Scholar]
- Sun, L.; Stojadinovic, B.; Sansavini, G. Resilience evaluation framework for integrated civil infrastructure-community systems under seismic hazard. ASCE J. Infrastruct. Syst. 2019, 25, 04019016. [Google Scholar] [CrossRef]
- Blagojević, N.; Kipfer, J.; Didier, M.; Stojadinović, B. Scenario-based resilience assessment of communities with interdependent civil infrastructure systems. In Proceedings of the 17th World Conference on Earthquake Engineering (17WCEE 2020), Sendai, Japan, 13–18 September 2020. [Google Scholar]
- Zhao, T.; Sun, L. Seismic resilience assessment of critical infrastructure-community systems considering looped interdependences. Int. J. Disaster Risk Reduct. 2021, 59, 102246. [Google Scholar] [CrossRef]
- Linkov, I.; Bridges, T.; Creutzig, F.; Decker, J.; Fox-Lent, C.; Kröger, W.; Lambert, J.H.; Levermann, A.; Montreuil, B.; Nathwani, J.; et al. Changing the resilience paradigm. Nat. Clim. Change 2014, 4, 407–409. [Google Scholar] [CrossRef]
- Galasso, C.; Opabola, E.A. The 2023 Kahramanmaraş Earthquake Sequence: Finding a path to a more resilient, sustainable, and equitable society. Commun. Eng. 2024, 3, 24. [Google Scholar] [CrossRef]
- Hosseini, S.; Barker, K.; Ramirez-Marquez, J.E. A review of definitions and measures of system resilience. Reliab. Eng. Syst. Saf. 2016, 145, 47–61. [Google Scholar] [CrossRef]
- Didier, M.; Broccardo, M.; Esposito, S.; Stojadinovic, B. A compositional Demand/Supply framework to quantify the resilience of civil infrastructure systems (Re-CoDeS). Sustain. Resilient Infrastruct. 2018, 3, 86–102. [Google Scholar] [CrossRef]
- Saji, G. A post accident safety analysis report of the Fukushima Accident-Future direction of evacuation: Lessons learned. In Proceedings of the 21st International Conference on Nuclear Engineering (ICONE21), Chengdu, China, 29 July–2 August 2013. [Google Scholar]
- Zhang, Y.; Burton, H.V.; Sun, H.; Shokrabadi, M. A machine learning framework for assessing post-earthquake structural safety. Struct. Saf. 2018, 72, 1–16. [Google Scholar] [CrossRef]
- Lu, X.; Cheng, Q.; Xu, Z.; Xu, Y.; Sun, C. Real-time city-scale time-history analysis and its application in resilience-oriented earthquake emergency responses. Appl. Sci. 2019, 9, 3497. [Google Scholar] [CrossRef]
- Xie, Y.; Sichani, M.E.; Padgett, J.E.; DesRoches, R. The promise of implementing machine learning in earthquake engineering: A state-of-the-art review. Earthq. Spectra 2020, 36, 1769–1801. [Google Scholar] [CrossRef]
- Zhao, B.; Taucer, F. Performance of infrastructure during the May 12, 2008 Wenchuan Earthquake in China. J. Earthq. Eng. 2010, 14, 578–600. [Google Scholar] [CrossRef]
- Goda, K.; Pomonis, A.; Chian, S.C.; Offord, M.; Saito, K.; Sammonds, P.; Fraser, S.; Raby, A.; Macabuag, J. Ground motion characteristics and shaking damage of the 11th March 2011 Mw9.0 Great East Japan earthquake. Bull. Earthq. Eng. 2013, 11, 141–170. [Google Scholar] [CrossRef]
- Lizundia, B.; Davidson, R.A.; Hashash, Y.M.A.; Olshansky, R. Overview of the 2015 Gorkha, Nepal, Earthquake and the Earthquake Spectra special issue. Earthq. Spectra 2017, 33, S1–S20. [Google Scholar] [CrossRef]
- Okamura, M.; Bhandary, N.P.; Mori, S.; Marasini, N.; Hazarika, H. Report on a reconnaissance survey of damage in Kathmandu caused by the 2015 Gorkha Nepal earthquake. Soils Found. 2015, 55, 1015–1029. [Google Scholar] [CrossRef]
- Gokkaya, K. Geographic analysis of earthquake damage in Turkey between 1900 and 2012. Geomat. Nat. Hazards Risk 2016, 7, 1948–1961. [Google Scholar] [CrossRef]
- Nichols, J.M.; Rodgers, S. Economic and societal challenges imposed by seismic risk on the built environment. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A-Civ. Eng. 2017, 3, 04017022. [Google Scholar] [CrossRef]
- Booth, E. Dealing with earthquakes: The practice of seismic engineering ‘as if people mattered’. Bull. Earthq. Eng. 2018, 16, 1661–1724. [Google Scholar] [CrossRef]
- Aktas, Y.D.; So, E.; Johnson, C.; Cabuk, E.; Malcioglu, F.S.; Donmez, K.; Asinari, M.; Adamidis, O.; Milillo, P.; Tetik, T.; et al. Hybrid EEFIT Mission to February 2023 Kahramanmaraş Earthquake Sequence. In Proceedings of the SECED 2023 Conference Earthquake Engineering & Dynamics for a Sustainable Future, Society for Earthquake and Civil Engineering Dynamics (SECED), Cambridge, UK, 14–15 September 2023. [Google Scholar]
- Sharma, K.; Apil, K.C.; Subedi, M.; Pokharel, B. Challenges for reconstruction after M(w)7.8 Gorkha earthquake: A study on a devastated area of Nepal. Geomat. Nat. Hazards Risk 2018, 9, 760–790. [Google Scholar] [CrossRef]
- Moreno, J.; Shaw, D. Community resilience to power outages after disaster: A case study of the 2010 Chile earthquake and tsunami. Int. J. Disaster Risk Reduct. 2019, 34, 448–458. [Google Scholar] [CrossRef]
- Imperiale, A.J.; Vanclay, F. Experiencing local community resilience in action: Learning from post-disaster communities. J. Rural Stud. 2016, 47, 204–219. [Google Scholar] [CrossRef]
- Batabyal, A.A. On some aspects of ecological resilience and the conservation of species. J. Environ. Manag. 1998, 52, 373–378. [Google Scholar] [CrossRef]
- International Strategy for Disaster Reduction. Hyogo framework for action 2005–2015: Building the resilience of nations and communities to disasters. In Proceedings of the World Conference on Disaster Reduction, Kobe, Japan, 18–22 January 2005. [Google Scholar]
- Cutter, S.L. Building disaster resilience: Steps toward sustainability. Chall. Sustain. 2013, 1, 72–79. [Google Scholar] [CrossRef]
- Iuchi, K.; Johnson, L.A.; Olshansky, R.B. Securing Tohoku’s future: Planning for rebuilding in the first year following the Tohoku-Oki Earthquake and Tsunami. Earthq. Spectra 2013, 29, S479–S499. [Google Scholar] [CrossRef]
- Sun, L. Modeling the Seismic Resilience of Electric Power Supply Systems. Ph.D. Thesis, Department of Civil, Environmental and Geomatic Engineering, Swiss Federal Institute of Technology Zurich (ETH Zurich), Zurich, Switzerland, 2017. [Google Scholar]
- Cimellaro, G.P.; Reinhorn, A.M.; Bruneau, M. Performance-based metamodel for healthcare facilities. Earthq. Eng. Struct. Dyn. 2011, 40, 1197–1217. [Google Scholar] [CrossRef]
- Ameri, M.R.; van de Lindt, J.W. Seismic performance and recovery modeling of natural gas networks at the community level using building demand. J. Perform. Constr. Facil. 2019, 33, 04019043. [Google Scholar] [CrossRef]
- Liu, W.; Song, Z.; Ouyang, M.; Li, J. Recovery-based seismic resilience enhancement strategies of water distribution networks. Reliab. Eng. Syst. Saf. 2020, 203, 107088. [Google Scholar] [CrossRef]
- Shinozuka, M.; Dong, X.; Chen, T.C.; Jin, X. Seismic performance of electric transmission network under component failures. Earthq. Eng. Struct. Dyn. 2007, 36, 227–244. [Google Scholar] [CrossRef]
- Dueñas-Osorio, L.; Vemuru, S.M. Cascading failures in complex infrastructure systems. Struct. Saf. 2009, 31, 157–167. [Google Scholar] [CrossRef]
- Casari, M.; Wilkie, S.J. Sequencing lifeline repairs after an earthquake: An economic approach. J. Regul. Econ. 2005, 27, 47–65. [Google Scholar] [CrossRef]
- Sun, L.; Stojadinovic, B.; Sansavini, G. Agent-based recovery model for seismic resilience evaluation of electrified communities. Risk Anal. 2019, 7, 1597–1614. [Google Scholar] [CrossRef]
- Batty, M. Cities and Complexity: Understanding Cities with Cellular Automata, Agent-Based Models, and Fractals; MIT Press: Cambridge, MA, USA, 2007. [Google Scholar]
- Mackie, K.R.; Wong, J.M.; Stojadinovic, B. Post-earthquake bridge repair cost and repair time estimation methodology. Earthq. Eng. Struct. Dyn. 2010, 39, 281–301. [Google Scholar] [CrossRef]
- Decò, A.; Bocchini, P.; Frangopol, D.M. A probabilistic approach for the prediction of seismic resilience of bridges. Earthq. Eng. Struct. Dyn. 2013, 42, 1469–1487. [Google Scholar] [CrossRef]
- Hu, F.; Yeung, C.H.; Yang, S.; Wang, W.; Zeng, A. Recovery of infrastructure networks after localised attacks. Sci. Rep. 2016, 6, 24522. [Google Scholar] [CrossRef]
- Wu, Y.; Hou, G.; Chen, S. Post-earthquake resilience assessment and long-term restoration prioritization of transportation network. Reliab. Eng. Syst. Saf. 2021, 211, 107612. [Google Scholar] [CrossRef]
- Albert, R.; Albert, I.; Nakarado, G.L. Structural vulnerability of the North American power grid. Phys. Rev. E 2004, 69, 025103. [Google Scholar] [CrossRef] [PubMed]
- Berizzi, A. The Italian 2003 blackout. In Proceedings of the IEEE Power Engineering Society General Meeting, Denver, CO, USA, 6–10 June 2004. [Google Scholar]
- Corsi, S.; Sabelli, C. General blackout in Italy Sunday September 28, 2003, h. 03:28:00. In Proceedings of the IEEE Power Engineering Society General Meeting, Denver, CO, USA, 6–10 June 2004. [Google Scholar]
- Andersson, G.; Donalek, P.; Farmer, R.; Hatziargyriou, N.; Kamwa, I.; Kundur, P.; Martins, N.; Paserba, J.; Pourbeik, P.; Sanchez-Gasca, J.; et al. Causes of the 2003 major grid blackouts in North America and Europe, and recommended means to improve system dynamic performance. IEEE Trans. Power Syst. 2005, 20, 1922–1928. [Google Scholar] [CrossRef]
- Krishnamurthy, V.; Kwasinski, A.; Duenas-Osorio, L. Comparison of power and telecommunications dependencies and interdependencies in the 2011 Tohoku and 2010 Maule Earthquakes. J. Infrastruct. Syst. 2016, 22, 04016013. [Google Scholar] [CrossRef]
- Aydin, N.Y.; Duzgun, H.S.; Heinimann, H.R.; Wenzel, F.; Gnyawali, K.R. Framework for improving the resilience and recovery of transportation networks under geohazard risks. Int. J. Disaster Risk Reduct. 2018, 31, 832–843. [Google Scholar] [CrossRef]
- Zhang, L.L.; Liu, X.; Li, Y.P.; Liu, Y.; Liu, Z.P.; Lin, J.C.; Shen, J.; Tang, X.F.; Zhang, Y.; Liang, W.N. Emergency medical rescue efforts after a major earthquake: Lessons from the 2008 Wenchuan earthquake. Lancet 2012, 379, 853–861. [Google Scholar] [CrossRef]
- Smith, K. Environmental Hazards: Assessing Risk and Reducing Disaster, 6th ed.; Routledge: Abingdon, UK, 2013. [Google Scholar]
- Lindell, M.K.; Perry, R.W. Hazardous materials releases in the Northridge Earthquake: Implications for seismic risk assessment. Risk Anal. 1997, 17, 147–156. [Google Scholar] [CrossRef]
- Young, S.; Balluz, L.; Malilay, J. Natural and technologic hazardous material releases during and after natural disasters: A review. Sci. Total Environ. 2004, 322, 3–20. [Google Scholar] [CrossRef] [PubMed]
- Funabashi, Y.; Kitazawa, K. Fukushima in review: A complex disaster, a disastrous response. Bull. At. Sci. 2012, 68, 9–21. [Google Scholar] [CrossRef]
- Reasenberg, P.A.; Jones, L.M. Earthquake hazard after a mainshock in California. Science 1989, 243, 1173–1176. [Google Scholar] [CrossRef]
- Pollitz, F.F.; Stein, R.S.; Sevilgen, V.; Burgmann, R. The 11 April 2012 east Indian Ocean earthquake triggered large aftershocks worldwide. Nature 2012, 490, 250–253. [Google Scholar] [CrossRef]
- Sun, L.; D’Ayala, D.; Fayjaloun, R.; Gehl, P. Agent-based model on resilience-oriented emergency responses of road networks under seismic hazard. Reliab. Eng. Syst. Saf. 2021, 216, 108030. [Google Scholar] [CrossRef]
- Gehl, P.; Fayjaloun, R.; Sun, L.; Tubaldi, E.; Negulescu, C.; Ozer, E.; D’Ayala, D. Rapid earthquake loss updating of spatially distributed systems via sampling-based Bayesian inference. Bull. Earthq. Eng. 2022, 20, 3995–4023. [Google Scholar] [CrossRef]
- Imperiale, A.J.; Vanclay, F. Command-and-control, emergency powers, and the failure to observe United Nations disaster management principles following the 2009 L’Aquila earthquake. Int. J. Disaster Risk Reduct. 2019, 36, 101099. [Google Scholar] [CrossRef]
- Gehl, P.; Auclair, S.; Fayjaloun, R.; Meresse, P. Decision support for emergency road traffic management in post-earthquake conditions. Int. J. Disaster Risk Reduct. 2022, 77, 103098. [Google Scholar] [CrossRef]
- Mavroulis, S.; Ilgac, M.; Tunca, M.; Lekkas, E.; Püskülcü, S.; Kourou, A.; Sextos, A.; Mavrouli, M.; Can, G.; Thoma, T.; et al. Emergency response, intervention, and societal recovery in Greece and Turkey after the 30th October 2020, M-W=7.0, Samos (Aegean Sea) earthquake. Bull. Earthq. Eng. 2022, 20, 7933–7955. [Google Scholar] [CrossRef]
- Ausiello, G.; Marchetti-Spaccamela, A.; Crescenzi, P.; Gambosi, G.; Protasi, M.; Kann, V. Complexity and Approximation (Corrected Ed.); Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Powell, W.B. A unified framework for stochastic optimization. Eur. J. Oper. Res. 2019, 275, 795–821. [Google Scholar] [CrossRef]
- Morita, N.; Miura, M.; Yoshida, M.; Kumagai, A.; Ohtsuru, A.; Usa, T.; Kudo, T.; Takamura, N.; Yamashita, S.; Matsuda, N. Spatiotemporal characteristics of internal radiation exposure in evacuees and first responders after the radiological accident in Fukushima. Radiat. Res. 2013, 180, 299–306. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Rusu, A.A.; Veness, J.; Bellemare, M.G.; Graves, A.; Riedmiller, M.; Fidjeland, A.K.; Ostrovski, G.; et al. Human-level control through deep reinforcement learning. Nature 2015, 518, 529–533. [Google Scholar] [CrossRef]
- Schmidt, M.; Lipson, H. Distilling free-form natural laws from experimental data. Science 2009, 324, 81–85. [Google Scholar] [CrossRef]
- Silver, D.; Huang, A.; Maddison, C.J.; Guez, A.; Sifre, L.; van den Driessche, G.; Schrittwieser, J.; Antonoglou, I.; Panneershelvam, V.; Lanctot, M.; et al. Mastering the game of Go with deep neural networks and tree search. Nature 2016, 529, 484–489. [Google Scholar] [CrossRef]
- Silver, D.; Schrittwieser, J.; Simonyan, K.; Antonoglou, I.; Huang, A.; Guez, A.; Hubert, T.; Baker, L.; Lai, M.; Bolton, A.; et al. Mastering the game of Go without human knowledge. Nature 2017, 550, 354–359. [Google Scholar] [CrossRef] [PubMed]
- Kwiatkowski, R.; Lipson, H. Task-agnostic self-modeling machines. Sci. Robot. 2019, 4, eaau9354. [Google Scholar] [CrossRef] [PubMed]
- Schrittwieser, J.; Antonoglou, I.; Hubert, T.; Simonyan, K.; Sifre, L.; Schmitt, S.; Guez, A.; Lockhart, E.; Hassabis, D.; Graepel, T.; et al. Mastering Atari, Go, chess and shogi by planning with a learned model. Nature 2020, 588, 604–609. [Google Scholar] [CrossRef] [PubMed]
- Jumper, J.; Evans, R.; Pritzel, A.; Green, T.; Figurnov, M.; Ronneberger, O.; Tunyasuvunakool, K.; Bates, R.; Žídek, A.; Potapenko, A.; et al. Highly accurate protein structure prediction with AlphaFold. Nature 2021, 596, 583–589. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.X.; Shen, J.K.; Zhu, B.J. A review of the research and application of deep learning-based computer vision in structural damage detection. Earthq. Eng. Eng. Vib. 2022, 21, 1–21. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Rawat, W.; Wang, Z.H. Deep convolutional neural networks for image classification: A comprehensive review. Neural Comput. 2017, 29, 2352–2449. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Z.Q.; Zheng, P.; Xu, S.T.; Wu, X.D. Object detection with deep learning: A review. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3212–3232. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Ouyang, W.L.; Wang, X.G.; Fieguth, P.; Chen, J.; Liu, X.W.; Pietikainen, M. Deep learning for generic object detection: A survey. Int. J. Comput. Vis. 2020, 128, 261–318. [Google Scholar] [CrossRef]
- Ghosh, S.; Das, N.; Das, I.; and Maulik, U. Understanding deep learning techniques for image segmentation. ACM Comput. Surv. 2019, 52, 73. [Google Scholar] [CrossRef]
- Lateef, F.; Ruichek, Y. Survey on semantic segmentation using deep learning techniques. Neurocomputing 2019, 338, 321–348. [Google Scholar] [CrossRef]
- Liu, X.L.; Deng, Z.D.; Yang, Y.H. Recent progress in semantic image segmentation. Artif. Intell. Rev. 2019, 52, 1089–1106. [Google Scholar] [CrossRef]
- Sony, S.; Dunphy, K.; Sadhu, A.; Capretz, M. A systematic review of convolutional neural network-based structural condition assessment techniques. Eng. Struct. 2021, 226, 111347. [Google Scholar] [CrossRef]
- Mondal, T.G.; Jahanshahi, M.R.; Wu, R.T.; Wu, Z.Y. Deep learning-based multi-class damage detection for autonomous post-disaster reconnaissance. Struct. Control Health Monit. 2020, 27, e2507. [Google Scholar]
- Pan, X.; Yang, T.Y. Postdisaster imaged-based damage detection and repair cost estimation of reinforced concrete buildings using dual convolutional neural networks. Comput.-Aided Civ. Infrastruct. Eng. 2020, 35, 495–510. [Google Scholar] [CrossRef]
- Liang, X. Image-based post-disaster inspection of reinforced concrete bridge systems using deep learning with Bayesian optimization. Comput.-Aided Civ. Infrastruct. Eng. 2019, 34, 415–430. [Google Scholar] [CrossRef]
- Chachra, G.; Kong, Q.K.; Huang, J.; Korlakunta, S.; Grannen, J.; Robson, A.; Allen, R.M. Detecting damaged buildings using real-time crowdsourced images and transfer learning. Sci. Rep. 2022, 12, 8968. [Google Scholar] [CrossRef]
- Braik, A.M.; Koliou, M. Automated building damage assessment and large-scale mapping by integrating satellite imagery, GIS, and deep learning. Comput.-Aided Civ. Infrastruct. Eng. 2024, 39, 2389–2404. [Google Scholar] [CrossRef]
- Shamsabadi, E.A.; Xu, C.; Rao, A.S.; Nguyen, T.; Ngo, T.; Dias-da-Costa, D. Vision transformer-based autonomous crack detection on asphalt and concrete surfaces. Autom. Constr. 2022, 140, 104316. [Google Scholar] [CrossRef]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction, 2nd ed.; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Bellman, R. A Markovian decision process. J. Math. Mech. 1957, 6, 679–684. [Google Scholar] [CrossRef]
- Schwarting, W.; Pierson, A.; Alonso-Mora, J.; Karaman, S.; Rus, D. Social behavior for autonomous vehicles. Proc. Natl. Acad. Sci. USA 2019, 116, 24972–24978. [Google Scholar] [CrossRef] [PubMed]
- Silver, D.; Hubert, T.; Schrittwieser, J.; Antonoglou, I.; Lai, M.; Guez, A.; Lanctot, M.; Sifre, L.; Kumaran, D.; Graepel, T.; et al. A general reinforcement learning algorithm that masters chess, shogi, and Go through self-play. Science 2018, 362, 1140–1144. [Google Scholar] [CrossRef] [PubMed]
- Nozhati, S.; Sarkale, Y.; Ellingwood, B.; Chong, E.K.P.; Mahmoud, H. Near-optimal planning using approximate dynamic programming to enhance post-hazard community resilience management. Reliab. Eng. Syst. Saf. 2019, 181, 116–126. [Google Scholar] [CrossRef]
- Tao, W.; Wang, N. Determination of optimum post-earthquake restoration strategies for highway bridges by Markov Decision Process. In Proceedings of the 13th International Conference on Applications of Statistics and Probability in Civil Engineering (ICASP13), Seoul, Republic of Korea, 26–30 May 2019. [Google Scholar]
- Sun, L.; Shawe-Taylor, J.; D’Ayala, D. Artificial intelligence-informed planning for the emergency response of hazard-impacted road networks. Sci. Rep. 2022, 12, 16286. [Google Scholar]
- Inanlouganji, A.; Pedrielli, G.; Reddy, T.A.; Aponte, F.T. A computational approach for real-time stochastic recovery of electric power networks during a disaster. Transp. Res. Part E Logist. Transp. Rev. 2022, 163, 102752. [Google Scholar] [CrossRef]
- Zhang, N.; Alipour, A. A stochastic programming approach to enhance the resilience of infrastructure under weather-related risk. Comput.-Aided Civ. Infrastruct. Eng. 2023, 38, 411–432. [Google Scholar] [CrossRef]
- Liang, H.; Xie, Q. Resilience-Based Sequential Recovery Planning for Substations Subjected to Earthquakes. IEEE Trans. Power Deliv. 2023, 38, 353–362. [Google Scholar] [CrossRef]
- Xu, M.; Ouyang, M.; Hong, L.; Mao, Z.J.; Xu, X.L. Resilience-driven repair sequencing decision under uncertainty for critical infrastructure systems. Reliab. Eng. Syst. Saf. 2022, 221, 108378. [Google Scholar] [CrossRef]
- Xu, M.; Li, G.Y.; Chen, A. Resilience-driven post-disaster restoration of interdependent infrastructure systems under different decision-making environments. Reliab. Eng. Syst. Saf. 2024, 241, 109599. [Google Scholar] [CrossRef]
- Nozhati, S. A resilience-based framework for decision making based on simulation-optimization approach. Struct. Saf. 2021, 89, 102032. [Google Scholar] [CrossRef]
- Balakrishnan, S.; Zhang, Z. Criticality and Susceptibility Indexes for Resilience-Based Ranking and Prioritization of Components in Interdependent Infrastructure Networks. J. Manag. Eng. 2020, 36, 04020022. [Google Scholar] [CrossRef]
- Valcamonico, D.; Sansavini, g.; Zio, E. Cooperative co-evolutionary approach to optimize recovery for improving resilience in multi-communities. Reliab. Eng. Syst. Saf. 2020, 197, 106800. [Google Scholar] [CrossRef]
- Yoon, S.; Suh, W.; Lee, Y.J. Optimal decision making in post-hazard bridge recovery strategies for transportation networks after seismic events. Geomat. Nat. Hazards Risk 2021, 12, 2629–2653. [Google Scholar] [CrossRef]
- Fang, Y.P.; Zio, E. An adaptive robust framework for the optimization of the resilience of interdependent infrastructures under natural hazards. Eur. J. Oper. Res. 2019, 276, 1119–1136. [Google Scholar] [CrossRef]
- Ghannad, P.; Lee, Y.C.; Friedland, C.J.; Choi, J.O.; Yang, E. Multiobjective Optimization of Postdisaster Reconstruction Processes for Ensuring Long-Term Socioeconomic Benefits. J. Manag. Eng. 2020, 36, 04020038. [Google Scholar] [CrossRef]
- Fan, X.; Zhang, X.; Yu, X.B. A graph convolution network-deep reinforcement learning model for resilient water distribution network repair decisions. Comput. Aided Civ. Infrastruct. 2022, 37, 1547–1565. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, Y.; Lu, X.Z.; Guo, W.; Miao, H.Q. Multi-agent deep reinforcement learning based decision support model for resilient community post-hazard recovery. Reliab. Eng. Syst. Saf. 2024, 242, 109754. [Google Scholar] [CrossRef]
- Nozhati, S.; Sarkale, Y.; Chong, E.K.P.; Ellingwood, B.R. Optimal stochastic dynamic scheduling for managing community recovery from natural hazards. Reliab. Eng. Syst. Saf. 2020, 193, 106627. [Google Scholar] [CrossRef]
- Werfel, J.; Petersen, K.; Nagpal, R. Designing collective behavior in a termite-inspired robot construction team. Science 2014, 343, 754–758. [Google Scholar] [CrossRef] [PubMed]
- Petersen, K.H.; Napp, N.; Stuart-Smith, R.; Rus, D.; Kovac, M. A review of collective robotic construction. Sci. Robot. 2019, 4, eaau8479. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Lipson, H.; Kurman, M. Driverless at Last: Cars, Artificial Intelligence, and You; MIT Press: Cambridge, MA, USA, 2022. [Google Scholar]
- Ma, Q.C.; Kobayashi, E.; Suenaga, H.; Hara, K.; Wang, J.C.; Nakagawa, K.; Sakuma, I.; Masamune, K. Autonomous surgical robot with camera-based markerless navigation for oral and maxillofacial surgery. IEEE/ASME Trans. Mechatron. 2020, 25, 1084–1094. [Google Scholar] [CrossRef]
- Murphy, R.R. Trial by fire-Activities of the rescue robots at the World Trade Center from 11–21 September 2001. IEEE Robot. Autom. Mag. 2004, 11, 50–61. [Google Scholar] [CrossRef]
- Holley, P. Firefighters had a secret weapon when Notre Dame caught fire: A robot named ‘Colossus’. The Washington Post, 17 April 2019. Available online: https://www.washingtonpost.com/technology/2019/04/17/firefighters-had-secret-weapon-when-notre-dame-caught-fire-robot-named-colossus/ (accessed on 17 April 2019).
- Murphy, R.R.; Kravitz, J.; Stover, S.L.; Shoureshi, R. Novel application of robotics mobile robots in mine rescue and recovery. IEEE Robot. Autom. Mag. 2009, 16, 91–103. [Google Scholar] [CrossRef]
- Murphy, R.R. Disaster Robotics; MIT Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Tominaga, T.; Hachiya, M.; Tatsuzaki, H.; Akashi, M. The accident at the Fukushima Daiichi Nuclear Power Plant in 2011. Health Phys. 2014, 106, 630–637. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.W.; Kroening, D.; Ruan, W.J.; Sharp, J.; Sun, Y.C.; Thamo, E.; Wu, M.; Yi, X.P. A survey of safety and trustworthiness of deep neural networks: Verification, testing, adversarial attack and defence, and interpretability? Comput. Sci. Rev. 2020, 37, 100270. [Google Scholar] [CrossRef]
- Abdar, M.; Pourpanah, F.; Hussain, S.; Rezazadegan, D.; Liu, L.; Ghavamzadeh, M.; Fieguth, P.; Cao, X.; Khosravi, A.; Acharya, U.R.; et al. A review of uncertainty quantification in deep learning: Techniques, applications and challenges. Inf. Fusion 2021, 76, 243–297. [Google Scholar] [CrossRef]
- Rudin, C. Stop explaining black box machine learning models for high stakes decisions and use interpretable models instead. Nat. Mach. Intell. 2019, 1, 206–215. [Google Scholar] [CrossRef]
- Turchetta, M.; Berkenkamp, F.; Krause, A. Safe exploration in finite Markov Decision Processes with Gaussian Processes. In Proceedings of the 29th Conference on Neural Information Processing Systems (NIPS 2016), Barcelona, Spain, 5–10 December 2016. [Google Scholar]
- Wachi, A.; Sui, Y.; Yue, Y.; Ono, M. Safe exploration and optimization of constrained MDPs using Gaussian Processes. Proc. AAAI Conf. Artif. Intell. 2018, 32, 6548–6555. [Google Scholar] [CrossRef]
- Bonnefon, J.F.; Shariff, A.; Rahwan, I. The social dilemma of autonomous vehicles. Science 2016, 352, 1573–1576. [Google Scholar] [CrossRef] [PubMed]
- Awad, E.; Dsouza, S.; Kim, R.; Schulz, J.; Henrich, J.; Shariff, A.; Bonnefon, J.F.; Rahwan, I. The moral machine experiment. Nature 2018, 563, 59–64. [Google Scholar] [CrossRef] [PubMed]
- Rahwan, I.; Cebrian, M.; Obradovich, N.; Bongard, J.; Bonnefon, J.F.; Breazeal, C.; Crandall, J.W.; Christakis, N.A.; Couzin, I.D.; Jackson, M.O.; et al. Machine behaviour. Nature 2019, 568, 477–486. [Google Scholar] [CrossRef] [PubMed]
- Velazquez, O.; Pescaroli, G.; Cremen, G.; Galasso, C. A Review of the technical and socio-organizational components of earthquake early warning systems. Front. Earth Sci. 2020, 8, 533498. [Google Scholar] [CrossRef]
- Cremen, G.; Galasso, C. A decision-making methodology for risk-informed earthquake early warning. Computer-Aided Civ. Infrastruct. Eng. 2021, 36, 747–761. [Google Scholar] [CrossRef]
- Cremen, G.; Galasso, C.; McCloskey, J.; Barcena, A.; Creed, M.; Filippi, M.E.; Gentile, R.; Jenkins, L.T.; Kalaycioglu, M.; Mentese, E.Y.; et al. A state-of-the-art decision-support environment for risk-sensitive and pro-poor urban planning and design in Tomorrow’s cities. Int. J. Disaster Risk Reduct. 2023, 85, 103400. [Google Scholar] [CrossRef]
- Galasso, C.; McCloskey, J.; Pelling, M.; Hope, M.; Bean, C.J.; Cremen, G.; Guragain, R.; Hancilar, U.; Menoscal, J.; Mwang’a, K.; et al. Editorial. Risk-based, pro-poor urban design and planning for Tomorrow’s Cities. Int. J. Disaster Risk Reduct. 2021, 58, 102158. [Google Scholar] [CrossRef]
- Mesta, C.; Cremen, G.; Galasso, C. Urban growth modelling and social vulnerability assessment for a hazardous Kathmandu Valley. Sci. Rep. 2022, 12, 6152. [Google Scholar] [CrossRef]
- Soden, R.; Lallemant, D.; Kalirai, M.; Liu, C.; Wagenaar, D.; Jit, S. The importance of accounting for equity in disaster risk models. Commun. Earth Environ. 2023, 4, 386. [Google Scholar] [CrossRef]
- Caldarelli, G.; Arcaute, E.; Barthelemy, M.; Batty, M.; Gershenson, C.; Helbing, D.; Mancuso, S.; Moreno, Y.; Ramasco, J.J.; Rozenblat, C.; et al. The role of complexity for digital twins of cities. Nat. Comput. Sci. 2023, 3, 374–381. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Li, H.; Nagel, J.; Yang, S. Convergence of AI and Urban Emergency Responses: Emerging Pathway toward Resilient and Equitable Communities. Appl. Sci. 2024, 14, 7949. https://doi.org/10.3390/app14177949
Sun L, Li H, Nagel J, Yang S. Convergence of AI and Urban Emergency Responses: Emerging Pathway toward Resilient and Equitable Communities. Applied Sciences. 2024; 14(17):7949. https://doi.org/10.3390/app14177949
Chicago/Turabian StyleSun, Li, Haijiang Li, Joseph Nagel, and Siyao Yang. 2024. "Convergence of AI and Urban Emergency Responses: Emerging Pathway toward Resilient and Equitable Communities" Applied Sciences 14, no. 17: 7949. https://doi.org/10.3390/app14177949