
Feasibility of Identifying Shale Sweet Spots by Downhole Microseismic Imaging


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Data and Methods
| Algorithm 1 Workflow of the alternating inversion. |
|
Step 1: Initialize P-wave velocity and Poisson’s ratio . Step 2: Setup survey geometry and record arrival time data. for each iteration from 1 to MaxLoops do Step 3: Conduct a 3D grid search for event locations X. Step 4: Compute origin times using Equation (3). Step 5: Calculate traveltimes using Equation (4). Step 6: Update and based on traveltime tomography. if termination criteria are met then Step 7: Return results X, , and and stop. end if end for |
3. Results
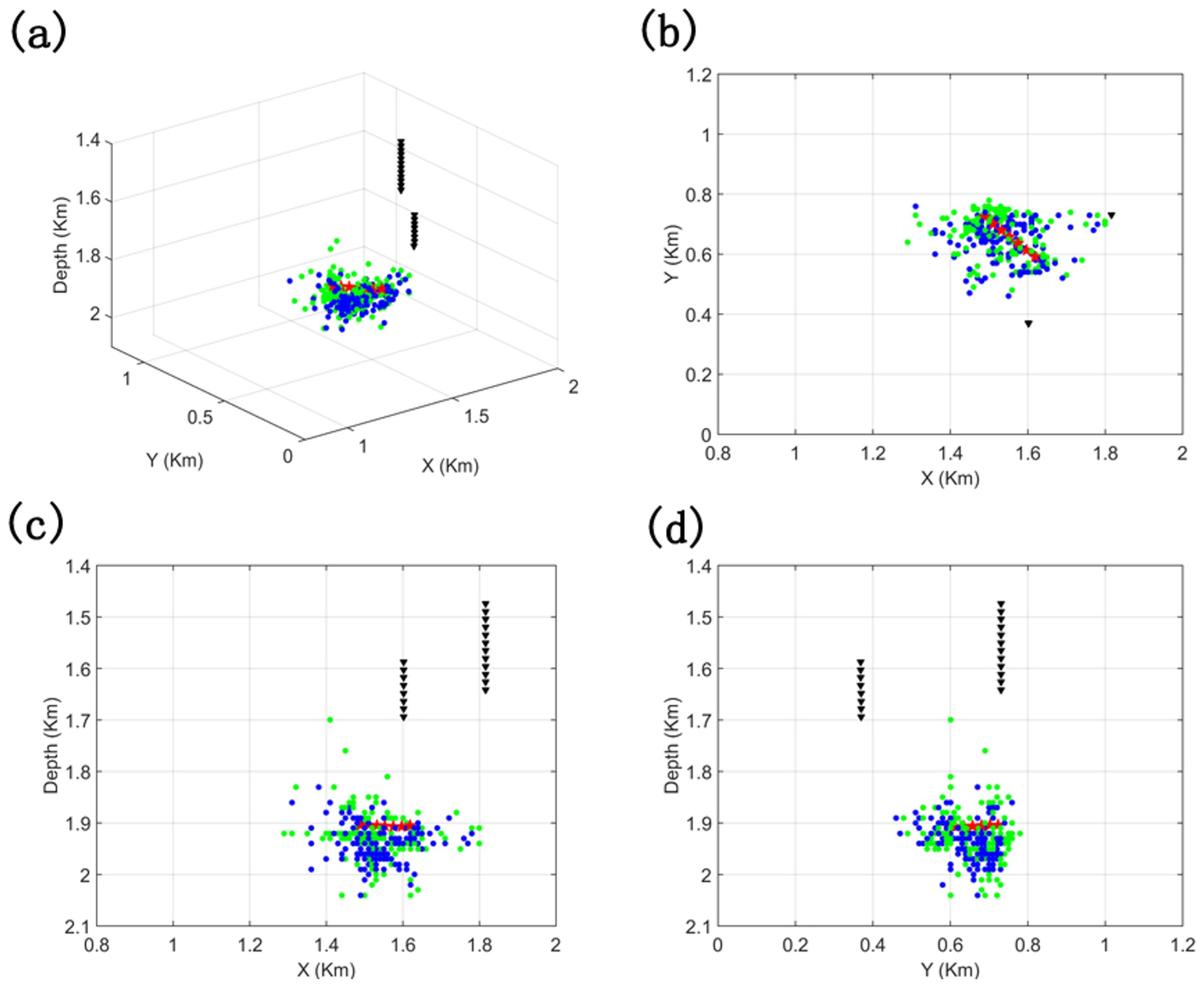
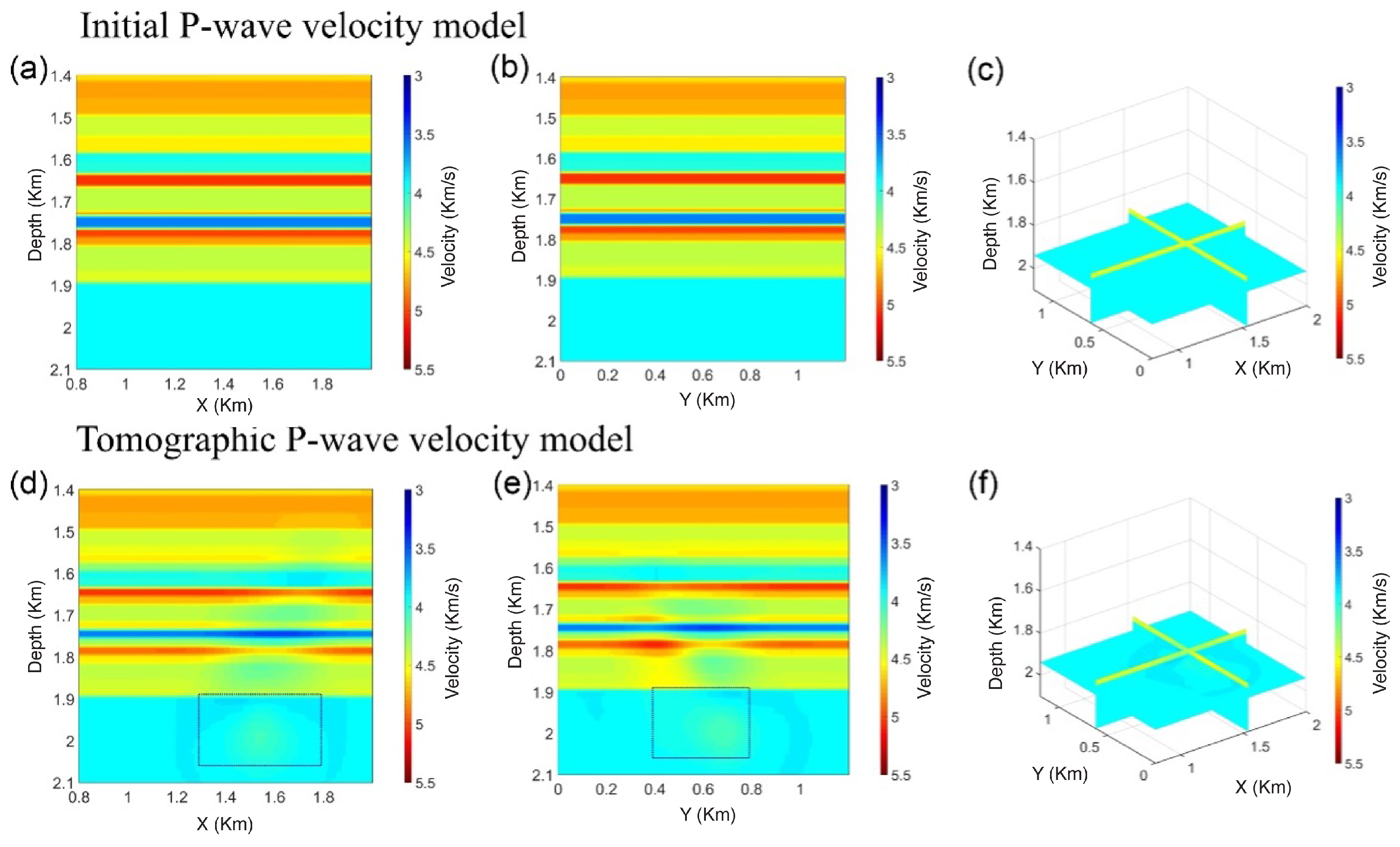
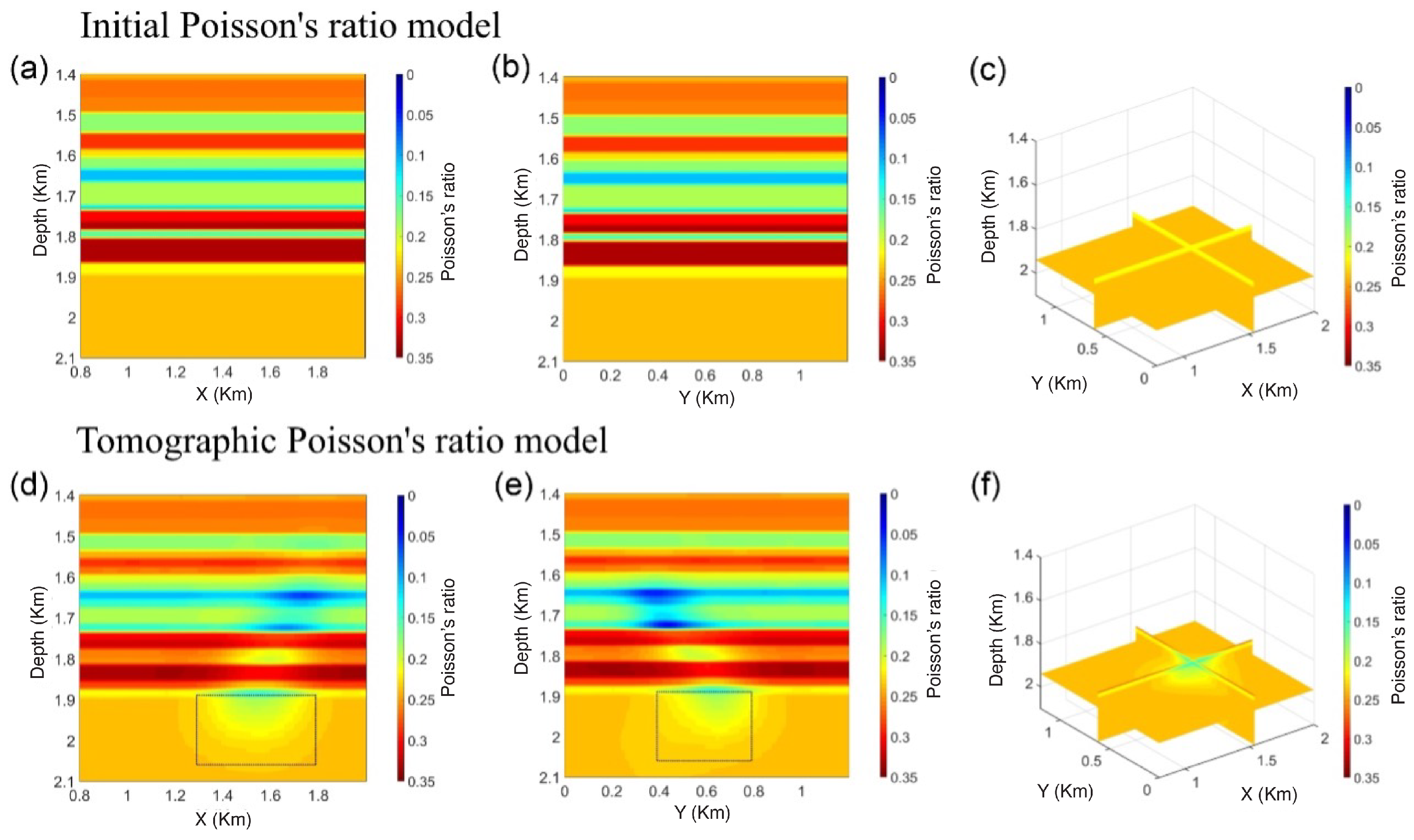
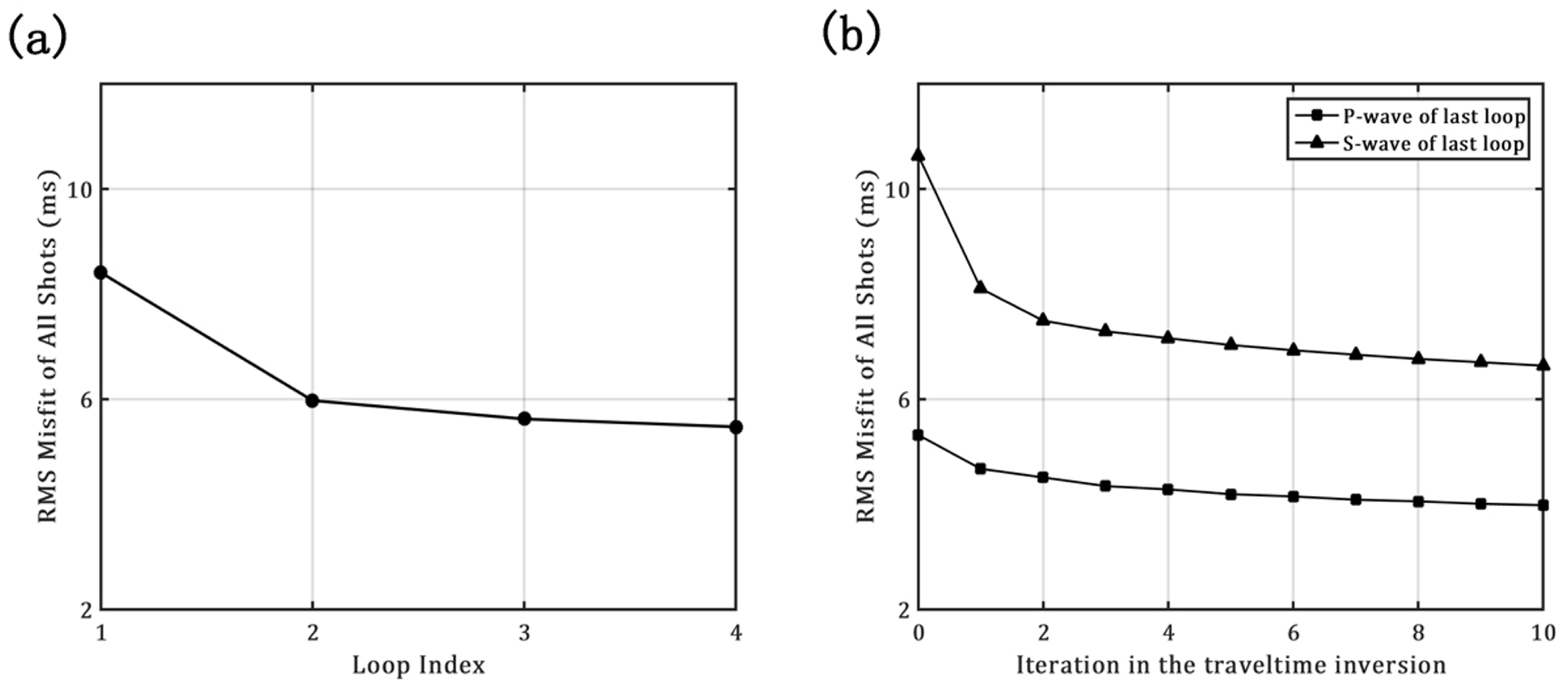
3.1. Synthetic Example
3.2. Field Example
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schenk, C.J. Geologic definition of conventional and continuous accumulations in select US basins—The 2001 approach. In Proceedings of the Abstract for AAPG Hedberg Research Conference on Understanding, Exploring and Developing Tight Gas Sands, Vail, CO, USA, 24–29 April 2005. [Google Scholar]
- Norton, M.; Hovdebo, W.; Cho, D.; Maxwell, S.; Jones, M. Integration of surface seismic and microseismic for the characterization of a shale gas reservoir. CSEG Rec. 2011, 34, 31–33. [Google Scholar]
- Holbrook, W.S.; Gajewski, D.; Krammer, A.; Prodehl, C. An interpretation of wide-angle compressional and shear wave data in southwest Germany: Poisson’s ratio and petrological implications. J. Geophys. Res. Solid Earth 1988, 93, 12081–12106. [Google Scholar] [CrossRef]
- Ikwuakor, K.C. The Vp/Vs ratio after 40 years: Uses and abuses. In Proceedings of the SEG International Exposition and Annual Meeting, SEG–2006, New Orleans, LA, USA, 1–6 October 2006. [Google Scholar]
- McCormack, M.; Justice, M.; Sharp, W. A Stratigraphic Interpretation of Shear and Compressional Wave Seismic Data for the Pennsylvanian Morrow Formation of Southeastern New Mexico: Chapter 13. AAPG Spec. Vol. 1985, 225–239. [Google Scholar]
- Tatham, R.H. V p/V s and lithology. Geophysics 1982, 47, 336–344. [Google Scholar] [CrossRef]
- Anderson, P.F. A Comparison of Inversion Techniques for Estimating Vp/Vs from 3-C 3-D Seismic Data. Proc. Masters Abstr. Int. 2010, 49, 3. [Google Scholar]
- Goodway, B.; Chen, T.; Downton, J. Improved AVO fluid detection and lithology discrimination using Lamé petrophysical parameters;“λρ”,“μρ”, & “λ/μ fluid stack”, from P and S inversions. In SEG Technical Program Expanded Abstracts 1997; Society of Exploration Geophysicists: Houston, TX, USA, 1997; pp. 183–186. [Google Scholar]
- Hampson, D.P.; Russell, B.H.; Bankhead, B. Simultaneous inversion of pre-stack seismic data. In SEG Technical Program Expanded Abstracts 2005; Society of Exploration Geophysicists: Houston, TX, USA, 2005; pp. 1633–1637. [Google Scholar]
- Martakis, N.; Tselentis, A.; Kapotas, S.; Karageorgi, E. Passive Seismic Tomography a Complementary Geophysical Method–Successful Case Study. In Proceedings of the 65th EAGE Conference & Exhibition, European Association of Geoscientists & Engineers, Stavanger, Norway, 2–5 June 2003; p. cp-6-00074. [Google Scholar]
- Martakis, N.; Kapotas, S.; Tselentis, G. Integrated passive seismic acquisition and methodology. Case Studies. Geophys. Prospect. 2006, 54, 829–847. [Google Scholar] [CrossRef]
- Thurber, C.H.; Atre, S.R.; Eberhart-Phillips, D. Three-dimensional Vp and Vp/Vs structure at Loma Prieta, California, from local earthquake tomography. Geophys. Res. Lett. 1995, 22, 3079–3082. [Google Scholar] [CrossRef]
- Eberhart-Phillips, D.; Michael, A.J. Seismotectonics of the Loma Prieta, California, region determined from three-dimensional V p, V p/V s, and seismicity. J. Geophys. Res. Solid Earth 1998, 103, 21099–21120. [Google Scholar] [CrossRef]
- Chiarabba, C.; Amato, A. Vp and Vp/Vs images in the Mw 6.0 Colfiorito fault region (central Italy): A contribution to the understanding of seismotectonic and seismogenic processes. J. Geophys. Res. Solid Earth 2003, 108, B5. [Google Scholar] [CrossRef]
- Thurber, C.H. Analysis methods for kinematic data from local earthquakes. Rev. Geophys. 1986, 24, 793–805. [Google Scholar] [CrossRef]
- Kissling, E. Geotomography with local earthquake data. Rev. Geophys. 1988, 26, 659–698. [Google Scholar] [CrossRef]
- Iyer, H.; Hirahara, K. Seismic Tomography: Theory and Practice; Springer Science & Business Media: Berlin, Germany, 1993. [Google Scholar]
- Rutledge, J.T.; Phillips, W.S. Hydraulic stimulation of natural fractures as revealed by induced microearthquakes, Carthage Cotton Valley gas field, east Texas. Geophysics 2003, 68, 441–452. [Google Scholar] [CrossRef]
- Maxwell, S.C.; Urbancic, T.I. The role of passive microseismic monitoring in the instrumented oil field. Lead. Edge 2001, 20, 636–639. [Google Scholar] [CrossRef]
- Treadgold, G.; Campbell, B.; McLain, B.; Sinclair, S.; Nicklin, D. Eagle Ford shale prospecting with 3D seismic data within a tectonic and depositional system framework. The Leading Edge 2011, 30, 48–53. [Google Scholar] [CrossRef]
- Valoroso, L.; Improta, L.; De Gori, P.; Di Stefano, R.; Chiaraluce, L. From 3D to 4D Passive Seismic Tomography-The Sub-surface Structure Imaging of the Val d’Agri Region, Southern Italy. In Proceedings of the 70th EAGE Conference and Exhibition incorporating SPE EUROPEC 2008, European Association of Geoscientists & Engineers, Rome, Italy, 9–12 June 2008; p. cp-40-00309. [Google Scholar]
- Zhang, H.; Thurber, C.; Bedrosian, P. Joint inversion for vp, vs, and vp/vs at SAFOD, Parkfield, California. Geochem. Geophys. Geosyst. 2009, 10. [Google Scholar] [CrossRef]
- Tselentis, G.A.; Martakis, N.; Paraskevopoulos, P.; Lois, A. High-resolution passive seismic tomography for 3D velocity, Poisson’s ratio ν, and P-wave quality QP in the Delvina hydrocarbon field, southern Albania. Geophysics 2011, 76, B89–B112. [Google Scholar] [CrossRef]
- Barthwal, H.; van der Baan, M. Passive seismic tomography using recorded microseismicity. In Proceedings of the SEG International Exposition and Annual Meeting, SEG–2014, Denver, CO, USA, 26–31 October 2014. [Google Scholar]
- Chatterjee, S.; Pitt, A.; Iyer, H. Vp/Vs ratios in the Yellowstone national park region, Wyoming. J. Volcanol. Geotherm. Res. 1985, 26, 213–230. [Google Scholar] [CrossRef]
- Julian, B.; Ross, A.; Foulger, G.; Evans, J. Three-dimensional seismic image of a geothermal reservoir: The Geysers, California. Geophys. Res. Lett. 1996, 23, 685–688. [Google Scholar] [CrossRef]
- Lees, J.M.; Wu, H. Poisson’s ratio and porosity at Coso geothermal area, California. J. Volcanol. Geotherm. Res. 2000, 95, 157–173. [Google Scholar] [CrossRef]
- Lees, J.M. Three-dimensional anatomy of a geothermal field, Coso, southeast-central California. Geol. Soc. Am. Mem. 2002, 195, 259–276. [Google Scholar]
- Hauksson, E.; Unruh, J. Regional tectonics of the Coso geothermal area along the intracontinental plate boundary in central eastern California: Three-dimensional Vp and Vp/Vs models, spatial-temporal seismicity patterns, and seismogenic deformation. J. Geophys. Res. Solid Earth 2007, 112, B6. [Google Scholar] [CrossRef]
- Kummerow, J.; Reshetnikov, A.; Hring, M.; Asanuma, H. Distribution of the Vp/Vs ratio within the Basel 1 geothermal reservoir from microseismic data. In Proceedings of the 74th EAGE Conference and Exhibition incorporating EUROPEC 2012, European Association of Geoscientists & Engineers, Copenhagen, Denmark, 4–7 June 2012; p. cp-293-00092. [Google Scholar]
- Zang, A.; Oye, V.; Jousset, P.; Deichmann, N.; Gritto, R.; McGarr, A.; Majer, E.; Bruhn, D. Analysis of induced seismicity in geothermal reservoirs—An overview. Geothermics 2014, 52, 6–21. [Google Scholar] [CrossRef]
- Maxwell, S. Microseismic location uncertainty. CSEG Rec. 2009, 34, 41–46. [Google Scholar]
- Thurber, C.H. Hypocenter-velocity structure coupling in local earthquake tomography. Phys. Earth Planet. Inter. 1992, 75, 55–62. [Google Scholar] [CrossRef]
- Thurber, C.; Eberhart-Phillips, D. Local earthquake tomography with flexible gridding. Comput. Geosci. 1999, 25, 809–818. [Google Scholar] [CrossRef]
- Concha, D.; Fehler, M.; Zhang, H.; Wang, P. Imaging of the Soultz enhanced geothermal reservoir using microseismic data. In Proceedings of the Thirty-Fifth Workshop on Geothermal Reservoir Engineering Stanford University, Stanford, CA, USA, 1–3 February 2010. [Google Scholar]
- Jansky, J.; Plicka, V.; Eisner, L. Feasibility of joint 1D velocity model and event location inversion by the neighbourhood algorithm. Geophys. Prospect. 2010, 58, 229–234. [Google Scholar] [CrossRef]
- Zhou, R.; Huang, L.; Rutledge, J. Microseismic event location for monitoring CO2 injection using double-difference tomography. Lead. Edge 2010, 29, 208–214. [Google Scholar] [CrossRef]
- Rodi, W.; Toksöz, M.N. Grid-search techniques for seismic event location. In Proceedings of the 22nd Annual DoD/DOE Seismic Research Symposium: Planning for Verification of and Compliance with the Comprehensive Nuclear-Test-Ban Treaty, Defense Threat Reduction Agency, Dulles, Virginia, 1 August 2000. [Google Scholar]
- Eberhart-Phillips, D. Three-dimensional P and S velocity structure in the Coalinga region, California. J. Geophys. Res. Solid Earth 1990, 95, 15343–15363. [Google Scholar] [CrossRef]
- Aldridge, D.F.; Bartel, L.C.; Symons, N.P.; Warpinski, N.R. Grid search algorithm for 3D seismic source location. In Proceedings of the SEG International Exposition and Annual Meeting, SEG–2003, Dallas, TX, USA, 26–31 October 2003. [Google Scholar]
- Sethian, J.A.; Popovici, A.M. 3-D traveltime computation using the fast marching method. Geophysics 1999, 64, 516–523. [Google Scholar] [CrossRef]
- Nolet, G. Waveform tomography. In Seismic Tomography: With Applications in Global Seismology and Exploration Geophysics; Springer: Berlin, Germany, 1987; pp. 301–322. [Google Scholar]
- Kuang, W.; Zoback, M.; Zhang, J. Estimating geomechanical parameters from microseismic plane focal mechanisms recorded during multistage hydraulic fracturing. Geophysics 2017, 82, KS1–KS11. [Google Scholar] [CrossRef]
- Nicholson, C.; Simpson, D.W. Changes in Vp/Vs with depth: Implications for appropriate velocity models, improved earthquake locations, and material properties of the upper crust. Bull. Seismol. Soc. Am. 1985, 75, 1105–1123. [Google Scholar]
- Nakamura, M.; Yoshida, Y.; Zhao, D.; Katao, H.; Nishimura, S. Three-dimensional P-and S-wave velocity structures beneath the Ryukyu arc. Tectonophysics 2003, 369, 121–143. [Google Scholar] [CrossRef]
- Kokkinos, N.; Nkagbu, D.; Marmanis, D.; Dermentzis, K.; Maliaris, G. Evolution of Unconventional Hydrocarbons: Past, Present, Future and Environmental FootPrint. J. Eng. Sci. Technol. Rev. 2022, 15, 15–24. [Google Scholar] [CrossRef]
- Sharmin, T.; Khan, N.R.; Akram, M.S.; Ehsan, M.M. A state-of-the-art review on geothermal energy extraction, utilization, and improvement strategies: Conventional, hybridized, and enhanced geothermal systems. Int. J. Thermofluids 2023, 18, 100323. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, C.; Zhang, J. Feasibility of Identifying Shale Sweet Spots by Downhole Microseismic Imaging. Appl. Sci. 2024, 14, 8056. https://doi.org/10.3390/app14178056
Yuan C, Zhang J. Feasibility of Identifying Shale Sweet Spots by Downhole Microseismic Imaging. Applied Sciences. 2024; 14(17):8056. https://doi.org/10.3390/app14178056
Chicago/Turabian StyleYuan, Congcong, and Jie Zhang. 2024. "Feasibility of Identifying Shale Sweet Spots by Downhole Microseismic Imaging" Applied Sciences 14, no. 17: 8056. https://doi.org/10.3390/app14178056
APA StyleYuan, C., & Zhang, J. (2024). Feasibility of Identifying Shale Sweet Spots by Downhole Microseismic Imaging. Applied Sciences, 14(17), 8056. https://doi.org/10.3390/app14178056