
A Method for All-Weather Unstructured Road Drivable Area Detection Based on Improved Lite-Mobilenetv2

Abstract
:1. Introduction
2. Method
2.1. Road Drivable Area Detection
2.1.1. Improvement of the Lite-Mobilenetv2 Feature Extraction Module
2.1.2. The Pyramid-Pool Module of Integrated Attention Mechanism
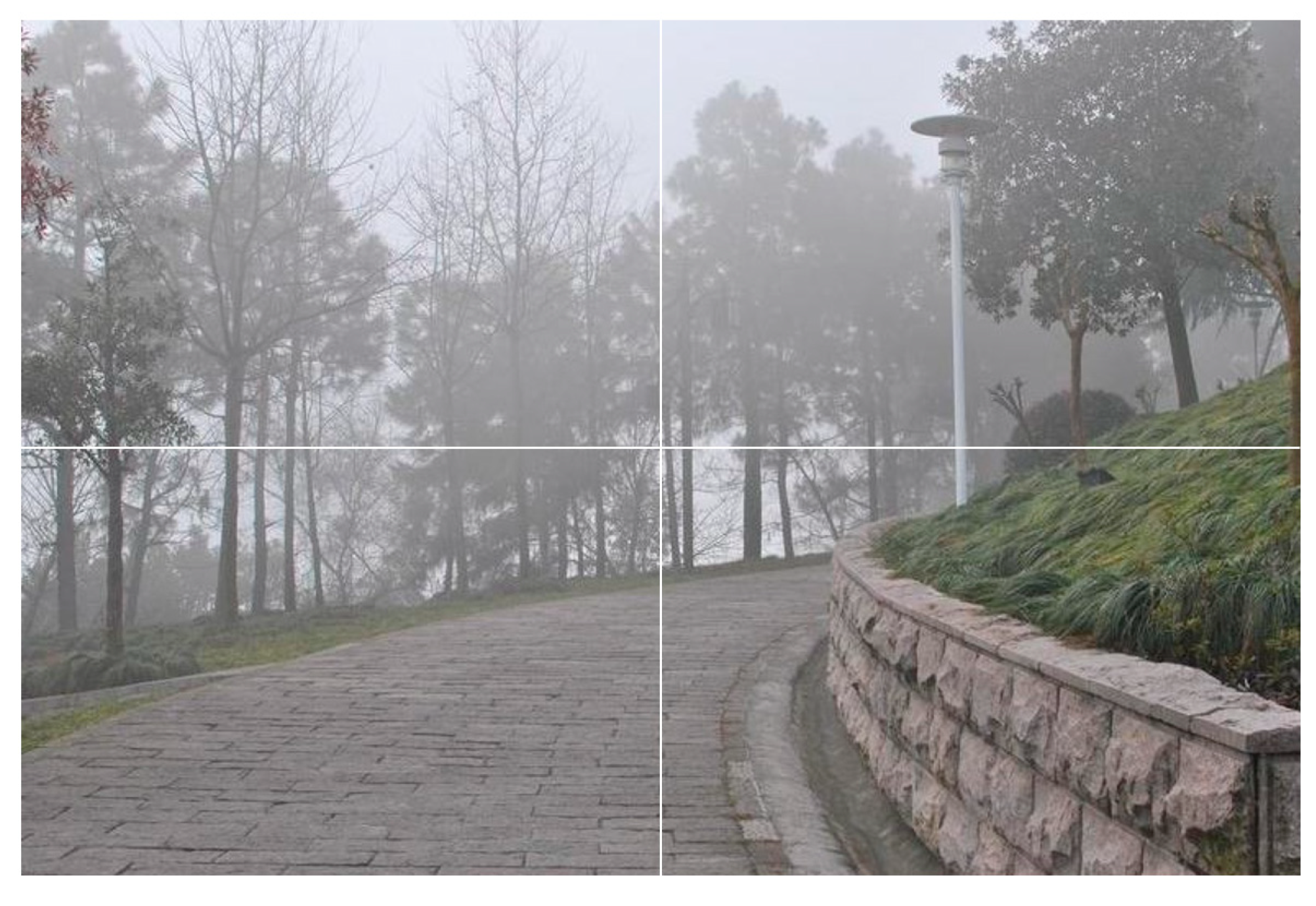
2.2. Preprocessing Module for Dehazing Design
2.2.1. Dark Channel Prior Dehazing
2.2.2. Weighted Aggregation-Guided Filtering
2.2.3. Quadtree Search Algorithm for Atmospheric Light Value
2.2.4. Image Fusion
2.3. Semantic Segmentation Model Training
3. Experiments and Analysis
3.1. Comparison of Haze-Free Detection Algorithms
3.1.1. Comparison with Labeled Images
3.1.2. Objective Data Comparison
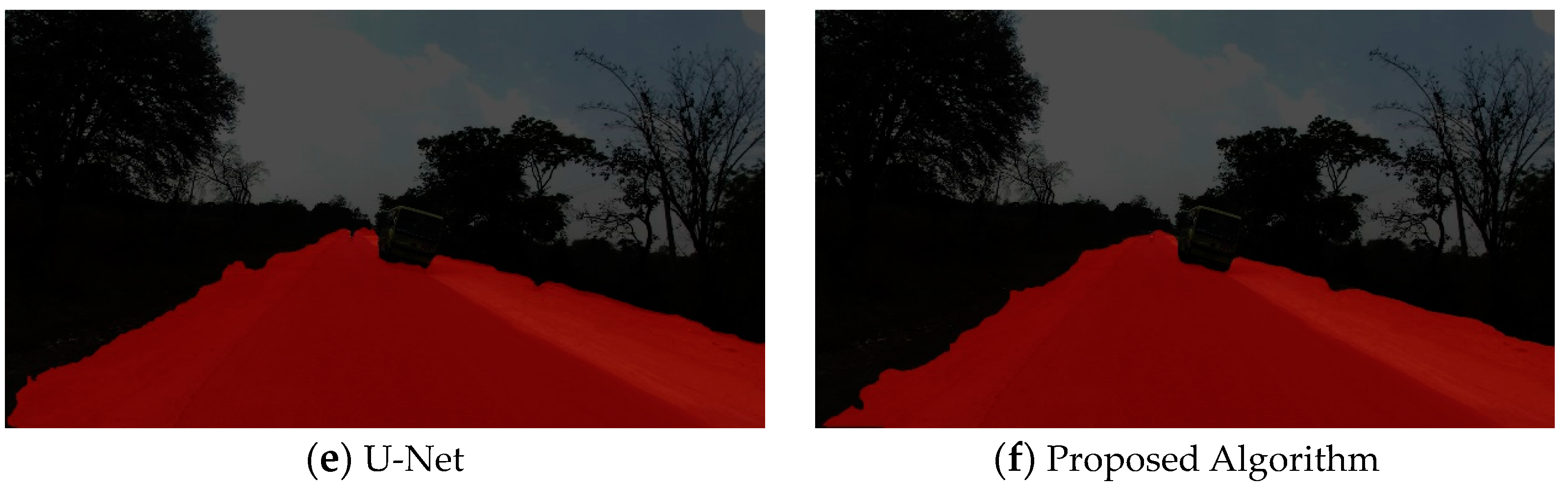
3.2. Comparison of Dehazing Detection Algorithms
3.2.1. Comparison with Labeled Images
3.2.2. Objective Data Comparison
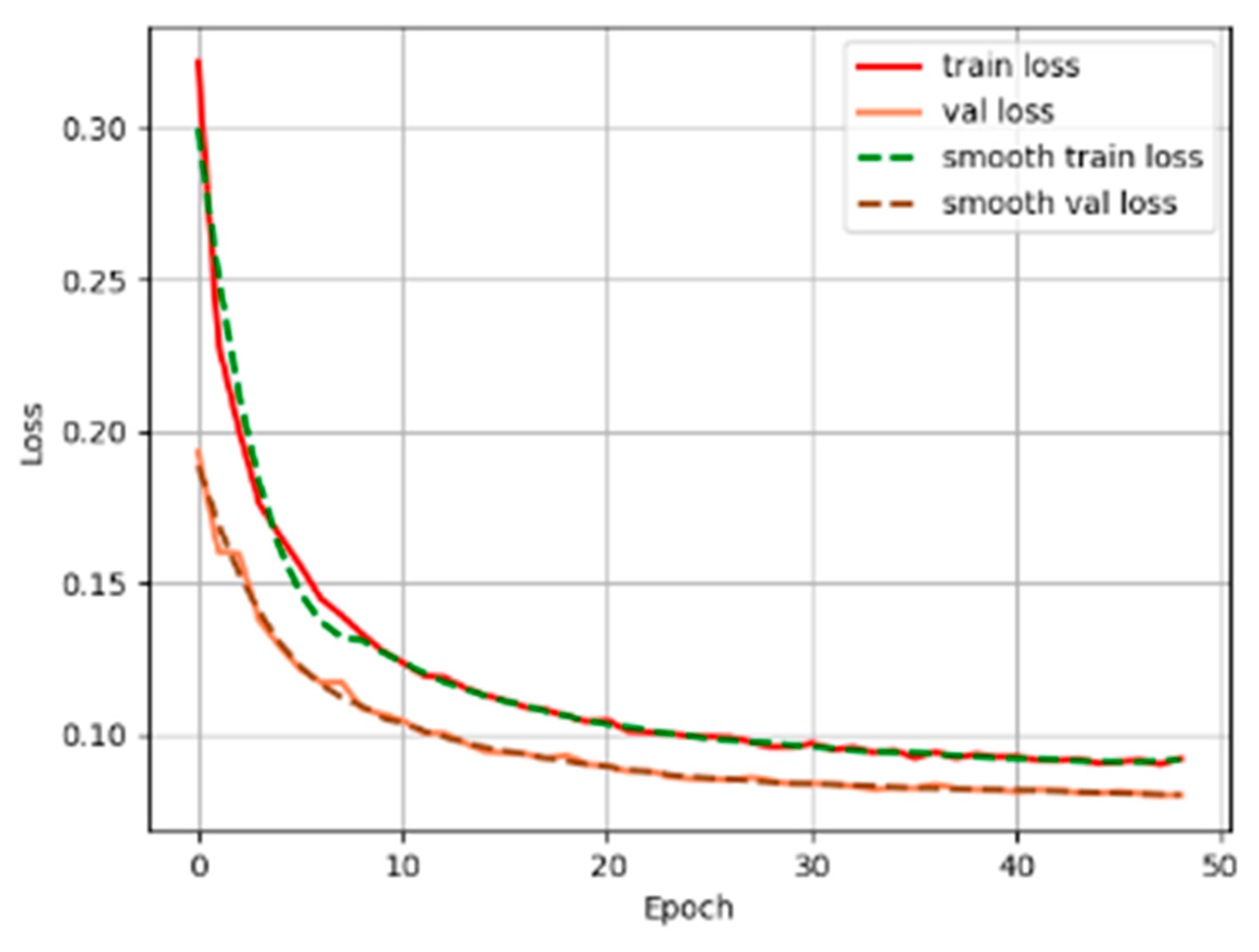
3.3. Training Results of Semantic Segmentation Model
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Clements, L.M.; Kockelman, K.M. Economic effects of automated vehicles. Transp. Res. Rec. 2017, 2606, 106–114. [Google Scholar] [CrossRef]
- Kim, K.; Kim, B.; Lee, K.; Ko, B.; Yi, K. Design of integrated risk management-based dynamic driving control of automated vehicles. IEEE Intell. Transp. Syst. Mag. 2017, 9, 57–73. [Google Scholar] [CrossRef]
- Yenikaya, S.; Yenikaya, G.; Düven, E. Keeping the vehicle on the road: A survey on on-road lane detection systems. ACM Comput. Surv. (CSUR) 2013, 46, 1–43. [Google Scholar] [CrossRef]
- Almalioglu, Y.; Turan, M.; Trigoni, N.; Markham, A. Deep learning-based robust positioning for all-weather autonomous driving. Nat. Mach. Intell. 2022, 4, 749–760. [Google Scholar] [CrossRef]
- Lee, D.-G. Fast Drivable Areas Estimation with Multi-Task Learning for Real-Time Autonomous Driving Assistant. Appl. Sci. 2021, 11, 10713. [Google Scholar] [CrossRef]
- Shang, E.; An, X.; Li, J.; Ye, L.; He, H. Robust unstructured road detection: The importance of contextual information. Int. J. Adv. Robot. Syst. 2013, 10, 179. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep Learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Shi, J.; Qi, X.; Wang, X.; Jia, J. Pyramid scene parsing network. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Zhou, Z.; Siddiquee, M.M.R.; Tajbakhsh, N.; Liang, J. UNet++: A nested U-Net architecture for medical image segmentation. In Proceedings of the Deep Learning in Medical Image Analysis and Multimodal Learning for Clinical Decision Support: 4th International Workshop, DLMIA 2018, and 8th International Workshop, ML-CDS 2018, Held in Conjunction with MICCAI 2018, Granada, Spain, 20 September 2018. [Google Scholar]
- Wang, X.; Hu, Z.; Shi, S.; Hou, M.; Xu, L.; Zhang, X. A deep learning method for optimizing semantic segmentation accuracy of remote sensing images based on improved UNet. Sci. Rep. 2023, 13, 7600. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, C.; Wu, H.; Chen, P. An improved Deeplabv3+ semantic segmentation algorithm with multiple loss constraints. PLoS ONE 2022, 17, e0261582. [Google Scholar] [CrossRef]
- Liu, S.; Li, Y.; Li, H.; Wang, B.; Wu, Y.; Zhang, Z. Visual Image Dehazing Using Polarimetric Atmospheric Light Estimation. Appl. Sci. 2023, 13, 10909. [Google Scholar] [CrossRef]
- Wang, C.; Ding, M.; Zhang, Y.; Wang, L. A Single Image Enhancement Technique Using Dark Channel Prior. Appl. Sci. 2021, 11, 2712. [Google Scholar] [CrossRef]
- Yan, B.; Yang, Z.; Sun, H.; Wang, C. ADE-CycleGAN: A Detail Enhanced Image Dehazing CycleGAN Network. Sensors 2023, 23, 3294. [Google Scholar] [CrossRef] [PubMed]
- Engin, D.; Genc, A.; Ekenel, H.K. Cycle-Dehaze: Enhanced CycleGAN for Single Image Dehazing. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Li, A.; Xu, G.; Yue, W.; Xu, C.; Gong, C.; Cao, J. Object Detection in Hazy Environments, Based on an All-in-One Dehazing Network and the YOLOv5 Algorithm. Electronics 2024, 13, 1862. [Google Scholar] [CrossRef]
- Yu, Y.; Lu, Y.; Wang, P.; Han, Y.; Xu, T.; Li, J. Drivable Area Detection in Unstructured Environments based on Lightweight Convolutional Neural Network for Autonomous Driving Car. Appl. Sci. 2023, 13, 9801. [Google Scholar] [CrossRef]
- Chollet, F. Xception: Deep Learning with Depthwise Separable Convolutions. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1800–1807. [Google Scholar] [CrossRef]
- Sci, J.H. Relu Deep Neural Networks and Linear Finite Elements. J. Comput. Math. 2020, 38, 502–527. [Google Scholar] [CrossRef]
- Song, L.; Fan, J.; Chen, D.R.; Zhou, D.X. Correction: Approximation of Nonlinear Functionals Using Deep ReLU Networks. J. Fourier Anal. Appl. 2023, 29, 57. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Song, Y.; Rong, X. The Influence of the Activation Function in a Convolution Neural Network Model of Facial Expression Recognition. Appl. Sci. 2020, 10, 1897. [Google Scholar] [CrossRef]
- Yu, M.; Zhang, W.; Chen, X.; Liu, Y.; Niu, J. An End-to-End Atrous Spatial Pyramid Pooling and Skip-Connections Generative Adversarial Segmentation Network for Building Extraction from High-Resolution Aerial Images. Appl. Sci. 2022, 12, 5151. [Google Scholar] [CrossRef]
- Zhu, T.; Liu, Q.; Zhang, L. An Adaptive Atrous Spatial Pyramid Pooling Network for Hyperspectral Classification. Electronics 2023, 12, 5013. [Google Scholar] [CrossRef]
- Kardakis, S.; Perikos, I.; Grivokostopoulou, F.; Hatzilygeroudis, I. Examining Attention Mechanisms in Deep Learning Models for Sentiment Analysis. Appl. Sci. 2021, 11, 3883. [Google Scholar] [CrossRef]
- An, W.; Wu, G. Hybrid Spatial-Channel Attention Mechanism for Cross-Age Face Recognition. Electronics 2024, 13, 1257. [Google Scholar] [CrossRef]
- Liu, B.; Lv, Y.; Gu, Y.; Lv, W. Implementation of a Lightweight Semantic Segmentation Algorithm in Road Obstacle Detection. Sensors 2020, 20, 7089. [Google Scholar] [CrossRef] [PubMed]
- Banerjee, S.; Chaudhuri, S.S. Nighttime image-dehazing: A review and quantitative benchmarking. Arch. Comput. Methods Eng. 2021, 28, 2943–2975. [Google Scholar] [CrossRef]
- Tsai, C.-Y.; Chen, C.-L. Attention-Gate-Based Model with Inception-like Block for Single-Image Dehazing. Appl. Sci. 2022, 12, 6725. [Google Scholar] [CrossRef]
- Zhu, Z.; Luo, Y.; Wei, H.; Li, Y.; Qi, G.; Mazur, N.; Li, Y.; Li, P. Atmospheric light estimation based remote sensing image dehazing. Remote Sens. 2021, 13, 2432. [Google Scholar] [CrossRef]
- Wu, L.; Chen, J.; Chen, S.; Yang, X.; Xu, L.; Zhang, Y.; Zhang, J. Hybrid Dark Channel Prior for Image Dehazing Based on Transmittance Estimation by Variant Genetic Algorithm. Appl. Sci. 2023, 13, 4825. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Single image haze removal using dark channel prior. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 33, 2341. [Google Scholar]
- Li, C.; Yuan, C.; Pan, H.; Yang, Y.; Wang, Z.; Zhou, H.; Xiong, H. Single-Image Dehazing Based on Improved Bright Channel Prior and Dark Channel Prior. Electronics 2023, 12, 299. [Google Scholar] [CrossRef]
- Agrawal, S.C.; Jalal, A.S. A Comprehensive Review on Analysis and Implementation of Recent Image Dehazing Methods. Arch. Comput. Methods Eng. 2022, 29, 4799–4850. [Google Scholar] [CrossRef]
- Li, Z.; Zheng, J.; Zhu, Z.; Yao, W.; Wu, S. Weighted Guided Image Filtering. IEEE Trans. Image Process. 2015, 24, 120–129. [Google Scholar]
- Chen, B.; Wu, S. Weighted aggregation for guided image filtering. Signal Image Video Process. 2020, 14, 491–498. [Google Scholar] [CrossRef]
- Liu, S.; Li, H.; Zhao, J.; Liu, J.; Zhu, Y.; Zhang, Z. Atmospheric Light Estimation Using Polarization Degree Gradient for Image Dehazing. Sensors 2024, 24, 3137. [Google Scholar] [CrossRef] [PubMed]
- Haouassi, S.; Wu, D. Image Dehazing Based on (CMTnet) Cascaded Multi-scale Convolutional Neural Networks and Efficient Light Estimation Algorithm. Appl. Sci. 2020, 10, 1190. [Google Scholar] [CrossRef]
- Zhu, Z.; Wei, H.; Hu, G.; Li, Y.; Qi, G.; Mazur, N. Novel Fast Single Image Dehazing Algorithm Based on Artificial Multiexposure Image Fusion. IEEE Trans. Instrum. Meas. 2021, 70, 5001523. [Google Scholar] [CrossRef]
- Namyup, K.; Dongwon, K.; Cuiling, L. ReSTR: Convolution-free Referring Image Segmentation Using Transformers. IEEE Trans. Circuits Syst. Video Technol. 2018, 28, 3174–3182. [Google Scholar]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmentation. Comput. Vis. 2018, 833, 801–818. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Size (H2 × C) | Operator | c | n | s |
|---|---|---|---|---|
| 5122 × 3 | Conv2d | 32 | 1 | 2 |
| 2562 × 32 | Lite-bottleneck | 16 | 1 | 1 |
| 2562 × 16 | Lite-bottleneck | 24 | 2 | 2 |
| 1282 × 24 | Lite-bottleneck | 32 | 3 | 2 |
| 642 × 32 | Lite-bottleneck | 64 | 4 | 2 |
| 322 × 64 | Lite-bottleneck | 96 | 3 | 1 |
| 322 × 96 | Lite-bottleneck | 160 | 3 | 2 |
| 322 × 160 | Lite-bottleneck | 320 | 1 | 1 |
| Training Plan | First Training | Second Training |
|---|---|---|
| 1 | Mixed training with dehazed and haze-free datasets | — |
| 2 | Dehazed dataset | Haze-free dataset |
| 3 | Haze-free dataset | Dehazed dataset |
| 4 | Dehazed dataset | — |
| 5 | Haze-free dataset | — |
| Model | mIoU (%) | FPS |
|---|---|---|
| DeepLabv3+ | 92 | 35.3 |
| U-Net | 93.6 | 12.4 |
| PSP-Net | 87.84 | 52.6 |
| Proposed Algorithm | 94.54 | 39.4 |
| Image Categories | mIoU (%) | Runtime (s) |
|---|---|---|
| Hazy image | 75.02 | — |
| Clear image | 94.54 | — |
| Cycle-GAN | 87.04 | 0.8 (CUDA) |
| Dark Channel Prior | 88.43 | 0.04 |
| AOD-Net | 85.59 | 0.03 (CUDA) |
| Proposed method | 91.55 | 0.008 (CUDA) |
| mIoU (%) on Hazed Dataset | mIoU (%) on Clear Dataset | Average mIoU (%) | |
|---|---|---|---|
| Mixed training | 92.34 | 93.39 | 92.865 |
| Training the dehazing dataset separately | 93.56 | 87.52 | 90.54 |
| Training the haze-free dataset separately | 91.55 | 94.54 | 93.045 |
| Joint training 1 | 91.02 | 91.43 | 91.225 |
| Joint training 2 | 94.5 | 94.26 | 94.38 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Lyu, C.; Li, Y. A Method for All-Weather Unstructured Road Drivable Area Detection Based on Improved Lite-Mobilenetv2. Appl. Sci. 2024, 14, 8019. https://doi.org/10.3390/app14178019
Wang Q, Lyu C, Li Y. A Method for All-Weather Unstructured Road Drivable Area Detection Based on Improved Lite-Mobilenetv2. Applied Sciences. 2024; 14(17):8019. https://doi.org/10.3390/app14178019
Chicago/Turabian StyleWang, Qingyu, Chenchen Lyu, and Yanyan Li. 2024. "A Method for All-Weather Unstructured Road Drivable Area Detection Based on Improved Lite-Mobilenetv2" Applied Sciences 14, no. 17: 8019. https://doi.org/10.3390/app14178019