
A High-Precision Active Vibration Isolation Control System: Experimental Study



Abstract
:1. Introduction
2. System Modeling
- is the state vector containing the translational and rotational displacements and velocities of the top platform;
- is the control input vector that contains the total of forces and torques in the corresponding 6-DoF;
- is the output vector of the control system, which consists of the 6-DoF velocities;
- is the vibration, i.e., all displacements and velocities, from the base platform;
- contains the other disturbances acting directly on the top platform;
- The coefficient matrices and are written as in [18].
3. Controller Design
3.1. Design of Feedforward Control
3.2. Design of Robust Feedback Control
3.3. Computation of Actuating Signals and Measurement Outputs
4. Experimental Study
4.1. System Implementation
- The System Identification toolbox of Mathworks MATLAB is used to identify the system parameters such as the nominal stiffness and damping ratio of the springs. The system matrices are subsequently obtained.
- The feedforward control law is formulated as in Section 3.1.
- The weighting functions are obtained as in Appendix B and, then, the controller matrix K(s) is acquired by applying the function ‘mixsyn’ in MATLAB. The Model Reducer toolbox is used to reduce the order of the controllers. The balanced truncation method is applied (Hankel singular values) with a frequency range focused from 0.01 to 100 [Hz].
- The parameters of the controlled AVIS are listed in Table 1 below.
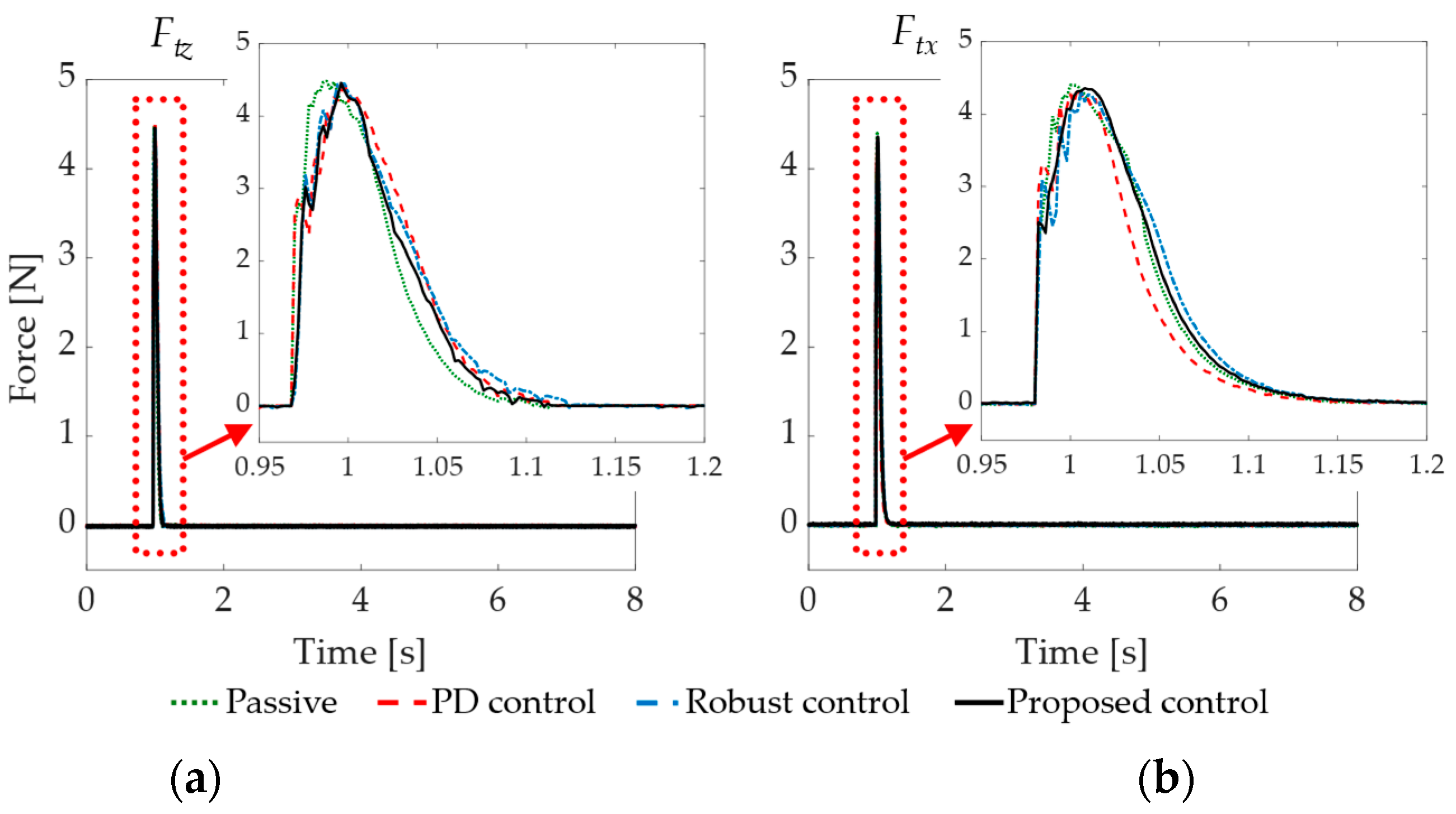
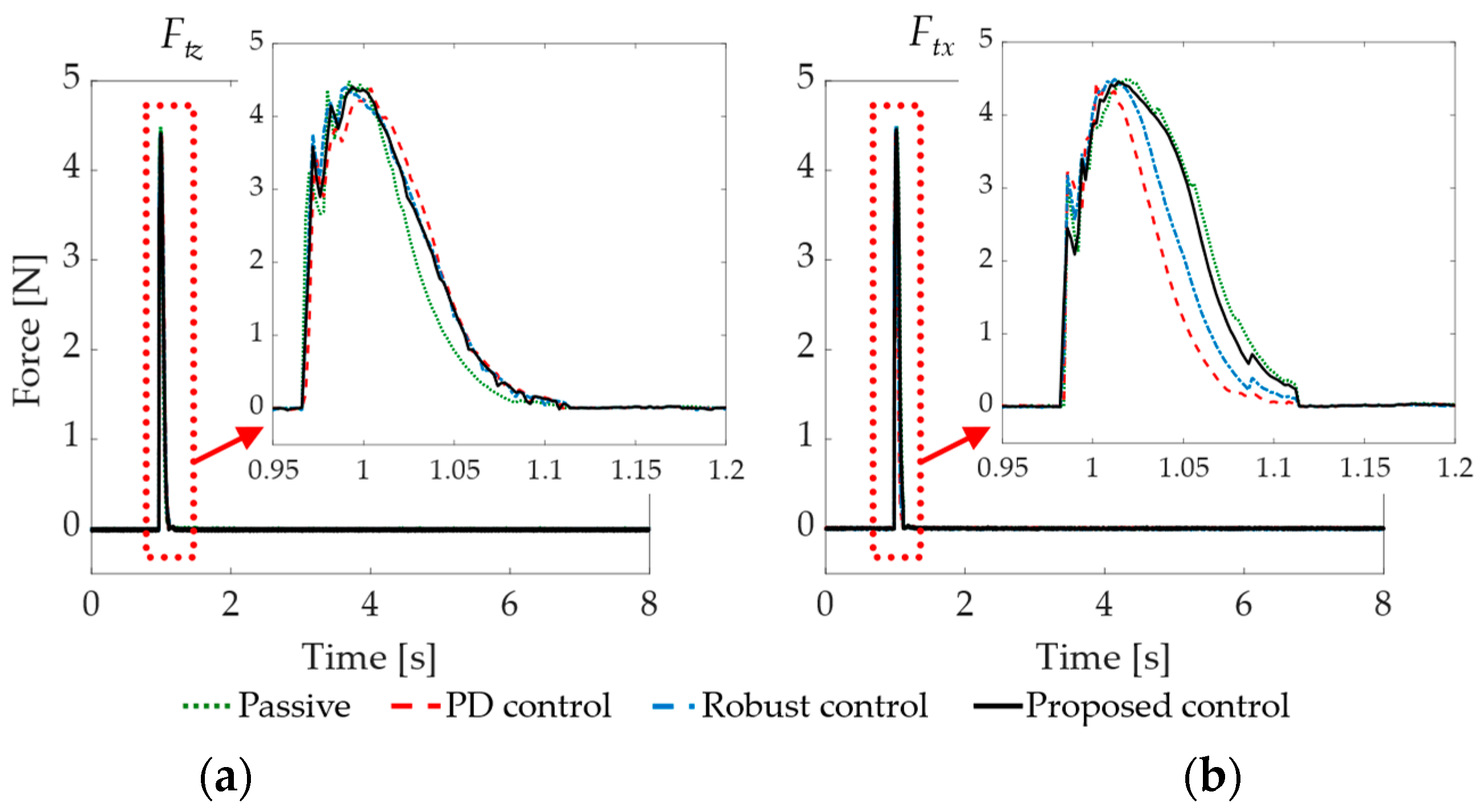
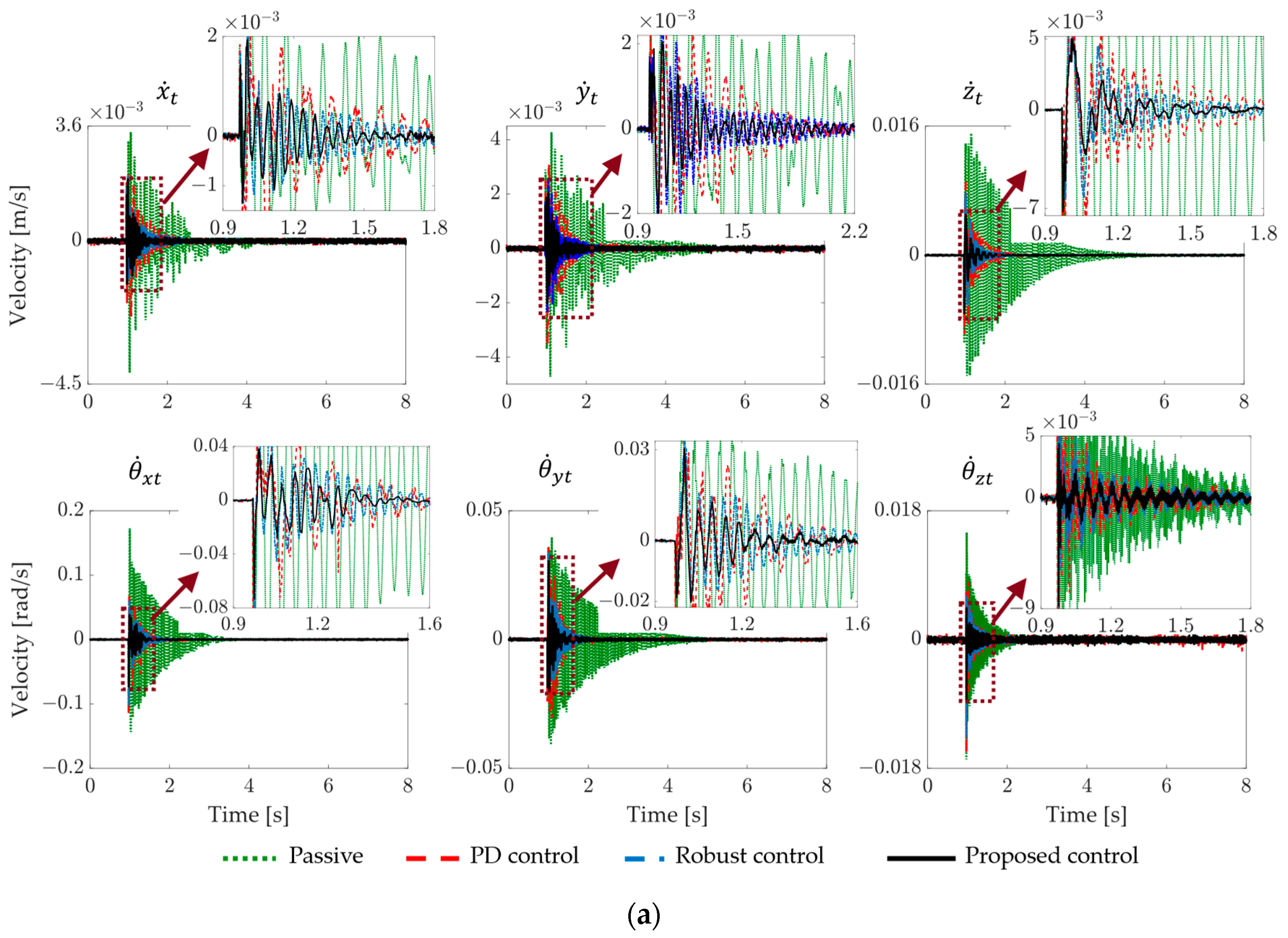
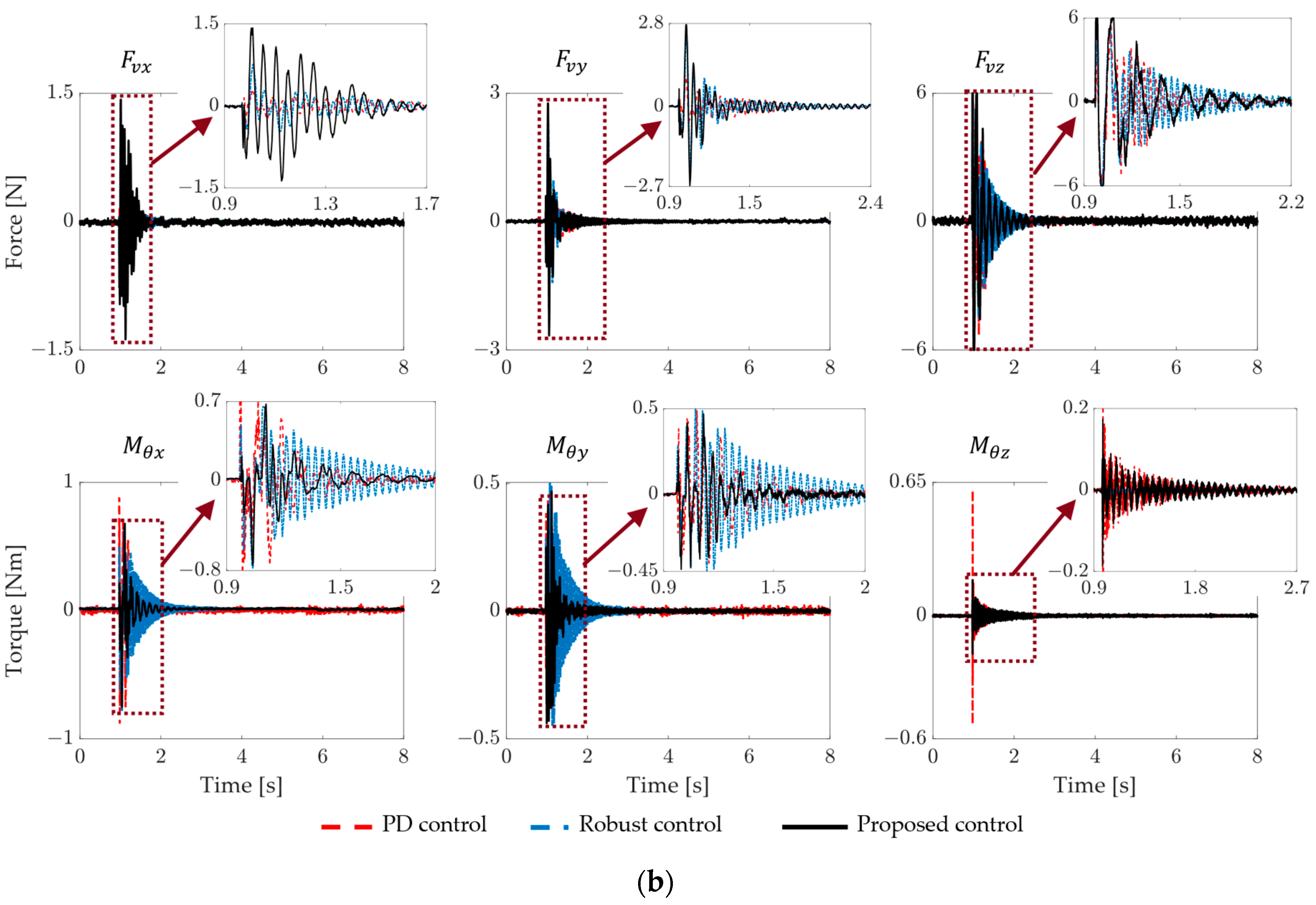
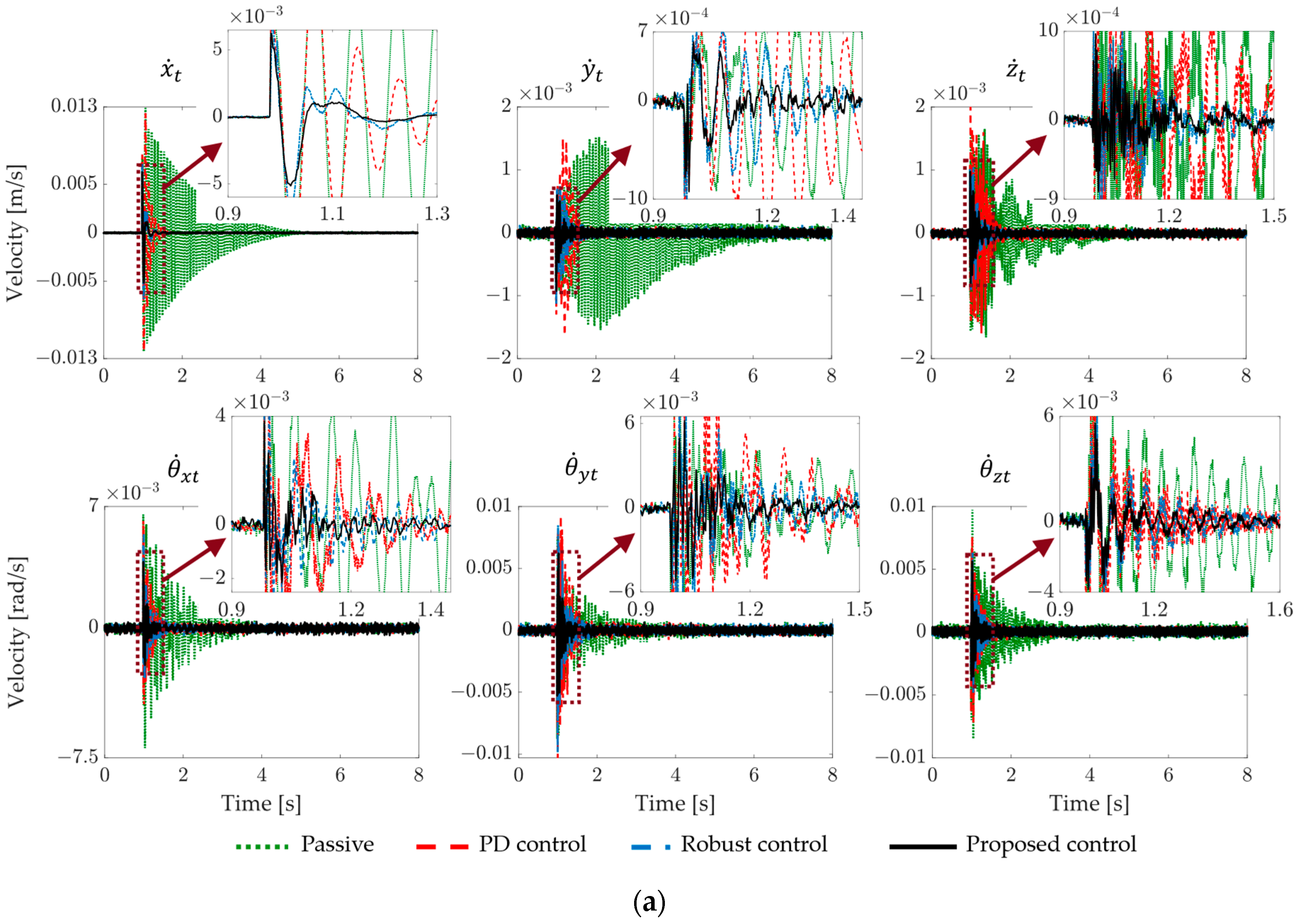
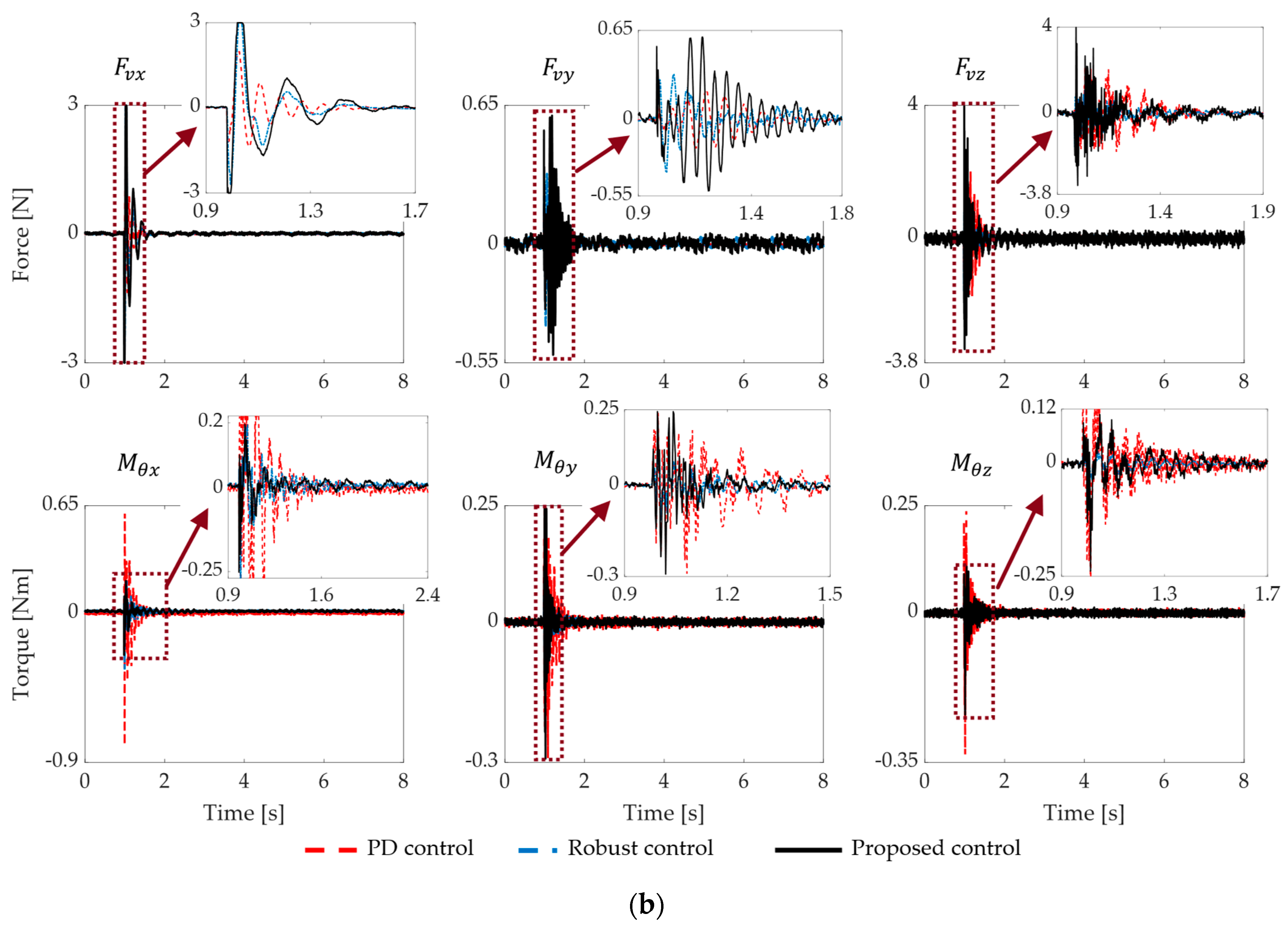
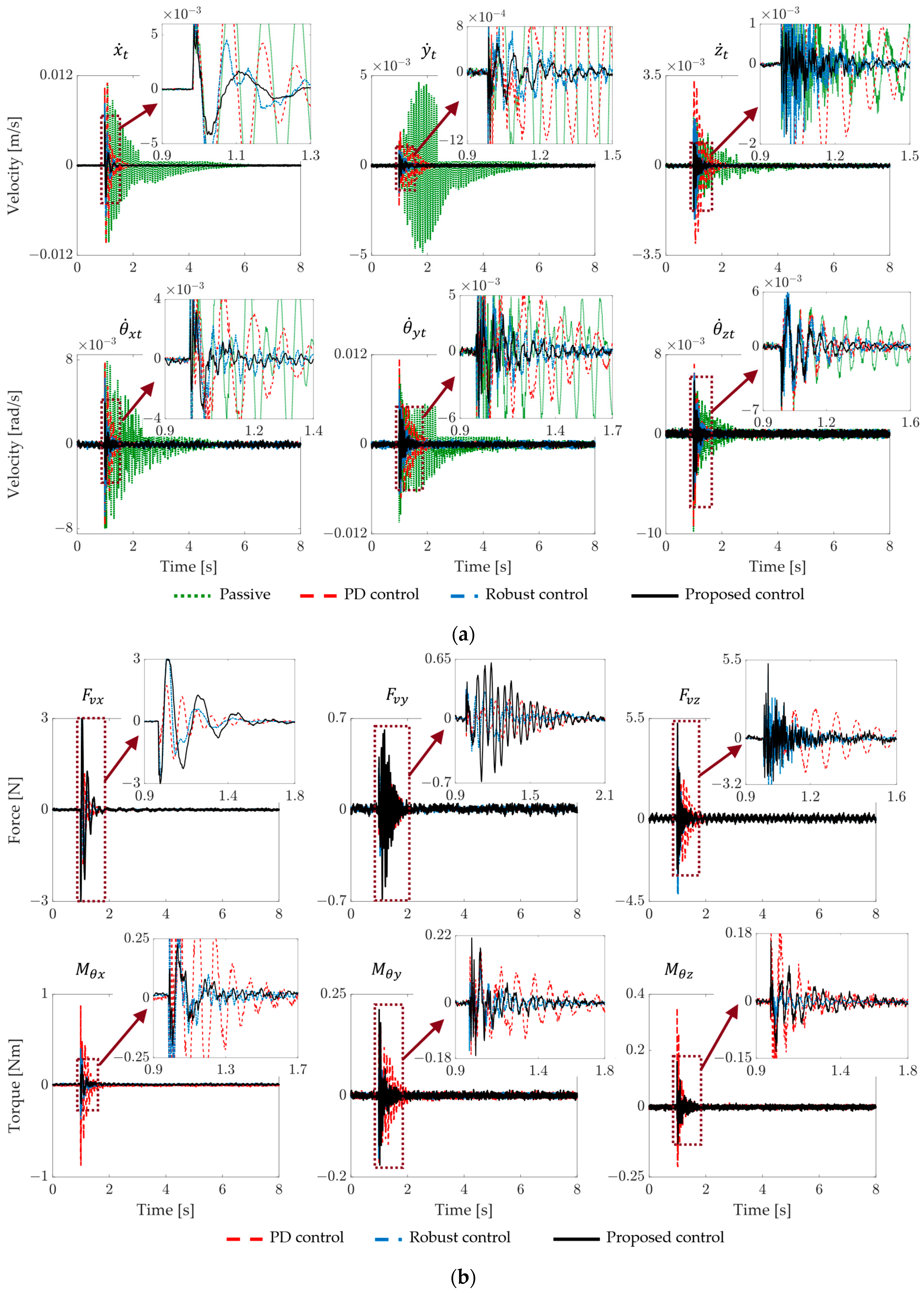
4.2. Experimental Results and Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Picher, M.; Mazzucco, S.; Blankenship, S.; Sharma, R. Vibrational and optical spectroscopies integrated with environmental transmission electron microscopy. Ultramicroscopy 2015, 150, 10–15. [Google Scholar] [CrossRef] [PubMed]
- Inman, D.J. Vibration with Control, 2nd ed.; John Wiley & Sons: New York, NY, USA, 2017; ISBN 978-1119108214. [Google Scholar]
- Preumont, A. Vibration Control of Active Structures, 4th ed.; Springer Nature Switzerland AG: Cham, Switzerland, 2018; Volume 246, ISBN 9789400720329. [Google Scholar]
- Landau, I.D.; Airimitoaie, T.; Castellanos-Silva, A.; Constantinescu, A. Adaptive and Robust Active Vibration Control: Methodology and Tests (Advances in Industrial Control); Springer Nature Switzerland AG: Cham, Switzerland, 2017. [Google Scholar]
- Sun, J.O.; Kim, K.J. Six-degree of freedom active pneumatic table based on time delay control technique. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2012, 226, 622–637. [Google Scholar] [CrossRef]
- Kim, M.H.; Kim, H.Y.; Kim, H.C.; Ahn, D.; Gweon, D.G. Design and control of a 6-dof active vibration isolation system using a halbach magnet array. IEEE/ASME Trans. Mechatron. 2016, 21, 2185–2196. [Google Scholar] [CrossRef]
- Wu, W.; Chen, X.; Shan, Y. Analysis and experiment of a vibration isolator using a novel magnetic spring with negative stiffness. J. Sound Vib. 2014, 333, 2958–2970. [Google Scholar] [CrossRef]
- Zhang, P. Advanced Industrial Control Technology; Elsevier: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Yang, Y.; Yang, B. Displacement sensor with nanometric resolution based on magnetoelectric effect. IEEE Sens. J. 2021, 21, 12084–12091. [Google Scholar] [CrossRef]
- Gao, J.X.; Cheng, L. Modelling of a high performance piezoelectric actuator assembly for active and passive vibration control. Smart Mater. Struct. 2004, 13, 384–392. [Google Scholar] [CrossRef]
- Claeyssen, F.; Lhermet, N.; Maillard, T. Magnetostrictive actuators compared to piezoelectric actuators. In European Workshop on Smart Structures in Engineering and Technology; SPIE: San Francisco, CA, USA, 2003; pp. 194–200. [Google Scholar]
- Jiang, D.; Li, J.; Li, X.; Deng, C.; Liu, P. Modeling identification and control of a 6-dof active vibration isolation system driving by voice coil motors with a halbach array magnet. J. Mech. Sci. Technol. 2020, 34, 617–630. [Google Scholar] [CrossRef]
- Chen, Y.D.; Fuh, C.C.; Tung, P.C. Application of voice coil motors in active dynamic vibration absorbers. IEEE Trans. Magn. 2005, 41, 1149–1154. [Google Scholar] [CrossRef]
- Kim, M.; Kim, H.; Gweon, D.G. Design and optimization of voice coil actuator for six degree of freedom active vibration isolation system using halbach magnet array. Rev. Sci. Instrum. 2012, 83, 105117. [Google Scholar] [CrossRef] [PubMed]
- Zuo, L.; Slotine, J.J.E. Robust vibration isolation via frequency-shaped sliding control and modal decomposition. J. Sound Vib. 2005, 285, 1123–1149. [Google Scholar] [CrossRef]
- Lee, D.H.; Kim, Y.B.; Chakir, S.; Huynh, T.; Park, H.C. Noninteracting control design for 6-dof active vibration isolation table with lmi approach. Appl. Sci. 2021, 11, 7693. [Google Scholar] [CrossRef]
- Kim, H.J.; Lee, D.H.; Park, H.C.; Kim, Y.B. Direct disturbance suppression system design for high precision fabrication tables. Trans. Korean Soc. Mech. Eng. A 2020, 44, 843–853. [Google Scholar] [CrossRef]
- Nguyen, T.-N.; Huynh, T.; Lee, D.-H.; Kim, Y.-B. Design of robust decoupling controller for 6-dof active vibration isolation system. J. Power Syst. Eng. 2024, 28, 21–32. [Google Scholar] [CrossRef]
- Chen, C.-T. Linear System Theory and Design: International, 4th ed.; Oxford University Press: Oxford, UK, 2013; ISBN 978-0199964543. [Google Scholar]
- Zhou, K.; Doyle, J. C Essentials of Robust Control; Prentice Hall: Upper Saddle River, NJ, USA, 1998; p. 425. [Google Scholar]
- Scherer, C.W. Theory of Robust Control; Delft University of Technology: Delft, The Netherlands, 2001. [Google Scholar]
- Dorato, P. On the inverse of linear dynamical systems. IEEE Trans. Syst. Sci. Cybern. 1969, 5, 43–48. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Unit | Value | |
|---|---|---|---|---|
| Mechanical components | m | Total mass of the top platform | kg | 9.085 |
| Moment of inertia of the top platform | kg·m2 | 0.1218, 0.1656, 0.2838 | ||
| Length, width, and height of the top platform | mm | 465, 366, 12 | ||
| Identified stiffness of the spring | N/m | 12683, 12683, 22526.2 | ||
| Identified damping ratio of the spring | Ns/m | 9.087, 9.087, 26.64 | ||
| to the top surface | mm | 1.5 | ||
| -directions | mm | 161.3, 161.3, 170.7, 170.7, 215.5, 215.5, 215.5, 215.5 | ||
| VCMs | -directions | mm | 146.7, 146.7, 156.3, 156.3, 146.6, 146.6, 146.6, 146.6 | |
| -directions | mm | 69.8, 69.8, 199.9, 199.9, 13.4, 13.4 | ||
| -directions | mm | 145.8, 155.2, 0, 0, 13.4, 13.4 | ||
| Geophones | -directions | mm | 151.3, 151.3, 160.7, 160.7, 112.9, 112.9, 112.9, 112.9 20.9, 20.9, 20.9, 20.9, | |
| -directions | mm | 70.3, 70.3, 137.4, 137.4, 11.3, 11.3 | ||
| -directions | mm | 109.3, 118.7, 53.1, 52.8, 11.3, 11.3 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.-N.; Lee, D.-H.; Huynh, T.; Kim, Y.-B. A High-Precision Active Vibration Isolation Control System: Experimental Study. Appl. Sci. 2024, 14, 7966. https://doi.org/10.3390/app14177966
Nguyen T-N, Lee D-H, Huynh T, Kim Y-B. A High-Precision Active Vibration Isolation Control System: Experimental Study. Applied Sciences. 2024; 14(17):7966. https://doi.org/10.3390/app14177966
Chicago/Turabian StyleNguyen, Tan-Ngoc, Dong-Hun Lee, Thinh Huynh, and Young-Bok Kim. 2024. "A High-Precision Active Vibration Isolation Control System: Experimental Study" Applied Sciences 14, no. 17: 7966. https://doi.org/10.3390/app14177966
APA StyleNguyen, T.-N., Lee, D.-H., Huynh, T., & Kim, Y.-B. (2024). A High-Precision Active Vibration Isolation Control System: Experimental Study. Applied Sciences, 14(17), 7966. https://doi.org/10.3390/app14177966