
A Path Planning Method Based on Hybrid Sand Cat Swarm Optimization Algorithm of Green Multimodal Transportation


Abstract
1. Introduction
2. Green Vehicle Comprehensive Multimodal Transport Model
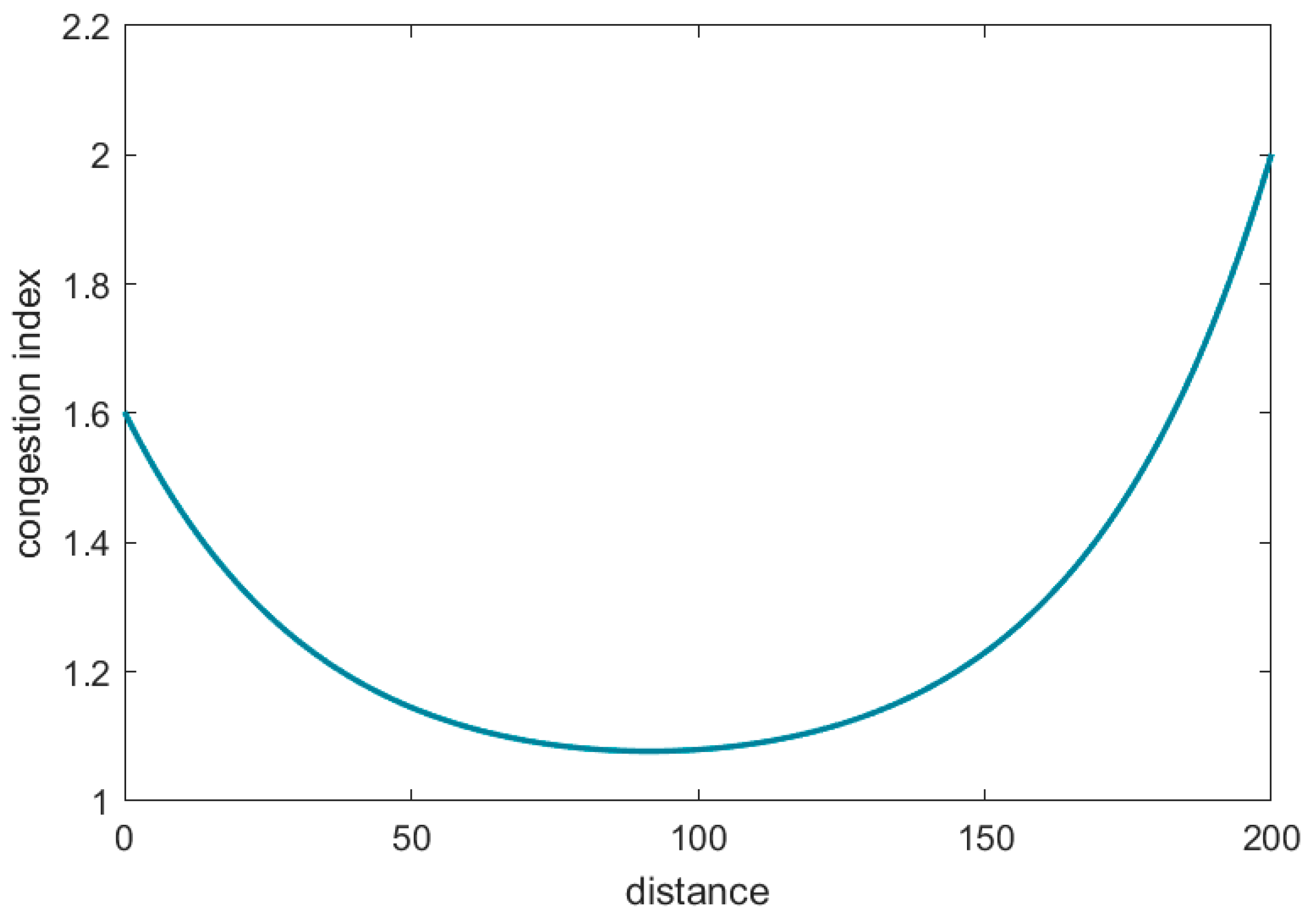
2.1. Road Congestion Index
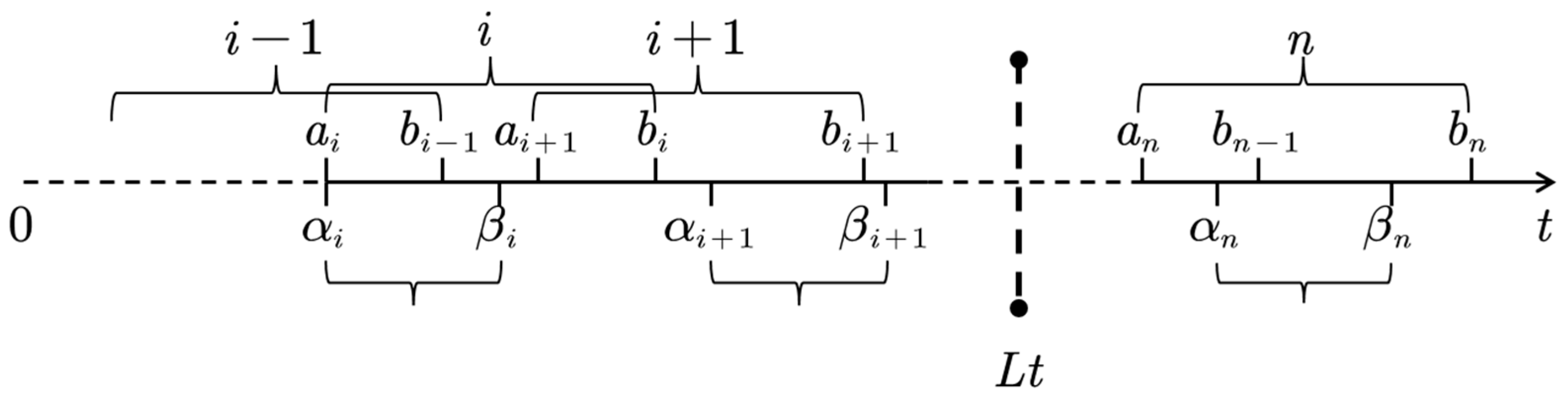
2.2. Hybrid Embedded Time Window
2.3. Model Construction
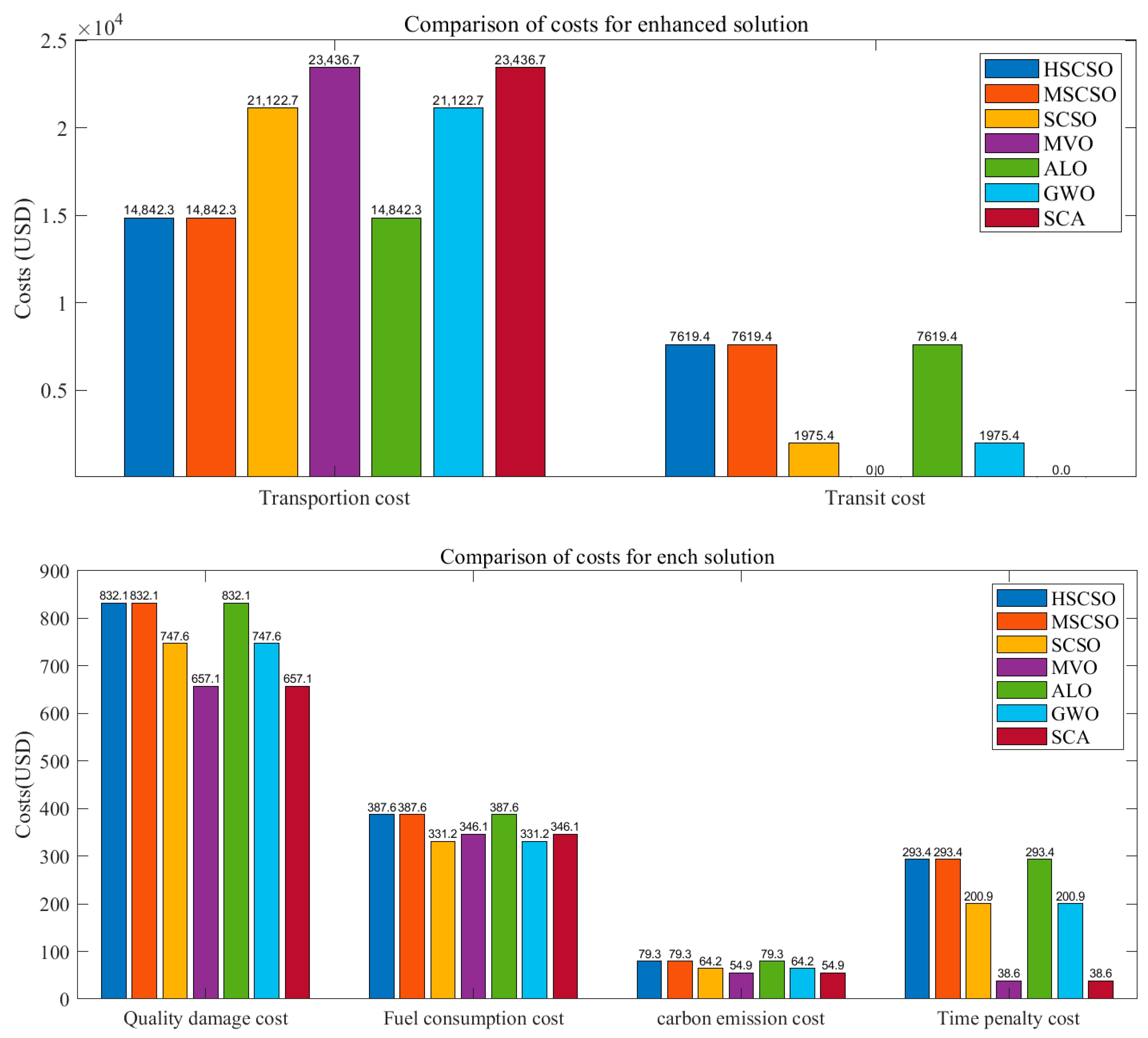
2.3.1. Transportation Cost
2.3.2. Transit Cost
2.3.3. Quality Damage Cost
2.3.4. Fuel Consumption Cost
2.3.5. Carbon Emission Cost
2.3.6. Time Penalty Cost
2.4. Model Assumptions
- (1)
- The transportation volume cannot be divided. The same batch of vehicles can be transported through the only route. Also, only one mode of transportation can be selected between two nodes, and this mode can be changed only at the node.
- (2)
- If the transportation mode is not changed when passing through the transfer node, there is no transfer, with no carbon emission costs incurred.
- (3)
- The process of transportation is in an ideal state, the speed of transport is constant, and the impact of emergencies is negligible, such as extreme weather and traffic accidents.
- (4)
- Lorries, trains, and ships are single models in their respective categories, each with the same capacity and fuel consumption. The number of vehicles transported in a single trip is smaller than the capacity of railway or waterway transport.
- (5)
- The short-distance transportation at transfer points and terminal handovers are discounted.
- (6)
- The weight of the vehicles is constant and the unit price is known.
3. The Sand Cat Swarm Optimization Algorithm
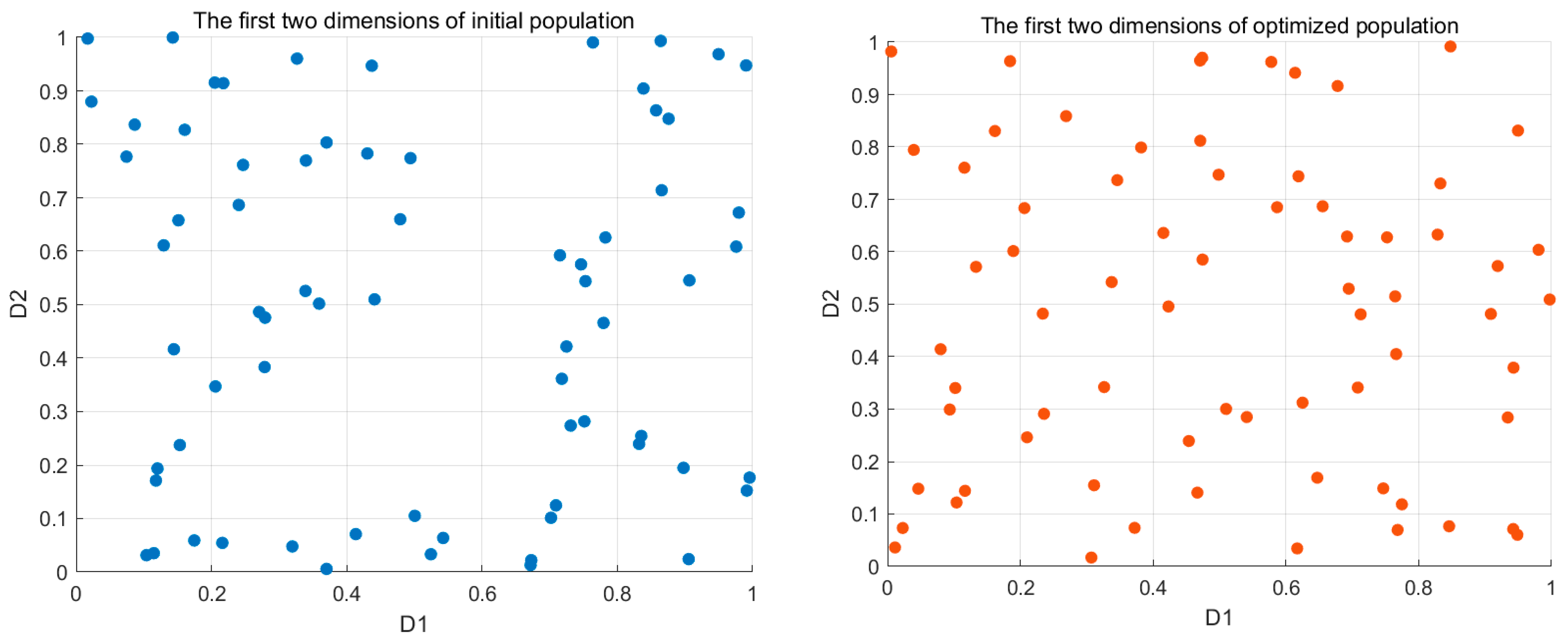
3.1. Initialize Population
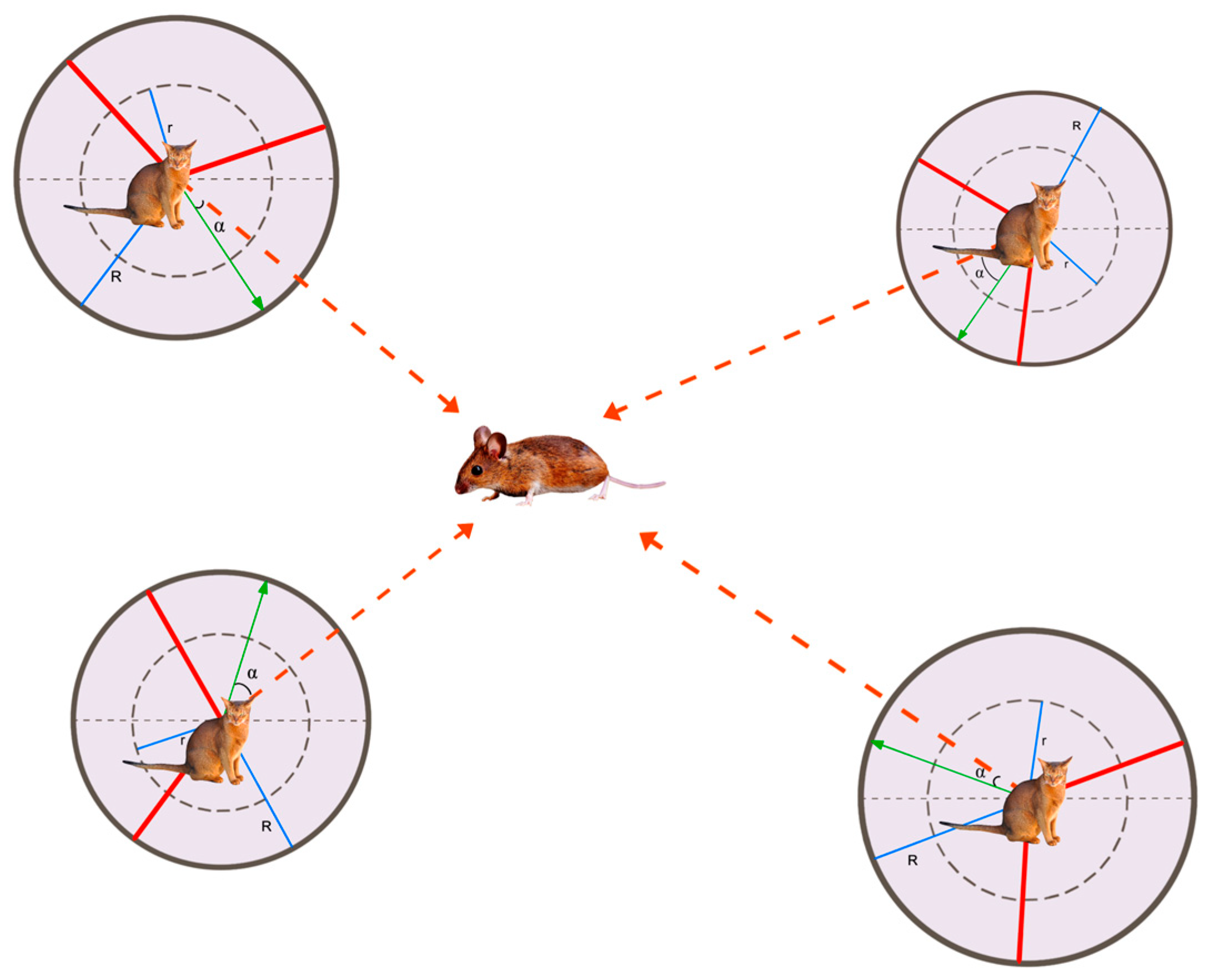
3.2. Search for Prey
3.3. Attack Prey
3.4. Implementation of the SCSO Algorithm
| Algorithm 1 The framework of SCSO algorithm | |
| 1: | Initialize the algorithm-related parameters , , and R |
| 2: | Initialize the maximum generations |
| 3: | Initialize the number of the population |
| 4: | Initialize the population |
| 5: | Calculate the fitness function based on the objective function |
| 6: | While () |
| 7: | For each finder |
| 8: | If |
| 9: | The finder conducts searching behavior based on Formal (19) |
| 10: | Else |
| 11: | Randomize the target of attack |
| 12: | The finder conducts attacking behavior based on Formal (19) |
| 13: | end if |
| 14: | end for |
| 15: | t++ |
| 16: | end while |
4. Hybrid Sand Cat Swarm Optimization Algorithm
4.1. Logistic–Tent Chaotic Mapping Initialization
4.2. Introduction of Momentum–Bellicose Strategy in Search and Attack
4.3. Elite Crossover Pool
4.4. Adaptive Lens Opposition-Based Learning Strategy for Mutation
| Algorithm 2 The framework of HSCSO algorithm | |
| 1: | Initialize the algorithm-related parameters , and R |
| 2: | Initialize the maximum generations |
| 3: | Initialize the number of the population |
| 4: | Initialize population using Logistic–Tent chaotic mapping by Formula (18) |
| 5: | Calculate the fitness function based on the objective function |
| 6: | While () |
| 7: | For each finder |
| 8: | If |
| 9: | The finder conducts searching behavior |
| 10: | Update the finder’s position with the momentum strategy using Formal (19) |
| 11: | Else |
| 12: | The finder conducts attacking behavior |
| 13: | Randomize the target of attack |
| 14: | Update the finder’s position with the bellicose factor using Formal (23) |
| 15: | end if |
| 16: | Add the two best finder positions and their means to the elite crossover pool |
| 17: | For 10% worst finder |
| 18: | Randomly crossover with a solution from the elite crossover pool using Formal (24) |
| 19: | end for |
| 20: | Conduct the adaptive lens opposition-based learning according to Formula (26) |
| 21: | t++ |
| 22: | end while |
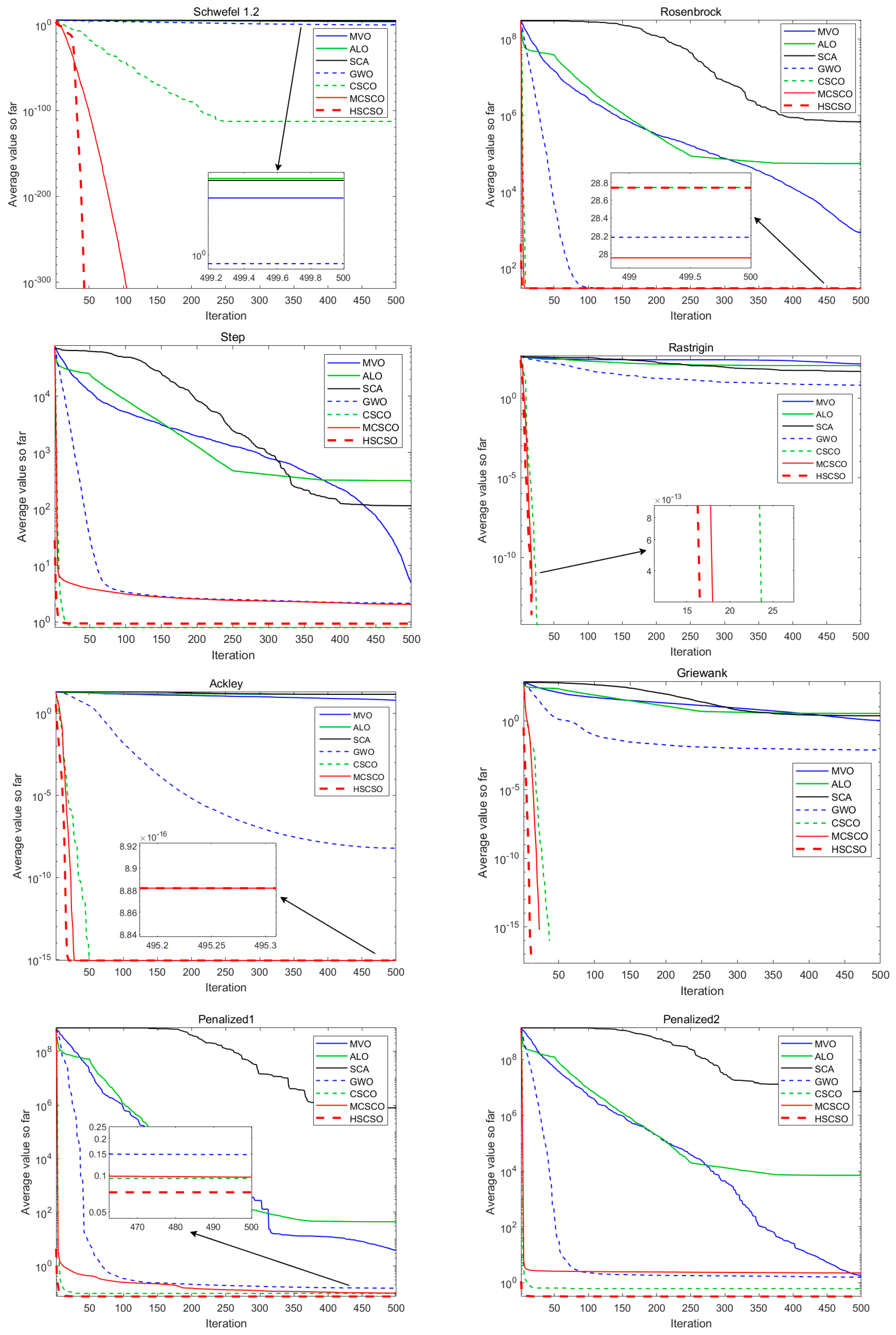
5. Experiment for Benchmark Functions
6. Simulation Experimental for Multimodal Vehicle Logistics
6.1. Experimental Parameters
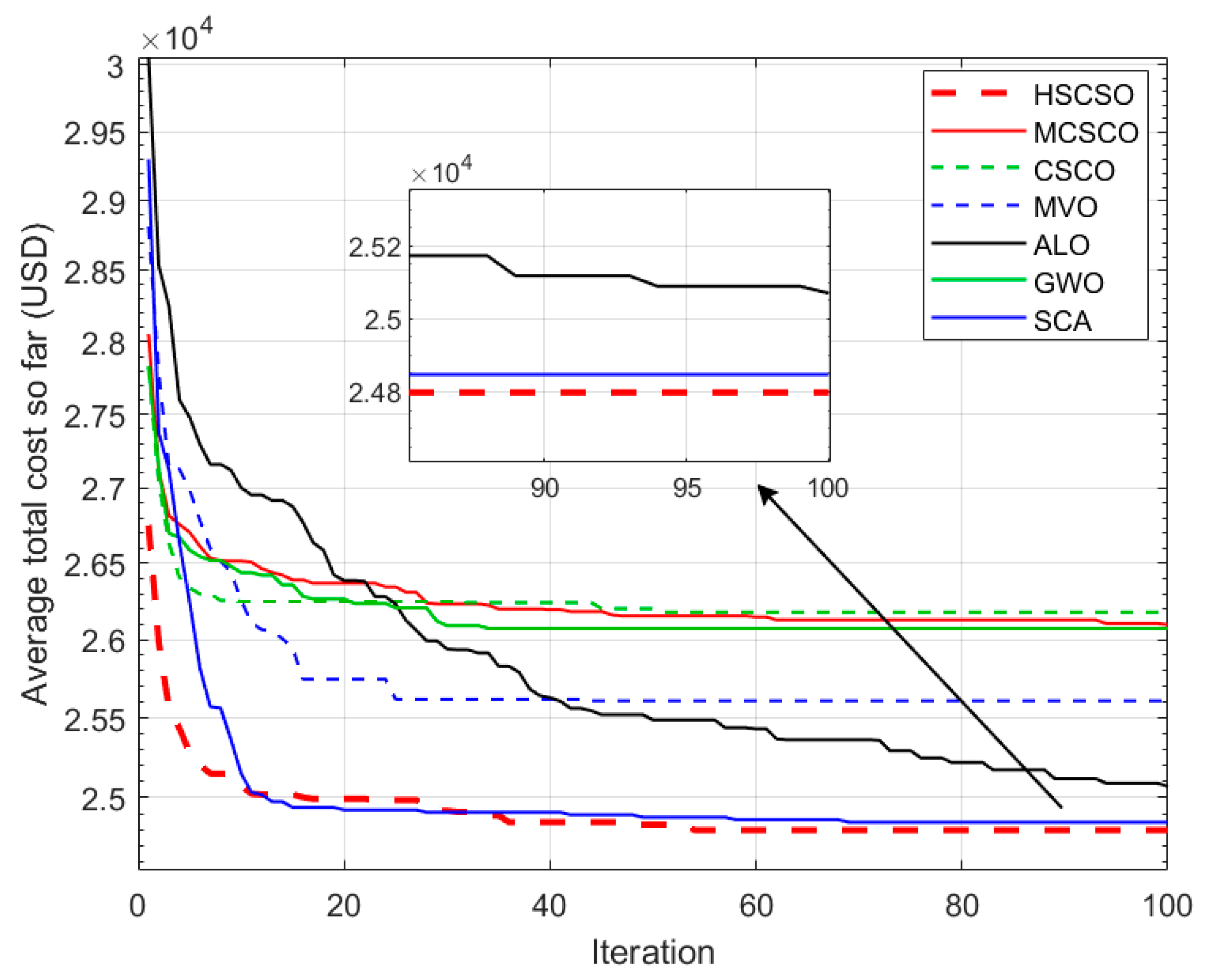
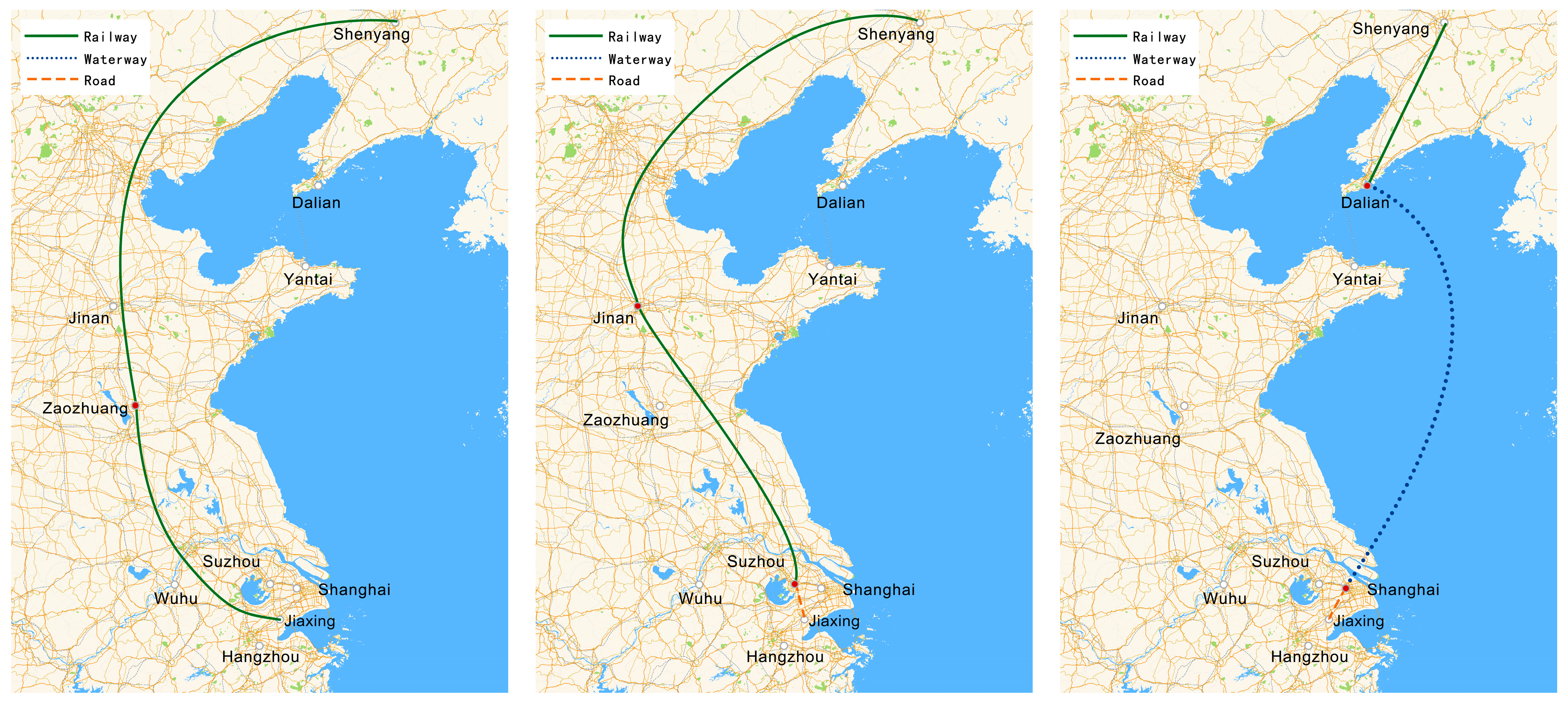
6.2. Analysis of Experimental Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Beškovnik, B.; Twrdy, E. Green logistics strategy for South East Europe: To improve intermodality and establish green transport corridors. Transport 2012, 27, 25–33. [Google Scholar] [CrossRef]
- Karam, A.; Jensen, A.J.K.; Hussein, M. Analysis of the barriers to multimodal freight transport and their mitigation strategies. Eur. Transp. Res. Rev. 2023, 15, 43. [Google Scholar] [CrossRef]
- Laurent, A.B.; Vallerand, S.; van der Meer, Y.; D’Amours, S. CarbonRoadMap: A multicriteria decision tool for multimodal transportation. Int. J. Sustain. Transp. 2020, 14, 205–214. [Google Scholar] [CrossRef]
- Liu, S. Multimodal transportation route optimization of cold chain container in time-varying network considering carbon emissions. Sustainability 2023, 15, 4435. [Google Scholar] [CrossRef]
- Bazaluk, O.; Kotenko, S.; Nitsenko, V. Entropy as an objective function of optimization multimodal transportations. Entropy 2021, 23, 946. [Google Scholar] [CrossRef]
- Hu, Z.A.; Cai, J.; Luo, H. Optimization of multimodal transportation routes under mixed uncertainties. J. Beijing Jiaotong Univ. 2023, 47, 32–40. [Google Scholar]
- Dorigo, M.; Caro, G.D. Ant colony optimization: A new meta-heuristic. In Proceedings of the 1999 Congress on Evolutionary Computation (CEC99), Washington, DC, USA, 6–9 July 1999; pp. 1470–1477. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Bertsimas, D.; Tsitsiklis, J. Simulated annealing. Stat. Sci. 1993, 8, 10–15. [Google Scholar]
- Holland, J.H. Genetic algorithms. Sci. Am. 1992, 267, 66–73. [Google Scholar] [CrossRef]
- Gendreau, M.; Potvin, J.Y. Tabu search. In Search Methodologies: Introductory Tutorials in Optimization and Decision Support Techniques; Springer: Berlin/Heidelberg, Germany, 2005; pp. 165–186. [Google Scholar]
- Piao, C.; Hu, H.; Zhang, Y. Logistics distribution vehicle path planning research. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Information Systems (ICAIIS), Dalian, China, 20–22 March 2020; pp. 396–399. [Google Scholar]
- Leng, K.; Li, S. Distribution path optimization for intelligent logistics vehicles of urban rail transportation using VRP optimization model. IEEE Trans. Intell. Transp. Syst. 2021, 23, 1661–1669. [Google Scholar] [CrossRef]
- SteadieSeifi, M.; Dellaert, N.; Van Woensel, T. Multi-modal transport of perishable products with demand uncertainty and empty repositioning: A scenario-based rolling horizon framework. EURO J. Transp. Logist. 2021, 10, 100044. [Google Scholar] [CrossRef]
- Kiani, F.; Seyyedabbasi, A.; Aliyev, R.; Shah, M.A.; Gulle, M.U. 3D path planning method for multi-UAVs inspired by grey wolf algorithms. J. Internet Technol. 2021, 22, 743–755. [Google Scholar] [CrossRef]
- Seyyedabbasi, A.; Kiani, F. Sand Cat swarm optimization: A nature-inspired algorithm to solve global optimization problems. Eng. Comput. 2023, 39, 2627–2651. [Google Scholar] [CrossRef]
- Adegboye, O.R.; Feda, A.K.; Ojekemi, O.R.; Agyekum, E.B.; Khan, B.; Kamel, S. DGS-SCSO: Enhancing Sand Cat Swarm Optimization with Dynamic Pinhole Imaging and Golden Sine Algorithm for improved numerical optimization performance. Sci. Rep. 2024, 14, 1491. [Google Scholar] [CrossRef]
- Kiani, F.; Nematzadeh, S.; Anka, F.A.; Findikli, M.A. Chaotic sand cat swarm optimization. Mathematics 2023, 11, 2340. [Google Scholar] [CrossRef]
- Lou, T.; Yue, Z.; Chen, Z.; Qi, R.; Li, G. A hybrid multi-strategy SCSO algorithm for robot path planning. Res. Sq. 2024; preprint. [Google Scholar] [CrossRef]
- Wu, D.; Rao, H.; Wen, C.; Jia, H.; Liu, Q.; Abualigah, L. Modified sand cat swarm optimization algorithm for solving constrained engineering optimization problems. Mathematics 2022, 10, 4350. [Google Scholar] [CrossRef]
- Erdelić, T.; Carić, T.; Erdelić, M.; Tišljarić, L.; Turković, A.; Jelušić, N. Estimating congestion zones and travel time indexes based on the floating car data. Comput. Environ. Urban Syst. 2021, 87, 101604. [Google Scholar] [CrossRef]
- He, F.; Yan, X.; Liu, Y.; Ma, L. A traffic congestion assessment method for urban road networks based on speed performance index. Procedia Eng. 2016, 137, 425–433. [Google Scholar] [CrossRef]
- Liu, X.; Chen, Y.L.; Por, L.Y.; Ku, C.S. A systematic literature review of vehicle routing problems with time windows. Sustainability 2023, 15, 12004. [Google Scholar] [CrossRef]
- Budiyanto, M.A.; Fernanda, H. Risk assessment of work accident in container terminals using the fault tree analysis method. J. Mar. Sci. Eng. 2020, 8, 466. [Google Scholar] [CrossRef]
- Yin, N. Multiobjective optimization for vehicle routing optimization problem in low-carbon intelligent transportation. IEEE Trans. Intell. Transp. Syst. 2022, 24, 13161–13170. [Google Scholar] [CrossRef]
- Demir, E.; Hrušovský, M.; Jammernegg, W.; Van Woensel, T. Green intermodal freight transportation: Bi-objective modelling and analysis. Int. J. Prod. Res. 2019, 57, 6162–6180. [Google Scholar] [CrossRef]
- Zhu, C.; Li, S.; Lu, Q. Pseudo-random number sequence generator based on chaotic logistic-tent system. In Proceedings of the 2019 IEEE 2nd International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 22–24 November 2019; pp. 547–551. [Google Scholar]
- Zhang, H.; Liu, F.; Zhou, Y.; Zhang, Z. A hybrid method integrating an elite genetic algorithm with tabu search for the quadratic assignment problem. Inf. Sci. 2020, 539, 347–374. [Google Scholar] [CrossRef]
- Yu, F.; Guan, J.; Wu, H.; Chen, Y.; Xia, X. Lens imaging opposition-based learning for differential evolution with cauchy perturbation. Appl. Soft Comput. 2024, 152, 111211. [Google Scholar] [CrossRef]
- Mirjalili, S.; Jangir, P.; Mirjalili, S.Z.; Saremi, S.; Trivedi, I.N. Optimization of problems with multiple objectives using the multi-verse optimization algorithm. Knowl. Based Syst. 2017, 134, 50–71. [Google Scholar] [CrossRef]
- Mirjalili, S. The ant lion optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Rizk-Allah, R.M.; Hassanien, A.E. A comprehensive survey on the sine–cosine optimization algorithm. Artif. Intell. Rev. 2023, 56, 4801–4858. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Definition | Domain | Minimum |
|---|---|---|---|
| Sphere | [−100, 100] | 0 | |
| Schwefel 2.22 | [−10, 10] | 0 | |
| Schwefel 1.2 | [−100, 100] | 0 | |
| Rosenbrock | [−30, 30] | 0 | |
| Step | [−100, 100] | 0 | |
| Rastrigin | [−5.12, 5.12] | 0 | |
| Ackley | [−32, 32] | 0 | |
| Griewank | [−600, 600] | 0 | |
| Penalized1 | [−50, 50] | 0 | |
| Penalized2 | [−50, 50] | 0 |
| MVO | ALO | SCA | SCSO | MSCSO | HSCSO |
|---|---|---|---|---|---|
| F | dim | Metric | MVO | ALO | SCA | GWO | CSCO | MSCSO | HSCSO |
|---|---|---|---|---|---|---|---|---|---|
| 30 | min | 2.6327 | 4.1823 | 8.0045 × 103 | 1.0344 × 10−17 | 2.2536 × 10−248 | 0 | 0 | |
| mean | 5.6327 | 258.3733 | 136.4308 | 1.3223 × 10−15 | 1.8527 × 10−183 | 0 | 0 | ||
| std | 1.9329 | 294.5664 | 230.9609 | 2.0616 × 10−15 | 0 | 0 | 0 | ||
| 100 | min | 460.4557 | 1.7996 × 104 | 893.2494 | 3.5353 × 10−8 | 8.1391 × 10−252 | 0 | 0 | |
| mean | 797.0433 | 3.8002 × 104 | 1.6369 × 104 | 6.3857 × 10−7 | 2.4626 × 10−186 | 0 | 0 | ||
| std | 178.2052 | 1.0709 × 104 | 1.1242 × 104 | 8.0299 × 10−7 | 0 | 0 | 0 | ||
| 30 | min | 0.8037 | 12.2256 | 5.4967 × 10−4 | 3.5132 × 10−11 | 7.0641 × 10−128 | 0 | 0 | |
| mean | 21.5927 | 87.1768 | 0.1127 | 5.3524 × 10−10 | 2.6198 × 10−101 | 0 | 0 | ||
| std | 35.4733 | 46.8098 | 0.18727 | 4.1349 × 10−10 | 2.6112 × 10−100 | 0 | 0 | ||
| 100 | min | 2.1626 × 104 | 99.8106 | 0.5031 | 2.2138 × 10−5 | 9.3442 × 10−133 | 0 | 0 | |
| mean | 9.8551 × 1033 | 1.0053 × 1039 | 11.8113 | 7.0761 × 10−5 | 7.7748 × 10−101 | 0 | 0 | ||
| std | 9.8550 × 1034 | 1.005 × 1040 | 9.0156 | 2.8239 × 10−5 | 5.9144 × 10−100 | 0 | 0 | ||
| 30 | min | 505.6024 | 6.5421 × 103 | 2.9688 × 103 | 1.1846 × 10−4 | 4.9008 × 10−218 | 0 | 0 | |
| mean | 1.6749 × 103 | 2.1478 × 104 | 1.6678 × 104 | 0.31494 | 1.4011 × 10−113 | 0 | 0 | ||
| std | 627.0235 | 7.1650 × 103 | 9.2015 × 103 | 0.70297 | 1.3405 × 10−112 | 0 | 0 | ||
| 100 | min | 8.0640 × 104 | 1.2447 × 105 | 1.4818 × 105 | 486.0576 | 1.544 × 10−217 | 0 | 0 | |
| mean | 1.0594 × 105 | 2.5221 × 105 | 3.1412 × 105 | 5.8055 × 103 | 2.2715 × 10−101 | 0 | 0 | ||
| std | 1.2983 × 104 | 8.6313 × 104 | 1.0087 × 104 | 4.2713 × 103 | 2.2592 × 10−100 | 0 | 0 | ||
| 30 | min | 63.4226 | 702.8128 | 276.6508 | 26.4809 | 28.7114 | 25.4941 | 28.7128 | |
| mean | 823.1095 | 5.3803 × 104 | 6.6770 × 105 | 28.1834 | 28.7411 | 27.956 | 28.7388 | ||
| std | 868.9818 | 7.2946 × 104 | 8.0540 × 105 | 0.6845 | 0.0201 | 1.1103 | 0.0191 | ||
| 100 | min | 3.5548 × 104 | 4.9803 × 106 | 5.2962 × 107 | 97.5900 | 98.0808 | 98.0642 | 97.0305 | |
| mean | 7.6548 × 104 | 2.5937 × 107 | 1.5968 × 108 | 98.4024 | 98.1361 | 98.2444 | 98.1313 | ||
| std | 3.9204 × 104 | 1.9097 × 107 | 5.0095 × 107 | 0.3076 | 0.0588 | 0.4850 | 0.0308 | ||
| 30 | min | 1.4699 | 3.1114 | 5.2411 | 1.0104 | 0.066901 | 0.75081 | 0.40856 | |
| mean | 5.1007 | 319.1395 | 113.9063 | 2.1401 | 0.79039 | 2.0531 | 0.93118 | ||
| std | 1.9181 | 394.3906 | 188.4741 | 0.67296 | 0.42361 | 0.64171 | 0.41159 | ||
| 100 | min | 472.9413 | 2.6769 × 104 | 956.6184 | 13.0826 | 0.35754 | 10.2747 | 1.4734 | |
| mean | 791.0462 | 3.9654 × 104 | 1.4741 × 104 | 14.7925 | 2.9234 | 12.7907 | 3.6416 | ||
| std | 151.679 | 1.1052 × 104 | 1.0678 × 104 | 1.0674 | 1.9161 | 1.6529 | 1.6461 | ||
| 30 | min | 88.8812 | 69.1000 | 2.6361 | 1.1369 × 10−12 | 0 | 0 | 0 | |
| mean | 143.2612 | 112.1747 | 48.2967 | 6.4814 | 0 | 0 | 0 | ||
| std | 48.8568 | 35.4216 | 34.116 | 5.348 | 0 | 0 | 0 | ||
| 100 | min | 796.119 | 502.3162 | 14.6396 | 1.2694 | 0 | 0 | 0 | |
| mean | 867.7466 | 611.9887 | 287.2088 | 17.2046 | 0 | 0 | 0 | ||
| std | 63.5966 | 54.2964 | 183.9506 | 8.7552 | 0 | 0 | 0 | ||
| 30 | min | 2.2158 | 12.7360 | 0.0779 | 1.9888 × 10−9 | 8.8818 × 10−16 | 8.8818 × 10−16 | 8.8818 × 10−16 | |
| mean | 6.2317 | 14.3402 | 14.5179 | 6.1417 × 10−9 | 8.8818 × 10−16 | 8.8818 × 10−16 | 8.8818 × 10−16 | ||
| std | 7.1265 | 0.97594 | 9.2236 | 2.8557 × 10−9 | 0 | 0 | 0 | ||
| 100 | min | 7.7321 | 15.5835 | 11.0415 | 2.8547 × 10−5 | 8.8818 × 10−16 | 8.8818 × 10−16 | 8.8818 × 10−16 | |
| mean | 16.9565 | 17.3066 | 19.6645 | 6.3974 × 10−5 | 8.8818 × 10−16 | 8.8818 × 10−16 | 8.8818 × 10−16 | ||
| std | 5.364 | 0.83899 | 2.6609 | 2.8386 × 10−5 | 0 | 0 | 0 | ||
| 30 | min | 0.9849 | 0.6732 | 0.2687 | 6.6613 × 10−16 | 0 | 0 | 0 | |
| mean | 1.0465 | 3.4857 | 2.3300 | 7.4984 × 10−3 | 0 | 0 | 0 | ||
| std | 0.0185 | 3.2639 | 2.3699 | 0.0139 | 0 | 0 | 0 | ||
| 100 | min | 5.1622 | 183.2745 | 21.3508 | 9.4346 × 10−8 | 0 | 0 | 0 | |
| mean | 7.8152 | 319.6928 | 141.5934 | 8.1156 × 10−3 | 0 | 0 | 0 | ||
| std | 1.4993 | 90.3641 | 73.8455 | 0.019983 | 0 | 0 | 0 | ||
| 30 | min | 1.0553 | 17.0249 | 2.0016 | 0.0649 | 5.4982 × 103 | 0.0331 | 0.0105 | |
| mean | 3.8506 | 44.3055 | 7.8375 × 103 | 0.1473 | 0.0940 | 0.0961 | 0.0720 | ||
| std | 2.0859 | 37.0166 | 1.8027 × 106 | 0.0508 | 0.0883 | 0.0526 | 0.0376 | ||
| 100 | min | 40.7512 | 2.3486 × 106 | 2.1018 × 108 | 0.4242 | 5.3339 × 10−3 | 0.2921 | 0.0354 | |
| mean | 81.8626 | 7.2860 × 106 | 5.0499 × 108 | 0.5669 | 0.0742 | 0.3401 | 0.0669 | ||
| std | 81.212 | 5.8398 × 106 | 2.6286 × 108 | 0.1115 | 0.0822 | 0.0475 | 0.0468 | ||
| 30 | min | 0.2221 | 44.8919 | 6.0175 | 0.9367 | 0.1947 | 0.7742 | 0.1554 | |
| mean | 1.6994 | 7.0403 × 103 | 7.2616 × 106 | 1.5452 | 0.5996 | 2.1864 | 0.3125 | ||
| std | 3.4993 | 1.8794 × 104 | 2.0141 × 107 | 0.3257 | 0.2740 | 0.5419 | 0.1160 | ||
| 100 | min | 471.4806 | 1.1867 × 107 | 2.1041 × 108 | 7.4330 | 0.8835 | 8.8439 | 0.4735 | |
| mean | 4.1520 × 103 | 3.6382 × 107 | 7.8370 × 108 | 8.2103 | 1.6202 | 9.7341 | 1.0788 | ||
| std | 3.6812 × 103 | 1.8635 × 107 | 3.6168 × 108 | 0.4953 | 0.6911 | 0.1228 | 0.2606 |
| Mode | Speed | Damage Rate | Cost | |
|---|---|---|---|---|
| 0–500 km | Over 500 km | |||
| Road | 80 km/h | 4.0 × 10−7 | 0.141 USD/km | 0.127 USD/km |
| Railway | 100 km/h | 2.0 × 10−7 | 0.113 USD/km | 0.099 USD/km |
| Waterway | 30 km/h | 3.0 × 10−7 | 0.085 USD/km | 0.071 USD/km |
| Modes | Cost | Carbon Emissions | Damage Rate |
|---|---|---|---|
| Road ↔ Railway | 19.75 USD/vehicle | 1.2 kg/vehicle | 2.0 × 10−5 |
| Road ↔ Waterway | 33.86 USD/vehicle | 2.4 kg/vehicle | 3.5 × 10−5 |
| Railway ↔ Waterway | 42.32 USD/vehicle | 4.5 kg/vehicle | 1.5 × 10−5 |
| Algorithm | Path | Modes | Min Cost (USD) | Mean Cost (USD) | Std Cost (USD) |
|---|---|---|---|---|---|
| HSCSO | Shenyang–Dalian –Shanghai–Jiaxing | Railway–Waterway –Road | 24,054.0 | 24,797.9 | 650.8 |
| MSCSO | Shenyang–Dalian –Shanghai–Jiaxing | Railway–Waterway –Road | 24,054.0 | 26,097.6 | 1610.2 |
| SCSO | Shenyang–Jinan –Suzhou–Jiaxing | Railway–Railway –Road | 24,441.9 | 26,179.6 | 1495.3 |
| MVO | Shenyang–Zaozhuang –Jiaxing | Railway–Railway | 24,533.5 | 25,895.0 | 1467.2 |
| ALO | Shenyang–Dalian –Shanghai–Jiaxing | Railway–Waterway –Road | 24,054.0 | 25,069.4 | 731.3 |
| GWO | Shenyang–Jinan –Suzhou–Jiaxing | Railway–Railway –Road | 24,441.9 | 26,562.4 | 1507.1 |
| SCA | Shenyang–Zaozhuang –Jiaxing | Railway–Railway | 24,533.5 | 24,846.6 | 908.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Yang, Q.; Liu, J.; Zhang, X.; Sun, Z. A Path Planning Method Based on Hybrid Sand Cat Swarm Optimization Algorithm of Green Multimodal Transportation. Appl. Sci. 2024, 14, 8024. https://doi.org/10.3390/app14178024
Sun Z, Yang Q, Liu J, Zhang X, Sun Z. A Path Planning Method Based on Hybrid Sand Cat Swarm Optimization Algorithm of Green Multimodal Transportation. Applied Sciences. 2024; 14(17):8024. https://doi.org/10.3390/app14178024
Chicago/Turabian StyleSun, Zhe, Qiming Yang, Junyi Liu, Xu Zhang, and Zhixin Sun. 2024. "A Path Planning Method Based on Hybrid Sand Cat Swarm Optimization Algorithm of Green Multimodal Transportation" Applied Sciences 14, no. 17: 8024. https://doi.org/10.3390/app14178024
APA StyleSun, Z., Yang, Q., Liu, J., Zhang, X., & Sun, Z. (2024). A Path Planning Method Based on Hybrid Sand Cat Swarm Optimization Algorithm of Green Multimodal Transportation. Applied Sciences, 14(17), 8024. https://doi.org/10.3390/app14178024