
Evaluation of Occupational Exoskeletons: A Comprehensive Protocol for Experimental Design and Analysis

 , ,
, ,  , ,
, , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
Featured Application
Abstract
1. Introduction
2. Materials and Methods
2.1. Stage I: Pre-Experimental Planning
2.1.1. Target Definition and List of Variables of Interest
2.1.2. Preliminary Study
2.1.3. Selection of Design Factors
2.2. Stage II: Detailed Experimental Planning
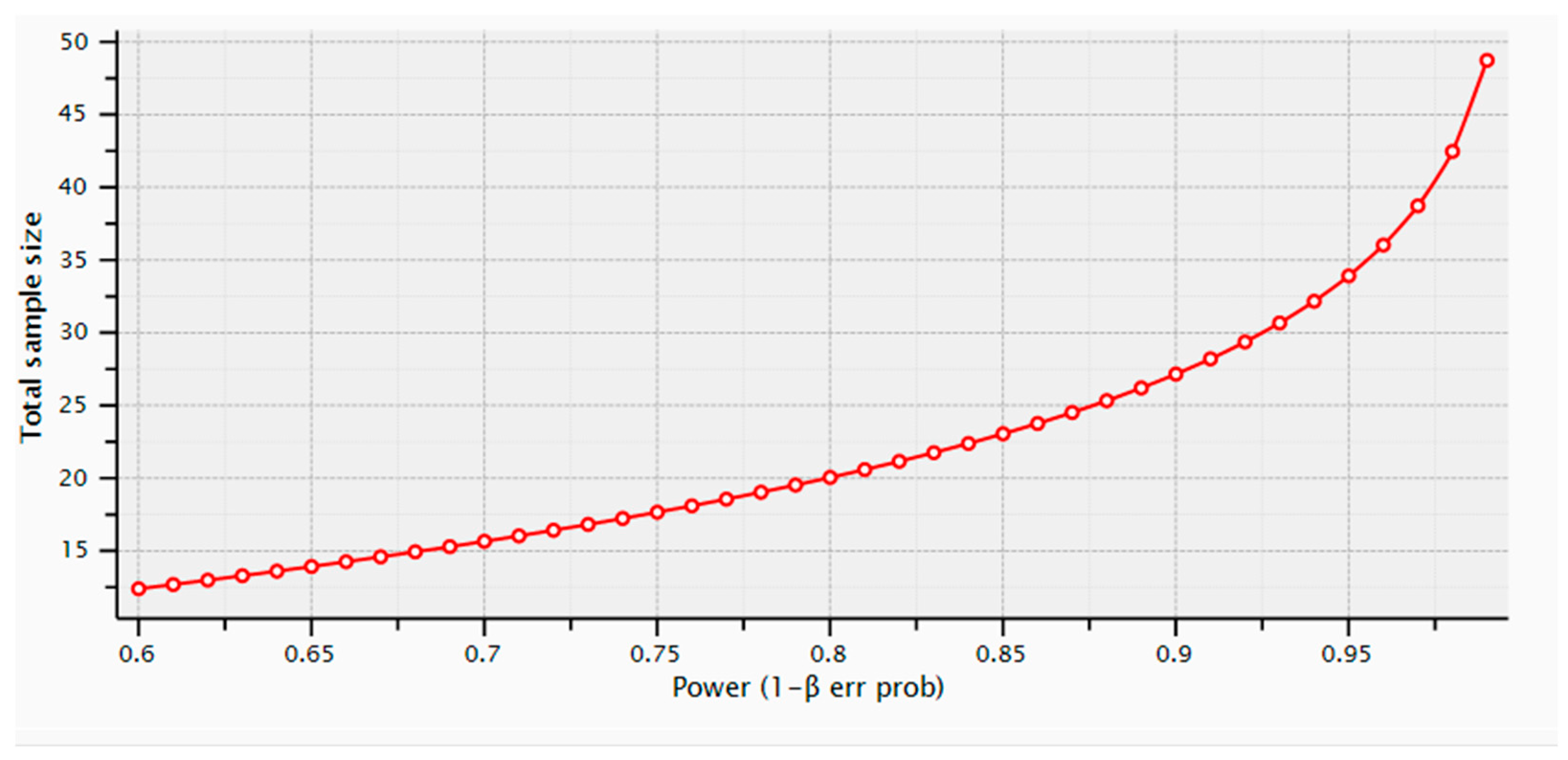
2.2.1. Definition of the Sample (Sample Size and Participants)
2.2.2. Tools and Equipment
2.2.3. Questionnaires
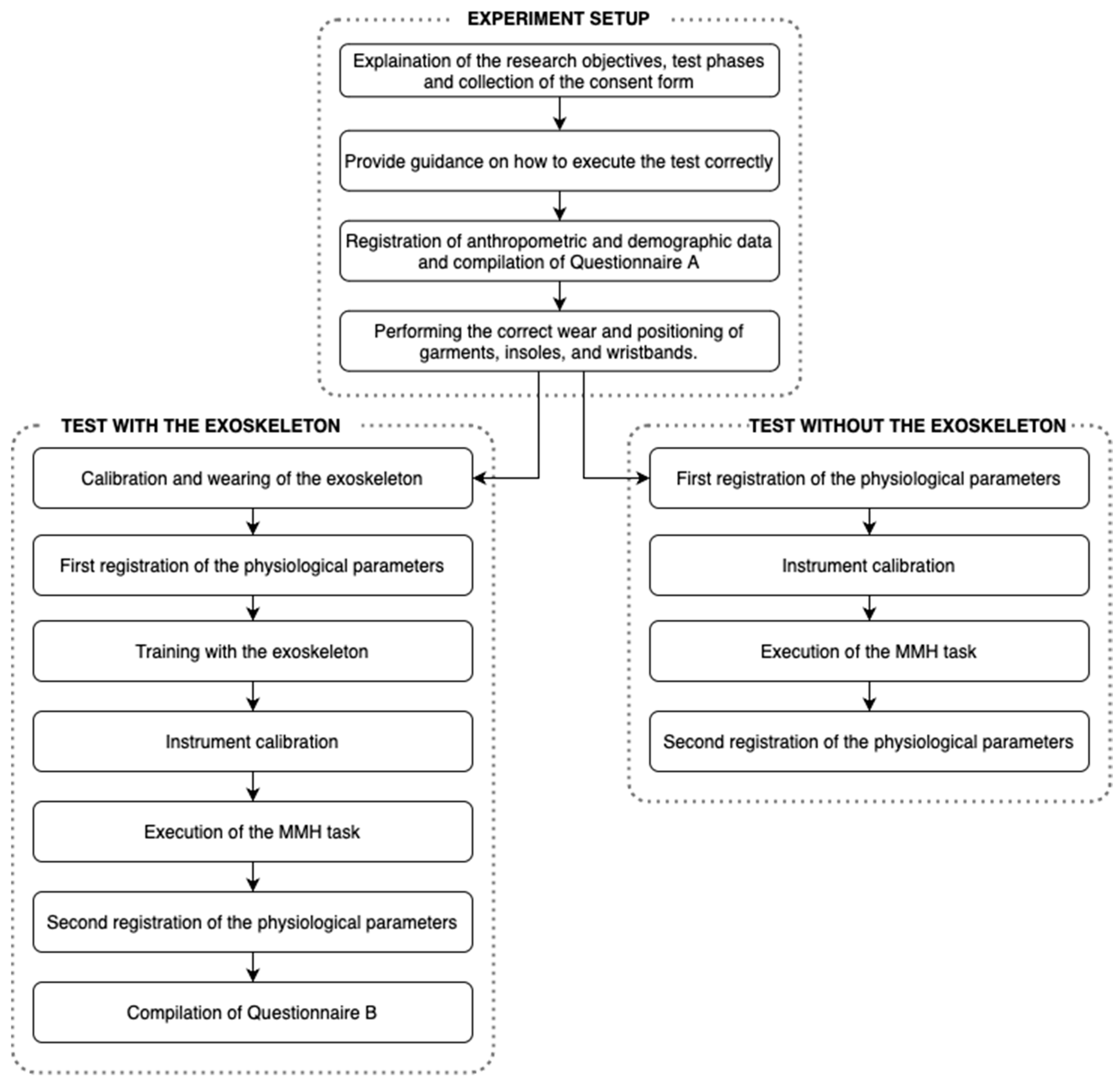
2.3. Stage III: Experiment Execution
2.3.1. Data Collection
2.3.2. Experimental Implementation
2.4. Stage IV: Data Analysis
2.4.1. Results Analysis and Interpretation
2.4.2. Conclusions and Recommendations
3. Case Study: Evaluation of a Passive Back-Support Exoskeleton
3.1. Stage I: Pre-Experimental Planning
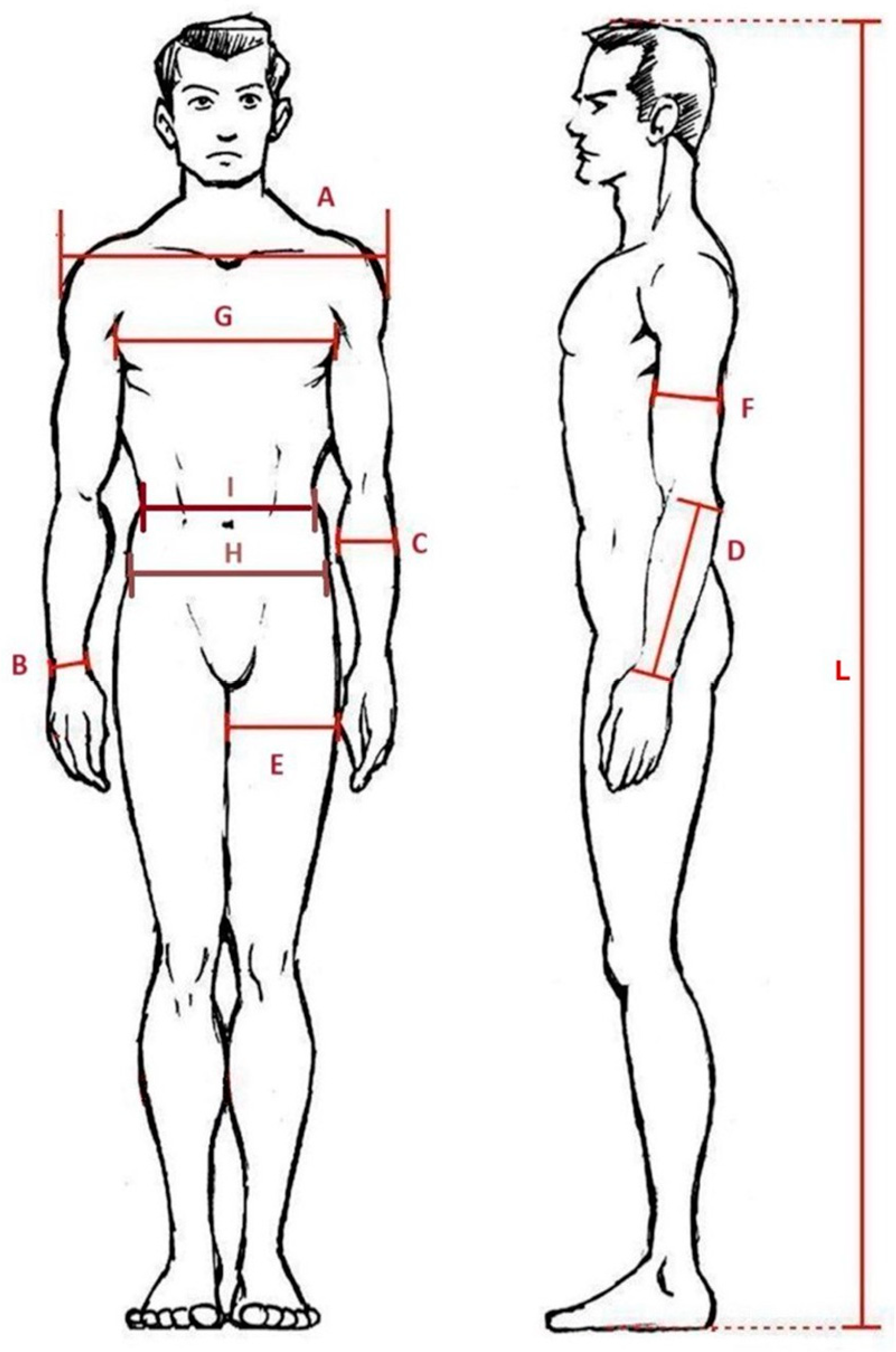
3.1.1. Target Definition and a List of Variables of Interest
3.1.2. Preliminary Study
3.1.3. Selection of Design Factors
3.2. Stage II: Detailed Experimental Planning
3.2.1. Definition of the Sample
3.2.2. Tools and Equipment
3.2.3. Questionnaires
3.3. Stage III: Experimental Execution
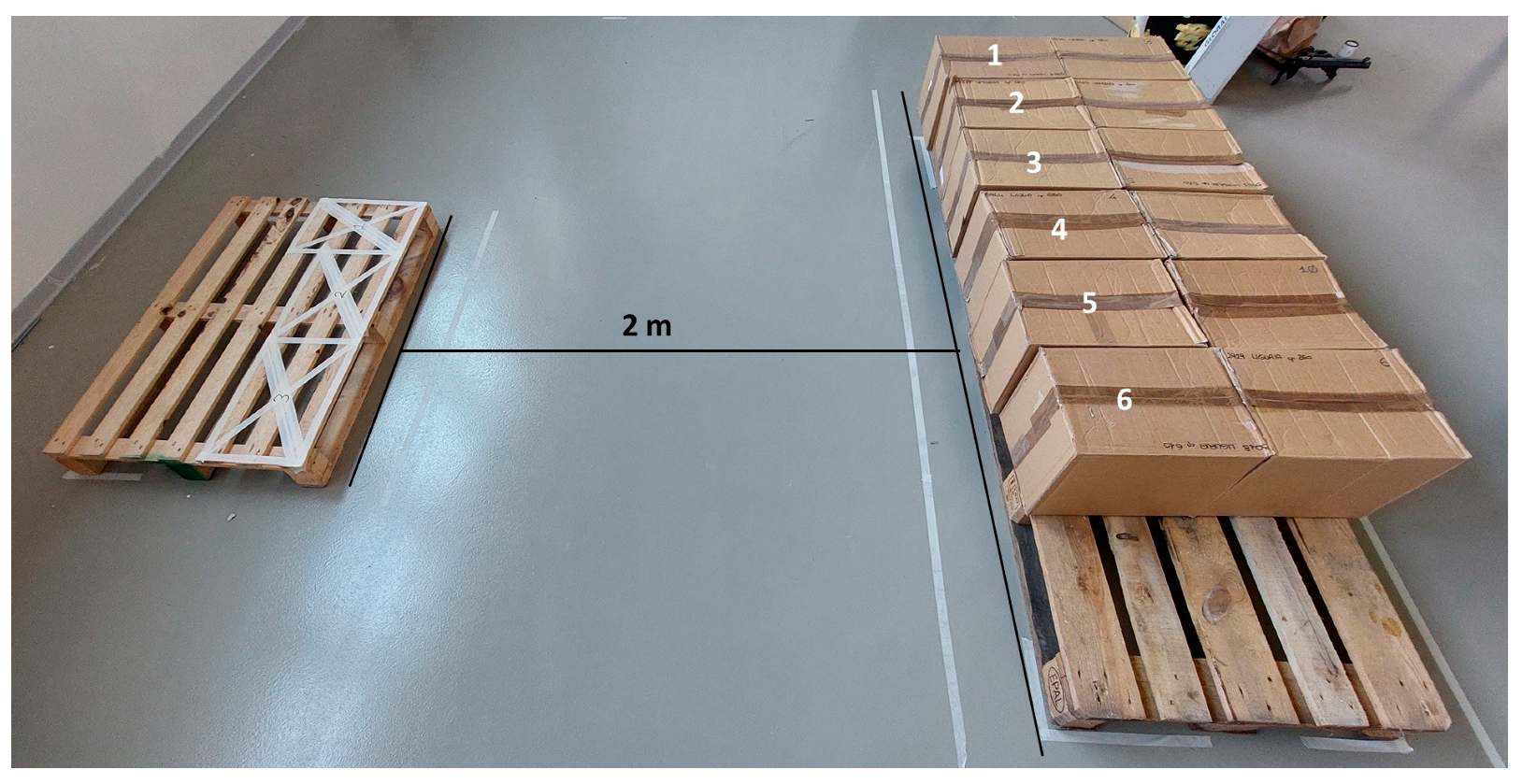
3.3.1. Data Collection
3.3.2. Experimental Implementation
3.4. Stage IV: Experimental Analysis
Results Analysis and Interpretation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
- Questionnaire A
- Instructions: Complete the questionnaire before starting the test.
- User ID: ____________
- Age: ____________
- Gender:
- ○
- Male
- ○
- Female
- ○
- Prefer not to say
- Work position: _______________________
- Educational Qualification:
- ○
- Lower Secondary
- ○
- Upper Secondary
- ○
- Bachelor’s degree
- ○
- Master’s degree
- ○
- PhD
- ○
- Other (please specify): _______________________
- Have you ever heard about exoskeletons?
- ○
- Yes
- ○
- No
- 2.
- If you answered YES to the previous question, have you ever used an exoskeleton?
- ○
- Yes
- ○
- No
- 3.
- If you answered YES to Question 2, what type of exoskeleton?
- ○
- Powered exoskeleton
- ○
- Passive exoskeleton
- ○
- Other (please specify): _______________________
- 4.
- Which area of the body did the exoskeleton that you tried, support?
- ○
- Upper limbs
- ○
- Lower limbs
- ○
- Lower back
- ○
- Other (please specify): _______________________
- 5.
- What is your opinion about exoskeletons?
- ○
- Positive
- ○
- Negative
- ○
- No opinion
- 6.
- Does your daily routine/work activity involve material manual handling (MMH)?
- ○
- Yes
- ○
- No
- 7.
- If you answered YES to Question 6, write the average handled weight, in kilograms.
- ___________________________ kg
- 8.
- If you answered YES to Question 6, does the object have handles or can you grasp the object comfortably?
- ○
- Yes
- ○
- No
- 9.
- If you answered YES to Question 6, how long do you perform MMH operations in your daily routine/work activity?
- ___________________________ min
- 10.
- How many days per week do you practice moderate or intense physical activities such as weight carrying, gym activities, aerobic activities, running, biking, etc.?
- ○
- I do not perform any physical activity
- ○
- 1–2 days/week
- ○
- 3–5 days/week
- ○
- 6–7 days/week
- 11.
- Have you ever been diagnosed with musculoskeletal disorders?
- ○
- Yes
- ○
- No
Appendix B
- Questionnaire B
- Section 1
- Please complete this section after performing the MMH task without the exoskeleton.
- The following table shows the body parts involved during the task.
- * “discomfort” refers to the set of non-painful sensations perceived during the activity, such as difficulties encountered in grasping the object, problems caused by clothing during lifting or depositing the object, and obstacles to movement while holding the object.
| Neck | 1 | 2 | 3 | 4 | 5 |
| Shoulders | 1 | 2 | 3 | 4 | 5 |
| Upper limbs | 1 | 2 | 3 | 4 | 5 |
| Back | 1 | 2 | 3 | 4 | 5 |
| Legs | 1 | 2 | 3 | 4 | 5 |
| Feet and ankles | 1 | 2 | 3 | 4 | 5 |
- 2.
- The following table shows the actions performed during the task.
- ** “physical effort” refers to a state characterized by a feeling of fatigue combined with an undesired reduction or variation in the performance of the activity (Rohmert 1973).
| Erected | 1 | 2 | 3 | 4 | 5 |
| Walking | 1 | 2 | 3 | 4 | 5 |
| Load lifting with knee bending | 1 | 2 | 3 | 4 | 5 |
| Load lifting without knee bending | 1 | 2 | 3 | 4 | 5 |
- Section 2
- The following table shows the body parts involved during the task.
- Please, mark with an “X” the level of discomfort* that you perceived during the task, considering that 1 refers to “no discomfort” and 5 refers to “too much discomfort”.
- * “discomfort” refers to the set of non-painful sensations perceived during the activity, such as difficulties encountered in grasping the object, problems caused by clothing during lifting or depositing the object, and obstacles to movement while holding the object.
| Neck | 1 | 2 | 3 | 4 | 5 |
| Shoulders | 1 | 2 | 3 | 4 | 5 |
| Upper limbs | 1 | 2 | 3 | 4 | 5 |
| Back | 1 | 2 | 3 | 4 | 5 |
| Legs | 1 | 2 | 3 | 4 | 5 |
| Feet and ankles | 1 | 2 | 3 | 4 | 5 |
- 2.
- The following table shows the actions performed during the task.
- Please, mark with an “X” the level of physical effort** that you perceived during the task, considering that 1 refers to “no effort” and 5 refers to “too much effort”.
- ** “physical effort” refers to a state characterized by a feeling of fatigue combined with an undesired reduction or variation in the performance of the activity (Rohmert 1973).
| Erected | 1 | 2 | 3 | 4 | 5 |
| Walking | 1 | 2 | 3 | 4 | 5 |
| Load lifting with knee bending | 1 | 2 | 3 | 4 | 5 |
| Load lifting without knee bending | 1 | 2 | 3 | 4 | 5 |
- 3.
- The following table shows the body parts that interact with the exoskeleton.
| Shoulders | 1 | 2 | 3 | 4 | 5 |
| Chest | 1 | 2 | 3 | 4 | 5 |
| Pelvis | 1 | 2 | 3 | 4 | 5 |
| Thighs | 1 | 2 | 3 | 4 | 5 |
| Back | 1 | 2 | 3 | 4 | 5 |
- 4.
- For each of the following statements, please mark with an “X” the score from 1 to 5 that reflects your level of agreement, where 1 means “strongly disagree” and 5 means “strongly agree.”
- I found the exoskeleton easy to wear
1 2 3 4 5 - b.
- I found the exoskeleton easy to use
1 2 3 4 5 - c.
- I found the exoskeleton comfortable
1 2 3 4 5 - d.
- I think that movements are limited using the exoskeleton
1 2 3 4 5
- 5.
- For each of the following statements, please mark with an “X” the score from 1 to 5 that reflects your level of agreement, where 1 means “Not at all” and 5 means “A lot”.
- How frequently would you use the exoskeleton?
1 2 3 4 5 - b.
- Would you propose the exoskeleton to improve the workstation?
1 2 3 4 5
- 6.
- At the end of this experience, has your opinion of exoskeletons changed?
- ○
- Yes
- ○
- No
- 7.
- If you answered YES to Question 6, specify how your opinion has changed.
- ○
- Positively
- ○
- Negatively
- 8.
- Do you think the use of the exoskeleton would be useful in your work activity?
- ○
- Yes
- ○
- No
References
- Kazerooni, H.; Tung, W.; Pillai, M. Evaluation of Trunk-Supporting Exoskeleton. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2019, 63, 1080–1083. [Google Scholar] [CrossRef]
- Hoffmann, N.; Prokop, G.; Weidner, R. Methodologies for evaluating exoskeletons with industrial applications. Ergonomics 2022, 65, 276–295. [Google Scholar] [CrossRef] [PubMed]
- Qu, X.; Qu, C.; Ma, T.; Yin, P.; Zhao, N.; Xia, Y.; Qu, S. Effects of an industrial passive assistive exoskeleton on muscle activity, oxygen consumption and subjective responses during lifting tasks. PLoS ONE 2021, 16, e0245629. [Google Scholar] [CrossRef] [PubMed]
- Elprama, S.A.; Vanderborght, B.; Jacobs, A. An industrial exoskeleton user acceptance framework based on a literature review of empirical studies. Appl. Ergon. 2022, 100, 103615. [Google Scholar] [CrossRef]
- Botti, L.; Melloni, R. Occupational Exoskeletons: Understanding the Impact on Workers and Suggesting Guidelines for Practitioners and Future Research Needs. Appl. Sci. 2023, 14, 84. [Google Scholar] [CrossRef]
- Huysamen, K.; de Looze, M.; Bosch, T.; Ortiz, J.; Toxiri, S.; O’Sullivan, L.W. Assessment of an active industrial exoskeleton to aid dynamic lifting and lowering manual handling tasks. Appl. Ergon. 2018, 68, 125–131. [Google Scholar] [CrossRef]
- Lazzaroni, M.; Fanti, V.; Sposito, M.; Chini, G.; Draicchio, F.; Di Natali, C.; Caldwell, D.G.; Ortiz, J. Improving the Efficacy of an Active Back-Support Exoskeleton for Manual Material Handling Using the Accelerometer Signal. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Seoul, Republic of Korea, 21–24 August 2022. [Google Scholar] [CrossRef]
- Pesenti, M.; Invernizzi, G.; Mazzella, J.; Bocciolone, M.; Pedrocchi, A.; Gandolla, M. IMU-based human activity recognition and payload classification for low-back exoskeletons. Sci. Rep. 2023, 13, 1–10. [Google Scholar] [CrossRef]
- Schwartz, M.; Desbrosses, K.; Theurel, J.; Mornieux, G. Biomechanical Consequences of Using Passive and Active Back-Support Exoskeletons during Different Manual Handling Tasks. Int. J. Environ. Res. Public Health 2023, 20, 6468. [Google Scholar] [CrossRef]
- Di Natali, C.; Chini, G.; Toxiri, S.; Monica, L.; Anastasi, S.; Draicchio, F.; Caldwell, D.G.; Ortiz, J. Equivalent Weight: Connecting Exoskeleton Effectiveness with Ergonomic Risk during Manual Material Handling. Int. J. Environ. Res. Public Health 2021, 18, 2677. [Google Scholar] [CrossRef]
- Exploring Neuroergonomic Fit of Passive Exoskeletons during Manual Handling Tasks. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2019, 63, 1112. [CrossRef]
- De Bock, S.; Ghillebert, J.; Govaerts, R.; Tassignon, B.; Rodriguez-Guerrero, C.; Crea, S.; Veneman, J.; Geeroms, J.; Meeusen, R.; De Pauw, K. Benchmarking occupational exoskeletons: An evidence mapping systematic review. Appl. Ergon. 2022, 98, 103582. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.-M.; Le, D.K.L.; Lin, W.-C. Evaluation of a Passive Upper-Limb Exoskeleton Applied to Assist Farming Activities in Fruit Orchards. Appl. Sci. 2021, 11, 757. [Google Scholar] [CrossRef]
- von Glinski, A.; Yilmaz, E.; Mrotzek, S.; Marek, E.; Jettkant, B.; Brinkemper, A.; Fisahn, C.; Schildhauer, T.A.; Geßmann, J. Effectiveness of an on-body lifting aid (HAL® for care support) to reduce lower back muscle activity during repetitive lifting tasks. J. Clin. Neurosci. 2019, 63, 249–255. [Google Scholar] [CrossRef] [PubMed]
- Pinho, J.P.; Forner-Cordero, A. Shoulder muscle activity and perceived comfort of industry workers using a commercial upper limb exoskeleton for simulated tasks. Appl. Ergon. 2022, 101, 103718. [Google Scholar] [CrossRef] [PubMed]
- de Looze, M.P.; Bosch, T.; Krause, F.; Stadler, K.S.; O’sullivan, L.W. Exoskeletons for industrial application and their potential effects on physical work load. Ergonomics 2016, 59, 671–681. [Google Scholar] [CrossRef]
- UNI/TR 11950:2024; Sicurezza e Salute Nell’uso Degli Esoscheletri Occupazionali Orientati ad Agevolare le Attività Lavorative. UNI: Milano, Italy, 2024.
- Pinto-Fernandez, D.; Torricelli, D.; Sanchez-Villamanan, M.d.C.; Aller, F.; Mombaur, K.; Conti, R.; Vitiello, N.; Moreno, J.C.; Pons, J.L. Performance Evaluation of Lower Limb Exoskeletons: A Systematic Review. IEEE Trans. Neural Syst. Rehabilitation Eng. 2020, 28, 1573–1583. [Google Scholar] [CrossRef]
- Massardi, S.; Rodriguez-Cianca, D.; Pinto-Fernandez, D.; Moreno, J.C.; Lancini, M.; Torricelli, D. Characterization and Evaluation of Human–Exoskeleton Interaction Dynamics: A Review. Sensors 2022, 22, 3993. [Google Scholar] [CrossRef]
- Madinei, S.; Alemi, M.M.; Kim, S.; Srinivasan, D.; Nussbaum, M.A. Biomechanical Evaluation of Passive Back-Support Exoskeletons in a Precision Manual Assembly Task: “Expected” Effects on Trunk Muscle Activity, Perceived Exertion, and Task Performance. Hum. Factors J. Hum. Factors Ergon. Soc. 2020, 62, 441–457. [Google Scholar] [CrossRef]
- Kozinc, Ž.; Baltrusch, S.; Houdijk, H.; Šarabon, N. Short-Term Effects of a Passive Spinal Exoskeleton on Functional Performance, Discomfort and User Satisfaction in Patients with Low Back Pain. J. Occup. Rehabil. 2021, 31, 142–152. [Google Scholar] [CrossRef]
- Baldassarre, A.; Lulli, L.G.; Cavallo, F.; Fiorini, L.; Mariniello, A.; Mucci, N.; Arcangeli, G. Industrial exoskeletons from bench to field: Human-machine interface and user experience in occupational settings and tasks. Front. Public Health 2022, 10, 1039680. [Google Scholar] [CrossRef]
- Botti, L.; Bacchetta, A.P.; Oliva, M.; Melloni, R. Exoskeletons at work: Opportunities, suggestions for implementation and future research needs. In Proceedings of the AHFE 2023 International Conference, San Francisco, CA, USA, 20–24 July 2023; Human Aspects of Advanced Manufacturing. AHFE International: Orlando, FL, USA, 2023. [Google Scholar] [CrossRef]
- Hartmann, V.N.; Rinaldi, D.d.M.; Taira, C.; Forner-Cordero, A. Industrial Upper-Limb Exoskeleton Characterization: Paving the Way to New Standards for Benchmarking. Machines 2021, 9, 362. [Google Scholar] [CrossRef]
- Schmalz, T.; Schändlinger, J.; Schuler, M.; Bornmann, J.; Schirrmeister, B.; Kannenberg, A.; Ernst, M. Biomechanical and Metabolic Effectiveness of an Industrial Exoskeleton for Overhead Work. Int. J. Environ. Res. Public Health 2019, 16, 4792. [Google Scholar] [CrossRef] [PubMed]
- De Bock, S.; Ghillebert, J.; Govaerts, R.; Elprama, S.A.; Marusic, U.; Serrien, B.; Jacobs, A.; Geeroms, J.; Meeusen, R.; De Pauw, K. Passive Shoulder Exoskeletons: More Effective in the Lab Than in the Field? IEEE Trans. Neural Syst. Rehabilitation Eng. 2021, 29, 173–183. [Google Scholar] [CrossRef] [PubMed]
- Botti, L.; Melloni, R.; Oliva, M.; Perini, M.; Bacchetta, A.P. Exoskeletons to Support Manual Material Handling at Work: A Preliminary Study. In Production Processes and Product Evolution in the Age of Disruption; Lecture Notes in Mechanical Engineering; Springer: Cham, Switzerland, 2023. [Google Scholar] [CrossRef]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences, 2nd ed.; Routledge: New York, NY, USA, 1998. [Google Scholar]
- Baguley, T. Understanding statistical power in the context of applied research. Appl. Ergon. 2004, 35, 73–80. [Google Scholar] [CrossRef] [PubMed]
- G*Power. Available online: https://www.psychologie.hhu.de/arbeitsgruppen/allgemeine-psychologie-und-arbeitspsychologie/gpower (accessed on 21 July 2024).
- Lenth, R.V. Some Practical Guidelines for Effective Sample Size Determination. Am. Stat. 2001, 55, 187–193. [Google Scholar] [CrossRef]
- Laugwitz, B.; Held, T.; Schrepp, M. Construction and Evaluation of a User Experience Questionnaire. In HCI and Usability for Education and Work; Holzinger, A., Ed.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 63–76. ISBN 978-3-540-89349-3. [Google Scholar] [CrossRef]
- Mann, H.B.; Whitney, D.R. On a Test of Whether one of Two Random Variables is Stochastically Larger than the Other. Ann. Math. Stat. 1947, 18, 50–60. Available online: http://www.jstor.org/stable/2236101 (accessed on 21 July 2024). [CrossRef]
- Spearman, C. The Proof and Measurement of Association between Two Things. Am. J. Psychol. 1904, 15, 72–101. [Google Scholar] [CrossRef]
- Laevo, B.V. LAEVO V2. Available online: https://www.laevo-exoskeletons.com/en/laevo-v2 (accessed on 19 June 2024).
- Khamaisi, R.; Bacchetta, A.P.; Melloni, R.; Morganti, A.; Peruzzini, M.; Botti, L.; Perini, M. Exoskeletons in action: The impact of exoskeletons on human factors during manual material handling. In Human Aspects of Advanced Manufacturing, Production Management and Process Control; Mrugalska, B., Karwowski, W., Trzcielinski, S., Eds.; AHFE International: Orlando, FL, USA, 2024. [Google Scholar] [CrossRef]
- ISO 7250-1:2017; Basic Human Body Measurements for Technological Design. Part 1: Body Measurement Definitions and Landmarks. International Standard Organization (ISO): Geneva, Switzerland, 2017.
- FlexInFit. Available online: https://www.sensormedica.com/it/flexinfit/ (accessed on 21 July 2024).
- Sensor Medica. freeStep. Available online: https://www.sensormedica.com/it/freestep/ (accessed on 21 July 2024).
- Empatica. Empatica E4. Available online: https://www.empatica.com/en-eu/research/e4/ (accessed on 21 July 2024).
- Turingsense EU Lab. Available online: https://www.turingsense.eu/ (accessed on 21 July 2024).
- SUITX. IX Back Air. Available online: https://www.suitx.com/en/products/ix-back-air-exoskeleton (accessed on 21 July 2024).
- vd Grinten, M.P.; Smitt, P. Development of a practical method for measuring body part discomfort. In Advances in Industrial Egonomics and Safety IV; CRC Press: London, UK, 1992; pp. 318–331. [Google Scholar]
- Albert, W.; Tullis, T.S. Self-Reported Metrics. In Measuring the User Experience; Elsevier: Amsterdam, The Netherlands, 2023; pp. 109–151. [Google Scholar] [CrossRef]
- World Medical Association (WMA). Declaration of Helsinki. Ethical principles for medical research involving human subjects. Jahrb. Für Wiss. Und Ethik 2009, 14, 233–238. [CrossRef]
- Convention for the Protection of Human Rights and Dignity of the Human Being with regard to the Application of Biology and Medicine: Convention on Human Rights and Biomedicine. 1997. Available online: https://pubmed.ncbi.nlm.nih.gov/9363733/ (accessed on 21 July 2024).
- Maurice, P.; Camernik, J.; Gorjan, D.; Schirrmeister, B.; Bornmann, J.; Tagliapietra, L.; Latella, C.; Pucci, D.; Fritzsche, L.; Ivaldi, S.; et al. Objective and Subjective Effects of a Passive Exoskeleton on Overhead Work. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 152–164. [Google Scholar] [CrossRef]
- Beets, M.W.; Pfledderer, C.; von Klinggraeff, L.; Burkart, S.; Armstrong, B. Fund behavioral science like the frameworks we endorse: The case for increased funding of preliminary studies by the National Institutes of Health. Pilot Feasibility Stud. 2022, 8, 1–14. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Perini, M.; Bacchetta, A.P.; Cavazza, N.; Khamaisi, R.K.; Melloni, R.; Morganti, A.; Peruzzini, M.; Botti, L. Evaluation of Occupational Exoskeletons: A Comprehensive Protocol for Experimental Design and Analysis. Appl. Sci. 2024, 14, 8328. https://doi.org/10.3390/app14188328
Perini M, Bacchetta AP, Cavazza N, Khamaisi RK, Melloni R, Morganti A, Peruzzini M, Botti L. Evaluation of Occupational Exoskeletons: A Comprehensive Protocol for Experimental Design and Analysis. Applied Sciences. 2024; 14(18):8328. https://doi.org/10.3390/app14188328
Chicago/Turabian StylePerini, Matteo, Adriano Paolo Bacchetta, Nicoletta Cavazza, Riccardo Karim Khamaisi, Riccardo Melloni, Alessio Morganti, Margherita Peruzzini, and Lucia Botti. 2024. "Evaluation of Occupational Exoskeletons: A Comprehensive Protocol for Experimental Design and Analysis" Applied Sciences 14, no. 18: 8328. https://doi.org/10.3390/app14188328
APA StylePerini, M., Bacchetta, A. P., Cavazza, N., Khamaisi, R. K., Melloni, R., Morganti, A., Peruzzini, M., & Botti, L. (2024). Evaluation of Occupational Exoskeletons: A Comprehensive Protocol for Experimental Design and Analysis. Applied Sciences, 14(18), 8328. https://doi.org/10.3390/app14188328