1. Introduction
The control algorithm of a wind turbine plays a crucial role in determining its operational performance. Control algorithms can be classified into the two following types: power control and load reduction control. Power control can be further divided into generator torque control and blade pitch control, depending on the type of control command signal. Generator torque control refers to the maximum power point tracking (MPPT)-based torque command adjustment to produce maximum power in the operating region with wind speeds lower than the rated wind speed, known as Region II. Blade pitch control, on the other hand, refers to the pitch angle command adjustment to maintain the rated rotor speed and power in the operating region with wind speeds higher than the rated wind speed, known as Region III [
1,
2,
3]. Load reduction control is a control strategy aimed at reducing thrust and moments acting on the wind turbine, and algorithms based on it can be designed through the application of additional control logic for specific purposes [
4]. Recently, control strategies that consider the dynamic behavior of the wind turbine drive train have been introduced, addressing issues related to fatigue damage in wind turbines [
5]. Typically, wind turbine control algorithms include basic power control algorithms supplemented with classical single-input–single-output (SISO) control algorithms, such as proportional
(P), proportional–integral (PI), and proportional–integral–derivative (PID) control techniques, for objectives including vibration or load reduction. Additionally, modern multi-input–multi-output (MIMO) control algorithms have been proposed to improve the performance of multi-loop SISO-based classical control logic [
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17]. Classical control-based vibration and load reduction techniques include drive train dampers [
4], feed-forward control algorithms [
6,
7,
8], individual pitch control algorithms [
9,
10], peak shaving [
11], and tower dampers [
12]. Modern control techniques based on MIMO algorithms include optimal control [
14,
15] and robust control [
16,
17].
Some classical control-based algorithms with SISO, as well as modern control algorithms, utilize wind speed obtained through wind speed estimation algorithms as essential parameters [
13,
14,
15,
16]. Wind speed estimation algorithms for wind turbines refer to algorithms that estimate the equivalent wind speed acting on the current target wind turbine, using parameters measured from the wind turbine and a simplified wind turbine model [
8,
18]. Wind speed estimation is generally performed via the wind turbine controller, and the estimated wind speed is used for various purposes depending on the algorithm; for instance, it can be used to calculate the available power at individual wind turbines for wind farm control, as parameters for feed-forward control algorithms to improve operational performance, and as one of the input parameters for modern control algorithms based on MIMO. The prediction accuracy of thusly estimated wind speed can influence control performance, necessitating research to investigate and improve prediction accuracy [
19,
20,
21,
22].
There are two primary methods for estimating wind speed within wind turbine control algorithms using measured parameters to integrate and apply wind turbine control algorithms. The first method is a 3D look-up table-based estimation method, constructed using the aerodynamic torque calculation formula and drive train differential equations, which estimates wind speed using generator torque, blade pitch angle, and rotor speed as inputs [
8,
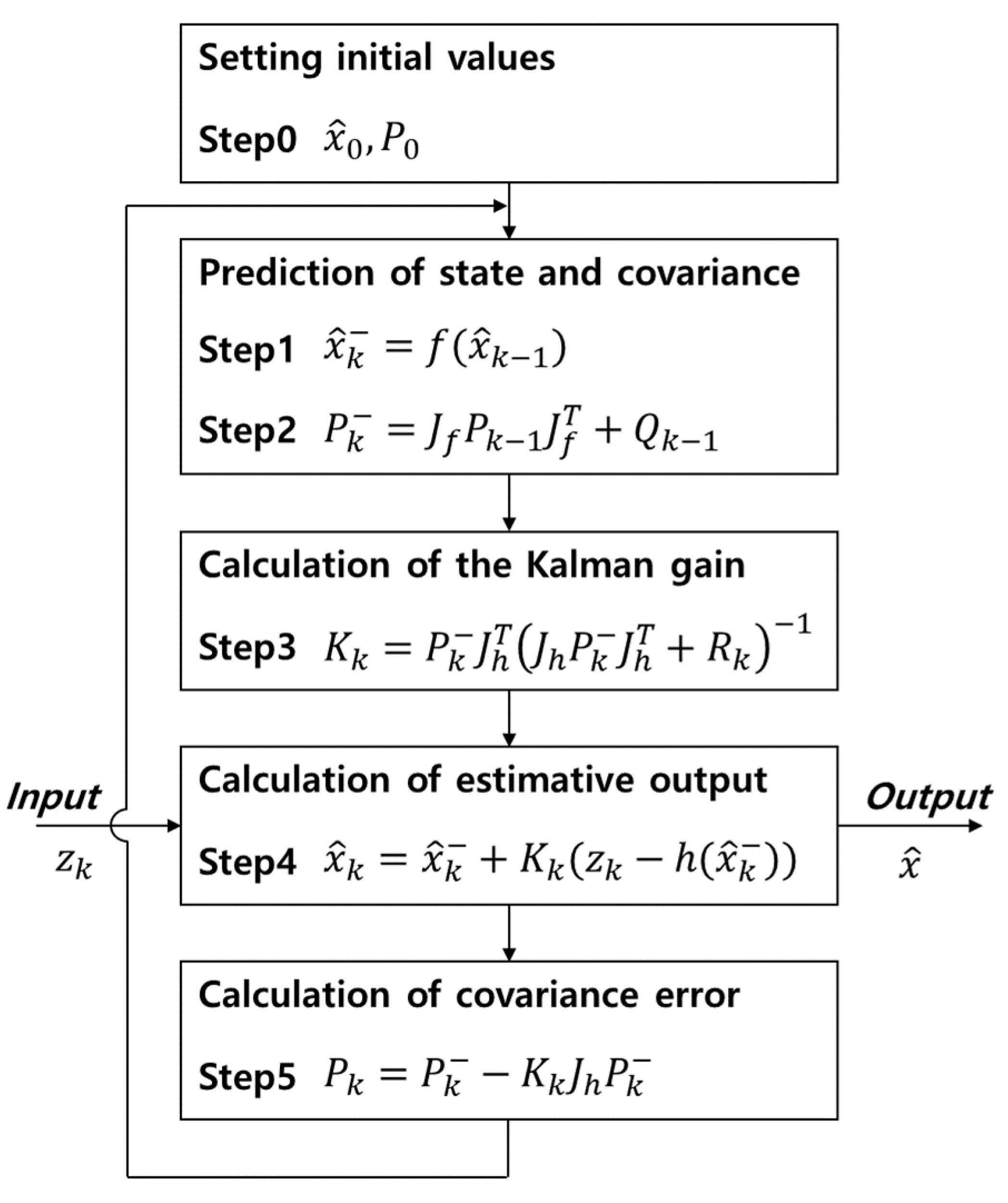
18]. The second method employs an extended Kalman filter, designed based on a 3D wind field model and a nonlinear rotor model, as applied in the recently presented reference open-source controller (ROSCO) [
23].
The drive train model-based estimation method has been applied as an input parameter in several control algorithm cases presented in the literature. Nam designed a wind speed estimation algorithm and a feed-forward control algorithm for a multi-MW wind turbine and performed a simulation based on a numerical model. The analysis results indicated that the feed-forward control algorithm effectively reduced the standard deviations of both rotor speed and generator output by approximately 50% [
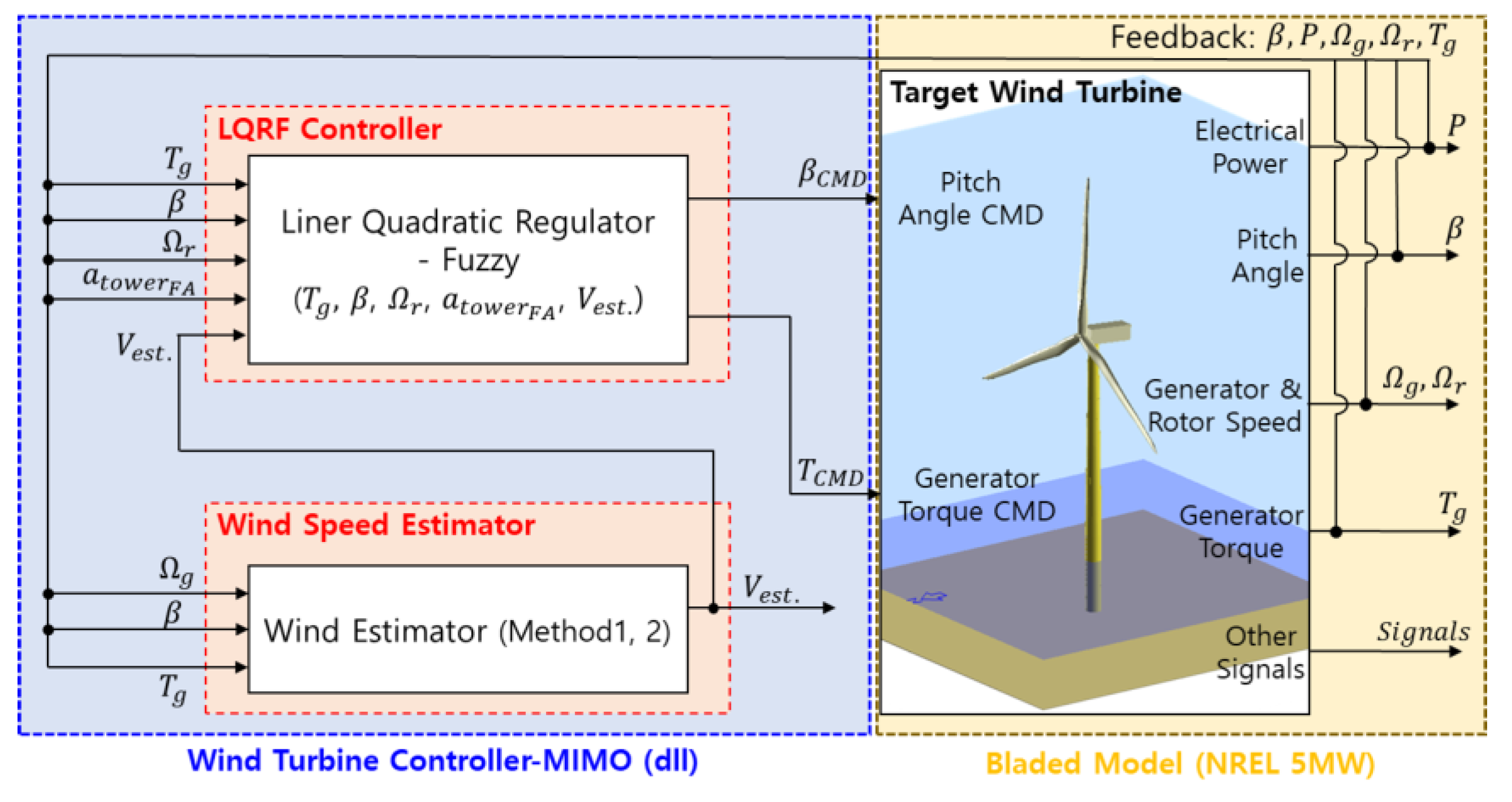
8]. Jeon designed an LQR controller based on fuzzy logic for the NREL 5MW model and conducted simulations using the Bladed program. Additionally, the same algorithm was applied to a scaled-down wind turbine model, and experimental verification was conducted in a wind tunnel. The experimental results showed that the standard deviations of rotor speed and generator output were reduced by approximately 36.39% and 38.94%, respectively [
14].
In recent research on available power estimation for the application of wind farm control algorithms, a comparative analysis of various wind speed estimation algorithms based on simplified wind turbine models was conducted [
18]. In this study, a wind speed estimation algorithm based on a drive train model was compared with a simpler model-based wind speed estimation algorithm that excludes the time derivative term of the drive train model. The comparison results indicated that the simpler model-based wind speed estimation algorithm is more advantageous for available power estimation.
Some of the literature has proposed Kalman filter-based methods that do not use the drive train model of wind turbines. Song et al. proposed a wind speed estimation algorithm using a non-standard extended Kalman filter to enhance wind turbine performance, confirming improved maximum power control performance through optimal tip speed ratio (TSR) tracking. According to simulation results, applying the proposed wind speed estimation algorithm to optimal TSR tracking control could increase annual energy production by approximately 0.8% [
24]. Abbs et al. proposed a wind speed estimation algorithm based on the extended Kalman filter and applied it to a floating wind turbine control algorithm. Simulation results under average 11 m/s conditions indicated a root mean square error (RMSE) of approximately 0.48 m/s for estimated wind speed based on average rotor speed. The estimated wind speed was utilized for optimal TSR tracking control, torque control, and minimum pitch angle calculation for peak shaving, the application of which reduced rotor thrust in the Region II-1/2 area by approximately 20% [
23].
As previously described, various studies have been presented in the literature on the application and validation of wind turbine controllers using either drive train model or Kalman filter-based estimated wind speeds. However, there is a lack of research comparing and validating the differences in wind speed prediction accuracy and controller performance between these two methods. There is a need for research that results in selecting the most suitable wind speed estimation method for control algorithms in order to enhance the operational performance of wind turbines.
Therefore, this study aims to compare the prediction accuracy of the drive train model-based wind speed estimation algorithm with that of the Kalman filter-based wind speed estimation algorithm, proposed in the literature for application in wind turbine control, and to compare their performance when applied to the same controller. Performance comparisons were conducted focusing on feed-forward control algorithms for classic control, available power estimation algorithms for pitch control, and the linear quadratic regulator based on the fuzzy logic (LQRF) control algorithm. The aforementioned algorithms, previously proposed in other studies, were applied and validated on the selected NREL 5MW model, specifically chosen for this research. The originality and contribution of this study, compared to existing research, can be summarized as follows.
Firstly, a quantitative comparison was conducted to assess the prediction accuracy of two representative wind speed estimation algorithms widely used in previous studies, the drive train model-based method and the Kalman filter-based method, both applied to the same wind turbine; this comparison enabled our determination of the preferable wind speed estimation algorithm.
Secondly, the performance comparison of these wind speed estimation algorithms not only evaluated their prediction accuracy, but also assessed their applications to control algorithms intended for actual wind turbines. The evaluation aimed to determine which method offers superior control performance through the application of control algorithms utilizing estimated wind speed as an input parameter; this included both classical and modern control algorithms, such as feed-forward control, available power estimation algorithms, and LQRF algorithms [
8,
13,
14,
15,
16,
19,
20].
Thirdly, the Bladed program, a validated aeroelastic simulation tool typically used for wind turbine certification, was utilized instead of a simple Matlab-based wind turbine model to compare the control algorithms, which were implemented as external controllers in dynamic link library (DLL) format, and performance analysis was conducted under 3D turbulent wind conditions, simulating environments closely resembling those encountered by actual wind turbines.
4. Simulation Validation
The control algorithms of the target wind turbine, including the feed-forward control, available power estimation, LQRF control algorithms, and wind speed estimation algorithm, were designed using Matlab/Simulink (R2024b) and finalized in DLL format. The DLL format external controller was integrated with the Bladed dynamic simulation program for control performance verification. Bladed simulation, while less reliable than experimental validation, is a performance verification method that can be considered before applying control algorithms to actual wind turbines. Although it may differ slightly from real-world conditions, it is commonly used in research for verifying control algorithms.
Figure 5 provides a brief overview of the procedural steps involved in the simulation utilized in this study, the process of which can be divided into control algorithm design, DLL file creation, and simulation using the Bladed program. Specifically, the Bladed simulation involved several detailed stages, including wind turbine modeling, wind condition setting, controller application, and analysis.
Figure 6 presents the comparison between the wind speed estimation results and the rotor mean wind speed under average wind speed conditions of 18 m/s and normal turbulence model (NTM) Class A. The rotor mean wind speed represents the equivalent wind applied across the rotor plane of the wind turbine, assumed as the reference value for comparison in this study. The black line denotes the rotor mean wind speed, the blue line shows the wind speed estimation results based on the 3D look-up table method, and the red line indicates the wind speed estimation results based on the Kalman filter method. Both wind speed estimation methods exhibit similar trends to the estimated wind speeds, and the validation of wind speed prediction was conducted by comparing mean wind speeds and standard deviation values.
Table 2 quantitatively presents the rotor mean wind speed and wind speed estimation results under the condition of an average wind speed of 18 m/s. For the 3D look-up Table method, the errors in mean wind speed and standard deviation are approximately 2.58% and 2.75%, respectively; meanwhile, for the Kalman filter method, they are approximately 5.67% and 3.61%, respectively.
To compare the wind speed estimation algorithms, one algorithm each from SISO-based classical control, algorithms applicable to wind farm control, and MIMO-based modern control was selected and simulated. The following section presents the simulation conditions and results, and compares the performance results of the two wind speed estimation methods.
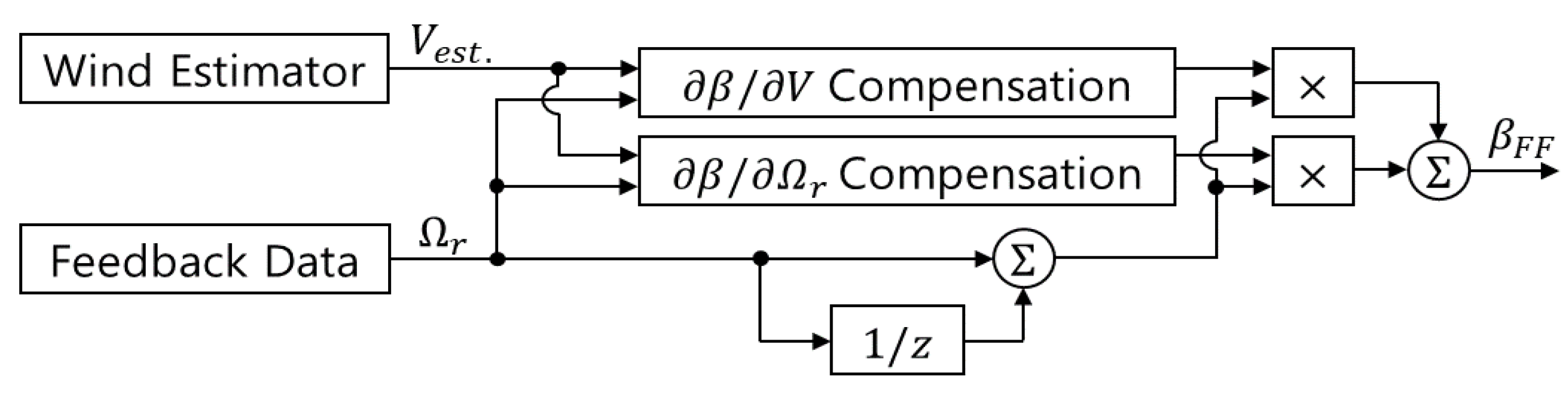
4.1. Validation 1: Feed-forward Control Algorithm
The dynamic simulation was conducted using the NREL 5MW model as the target wind turbine. The simulation conditions involved wind speeds higher than the rated wind speed (18 m/s) with a Class A standard turbulence model, and each condition was simulated for 600 s.
The results of performance verification on the feed-forward control algorithm using estimated wind speeds according to the wind speed estimation methods are shown in
Figure 7. The simulation results display rotor speed, pitch angle, generator torque, and output values, where the solid black line represents the baseline output control algorithm, and the blue and red solid lines depict the simulation results of the feed-forward control algorithm with different wind speed estimation methods. While operational performance appears similar, differences in rotor speed and output standard deviations can be observed.
Table 3 presents the comparison results of the means and standard deviations of rotor speed and generator output and confirms that the application of the feed-forward control algorithm improved operational performance compared to the baseline output control algorithm. With the feed-forward control using the 3D look-up table method, the standard deviations of rotor speed and generator output decreased by approximately 6.04% and 8.70%, respectively. For the Kalman filter method, these reductions were approximately 2.05% and 1.93%, respectively. According to the simulation results, the feed-forward control using the 3D look-up table method demonstrated slightly superior performance, indicating that, although the feed-forward control algorithm was applied identically, differences in wind speed estimation methods resulted in varying operational performance of the wind turbine. Therefore, since the accuracy of wind speed estimation can affect the control performance of wind turbines, it is necessary to choose a more accurate or suitable method.
4.2. Validation 2: Available Power Estimator
The simulation employing the available power estimation algorithm was conducted using the same model, under simulation conditions of wind speeds lower than the rated wind speed (8 m/s) with a Class A standard turbulence model. The analysis was performed for 600 s in a dynamic simulation environment with different wind speed estimation algorithms applied.
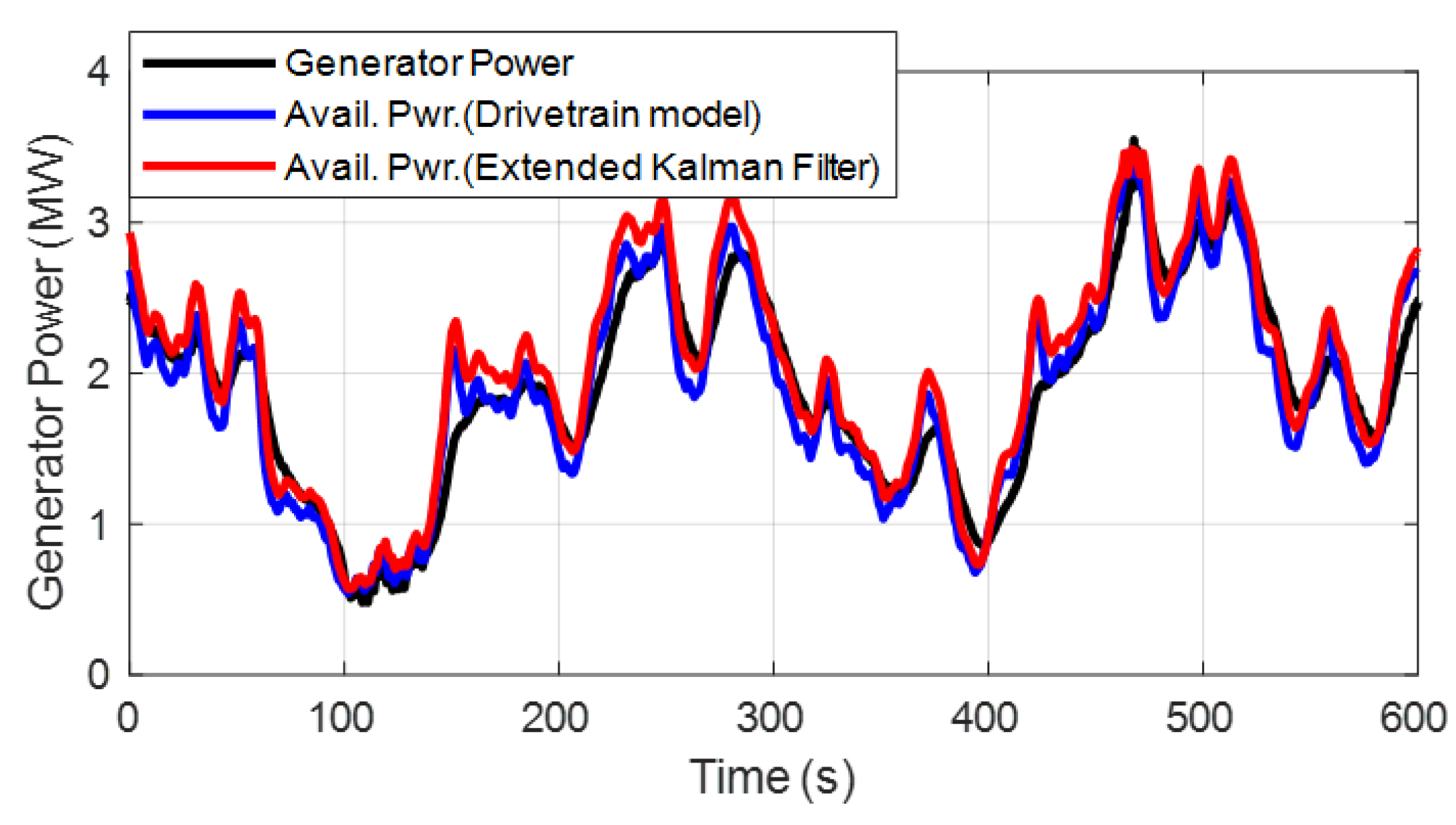
Figure 8 illustrates the results of the dynamic simulation, presenting rotor speed, pitch angle, generator torque, generator output, and available power. Additionally,
Figure 9 displays a representation of generator output and available power. Available power functions as a function of estimated wind speeds, exhibiting trends similar to those of estimated wind speeds.
Table 4 shows the comparison results between generator output and estimated available power, indicating mean errors of −0.58% and 7.29%, and standard deviation errors of 4.07% and 8.37%, respectively. Furthermore,
Table 5 presents the comparison results of root mean square error (RMSE), mean square error (MSE), and mean absolute error (MAE) between generator output and available power. The drive train model method shows lower RMSE compared to the Kalman filter method, and similar trends are observed in MSE and MAE. Specifically, for the drive train model method, the RMSE, MSE, and MAE values are 0.2061 MW, 0.0425 MW, and 0.1672 MW, respectively. For the extended Kalman filter method, the same values are 0.2332 MW, 0.0544 MW, and 0.1818 MW, respectively. The simulation results indicate a slight advantage of the drive train model method in estimating available power, additionally demonstrating that the accuracy of available power estimation varied depending on the applied wind speed estimation methods, leading to the conclusion that more accurate wind speed estimation is needed to improve the estimation accuracy for available power.
4.3. Validation 3: Linear Quadratic Regulator Based on Fuzzy Control Algorithm
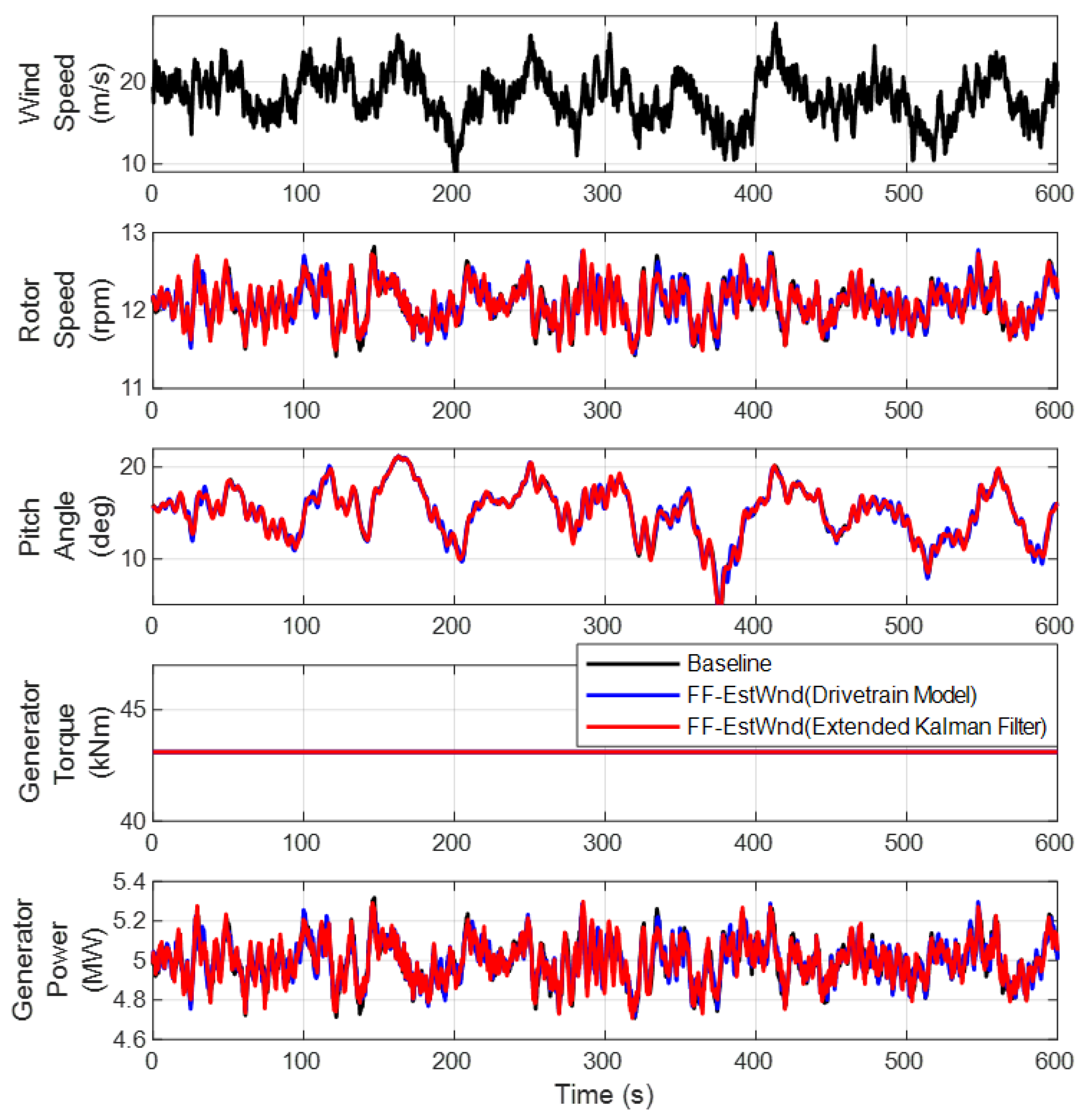
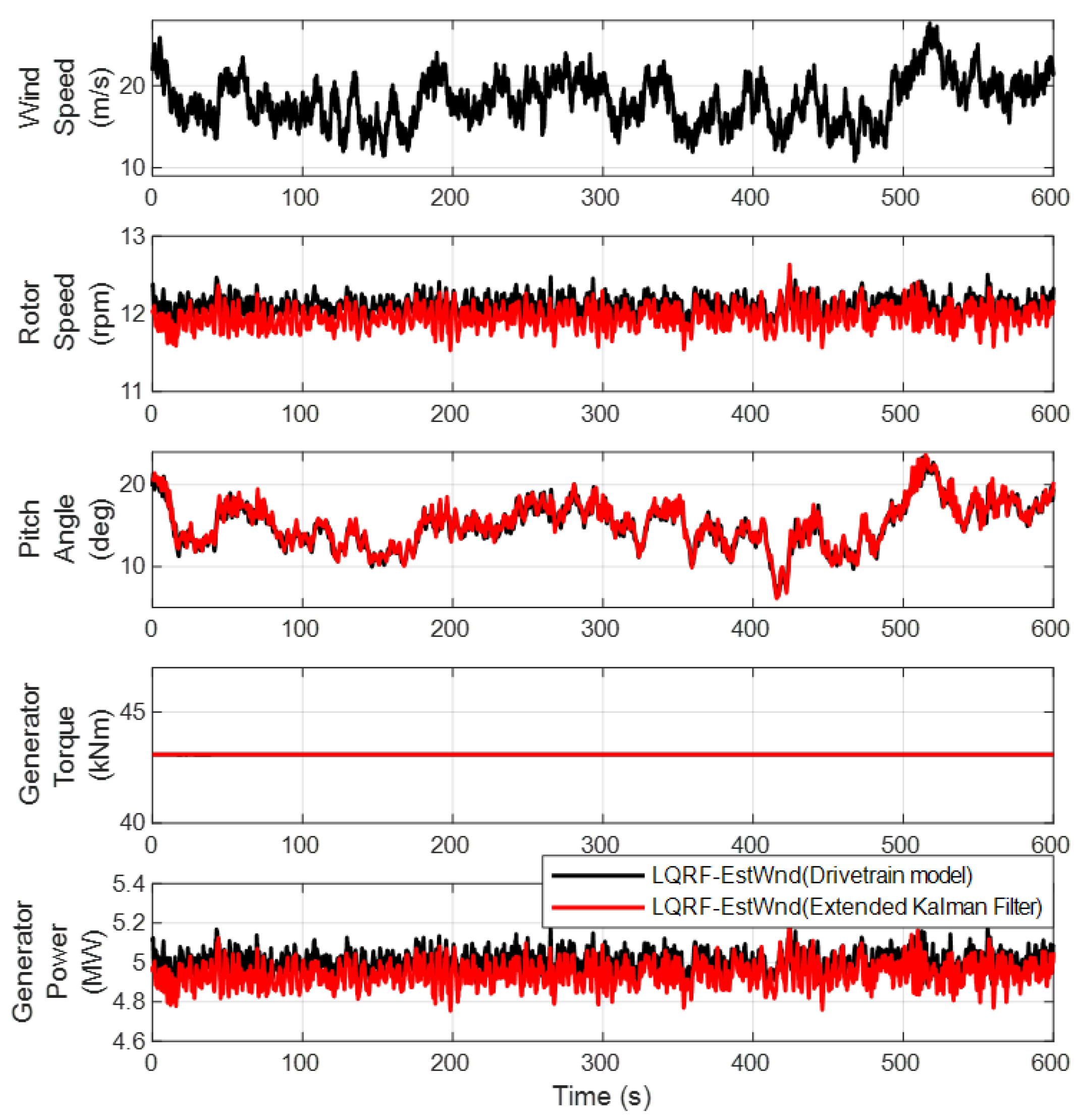
The dynamic simulation was performed using the NREL 5MW model as the target wind turbine. The simulation conditions involved above-rated wind speeds (18 m/s) with a Class A standard turbulence model, and winds from different seeds were applied for wind estimation in the validation of the feed-forward control algorithm. Each condition was executed for 600 s in a dynamic simulation environment.
The results of the validation on the LQRF control algorithm using estimated wind speeds according to different wind speed estimation methods are shown in
Figure 10. The simulation results depict rotor speed, pitch angle, generator torque, and output. The black line represents the simulation results of the LQRF control algorithm based on the drive train model method, while the red line denotes the simulation results based on the extended Kalman Filter method. Although operational performance appears similar, differences in the standard deviations of rotor speed and output can be observed.
Table 6 presents the comparison results of mean and standard deviation for rotor speed and generator output. Slight differences in operational performance can be observed depending on the applied wind speed estimation method. For the LQRF control algorithm using the drive train model method, the standard deviations of rotor speed and generator output are found to be 22.83% and 20.75% lower, respectively, compared to when the Kalman Filter method is applied. According to the simulation results, the performance of the LQRF control algorithm using the drive train model method appears relatively superior. According to the simulation results, although the same control algorithm was applied, the drive train model method showed greater reductions in the standard deviations of rotor speed and generator output, leading to the conclusion that the accuracy of the estimated wind speed is crucial, even when modern control algorithms are applied.
5. Conclusions
In this study, wind speed estimation algorithms employing two methods were designed for the NREL 5MW turbine. To validate the designed wind speed estimation algorithms, comparative verifications were conducted using the feed-forward control, available power estimation, and LQRF control. The first method is based on the drive train model, using measured rotor speed, pitch angle, and generator torque as inputs. The second method utilizes a continuous–discrete extended Kalman filter designed based on the Kalman filter.
To validate the algorithms, dynamic simulations based on the Bladed program were performed, and wind speeds estimated using the two different methods were compared. The comparison results indicated that the wind speed estimation performances were similar; however, considering the design phase of the wind speed estimator, the Kalman filter-based wind speed estimation involves a more complex process, due to the use of relatively more variables.
Firstly, according to simulation of the feed-forward control algorithm results, the algorithm based on the drive train model method reduced the standard deviations of rotor speed and output by 6.04% and 8.70%, respectively, while the Kalman filter-based feed-forward control algorithm reduced them by 2.05% and 1.93%, respectively. The reductions in standard deviation for rotor speed and output performance were relatively superior when the drive train model-based method was applied.
Secondly, additional simulations were conducted using the available power estimation algorithm. The results were evaluated using the means and standard deviations of generator output and estimated available power. The mean errors were −0.58% and 7.29%, and the standard deviation errors were 4.07% and 8.37%, respectively. Furthermore, according to the comparison of the RMSE, MSE, and MAE values, the drive train model-based method showed RMSE, MSE, and MAE values of 0.2061 MW, 0.0425 MW, and 0.1672 MW, respectively, while the Kalman filter method showed RMSE, MSE, and MAE values of 0.2332 MW, 0.0544 MW, and 0.1818 MW, respectively. The simulation results confirmed that the drive train model-based method exhibited relatively superior performance in estimating available power.
Lastly, according to the simulation of the LQRF control algorithm results, the LQRF control algorithm using the Kalman filter-based method showed higher standard deviations of rotor speed and output, by 22.83% and 20.75%, respectively. Therefore, the performance of the LQRF control algorithm using the drive train model-based method was relatively superior. This study’s results, although based on simulations, confirmed that applying different wind speed estimation methods led to varying performance outcomes for the target algorithms. It was found that the drive train model-based method had a more favorable impact on wind turbine control compared to the other method. Consequently, it was concluded that wind speed prediction accuracy must be considered to optimize wind turbine operational performance.
For future research, experimental validation is planned using the wind speed estimation algorithms verified in this study, applied to a 100 kW medium-sized wind turbine, currently under development for reliability- and accuracy-related improvements on the research findings. Additionally, expanding research on performance validation by applying the estimated wind speeds to other control algorithms will be pursued.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}