
Analytical Study on the Impact of Nonlinear Foundation Stiffness on Pavement Dynamic Response under Vehicle Action

Abstract
:1. Introduction
2. The Vehicle–Pavement–Foundation System: Modeling and Solution
2.1. Vehicle Model and Tire Force
2.2. Represent the Pavement with the E-B Beam Model
2.3. Represent the Pavement with the Timoshenko Beam Model
3. Numerical Validation and Parametric Analysis
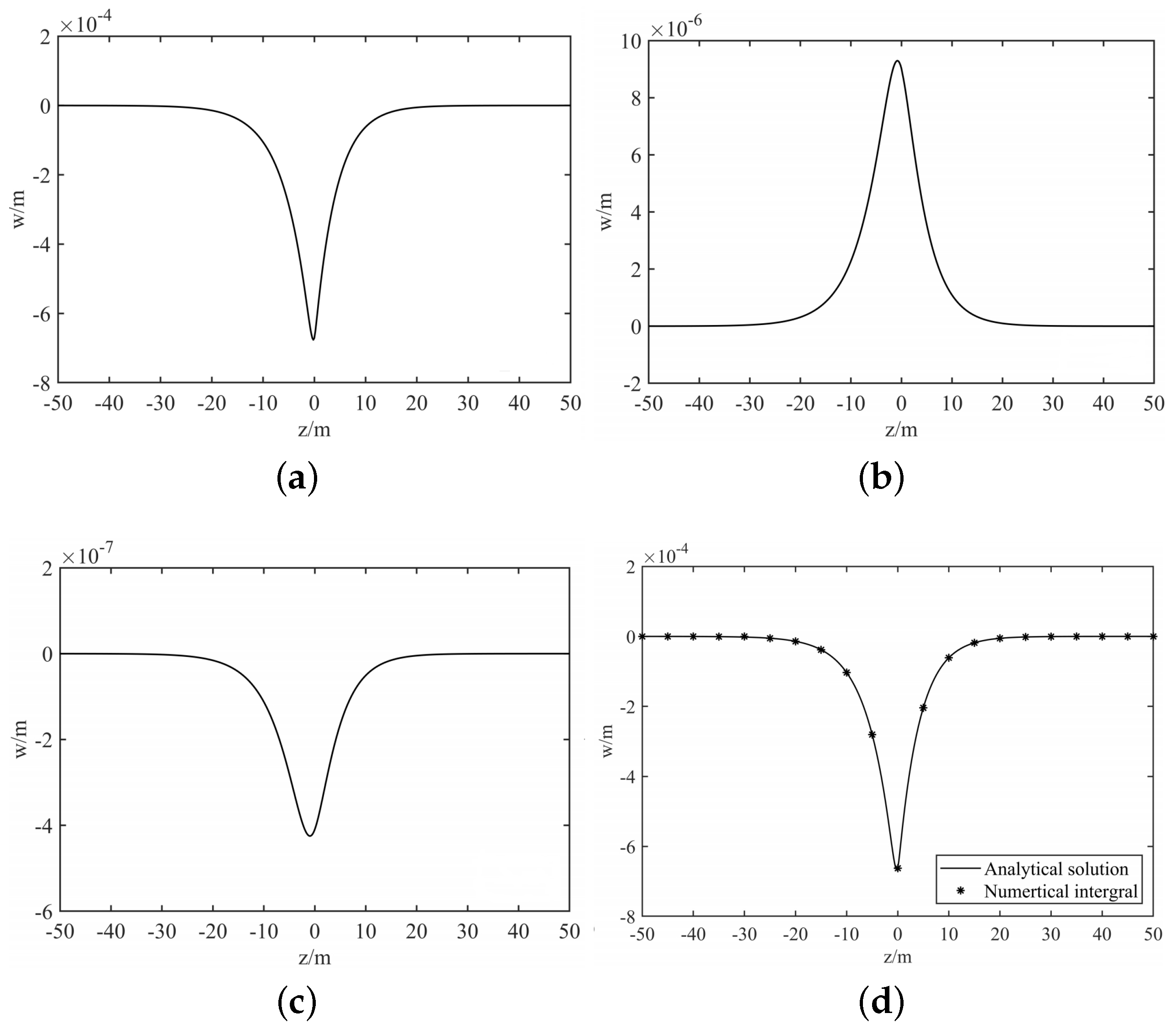
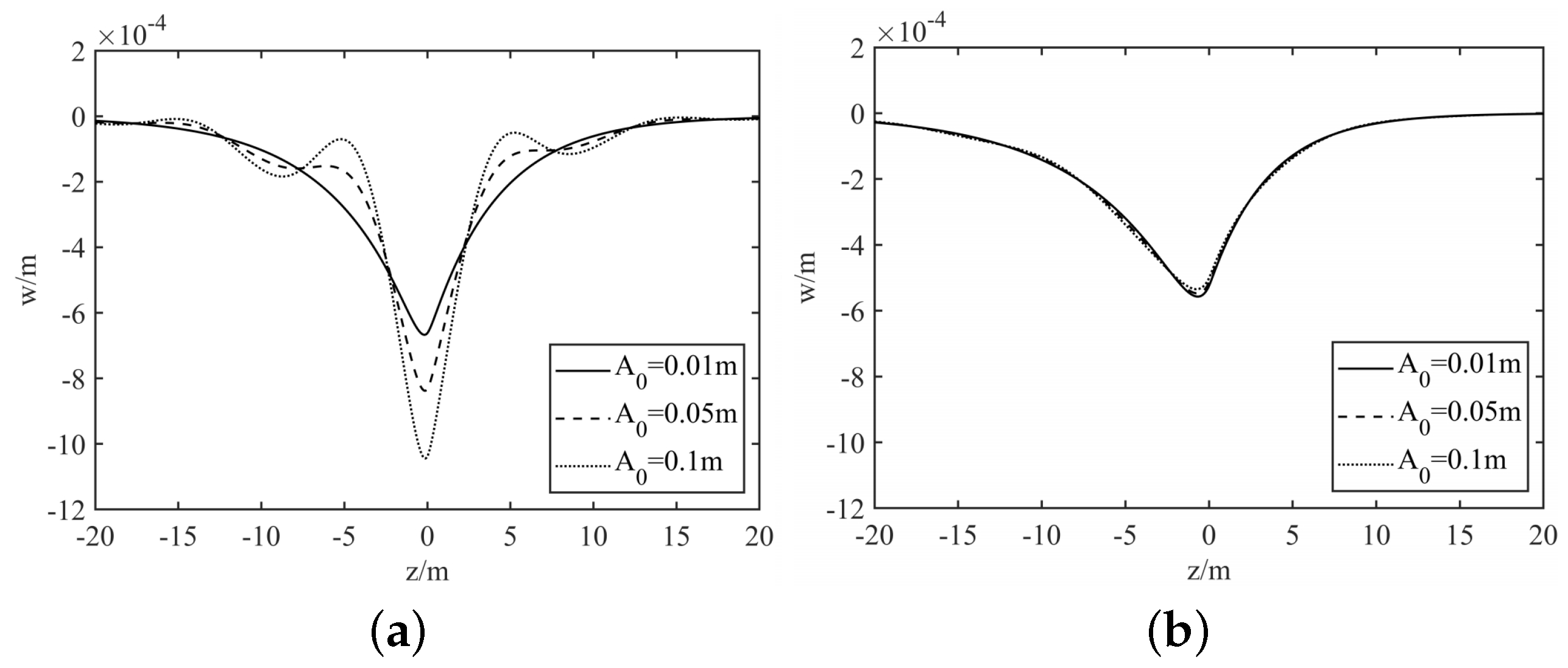
3.1. The E-B Model
3.2. The Timoshenko Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Item | Notation | Value |
|---|---|---|---|
| Beam | Young’s modulus | E | Pa |
| Shear modulus | G | Pa | |
| Mass density | 2373 kg/m3 | ||
| Cross sectional area | A | 0.3 m2 | |
| Sectional moment of inertia | I | m4 | |
| Shear coefficients | 0.4 | ||
| Roughness | Wavelength | 10 m | |
| Amplitude | 0.01 m | ||
| Foundation | Linear stiffness | N/m2 | |
| Nonlinear stiffness | N/m4 | ||
| Viscous damping | c | N·s/m2 | |
| Shear parameter | N | ||
| Rocking stiffness | N/m2 | ||
| Rocking damping | N·s/m2 |
4. Discussion
5. Conclusions
- When the excitation of the pavement takes the form of a sine wave, the force exerted by the tire upon contact is a harmonic load.
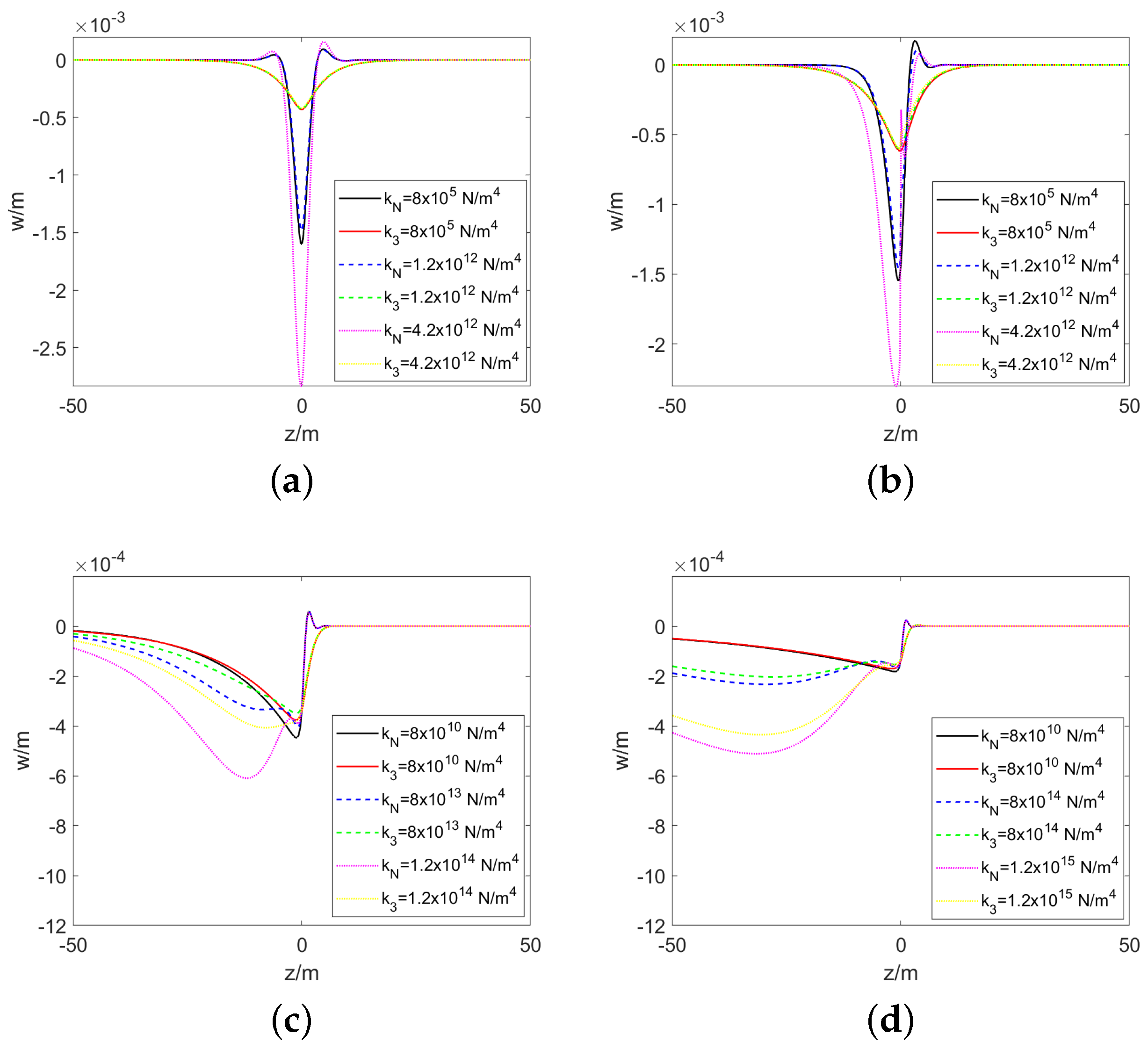
- Regardless of whether it is the E-B beam model or the Timoshenko beam model, the presence of cubic nonlinear stiffness will lead to an increase in the higher harmonic terms in the pavement response.
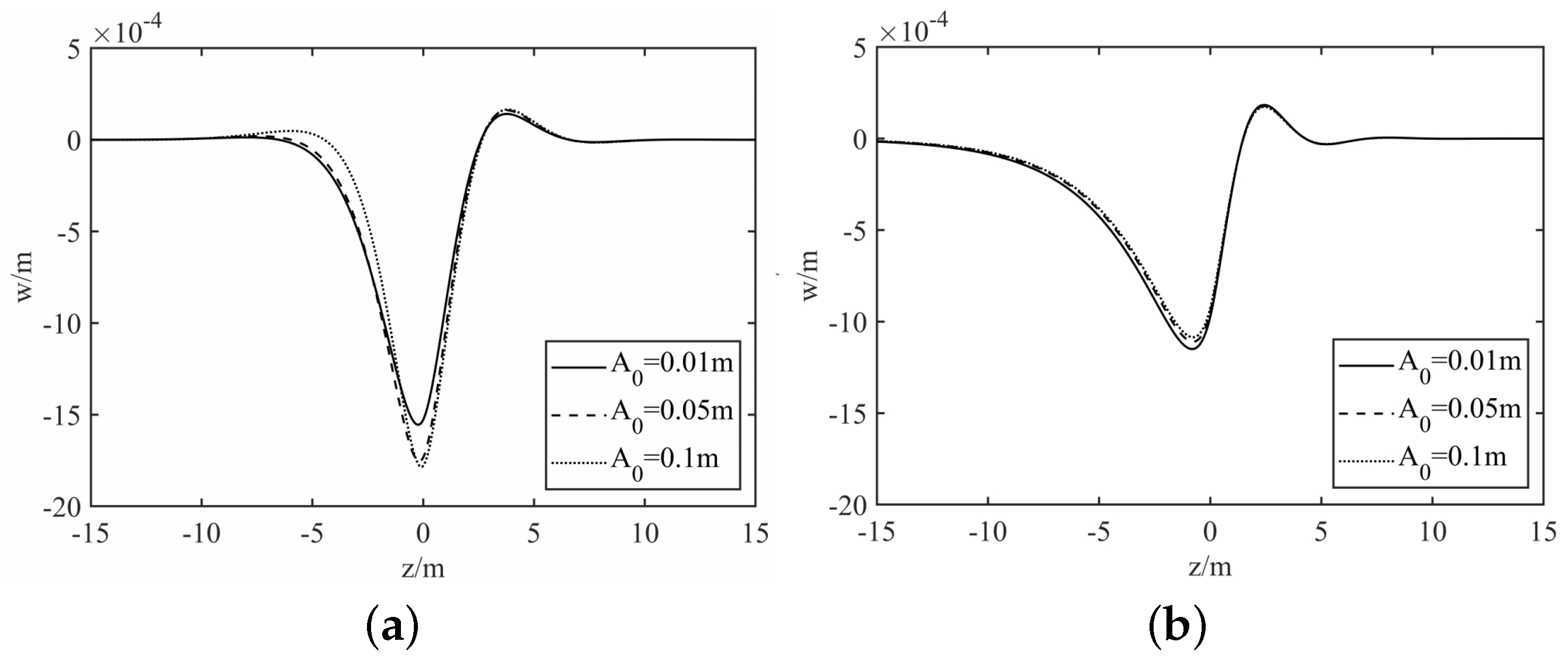
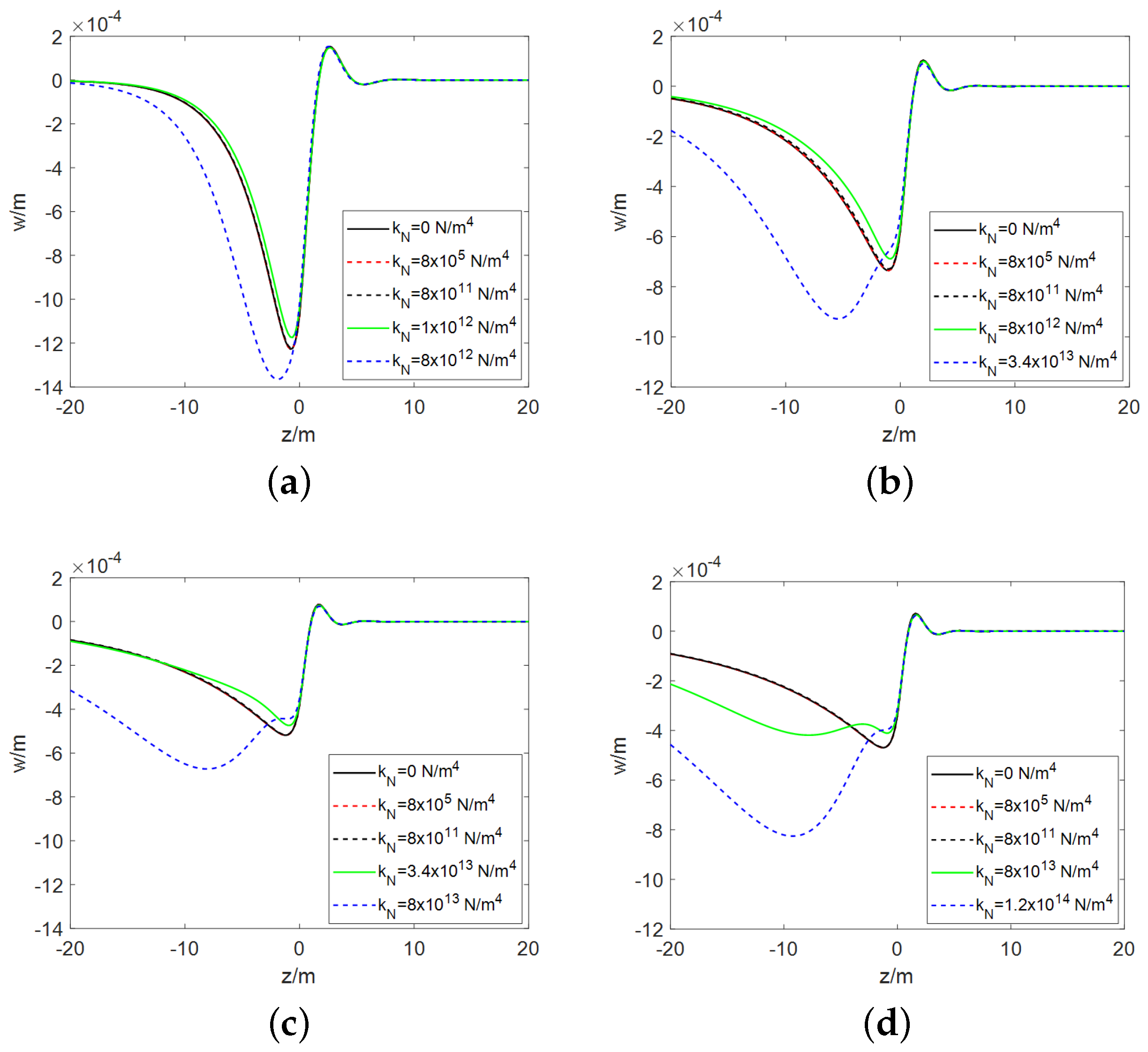
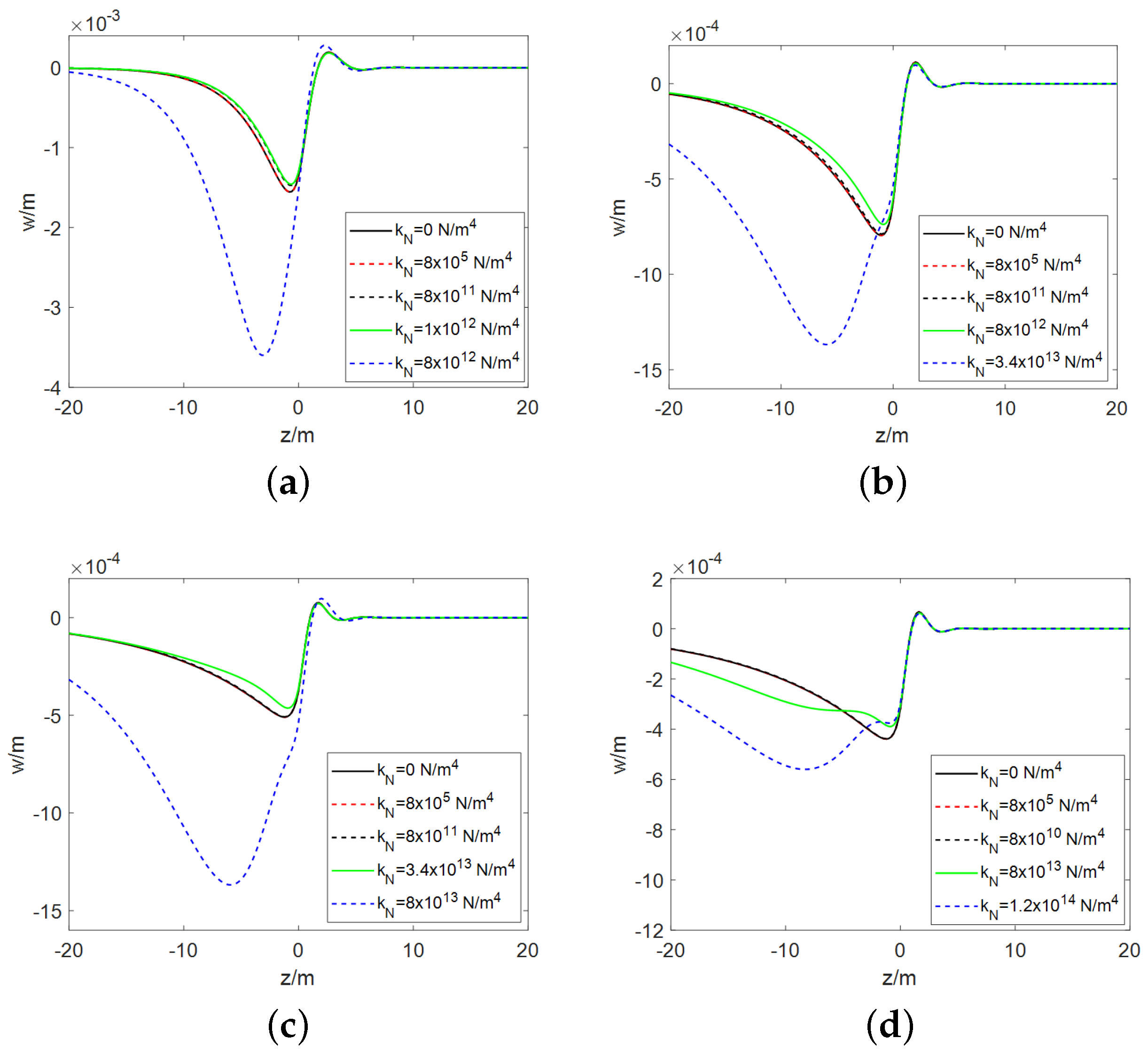
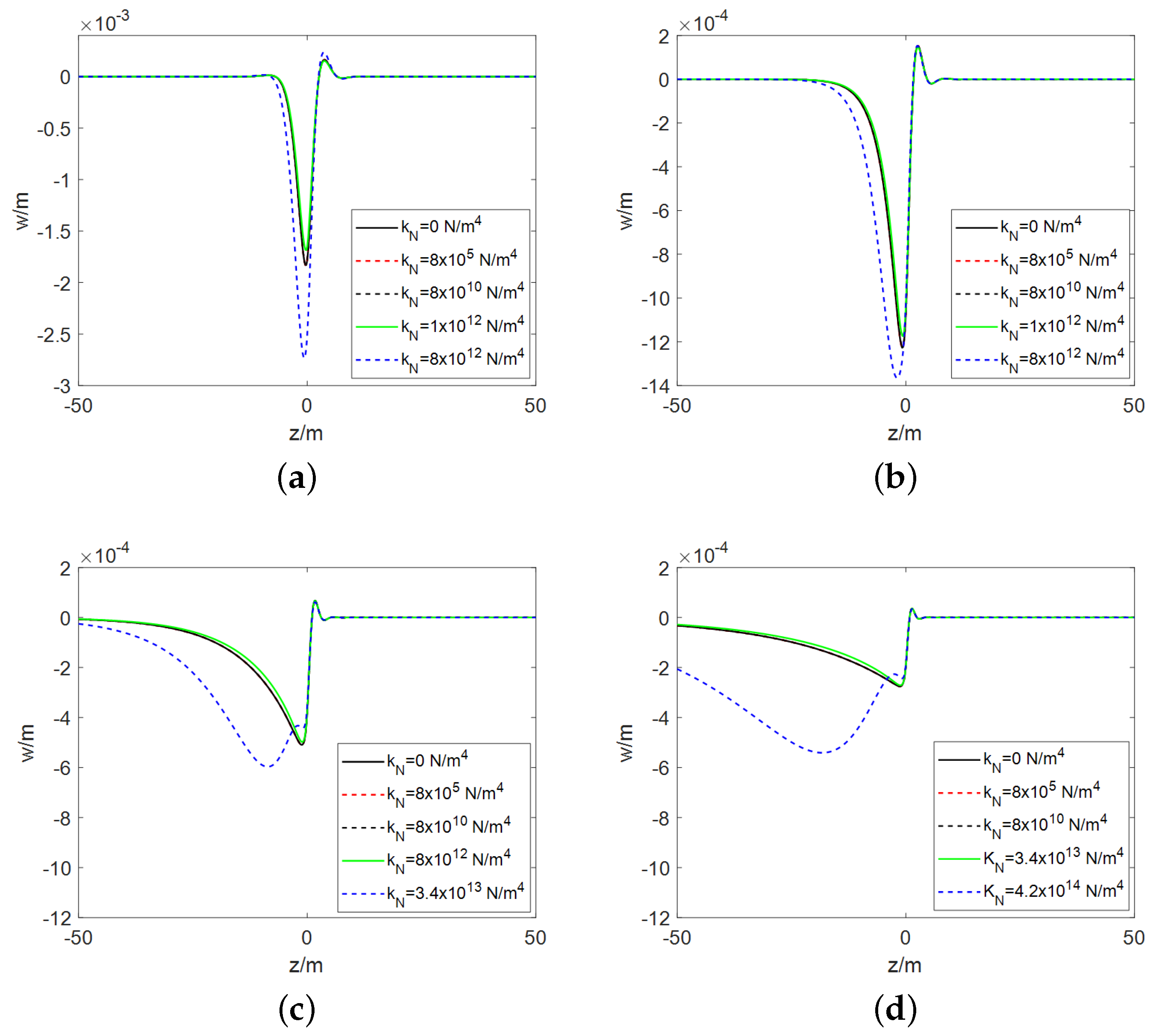
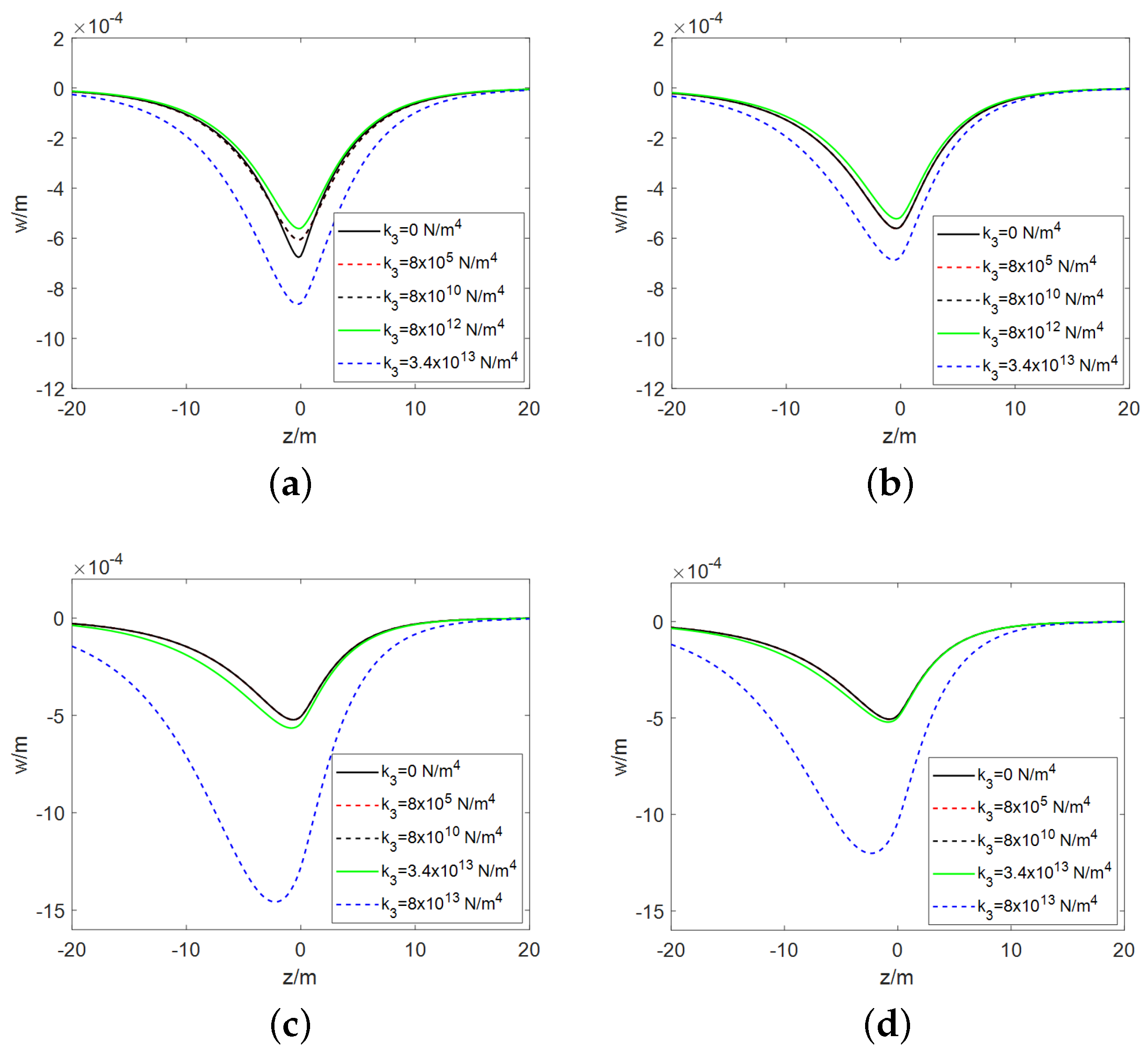
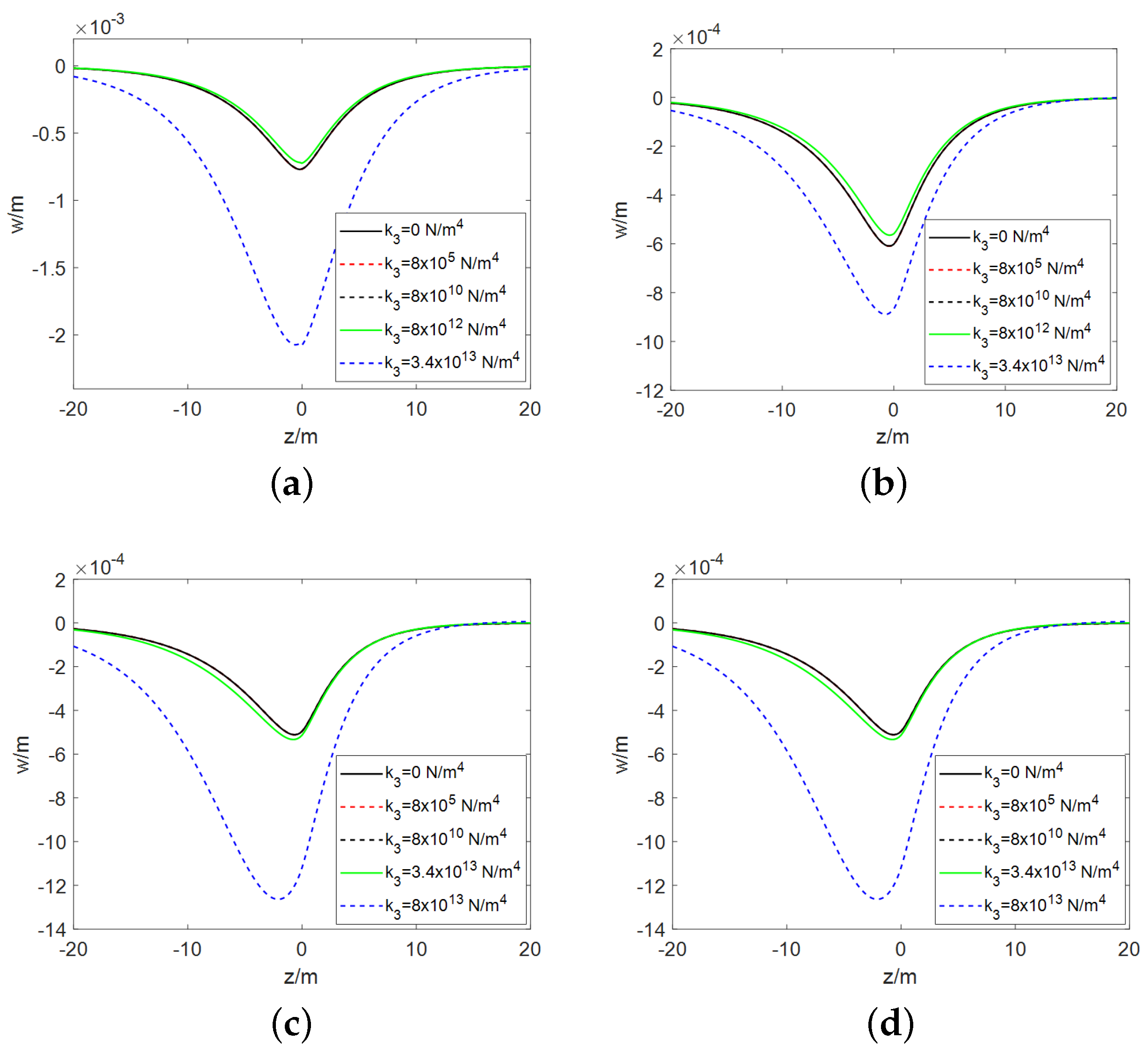
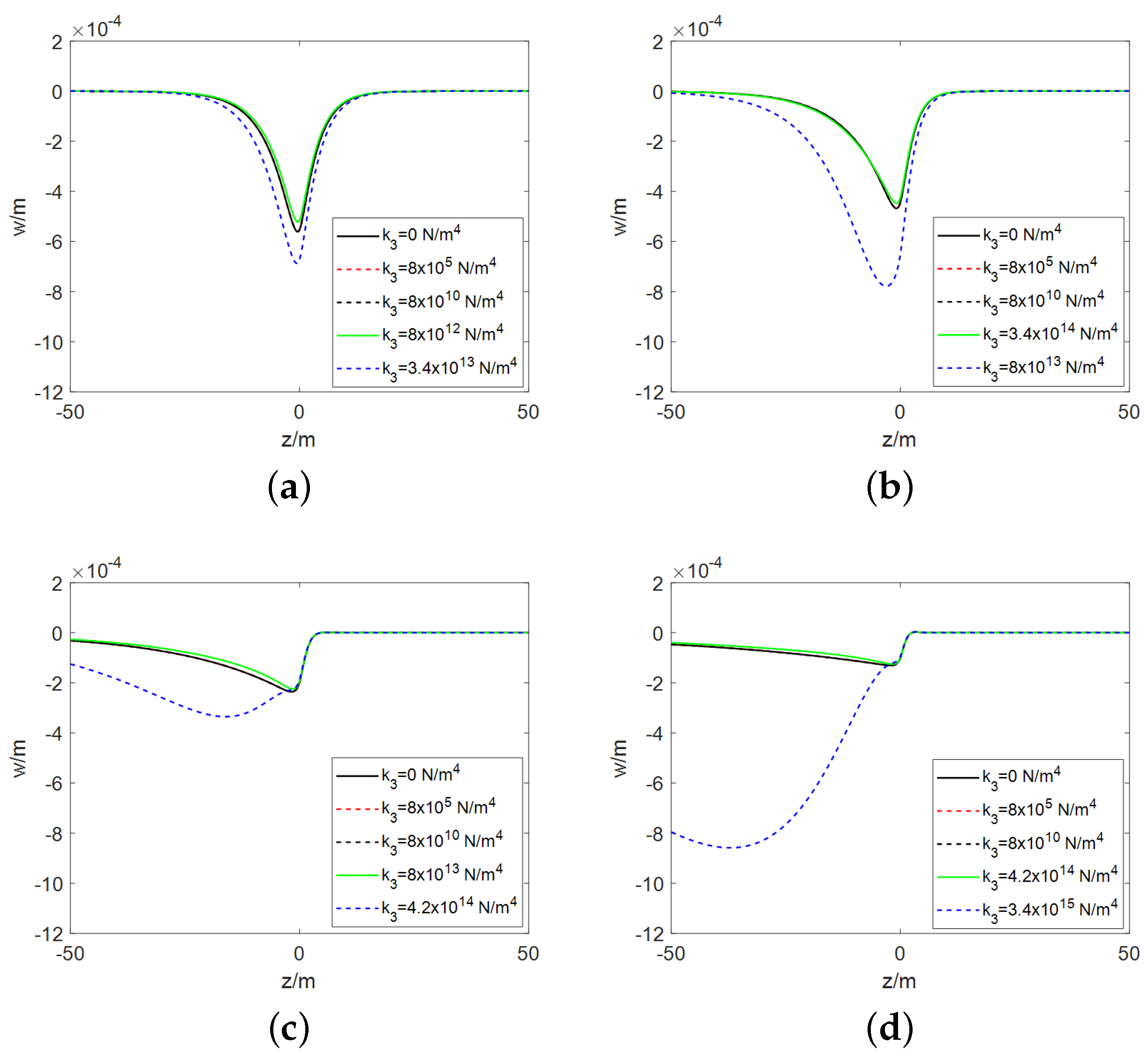
- Both the E-B beam model and the Timoshenko beam model have a threshold for the nonlinear stiffness of the foundation. When the nonlinear stiffness is below this threshold, its impact on the pavement deformation is negligible or minimal. However, when the nonlinear stiffness exceeds the threshold, the pavement deformation initially experiences a minor reduction, which is then followed by a substantial increase as the nonlinear stiffness rises. The magnitude of this threshold is not fixed and is primarily influenced by the vehicle velocity and the foundation damping coefficient, increasing with higher vehicle velocities and greater foundation damping. Under the same parameters, the threshold for the Timoshenko beam is significantly higher than that for the E-B beam.
- For both beam models, when the nonlinear stiffness is relatively low, the position of the wheel is almost coincident with the location of maximum pavement deformation. As the nonlinear stiffness increases, a noticeable offset occurs between the two positions, with the wheel positioned ahead of the area where the pavement deforms the most. The greater the nonlinear stiffness, the larger the offset between them. Comparatively, the offset effect is more pronounced in the E-B beam model.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Niki, D.B.; Edmond, V.M. Review on dynamic response of road pavements to moving vehicle loads; part 1: Rigid pavements. Soil Dyn. Earthq. Eng. 2023, 175, 108249. [Google Scholar]
- Niki, D.B.; Edmond, V.M. Review on dynamic response of road pavements to moving vehicle loads; part 2: Flexible pavements. Soil Dyn. Earthq. Eng. 2023, 175, 108248. [Google Scholar]
- Wang, Y.; Li, S.W.; Wei, N. Dynamic response impact of vehicle braking on simply supported beam bridges with corrugated steel wE-Bs based on vehicle-bridge coupled vibration analysis. Comput. Model. Eng. Sci. 2024, 139, 3467–3493. [Google Scholar]
- Ma, L.; Li, Z.; Xu, H.; Cai, C.S. Numerical study on the dynamic amplification factors of highway continuous beam bridges under the action of vehicle fleets. Eng. Struct. 2024, 304, 117638. [Google Scholar] [CrossRef]
- Zhai, W.; Cai, Z. Dynamic interaction between a lumped mass vehicle and a discretely supported continuous rail track. Comput. Struct. 1997, 63, 987–997. [Google Scholar] [CrossRef]
- Yuan, Z.H.; Xu, D.T.; Shi, L.; Pan, X.D.; He, B.; Hu, M.Y.; Cai, Y.Q. Hybrid analytical numerical modelling of ground vibrations from moving loads in a tunnel embedded in the saturated soil. Eur. J. Environ. Civil Eng. 2021, 26, 6047–6075. [Google Scholar] [CrossRef]
- AASHTO. Mechanistic-Empirical Pavement Design Guide: A Manual of Practice; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2020. [Google Scholar]
- Ding, H.; Shi, K.L.; Chen, L.Q.; Yang, S.P. Dynamic response of an infinite Timoshenko beam on a nonlinear viscoelastic foundation to a moving load. Nonlinear Dyn. 2013, 73, 285–298. [Google Scholar] [CrossRef]
- Chi, Z.Z.; He, Y.P.; Naterer, G.F. Design optimization of vehicle suspensions with a quarter-vehicle model. Trans. Can. Soc. Mech. Eng. 2008, 32, 297–312. [Google Scholar] [CrossRef]
- Zhang, R.; Wang, X. Parameter study and optimization of a half-vehicle suspension system model integrated with an arm-teeth regenerative shock absorber using taguchi method. Mech. Syst. Signal Process. 2019, 126, 65–81. [Google Scholar] [CrossRef]
- Yang, Y.; Ding, H.; Chen, L.Q. Dynamic response to a moving load of a timoshenko beam resting on a nonlinear viscoelastic foundation. Acta Mech. Sin. 2013, 29, 718–727. [Google Scholar] [CrossRef]
- Sun, L.; Cai, X.M.; Yang, J. Genetic algorithm-based optimum vehicle suspension design using minimum dynamic pavement load as a design criterion. J. Sound Vib. 2007, 301, 18–27. [Google Scholar] [CrossRef]
- Sarker, D.; Wang, J.X.; Khan, M.A. Development of the Virtual Load Method by Applying the Inverse Theory for the Analysis of Geosynthetic-Reinforced Pavement on Expansive Soils. In Proceedings of the Eighth International Conference on Case Histories in Geotechnical Engineering (GEO-CONGRESS 2019), Philadelphia, PA, USA, 24–27 March 2019. [Google Scholar]
- Khan, M.A.; Wang, J.X. Application of Euler–Bernoulli Beam on Winkler Foundation for Highway Pavement on Expansive Soils. In Proceedings of the 2nd Pan-American Conference on Unsaturated Soils (PanAm-UNSAT), Dallas, TX, USA, 12–15 November 2017. [Google Scholar]
- Zhang, M.; Jiang, X.; Liu, H.P.; Fu, Y.Q.; Abdelhaliem, B.L.E.; Qiu, Y.J. Development Optimization of Computer Programs for Asphalt Pavement Structure Based on Burmister’s Layered Theory from Application Perspective. Int. J. Pavement Res. Technol. 2024. [Google Scholar] [CrossRef]
- Mamlouk, M.S. General outlook of pavement and vehicle dynamics. J. Transp. Eng. 1997, 123, 515–517. [Google Scholar] [CrossRef]
- Fan, W.; Zhang, S.; Zhu, W.; Zhu, H. An efficient dynamic formulation for the vibration analysis of a multi-span power transmission line excited by a moving deicing robot. Appl. Math Model. 2022, 103, 619–635. [Google Scholar] [CrossRef]
- Li, S.H.; Yang, S.P.; Chen, L.Q.; Lu, Y.J. Effects of parameters on dynamic responses for a heavy vehicle–pavement–foundation coupled system. Int. J. Heavy Veh. Syst. 2012, 19, 207–224. [Google Scholar] [CrossRef]
- Li, S.H.; Yang, S.P.; Chen, L.Q. A nonlinear vehicle-road coupled model for dynamics research. J. Comput. Nonlinear Dyn. 2013, 8, 021001. [Google Scholar] [CrossRef]
- Ding, H.; Yang, Y.; Chen, L.Q.; Yang, S.P. Vibration of vehicle–pavement coupled system based on a timoshenko beam on a nonlinear foundation. J. Sound Vib. 2014, 333, 6623–6636. [Google Scholar] [CrossRef]
- Krishnanunni, C.G.; Rao, B.N. Decoupled technique for dynamic response of vehicle–pavement systems. Eng. Struct. 2019, 191, 264–279. [Google Scholar] [CrossRef]
- Pirmoradian, M.; Torkan, E.; Karimpour, H. Parametric resonance analysis of rectangular plates subjected to moving inertial loads via IHB method. Int. J. Mech. Sci. 2018, 142, 191–215. [Google Scholar] [CrossRef]
- Bucinskas, P.; Andersen, L.V. Dynamic response of vehicle-bridge-soil system using lumped-parameter models for structure-soil interaction. Comput. Struct. 2020, 238, 106270. [Google Scholar] [CrossRef]
- Ma, X.Y.; Quan, W.W.; Dong, Z.J.; Dong, Y.K.; Si, C.D. Dynamic response analysis of vehicle and asphalt pavement coupled system with the excitation of road surface unevenness. Appl. Math. Model. 2022, 104, 421–438. [Google Scholar] [CrossRef]
- Liou, J.Y.; Sung, J.C. Surface responses induced by point load or uniform traction moving steadily on an anisotropic half-plane. Int. J. Solid Struct. 2008, 45, 2737–2757. [Google Scholar] [CrossRef]
- Dutykh, D. Moving Load on a Floating Ice Layer. Master’s Thesis, Khalifa University of Science and Technology, Abu Dhabi, United Arab Emirates, 2005. [Google Scholar]
- Pegios, I.P.; Papargyri-Beskou, S.; Zhou, Y.; He, P. Steady-state dynamic response of a gradient elastic half-plane to a load moving on its surface with constant speed. Arch. Appl. Mech. 2019, 88, 1809–1824. [Google Scholar] [CrossRef]
- Rys, D.; Burnos, P. Study on the accuracy of axle load spectra used for pavement design. Int. J. Pavement Eng. 2021, 23, 3706–3715. [Google Scholar] [CrossRef]
- Zhu, X.Q.; Law, S.S. Structural health monitoring based on vehicle-bridge interaction: Accomplishments and challenges. Adv. Struct. Eng. 2015, 18, 1999–2015. [Google Scholar] [CrossRef]
- Martínez, C.J.; Mazzola, L.; Baeza, L.; Bruni, S. Numerical estimation of stresses in railway axles using a train–track interaction model. Int. J. Fatigue 2013, 47, 18–30. [Google Scholar] [CrossRef]
- Frýba, L. Vibration of Solids and Structures under Moving Loads; Springer Science & Business Media: Dordrecht, The Netherlands, 2013. [Google Scholar]
- Cifuentes, A.O. Dynamic response of a beam excited by a moving mass. Finite Elem. Anal. Des. 1989, 5, 237–246. [Google Scholar] [CrossRef]
- Sun, L. An explicit representation of steady state response of a beam on an elastic foundation to moving harmonic line loads. Int. J. Numer. Anal. Methods Geomech. 2003, 27, 69–84. [Google Scholar] [CrossRef]
- Zhang, Y. Steady state response of an infinite beam on a viscoelastic foundation with moving distributed mass and load. Sci. China Phys. Mech. Astron. 2020, 63, 284611. [Google Scholar] [CrossRef]
- Dimitrovová, Z. Complete semi-analytical solution for a uniformly moving mass on a beam on a two-parameter visco-elastic foundation with non-homogeneous initial conditions. Int. J. Mech. Sci. 2018, 144, 283–311. [Google Scholar] [CrossRef]
- Chen, H.Y.; Ding, H.; Li, S.H.; Chen, L.Q. Convergent term of the Galerkin truncation for dynamic response of sandwich beams on nonlinear foundations. J. Sound Vib. 2020, 483, 115514. [Google Scholar] [CrossRef]
- Zhen, B.; Xu, J.; Sun, J.Q. Analytical solutions for steady state responses of an infinite Euler–Bernoulli beam on a nonlinear viscoelastic foundation subjected to a harmonic moving load. J. Sound Vib. 2020, 476, 115271. [Google Scholar] [CrossRef]
- Adomian, G.; Rach, R. Equality of partial solutions in the decomposition method for linear or nonlinear partial differential equations. Comput. Math. Appl. 1990, 19, 9–12. [Google Scholar] [CrossRef]
- Snehasagar, G.; Krishnanunni, C.G.; Rao, B.N. Dynamics of vehicle–pavement system based on a viscoelastic Euler–Bernoulli beam model. Int. J. Pavement Eng. 2020, 21, 1669–1682. [Google Scholar] [CrossRef]
- Zhang, S.H.; Fan, W.; Yang, C.J. Semi-analytical solution to the steady-state periodic dynamic response of an infinite beam carrying a moving vehicle. Int. J. Mech. Sci. 2022, 226, 107409. [Google Scholar] [CrossRef]
- Wu, T.X.; Thompson, D.J. The effects of track non-linearity on wheel/rail impact. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2004, 218, 1–15. [Google Scholar] [CrossRef]
- Ding, H.; Chen, L.Q.; Yang, S.P. Convergence of Galerkin truncation for dynamic response of finite beams on nonlinear foundations under a moving load. J. Sound Vib. 2012, 331, 2426–2442. [Google Scholar] [CrossRef]
- Yang, S.P.; Li, S.H.; Lu, Y.J. Investigation on dynamical interaction between a heavy vehicle and road pavement. Veh. Syst. Dyn. 2010, 48, 923–944. [Google Scholar] [CrossRef]
- Wazwaz, A.M. Adomian decomposition method for a reliable treatment of Emden-Fowler equation. Appl. Math. Comput. 2003, 161, 543–560. [Google Scholar] [CrossRef]
- Ma, X.Y.; Quan, W.W.; Dong, Z.J.; Si, C.D.; Li, S.H. Research on dynamic response of vehicle and asphalt pavement interaction under random unevenness Excitation. J. Mech. Eng. 2021, 57, 40–50. (In Chinese) [Google Scholar]
- Ai, Z.Y.; Ren, G.P. Dynamic response of an infinite beam on a transversely isotropic multilayered half-space due to a moving load. Int. J. Mech. Sci. 2017, 133, 817–828. [Google Scholar] [CrossRef]
- Fǎrǎgǎu, A.B.; Mazilu, T.; Metrikine, A.V.; Lu, T.; Van Dalen, K.N. Transition radiation in an infinite one-dimensional structure interacting with a moving oscillator-the Green’s function method. J. Sound Vib. 2021, 492, 115804. [Google Scholar] [CrossRef]
- Liu, Z.H.; Niu, J.C.; Jia, R.H. Dynamic analysis of arbitrarily restrained stiffened plate under moving loads. Int. J. Mech. Sci. 2021, 200, 106414. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, X. Response of an infinite beam resting on the tensionless Winkler foundation subjected to an axial and a transverse concentrated loads. Eur. J. Mech. A Solids 2019, 77, 103819. [Google Scholar] [CrossRef]
- Phadke, H.; Jaiswal, O. Dynamic analysis of railway track on variable foundation under harmonic moving load. Proc. Inst. Mech. Eng. F J. Rail Rapid Transit 2022, 236, 302–316. [Google Scholar] [CrossRef]
- Zhang, J.N.; Yang, S.P.; Li, S.H.; Ding, H.; Lu, Y.J.; Si, C.D. Study on crack propagation path of asphalt pavement under vehicle-road coupled vibration. Appl. Math. Model. 2022, 101, 481–502. [Google Scholar] [CrossRef]
- Qiao, G.D.; Rahmatalla, S. Dynamics of Euler–Bernoulli beams with unknown viscoelastic boundary conditions under a moving load. J. Sound Vib. 2021, 491, 115771. [Google Scholar] [CrossRef]
- Dimitrovová, Z. Dynamic interaction and instability of two moving proximate masses on a beam on a Pasternak viscoelastic foundation. Appl. Math. Model. 2021, 100, 192–217. [Google Scholar] [CrossRef]





| Variable | Item | Notation | Value |
|---|---|---|---|
| Beam | Young’s modulus | E | Pa |
| Mass per unit Length | m | 711.9 kg/m | |
| Sectional moment of inertia | I | m4 | |
| Roughness | Wavelength | 10 m | |
| Amplitude | 0.01 m | ||
| Foundation | Linear stiffness | k | N/m2 |
| Nonlinear stiffness | N/m4 | ||
| Viscous damping | c | N·s/m2 | |
| Vehicle | Wheel mass | 550 kg | |
| Suspension mass | 4450 kg | ||
| Tire stiffness | N/m | ||
| Suspension stiffness | N/m | ||
| Tire damping | N·s/m2 | ||
| Suspension damping | N·s/m2 | ||
| velocity | v | 30 m/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouyang, L.; Xiang, Z.; Zhen, B.; Yuan, W. Analytical Study on the Impact of Nonlinear Foundation Stiffness on Pavement Dynamic Response under Vehicle Action. Appl. Sci. 2024, 14, 8705. https://doi.org/10.3390/app14198705
Ouyang L, Xiang Z, Zhen B, Yuan W. Analytical Study on the Impact of Nonlinear Foundation Stiffness on Pavement Dynamic Response under Vehicle Action. Applied Sciences. 2024; 14(19):8705. https://doi.org/10.3390/app14198705
Chicago/Turabian StyleOuyang, Lijun, Zhuoying Xiang, Bin Zhen, and Weixin Yuan. 2024. "Analytical Study on the Impact of Nonlinear Foundation Stiffness on Pavement Dynamic Response under Vehicle Action" Applied Sciences 14, no. 19: 8705. https://doi.org/10.3390/app14198705