
Radar-Based Target Tracking Using Deep Learning Approaches with Unscented Kalman Filter

 ,
,  ,
,  and
and 
Abstract
:1. Introduction
1.1. Tracking Target in Aerial Environment
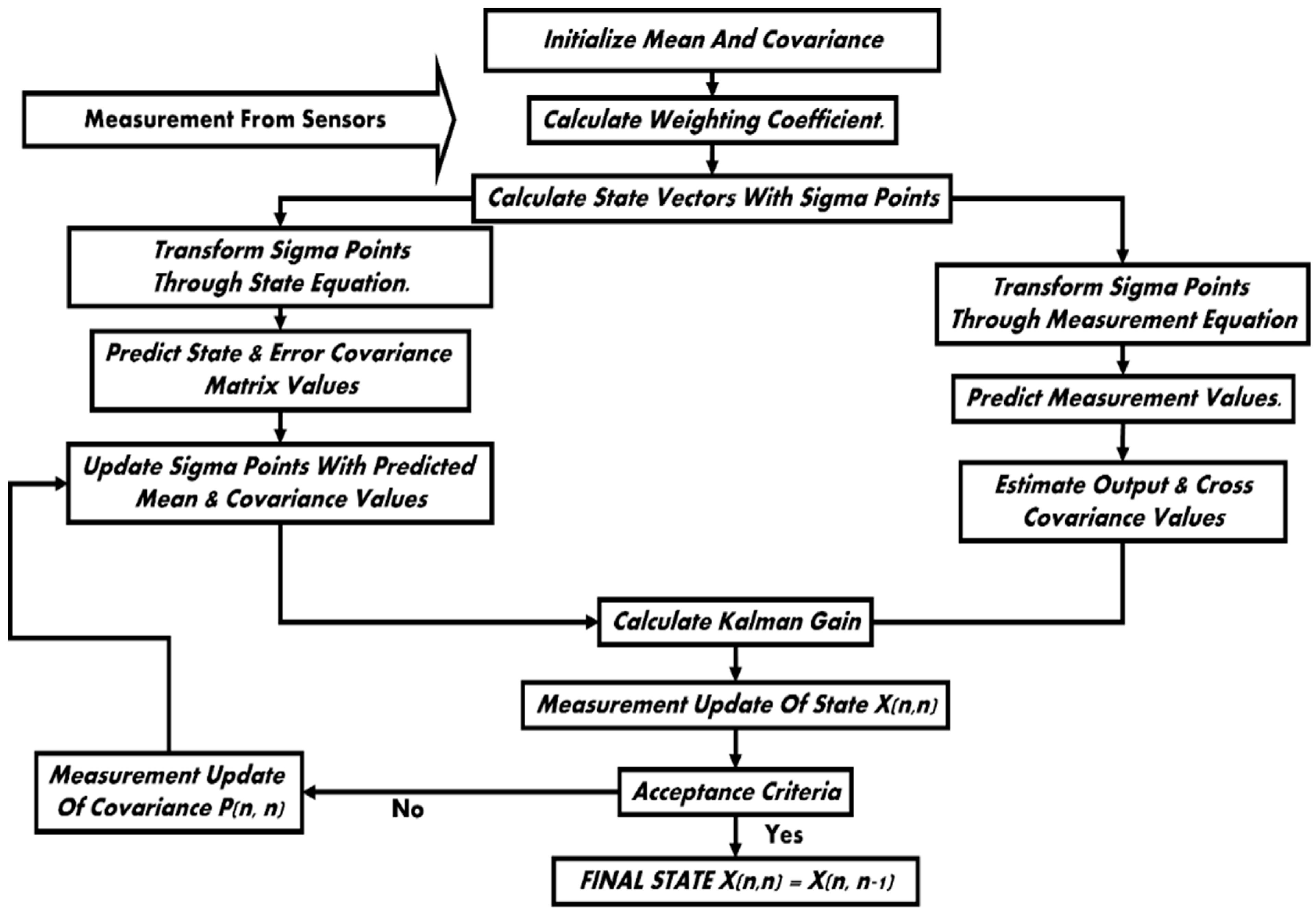
1.2. Significance of Unscented Kalman Filter
1.3. Significance of Machine Learning
1.4. Challenges with Assuming Standard Deviation: Exploring Alternative Approaches
2. Materials and Methods
2.1. Deep Neural Network Design
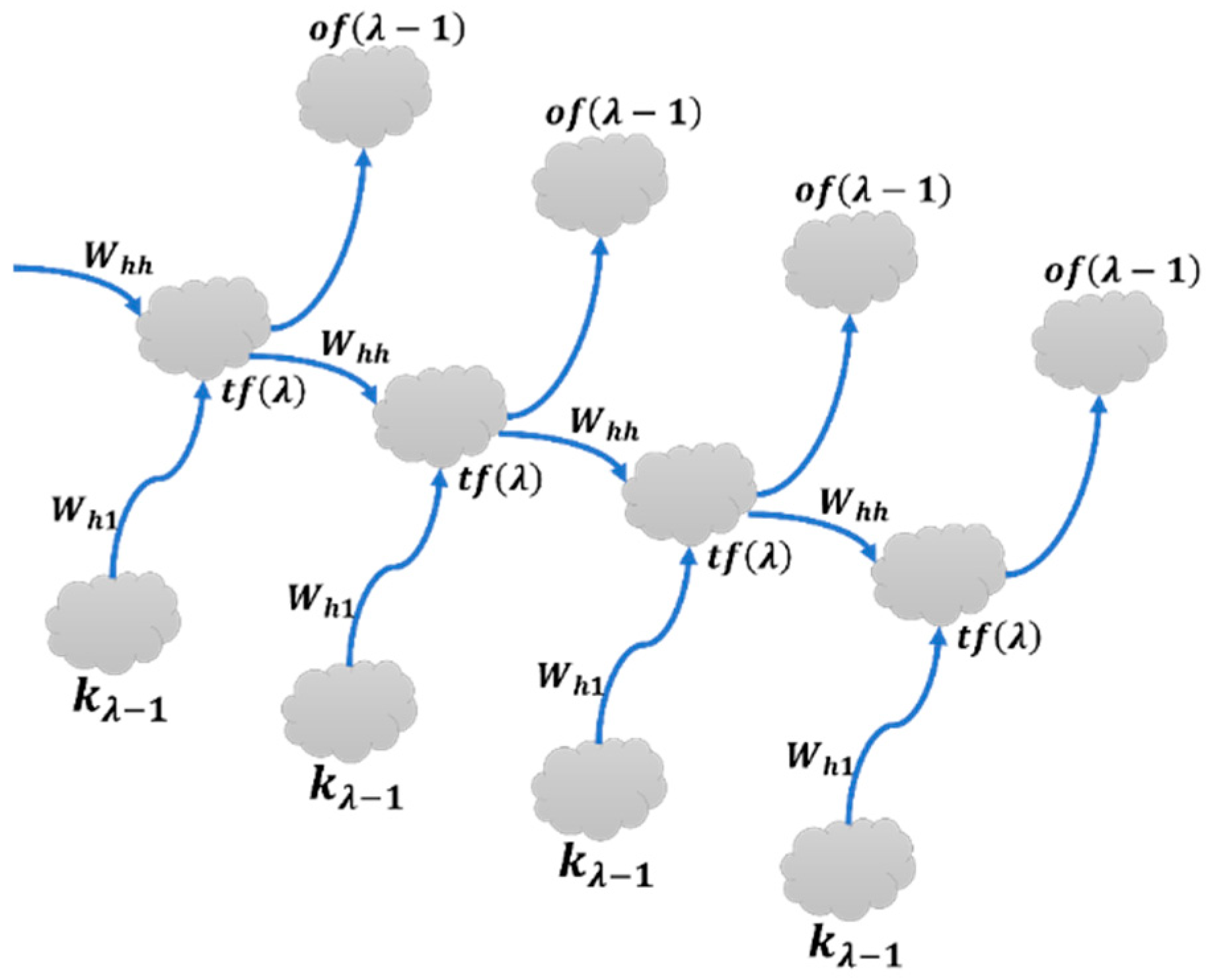
2.2. Recurrent Neural Network (RNN) Design
2.3. System Architectural Design
3. Simulation Analysis and Results
3.1. Model Training
3.1.1. Multilayer Perceptron (MLP)
3.1.2. Convolutional Neural Network (CNN)
3.1.3. Long Short-Term Memory (LSTM)
3.1.4. Gated Recurrent Unit (GRU)
3.2. Results of DL
Hybrid (DL-UKF)
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- James, R.J. A History of Radar. IEE Rev. 1989, 35, 343. [Google Scholar] [CrossRef]
- Cho, Y.S.; Cho, S.H. A Design of the Frequency Modulated Continuous Wave (FMCW) Radar System. In Proceedings of the 18th IEEE International Symposium on Consumer Electronics (ISCE 2014), Jeju, Republic of Korea, 22–25 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–2. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. New Extension of the Kalman Filter to Nonlinear Systems; Kadar, I., Ed.; SPIE: Berlin, Germany, 1997; p. 182. [Google Scholar]
- Koteswara Rao, S.; Kavitha Lakshmi, M.; Jahan, K.; Naga Divya, G.; Omkar Lakshmi Jagan, B. Acceptance Criteria of Bearings-Only Passive Target Tracking Solution. IETE J. Res. 2023, 69, 2874–2885. [Google Scholar] [CrossRef]
- Kumar, D.V.A.N.R.; Rao, S.K.; Raju, K.P. Integrated Unscented Kalman Filter for Underwater Passive Target Tracking with Towed Array Measurements. Optik 2016, 127, 2840–2847. [Google Scholar] [CrossRef]
- Divya, G.N.; Koteswara Rao, S. Implementation of Ensemble Kalman Filter Algorithm for Underwater Target Tracking. J. Control Decis. 2022, 1–10. [Google Scholar] [CrossRef]
- Divya, G.N.; Rao, S.K. Application and Comparison of Bayesian Framework Algorithms for Underwater State Estimation. In Proceedings of the 2019 International Symposium on Ocean Technology (SYMPOL), Ernakulam, India, 11–13 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 10–20. [Google Scholar]
- Ling, J. Target Tracking Using Kalman Filter Based Algorithms. J. Phys. Conf. Ser. 2021, 2078, 012020. [Google Scholar] [CrossRef]
- Divya, K.S.; Ramesh, K.S.; Rao, S.K.; Naga Divya, G. Underwater Object Tracking Using Unscented Kalman Filter. In Proceedings of the 2021 3rd International Conference on Advances in Computing, Communication Control and Networking (ICAC3N), Greater Noida, India, 17 December 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1729–1733. [Google Scholar]
- Rao, S.K.; Babu, V.S. Unscented Kalman Filter With Application To Bearings-Only Passive Manoeuvring Target Tracking. In Proceedings of the 2008 International Conference on Signal Processing, Communications and Networking, Chennai, India, 4–6 January 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 219–224. [Google Scholar]
- Xu, L.; Liu, C.; Yi, W.; Li, G.; Kong, L. A Particle Filter Based Track-before-Detect Procedure for Towed Passive Array Sonar System. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1460–1465. [Google Scholar]
- Sun, W.; Sun, M.; Zhang, X.; Li, M.; Wanchun, D. Moving Vehicle Detection and Tracking Based on Optical Flow Method and Immune Particle Filter under Complex Transportation Environments. Complexity 2020, 2020, 3805320. [Google Scholar] [CrossRef]
- Divya, G.N.; Rao, S.K. Application of Sigma Point Particle Filter Method for Passive State Estimation in Underwater. Def. Sci. J. 2021, 71, 507–514. [Google Scholar] [CrossRef]
- Wu, Q.; Chen, L.; Li, Y.; Wang, Z.; Yao, S.; Li, H. Reweighted Robust Particle Filtering Approach for Target Tracking in Automotive Radar Application. Remote Sens. 2022, 14, 5477. [Google Scholar] [CrossRef]
- Abdoul-Moaty, E.-S.; Abdoul-Shahid, T.R.; El-Din Sayed Hafez, A.; Abd-El-Latif, M. A Particle Filter for Mutistatic Radar Tracking. In Proceedings of the 2014 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–5. [Google Scholar]
- Ishtiaq, S.; Wang, X.; Hassan, S. Multi-Target Tracking Algorithm Based on 2-D Velocity Measurements Using Dual-Frequency Interferometric Radar. Electronics 2021, 10, 1969. [Google Scholar] [CrossRef]
- Fang, X.; Huang, D. Robust Adaptive Cubature Kalman Filter for Tracking Manoeuvring Target by Wireless Sensor Network under Noisy Environment. IET Radar Sonar Navig. 2023, 17, 179–190. [Google Scholar] [CrossRef]
- Xu, J.; Xu, M.; Zhou, X. The Bearing Only Target Tracking of UUV Based on Cubature Kalman Filter with Noise Estimator. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 5288–5293. [Google Scholar]
- Wang, X.; Zhang, X.; Gong, H.; Jiang, J.; Rai, H.M. A Flight Control Method for Unmanned Aerial Vehicles Based on Vibration Suppression. IET Collab. Intell. Manuf. 2021, 3, 252–261. [Google Scholar] [CrossRef]
- Nalini Santhosh, M.; Koteswara Rao, S.; Das, R.P.; Lova Raju, K. Underwater Target Tracking Using Unscented Kalman Filter. Indian. J. Sci. Technol. 2015, 8, 1–5. [Google Scholar] [CrossRef]
- You, D.; Liu, P.; Shang, W.; Zhang, Y.; Kang, Y.; Xiong, J. An Improved Unscented Kalman Filter Algorithm for Radar Azimuth Mutation. Int. J. Aerosp. Eng. 2020, 2020, 1–10. [Google Scholar] [CrossRef]
- Salcedo-Bosch, A.; Rocadenbosch, F.; Sospedra, J. A Robust Adaptive Unscented Kalman Filter for Floating Doppler Wind-LiDAR Motion Correction. Remote Sens. 2021, 13, 4167. [Google Scholar] [CrossRef]
- Ibe, O.C. Introduction to Descriptive Statistics. In Fundamentals of Applied Probability and Random Processes; Elsevier: Amsterdam, The Netherlands, 2014; pp. 253–274. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention Is All You Need. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; Guyon, I., Luxburg, U., Von Bengio, S., Eds.; Curran Associates, Inc.: New York, NY, USA, 2017; Volume 30. [Google Scholar]
- Yenduri, G.; Ramalingam, M.; Selvi, G.C.; Supriya, Y.; Srivastava, G.; Maddikunta, P.K.R.; Raj, G.D.; Jhaveri, R.H.; Prabadevi, B.; Wang, W.; et al. GPT (Generative Pre-Trained Transformer)—A Comprehensive Review on Enabling Technologies, Potential Applications, Emerging Challenges, and Future Directions. IEEE Access 2024, 12, 54608–54649. [Google Scholar] [CrossRef]
- Sufi, F. Generative Pre-Trained Transformer (GPT) in Research: A Systematic Review on Data Augmentation. Information 2024, 15, 99. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, B.; Zhang, L.; Ke, X.; Ding, H. Neural, Symbolic and Neural-Symbolic Reasoning on Knowledge Graphs. AI Open 2021, 2, 14–35. [Google Scholar] [CrossRef]
- Finn, C.; Abbeel, P.; Levine, S. Model-Agnostic Meta-Learning for Fast Adaptation of Deep Networks; PMLR: Birmingham, UK, 2017. [Google Scholar]
- Duan, R.; Li, D.; Tong, Q.; Yang, T.; Liu, X.; Liu, X. A Survey of Few-Shot Learning: An Effective Method for Intrusion Detection. Secur. Commun. Netw. 2021, 2021, 1–10. [Google Scholar] [CrossRef]
- Cho, K.; van Merrienboer, B.; Bahdanau, D.; Bengio, Y. On the Properties of Neural Machine Translation: Encoder–Decoder Approaches. In Proceedings of the SSST-8, Eighth Workshop on Syntax, Semantics and Structure in Statistical Translation, Doha, Qatar, 25 October 2014; Association for Computational Linguistics: Stroudsburg, PA, USA, 2014; pp. 103–111. [Google Scholar]
- Wulff, B.; Schuecker, J.; Bauckhage, C. SPSA for Layer-Wise Training of Deep Networks; Springer: Berlin/Heidelberg, Germany, 2018; pp. 564–573. [Google Scholar]
- Oktay, T.; Kose, O. Quadrotor Flight System Design Using Collective and Differential Morphing with SPSA and ANN. Int. J. Intell. Syst. Appl. Eng. 2021, 9, 159–164. [Google Scholar] [CrossRef]
- Oktay, T.; Kose, O. Hexarotor Longitudinal Flight Control with Deep Neural Network, PID Algorithm and Morphing. Eur. J. Sci. Technol. 2021, 27, 115–124. [Google Scholar] [CrossRef]
- Gao, C.; Liu, H.; Zhou, S.; Su, H.; Chen, B.; Yan, J.; Yin, K. Maneuvering Target Tracking with Recurrent Neural Networks for Radar Application. In Proceedings of the 2018 International Conference on Radar (RADAR), Brisbane, QLD, Australia, 27–31 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Ramchoun, H.; Amine, M.; Idrissi, J.; Ghanou, Y.; Ettaouil, M. Multilayer Perceptron: Architecture Optimization and Training. Int. J. Interact. Multimed. Artif. Intell. 2016, 4, 26. [Google Scholar] [CrossRef]
- Rai, H.M.; Chatterjee, K. A Novel Adaptive Feature Extraction for Detection of Cardiac Arrhythmias Using Hybrid Technique MRDWT & MPNN Classifier from ECG Big Data. Big Data Res. 2018, 12, 13–22. [Google Scholar] [CrossRef]
- Rai, H.M.; Trivedi, A.; Shukla, S. ECG Signal Processing for Abnormalities Detection Using Multi-Resolution Wavelet Transform and Artificial Neural Network Classifier. Measurement 2013, 46, 3238–3246. [Google Scholar] [CrossRef]
- Goyal, Y.R.; Rai, H.M.; Aggarwal, M.; Saxena, K.; Amanzholova, S. Revolutionizing Skin Cancer Detection: A Comprehensive Review of Deep Learning Methods. In Proceedings of the Proceedings of the 5th International Conference on Information Management & Machine Intelligence, Jaipur, India, 23 November 2023; ACM: New York, NY, USA, 2023; pp. 1–6. [Google Scholar]
- Rai, H.M.; Chatterjee, K.; Gupta, A.; Dubey, A. A Novel Deep CNN Model for Classification of Brain Tumor from MR Images. In Proceedings of the 2020 IEEE International Conference for Convergence in Engineering, ICCE 2020-Proceedings, Kolkata, India, 5 September 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 134–138. [Google Scholar]
- Rai, H.M.; Chatterjee, K.; Dubey, A.; Srivastava, P. Myocardial Infarction Detection Using Deep Learning and Ensemble Technique from ECG Signals. In Proceedings of the Second International Conference on Computing, Communications, and Cyber-Security. Lecture Notes in Networks and Systems, Ghaziabad, India, 3–4 October 2020; Springer: Singapore, 2020; Volume 203, pp. 717–730. [Google Scholar]
- Rai, H.M.; Chatterjee, K.; Mukherjee, C. Hybrid CNN-LSTM Model for Automatic Prediction of Cardiac Arrhythmias from ECG Big Data. In Proceedings of the 2020 IEEE 7th Uttar Pradesh Section International Conference on Electrical, Electronics and Computer Engineering (UPCON), Prayagraj, India, 27 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Albawi, S.; Mohammed, T.A.; Al-Zawi, S. Understanding of a Convolutional Neural Network. In Proceedings of the 2017 International Conference on Engineering and Technology (ICET), Antalya, Turkey, 21–24 August 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Rai, H.M.; Chatterjee, K.; Dashkevich, S. Automatic and Accurate Abnormality Detection from Brain MR Images Using a Novel Hybrid UnetResNext-50 Deep CNN Model. Biomed. Signal Process Control 2021, 66, 102477. [Google Scholar] [CrossRef]
- Rai, H.M.; Chatterjee, K.; Dashkevych, S. The Prediction of Cardiac Abnormality and Enhancement in Minority Class Accuracy from Imbalanced ECG Signals Using Modified Deep Neural Network Models. Comput. Biol. Med. 2022, 150. [Google Scholar] [CrossRef]
- Rai, H.M.; Chatterjee, K. Detection of Brain Abnormality by a Novel Lu-Net Deep Neural CNN Model from MR Images. Mach. Learn. Appl. 2020, 2, 100004. [Google Scholar] [CrossRef]
- Wibawa, A.P.; Utama, A.B.P.; Elmunsyah, H.; Pujianto, U.; Dwiyanto, F.A.; Hernandez, L. Time-Series Analysis with Smoothed Convolutional Neural Network. J. Big Data 2022, 9, 44. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (m) | (deg) | (deg) | (m) | (deg) | (m/s) | (m/s) | (deg) | (deg) | (deg) | (deg) | (deg) | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 13.949 | 0.03174 | 0.482 | 58,364 | 271 | 497 | 34 | 76.694 | 270.0 | 65 | 300.0 | 54.5 |
| 2 | 14.754 | 0.04715 | 0.477 | 48,773 | 154 | 275 | 26 | 57.621 | 89.99 | 53 | 119.9 | 116.4 |
| … | … | … | … | … | … | … | … | … | … | … | … | |
| 299 | 11.833 | 0.0375 | 0.617 | 56,903 | 66 | 400 | 35 | 68.734 | 90.00 | 53 | 60.00 | 64.5 |
| 300 | 14.718 | 0.0399 | 0.0794 | 48,641 | 33 | 405 | 37 | 51.063 | 89.99 | 120 | 119.9 | 124.5 |
| Criteria | Single Monte Carlo Run | 100 Monte Carlo Runs |
|---|---|---|
| Range Error | % of true range | % of true range |
| Course Error | ° | |
| Speed Error | m/s | m/s |
| Pitch Error | ° |
| Parameters | MSE | |||
|---|---|---|---|---|
| MLP | CNN | LSTM | GRU | |
| (in m) | 1.45124 | 0.54328 | 0.3335 | |
| (in deg) | ||||
| (in deg) | ||||
| (m) | (deg) | (deg) | (m) | (deg) | (m/s) | (m/s) | (deg) | (deg) | (deg) | (deg) | (deg) | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 11.4183 | 0.0576 | 0.073 | 49,076 | 44 | 319 | 41 | 68 | 89.90 | 120 | 119 | 116.4 |
| 2 | 13.2466 | 0.0424 | 0.041 | 45,972 | 268 | 507 | 33 | 54 | 269.9 | 100 | 239 | 115.5 |
| 3 | 12.4102 | 0.0617 | 0.071 | 56,902 | 330 | 213 | 38 | 76 | 270.0 | 60 | 300 | 55.5 |
| 4 | 9.8108 | 0.0448 | 0.085 | 47,861 | 137 | 651 | 31 | 43 | 90.00 | 53 | 60 | 56.4 |
| 5 | 11.6255 | 0.0821 | 0.076 | 57,338 | 351 | 287 | 37 | 58 | 270.0 | 65 | 300 | 63.6 |
| SN | UKF | MLP | CNN | LSTM | GRU | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C | S | P | TC | C | S | P | TC | Dif | C | S | P | TC | Dif | C | S | P | TC | Dif | C | S | P | TC | Dif | |
| 1 | 109 | 230 | 85 | 230 | 99 | 177 | 46 | 177 | 53 | 113 | 197 | 57 | 197 | 33 | 113 | 185 | 49 | 185 | 45 | 106 | 192 | 57 | 192 | 38 |
| 2 | 30 | 167 | 59 | 167 | 28 | 170 | 72 | 170 | 3 | 29 | 187 | 83 | 187 | 20 | 30 | 166 | 68 | 166 | 1 | 30 | 173 | 69 | 173 | 6 |
| 3 | 40 | 196 | 40 | 196 | 122 | 186 | 20 | 186 | 10 | 123 | 184 | 20 | 184 | 12 | 136 | 199 | 39 | 199 | 3 | 128 | 190 | 20 | 190 | 6 |
| 4 | 116 | 184 | 68 | 184 | 130 | 209 | 40 | 209 | 25 | 129 | 207 | 53 | 207 | 23 | 95 | 186 | 52 | 186 | 2 | 115 | 196 | 49 | 196 | 12 |
| 5 | 145 | 253 | 63 | 253 | 127 | 224 | 51 | 224 | 29 | 127 | 224 | 51 | 224 | 29 | 152 | 262 | 64 | 262 | 9 | 145 | 252 | 62 | 252 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Patrick, U.; Rao, S.K.; Jagan, B.O.L.; Rai, H.M.; Agarwal, S.; Pak, W. Radar-Based Target Tracking Using Deep Learning Approaches with Unscented Kalman Filter. Appl. Sci. 2024, 14, 8332. https://doi.org/10.3390/app14188332
Patrick U, Rao SK, Jagan BOL, Rai HM, Agarwal S, Pak W. Radar-Based Target Tracking Using Deep Learning Approaches with Unscented Kalman Filter. Applied Sciences. 2024; 14(18):8332. https://doi.org/10.3390/app14188332
Chicago/Turabian StylePatrick, Uwigize, S. Koteswara Rao, B. Omkar Lakshmi Jagan, Hari Mohan Rai, Saurabh Agarwal, and Wooguil Pak. 2024. "Radar-Based Target Tracking Using Deep Learning Approaches with Unscented Kalman Filter" Applied Sciences 14, no. 18: 8332. https://doi.org/10.3390/app14188332