
Prediction and Control of Broadband Noise Associated with Advanced Air Mobility—A Review



Abstract
:1. Introduction
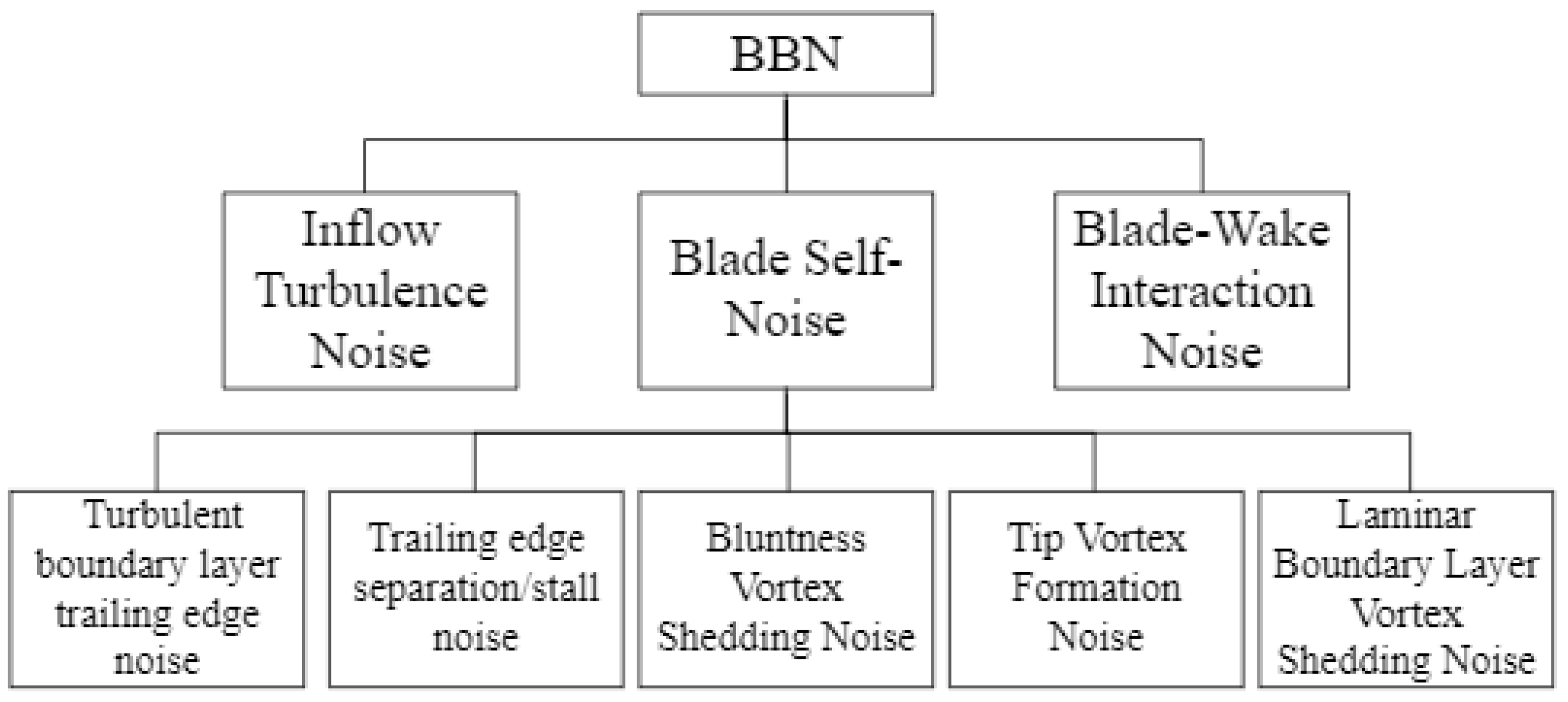
2. Sources/Types of BBN
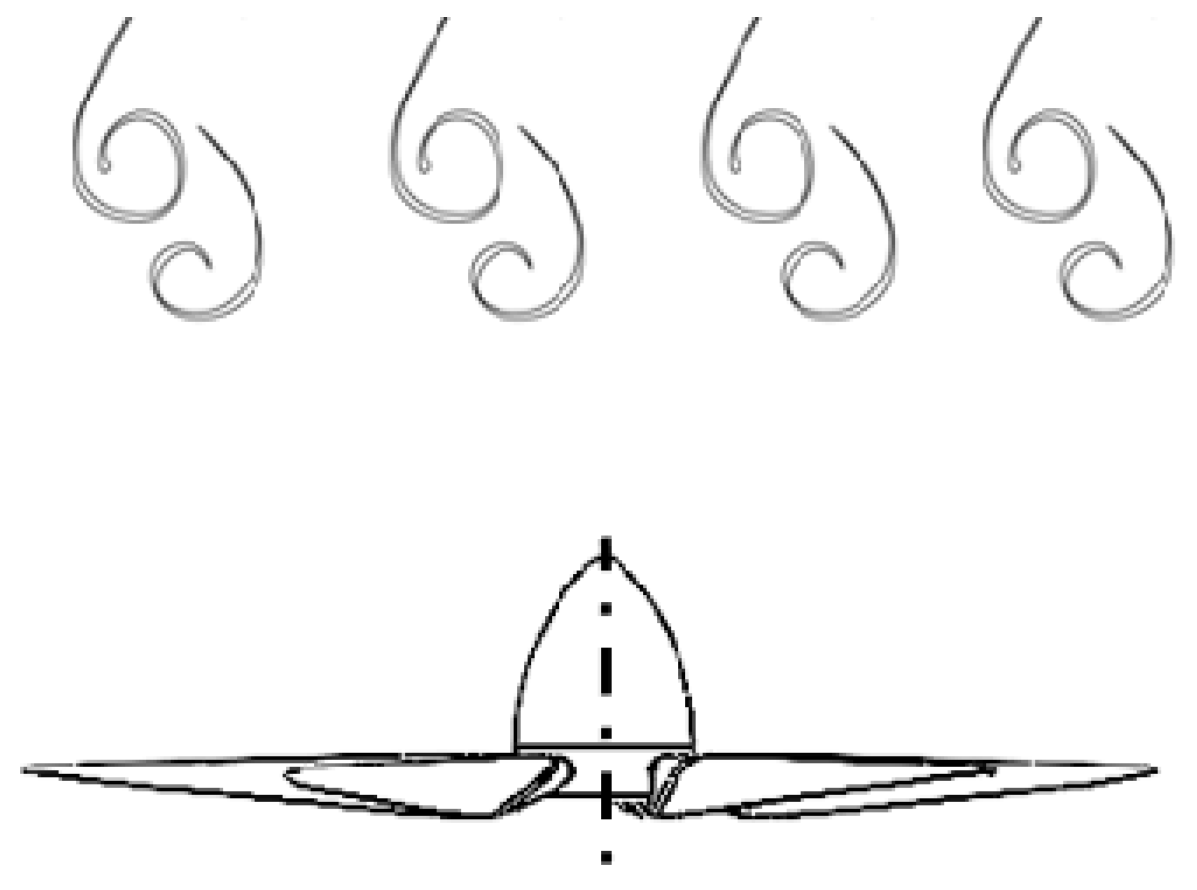
2.1. Inflow Turbulence Noise
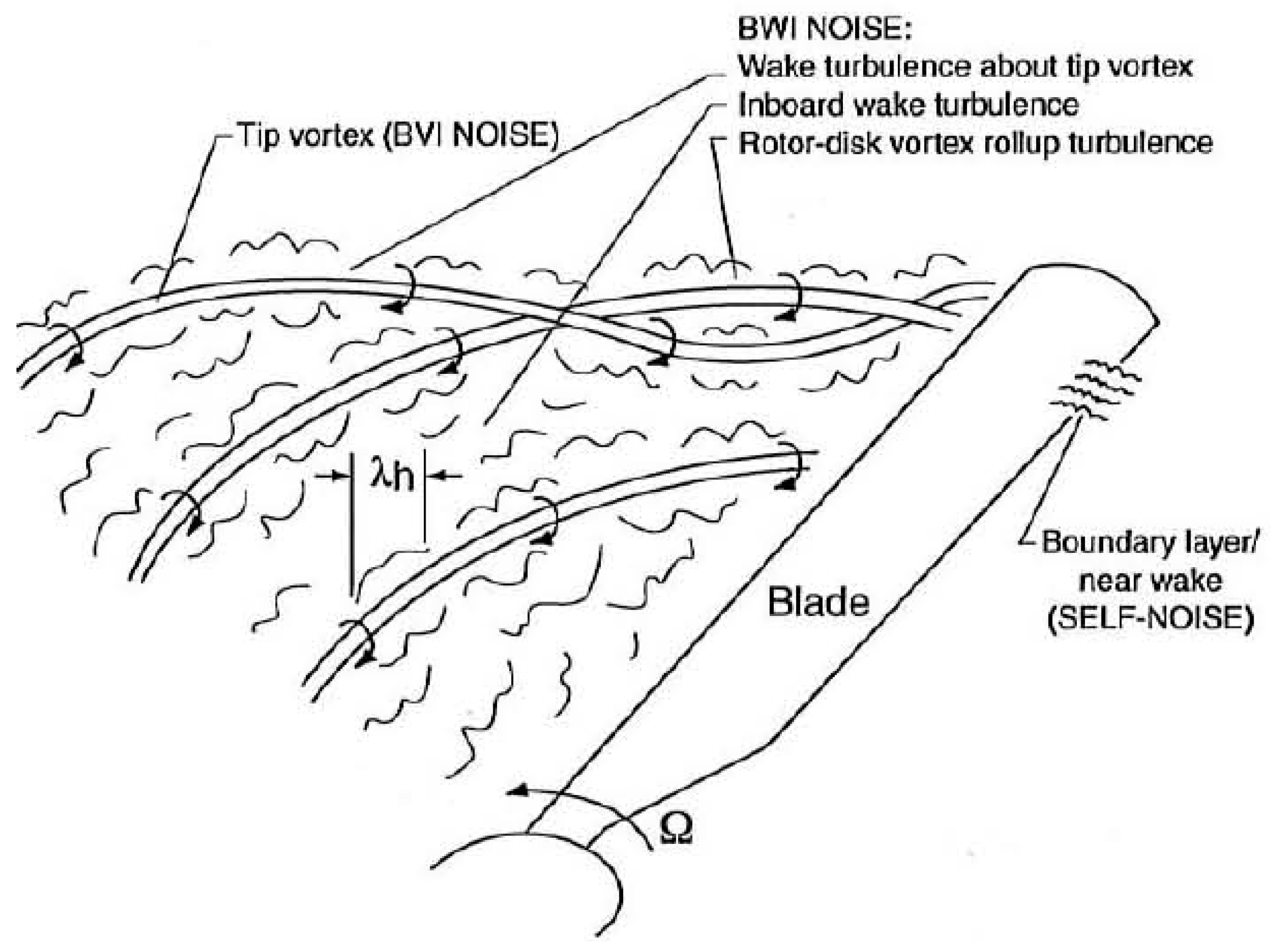
2.2. Blade–Wake Interaction Noise
2.3. Blade Self-Noise
3. Methods for Prediction of BBN
3.1. Experimental Observations
3.2. BBN Prediction Models
3.3. Low-Fidelity Methods
3.4. Numerical Methods
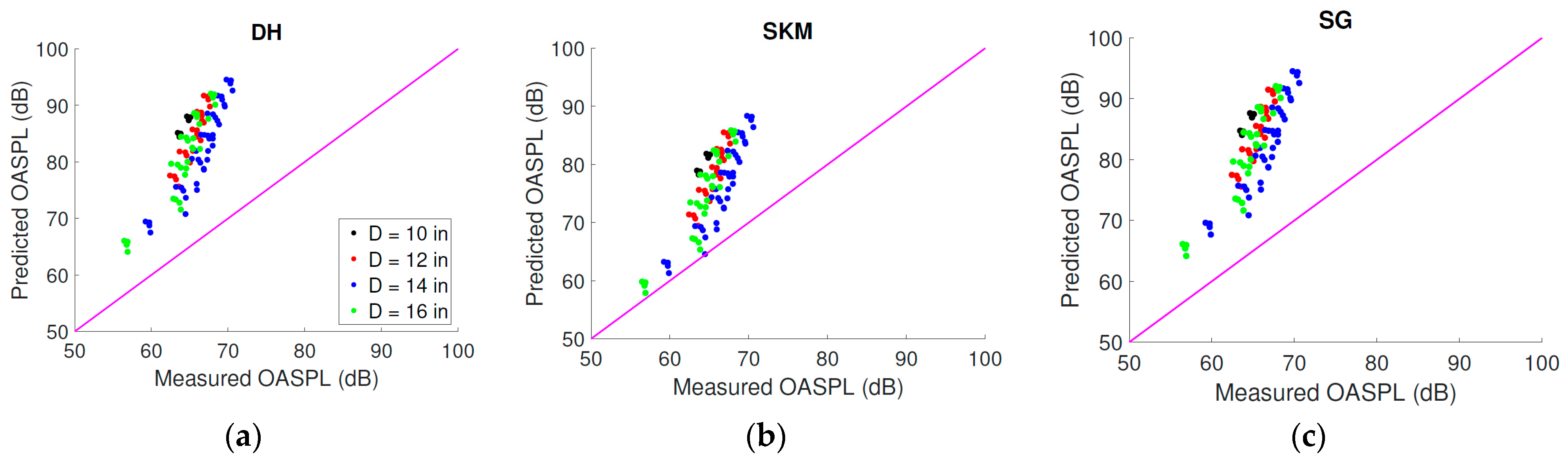
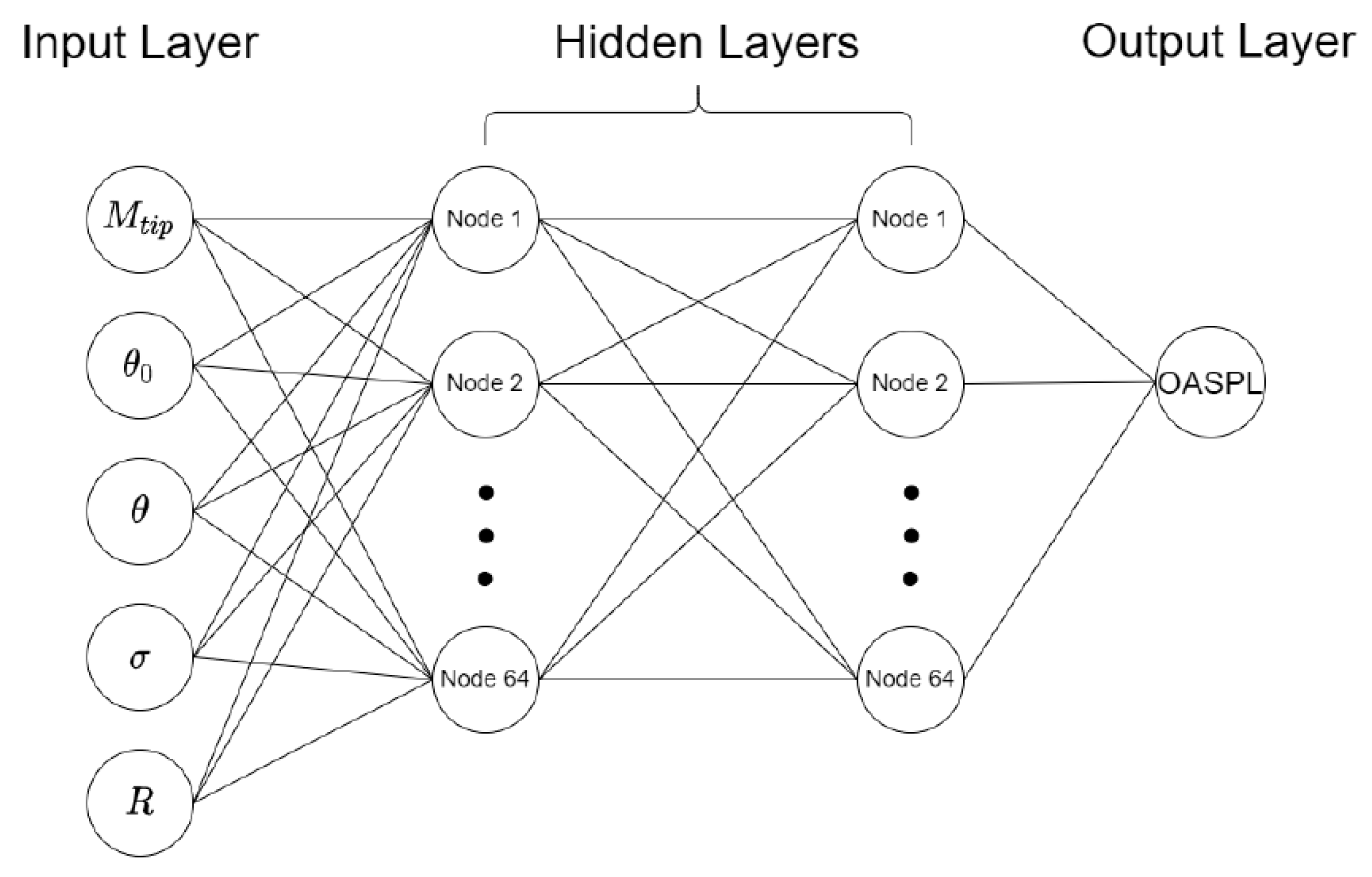
3.5. Machine Learning
4. Passive Reduction of BBN
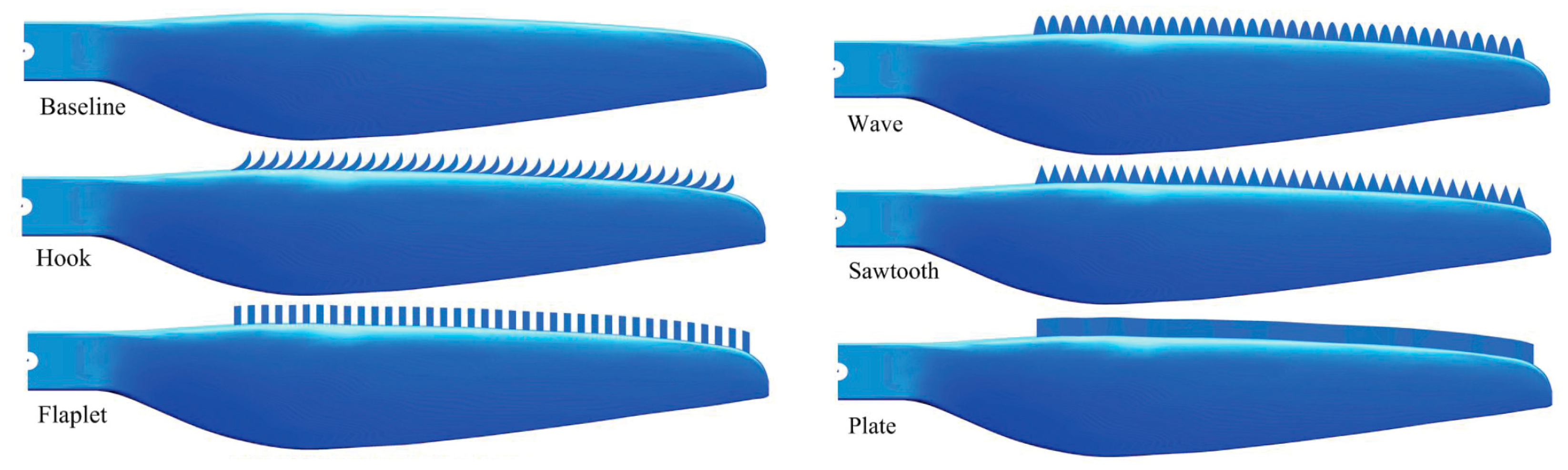
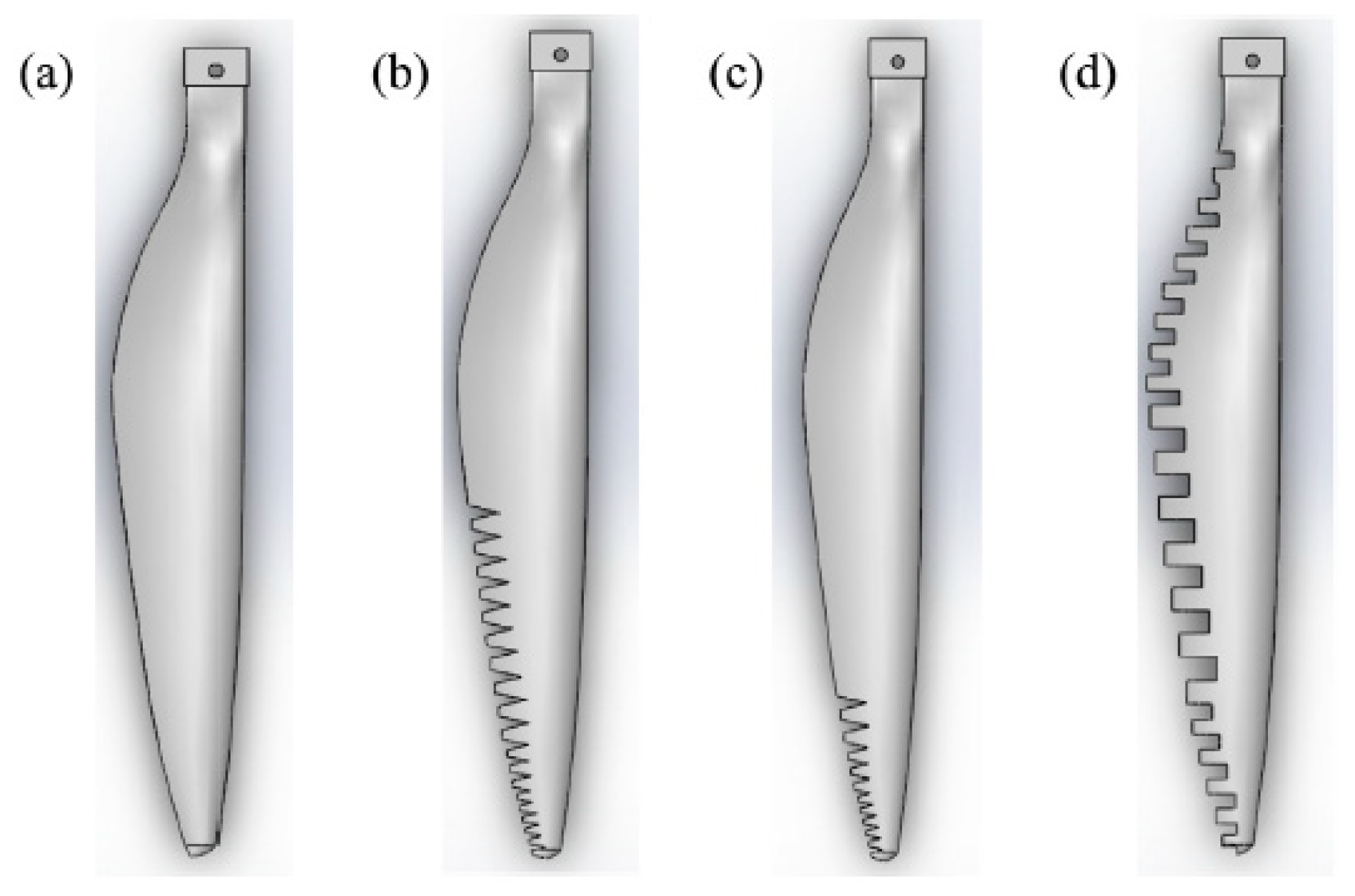
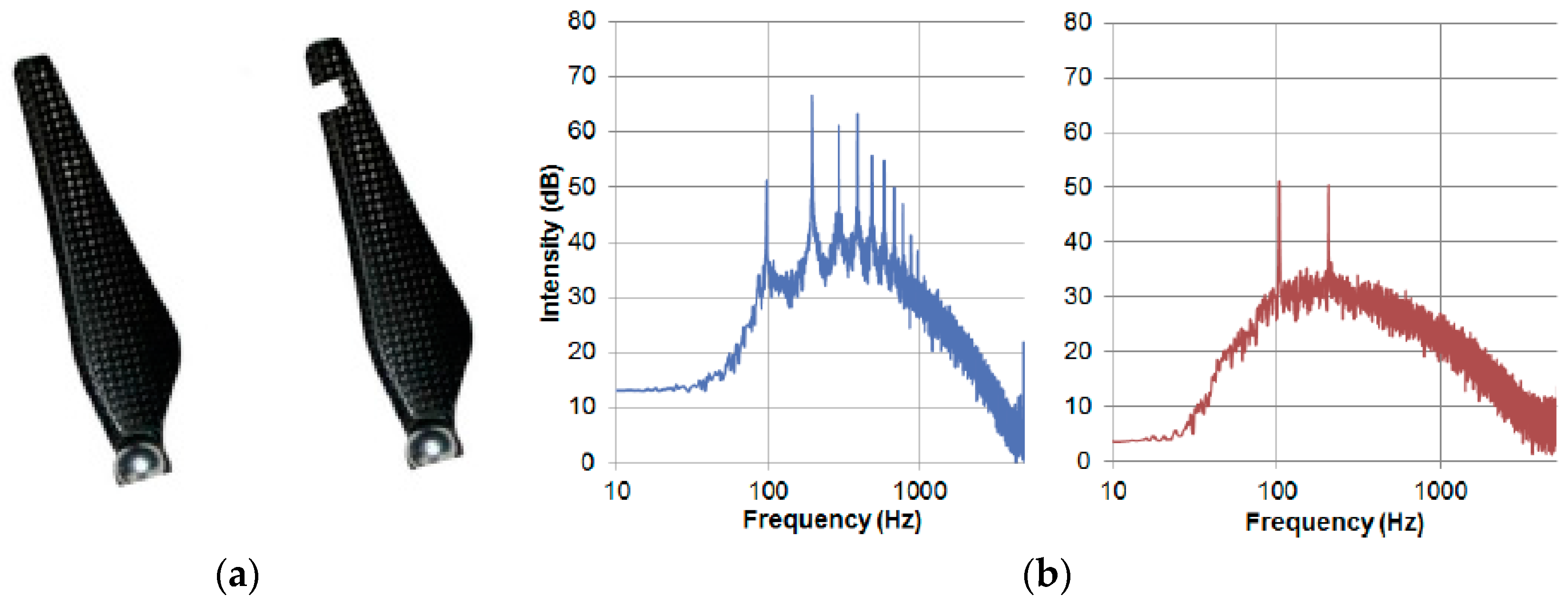
4.1. Leading- and Trailing-Edge Serrations
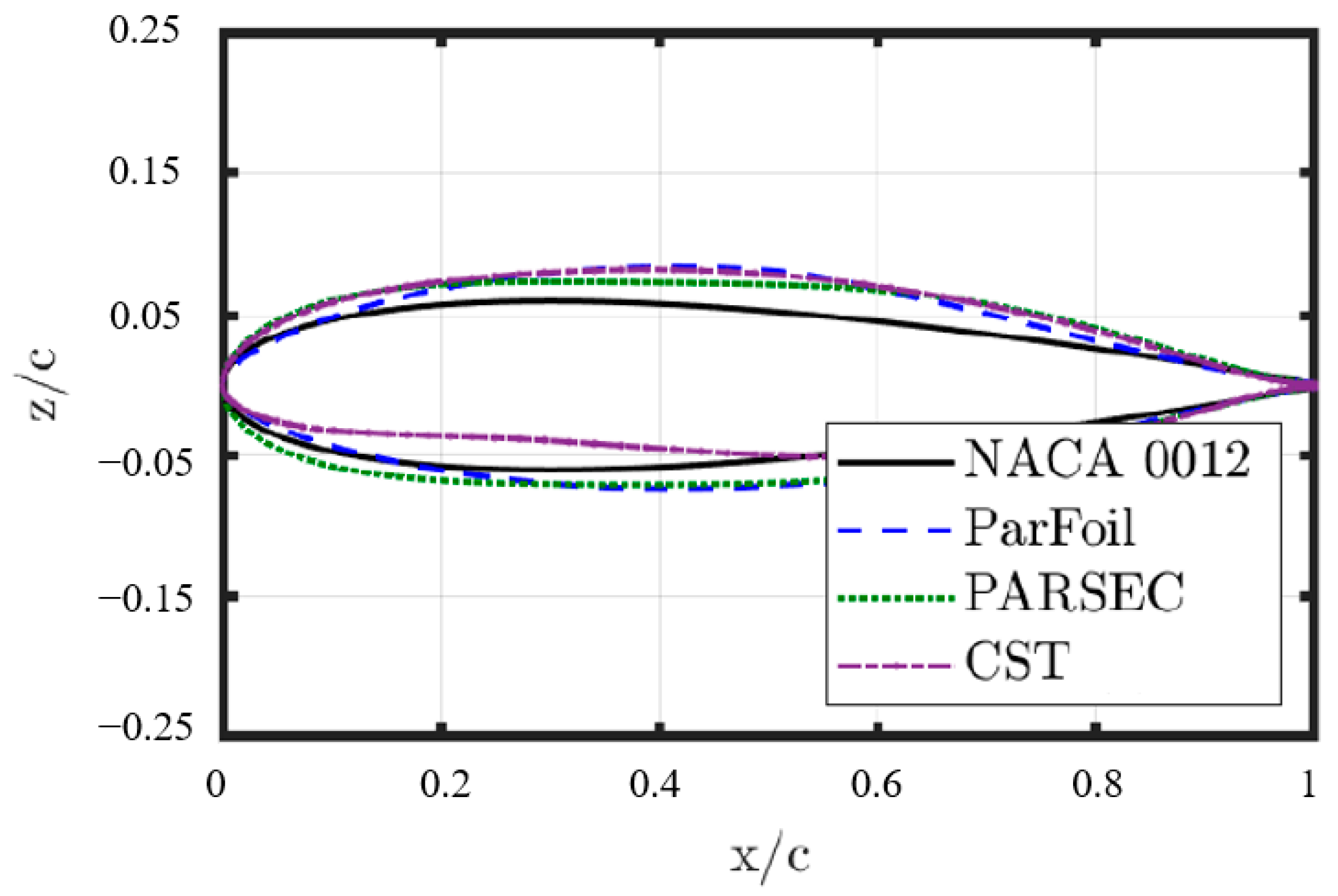
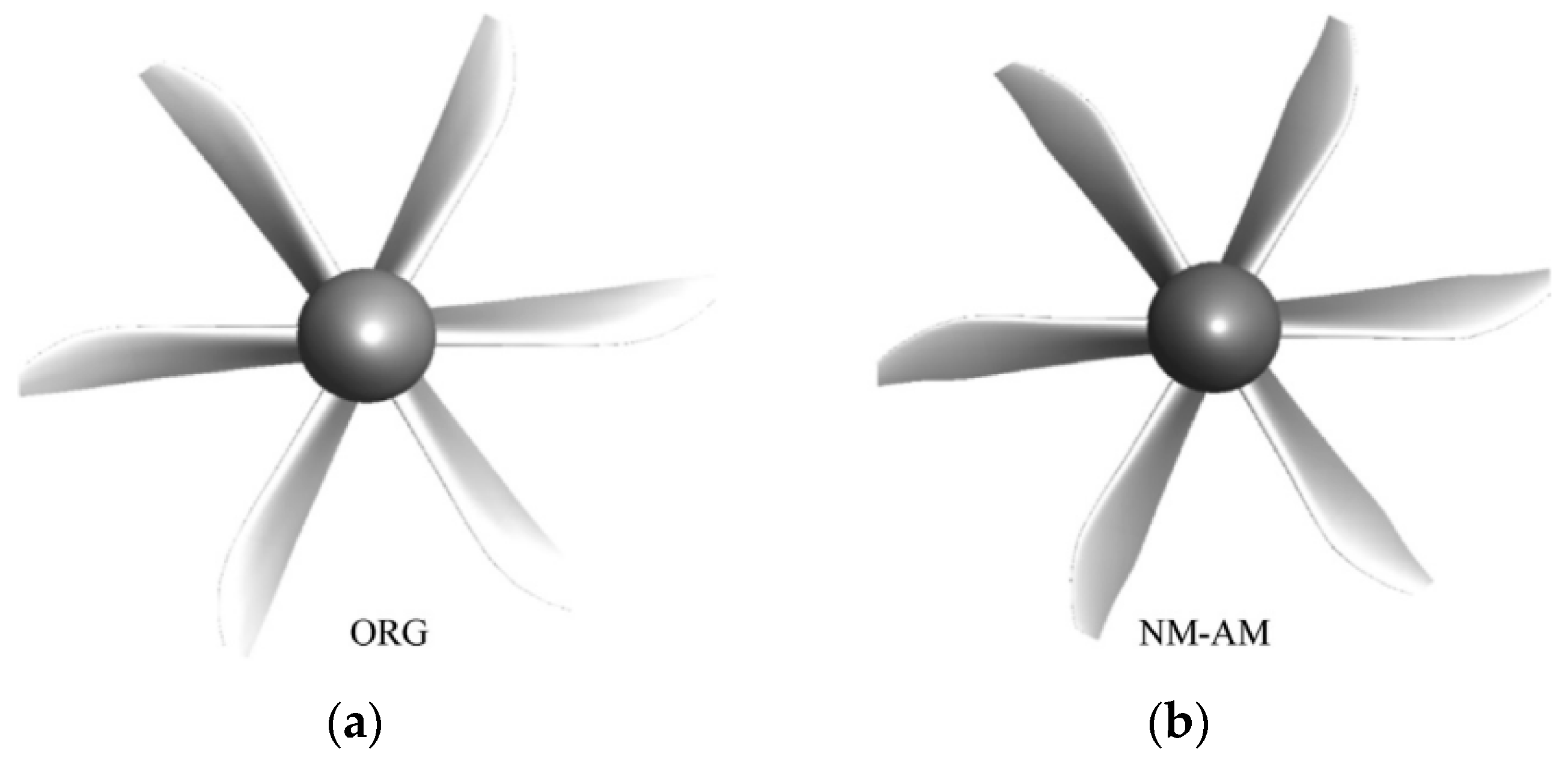
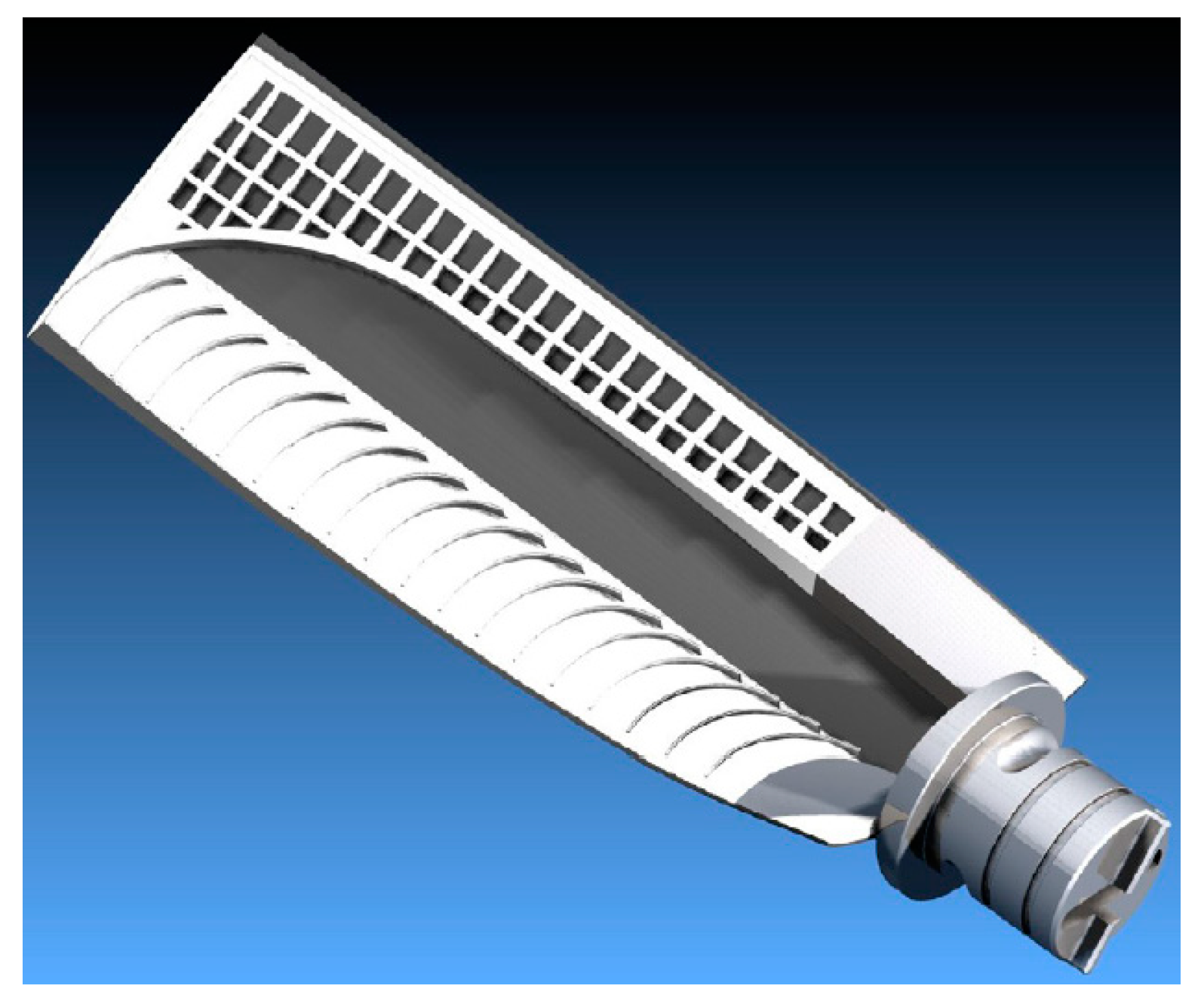
4.2. Airfoil or Blade Shape Design
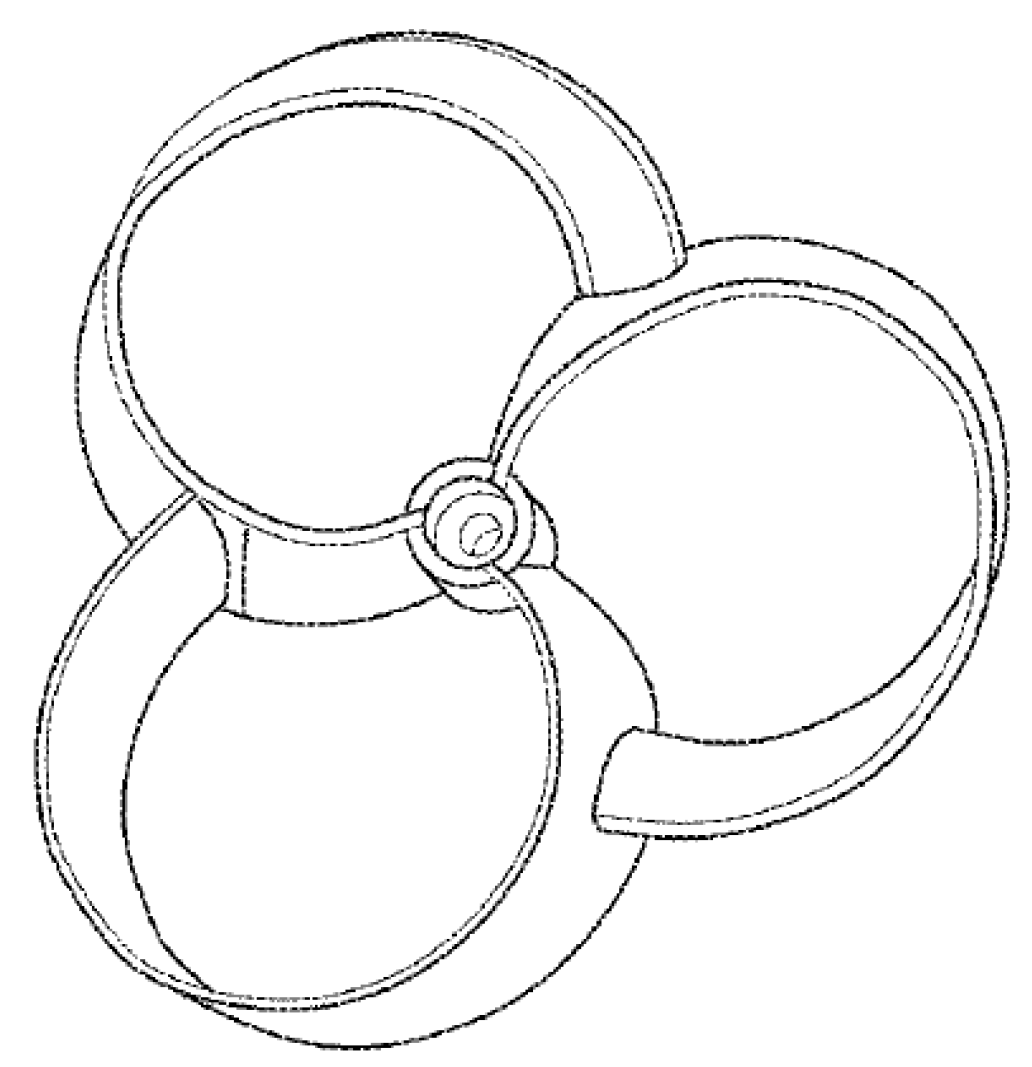
4.3. Other Ideals
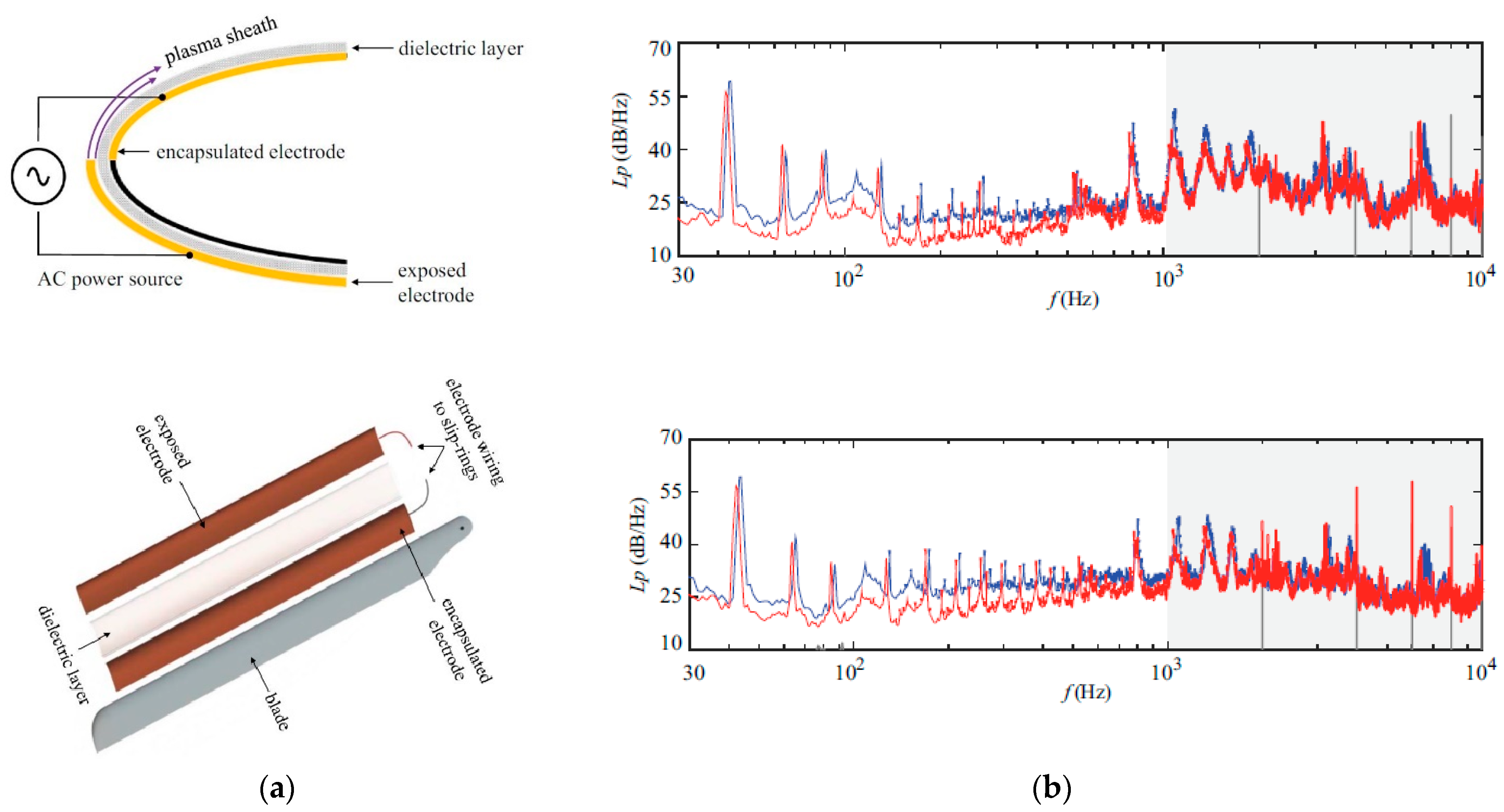
5. Active Noise Control Technologies of BBN
6. Discussion
7. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hua, J. Shape Optimization of a Fan Duncte for a Vertical Takeoff and Landing. Master’s Thesis, The University of Texas at Arlington, Arlington, TX, USA, 2018. Available online: https://mavmatrix.uta.edu/mechaerospace_theses/729/ (accessed on 20 August 2018).
- Patterson, M. Advanced air mobility (AAM): Overview and integration considerations. In Proceedings of the Virginia Aviation Conference, Norfolk, VA, USA, 17–20 August 2021. [Google Scholar]
- Federal Aviation Administration. Noise Certification Standards: Matternet Model M2 Aircraft. Federal Register. 2022. Available online: https://www.federalregister.gov/documents/2022/09/12/2022-19639/noise-certification-standards-matternet-model-m2-aircraft (accessed on 12 September 2022).
- Brooks, T.F.; Pope, D.S.; Marcolini, M.A. Airfoil Self-Noise and Prediction (No. L-16528). 1989. Available online: http://ntrs.nasa.gov/citations/19890016302 (accessed on 6 September 2013).
- Greenwood, E.; Brentner, K.S.; Rau, R.F.; Ted Gan, Z.F. Challenges and opportunities for low noise electric aircraft. Int. J. Aeroacoust. 2022, 21, 315–381. [Google Scholar] [CrossRef]
- Hanson, D.B. Spectrum of rotor noise caused by atmospheric turbulence. J. Acoust. Soc. Am. 1974, 56, 110–126. [Google Scholar] [CrossRef]
- Amiet, R.K. Noise Produced by Turbulent Flow into a Rotor: Theory Manual for Noise Calculation (No. NAS 1.26: 181788). 1989. Available online: http://ntrs.nasa.gov/citations/19890017312 (accessed on 6 September 2013).
- Brooks, T.F.; Marcolini, M.A.; Pope, D.S. Main rotor broadband noise study in the DNW. J. Am. Helicopter Soc. 1989, 34, 3–12. [Google Scholar] [CrossRef]
- Su Jung, Y.; Baeder, J.; He, C. Empirical Rotor Broadband Noise Prediction Using CFD Boundary Layer Parameter Extraction. J. Am. Helicopter Soc. 2023, 68, 32010–32022. [Google Scholar] [CrossRef]
- Burley, C.L.; Brooks, T.F. Rotor broadband noise prediction with comparison to model data. J. Am. Helicopter Soc. 2004, 49, 28–42. [Google Scholar] [CrossRef]
- Yauwenas, Y.; Fischer, J.R.; Moreau, D.; Doolan, C.J. The effect of inflow disturbance on drone propeller noise. In Proceedings of the 25th AIAA/CEAS Aeroacoustics Conference, Delft, The Netherlands, 20–23 May 2019. [Google Scholar] [CrossRef]
- Castelucci, L.A.; Venner, C.H.; de Santana, L.D. Experimental analysis of the noise of small propellers subjected to non-uniform inflow. In Proceedings of the AIAA SciTech 2023 Forum, National Harbor, MD, USA, 23–27 January 2023. [Google Scholar] [CrossRef]
- Bowen, L.; Turhan, B.; Kamliya Jawahar, H.; Rezgui, D.; Azarpeyvand, M. Aeroacoustic characteristics of distributed electric propulsion configuration with turbulent flows. In Proceedings of the AIAA AVIATION 2023 Forum, San Diego, CA, USA, 12–16 June 2023. [Google Scholar] [CrossRef]
- Jamaluddin, N.S.; Celik, A.; Baskaran, K.; Rezgui, D.; Azarpeyvand, M. Experimental analysis of a propeller noise in turbulent flow. Phys. Fluids 2023, 35, 075106. [Google Scholar] [CrossRef]
- Jamaluddin, N.S.; Celik, A.; Baskaran, K.; Rezgui, D.; Azarpeyvand, M. Experimental Analysis of Rotor Blade Noise in Edgewise Turbulence. Aerospace 2023, 10, 502. [Google Scholar] [CrossRef]
- Zaman, I.; Falsi, M.; Zang, B.; Azarpeyvand, M.; Camussi, R. Experimental parametric investigation of the haystacking phenomenon for propeller boundary layer ingestion. In Proceedings of the AIAA AVIATION 2023 Forum, San Diego, CA, USA, 12–16 June 2023. [Google Scholar] [CrossRef]
- Jamaluddin, N.S.; Celik, A.; Baskaran, K.; Rezgui, D.; Azarpeyvand, M. Aerodynamic noise analysis of tilting rotor in edgewise flow conditions. J. Sound Vib. 2024, 582, 118423. [Google Scholar] [CrossRef]
- Zawodny, N.; Pettingill, N. Acoustic Wind Tunnel Measurements of a Quadcopter in Hover and Forward Flight Conditions. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Chicago, IL, USA, 26–29 August 2018; Volume 258, pp. 487–500. [Google Scholar]
- Paruchuri, C.; Palleja-Cabre, S.; Joseph, P.; Akiwate, D.C.; Westcott, O.; Ferraro, M. Aeroacoustics source mechanisms of fixed-wing VTOL configuration. In Proceedings of the AIAA AVIATION 2023 Forum, San Diego, CA, USA, 12–16 June 2023. [Google Scholar] [CrossRef]
- Chen, M.; Hua, J.; Maier, N.; Burdette, D. Acoustic measurements in single-rotor/wing interaction at low disk loading and Reynolds number. Int. J. Aeroacoust. 2024, 23, 20–37. [Google Scholar] [CrossRef]
- Intaratep, N.; Alexander, W.N.; Devenport, W.J.; Grace, S.M.; Dropkin, A. Experimental study of quadcopter acoustics and performance at static thrust conditions. In Proceedings of the 22nd AIAA/CEAS Aeroacoustics Conference, Lyon, France, 30 May–1 June 2016. [Google Scholar] [CrossRef]
- Amiet, R.K. Noise due to turbulent flow past a trailing edge. J. Sound Vib. 1976, 47, 387–393. [Google Scholar] [CrossRef]
- Schlinker, R.H.; Amier, R.K. Helicopter rotor trailing edge noise. In Proceedings of the 7th AIAA Aeroacoustics Conference, Palo Alto, CA, USA, 5–7 October 1981. [Google Scholar]
- Sinayoko, S.; Kingan, M.; Agarwal, A. Trailing edge noise theory for rotating blades in uniform flow. Proc. R. Soc. A Math. Phys. Eng. Sci. 2013, 469, 20130065. [Google Scholar] [CrossRef]
- Ffowcs-Williams, J.F.; Hawkings, D.L. Sound generation by turbulence and surfaces in arbitrary motion. Philosophical Transactions for the Royal Society of London. Ser. A Math. Phys. Sci. 1969, 264, 321–342. [Google Scholar] [CrossRef]
- Farassat, F. Linear acoustic formulas for calculation of rotating blade noise. AIAA J. 1981, 19, 1122–1130. [Google Scholar] [CrossRef]
- Casper, J.; Farassat, F. A new time domain formulation for broadband noise predictions. Int. J. Aeroacoust. 2002, 1, 207–240. [Google Scholar] [CrossRef]
- Casper, J.; Farassat, F. Broadband trailing edge noise predictions in the time domain. J. Sound Vib. 2004, 271, 159–176. [Google Scholar] [CrossRef]
- Farassat, F.; Casper, J. Broadband noise prediction when turbulence simulation is available-Derivation of Formulation 2B and its statistical analysis. J. Sound Vib. 2012, 331, 2203–2208. [Google Scholar] [CrossRef]
- Davidson, I.M.; Harcest, T.J. Helicopter noise. Aeronaut. J. 1965, 69, 325–336. [Google Scholar] [CrossRef]
- Schlegel, R.; King, R.; Mull, H. Helicopter rotor noise generation and propagation. In US Army Aviation Materiel Laboratories; US Army Garrisons: Fort Eustis, VA, USA, 1966. [Google Scholar]
- Stuckey, T.J.; Goddard, J.O. Investigation and prediction of helicopter rotor noise part I. Wessex whirl tower results. J. Sound Vib. 1967, 5, 50–80. [Google Scholar] [CrossRef]
- Gill, H.; Lee, S. Development of New Empirical Rotor Broadband Noise Prediction Models for Urban Air Mobility Applications. In Proceedings of the AIAA SciTech 2024 Forum, Orlando, FL, USA, 8–12 January 2024. [Google Scholar] [CrossRef]
- Weir, D.S.; Jumper, S.J.; Burley, C.L.; Golub, R.A. Aircraft Noise Prediction Program Theoretical Manual: Rotorcraft System Noise Prediction System (ROTONET), part 4 (No. NASA-TM-83199-PT-4). 1995. Available online: http://ntrs.nasa.gov/citations/19950019972 (accessed on 6 September 2013).
- Brooks, T.F.; Marcolini, M.A. Airfoil tip vortex formation noise. AIAA J. 1986, 24, 246–252. [Google Scholar] [CrossRef]
- Grosveld, F.W. Prediction of broadband noise from horizontal axis wind turbines. J. Propuls. Power 1985, 1, 292–299. [Google Scholar] [CrossRef]
- Li, S.; Lee, S. UCD-QuietFly: A new program to predict multi-rotor eVTOL broadband noise. In 2020 VFS Aeromechanics for Advanced Vertical Flight Technical Meeting; The Vertical Flight Society: San Jose, CA, USA, 2020. [Google Scholar]
- Brès, G.A. Modeling the noise of arbitrary maneuvering rotorcraft: Analysis and implementation of the PSU-WOPWOP noise prediction code. Master’s Thesis, Pennsylvania State University, University Park, PA, USA, 2002. [Google Scholar]
- Brès, G.A.; Brentner, K.S.; Perez, G.; Jones, H.E. Maneuvering rotorcraft noise prediction. J. Sound Vib. 2004, 275, 719–738. [Google Scholar] [CrossRef]
- Dunn, M.H.; Tarkenton, G.M. Computational Methods in the Prediction of Advanced Subsonic and Supersonic Propeller Induced Noise: ASSPIN Users’ Manual (No. NASA-CR-4434); NASA. Langley Research Center: Hampton, VA, USA, 1992. [Google Scholar]
- Lopes, L.V.; Burley, C.L. ANOPP2 User’s Manual: Version 1.2 (No. L-20692). 2016. Available online: http://ntrs.nasa.gov/citations/20160014858 (accessed on 22 December 2016).
- Paterson, R.W.; Amiet, R.K. Noise of a Model Helicopter Rotor Due to Ingestion of Turbulence (No. NASA-CR-3213). 1979. Available online: http://ntrs.nasa.gov/citations/19800002821 (accessed on 4 September 2013).
- von Karman, T.H.; Sears, W.R. Airfoil theory for non-uniform motion. J. Aeronaut. Sci. 1938, 5, 379–390. [Google Scholar] [CrossRef]
- Amiet, R.K. Noise Due to Rotor-Turbulence Interaction; NASA. Langley Research Center Helicopter Acoustics: Hampton, VA, USA, 1978. [Google Scholar]
- Majumdar, S.J.; Peake, N. Noise generation by the interaction between ingested turbulence and a rotating fan. J. Fluid Mech. 1998, 359, 181–216. [Google Scholar] [CrossRef]
- Smith, S.N. Discrete Frequency Sound Generation in Axial FLOW turbomachines. Aeronautical Research Council Reports & Memoranda 3709. Ministry of Defence. 1972. Available online: http://reports.aerade.cranfield.ac.uk/handle/1826.2/2985 (accessed on 21 October 2014).
- Glegg, S.; Morton, M.; Devenport, W. Rotor inflow noise caused by a boundary layer: Theory and examples. In Proceedings of the 18th AIAA/CEAS Aeroacoustics Conference, Colorado Springs, CO, USA, 4–6 June 2012. [Google Scholar] [CrossRef]
- Kerschen, E.; Gliebe, P. Fan noise caused by the ingestion of anisotropic turbulence-a model based on axisymmetric turbulence theory. In Proceedings of the 6th AIAA Aeroacoustics Conference, Hartford, CT, USA, 4–6 June 1980. [Google Scholar] [CrossRef]
- Glegg, S.A.; Devenport, W.; Alexander, N. Broadband rotor noise predictions using a time domain approach. J. Sound Vib. 2015, 335, 115–124. [Google Scholar] [CrossRef]
- Casalino, D.; Grande, E.; Romani, G.; Ragni, D.; Avallone, F. Definition of a benchmark for low Reynolds number propeller aeroacoustics. Aerosp. Sci. Technol. 2021, 113, 106707. [Google Scholar] [CrossRef]
- Roger, M.; Moreau, S. Back-scattering correction and further extensions of Amiet’s trailing-edge noise model. Part 1: Theory. J. Sound Vib. 2005, 286, 477–506. [Google Scholar] [CrossRef]
- Yunus, F.; Grande, E.; Casalino, D.; Avallone, F.; Ragni, D. Efficient low-fidelity aeroacoustic permanence calculation of propellers. Aerosp. Sci. Technol. 2022, 123, 107438. [Google Scholar] [CrossRef]
- Li, S.; Lee, S. Predictions and validations of small-scale rotor noise using ucd-quietfly. In Proceedings of the 2022 VFS Aeromechanics for Advanced Vertical Flight Technical Meeting, San Jose, CA, USA, 25 January 2022. [Google Scholar]
- Gill, H.; Lee, S.; Ruh, M.L.; Hwang, J.T. Applicability of low-fidelity tonal and broadband noise models on small-scaled rotors. In Proceedings of the AIAA SciTech 2023 Forum, National Harbor, MD, USA, 23–27 January 2023. [Google Scholar] [CrossRef]
- Karve, R.; Angland, D.; Nodé-Langlois, T. An analytical model for predicting rotor broadband noise due to turbulent boundary layer ingestion. J. Sound Vib. 2018, 436, 62–80. [Google Scholar] [CrossRef]
- Kerschen, E.J.; Gliebe, P.R. Noise caused by the interaction of a rotor with anisotropic turbulence. AIAA J. 1981, 19, 717–723. [Google Scholar] [CrossRef]
- Raposo, H.; Azarpeyvand, M. Turbulence ingestion noise generation in rotating blades. J. Fluid Mech. 2024, 980, A53. [Google Scholar] [CrossRef]
- Du Val, R.W.; He, C. Validation of the FLIGHTLAB virtual engineering toolset. Aeronaut. J. 2018, 122, 519–555. [Google Scholar] [CrossRef]
- Peters, D.A.; He, C.J. Correlation of measured induced velocities with a finite-state wake model. J. Am. Helicopter Soc. 1991, 36, 59–70. [Google Scholar] [CrossRef]
- Lee, H.; Lee, D.J. Rotor interactional effects on aerodynamic and noise characteristics of a small multirotor unmanned aerial vehicle. Phys. Fluids 2020, 32, 047107. [Google Scholar] [CrossRef]
- Ahuja, V.; Little, D.S.; Majdalani, J.; Hartfield, R.J. On the prediction of noise generated by urban air mobility (UAM) vehicles. II. Implementation of the Farassat F1A formulation into a modern surface-vorticity panel solver. Phys. Fluids 2022, 34, 116118. [Google Scholar] [CrossRef]
- Zawodny, N.S.; Boyd Jr, D.D.; Burley, C.L. Acoustic characterization and prediction of representative, small-scale rotary-wing unmanned aircraft system components. In Proceedings of the American Helicopter Society (AHS) Annual Forum (No. NF1676L-22587), West Palm Beach, FL, USA, 17–19 May 2016. [Google Scholar]
- Mankbadi, R.R.; Afari, S.; Golubev, V.V. Simulations of broadband noise of a small uav propeller. In Proceedings of the AIAA SciTech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Towne, A.; Schmidt, O.T.; Colonius, T. Spectral proper orthogonal decomposition and its relationship to dynamic mode decomposition and resolvent analysis. J. Fluid Mech. 2018, 847, 821–867. [Google Scholar] [CrossRef]
- Afari, S.; Mankbadi, R.R. Simulations of noise generated by Rotor-Rotor interactions at static conditions. In Proceedings of the AIAA SciTech 2021 Forum, Virtual event, 11–15 and 19–21 January 2021. [Google Scholar] [CrossRef]
- Kunz, F.; Zhou, B.Y.; Pullin, S.F.; Azarpeyvand, M.; Galimberti, L.; Morelli, M.; Guardone, A. High-Fidelity Propeller Broadband Noise Prediction using SU2. In Proceedings of the AIAA AVIATION 2023 Forum, San Diego, CA, USA, 12–16 June 2023. [Google Scholar] [CrossRef]
- Thurman, C.S.; Zawodny, N.S.; Baeder, J.D. Computational prediction of broadband noise from a representative small unmanned aerial system rotor. In Proceedings of the Vertical Flight Society’s 76th Annual Forum & Technology Display, Virginia Beach, VA, USA, 6–8 October 2020. [Google Scholar] [CrossRef]
- Brooks, T.F.; Burley, C.L. Blade wake interaction noise for a main rotor. J. Am. Helicopter Soc. 2004, 49, 11–27. [Google Scholar] [CrossRef]
- Thurman, C.; Zawodny, N.S.; Pettingill, N.A.; Lopes, L.V.; Baeder, J.D. Physics-informed broadband noise source identification and prediction of an ideally twisted rotor. In Proceedings of the AIAA SciTech 2021 Forum, Virtual event, 11–15 and 19–21 January 2021. [Google Scholar] [CrossRef]
- Thurman, C.S.; Zawodny, N.S.; Pettingill, N.A. The effect of boundary layer character on stochastic rotor blade vortex shedding noise. In Proceedings of the Vertical Flight Society’s 78th Annual Forum and Technology Display, Fort Worth, TX, USA, 10–12 May 2022. [Google Scholar] [CrossRef]
- Trascinelli, L.; Hanson, L.P.; Romani, G.; Casalino, D.; Zhou, B.Y.; Zang, B.; Azarpeyvand, M. Numerical Simulations of Cylinder-Induced Turbulence Ingestion in Forward Flight Propellers. In Proceedings of the 30th AIAA/CEAS Aeroacoustics Conference, Rome, Italy, 4–7 June 2024. [Google Scholar] [CrossRef]
- Li, S.; Lee, S. A machine learning-based fast prediction of rotorcraft broadband noise. In Proceedings of the AIAA AVIATION 2020 FORUM, Virtual event, 15–19 June 2020. [Google Scholar] [CrossRef]
- Thurman, C.S.; Zawodny, N.S. Aeroacoustic characterization of optimum hovering rotors using artificial neural networks. In Proceedings of the Vertical Flight Society’s 77th Annual Forum & Technology Display, Virtaul, 10–14 May 2021. [Google Scholar] [CrossRef]
- Zhou, B.Y.; Hanson, L.P.; Pullin, S.F.; Zang, B.; Hauth, J.; Huan, X. Multi-Fidelity Propeller Noise Prediction using a Data-Driven Approach. In Proceedings of the AIAA AVIATION 2023 Forum, Online, San Diego, CA, USA, 12–16 June 2023. [Google Scholar] [CrossRef]
- Wei, Y.; Xu, F.; Bian, S.; Kong, D. Noise reduction of UAV using biomimetic propellers with varied morphologies leading-edge serration. J. Bionic Eng. 2020, 17, 767–779. [Google Scholar] [CrossRef]
- Butt, F.R.; Talha, T. Numerical investigation of the effect of leading-edge tubercles on propeller performance. J. Aircr. 2019, 56, 1014–1028. [Google Scholar] [CrossRef]
- Lee, H.M.; Lu, Z.; Lim, K.M.; Xie, J.; Lee, H.P. Quieter propeller with serrated trailing edge. Appl. Acoust. 2019, 146, 227–236. [Google Scholar] [CrossRef]
- Cambray, A.; Pang, E.; Ali, S.A.S.; Rezgui, D.; Azarpeyvand, M. Investigation towards a better understanding of noise generation from UAV propellers. In Proceedings of the 2018 AIAA/CEAS Aeroacoustics Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Won, J.; Lee, S. Investigation of Airfoil Parameterizations and Optimization for Rotor Broadband Noise Reduction. In Proceedings of the Vertical Flight Society’s 80th Annual Forum & Technology Display, Montreal, QC, Canada, 7–9 May 2024. [Google Scholar] [CrossRef]
- Peixun, Y.U.; Jiahui, P.; Junqiang, B.; Xiao, H.A.N.; Xiang, S. Aeroacoustic and aerodynamic optimization of propeller blades. Chin. J. Aeronaut. 2020, 33, 826–839. [Google Scholar] [CrossRef]
- Leslie, A.; Wong, K.C.; Auld, D. Broadband noise reduction on a mini-UAV propeller. In Proceedings of the 14th AIAA/CEAS Aeroacoustics Conference, Vancouver, BC, Canada, 5–7 May 2008. [Google Scholar] [CrossRef]
- Demoret, A.C.; Wisniewski, C.F. The impact of a notched leading edge on performance and noise signature of unmanned aerial vehicle propellers. In Proceedings of the AIAA SciTech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- Sebastian, T.; Strem, C. Toroidal Propeller. U.S. Patent 10,836,466 B2, 17 November 2020. [Google Scholar]
- Afshari, R.; Karimian, S. A new blade tip geometry to improve aerodynamic performance and acoustic noise of helicopter blade in hovering flight. Aerosp. Sci. Technol. 2023, 135, 108197. [Google Scholar] [CrossRef]
- Wolf, A.; Lutz, T.; Würz, W.; Krämer, E.; Stalnov, O.; Seifert, A. Trailing edge noise reduction of wind turbine blades by active flow control. Wind. Energy 2015, 18, 909–923. [Google Scholar] [CrossRef]
- Yang, C.; Arcondoulis, E.J.; Yang, Y.; Guo, J.; Maryami, R.; Bi, C.; Liu, Y. Active control of airfoil turbulent boundary layer noise with trailing-edge blowing. J. Acoust. Soc. Am. 2023, 153, 2115. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Yan, X.; Li, Y. Vortex–airfoil interaction noise control using virtual serrations and surface morphing generated by leading-edge blowing. Phys. Fluids 2024, 36, 045136. [Google Scholar] [CrossRef]
- Sutliff, D.L. Broadband noise reduction of a low-speed fan noise using trailing edge blowing. In Proceedings of the 11th AIAA Aeroacoustics Conference, Monterey, CA, USA, 23–25 May 2005. [Google Scholar]
- Bernardini, G.; Poggi, C.; Gennaretti, M. A Minimum Objective Function Trim Procedure for VTOL Boundary Layer Trailing Edge Broadband Noise Reduction. In Proceedings of the 30th AIAA/CEAS Aeroacoustics Conference, Rome, Italy, 4–7 June 2024. [Google Scholar] [CrossRef]
- Polonsky, D.; Stalnov, O.; Greenblatt, D. Noise reduction on a model helicopter rotor using dielectric barrier discharge plasma actuators. AIAA J. 2023, 61, 3134–3141. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | k | C |
|---|---|---|
| DH | 2 | 36.7 |
| SKM | 2 | 42.9 |
| SG | 1.66 | 39.9 |
| OASPL (dB)—3600 RPM | OASPL (dB)—4200 RPM | OASPL (dB)—4800 RPM | |
| Experimental data—APC-SF | 54.35 | 54.83 | 60.81 |
| DH model | 61.08 | 65.38 | 69.31 |
| SKM model | 54.88 | 59.15 | 63.11 |
| SG model | 61.18 | 65.41 | 69.29 |
| OASPL (dB)—4800 RPM | OASPL (dB)—5400 RPM | OASPL (dB)—6000 RPM | |
| Experimental data—DJI-CF | 62.86 | 63.53 | 62.89 |
| DH model | 61.28 | 63.93 | 67.29 |
| SKM model | 55.08 | 57.73 | 61.09 |
| SG model | 61.36 | 64.09 | 67.34 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hua, J.; Mankbadi, R.R. Prediction and Control of Broadband Noise Associated with Advanced Air Mobility—A Review. Appl. Sci. 2024, 14, 8455. https://doi.org/10.3390/app14188455
Hua J, Mankbadi RR. Prediction and Control of Broadband Noise Associated with Advanced Air Mobility—A Review. Applied Sciences. 2024; 14(18):8455. https://doi.org/10.3390/app14188455
Chicago/Turabian StyleHua, Jie, and Reda R. Mankbadi. 2024. "Prediction and Control of Broadband Noise Associated with Advanced Air Mobility—A Review" Applied Sciences 14, no. 18: 8455. https://doi.org/10.3390/app14188455