
Trajectory Tracking via Interconnection and Damping Assignment Passivity-Based Control for a Permanent Magnet Synchronous Motor

 , , , and
, , , and
Abstract
:1. Introduction
2. PMSM Model
- The variables , and are available for measurement.
- The parameters , , , and J are known.
3. Controller Design
3.1. IDA-PBC Methodology
3.2. Tracking via IDA-PBC
Trajectory Tracking Strategy
- The equilibrium is assignable to the error system of (3).
- There exists a structure (15) that satisfies the PDE.
3.3. Controller Design and Stability Analysis
3.4. Trajectory Tracking of Speed, Position, and Torque
4. Simulation and Experimental Results
4.1. Simulation Results
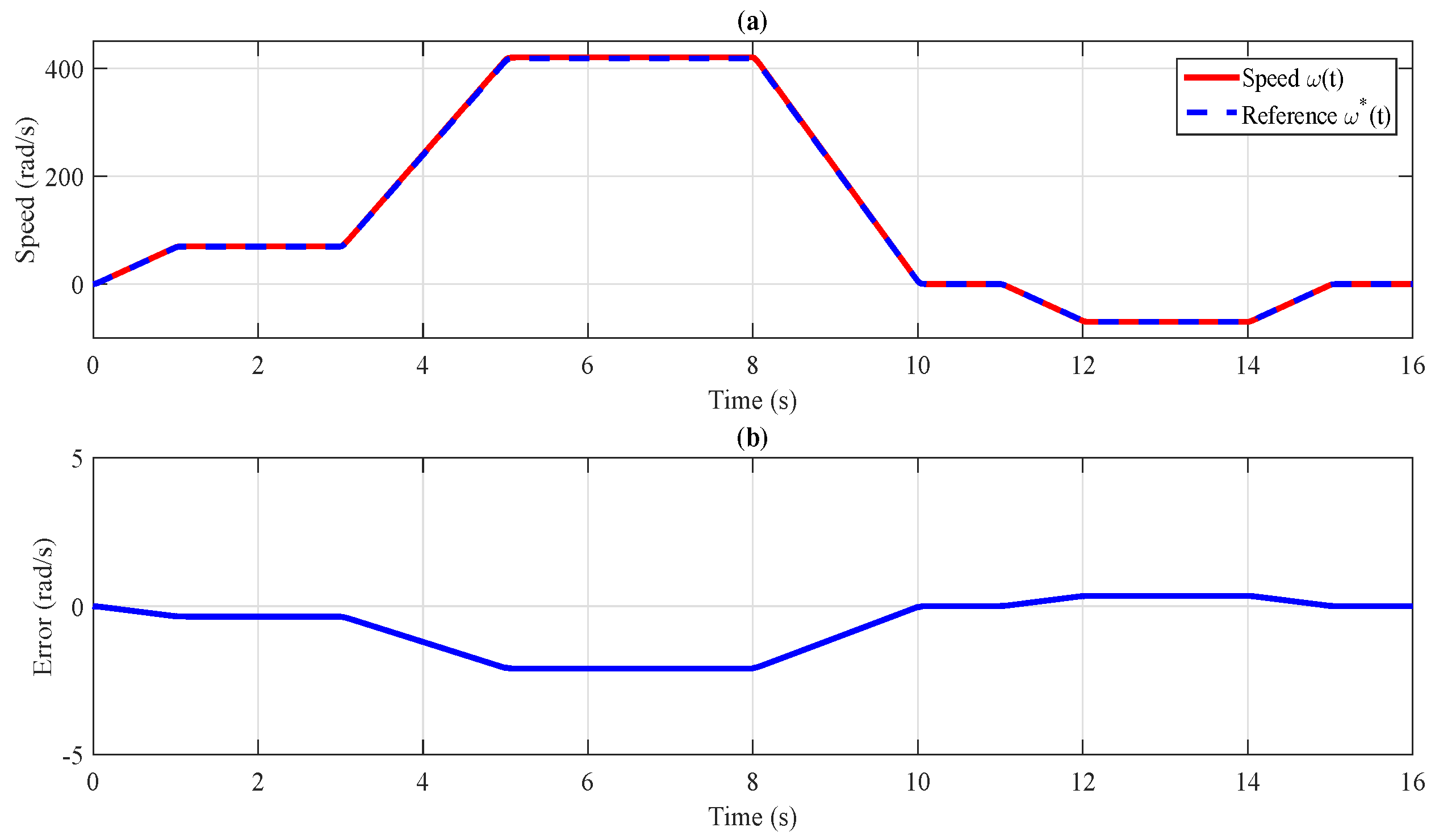
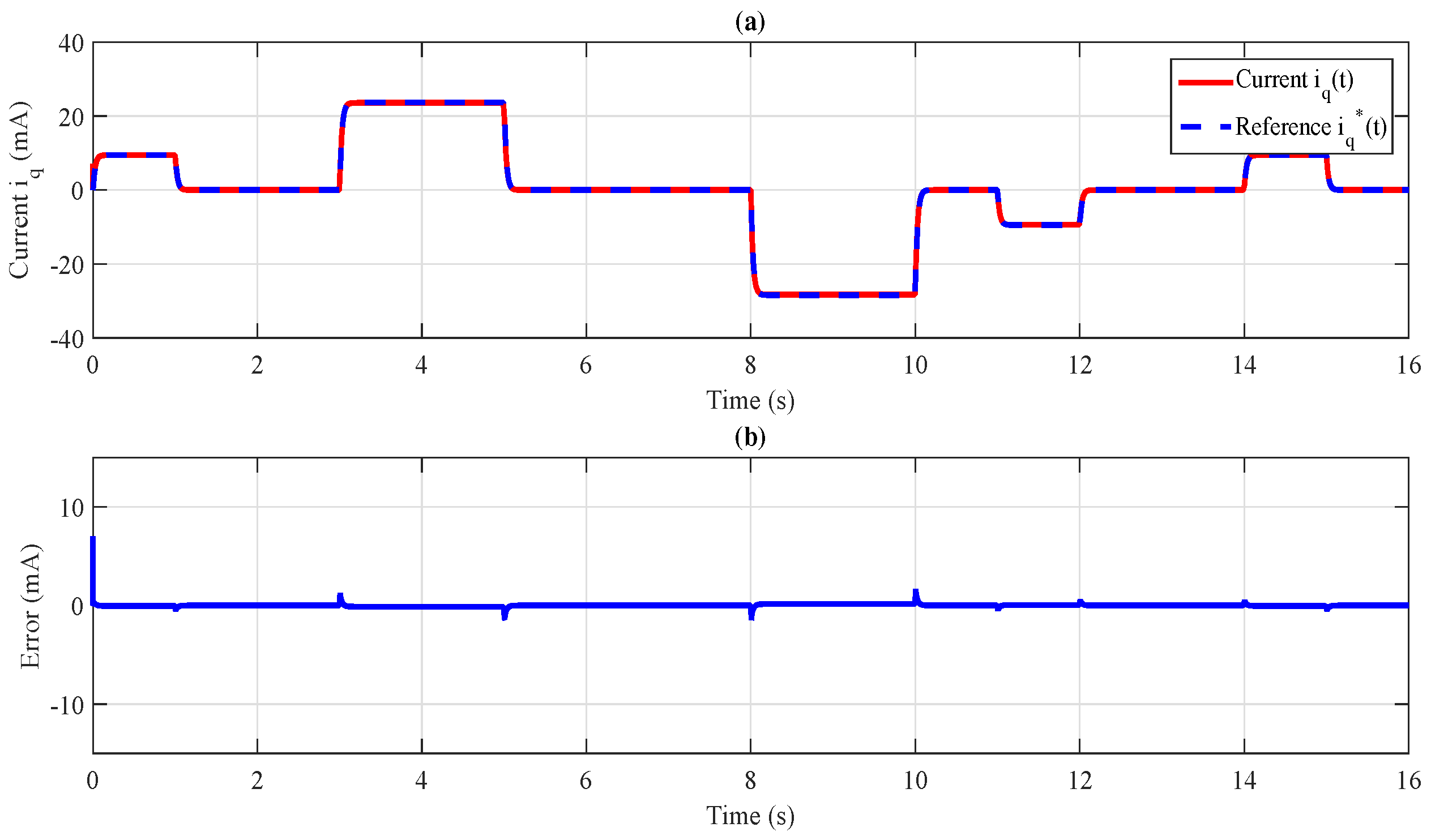
4.1.1. Speed Trajectory Tracking
4.1.2. Position Trajectory Tracking
4.1.3. Torque Trajectory Tracking
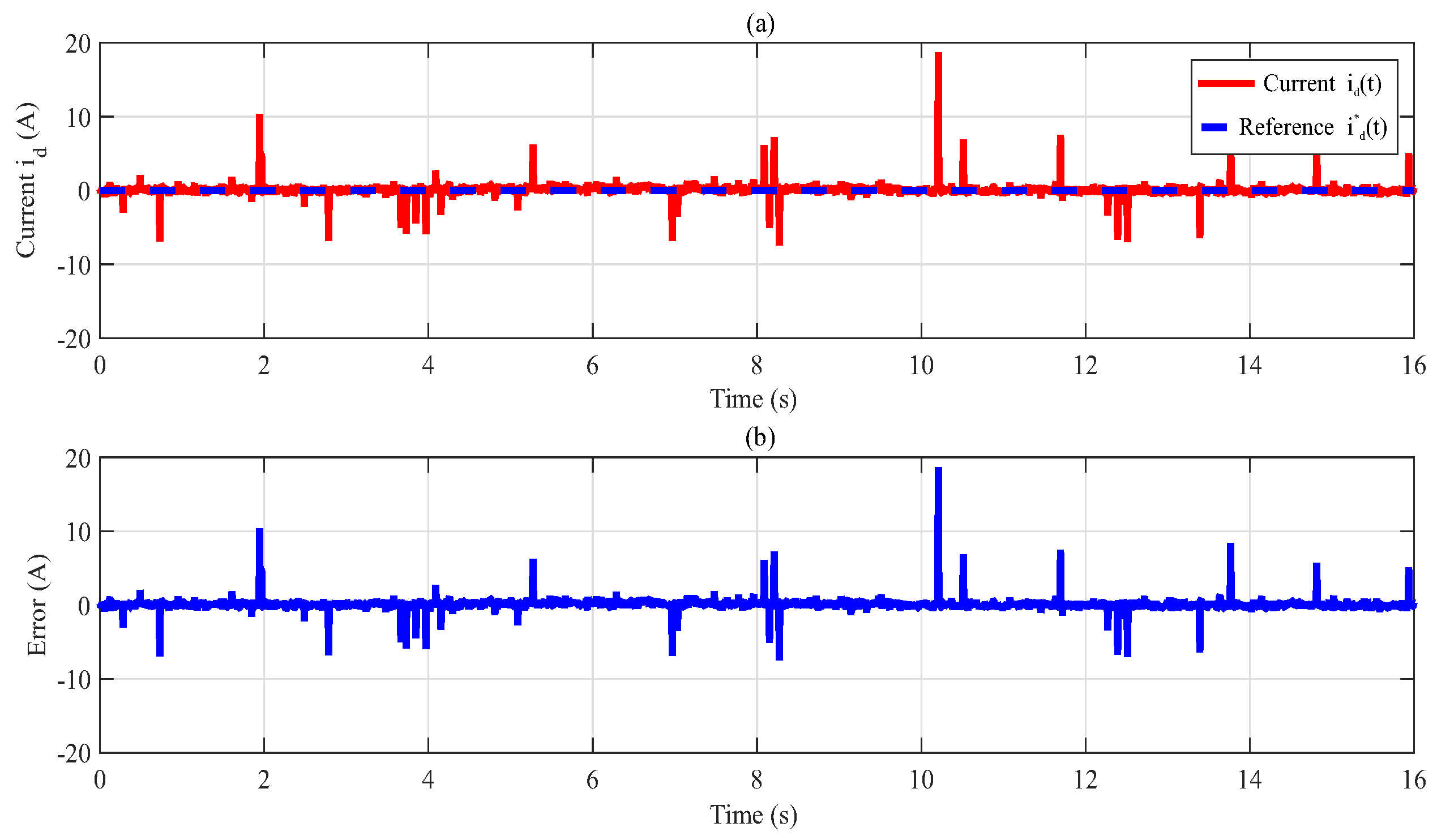
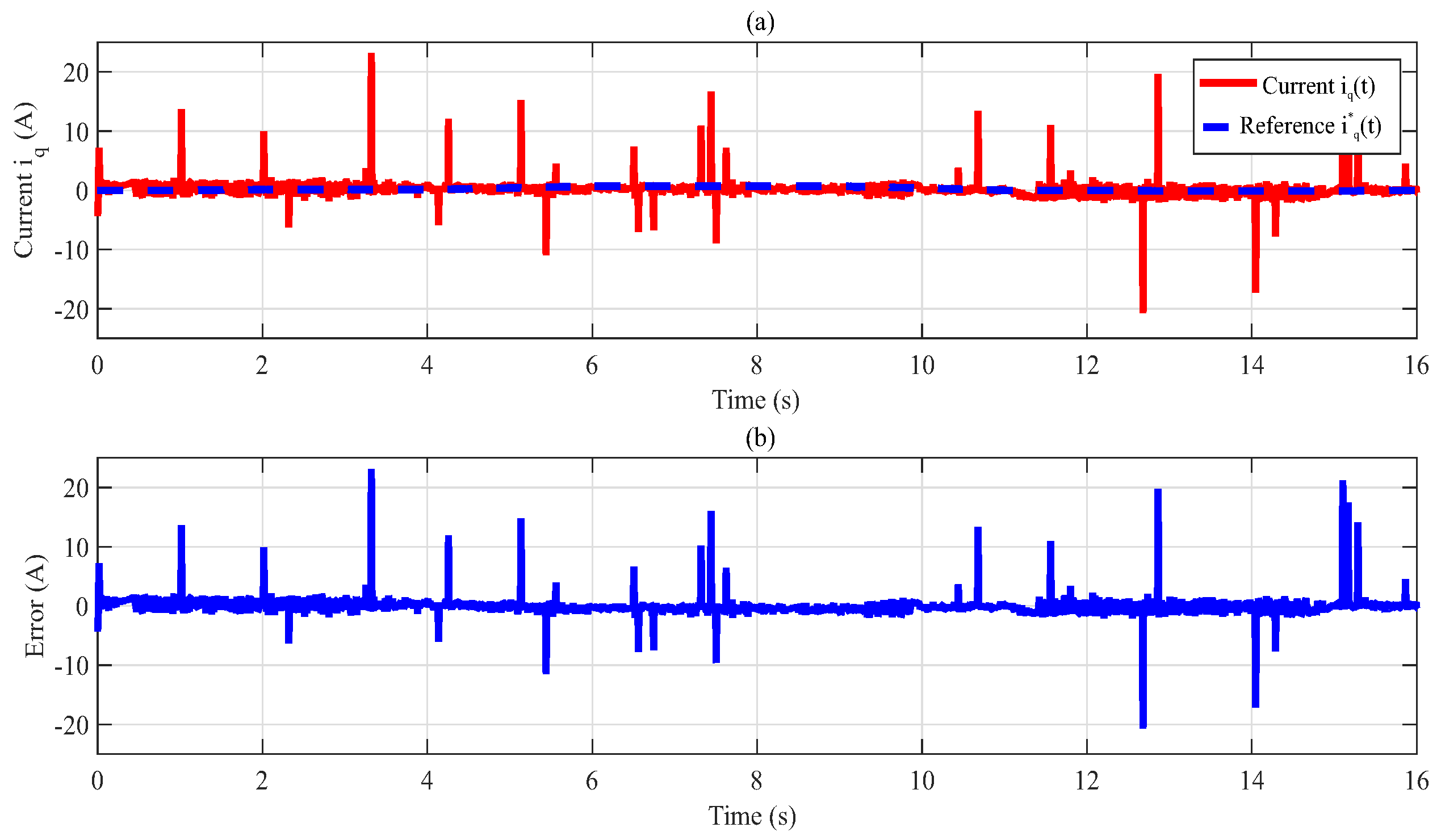
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bose, B. Modern Power Electronics and AC Drives, Eastern Economy Ed.; Prentice Hall PTR: Hoboken, NJ, USA, 2002. [Google Scholar]
- Naouar, M.W.; Naassani, A.; Monmasson, E.; Slama-Belkhodja, I. FPGA-Based Speed Control of Synchronous Machine using a P-PI Controller. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–13 July 2006; Volume 2, pp. 1527–1532. [Google Scholar] [CrossRef]
- Li, W.; Lin, W.; Liu, P.X. Speed Tracking Control Based on Backstepping of Permanent Magnet Synchronous Motor with Uncertainty. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 3657–3661. [Google Scholar] [CrossRef]
- Solsona, J.; Valla, M.I.; Muravchik, C. Nonlinear control of a permanent magnet synchronous motor with disturbance torque estimation. IEEE Trans. Energy Convers. 2000, 15, 163–168. [Google Scholar] [CrossRef] [PubMed]
- Rasmussen, H.; Vadstrup, P.; Borsting, H. Sensorless field oriented control of a PM motor including zero speed. In Proceedings of the IEEE International Electric Machines and Drives Conference, 2003. IEMDC’03, Madison, WI, USA, 1–4 June 2003; Volume 2, pp. 1224–1228. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, J.G.; Guo, Y.G. A survey of direct torque control schemes for permanent magnet synchronous motor drives. In Proceedings of the 2007 Australasian Universities Power Engineering Conference, Perth, WA, Australia, 9–12 December 2007; pp. 1–5. [Google Scholar] [CrossRef]
- Khanchoul, M.; Hilairet, M.; Normand-Cyrot, D. A passivity-based controller under low sampling for speed control of PMSM. Control Eng. Pract. 2014, 26, 20–27. [Google Scholar] [CrossRef]
- Peng, J.; Yao, M. Overview of predictive control technology for permanent magnet synchronous motor systems. Appl. Sci. 2023, 13, 6255. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, C. Speed Control of PMSM Based on Fuzzy Active Disturbance Rejection Control under Small Disturbances. Appl. Sci. 2023, 13, 10775. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, H.; Wang, H.; Shao, K.; Wang, G.; Yazdani, A. Continuous adaptive fast terminal sliding mode-based speed regulation control of pmsm drive via improved super-twisting observer. IEEE Trans. Ind. Electron. 2023, 71, 5105–5115. [Google Scholar] [CrossRef]
- Belkhier, Y.; Achour, A.; Bures, M.; Ullah, N.; Bajaj, M.; Zawbaa, H.M.; Kamel, S. Interconnection and damping assignment passivity-based non-linear observer control for efficiency maximization of permanent magnet synchronous motor. Energy Rep. 2022, 8, 1350–1361. [Google Scholar] [CrossRef]
- Belkhier, Y.; Shaw, R.N.; Bures, M.; Islam, M.R.; Bajaj, M.; Albalawi, F.; Alqurashi, A.; Ghoneim, S.S. Robust interconnection and damping assignment energy-based control for a permanent magnet synchronous motor using high order sliding mode approach and nonlinear observer. Energy Rep. 2022, 8, 1731–1740. [Google Scholar] [CrossRef]
- Ortega, R.; Spong, M.W. Adaptive motion control of rigid robots: A tutorial. In Proceedings of the 27th IEEE Conference on Decision and Control, Austin, TX, USA, 7–9 December 1988; Volume 2, pp. 1575–1584. [Google Scholar] [CrossRef]
- Ortega, R.; Liu, Z.; Su, H. Control via interconnection and damping assignment of linear time-invariant systems: A tutorial. Int. J. Control 2012, 85, 603–611. [Google Scholar] [CrossRef]
- Ortega, R.; van der Schaft, A.; Maschke, B.; Escobar, G. Interconnection and damping assignment passivity-based control of port-controlled Hamiltonian systems. Automatica 2002, 38, 585–596. [Google Scholar] [CrossRef]
- Gomez-Estern, F.; der Schaft, A.V. Physical Damping in IDA-PBC Controlled Underactuated Mechanical Systems. Eur. J. Control 2004, 10, 451–468. [Google Scholar] [CrossRef]
- Chang, D.E. Generalization of the IDA-PBC method for stabilization of mechanical systems. In Proceedings of the 18th Mediterranean Conference on Control and Automation, MED’10, Marrakech, Morocco, 23–25 June 2010; pp. 226–230. [Google Scholar]
- Rodriguez, H.; Ortega, R.; Escobar, G. A robustly stable output feedback saturated controller for the Boost DC-to-DC converter. In Proceedings of the 38th IEEE Conference on Decision and Control (Cat. No.99CH36304), Phoenix, AZ, USA, 7–10 December 1999; Volume 3, pp. 2100–2105. [Google Scholar]
- Galaz, M.; Ortega, R.; Bazanella, A.S.; Stankovic, A.M. An energy-shaping approach to the design of excitation control of synchronous generators. Automatica 2003, 39, 111–119. [Google Scholar] [CrossRef]
- Batlle, C.; Doria-Cerezo, A.; Ortega, R. Power flow control of a doubly-fed induction machine coupled to a flywheel. In Proceedings of the 2004 IEEE International Conference on Control Applications, Taipei, Taiwan, 2–4 September 2004; Volume 2, pp. 1645–1650. [Google Scholar]
- Petrovic, V.; Ortega, R.; Stankovic, A.M. Interconnection and damping assignment approach to control of PM synchronous motors. IEEE Trans. Control Syst. Technol. 2001, 9, 811–820. [Google Scholar] [CrossRef]
- Ortega, R.; Garcia-Canseco, E. Interconnection and Damping Assignment Passivity-Based Control: A Survey. Eur. J. Control 2004, 10, 432–450. [Google Scholar] [CrossRef]
- Fujimoto, K.; Sakurama, K.; Sugie, T. Trajectory tracking control of port-controlled Hamiltonian systems via generalized canonical transformations. Automatica 2003, 39, 2059–2069. [Google Scholar] [CrossRef]
- Fujimoto, K.; Sugie, T. Canonical transformation and stabilization of generalized Hamiltonian systems. Syst. Control Lett. 2001, 42, 217–227. [Google Scholar] [CrossRef]
- Borja-Rosales, P. Passivity-Based Control Using Coordinates Change. Master’s Thesis, Universidad Nacional Autonoma de Mexico, Mexico, 2013. (In Spanish). [Google Scholar]
- Chiasson, J. Modeling and High Performance Control of Electric Machines; IEEE Press Series on Power Engineering; Wiley: Hoboken, NJ, USA, 2005. [Google Scholar]
- Mujica, H.; Espinosa-Pérez, G. Nonlinear Passivity-Based Control of Induction Motors for High Dynamic Performance. Rev. Iberoam. Autom. Inform. Ind. 2014, 11, 32–43. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Nominal Voltage | 24 V |
| Nominal speed | 4000 rpm |
| Stator resistance () | 0.7 Ω |
| Stator inductance () | 0.6 mH |
| Magnetic flux linkage () | 0.0355 V/(rad/s) |
| Rotor inertia (J) | 4.8035 Nms2 |
| Pole pairs () | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martinez-Padron, D.S.; de la Rosa-Mendoza, S.J.; Alvarez-Salas, R.; Espinosa-Perez, G.; Gonzalez-Garcia, M.A. Trajectory Tracking via Interconnection and Damping Assignment Passivity-Based Control for a Permanent Magnet Synchronous Motor. Appl. Sci. 2024, 14, 7977. https://doi.org/10.3390/app14177977
Martinez-Padron DS, de la Rosa-Mendoza SJ, Alvarez-Salas R, Espinosa-Perez G, Gonzalez-Garcia MA. Trajectory Tracking via Interconnection and Damping Assignment Passivity-Based Control for a Permanent Magnet Synchronous Motor. Applied Sciences. 2024; 14(17):7977. https://doi.org/10.3390/app14177977
Chicago/Turabian StyleMartinez-Padron, Daniel Sting, San Jose de la Rosa-Mendoza, Ricardo Alvarez-Salas, Gerardo Espinosa-Perez, and Mario Arturo Gonzalez-Garcia. 2024. "Trajectory Tracking via Interconnection and Damping Assignment Passivity-Based Control for a Permanent Magnet Synchronous Motor" Applied Sciences 14, no. 17: 7977. https://doi.org/10.3390/app14177977