


Levitating Control System of Maglev Ruler Based on Active Disturbance Rejection Controller

Abstract
:1. Introduction
2. Analysis Model of Levitating Force
2.1. Magnetic Potential Calculation and Leakage Coefficient
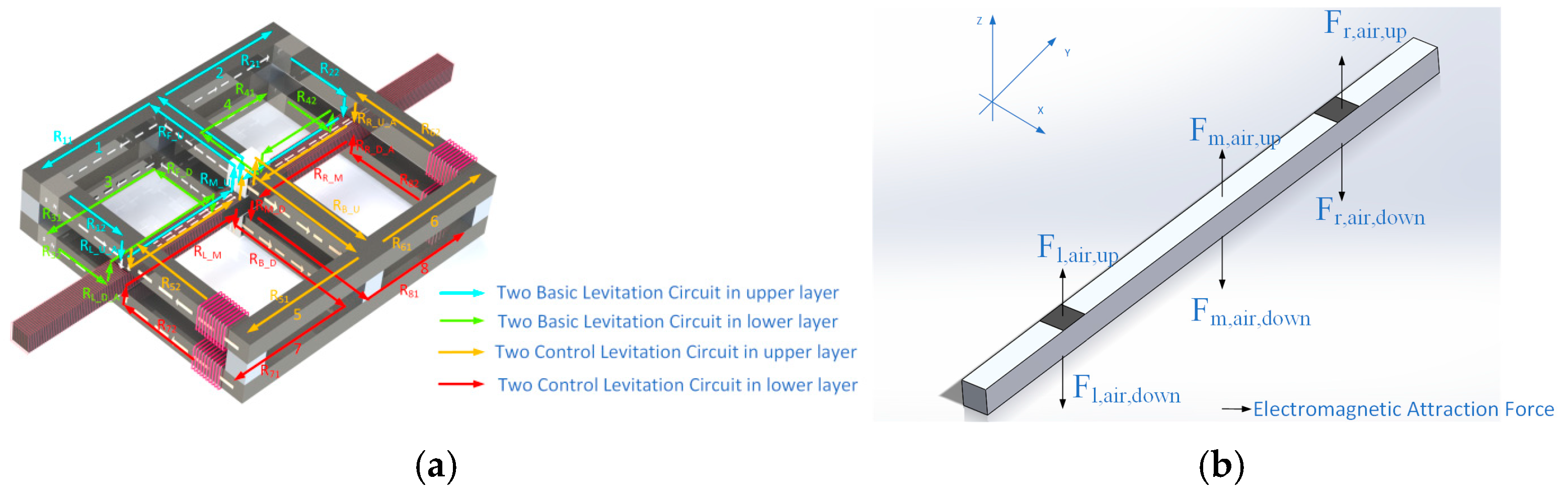
2.2. Analysis Model of Buoyancy Force
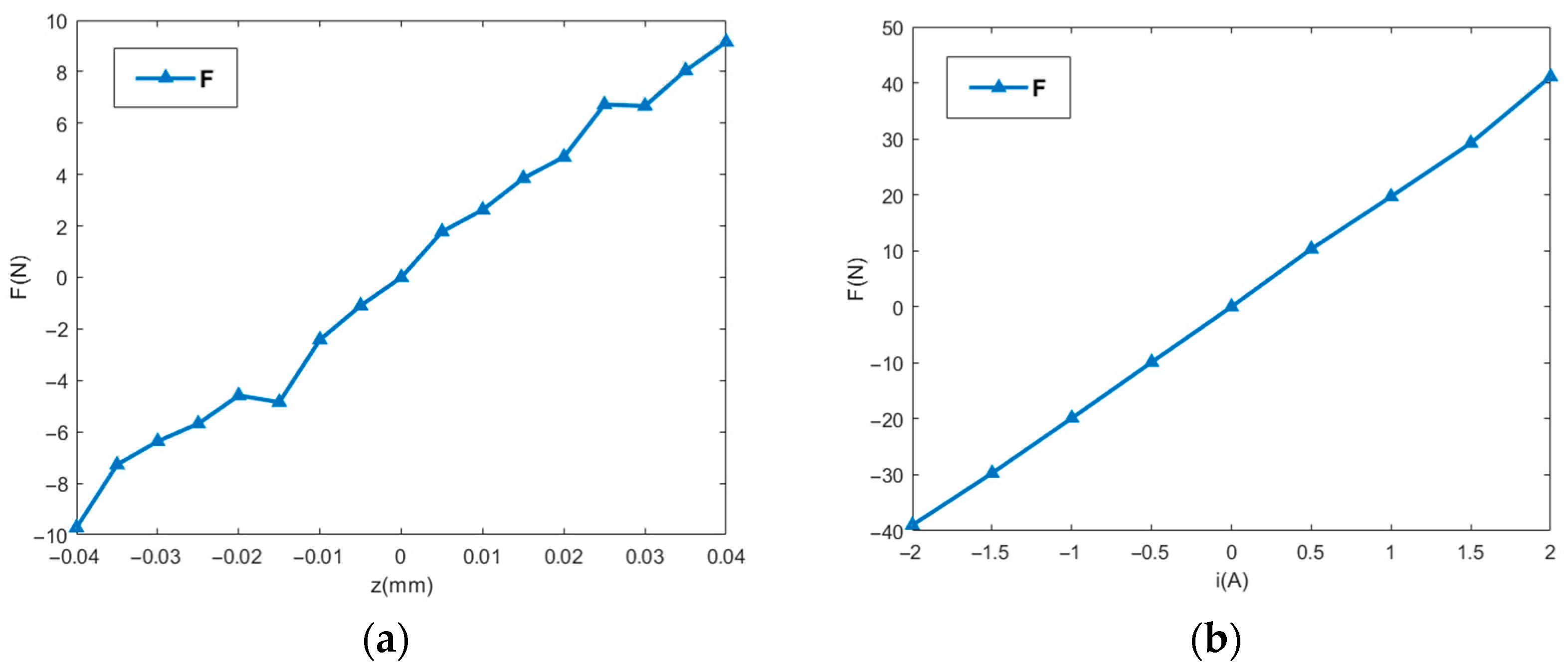
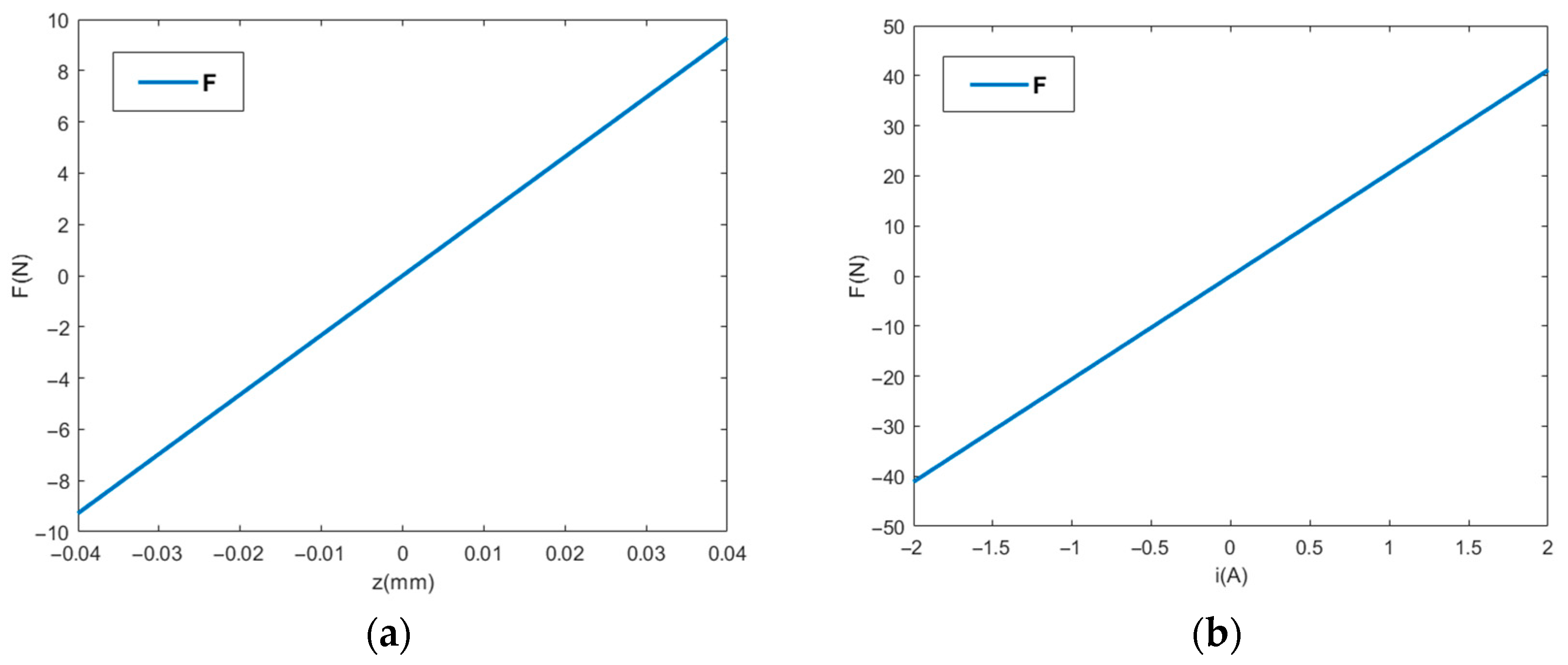
2.3. The Correlation between the Levitating Force and the Levitating Position of the MC
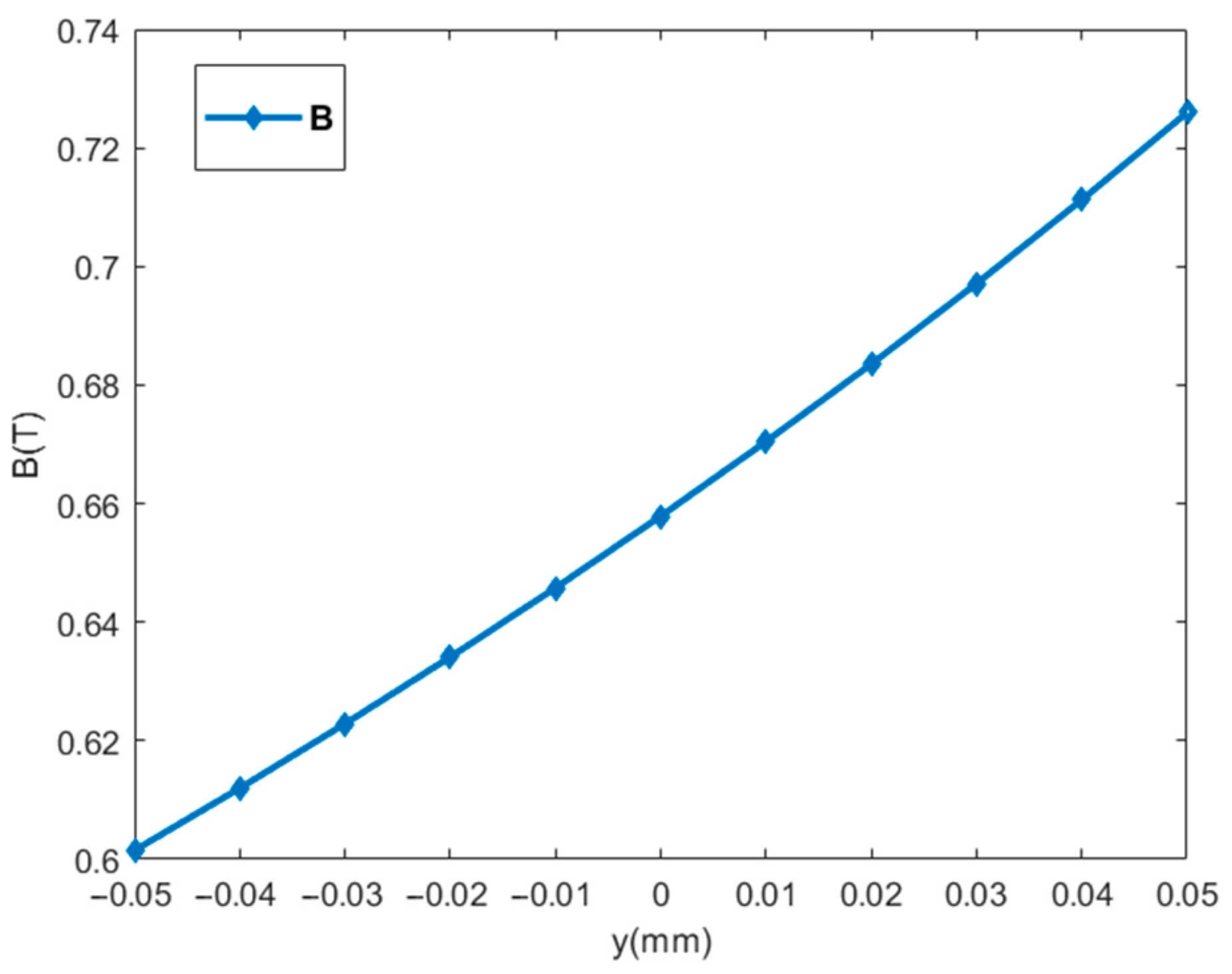
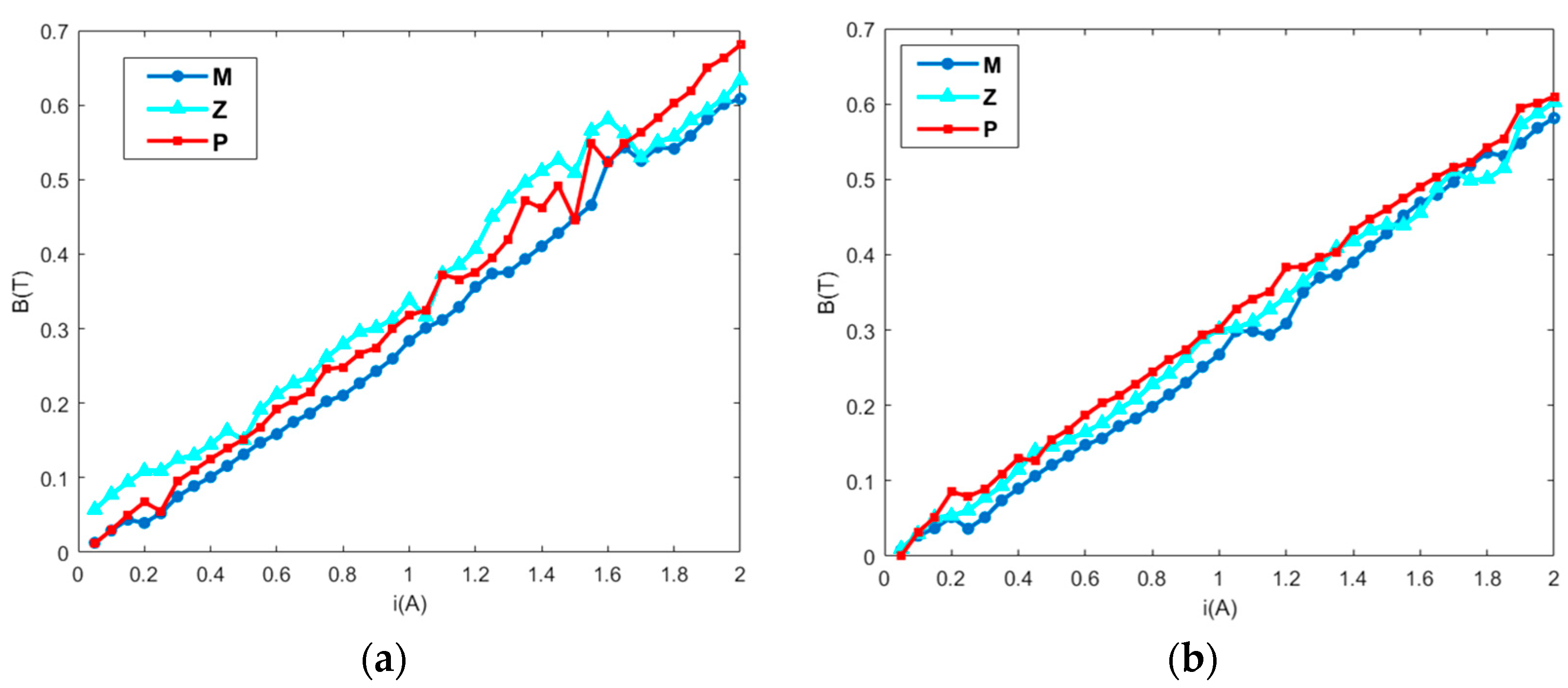
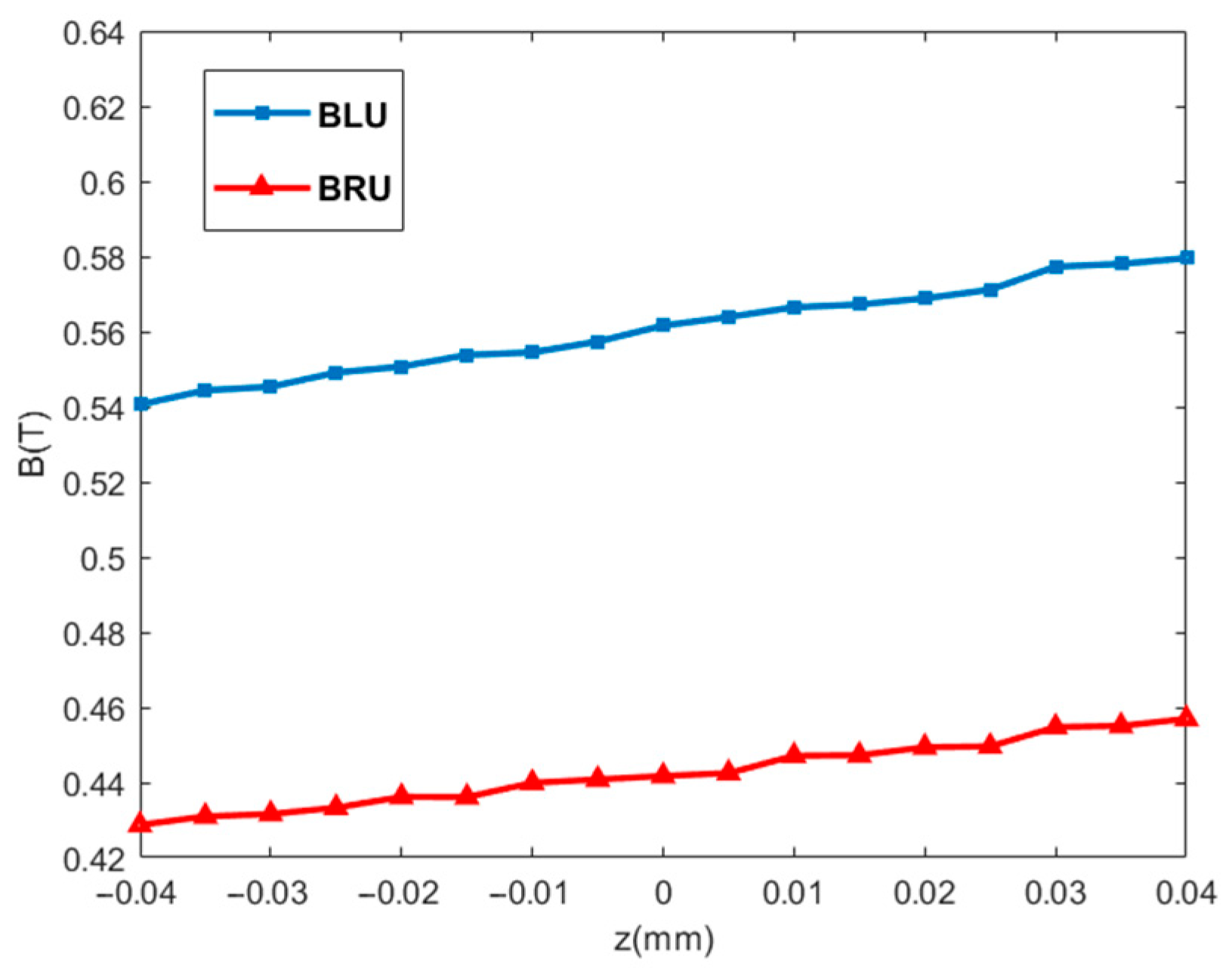
2.4. Verification of the Levitating Force Model and Magnetic Flux Leakage Parameters
2.5. Dynamic Model of Levitating System
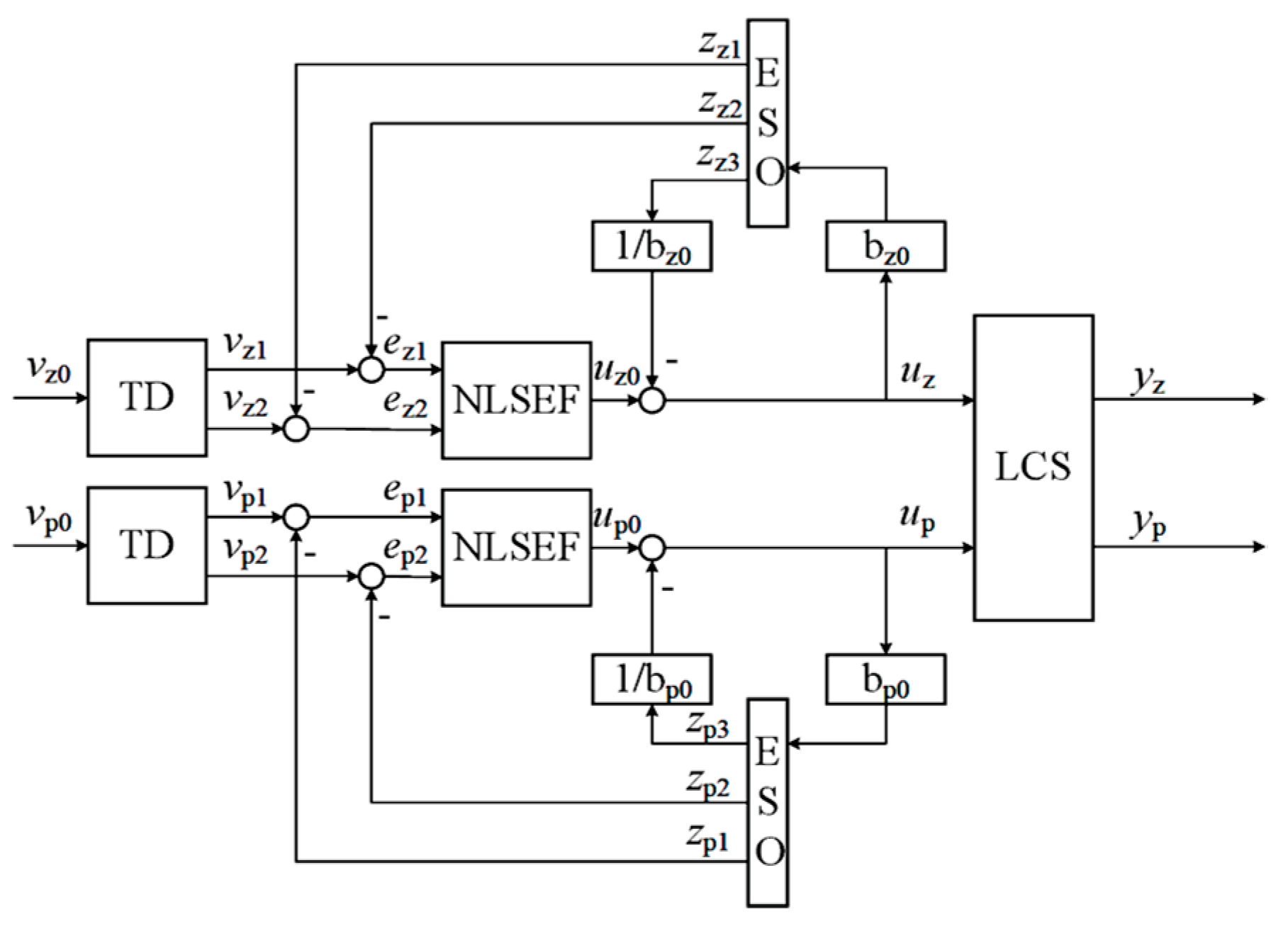
3. A Levitating Control System Based on Active Disturbance Rejection
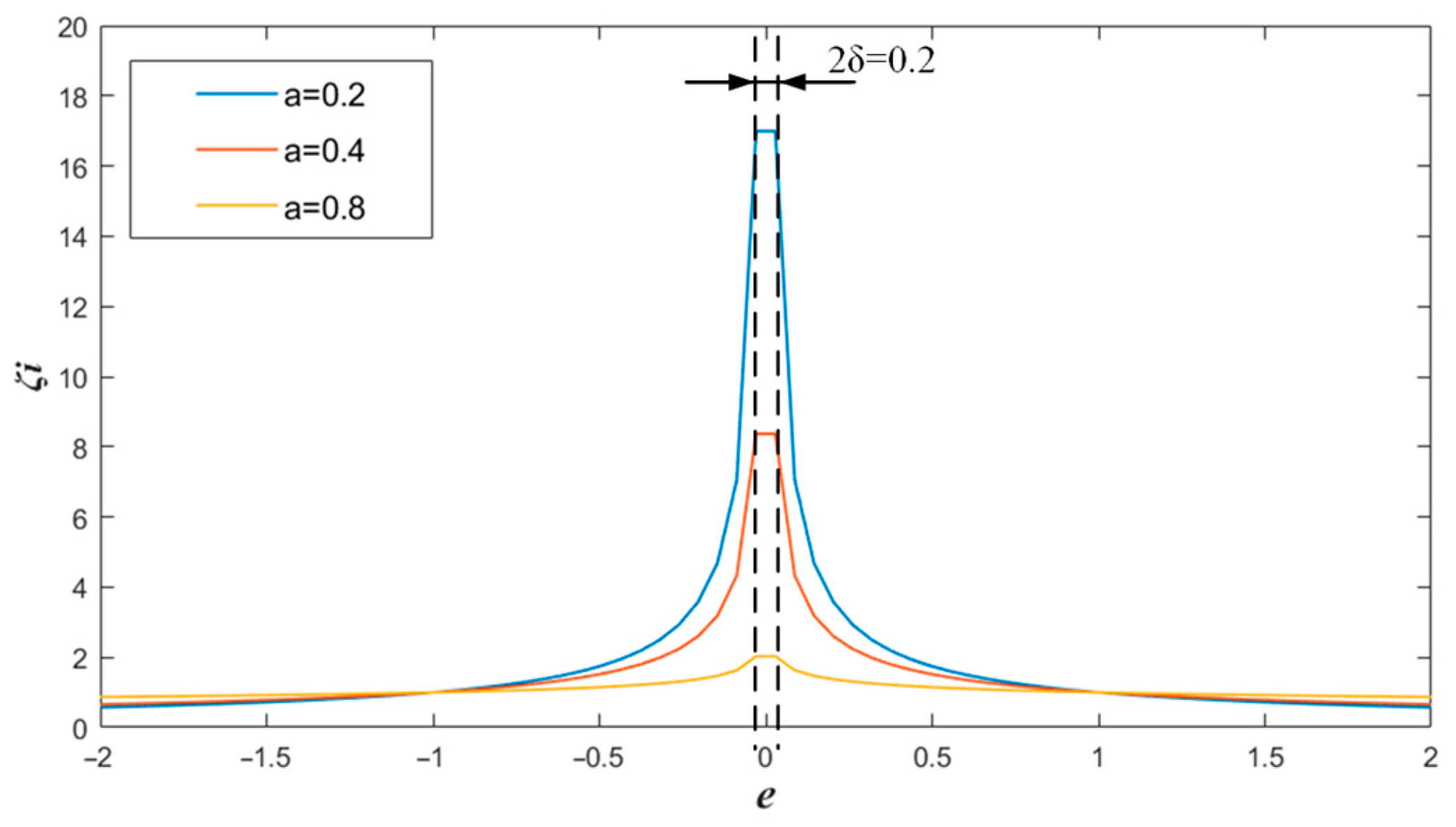
3.1. Design of Active Disturbance Rejection Controller for Levitating Control System
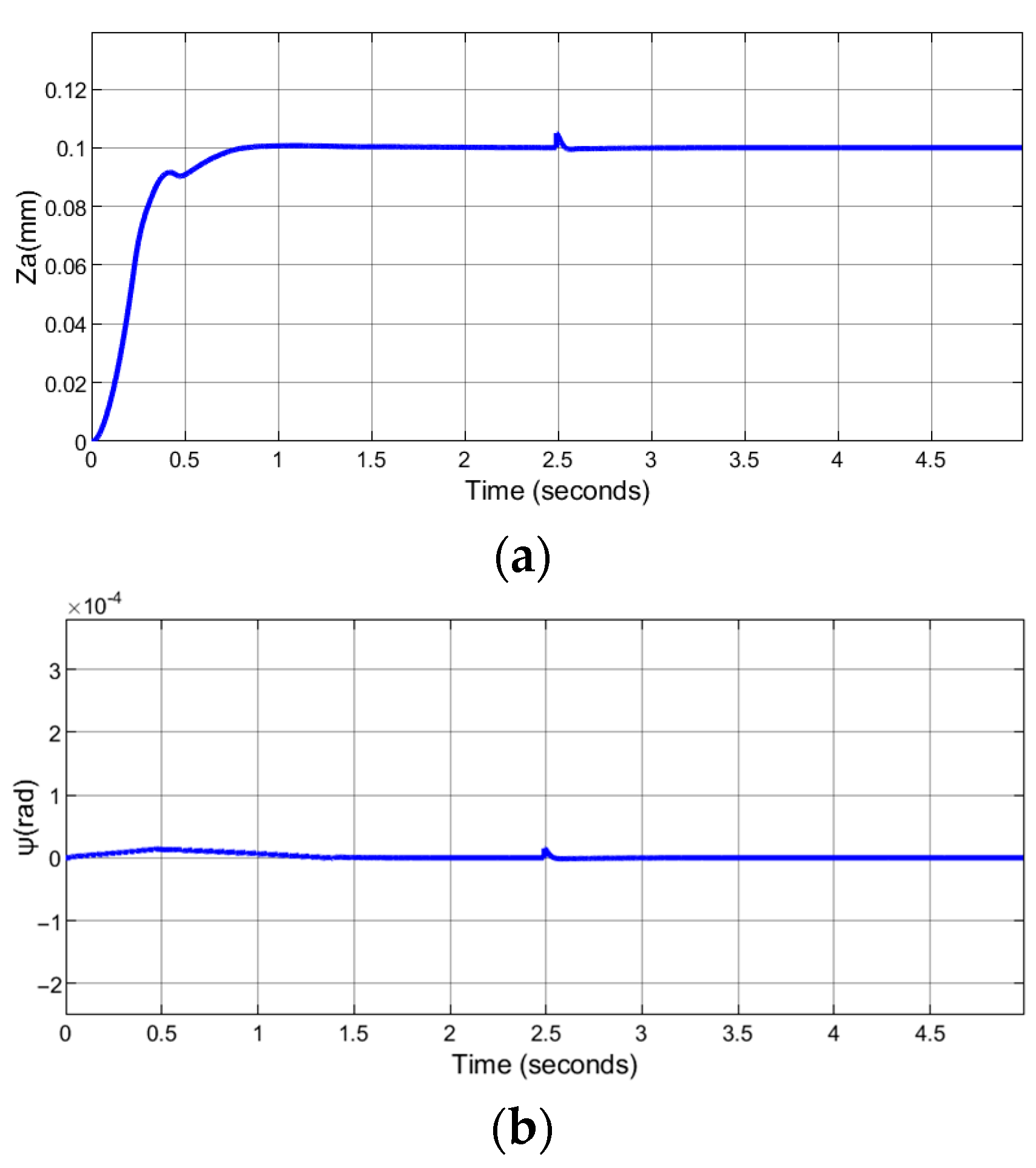
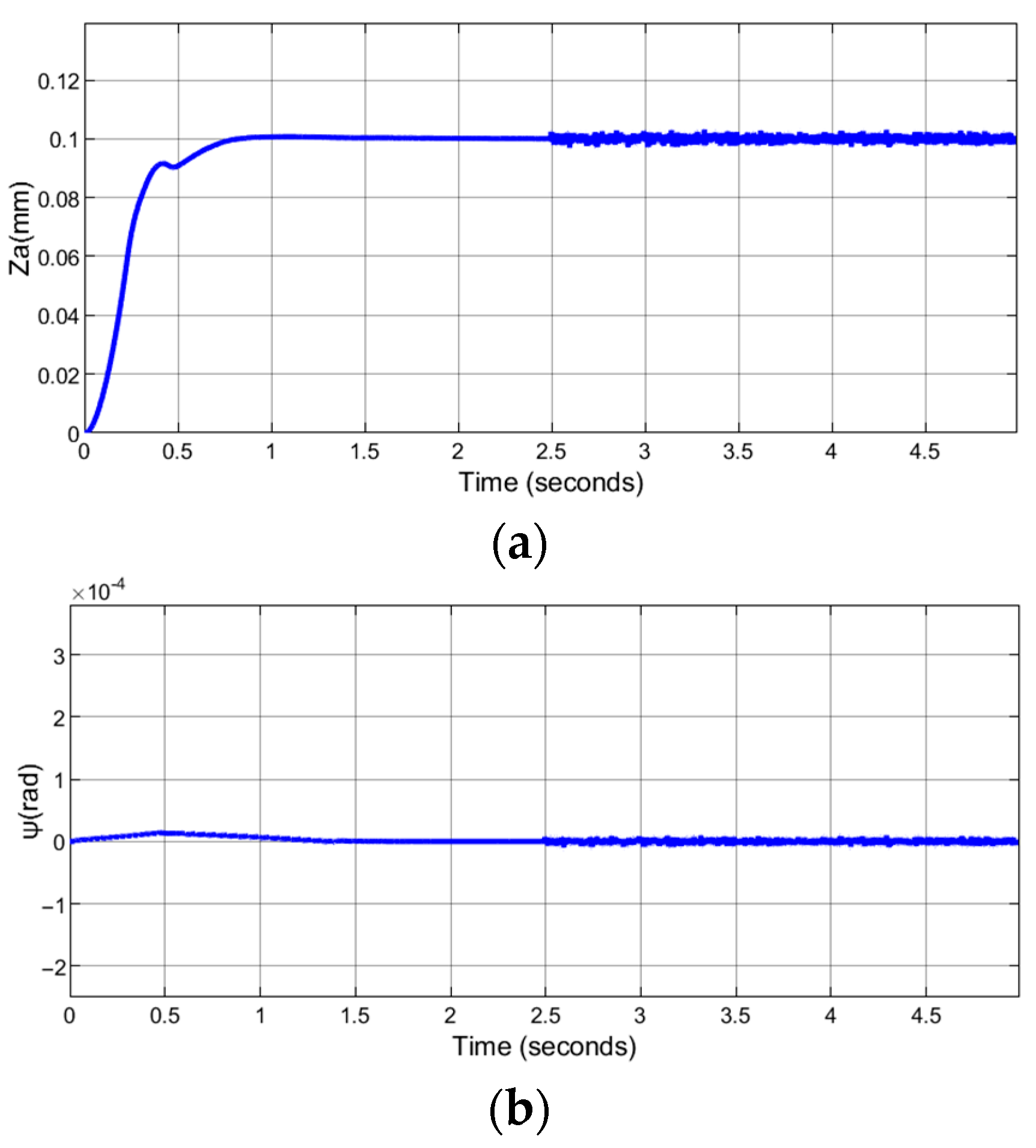
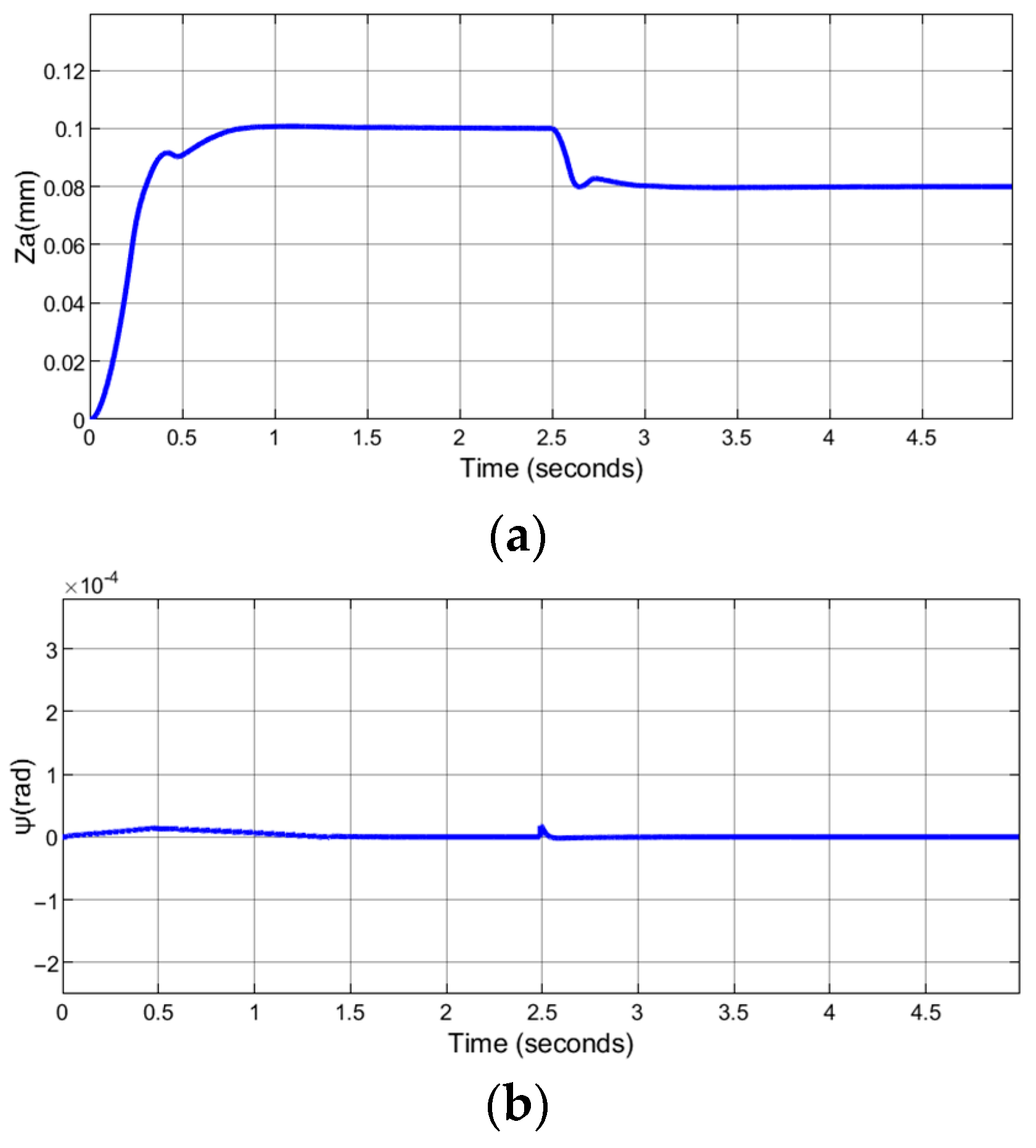
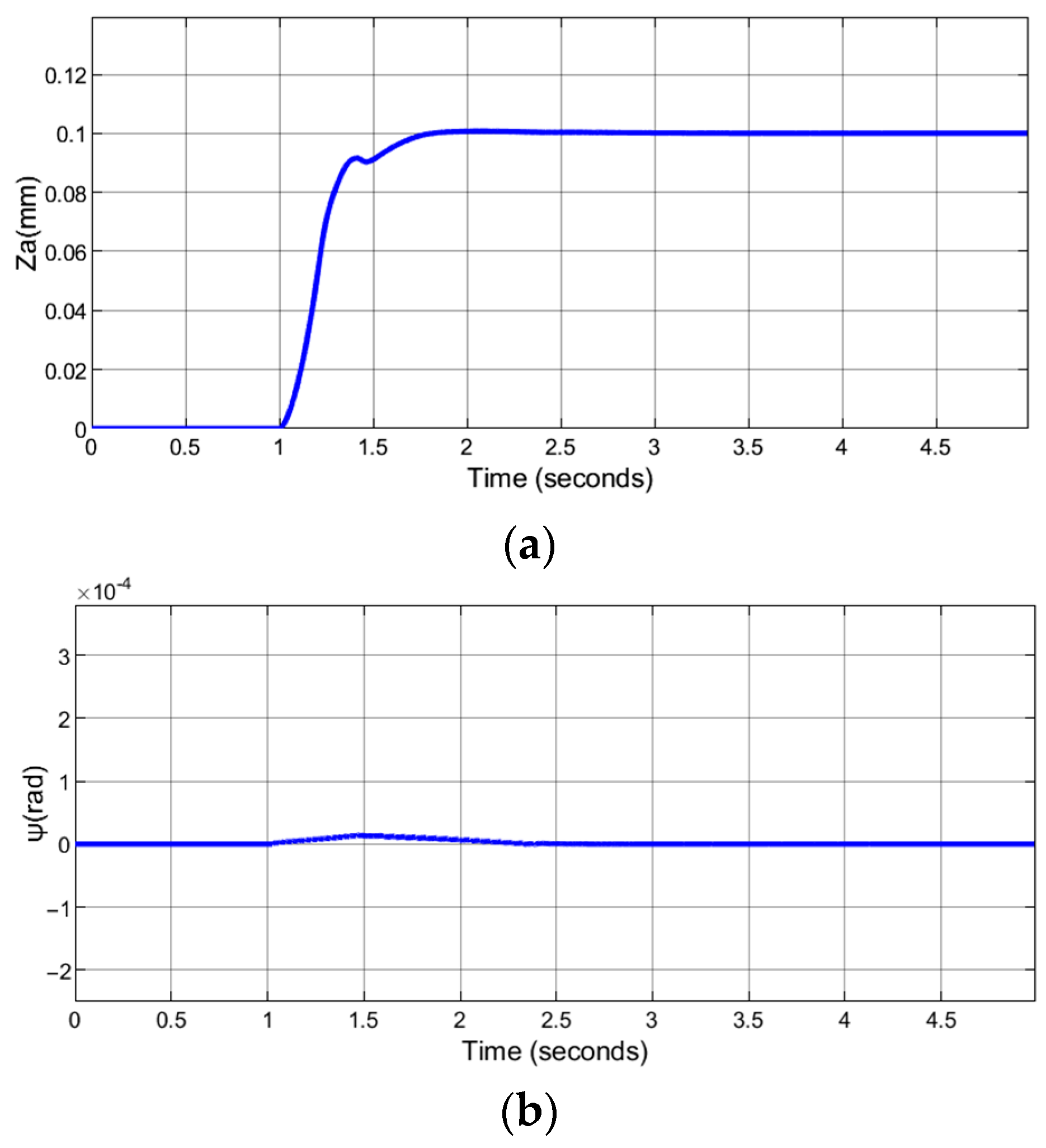
3.2. Simulation Analysis of the Levitating Control System
4. Experimental Testing of the Levitating Control System
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, J.-Y.; Li, P.; Zheng, Y.; Tian, C.-L.; Zhou, Z.-Z. A novel magnetic circuit and structure for magnetic levitation ruler. Meas. Control 2023, 56, 1545–1561. [Google Scholar] [CrossRef]
- Zhou, Z.-Z.; Wang, H.-X.; Liu, B.-S. Levitation position control of a precise 6-DOF Planar magnetic Levitation stage. Mach. Tool Hydraul. 2018, 46, 125–131. [Google Scholar] [CrossRef]
- Liu, L.-L.; Zhou, J.-H. Parameter Self-adjusting Control Method of Fuzzy PID for Magnetic Levitation Ball System. Control Eng. China 2021, 28, 354–359. [Google Scholar] [CrossRef]
- Hernández-Guzmán, V.M.; Silva-Ortigoza, R.; Marciano-Melchor, M. Position Control of a Maglev System Fed by a DC/DC Buck Power Electronic Converter. Complexity 2020, 2020, 8236060. [Google Scholar] [CrossRef]
- Debdoot, S. Real-Time implementation and performance analysis of robust 2-DOF PID controller for Maglev system using pole search technique. J. Ind. Inf. Integr. 2019, 15, 183–190. [Google Scholar] [CrossRef]
- Aysen, D.; Serdar, E.; Baran, H.; Davut, I. Opposition-based artificial electric field algorithm and its application to FOPID controller design for unstable magnetic ball levitating system. Eng. Sci. Technol. Int. J. 2021, 24, 469–479. [Google Scholar] [CrossRef]
- Chauhan, D.; Yadav, A. Stability and agent dynamics of artificial electric field algorithm. J. Supercomput. 2024, 80, 835–864. [Google Scholar] [CrossRef]
- Deepa, T.; Subbulekshmi, D.; Lakshmi, P.; Maheedhar, M.; Kishore, E.; Vinodharanai, M.; Chockalingam, T. Comparative Study of Different Controllers for Levitating Ferromagnetic Material. Adv. Mater. Sci. Eng. 2022, 2022, 4344083. [Google Scholar] [CrossRef]
- Pandey, S.; Dourla, V.; Dwivedi, P.; Junghare, A. Introduction and realization of four fractional-order sliding mode controllers for nonlinear open-loop unstable system: A magnetic levitation study case. Nonlinear Dyn. 2019, 98, 601–621. [Google Scholar] [CrossRef]
- Yaseen, H.M.S.; Siffat, S.A.; Ahmad, I.; Malik, A.S. Nonlinear adaptive control of magnetic levitation system using terminal sliding mode and integral backstepping sliding mode controllers. ISA Trans. 2022, 126, 121–133. [Google Scholar] [CrossRef]
- Acharya, D.S.; Swain, S.K.; Mishra, S.K. Real-Time Implementation of a Stable 2 DOF PID Controller for Unstable Second-Order Magnetic Levitation System with Time Delay. Arab. J. Sci. Eng. 2020, 45, 6311–6329. [Google Scholar] [CrossRef]
- Gopi, R.S.; Srinivasan, S.; Panneerselvam, K.; Teekaraman, Y.; Kuppusamy, R.; Urooj, S. Enhanced Model Reference Adaptive Control Scheme for Tracking Control of Magnetic Levitation System. Energies 2021, 14, 1455. [Google Scholar] [CrossRef]
- Kim, S.K.; Ahn, C.K. Sensorless non-linear position-stabilising control for magnetic levitation systems. IET Control. Theory Appl. 2020, 14, 2682–2687. [Google Scholar] [CrossRef]
- Zhu, H.; Teo, T.J.; Pang, C.K. Magnetically Levitated Parallel Actuated Dual-Stage (Maglev-PAD) System for Six-Axis Precision Positioning. IEEE/ASME Trans. Mechatron. 2019, 24, 1829–1838. [Google Scholar] [CrossRef]
- Trbusic, M.; Jesenik, M.; Trlep, M.; Hamler, A. Energy Based Calculation of the Second-Order Levitation in Magnetic Fluid. Mathematics 2021, 9, 2507. [Google Scholar] [CrossRef]
- Li, Y.-Q.; Feng, G.-S.; Wang, X.-F.; Wu, J.-Z.; Ma, J.; Xiao, L.-T.; Jia, S.-T. Reduction of characteristic RL time for fast, efficient magnetic levitation. AIP Adv. 2017, 7, 095016. [Google Scholar] [CrossRef]
- Wu, C.; Li, S.-S. Modeling, Design and Suspension Force Analysis of a Novel AC Six-Pole Heteropolar Hybrid Magnetic Bearing. Appl. Sci. 2023, 13, 1643. [Google Scholar] [CrossRef]
- Chen, W.; Tong, J.-Q.; Yang, H.-H.; Liu, F.-L.; Qin, Z.; Ren, Z.-Y. Modeling and Vibration Analysis of a 3-UPU Parallel Vibration Isolation Platform with Linear Motors Based on MS-DT-TMM. Shock. Vibation 2021, 2021, 9918097. [Google Scholar] [CrossRef]
- Yu, T.-T.; Zhang, Z.-Z.; Li, Y.; Zhao, W.-L.; Zhang, J.-C. Improved active disturbance rejection controller for rotor system of magnetic levitation turbomachinery. Electron. Res. Arch. 2023, 31, 1570–1586. [Google Scholar] [CrossRef]
- Tan, L.-L.; Chen, Z.-X.; Gao, Q.-H.; Liu, J.-F. Performance recovery of uncertain nonaffine systems by active disturbance rejection control. Meas. Control 2024, 57, 3–15. [Google Scholar] [CrossRef]
- Sun, X.-D.; Jin, Z.-J.; Chen, L.; Yang, Z.-B. Disturbance rejection based on iterative learning control with extended state observer for a four-degree-of-freedom hybrid magnetic bearing system. Mech. Syst. Signal Process. 2021, 153, 107465. [Google Scholar] [CrossRef]
- Wei, Z.-X.; Huang, Z.-W.; Zhu, J.-M. Position Control of Magnetic Levitation Ball Based on an Improved Adagrad Algorithm and Deep Neural Network Feedforward Compensation Control. Math. Probl. Eng. 2020, 2020, 8935423. [Google Scholar] [CrossRef]
- He, H.-C.; Si, T.-T.; Sun, L.; Liu, B.-T.; Li, Z.-B. Linear Active Disturbance Rejection Control for Three-Phase Voltage-Source PWM Rectifier. IEEE Access 2020, 8, 45050–45060. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Result (H−1) | Result (H−1) | ||
|---|---|---|---|
| R11 | R12 | ||
| R21 | R22 | ||
| R31 | R32 | ||
| R41 | R42 | ||
| R51 | R52 | ||
| R61 | R62 | ||
| R71 | R72 | ||
| R81 | R82 | ||
| RL_M | RF_U | ||
| RR_M | RF_D | ||
| RB_U | RL_U_A_B | ||
| RB_D | RL_U_A_C | ||
| RL_D_A_B | RL_D_A_C | ||
| RR_U_A_B | RR_U_A_C | ||
| RR_D_A_B | RR_D_A_C | ||
| RM_U_B | RM_U_C | ||
| RM_D_B | RM_D_C | ||
| RLCU_U_B | RLCU_U_C | ||
| RLCU_D_B | RLCU_D_C | ||
| RRCU_U_B | RRCU_U_C | ||
| RRCU_D_B | RRCU_D_C |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| r | 900 | βe2 | 1398 | βf2 | 0.01 |
| h | 0.001 | βe3 | 1015 | a2 | 0.25 |
| βe1 | 200 | βf1 | 30 | a3 | 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Tian, G.; Li, P.; Tian, C.; Zhou, Z. Levitating Control System of Maglev Ruler Based on Active Disturbance Rejection Controller. Appl. Sci. 2024, 14, 8069. https://doi.org/10.3390/app14178069
Sun J, Tian G, Li P, Tian C, Zhou Z. Levitating Control System of Maglev Ruler Based on Active Disturbance Rejection Controller. Applied Sciences. 2024; 14(17):8069. https://doi.org/10.3390/app14178069
Chicago/Turabian StyleSun, Jiyuan, Gengyun Tian, Pin Li, Chunlin Tian, and Zhenxiong Zhou. 2024. "Levitating Control System of Maglev Ruler Based on Active Disturbance Rejection Controller" Applied Sciences 14, no. 17: 8069. https://doi.org/10.3390/app14178069