


Simulation Analysis and Experimental Investigation on the Fluid–Structure Interaction Vibration Characteristics of Aircraft Liquid-Filled Pipelines under the Superimposed Impact of External Random Vibration and Internal Pulsating Pressure

Abstract
1. Introduction
2. Theoretical Foundation
2.1. Analysis Method
2.2. Fluid Governing Equation
2.3. Solid Governing Equation
2.4. Fluid–Structure Interaction Governing Equation
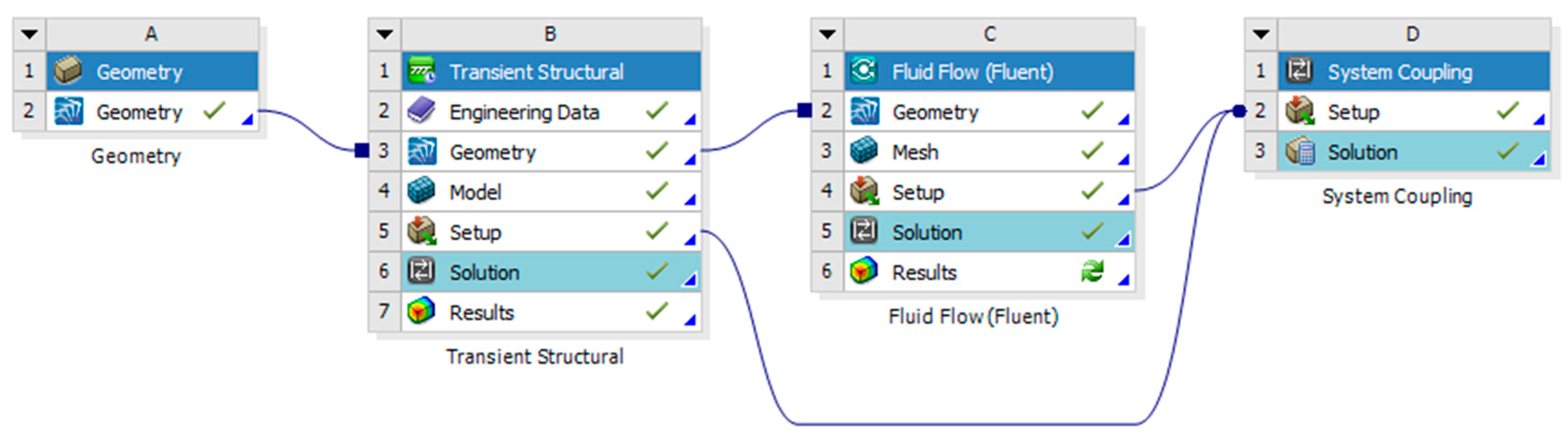
2.5. Fluid–Structure Interaction Solution Method
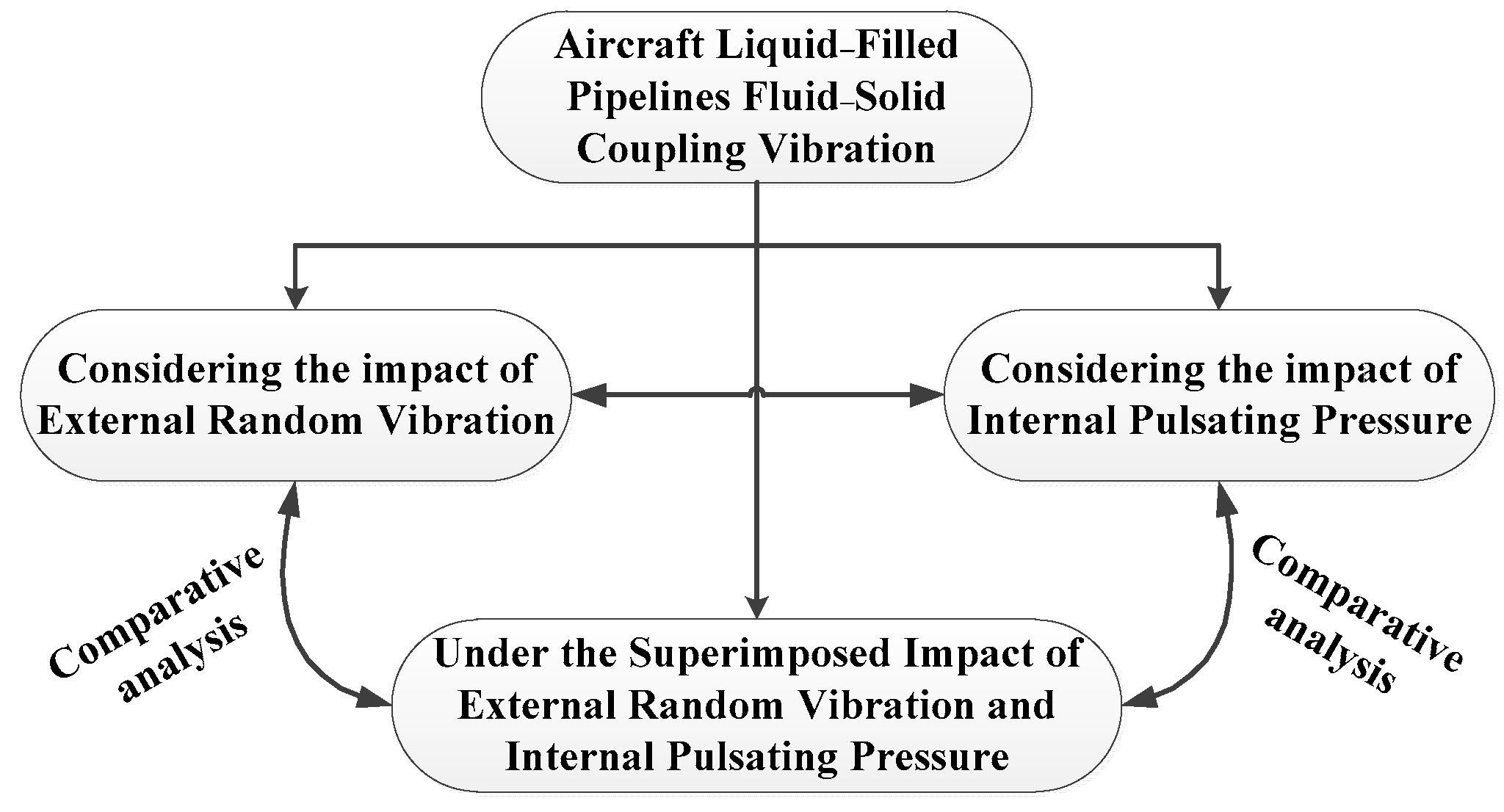
3. Research Strategy
4. Simulation Analysis of Aircraft Liquid-Filled Pipelines
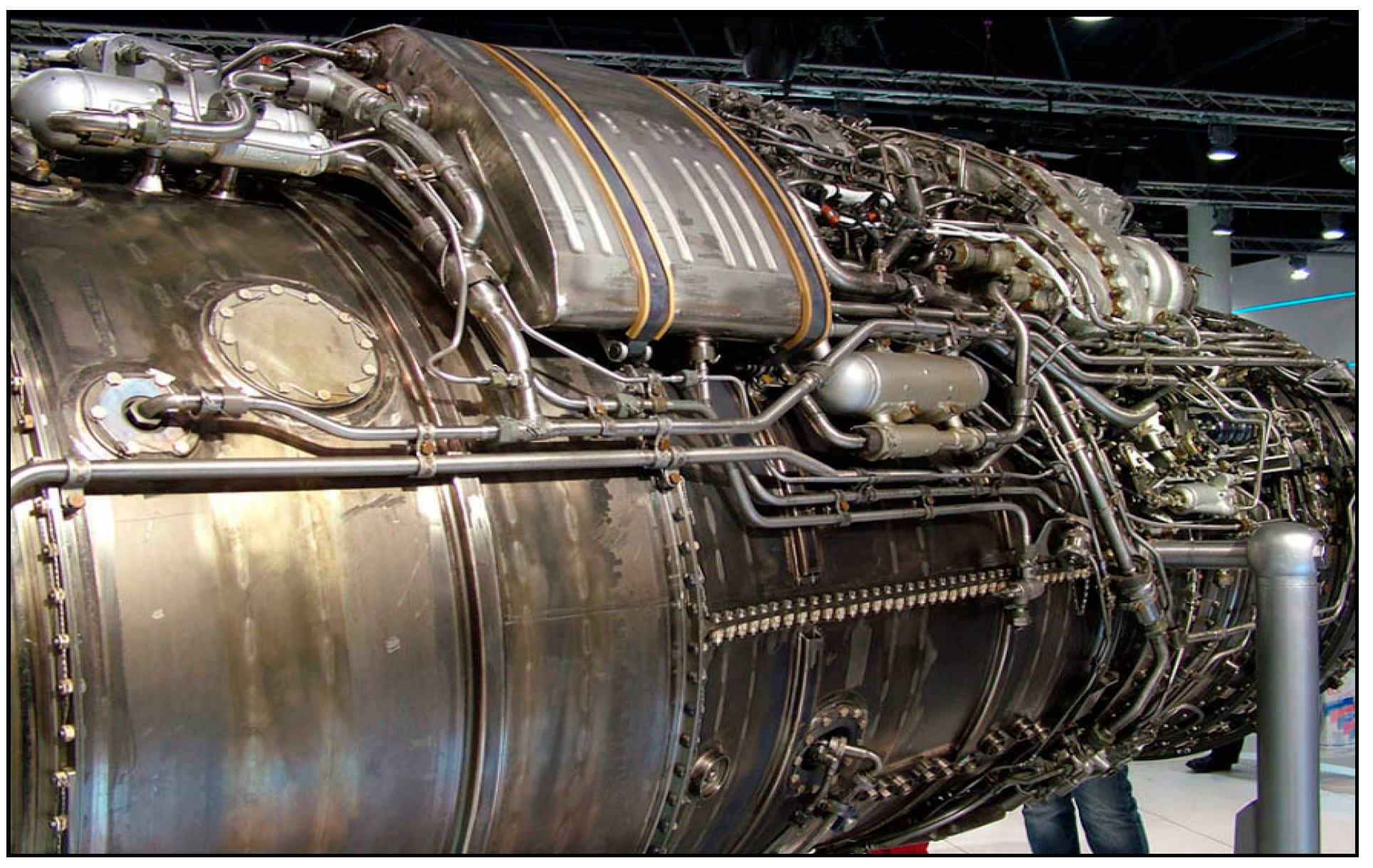
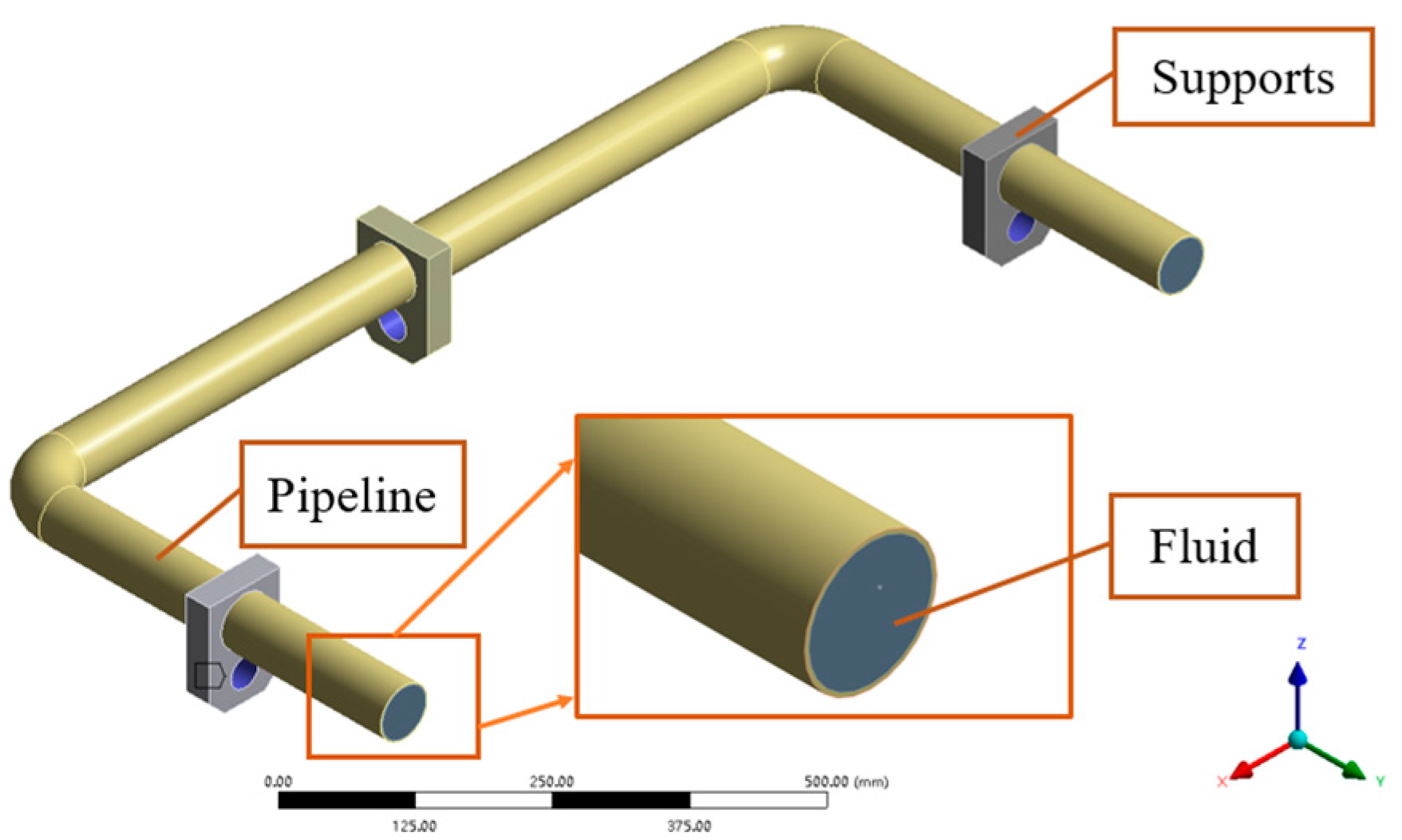
4.1. Physical Model
4.2. Finite Element Modeling
4.2.1. Model Establishment of Pipeline
4.2.2. Grouping of Simulation Analysis
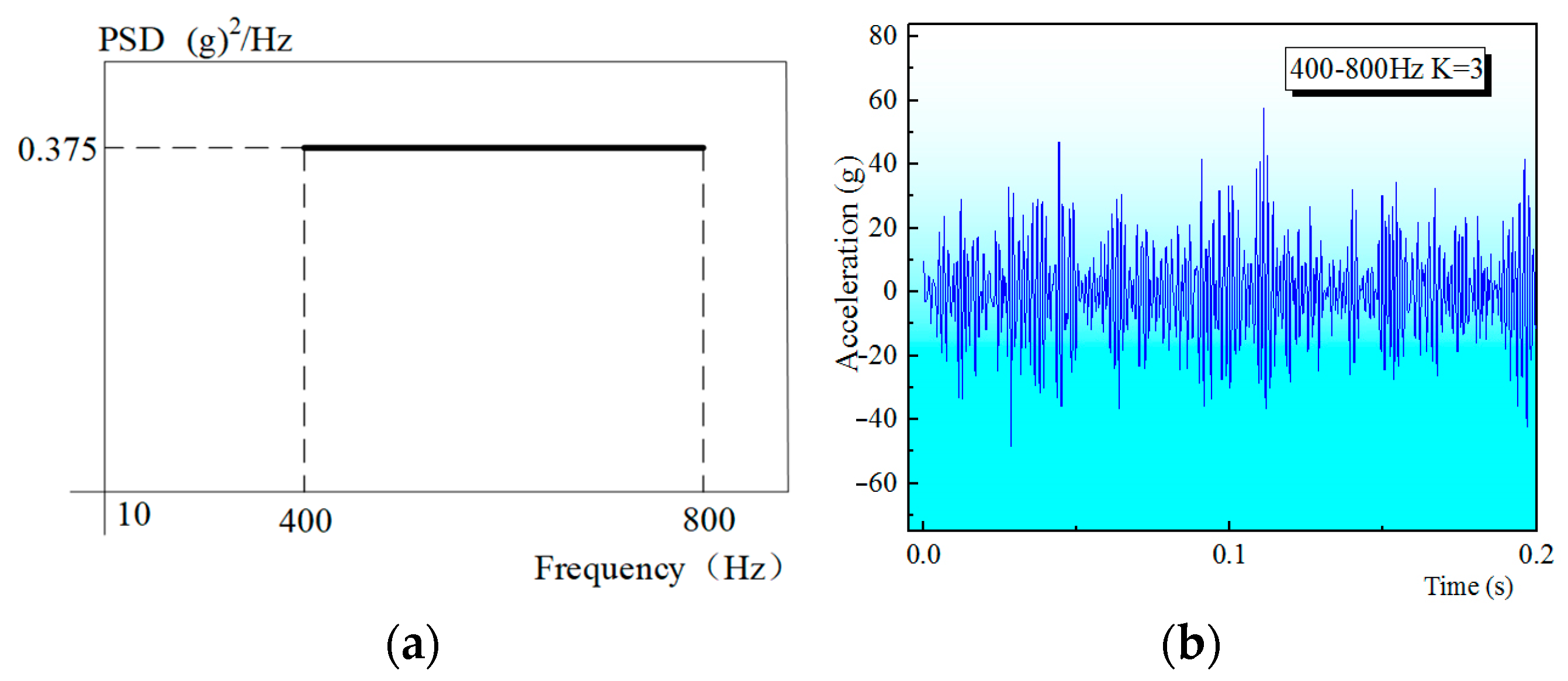
4.2.3. Load Generation
Random Load Extraction
Generation of Fluid Pulsation Pressure in Pipe
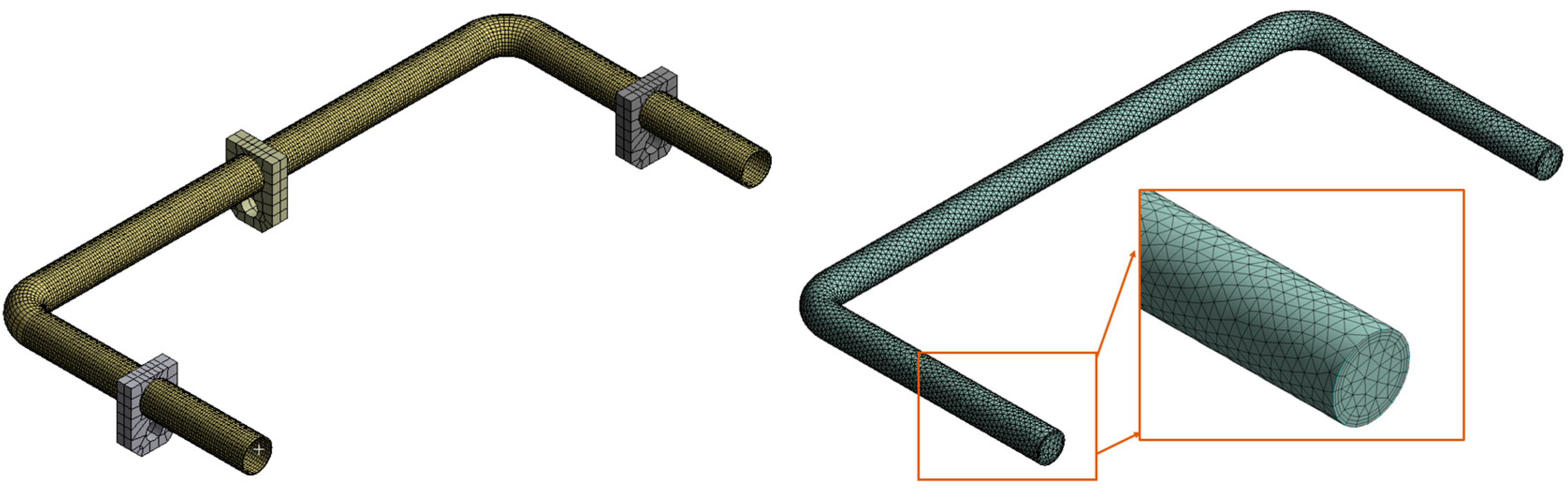
4.3. Mesh Generation
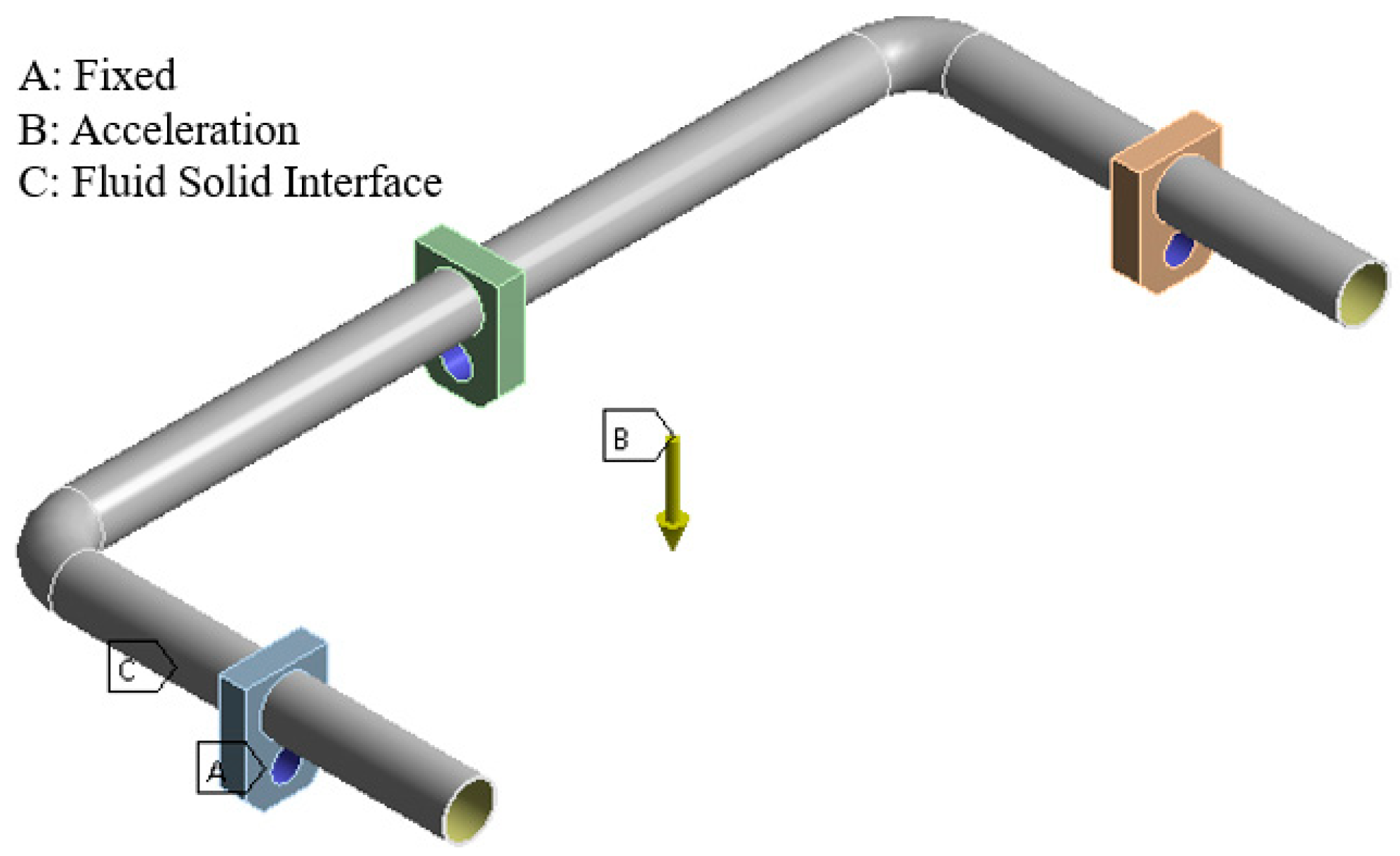
4.4. Boundary Conditions and Parameters Setting
4.5. Simulation Results and Comparative Analysis
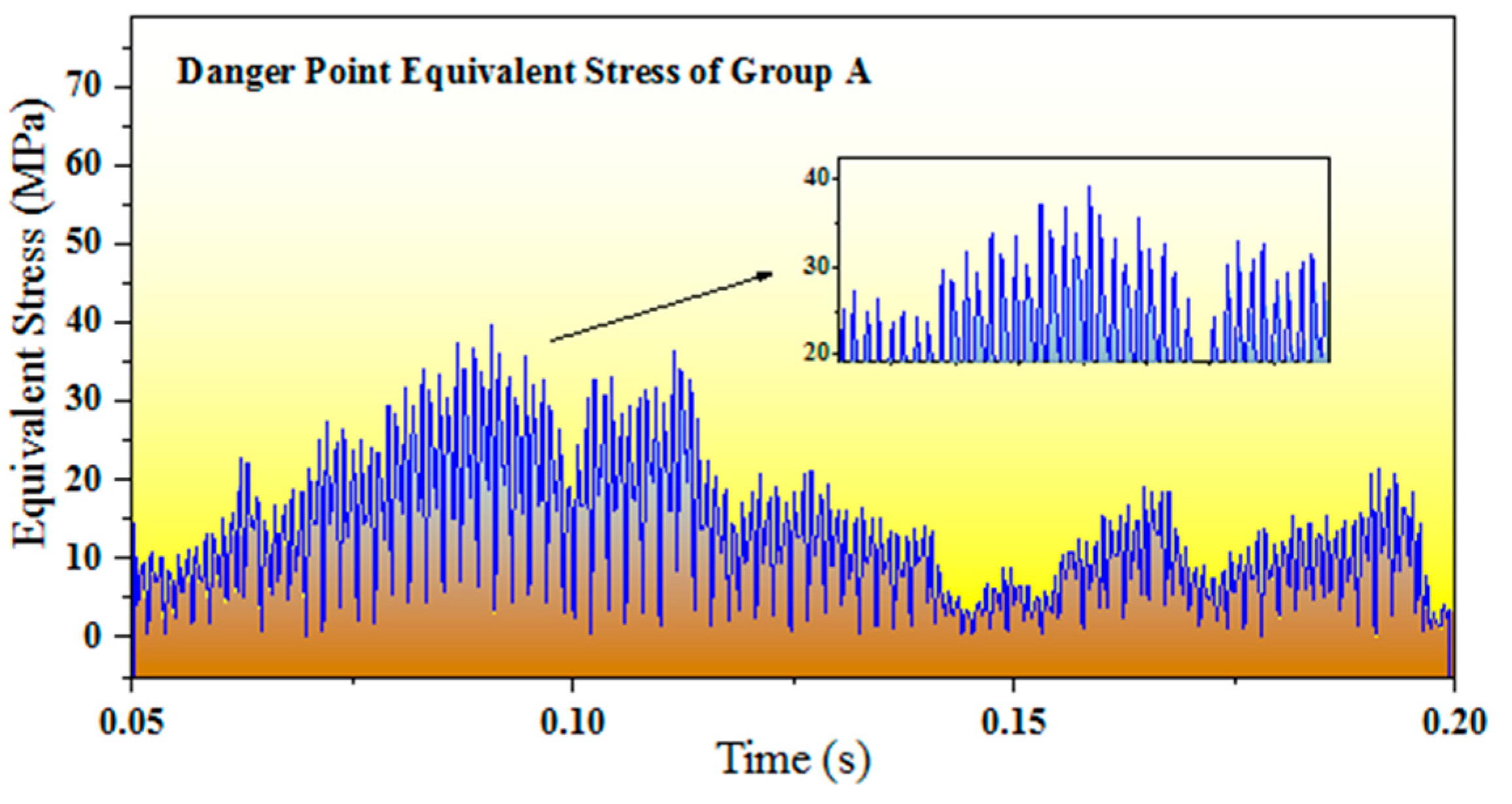
4.5.1. Group A Simulation Results
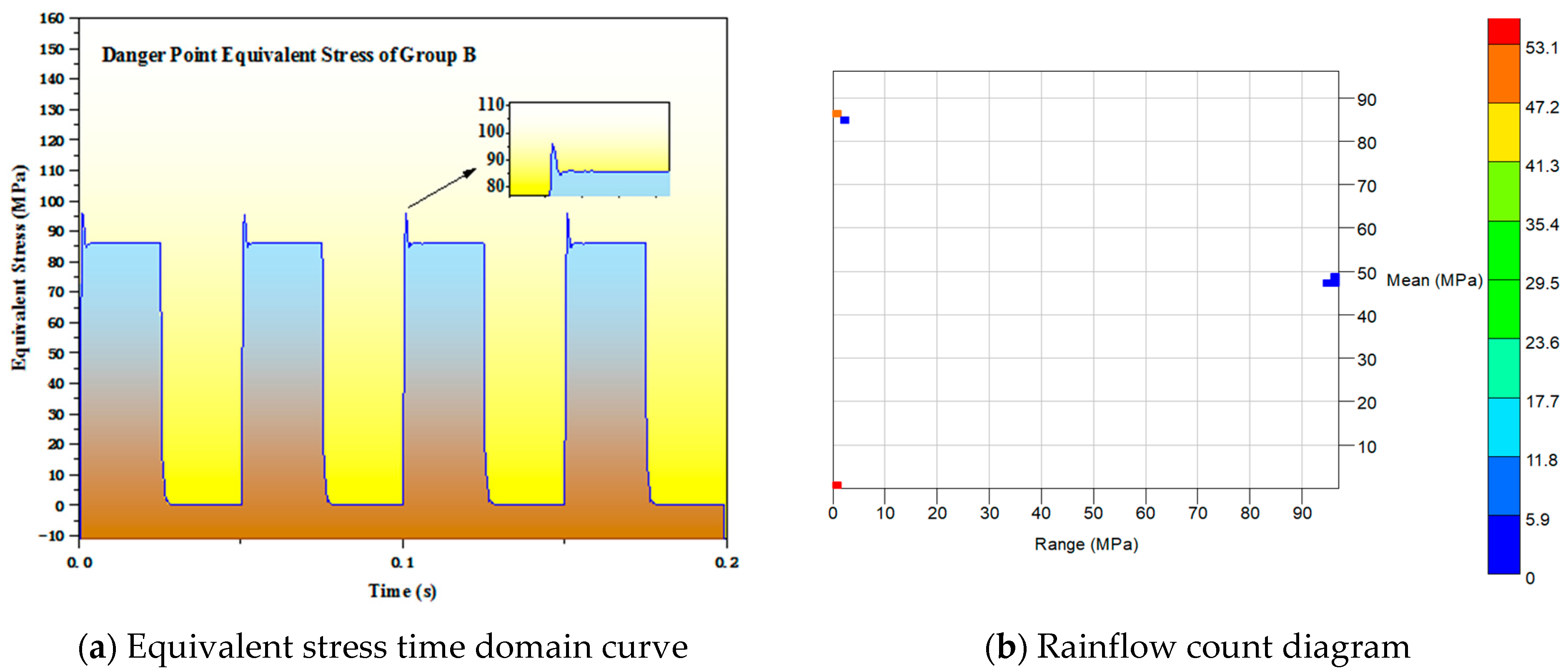
4.5.2. Group B Simulation Results
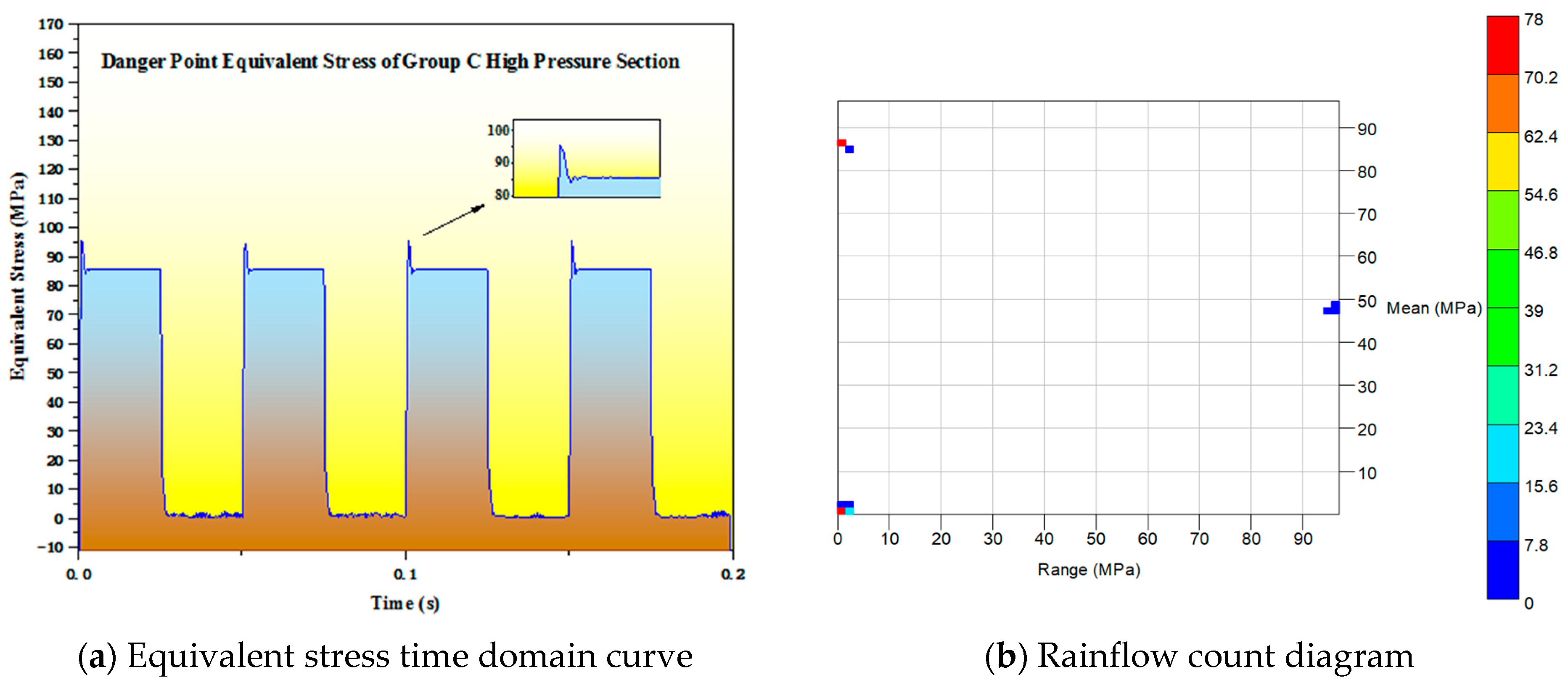
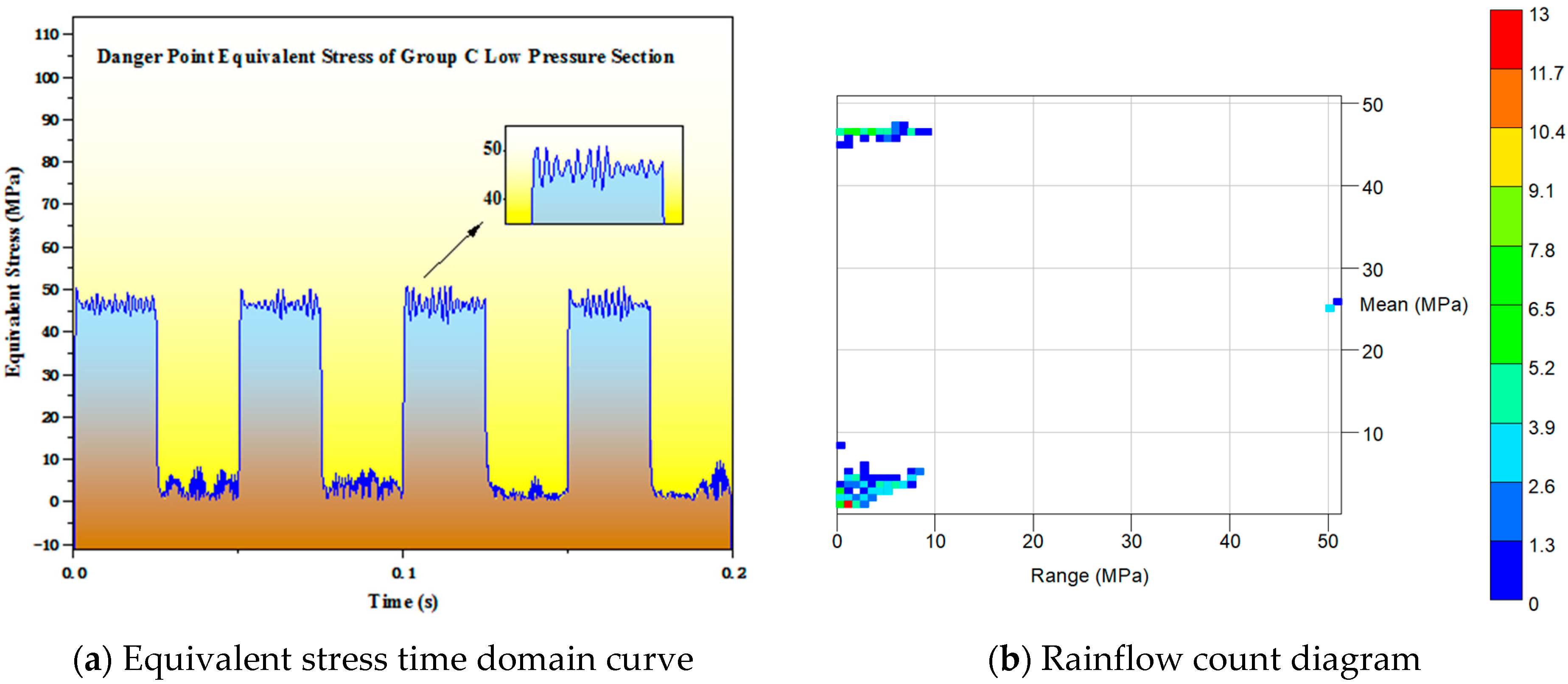
4.5.3. Group C Simulation Results
4.5.4. Comparison and Analysis of Simulation Results between Group A and Group B
4.5.5. Comparison and Analysis of Simulation Results between Group A and Group C
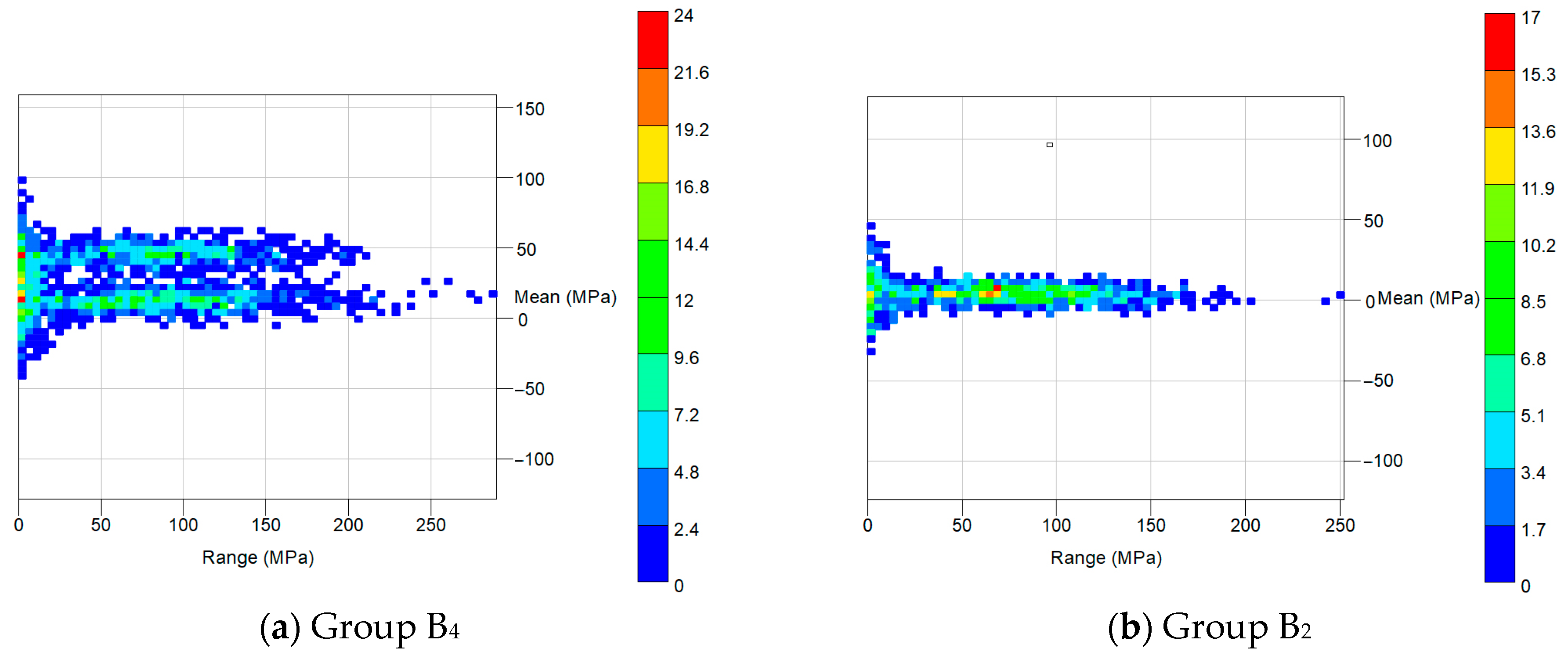
4.5.6. Comparison and Analysis of Simulation Results between Group B and Group C
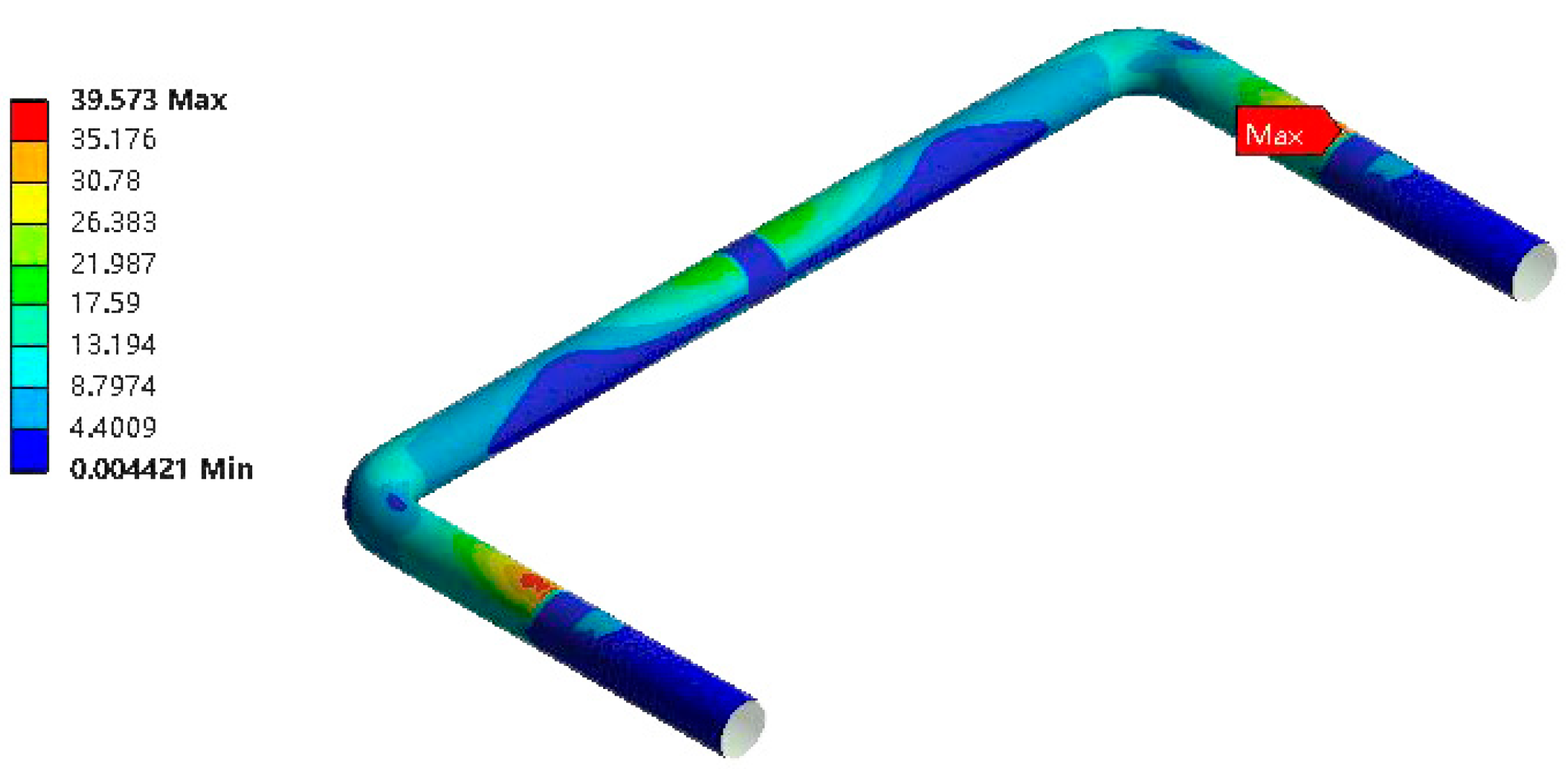
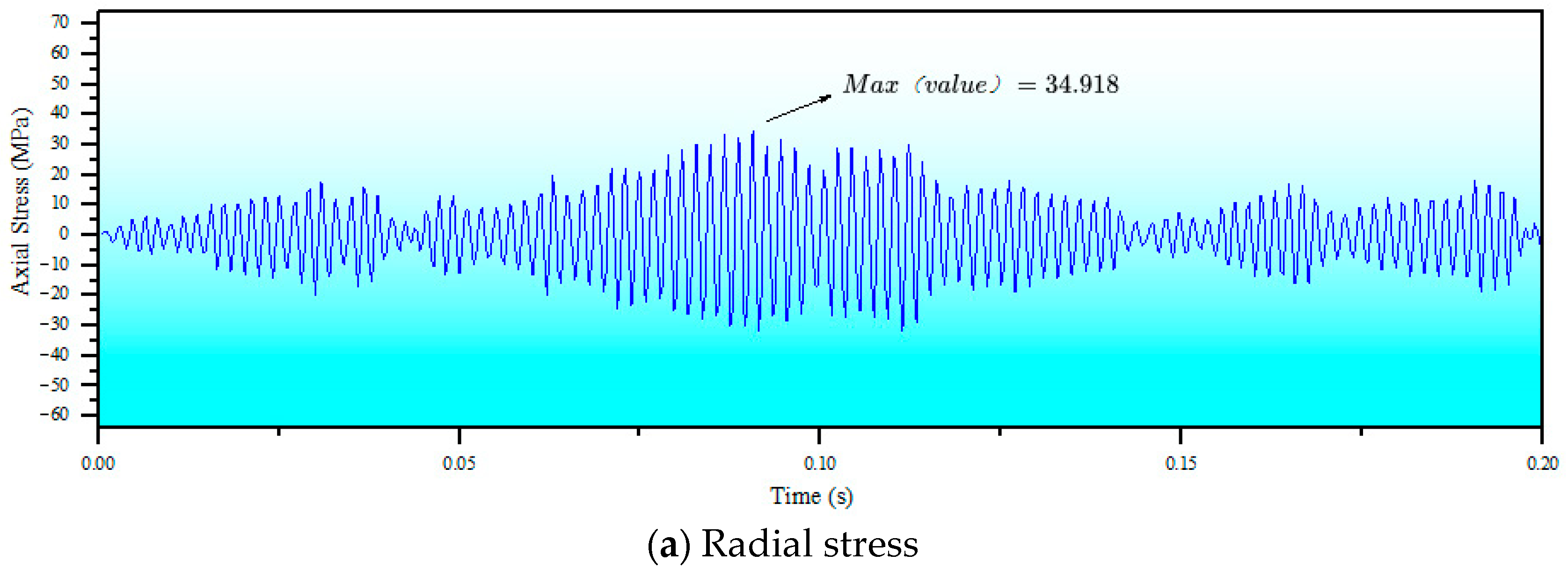
- Under external random vibration, the stress danger point of the pipeline is located at the support contact pipe wall at both ends; furthermore, the radial stress can be ignored, and the axial stress is the main stress generated by the pipeline vibration.
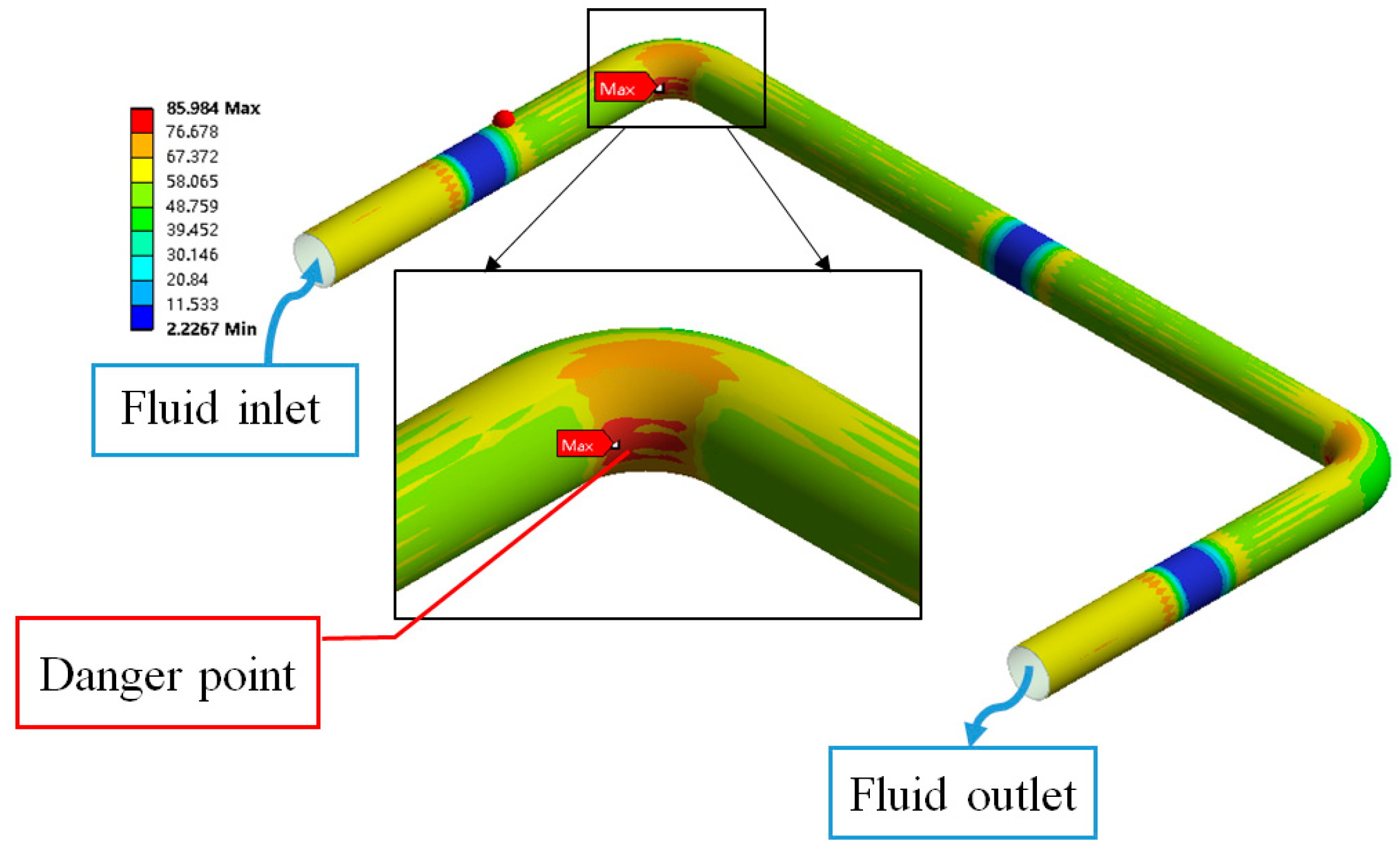
- Under the effect of internal fluid pulsation pressure, the stress danger point of the pipeline is at the inner corner of the pipeline. The radial stress can also be ignored, and the circumferential stress is the main stress generated by the pipeline vibration.
5. Experimental Investigation on Aircraft Liquid-Filled Pipelines
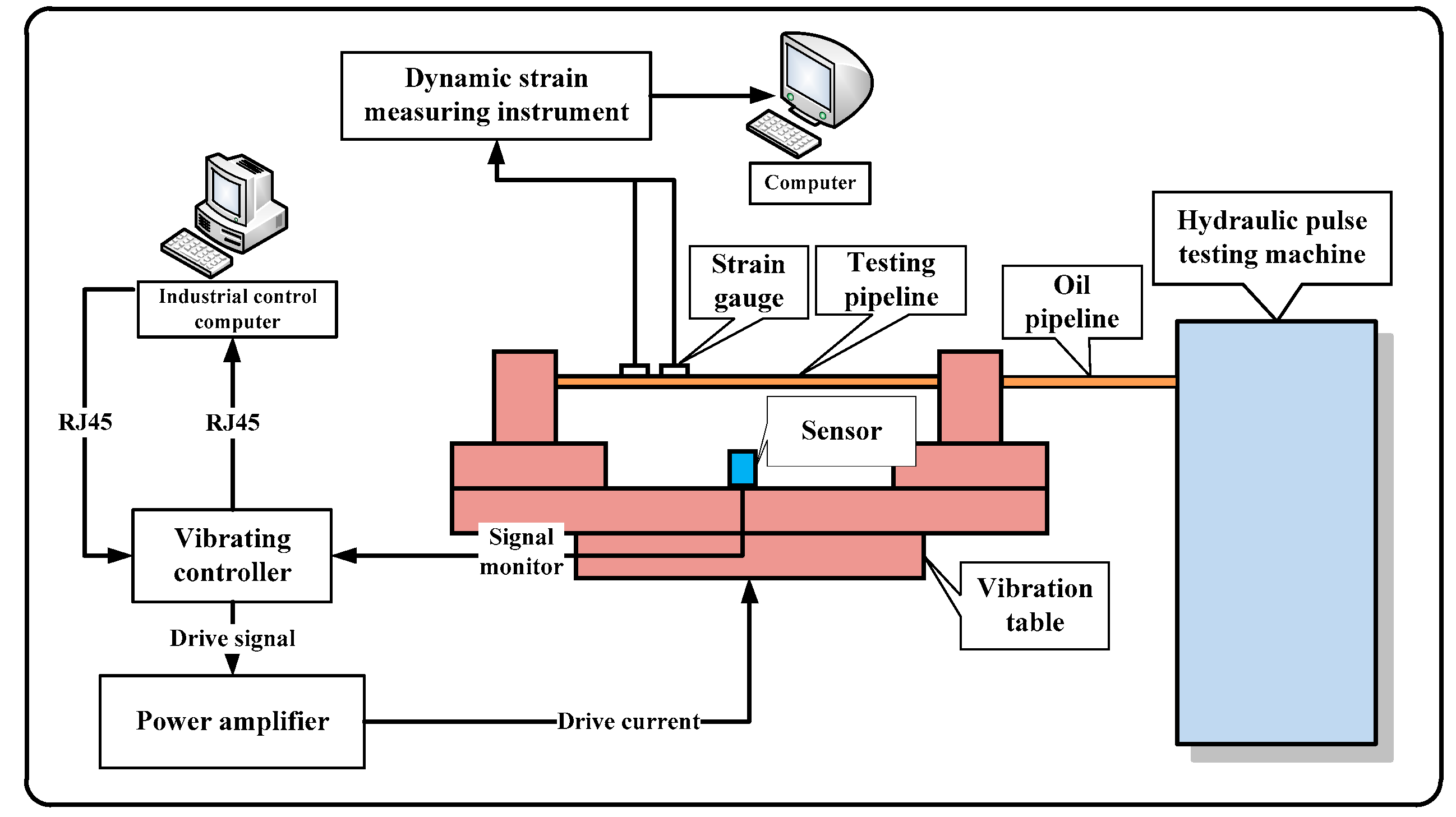
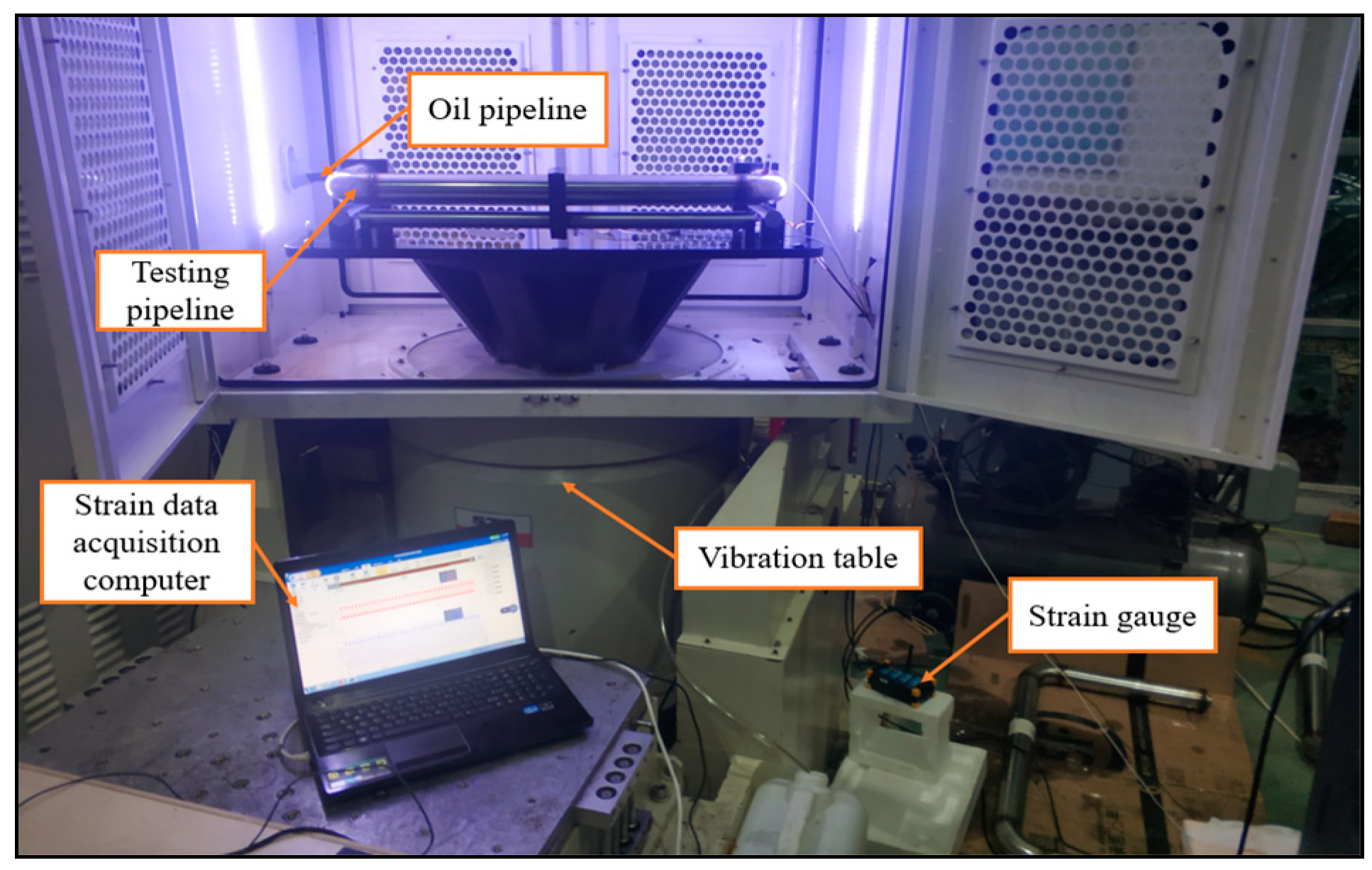
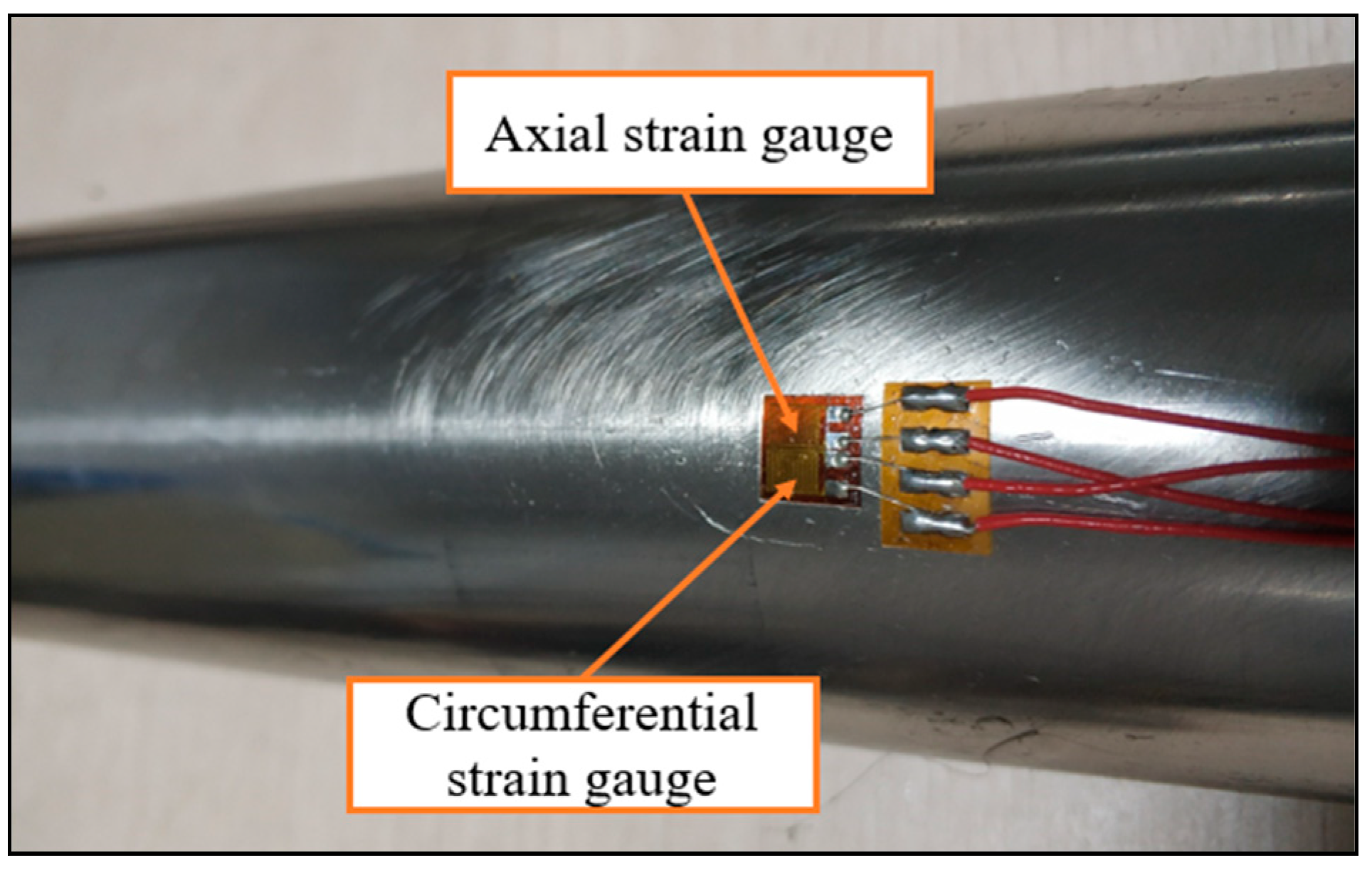
5.1. Experimental Set-Up
5.2. Preparation of Specimens and Grouping of Test Conditions
5.3. Experiment Result Analysis
5.3.1. Test Results Analysis of Group A
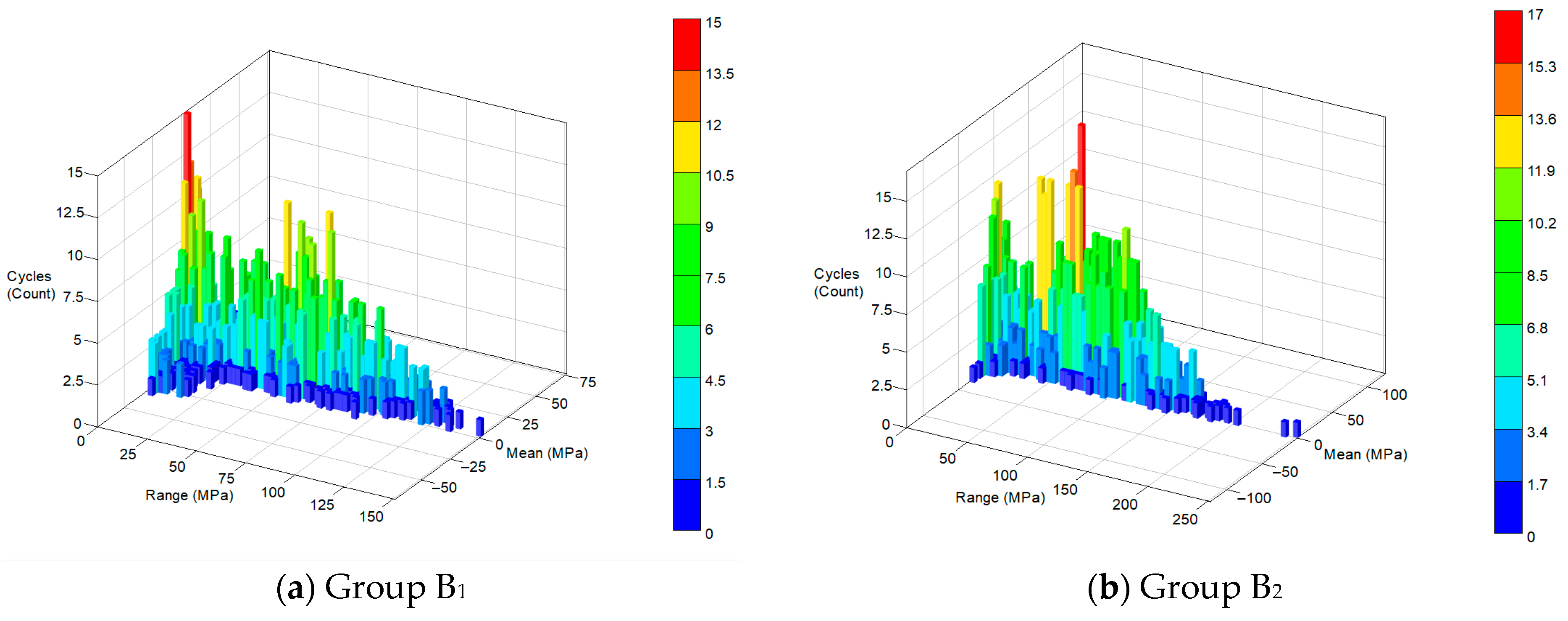
5.3.2. Test Results Analysis of Group B
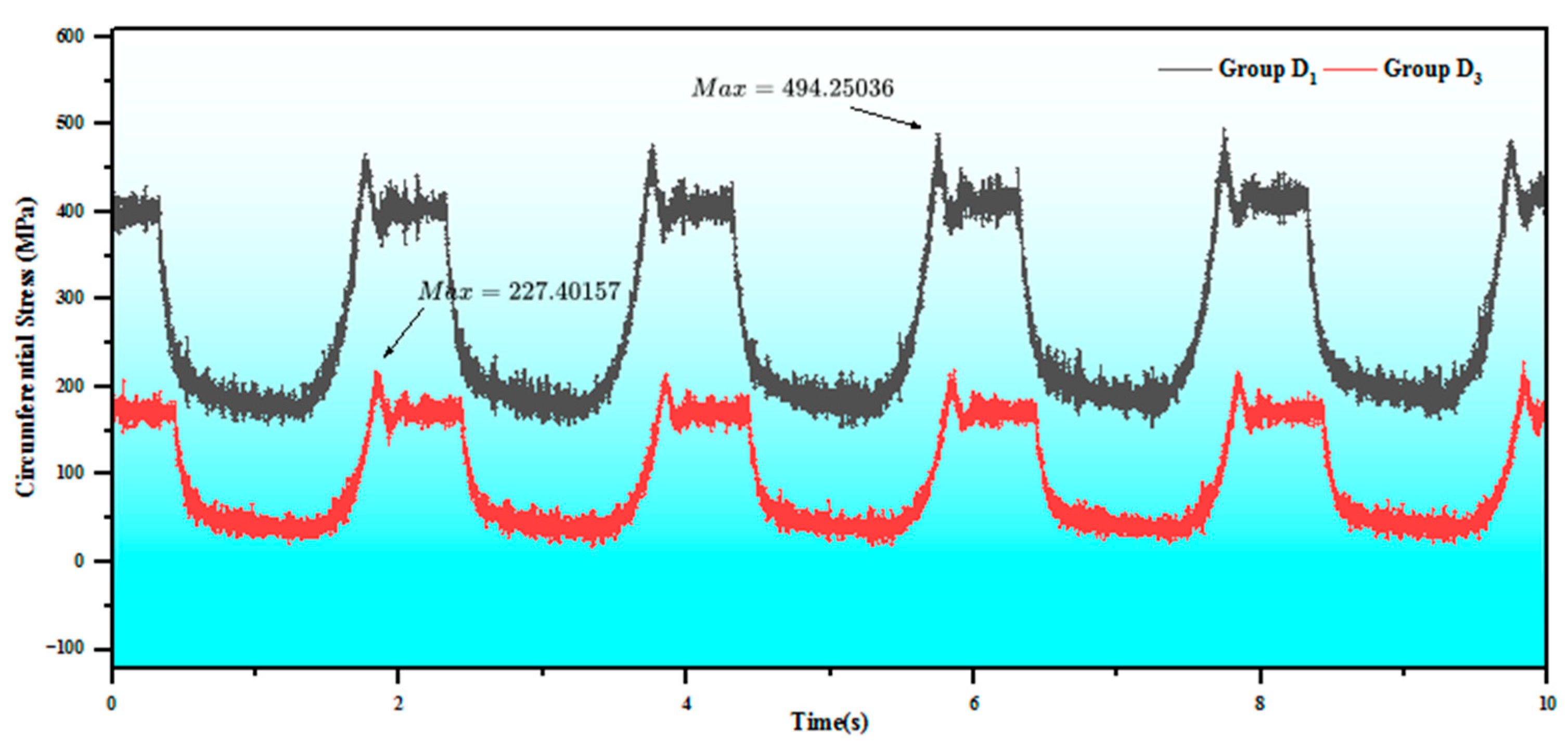
5.3.3. Test Results Analysis of Group C and D
6. Conclusions
- The danger point of the vibration response stress of the aircraft liquid-filled pipeline under the action of external random load is located above and below the contact between the support at both ends of the pipeline. The danger point of the vibration response stress under the action of internal fluid pulsation pressure is located at the inner corner of the pipe bend, so the damping device should be added in these two parts to reduce the vibration stress when designing the aircraft pipeline.
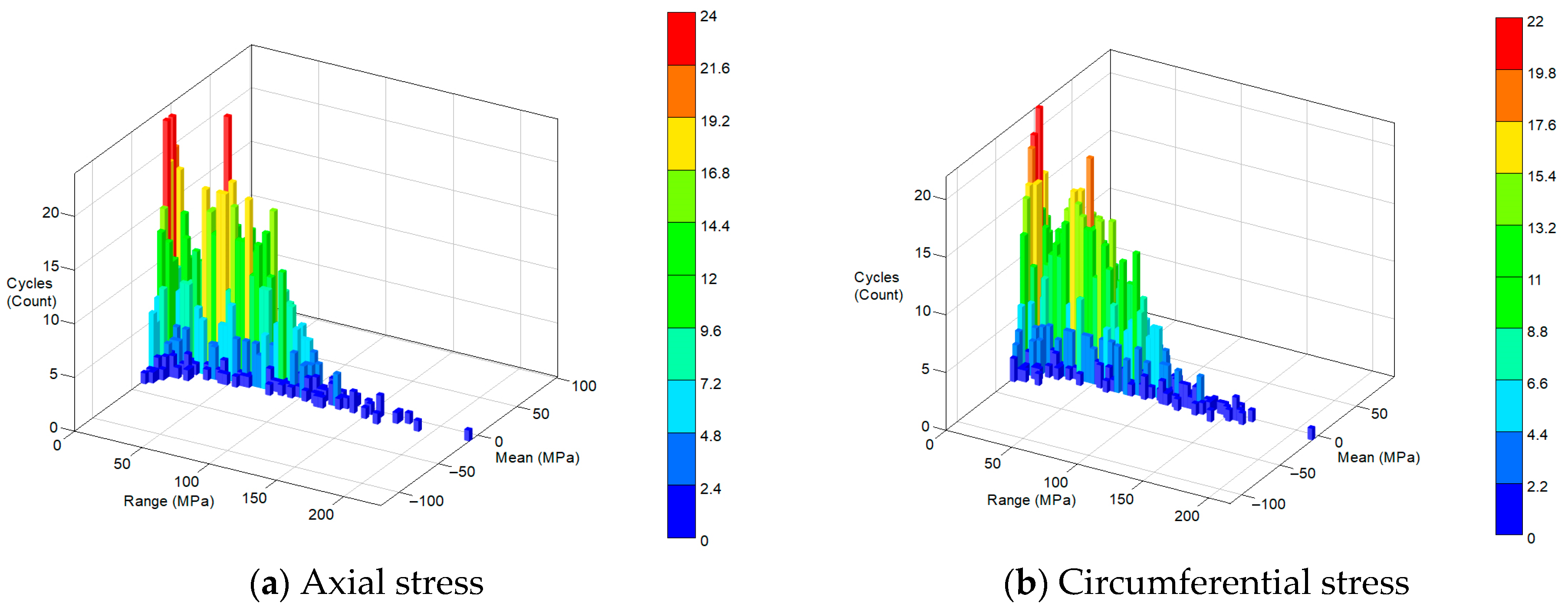
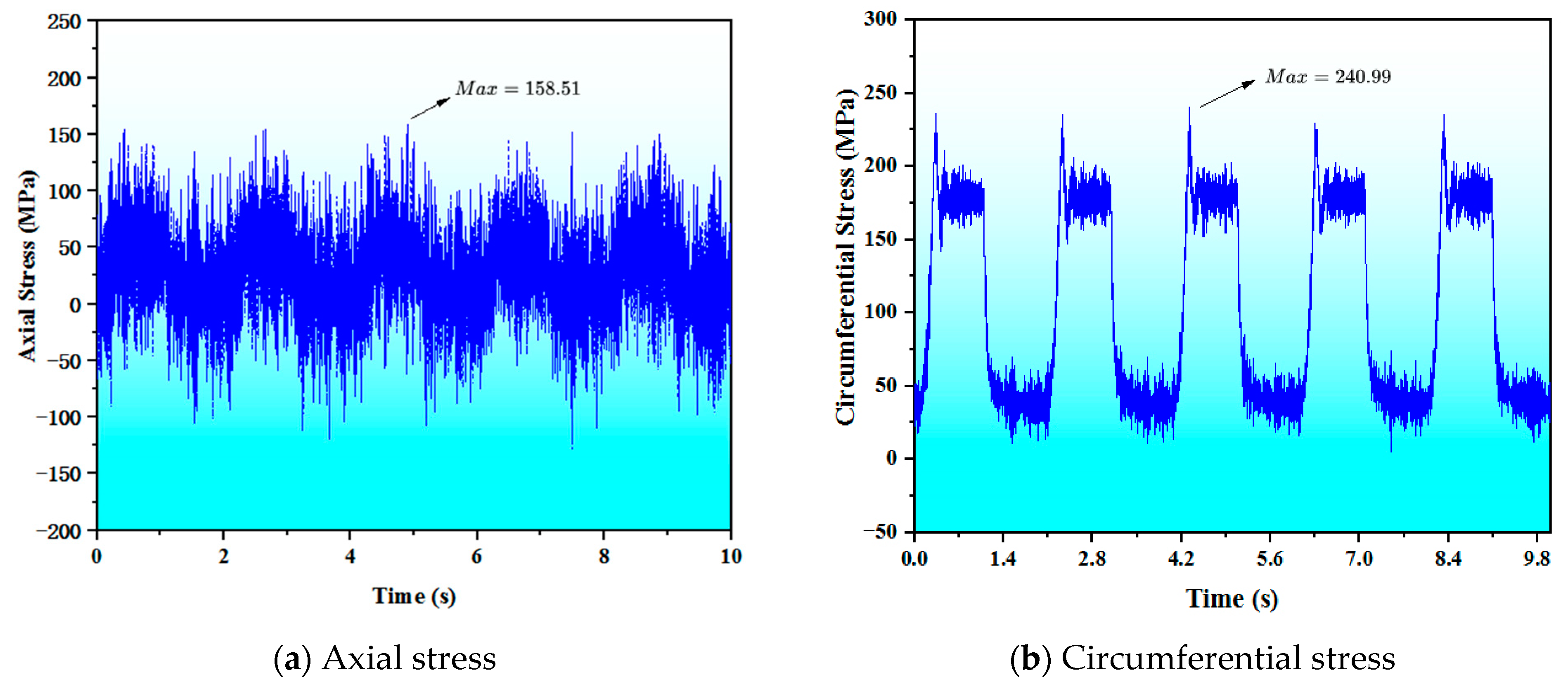
- The vibration response stress of the aircraft liquid-filled pipe under external random load is mainly axial stress, while the vibration response stress under internal fluid pulsation pressure is mainly circumferential stress, and the radial stress generated by both loads can be ignored, which provides a basis for aircraft vibration response analysis.
- Compared with the Gaussian random vibration load, the super-Gaussian random vibration load will have a larger response to the vibration of the aircraft liquid-filled pipe. Therefore, when carrying out the anti-fatigue design of the aircraft liquid-filled pipe, whether the external load has super-Gaussian characteristics should be fully considered.
- Under the same external load, the vibration response of the aircraft pipe is more intense than that of the empty pipe after it is filled with liquid. In the anti-fatigue design and simulation test of the aircraft duct, in order to obtain real and reliable results, the relevant design and test should be carried out considering the presence of liquid.
- The wall thickness of aircraft piping filled with liquid has a critical value. When the wall thickness is larger than this critical value, the stress decay of the vibration response gradually decreases with increasing wall thickness and tends to be stable under the same working conditions. Therefore, when designing aircraft piping, it is not the case that the thicker the wall thickness, the better. The appropriate wall thickness of the pipe should be selected by considering the economy, aircraft load capacity and vibration stress response of the pipe. At the same time, if the wall thickness of the pipe is below a certain value, plastic deformation will occur due to the pulsating pressure of the fluid, which should be taken into account when designing the aircraft pipe.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lian, J.; Yang, X.; Wang, H. Propagation characteristics analysis of high-frequency vibration in pumped storage power station based on a 1D Fluid-Structure Interaction model. J. Energy Storage 2023, 68, 107869. [Google Scholar] [CrossRef]
- Liu, Y.; Wei, J.; Du, H.; He, Z.; Yan, F. An Analysis of the Vibration Characteristics of an Aviation Hydraulic Pipeline with a Clamp. Aerospace 2023, 10, 900. [Google Scholar] [CrossRef]
- Zhang, T.; Cui, J. Analytical Method for Fluid-Structure Interaction Vibration Analysis of Hydraulic Pipeline System with Hinged Ends. Shock. Vib. 2021, 2021, 8846869. [Google Scholar] [CrossRef]
- Zhang, Y.; Ding, L.; Qi, M.; Bei, G. Numerical Analysis of Dynamic Characteristics of Thermowell Based on Two-Way Thermo-Fluid-Structure Interaction. Shock. Vib. 2021, 2021, 7759673. [Google Scholar] [CrossRef]
- Su, Y.; Gong, W. Research on vibration characteristics of rocket engine flow pipeline. Aircr. Eng. Aerosp. Technol. 2024, 96, 387–402. [Google Scholar] [CrossRef]
- Liang, Z.; Guo, C.; Wang, C. The Connection between flow pattern evolution and vibration in 90-degree pipeline: Bidirectional fluid-structure interaction. Energy Sci. Eng. 2022, 10, 308–323. [Google Scholar] [CrossRef]
- Liu, E.; Wang, X.; Zhao, W.; Su, Z.; Chen, Q. Analysis and Research on Pipeline Vibration of a Natural Gas Compressor Station and Vibration Reduction Measures. Energy Fuels 2021, 35, 479–492. [Google Scholar] [CrossRef]
- Qu, W.; Zhang, H.; Li, W.; Sun, W.; Zhao, L.; Ning, H. Influence of Support Stiffness on Dynamic Characteristics of the Hydraulic Pipe Subjected to Basic Vibration. Shock. Vib. 2018, 2018, 4035725. [Google Scholar] [CrossRef]
- Beatty, M.; Elías-Zúñiga, A. Stress-softening effects in the vibration of a non-Gaussian rubber membrane. Math. Mech. Solids 2003, 8, 481–495. [Google Scholar] [CrossRef]
- Jiang, Y.; Tao, J.; Zhang, Y.; Yun, G. Fatigue life prediction model for accelerated testing of electronic components under non-Gaussian random vibration excitations. Microelectron. Reliab. 2016, 64, 120–124. [Google Scholar] [CrossRef]
- Wang, Z.; Song, J. Equivalent linearization method using Gaussian mixture (GM-ELM) for nonlinear random vibration analysis. Struct. Saf. 2017, 64, 9–19. [Google Scholar] [CrossRef]
- Zheng, R.; Chen, H.; Vandepitte, D.; Luo, Z. Multi-exciter stationary non-Gaussian random vibration test with time domain randomization. Mech. Syst. Signal Process. 2019, 122, 103–116. [Google Scholar] [CrossRef]
- Ren, S.; Chen, H.; Zheng, R. Modified time domain randomization technique for multi-shaker non-stationary non-Gaussian random vibration control. Mech. Syst. Signal Process. 2024, 213, 111311. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Group | Simulation Condition |
|---|---|
| A | only stimulated by external random excitation |
| B | only stimulated by the pulsating fluid pressure in the pipe |
| C | combined action |
| Material | Material Density (kg/m3) | Young’s Modulus (GPa) | Poisson’s Ratio | Tensile Limit (MPa) | Dynamic Viscosity (Pa s) |
|---|---|---|---|---|---|
| SUS304 | 7850 | 204 | 0.3 | 520 | None |
| Steel | 7850 | 200 | 0.3 | 250 | None |
| Oil | 872 | 4.8 | 0 | None | 0.0279 |
| Group | Oil-Filled | Kurtosis | Random Load | Pulsating Liquid Pressure | Pipe Wall Thickness |
|---|---|---|---|---|---|
| A1 | No | 3 | Yes | No | 0.7 mm |
| A2 | No | 5 | Yes | No | 0.7 mm |
| A3 | No | 7 | Yes | No | 0.7 mm |
| B1(A1) | No | 3 | Yes | No | 0.7 mm |
| B2 | Yes | 3 | Yes | 0 Mpa | 0.7 mm |
| B3 | Yes | 3 | No | 0.5–5 Mpa | 0.7 mm |
| B4 | Yes | 3 | Yes | 0.5–5 Mpa | 0.7 mm |
| C1 | No | 3 | Yes | No | 0.5 mm |
| C2(A1) | No | 3 | Yes | No | 0.7 mm |
| C3 | No | 3 | Yes | No | 1 mm |
| C4 | No | 3 | Yes | No | 1.4 mm |
| D1 | Yes | 3 | Yes | 0.5–5 Mpa | 0.5 mm |
| D2(B4) | Yes | 3 | Yes | 0.5–5 Mpa | 0.7 mm |
| D3 | Yes | 3 | Yes | 0.5–5 Mpa | 1 mm |
| D4 | Yes | 3 | Yes | 0.5–5 Mpa | 1.4 mm |
| Group | Excitation Signal Kurtosis | Stress Response Kurtosis | Stress Response Kurtosis Attenuation Degree | |||
|---|---|---|---|---|---|---|
| Design Kurtosis | Actual Kurtosis | Axial Stress | Circumferential Stress | Axial Stress | Circumferential Stress | |
| A1 | 3 | 3.3 | 2.74 | 2.83 | 16.9% | 14.2% |
| A2 | 5 | 5.2 | 3.49 | 3.79 | 32.9% | 27.1% |
| A3 | 7 | 7.4 | 3.75 | 4.07 | 49.3% | 45% |
| Group | Wall Thickness/mm | Wall Thickness Increase Ratio | Maximum Value of Axial Stress/MPa | Maximum Value of Axial Stress Reduce Ratio |
|---|---|---|---|---|
| C1 | 0.5 | 0 | 301 | 0 |
| C2(A1) | 0.7 | 40% | 151 | 50% |
| C3 | 1 | 43% | 144 | 4.6% |
| C4 | 1.4 | 40% | 138 | 4.2% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, L.; Chen, C.; Jiang, Y. Simulation Analysis and Experimental Investigation on the Fluid–Structure Interaction Vibration Characteristics of Aircraft Liquid-Filled Pipelines under the Superimposed Impact of External Random Vibration and Internal Pulsating Pressure. Appl. Sci. 2024, 14, 8008. https://doi.org/10.3390/app14178008
Zhu L, Chen C, Jiang Y. Simulation Analysis and Experimental Investigation on the Fluid–Structure Interaction Vibration Characteristics of Aircraft Liquid-Filled Pipelines under the Superimposed Impact of External Random Vibration and Internal Pulsating Pressure. Applied Sciences. 2024; 14(17):8008. https://doi.org/10.3390/app14178008
Chicago/Turabian StyleZhu, Lei, Chang Chen, and Yu Jiang. 2024. "Simulation Analysis and Experimental Investigation on the Fluid–Structure Interaction Vibration Characteristics of Aircraft Liquid-Filled Pipelines under the Superimposed Impact of External Random Vibration and Internal Pulsating Pressure" Applied Sciences 14, no. 17: 8008. https://doi.org/10.3390/app14178008
APA StyleZhu, L., Chen, C., & Jiang, Y. (2024). Simulation Analysis and Experimental Investigation on the Fluid–Structure Interaction Vibration Characteristics of Aircraft Liquid-Filled Pipelines under the Superimposed Impact of External Random Vibration and Internal Pulsating Pressure. Applied Sciences, 14(17), 8008. https://doi.org/10.3390/app14178008