
Study on Dynamic Response Characteristics and Monitoring Indicators of High-Speed Railway Subgrade in Karst Areas


Abstract
1. Introduction
2. Numerical Simulation
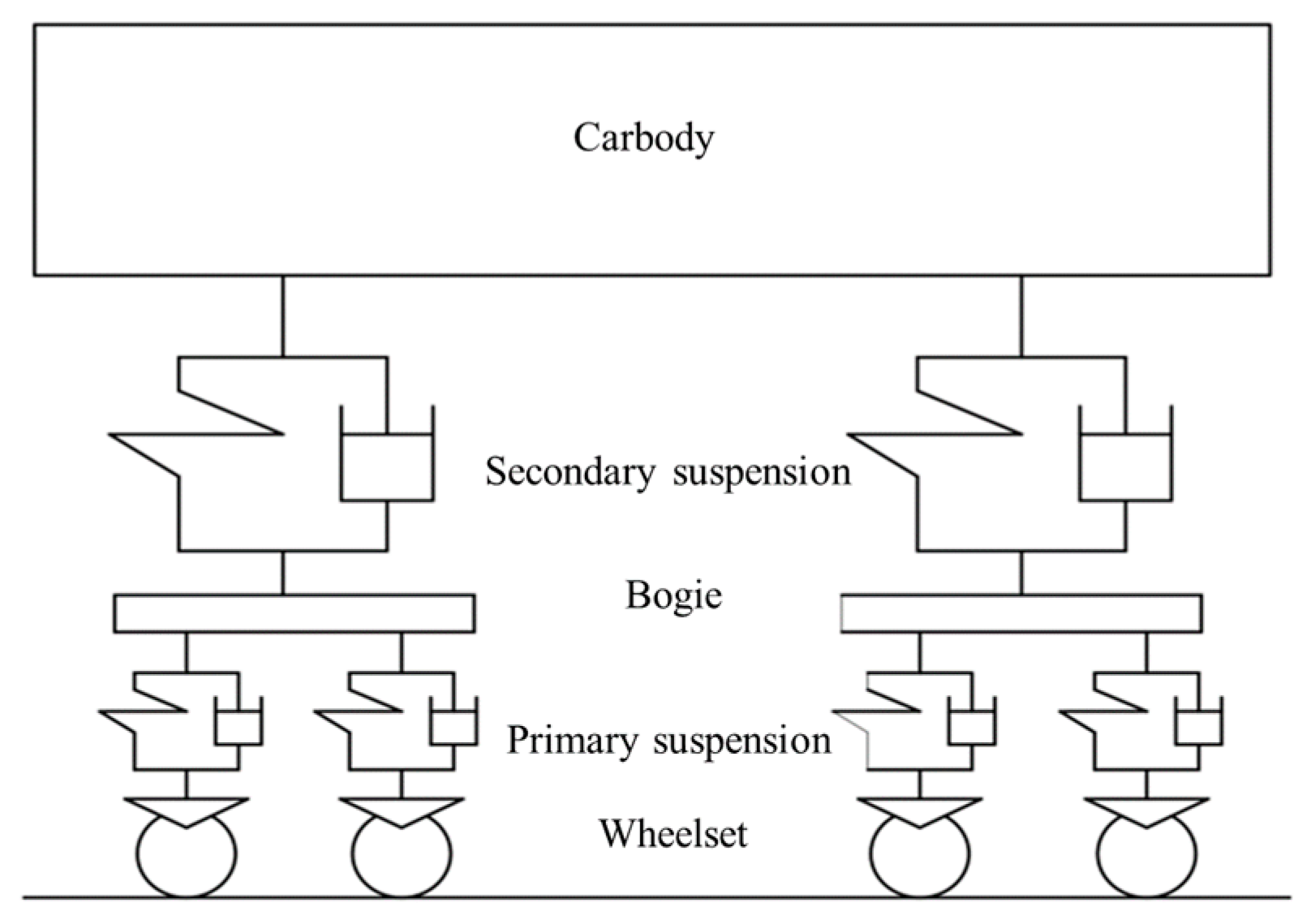
2.1. Vehicle-Track-Subgrade Coupled Model
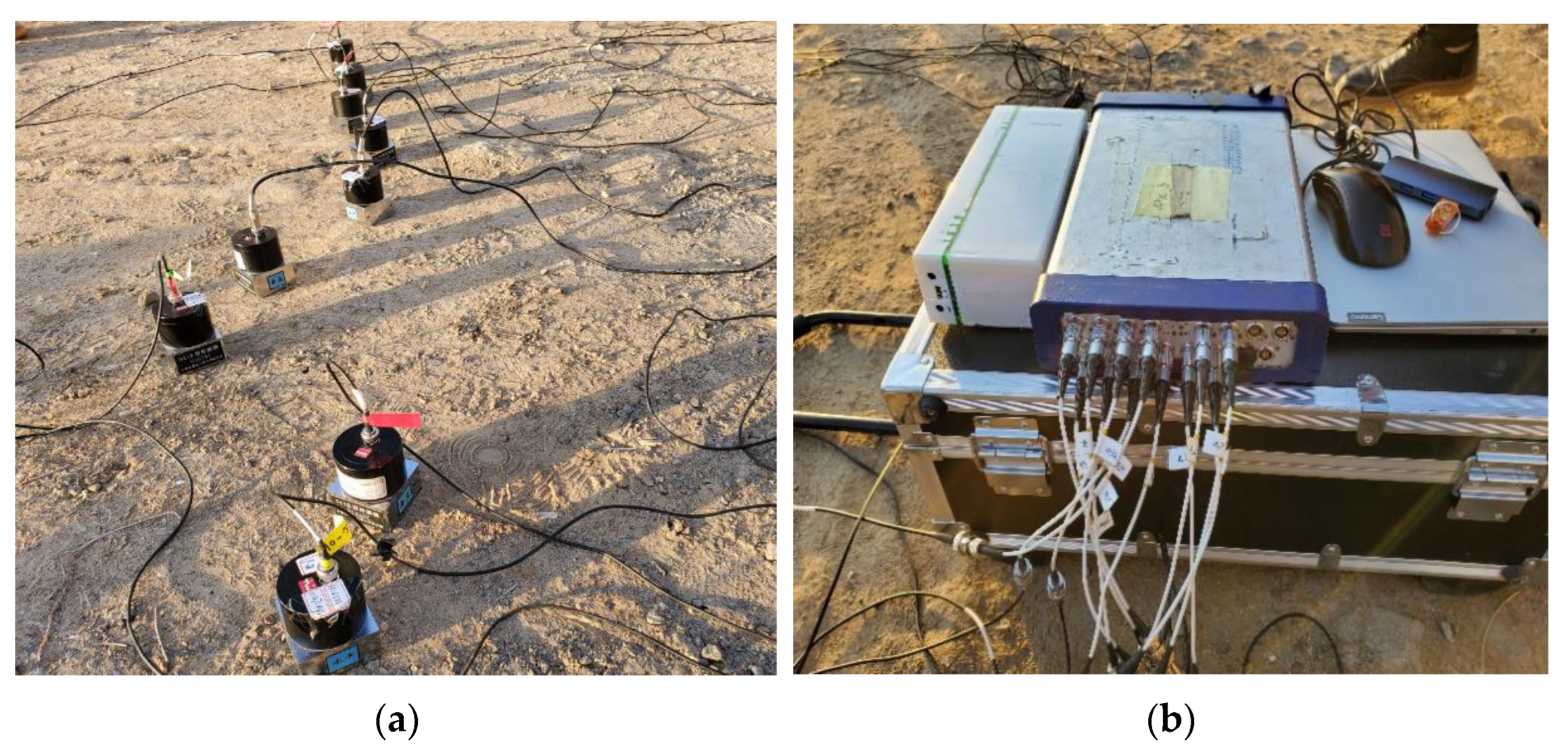
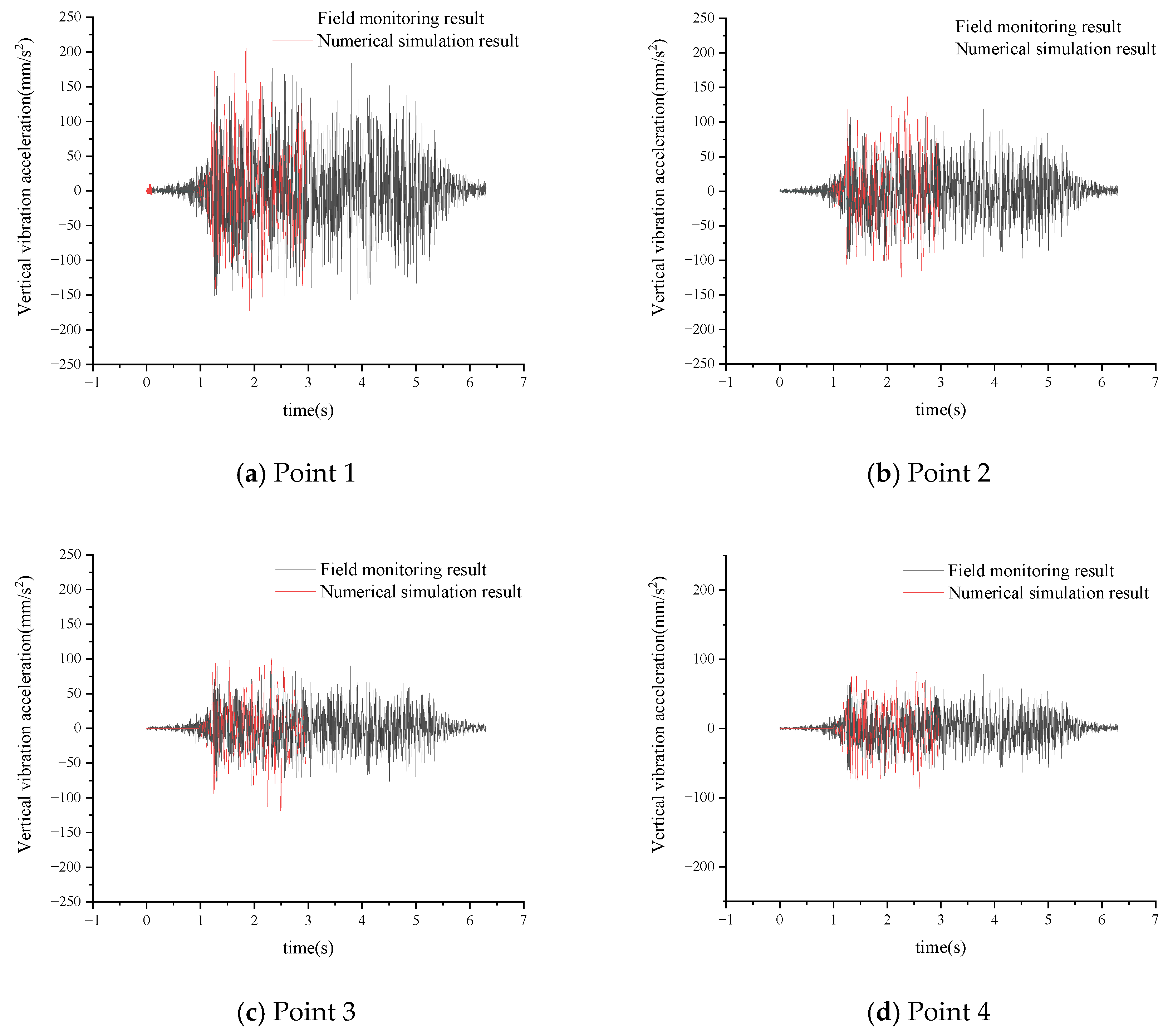
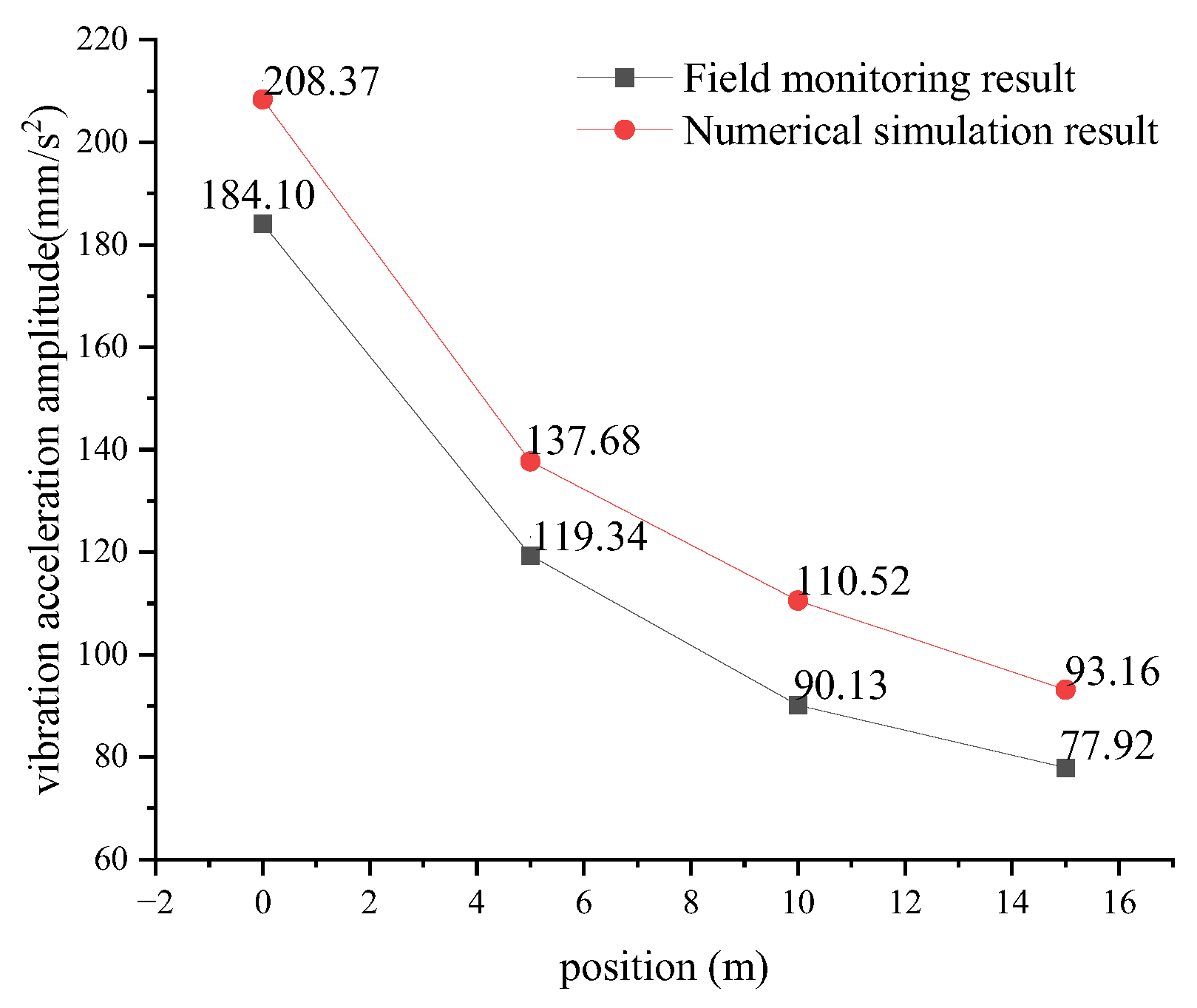
2.2. Validation
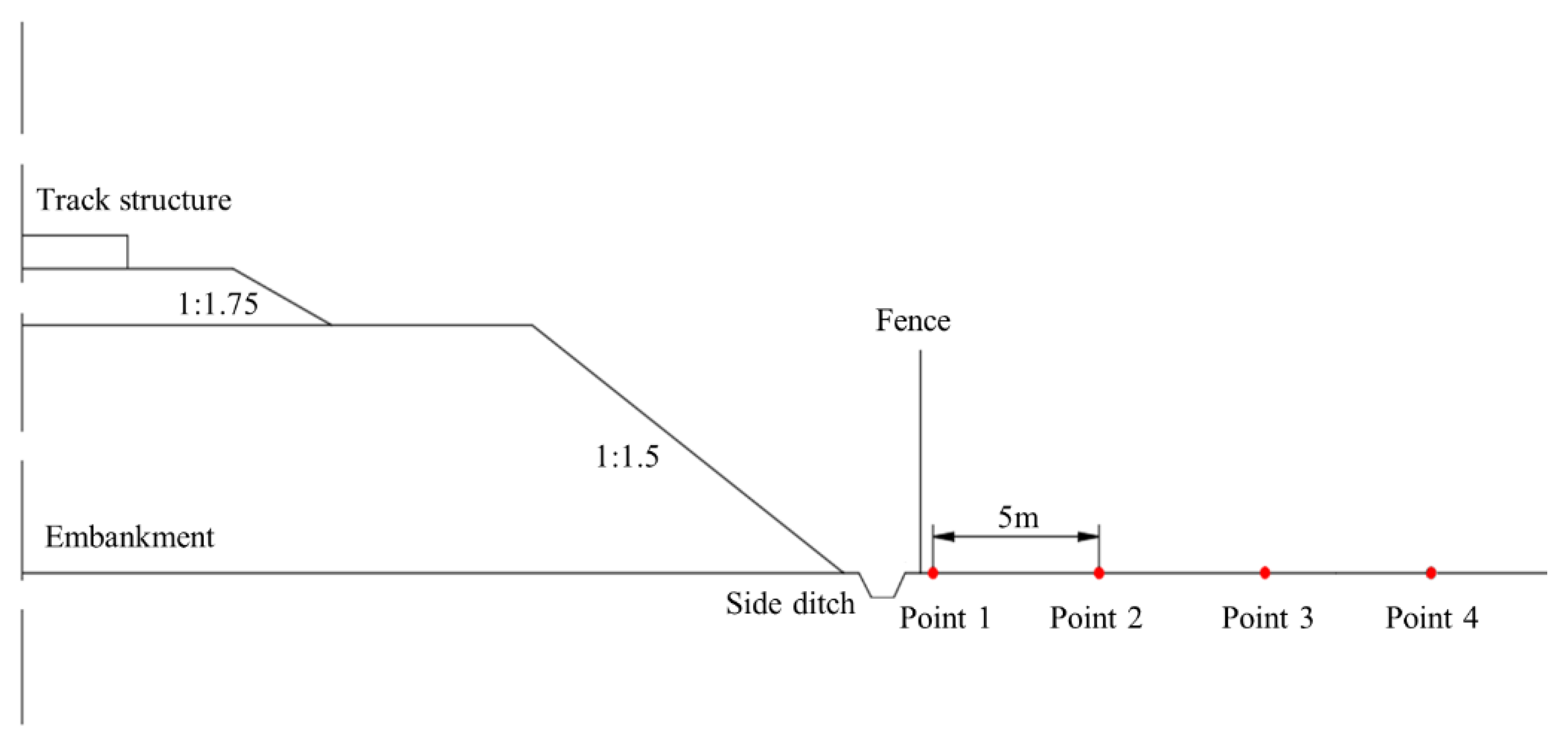
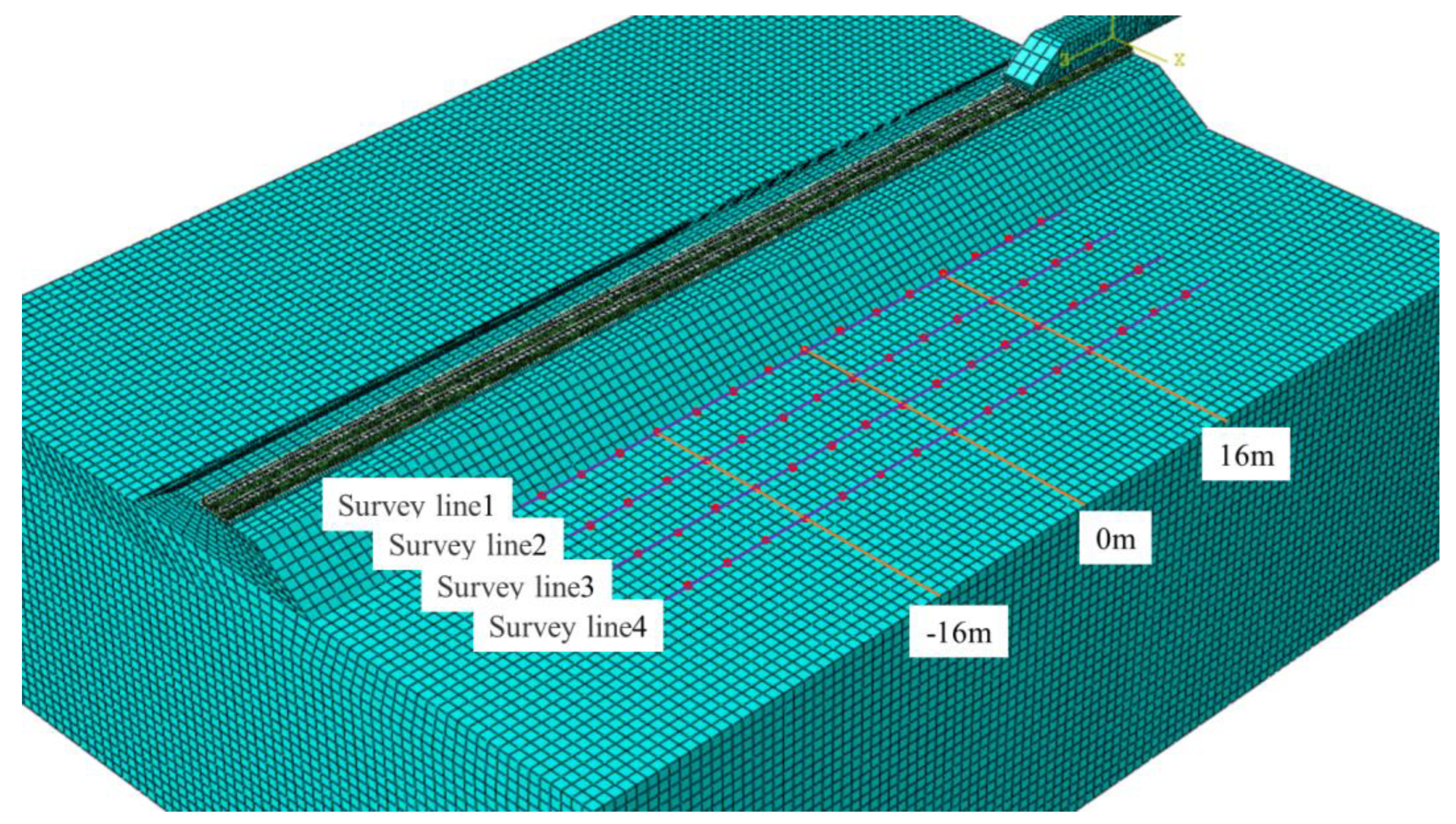
2.3. Design of Monitoring Points and Conditions
3. Results and Discussion
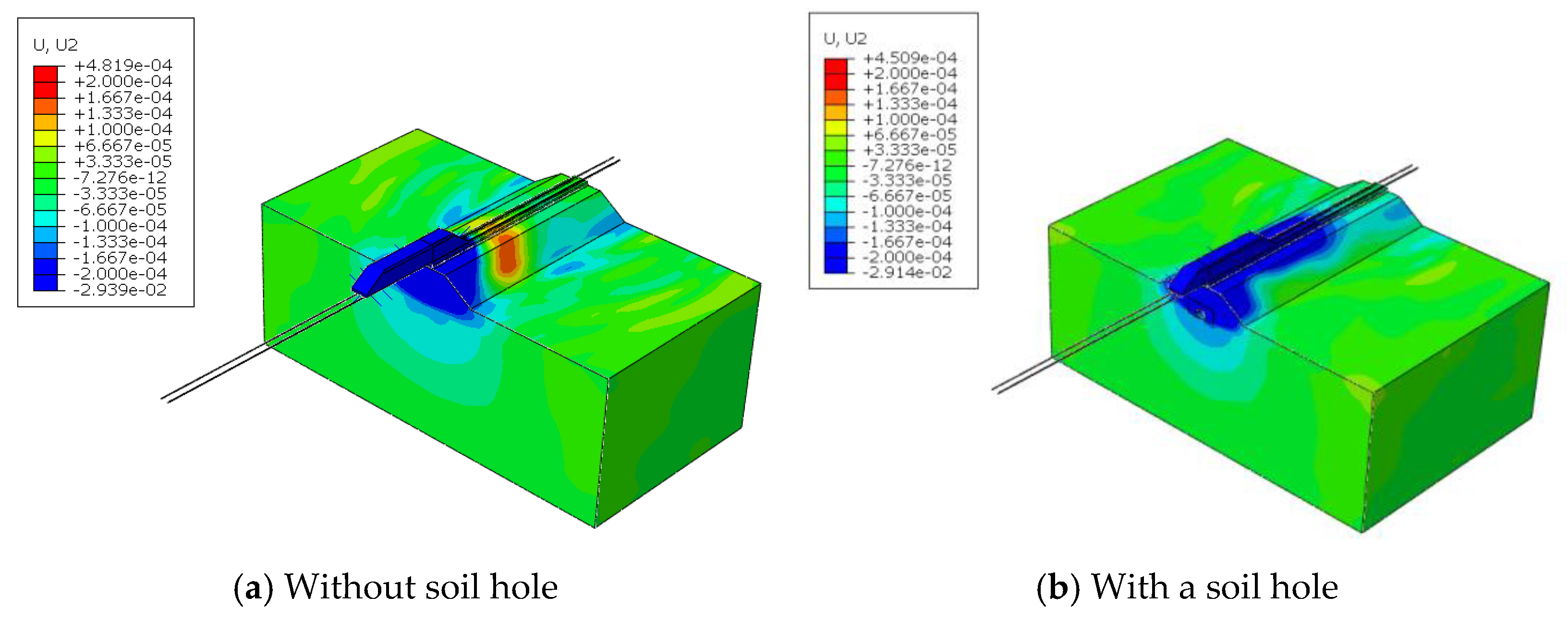
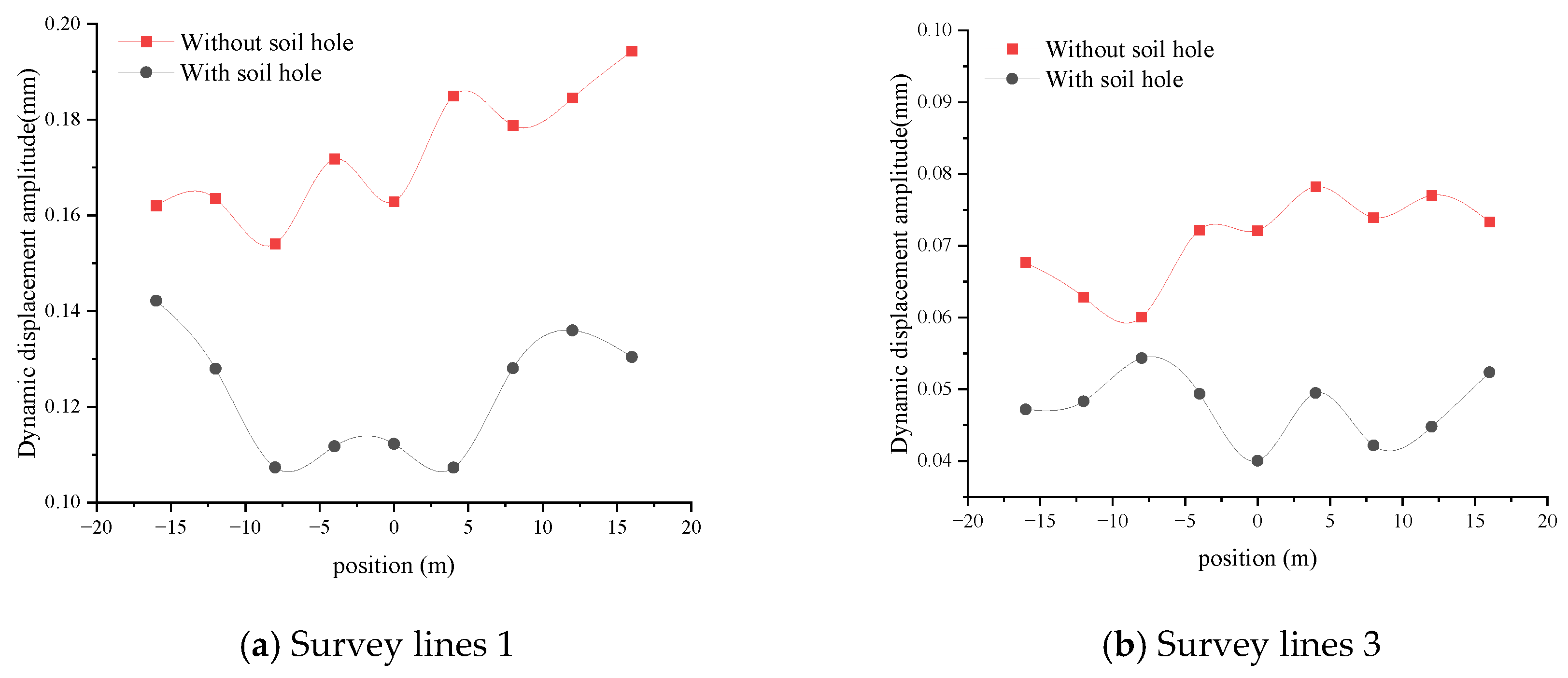
3.1. Distribution Characteristics of the Subgrade Dynamic Displacement
3.2. Distribution Characteristics of the Subgrade Vibration Acceleration
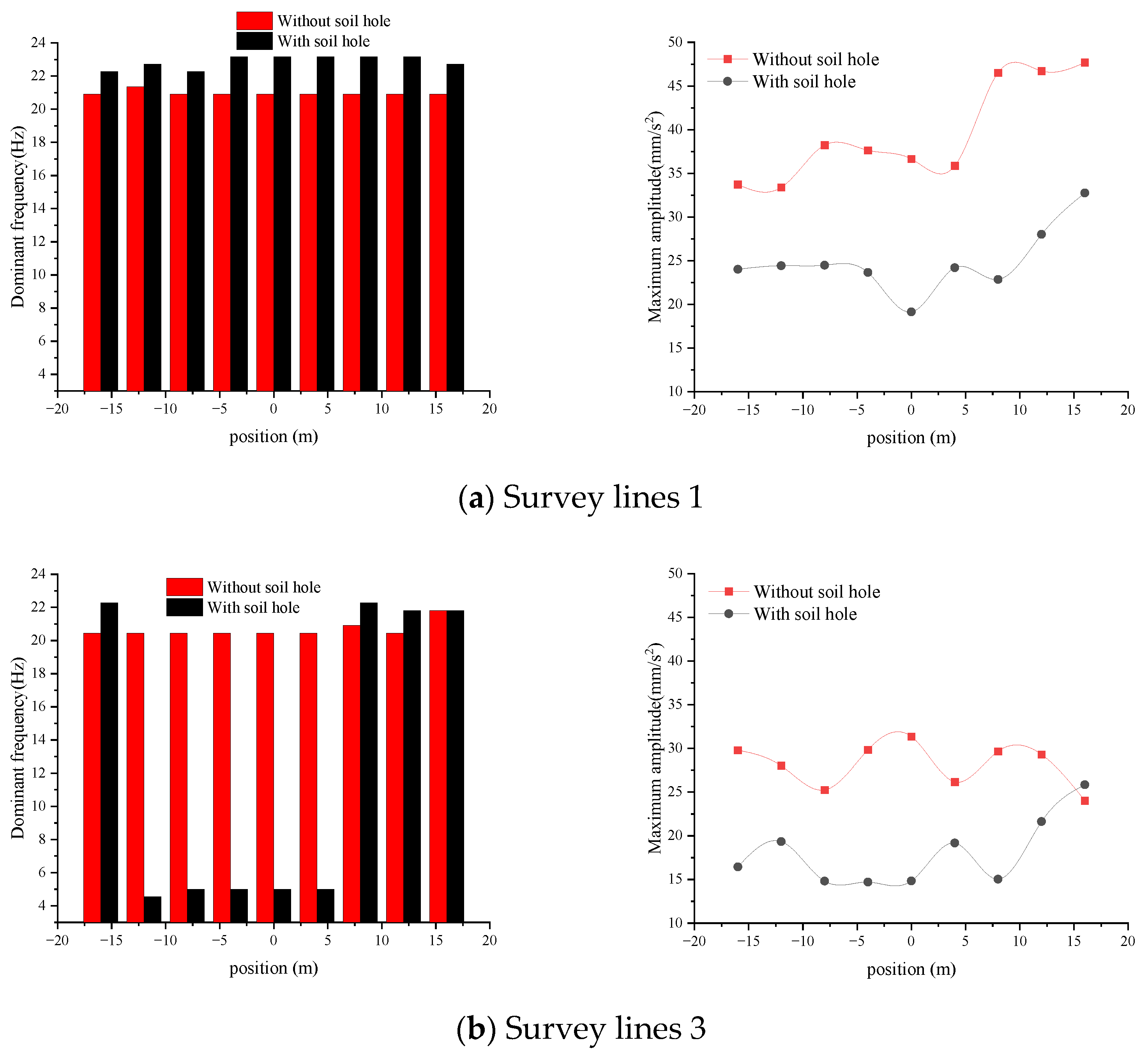
3.3. Distribution Characteristics of the Dominant Frequency and Amplitude of Subgrade Vibrations
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gutiérrez, F.; Parise, M.; De Waele, J.; Jourde, H. A review on natural and human-induced geohazards and impacts in karst. Earth-Sci. Rev. 2014, 138, 61–88. [Google Scholar] [CrossRef]
- An, B.L.; Gao, L.; Xin, T.; Xiang, G.R.; Wang, J. A Novel Approach of Identifying Railway Track Rail’s Modal Frequency from Wheel-Rail Excitation and its Application in High-Speed Railway Monitoring. IEEE Access 2019, 7, 180986–180997. [Google Scholar] [CrossRef]
- Gutiérrez, F.; Zarroca, M.; Linares, R.; Roqué, C.; Carbonel, D.; Guerrero, J.; McCalpin, J.P.; Comas, X.; Cooper, A.H. Identifying the Boundaries of Sinkholes and Subsidence Areas via Trenching and Establishing Setback Distances. Eng. Geol. 2018, 233, 255–268. [Google Scholar] [CrossRef]
- Fan, H.B.; Zhang, Y.H.; He, S.Y.; Wang, K.; Wang, X.L.; Wang, H. Hazards and Treatment of Karst Tunneling in Qinling-Daba Mountainous Area: Overview and Lessons Learnt from Yichang-Wanzhou Railway System. Environ. Earth Sci. 2018, 77, 1–18. [Google Scholar] [CrossRef]
- Akin, J.E.; Mofid, M. Numerical solution for response of beams with moving mass. J. Struct. Eng. 1989, 115, 120–131. [Google Scholar] [CrossRef]
- Mofid, M.; Akin, J.E. Discrete element response of beams with traveling mass. Adv. Eng. Softw. 1996, 25, 321–331. [Google Scholar] [CrossRef]
- Lee, U. Separation between the flexible structure and the moving mass sliding on it. J. Sound Vib. 1998, 209, 867–877. [Google Scholar] [CrossRef]
- Yamchelou, M.T.; Nikbin, I.M.; Zareian, H.; Charkhtab, S. Assessing Absolute Maximum Vibration Amplitude of a Rectangular Plate Subjected to a Moving Mass. Iran. J. Sci. Technol. Trans. Civ. Eng. 2017, 41, 135–147. [Google Scholar] [CrossRef]
- Ye, Z.C.; Chen, H.H. Vibration analysis of a simply supported beam under moving mass based on moving finite element method. Front. Mech. Eng. China 2009, 4, 397–400. [Google Scholar] [CrossRef]
- Chen, Q.; Yang, G.L.; Wang, X.F. Natural frequency analysis of Euler-Bernoulli beam subjected to moving mass. Chin. J. Comput. Mech. 2012, 29, 340–344. [Google Scholar]
- De Oliveira, F.M.; Greco, M. Nonlinear dynamic analysis of beams with layered cross sections under moving masses. J. Braz. Soc. Mech. Sci. Eng. 2015, 37, 451–462. [Google Scholar] [CrossRef]
- He, Z.M.; Yang, Y.; Zeng, X.F.; Liu, S.Z. Response Analysis of Subgrade Deformation in Evolution of Concealed Soil Cave. J. Cent. South Univ. (Sci. Technol.) 2018, 49, 3068–3076. [Google Scholar]
- Ling, X.Z.; Chen, S.J.; Zhu, Z.Y.; Zhang, F.; Wang, L.N.; Zou, Z.Y. Field Monitoring on the Train-Induced Vibration Response of Track Structure in the Beiluhe Permafrost Region Along Qinghai-Tibet Railway in China. Cold Reg. Sci. Technol. 2010, 60, 75–83. [Google Scholar] [CrossRef]
- Ling, X.Z.; Zhang, F.; Zhu, Z.Y.; Ding, L.; Hu, Q.L. Field Experiment of Subgrade Vibration Induced by Passing Train in a Seasonally Frozen Region of Daqing. Earthq. Eng. Eng. Vib. 2009, 8, 149–157. [Google Scholar] [CrossRef]
- Auersch, L. Ground Vibration due to Railway Traffic—The Calculation of the Effects of Moving Static Loads and their Experimental Verification. J. Sound Vib. 2006, 293, 599–610. [Google Scholar] [CrossRef]
- Cai, Y.Q.; Guo, L.; Jardine, R.J.; Wang, J. Stress-strain Response of Soft Clay to Traffic Loading. Géotechnique 2017, 67, 446–451. [Google Scholar] [CrossRef]
- Liu, W.Z.; Huang, X.J.; Sun, X.; Feng, X.M.; Gao, F.L. Field Tests on Dynamic Response and Characteristics of Lateritic Soil Subgrade under the Combined Action of Wetting and Cyclic Loading. Soil Dyn. Earthq. Eng. 2024, 181, 108688. [Google Scholar] [CrossRef]
- Li, Z.F.; Yang, X.X.; Zhang, S.; Yu, Y.; Lin, Y.H.; Wu, J.C. Analysis of Soil Differences in Subway Vibration Transmission Paths. Buildings 2024, 14, 1338. [Google Scholar] [CrossRef]
- Li, X.; Bai, M.Z.; Wei, Z.J.; Li, P.X.; Shi, H.; Zhang, Y. Dynamic Response and Stability Analysis of High-Speed Railway Subgrade in Karst Areas. IEEE Access 2021, 9, 129188–129206. [Google Scholar]
- Li, P.X.; Bai, M.Z.; Wei, Z.J.; Li, X.; Shi, H. Stability Analysis of Subgrade under Dynamic Loading of Single and Double High-Speed Railways in Karst Areas. KSCE J. Civ. Eng. 2022, 26, 3301–3313. [Google Scholar] [CrossRef]
- Qu, C.Z.; Tan, X.Y.; Xiao, Y.J.; Wang, Z.; Wei, L.M. Subgrade Vibrations and Long-term Stability of an Embankment-bridge Transition Zone in Non-Ballasted High-Speed Railway. Transp. Geotech. 2024, 45, 101199. [Google Scholar] [CrossRef]
- Bai, M.Z.; Liu, H.Y.; Cui, Z.Z.; Wang, D.Y.; Han, J.T.; Gao, C.R.; Li, S.L. A Study on the Influence of Steel Structures in Concrete Subgrades on the Detection of Subgrade Distresses by Ground-penetrating Radar. Sustainability 2023, 15, 16656. [Google Scholar] [CrossRef]
- Hou, Z.Z.; Zhao, W.G.; Yang, Y. Identification of Railway Subgrade Defects based on Ground Penetrating Radar. Sci. Rep. 2023, 13, 6030. [Google Scholar] [CrossRef] [PubMed]
- Ye, Z.J.; Zhang, C.P.; Ye, Y. Principle of a Low-frequency Transient Electromagnetic Radar System and its Application in the Detection of Underground Pipelines and Voids. Tunn. Undergr. Space Technol. 2022, 122, 104392. [Google Scholar] [CrossRef]
- Ren, J.J.; Liu, W.; Du, W.; Zheng, J.L.; Wei, H.; Zhang, K.Y.; Ye, W.L. Identification Method for Subgrade Settlement of Ballastless Track based on Vehicle Vibration Signals and Machine Learning. Constr. Build. Mater. 2023, 369, 130573. [Google Scholar] [CrossRef]
- Xiao, J.H.; Bai, Y.Q.; Liu, X.Z.; Song, C.J.; Sun, S.Q.; Liu, X.Z. Feature Analysis of Precipitation-induced Subgrade Defects on a High-Speed Rail Ballasted Track Using Multiple Track Inspection Data: A Case Study. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2024, 238, 09544097241234094. [Google Scholar] [CrossRef]
- Dong, L.H.; Chen, J.D.; Song, D.Q.; Wang, C.W.; Liu, X.L.; Liu, M.X.; Wang, E.Z. Application of Long-range Cross-hole Acoustic Wave Detection Technology in Geotechnical Engineering Detection: Case Studies of Tunnel-Surrounding Rock, Foundation and Subgrade. Sustainability 2022, 14, 16947. [Google Scholar] [CrossRef]
- Li, D.; Zhang, J.F.; Wang, C.W.; Jiang, F.X. Propagation Patterns of Microseismic Waves in Rock Strata During Mining: An Experimental Study. Int. J. Miner. Metall. Mater. 2019, 26, 531–537. [Google Scholar] [CrossRef]
- Liu, X.L.; Han, M.S.; Li, X.B.; Liu, Z. Elastic Wave Attenuation Characteristics and Relevance for Rock Microstructures. J. Min. Sci. 2020, 56, 216–225. [Google Scholar] [CrossRef]
- Duan, C.L.; Yan, C.H.; Xu, B.T.; Zhou, Y.K. Crosshole Seismic CT Data Field Experiments and Interpretation for Karst Caves in Deep Foundations. Eng. Geol. 2017, 228, 180–196. [Google Scholar] [CrossRef]
- Li, Q.G.; Lin, F.P.; Hu, Q.T.; Jiang, Z.Z.; Wu, X.B.; Qian, Y.N. Experimental Study on Attenuation Characteristics of Elastic Waves Propagation in Layered Coal Rock. Coal Sci. Technol. 2022, 50, 184–190. [Google Scholar]
- Jing, G.; Zhao, Y.X.; Wang, H.; Montanari, P.M.; Lacidogna, G. Study of Coal and Magnetite Collapse Process and Precursor based on Acoustic Emission Flicker Noise Spectroscopy. Rock Mech. Rock Eng. 2024, 1–18. [Google Scholar] [CrossRef]
- Shen, J.G.; Liu, J.C.; Shen, Y.J. Coupling Characteristics of Mode Waves and Resonant Waves in Roadbed Erosion Detection. Prog. Geophys. 2022. Available online: http://kns.cnki.net/kcms/detail/11.2982.P.20221228.1012.015.html (accessed on 27 August 2024).
- Li, J.; Chen, S.X.; Yu, F.; Dai, Z.J. Remote Monitoring for a High-Speed Railway Subgrade Structure State in a Mountainous Area and its Response Analysis. Bull. Eng. Geol. Environ. 2018, 77, 409–427. [Google Scholar] [CrossRef]
- Deng, Z.X.; Xie, K.; Wang, W.B.; Su, Q.; Xu, L.R.; Li, J.S.; Liu, B. A New Method of Rapid-Intelligent Assessment for the Dynamic Service Performance in High-Speed Railway Subgrade. Int. J. Rail Transp. 2024, 1–28. [Google Scholar] [CrossRef]
- Aggestam, E.; Nielsen, J.C.O. Simulation of Vertical Dynamic Vehicle–Track Interaction Using a Three-Dimensional Slab Track Model. Eng. Struct. 2020, 222, 110972. [Google Scholar] [CrossRef]
- TB10098-2017; Code for Design of High Speed Railway. National Railway Administration of the People’s Republic of China: Beijing, China, 2014.
- Guo, X.R.; Yang, Y.F.; Wang, C.; Ling, L.; Wang, K.Y.; Zhai, W.M. Influence of Wheel/Rail Dynamic Interaction Induced by Polygonal Wheels under Braking Condition. J. Mech. Eng. 2023, 59, 196–203. [Google Scholar]
- Si, L.T.; Zhao, Y.; Zhang, Y.H. Dynamic Response of Viscoelastic Half-space Subjected to Moving Random Line Loads. Eng. Mech. 2016, 33, 98–106. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | Parameter | Unit | Value |
|---|---|---|---|
| Carbody | Length | m | 25.85 |
| Width | m | 3.3 | |
| Height | m | 3.9 | |
| Wheelbase | m | 1.435 | |
| Axle load | N | 478,800 | |
| Axle | Weight | N | 17,950 |
| Bogie | Weight | N | 44,700 |
| Parameter | Unit | Value |
|---|---|---|
| Vertical stiffness | N/m | 4.5 × 107 |
| Lateral stiffness | N/m | 3.0 × 102 |
| Vertical damping | N·s/m | 6.0 × 104 |
| Lateral damping | N·s/m | 3.625 × 104 |
| Longitudinal damping | KN/group | 9 |
| Spacing | m | 0.6 |
| Structural Layer | Model Parameters | Rayleigh Damping Coefficients | |||
|---|---|---|---|---|---|
| Parameter | Unit | Value | Parameter (Unit: s−1) | Value | |
| Rail | Elastic modulus | GPa | 210 | 0.0328 | |
| Poisson’s ratio | 0.3 | ||||
| Cross-sectional area | cm3 | 76.45 | 0.0031 | ||
| Density | kg·m−3 | 7800 | |||
| Track slab | Elastic modulus | GPa | 35.5 | 0.0983 | |
| Poisson’s ratio | 0.2 | ||||
| Length × Width × Thickness | m × m × m | 100 × 2.55 × 0.2 | 0.0092 | ||
| Density | kg·m−3 | 2500 | |||
| CA mortar | Elastic modulus | MPa | 7000 | 0.0983 | |
| Poisson’s ratio | 0.2 | ||||
| Thickness | M | 0.03 | 0.0092 | ||
| Density | kg·m−3 | 1800 | |||
| Supporting layer | Elastic modulus | GPa | 22 | 0.0983 | |
| Poisson’s ratio | 0.2 | ||||
| Span × Thickness | m × m | (2.95/3.25) × 0.3 | 0.0092 | ||
| Density | kg·m−3 | 2500 | |||
| Subgrade surface layer | Elastic modulus | GPa | 220 | 0.2620 | |
| Poisson’s ratio | 0.25 | ||||
| Density | kg·m−3 | 2100 | |||
| Cohesion | KPa | 35 | 0.0244 | ||
| Internal friction angle | ° | 43 | |||
| Length × Thickness | m × m | 100 × 0.4 | |||
| Subgrade bottom layer | Elastic modulus | GPa | 130 | 0.2293 | |
| Poisson’s ratio | 0.3 | ||||
| Density | kg·m−3 | 1900 | |||
| Cohesion | KPa | 13 | 0.0214 | ||
| Internal friction angle | ° | 28 | |||
| Length × Thickness | m × m | 100 × 2.3 | |||
| Subgrade body | Elastic modulus | GPa | 50 | 0.2750 | |
| Poisson’s ratio | 0.2 | ||||
| Density | kg·m−3 | 1800 | |||
| Cohesion | KPa | 30 | 0.0305 | ||
| Internal friction angle | ° | 25 | |||
| Length × Thickness | m × m | 100 × 1.3 | |||
| Surface soil layer of the foundation | Elastic modulus | GPa | 50 | 0.2454 | |
| Poisson’s ratio | 0.2 | ||||
| Density | kg·m−3 | 1800 | |||
| Cohesion | KPa | 30 | 0.0016 | ||
| Internal friction angle | ° | 25 | |||
| Length × Width × Thickness | m × m × m | 100 × 80 × 3 | |||
| Bedrock | Elastic modulus | GPa | 190 | 0.2454 | |
| Poisson’s ratio | 0.25 | ||||
| Density | kg·m−3 | 2650 | |||
| Cohesion | KPa | 20 | 0.0016 | ||
| Internal friction angle | ° | 44.3 | |||
| Length × Width × Thickness | m × m × m | 100 × 80 × 27 | |||
| Distance from Soil Cavity (m) | Survey Lines 1 | Survey Lines 3 | ||||
|---|---|---|---|---|---|---|
| Dynamic Displacement Amplitudes (mm) | Attenuation Coefficient (%) | Dynamic Displacement Amplitudes (mm) | Attenuation Coefficient (%) | |||
| Normal Subgrade | Karst Subgrade | Normal Subgrade | Karst Subgrade | |||
| −16 | 0.1620 | 0.1422 | 12.35 | 0.0677 | 0.0472 | 30.22 |
| −12 | 0.1635 | 0.1280 | 21.73 | 0.0629 | 0.0483 | 23.11 |
| −8 | 0.1541 | 0.1073 | 30.33 | 0.0601 | 0.0543 | 9.55 |
| −4 | 0.1718 | 0.1117 | 34.96 | 0.0722 | 0.0494 | 31.61 |
| 0 | 0.1628 | 0.1123 | 33.29 | 0.0701 | 0.0401 | 44.47 |
| 4 | 0.1850 | 0.1073 | 41.98 | 0.0782 | 0.0495 | 36.72 |
| 8 | 0.1788 | 0.1281 | 28.37 | 0.0739 | 0.0422 | 37.92 |
| 12 | 0.1845 | 0.1360 | 29.31 | 0.0770 | 0.0448 | 35.83 |
| 16 | 0.1943 | 0.1304 | 28.99 | 0.0733 | 0.0524 | 28.55 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, M.; Yang, L.; Wei, Y.; Liu, H. Study on Dynamic Response Characteristics and Monitoring Indicators of High-Speed Railway Subgrade in Karst Areas. Appl. Sci. 2024, 14, 8715. https://doi.org/10.3390/app14198715
Bai M, Yang L, Wei Y, Liu H. Study on Dynamic Response Characteristics and Monitoring Indicators of High-Speed Railway Subgrade in Karst Areas. Applied Sciences. 2024; 14(19):8715. https://doi.org/10.3390/app14198715
Chicago/Turabian StyleBai, Mingzhou, Ling Yang, Yanfeng Wei, and Hongyu Liu. 2024. "Study on Dynamic Response Characteristics and Monitoring Indicators of High-Speed Railway Subgrade in Karst Areas" Applied Sciences 14, no. 19: 8715. https://doi.org/10.3390/app14198715
APA StyleBai, M., Yang, L., Wei, Y., & Liu, H. (2024). Study on Dynamic Response Characteristics and Monitoring Indicators of High-Speed Railway Subgrade in Karst Areas. Applied Sciences, 14(19), 8715. https://doi.org/10.3390/app14198715